1. Introduction
While Global Navigation Satellite Systems (GNSS) based outdoor navigation has greatly advanced over the past few decades, positioning and navigation in indoor and deep urban areas are still open issues [
1]. The challenges include unavailable or degraded GNSS signals, complex indoor environments, necessity of using low-grade devices,
etc. Wireless positioning technologies have been applied to provide long-term absolute positions [
2]. Especially, as WiFi receivers are ubiquitous in consumer devices such as smartphones, it is feasible to implement WiFi positioning in public areas with existing WiFi infrastructures. WiFi fingerprinting approaches based on received signal strengths (RSS) have gained a large amount of attention, as they can provide position without any knowledge of the access point (AP) location or signal-propagation model [
3]. However, the utilization of WiFi requires the creation and maintenance of a network. Furthermore, RSS fluctuate significantly due to obstructions, reflections [
4], and multipath effects [
5]. Fluctuations of RSS have limited the promotion of wireless positioning technologies [
6].
Advances in Micro-Electro-Mechanical Systems (MEMS) technology have made it possible to produce chip-based sensors, such as inertial sensors (
i.e., accelerometers and gyros) and magnetometers. MEMS sensors have become appropriate candidates for motion tracking and navigation applications because they are small and lightweight, consume little power, and are extremely low-cost [
7]. Especially, inertial sensors are ideal for providing continuous information in indoor/outdoor environments because they are not dependent on the transmission or reception of signals from an external source [
8]. However, inertial sensors provide only short-term accuracy and suffer from accuracy degradation over time due to the existence of sensor errors [
9]. Calibration is a useful way to remove many deterministic sensor errors and improve sensor-based navigation [
10]; however, MEMS inertial sensors suffer from significant run-to-run biases and thermal drifts [
11]. Especially, the heading error will grow when there is no aiding information [
12]. Magnetometers can assist the heading estimation by sensing the geomagnetic field [
13]. Nevertheless, the local magnetic field is susceptible to interferences from man-made infrastructure in indoor or urban environments [
