A Brief Review of the Shape Memory Phenomena in Polymers and Their Typical Sensor Applications

 , ,
, ,
Abstract
:
1. Introduction
2. Working Mechanisms and Shape Memory Phenomena
2.1. Working Mechanisms
2.2. Shape Memory Phenomena
2.3. Further Discussions
3. Typical Sensor Applications
3.1. In-Plane Programming
3.2. Out-of-Plane Programming
3.2.1. Tactual Sensation
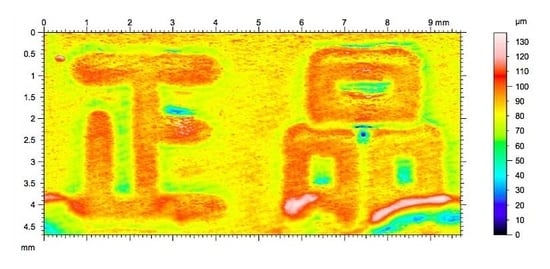
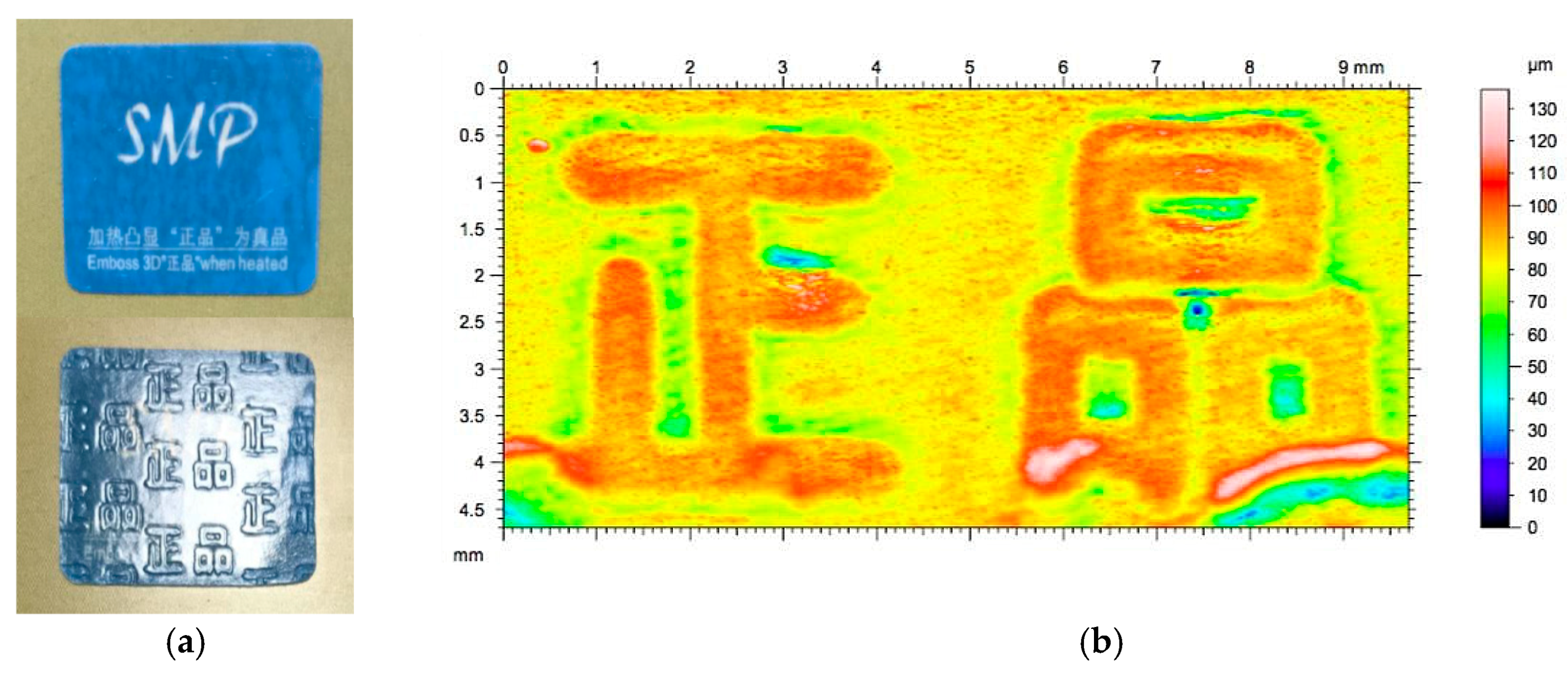
3.2.2. Visual Sensation
3.2.3. Multiple-Shape Memory Effect (SME)
3.2.4. Hydrogel for Wetting Sensors
4. Summary and Outlook
5. Conclusions
Author Contributions
Acknowledgements
Conflicts of Interest
References
- Sun, L.; Huang, W.; Ding, Z.; Zhao, Y.; Wang, C.; Purnawali, H.; Tang, C. Stimulus-responsive shape memory materials: A review. Mater. Des. 2012, 33, 577–640. [Google Scholar] [CrossRef]
- Tsitsilianis, C. Responsive reversible hydrogels from associative “smart” macromolecules. Soft Matter 2010, 6, 2372. [Google Scholar] [CrossRef]
- Hsu, L.; Weder, C.; Rowan, S.J. Stimuli-responsive, mechanically-adaptive polymer nanocomposites. J. Mater. Chem. 2011, 21, 2812–2822. [Google Scholar] [CrossRef]
- Zha, L.; Banik, B.; Alexis, F. Stimulus responsive nanogels for drug delivery. Soft Matter 2011, 7, 5908. [Google Scholar] [CrossRef]
- Iqbal, D.; Samiullah, M.H. Photo-Responsive Shape-Memory and Shape-Changing Liquid-Crystal Polymer Networks. Materials 2013, 6, 116–142. [Google Scholar] [CrossRef] [PubMed]
- Wei, Z.G.; Sandstroröm, R.; Miyazaki, S. Shape-memory materials and hybrid composites for smart systems: Part I Shape-memory materials. J. Mater. Sci. 1998, 33, 3743–3762. [Google Scholar] [CrossRef]
- Behl, M.; Lendlein, A. Shape-memory polymers. Mater. Today 2007, 10, 20–28. [Google Scholar] [CrossRef]
- Huang, W.M.; Ding, Z.; Wang, C.C.; Wei, J.; Zhao, Y.; Purnawali, H. Shape memory materials. Mater. Today 2010, 13, 54–61. [Google Scholar] [CrossRef]
- Westbrook, K.K.; Mather, P.T.; Parakh, V.; Dunn, M.L.; Ge, Q.; Lee, B.M.; Qi, H.J. Two-way reversible shape memory effects in a free-standing polymer composite. Smart Mater. Struct. 2011, 20, 65010. [Google Scholar] [CrossRef]
- Hu, J.; Meng, H.; Li, G.; I Ibekwe, S. A review of stimuli-responsive polymers for smart textile applications. Smart Mater. Struct. 2012, 21, 53001. [Google Scholar] [CrossRef]
- Xie, T. Recent advances in polymer shape memory. Polymer 2011, 52, 4985–5000. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.M.; Zhao, Y.; Wang, C.C.; Ding, Z.; Purnawali, H.; Tang, C.; Zhang, J.L. Thermo/chemo-responsive shape memory effect in polymers: A sketch of working mechanisms, fundamentals and optimization. J. Polym. Res. 2012, 19, 9952. [Google Scholar] [CrossRef]
- Xie, T.; Xiao, X.; Li, J.; Wang, R. Encoding Localized Strain History Through Wrinkle Based Structural Colors. Adv. Mater. 2010, 22, 4390–4394. [Google Scholar] [CrossRef] [PubMed]