14], which makes magnetometer-derived heading angle unreliable. Magnetic interference is a critical issue when magnetometers are used as a compass indoors.
However, the indoor magnetic interference can also be exploited as an advantage by leveraging the magnetic abnormalities as fingerprints [
15,
16]. The magnetic matching (MM) approach has been proposed based on the hypothesis that the indoor magnetic field is stable over time and non-uniform (
i.e., changes significantly) with location [
17,
18]. MM is achieved in two phases (steps): The offline training (pre-survey) phase and the online positioning phase. The training phase is conducted to build or update a “location, magnetic intensity” database (DB) that consists of a set of reference points (RPs) with known coordinates and the magnetic intensity on these RPs, while the positioning step is implemented to find the closest match between the features of the measured magnetic intensity and those stored in the DB. While MM utilizes a similar idea to WiFi fingerprinting, it is independent from any infrastructure, as the magnetic field is omnipresent. The challenge for MM is that magnetic data only consists of three components. Because the heading is generally unknown, it is only feasible to extract two components with the help of accelerometers,
i.e., vertical magnetic intensity and horizontal magnetic intensity (or total magnetic intensity and inclination). To increase the magnetic fingerprint dimension without extra sensors, the profile-matching method has been proposed [
19]. A sequence of observations are saved in the memory and then compared with the candidate profiles stored in the DB. There are well-developed profile-matching methods such as terrain contour matching (TERCOM) [
18,
19] and iterative closest contour point (ICCP) [
20]. To obtain the optimal match, the profile length should be long enough to show the profile feature; moreover, the length of the measured profile should be the same as that of the stored profiles. However, for indoor cases, sensors are low-end and there is no effective constraint if the device is not fixed on the body (e.g., on-foot or in-belt). Thus, the sensor-based navigation error will accumulate quickly and make it difficult to measure the accurate moving distance [
21]. In this paper, we calculate the rough length of the measured profile using the steps detected by accelerometers. Because accurate and real-time step-length estimation is still an open issue in pedestrian navigation, we utilize the dynamic time warping (DTW) algorithm for matching with inaccurate profile length [
22].
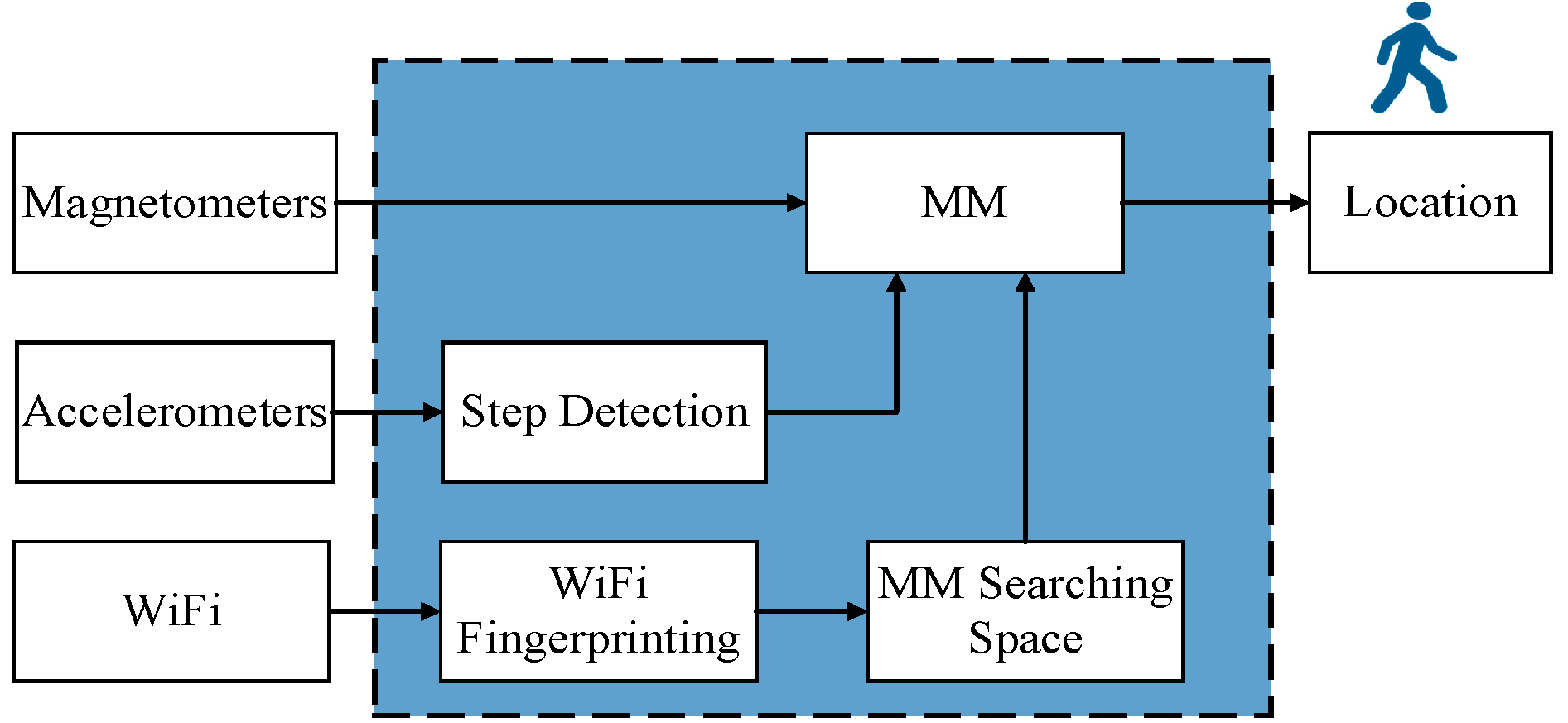
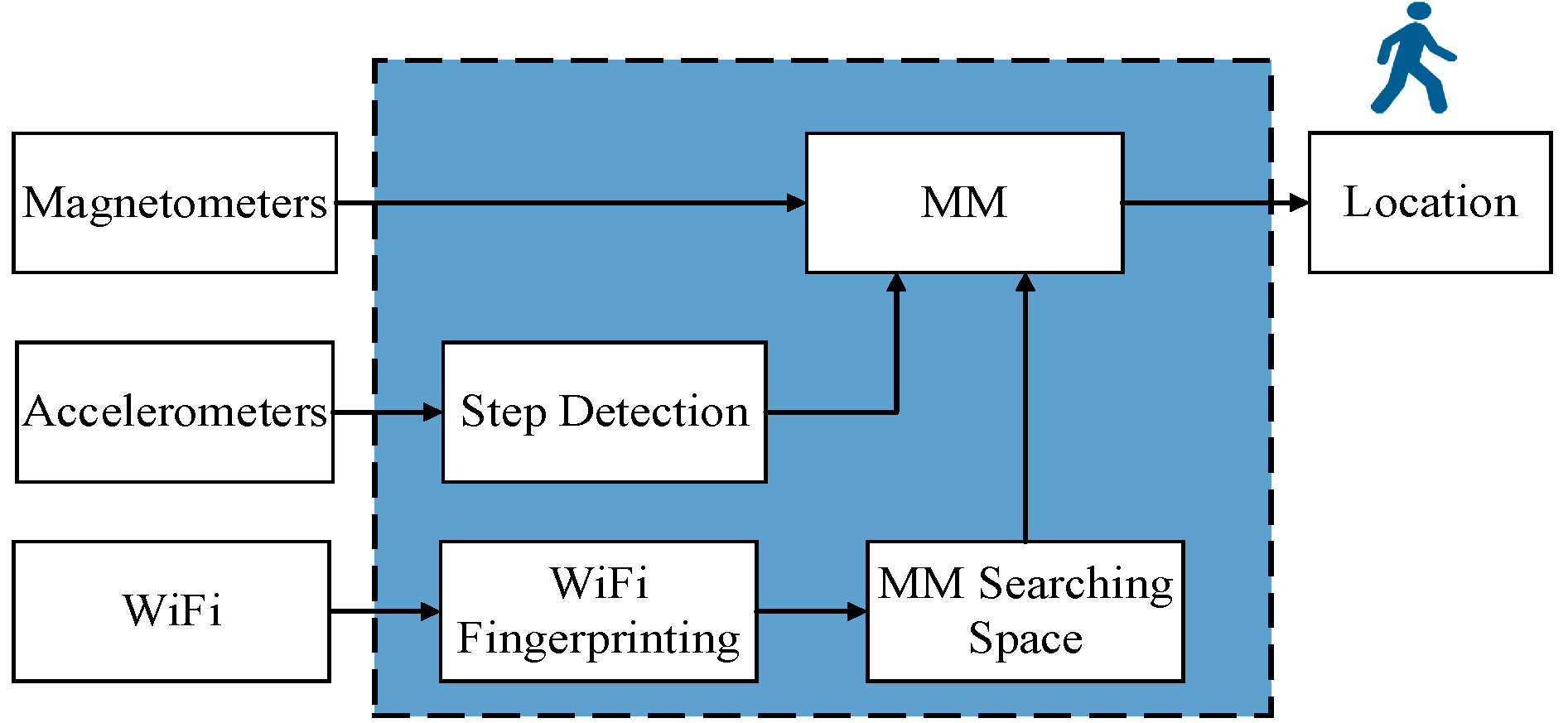
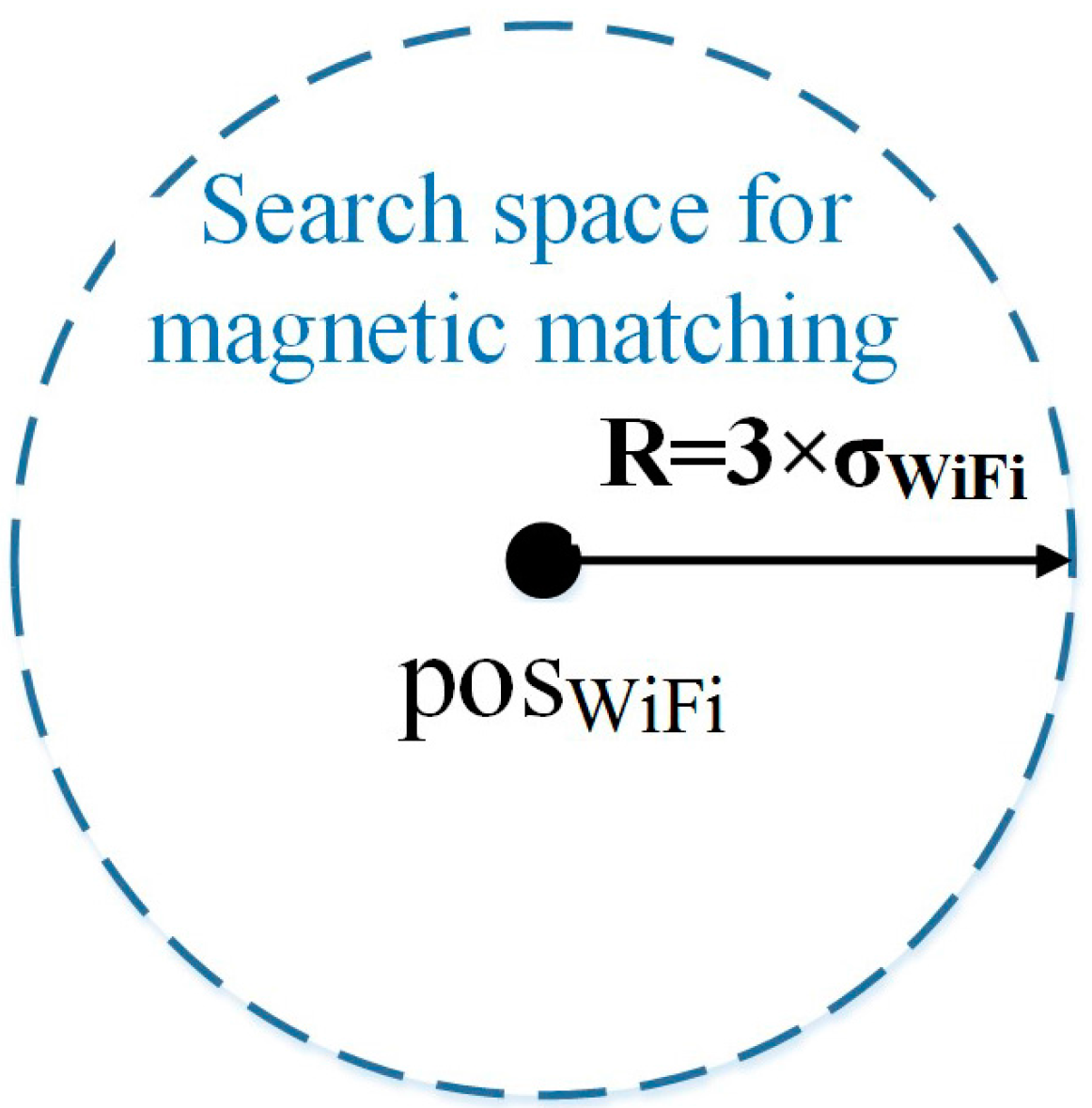
This paper presents a WiFi-aided MM navigation algorithm that uses off-the-shelf sensors in consumer portable devices and existing WiFi infrastructures. The basic idea is using WiFi results to limit the MM search space, so as to reduce both the mismatching rate and the computational load. This algorithm was designed after comparing WiFi and MM, and taking advantage of the merits of each technology. We found that MM results had small error fluctuations but had a significant mismatch rate (i.e., the rate of matching to an incorrect point that was more than 20 m away from the true value). In contrast, WiFi fingerprinting can provided results with low mismatch rate; however, the WiFi fingerprinting accuracy strongly depended on the signal distributions. Finally, the proposed WiFi-aided MM provided more reliable results than either the independent use of WiFi or MM and had a lower mismatch rate.
The paper is organized as follows:
Section 2 outlines the architecture of the WiFi-aid magnetic matching algorithm and a detailed description of each component;
Section 3 investigates the navigation performance of different technologies; and
Section 4 draws the conclusions.
3. Tests and Analysis
Two sets of tests were conducted at the University of Calgary, one on the main floor of the Energy Environment Experiential Learning (EEEL) building, and the other is on the lower main floor of the Engineering building (ENB). These two buildings were chosen because they have different types of indoor environments. EEEL is a relatively new building with well-equipped infrastructure. Accordingly, there are more WiFi APs (the average number of RSS was over 15 in this building) and severe magnetic interferences (the change of magnetic intensity reached 0.4 Gauss). In contrast, the lower main floor of ENB is mainly used for walking; thus, there are less APs (the average number of RSS was nearly seven) and less magnetic interferences (the change of magnetic intensity was below 0.25 Gauss). The sizes of tested areas in EEEL and ENB were around 120 × 40 m2 and 140 × 60 m2, respectively. The tests were performed with Samsung Galaxy S3 and S4 (S3 for training and S4 for positioning) smartphones. We conducted the tests in this paper with the handheld mode to focus on the hybrid navigation.