- Xie, T.; Page, K.A.; Eastman, S.A. Strain-Based Temperature Memory Effect for Nafion and Its Molecular Origins. Adv. Funct. Mater. 2011, 21, 2057–2066. [Google Scholar] [CrossRef]
- Xie, H.; Cheng, C.-Y.; Li, L.; Deng, X.-Y.; Yang, K.-K.; Wang, Y.-Z. Integrating shape-memory technology and photo-imaging on polymer platform for high-security information storage medium. J. Mater. Chem. C 2018, 6, 10422–10427. [Google Scholar] [CrossRef]
- Kunzelman, J.; Chung, T.; Mather, P.T.; Weder, C. Shape memory polymers with built-in threshold temperature sensors. J. Mater. Chem. 2008, 18, 1082. [Google Scholar] [CrossRef]
- Zhao, Q.; Zou, W.; Luo, Y.; Xie, T. Shape memory polymer network with thermally distinct elasticity and plasticity. Sci. Adv. 2016, 2, e1501297. [Google Scholar] [CrossRef]
- Xie, T. Tunable polymer multi-shape memory effect. Nature 2010, 464, 267–270. [Google Scholar] [CrossRef]
- Sun, L.; Huang, W.M. Mechanisms of the multi-shape memory effect and temperature memory effect in shape memory polymers. Soft Matter 2010, 6, 4403–4406. [Google Scholar] [CrossRef]
- Li, G.; Wang, A. Cold, warm, and hot programming of shape memory polymers. J. Polym. Sci. Part B Polym. Phys. 2016, 54, 1319–1339. [Google Scholar] [CrossRef]
- Wu, X.L.; Huang, W.M.; Lu, H.B.; Wang, C.C.; Cui, H.P. Characterization of polymeric shape memory materials. J. Polym. Eng. 2017, 37, 1–20. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, W.M.; Wang, C.C. Thermo/Chemo-Responsive Shape Memory Effect for Micro/Nano Surface Patterning Atop Polymers. Nanosci. Nanotechnol. Lett. 2012, 4, 862–878. [Google Scholar] [CrossRef]
- Sun, L.; Huang, W.; Wang, T.; Chen, H.; Renata, C.; He, L.; Lv, P.; Wang, C. An overview of elastic polymeric shape memory materials for comfort fitting. Mater. Des. 2017, 136, 238–248. [Google Scholar] [CrossRef]
- Wu, X.L.; Wang, T.X.; Huang, W.M.; Zhao, Y. Thermo-Responsive Shape-Memory Effect and Surface Features in Polycarbonate (PC). Appl. Sci. 2017, 7, 848. [Google Scholar] [CrossRef]
- Wu, X.L.; Huang, W.M.; Ding, Z.; Tan, H.X.; Yang, W.G.; Sun, K.Y. Characterization of the thermoresponsive shape-memory effect in poly (ether ether ketone) (PEEK). J. Appl. Polym. Sci. 2014, 131, 39844. [Google Scholar] [CrossRef]
- Wu, X.L.; Huang, W.M.; Tan, H.X. Characterization of shape recovery via creeping and shape memory effect in ether-vinyl acetate copolymer (EVA). J. Polym. Res. 2013, 20, 150. [Google Scholar] [CrossRef]
- Wu, X.L.; Huang, W.M.; Seow, Z.G.; Chin, W.S.; Yang, W.G.; Sun, K.Y. Two-step shape recovery in heating-responsive shape memory polytetrafluoroethylene and its thermally assisted self-healing. Smart Mater. Struct. 2013, 22, 125023. [Google Scholar] [CrossRef]
- Purnawali, H.; Xu, W.W.; Zhao, Y.; Ding, Z.; Wang, C.C.; Huang, W.M.; Fan, H. Poly(methyl methacrylate) for active disassembly. Smart Mater. Struct. 2012, 21, 75006. [Google Scholar] [CrossRef]