3.1. Tests at EEEL
3.1.1. Training Phase
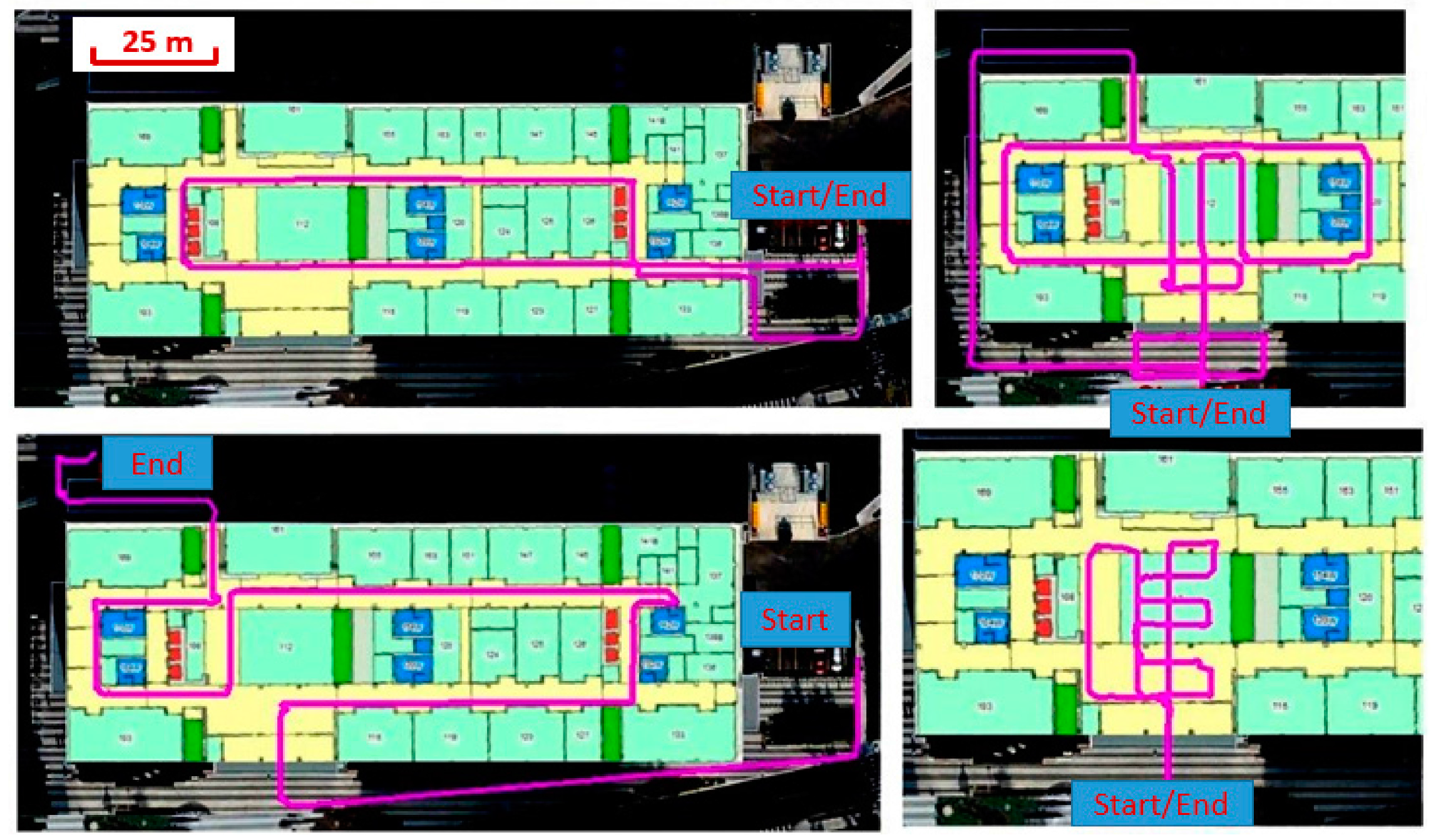
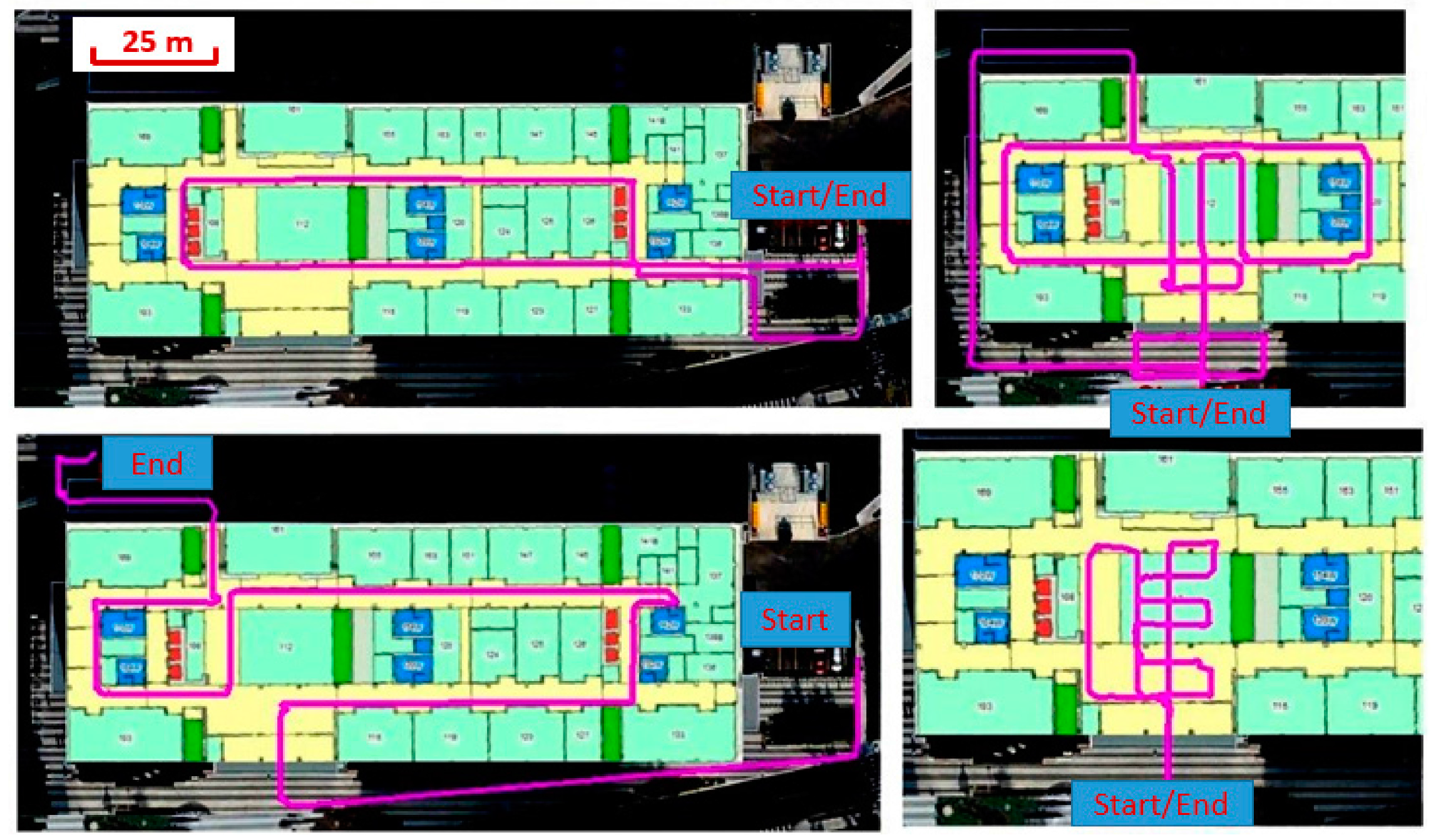
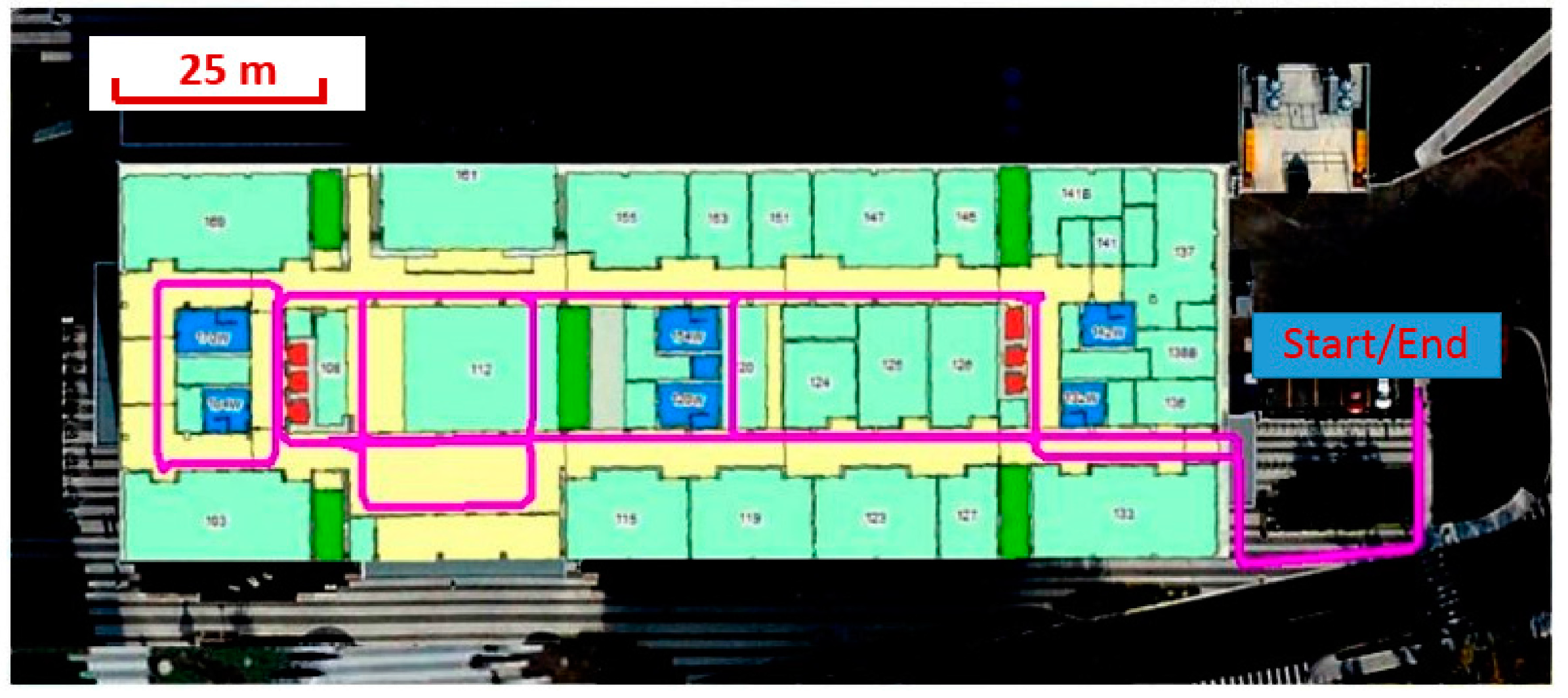
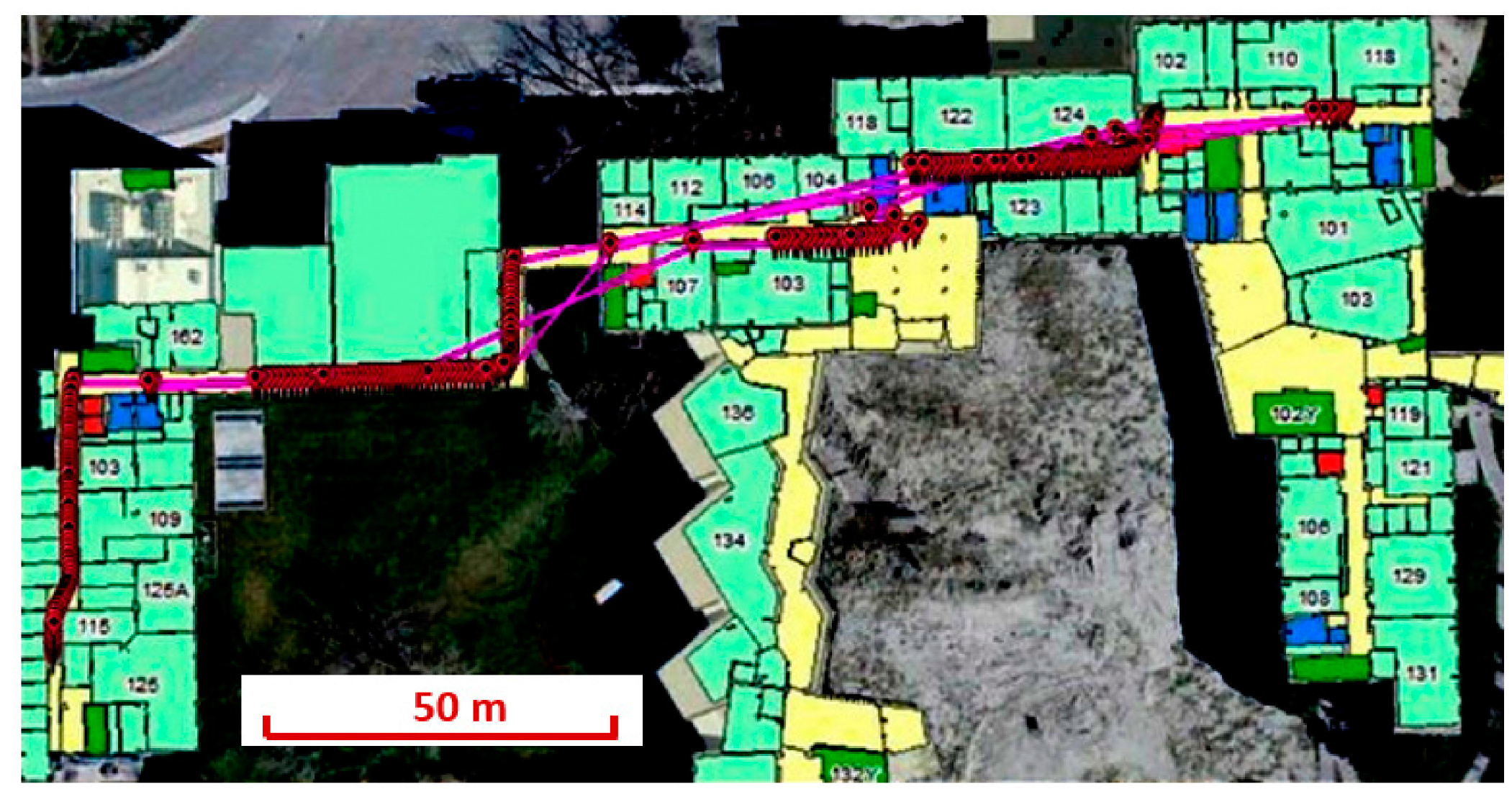