- Salvekar, A.V.; Zhou, Y.; Huang, W.M.; Wong, Y.S.; Venkatraman, S.; Shen, Z.; Zhu, G.; Cui, H.P. Shape/temperature memory phenomena in un-crosslinked poly-ε-caprolactone (PCL). Eur. Polym. J. 2015, 72, 282–295. [Google Scholar] [CrossRef]
- Lu, H.; Huang, W.M.; Wu, X.L.; Ge, Y.C.; Zhang, F.; Zhao, Y.; Geng, J. Heating/ethanol-response of poly methyl methacrylate (PMMA) with gradient pre-deformation and potential temperature sensor and anti-counterfeit applications. Smart Mater. Struct. 2014, 23, 67002. [Google Scholar] [CrossRef]
- Behl, M.; Lendlein, A. Triple-shape polymers. J. Mater. Chem. 2010, 20, 3335–3345. [Google Scholar] [CrossRef]
- Behl, M.; Bellin, I.; Kelch, S.; Wagermaier, W.; Lendlein, A. One-Step Process for Creating Triple-Shape Capability of AB Polymer Networks. Adv. Funct. Mater. 2009, 19, 102–108. [Google Scholar] [CrossRef]
- Bellin, I.; Kelch, S.; Langer, R.; Lendlein, A. Polymeric triple-shape materials. Proc. Natl. Acad. Sci. USA 2006, 103, 18043–18047. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pretsch, T. Triple-shape properties of a thermoresponsive poly (ester urethane). Smart Mater. Struct. 2010, 19, 015006. [Google Scholar] [CrossRef]
- Bothe, M.; Mya, K.Y.; Lin, E.M.J.; Yeo, C.C.; Lu, X.; He, C.; Pretsch, T. Triple-shape properties of star-shaped POSS-polycaprolactone polyurethane networks. Soft Matter 2012, 8, 965–972. [Google Scholar] [CrossRef]
- Rubio, R.; Vilas, J.L.; Rodriguez, M.; León, L.M.; Cuevas, J.M.; Germán, L.; Laza, J.M. Triple-shape memory effect of covalently crosslinked polyalkenamer based semicrystalline polymer blends. Soft Matter 2012, 8, 4928. [Google Scholar]
- Kumar, U.N.; Kratz, K.; Behl, M.; Lendlein, A. Shape-memory properites of magnetically active triple-shape nanocomposities based on a grafted polymer network with two crystallizable switching segments. eXPRESS Polym. Lett. 2012, 6, 26–40. [Google Scholar] [CrossRef]
- Luo, X.; Iversen, C.B.; Ge, Q.; Mather, P.T.; Dunn, M.L.; Qi, H.J. Mechanisms of triple-shape polymeric composites due to dual thermal transitions. Soft Matter 2013, 9, 2212. [Google Scholar]
- Guo, J.; Safranski, D.L.; Xiao, R.; Nguyen, T.D. Solvent-driven temperature memory and multiple shape memory effects. Soft Matter 2015, 11, 3977–3985. [Google Scholar]
- Yu, K.; Qi, H.J. Temperature memory effect in amorphous shape memory polymers. Soft Matter 2014, 10, 9423–9432. [Google Scholar] [CrossRef]
- Miaudet, P.; Derré, A.; Maugey, M.; Zakri, C.; Piccione, P.M.; Inoubli, R.; Poulin, P. Shape and Temperature Memory of Nanocomposites with Broadened Glass Transition. Science 2007, 318, 1294–1296. [Google Scholar] [CrossRef] [PubMed]
- Capelot, M.; Leibler, L.; Unterlass, M.M.; Tournilhac, F. Catalytic Control of the Vitrimer Glass Transition. ACS Macro Lett. 2012, 1, 789–792. [Google Scholar] [CrossRef]
- Denissen, W.; Winne, J.M.; Du Prez, F.E. Vitrimers: Permanent organic networks with glass-like fluidity. Chem. Sci. 2016, 7, 30–38. [Google Scholar] [CrossRef] [PubMed]
- Zhang, G.; Peng, W.; Wu, J.; Zhao, Q.; Xie, T. Digital coding of mechanical stress in a dynamic covalent shape memory polymer network. Nat. Commun. 2018, 9, 4002. [Google Scholar] [CrossRef]
- Wu, J.; Yuan, C.; Ding, Z.; Isakov, M.; Mao, Y.; Wang, T.; Dunn, M.L.; Qi, H.J. Multi-shape active composites by 3D printing of digital shape memory polymers. Sci. Rep. 2016, 6, 24224. [Google Scholar] [CrossRef]
- Siegel, A.C.; Phillips, S.T.; Dickey, M.D.; Lu, N.; Suo, Z.; Whitesides, G.M. Foldable Printed Circuit Boards on Paper Substrates. Adv. Funct. Mater. 2010, 20, 28–35. [Google Scholar] [CrossRef]
- Zhou, Y.; Huang, W.M.; Kang, S.F.; Wu, X.L.; Lu, H.B.; Fu, J.; Cui, H. From 3D to 4D printing: Approaches and typical applications. J. Mech. Sci. Technol. 2015, 29, 4281–4288. [Google Scholar] [CrossRef]
- Huang, W.M.; Yang, B.; Fu, Y.Q. Polyurethane Shape Memory Polymers; CRC Press: New York, NY, USA, 2011. [Google Scholar]
- Yang, B.; Huang, W.M.; Li, C.; Lee, C.M.; Li, L. On the enects of moisture in a polyurethane shape memory polymer. Smart Mater. Struct. 2004, 13, 191–195. [Google Scholar] [CrossRef]
- Weems, A.C.; Wacker, K.T.; Carrow, J.K.; Boyle, A.J.; Maitland, D.J. Shape memory polyurethanes with oxidation-induced degradation: In vivo and in vitro correlations for endovascular material applications. Acta Biomater. 2017, 59, 33–44. [Google Scholar] [CrossRef]
- Weems, A.; Szafron, J.; Easley, A.; Herting, S.; Smolen, J.; Maitland, D. Shape Memory Polymers with Enhanced Visibility for Magnetic Resonance- and X-Ray Imaging Modalities. Acta Biomater. 2017, 54, 45–57. [Google Scholar] [CrossRef]
- Huang, W.M.; Yang, B.; An, L.; Li, C.; Chan, Y.S. Water-driven programmable polyurethane shape memory polymer: Demonstration and mechanism. Appl. Phys. Lett. 2005, 86, 114105. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, W.; Lu, H.; Sun, L. Thermo-/chemo-responsive shape memory/change effect in a hydrogel and its composites. Mater. Des. 2014, 53, 1077–1088. [Google Scholar] [CrossRef]
- Salvekar, A.V.; Wong, Y.S.; Shen, Z.X.; Huang, W.M.; Xiao, R.; Venkatraman, S.S.; Tay, K.H. Water-Responsive Shape Recovery Induced Buckling in Biodegradable Photo-Cross-Linked Poly(ethylene glycol) (PEG) Hydrogel. Accounts Chem. Res. 2017, 50, 141–150. [Google Scholar] [CrossRef] [PubMed]
- Steelman, Z.A.; Weems, A.C.; Traverso, A.J.; Szafron, J.M.; Maitland, D.J.; Yakovlev, V.V. Revealing the glass transition in shape memory polymers using Brillouin spectroscopy. Appl. Phys. Lett. 2017, 111, 241904. [Google Scholar] [CrossRef] [PubMed]
- Sun, L.; Wang, T.X.; Leow, W.C.; Huang, W.M.; Cui, H.; Gao, X.Y. Temperature memory effect in differential scanning calorimeter test in thermoplastic polyurethane. J. Polym. Res. 2016, 23, 63. [Google Scholar] [CrossRef]
- Wang, T.X.; Huang, W.M.; Xiao, R.; Lu, H.B.; Kang, S.F. Temperature memory effect and its stability revealed via differential scanning calorimetry in ethylene-vinyl acetate (EVA) within glass transition range. J. Polym. Sci. Part B Polym. Phys. 2016, 54, 1731–1737. [Google Scholar] [CrossRef]
- Gu, Z.-Z.; Uetsuka, H.; Takahashi, K.; Nakajima, R.; Onishi, H.; Fujishima, A.; Sato, O. Structural Color and the Lotus Effect. Angew. Chem. Int. Ed. 2003, 42, 894–897. [Google Scholar] [CrossRef]
- Liu, Y.S.; Chang, Y.; Ling, Z.Y.; Hu, X.; Li, Y. Structural coloring of aluminum. Electrochem. Commun. 2011, 13, 1336–1339. [Google Scholar] [CrossRef]
- Grimes, A.; Long, M.; Ferri, C.G.L.; Rich, B.D.; Ghosh, S.; Ghosh, S.; Lee, L.P.; Gopinathan, A.; Khine, M.; Fu, C.-C.; et al. Tunable Nanowrinkles on Shape Memory Polymer Sheets. Adv. Mater. 2009, 21, 4472–4476. [Google Scholar] [Green Version]
- Huang, W.M.; Lu, H.B.; Zhao, Y.; Ding, Z.; Wang, C.C.; Zhang, J.L.; Sun, L.; Fu, J.; Gao, X.Y. Instability/collapse of polymeric materials and their structures in stimulus-induced shape/surface morphology switching. Mater. Des. 2014, 59, 176–192. [Google Scholar] [CrossRef]
- Sun, L.; Wang, T.X.; Zakee, M.H.I.B.M.; Rosli, M.S.B.; Lee, Y.X.; Huang, W.M. Self-surface wrinkling atop acrylonitrile butadiene styrene (ABS) via heating-responsive shape memory effect. Surf. Rev. Lett. 2019. [Google Scholar] [CrossRef]
- Wang, T.; Au, J.; Salvekar, A.; Weng, Y.; Huang, W. Advanced Shape Memory Technology for Product Design, Manufacturing and Recycling. Mater. China 2016, 35, 613–621. [Google Scholar]
- Liu, N.; Xie, Q.; Huang, W.M.; Phee, S.J.; Guo, N.Q. Formation of micro protrusion arrays atop shape memory polymer. J. Micromech. Microeng. 2008, 18, 27001. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, W.M.; Fu, Y.Q. Formation of micro/nano-scale wrinkling patterns atop shape memory polymers. J. Micromech. Microeng. 2011, 21, 67007. [Google Scholar] [CrossRef]
- Sun, L.; Wang, T.X.; Huang, W.M. Monitoring minor over-heating/cooling temperature based on the temperature memory effect in shape memory materials via DSC. J. Therm. Anal. Calorim. 2018, 133, 1649–1661. [Google Scholar] [CrossRef]
- Behl, M.; Kratz, K.; Noechel, U.; Sauter, T.; Lendlein, A. Temperature-memory polymer actuators. Proc. Natl. Acad. Sci. 2013, 110, 12555–12559. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kratz, K.; Voigt, U.; Lendlein, A. Temperature-Memory Effect of Copolyesterurethanes and their Application Potential in Minimally Invasive Medical Technologies. Adv. Funct. Mater. 2012, 22, 3057–3065. [Google Scholar] [CrossRef]
- Fritzsche, N.; Pretsch, T. Programming of Temperature-Memory Onsets in a Semicrystalline Polyurethane Elastomer. Macromolecules 2014, 47, 5952–5959. [Google Scholar] [CrossRef]
- Mirtschin, N.; Pretsch, T. Designing temperature-memory effects in semicrystalline polyurethane. RSC Adv. 2015, 5, 46307–46315. [Google Scholar] [CrossRef] [Green Version]
- Behl, M.; Kratz, K.; Zotzmann, J.; Nöchel, U.; Lendlein, A. Reversible Bidirectional Shape-Memory Polymers. Adv. Mater. 2013, 25, 4466–4469. [Google Scholar] [CrossRef]
- Pandini, S.; Passera, S.; Messori, M.; Paderni, K.; Toselli, M.; Gianoncelli, A.; Bontempi, E.; Riccò, T. Two-way reversible shape memory behaviour of crosslinked poly(epsilon-caprolactone). Polymer 2012, 53, 1915–1924. [Google Scholar] [CrossRef]
- Chung, T.; Romo-Uribe, A.; Mather, P.T. Two-Way Reversible Shape Memory in a Semicrystalline Network. Macromolecules 2008, 41, 184–192. [Google Scholar] [CrossRef]
- Burke, K.A.; Rousseau, I.A.; Mather, P.T. Reversible actuation in main-chain liquid crystalline elastomers with varying crosslink densities. Polymer 2014, 55, 5897–5907. [Google Scholar] [CrossRef]
- Zhou, J.; Turner, S.A.; Brosnan, S.M.; Li, Q.; Carrillo, J.-M.Y.; Nykypanchuk, D.; Gang, O.; Ashby, V.S.; Dobrynin, A.V.; Sheiko, S.S. Shapeshifting: Reversible Shape Memory in Semicrystalline Elastomers. Macromolecules 2014, 47, 1768–1776. [Google Scholar] [CrossRef]
- Mao, Y.; Ding, Z.; Yuan, C.; Ai, S.; Isakov, M.; Wu, J.; Wang, T.; Dunn, M.L.; Qi, H.J. 3D Printed Reversible Shape Changing Components with Stimuli Responsive Materials. Sci. Rep. 2016, 6, 24761. [Google Scholar] [CrossRef] [PubMed]
- Kuang, W.; Mather, P.T. Tuning of reversible actuation via copolymerization of ROMP-based semicrystalline polymers. Polymer 2018, 156, 228–239. [Google Scholar] [CrossRef]
- Bothe, M.; Pretsch, T. Two-Way Shape Changes of a Shape-Memory Poly(ester urethane). Macromol. Chem. Phys. 2012, 213, 2378–2385. [Google Scholar] [CrossRef]
- Yang, W.G.; Lu, H.; Huang, W.M.; Qi, H.J.; Wu, X.L.; Sun, K.Y. Advanced Shape Memory Technology to Reshape Product Design, Manufacturing and Recycling. Polymers 2014, 6, 2287–2308. [Google Scholar] [CrossRef]
- Toensmeier, P.A. Shape memory polymers reshape product design. Plast. Eng. 2005, 61, 10–11. [Google Scholar]
- Wang, T.; Huang, W.; Aw, J.; He, L.; Vettorello, M. Comfort fitting using shape memory polymeric foam. J. Test. Eval. 2017, 45, 1201–1212. [Google Scholar] [CrossRef]
- Chazeau, L.; Brown, J.D.; Yanyo, L.C.; Sternstein, S.S. Modulus recovery kinetics and other insights into the payne effect for filled elastomers. Polym. Compos. 2000, 21, 202–222. [Google Scholar] [CrossRef]
- Diani, J.; Fayolle, B.; Gilormini, P. A review on the Mullins effect. Eur. Polym. J. 2009, 45, 601–612. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.X.; Renata, C.; Chen, H.M.; Huang, W.M. Elastic Shape Memory Hybrids Programmable at Around Body-Temperature for Comfort Fitting. Polymers 2017, 9, 674. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.C.; Huang, W.M.; Ding, Z.; Zhao, Y.; Purnawali, H.; Zheng, L.; Fan, H.; He, C.B. Rubber-like shape memory polymeric materials with repeatable thermal-assisted healing function. Smart Mater. Struct. 2012, 21, 115010. [Google Scholar] [CrossRef]
- Ecker, M.; Pretsch, T. Durability of switchable QR code carriers under hydrolytic and photolytic conditions. Smart Mater. Struct. 2013, 22, 94005. [Google Scholar] [CrossRef]
- Ecker, M.; Pretsch, T. Multifunctional poly(ester urethane) laminates with encoded information. RSC Adv. 2014, 4, 286–292. [Google Scholar] [CrossRef]
- Pretsch, T.; Ecker, M.; Schildhauer, M.; Maskos, M. Switchable information carriers based on shape memory polymer. J. Mater. Chem. 2012, 22, 7757. [Google Scholar] [CrossRef]
- Sun, L.; Huang, W.M.; Wang, C.C.; Zhao, Y.; Ding, Z.; Purnawali, H. Optimization of the shape memory effect in shape memory polymers. J. Polym. Sci. Part A Polym. Chem. 2011, 49, 3574–3581. [Google Scholar] [CrossRef]
- Zhao, Y.; Cai, M.; Huang, W.M.; Tong, T.H. Patterning atop shape memory polymers and their characterization. In Proceedings of the EPD Congress 2010—Proceedings of Sessions and Symposia, Held during TMS 2010 Annual Meeting and Exhibition Seattle, Seattle, WA, USA, 14–18 February 2010; pp. 167–174. [Google Scholar]
- Zhao, Y.; Wang, C.C.; Huang, W.M.; Purnawali, H.; An, L. Formation of micro protrusive lens arrays atop poly(methyl methacrylate). Opt. Express 2011, 19, 26000–26005. [Google Scholar] [CrossRef]
- Huang, W.M.; Zhao, Y.; Zhang, J.L.; Lu, H.B. Chemo-responsive Shape Memory/change Effect in Polymeric Materials Based on Transport Phenomena. J. Fluid Flow Heat Mass Transf. 2014, 1, 16–22. [Google Scholar] [CrossRef]
- Grillard, F.; Zakri, C.; Gaillard, P.; Korzhenko, A.; Néri, W.; Poulin, P. How polymers lose memory with age. Soft Matter 2014, 10, 8985–8991. [Google Scholar] [CrossRef] [PubMed]
- Ding, Z. Shape Memory Hybrids: Mechanism and Design for Tailored Properties. Ph.D. Dissertation, Nanyang Technological University, Singapore, 2011. [Google Scholar]
- Sun, L.; Huang, W.M.; Lu, H.; Lim, K.J.; Zhou, Y.; Wang, T.X.; Gao, X.Y. Heating-Responsive Shape-Memory Effect in Thermoplastic Polyurethanes with Low Melt-Flow Index. Macromol. Chem. Phys. 2014, 215, 2430–2436. [Google Scholar] [CrossRef]
- Khudiyev, T.; Ozgur, E.; Yaman, M.; Bayindir, M. Structural Coloring in Large Scale Core–Shell Nanowires. Nano Lett. 2011, 11, 4661–4665. [Google Scholar] [CrossRef]
- Chen, T.; Bakhshi, H.; Liu, L.; Ji, J.; Agarwal, S. Combining 3D Printing with Electrospinning for Rapid Response and Enhanced Designability of Hydrogel Actuators. Adv. Funct. Mater. 2018, 28, 1800514. [Google Scholar] [CrossRef]
- He, X.-X.; Zheng, J.; Yu, G.-F.; You, M.-H.; Yu, M.; Ning, X.; Long, Y.-Z. Near-Field Electrospinning: Progress and Applications. J. Phys. Chem. C 2017, 121, 8663–8678. [Google Scholar] [CrossRef]
- Jiang, X.; Huang, X.; Huang, W.M.; Wu, X.L.; Wei, M. Anti-counterfeit shape memory polymeric labels with a water marker. China Brand Anti-Counterfeiting 2013, 9, 72–73. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polymer (Reference) | Activation Temperature | Main Features | Possible Supplier |
|---|---|---|---|
| ABS [62] | Tg: 105 °C | Thermo-plastic Excellent heating-responsive SME | Professional Plastics Pte, Ltd., Singapore |
| EVA [26] | Tg: 60 °C | Thermo-plastic; Excellent heating/chloroform-responsive SME | Polyfluo Asia Private Limited, Singapore |
| PC [24] | Tg: 142 °C | Thermo-plastic Excellent heating-responsive SME | Polyfluo Asia Private Limited, Singapore |
| PCL [29] | Tm: 55 °C | Thermo-plastic; Bio-degradable Excellent heating-responsive SME Programmed at low temperatures | Perstorp, UK |
| PEEK [25] | Tg: 155 °C | Thermo-plastic Excellent heating-responsive SME | Evonik Degussa through Professional Plastics Pte, Ltd. (Singapore) |
| PLA [47] | Tg: 65 °C | Thermo-plastic; Bio-degradable Good heating-responsive SME | eSUN, PR China (filament for 3D printing) |
| PMMA [28,30,91] | Tg: 115 °C | Thermo-plastic; Good heating/ethanol-responsive SME | Ying Kwang Acrylic, Singapore |
| PS [12,65] | Tg: 65 °C | Thermo-set; Good heating/acetone-responsive SME | Cornerstone Research Group, Inc., USA |
| PTFE [27] | Tg: 65 °C Tm: 325 °C | Thermo-plastic Excellent heating-responsive SME Two-step recovery upon heating | Polyfluo Asia Private Limited, Singapore |
| PU [52] | Tg: 35~65 °C | Thermo-plastic/thermo-set Biocompatible; Excellent heating/ethanol/water-responsive SME | SMP Technologies, Inc., Japan |
| PVA [47] | Tg: 30 °C | Thermo-plastic Excellent heating-responsive SME Water-responsive SME | eSUN, PR China (filament for 3D printing) |
| TPU [95] | Tm: 55 °C | Thermo-plastic/vitrimer Excellent heating-responsive SME | Taiwan PU Corporation (TPUCO), Taiwan |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, L.; Wang, T.X.; Chen, H.M.; Salvekar, A.V.; Naveen, B.S.; Xu, Q.; Weng, Y.; Guo, X.; Chen, Y.; Huang, W.M. A Brief Review of the Shape Memory Phenomena in Polymers and Their Typical Sensor Applications. Polymers 2019, 11, 1049. https://doi.org/10.3390/polym11061049
Sun L, Wang TX, Chen HM, Salvekar AV, Naveen BS, Xu Q, Weng Y, Guo X, Chen Y, Huang WM. A Brief Review of the Shape Memory Phenomena in Polymers and Their Typical Sensor Applications. Polymers. 2019; 11(6):1049. https://doi.org/10.3390/polym11061049
Chicago/Turabian StyleSun, Li, Tao Xi Wang, Hong Mei Chen, Abhijit Vijay Salvekar, Balasundaram Selvan Naveen, Qinwei Xu, Yiwei Weng, Xinli Guo, Yahui Chen, and Wei Min Huang. 2019. "A Brief Review of the Shape Memory Phenomena in Polymers and Their Typical Sensor Applications" Polymers 11, no. 6: 1049. https://doi.org/10.3390/polym11061049