We generated the magnetic and WiFi DBs inside the EEEL building using four different trajectories. The true trajectories are shown in
Figure 4. Each trajectory lasted for 5–10 min. The coordinates of the landmarks (
i.e., the start and end points and corners and intersections) and the orientations of corridors were obtained from Google Earth and utilized as constraints to generate the DBs.
Figure 4.
Trajectories used to generate WiFi and magnetic databases (DBs) at the Energy Environment Experiential Learning (EEEL).
Figure 4.
Trajectories used to generate WiFi and magnetic databases (DBs) at the Energy Environment Experiential Learning (EEEL).
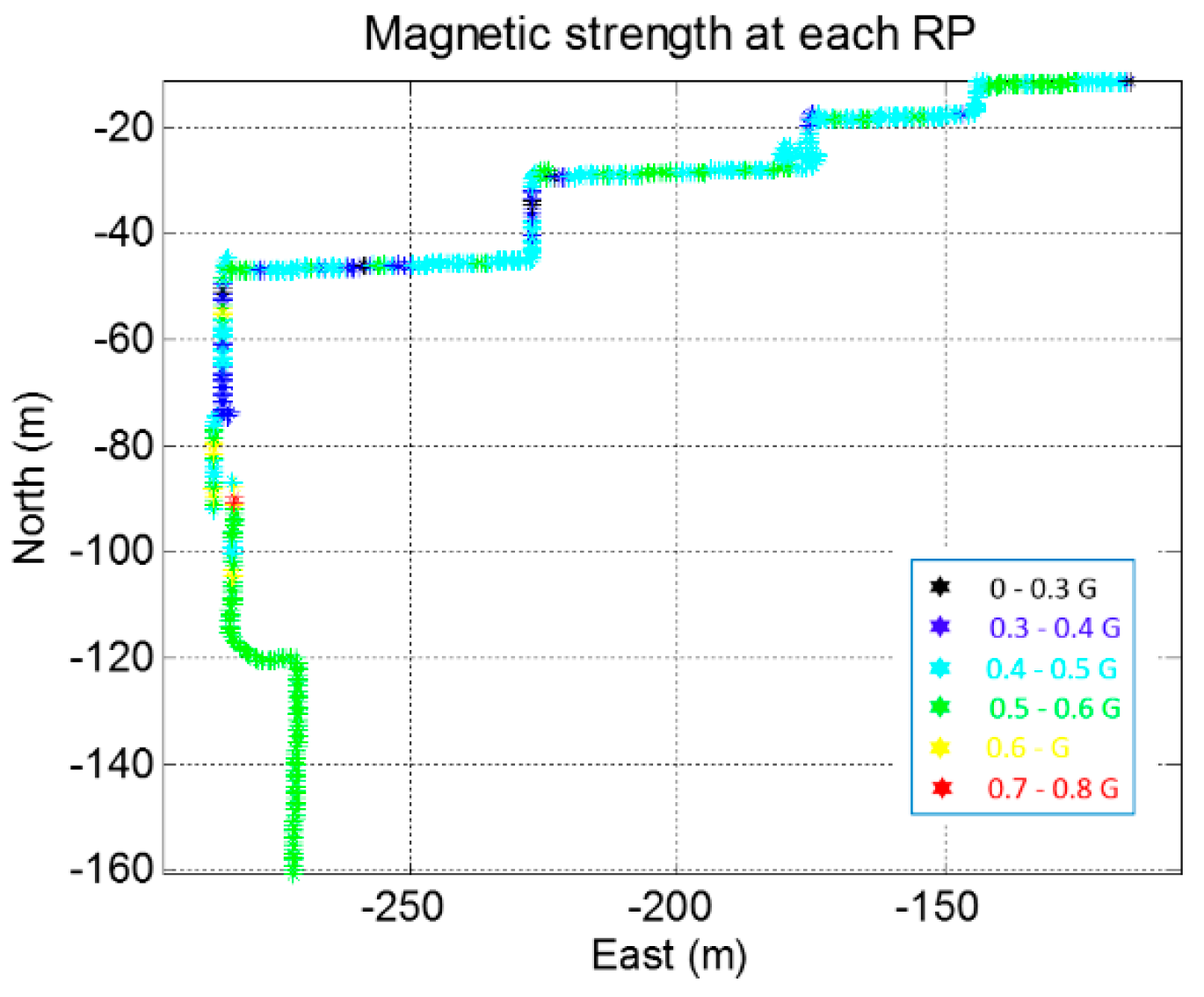
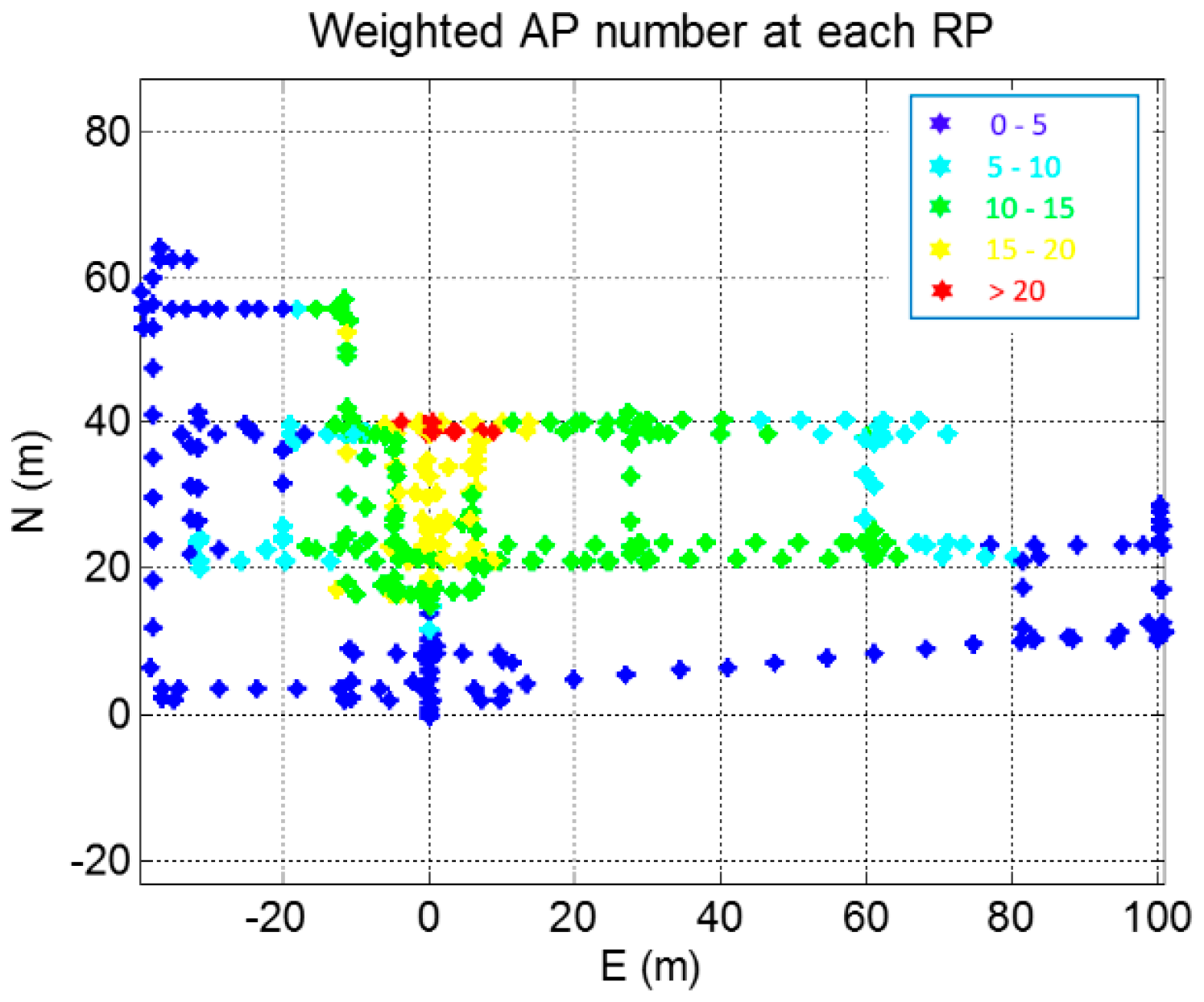
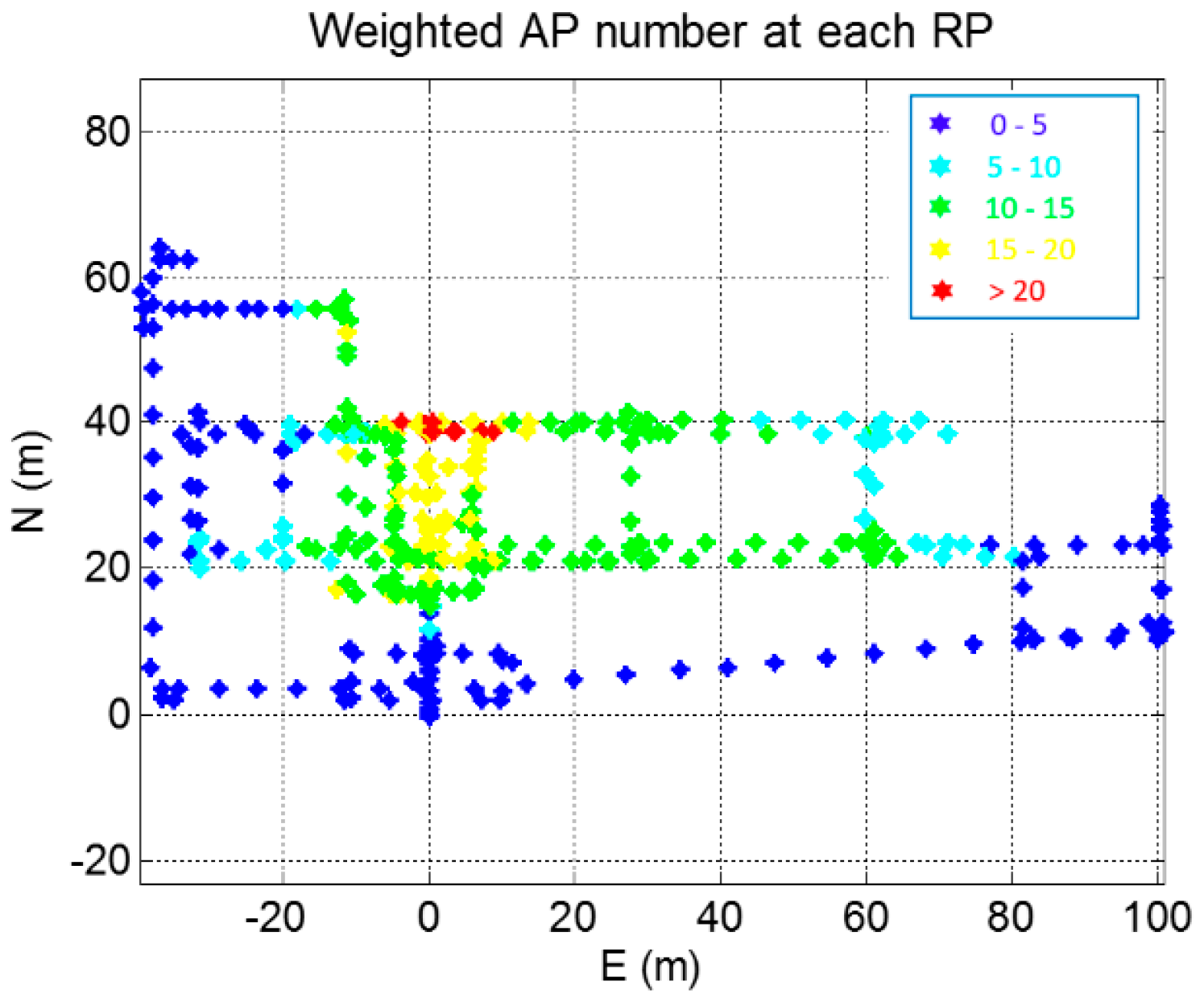
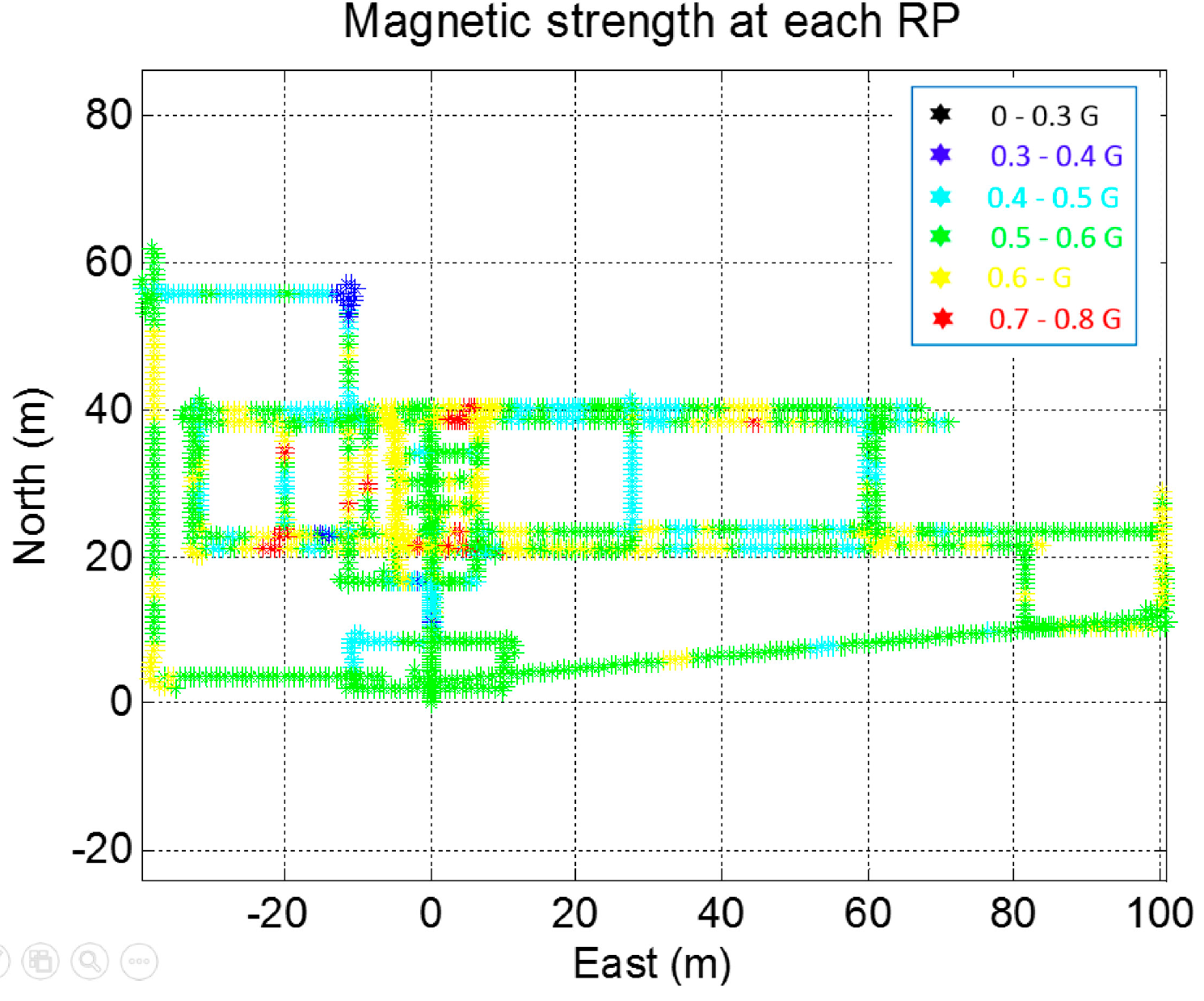
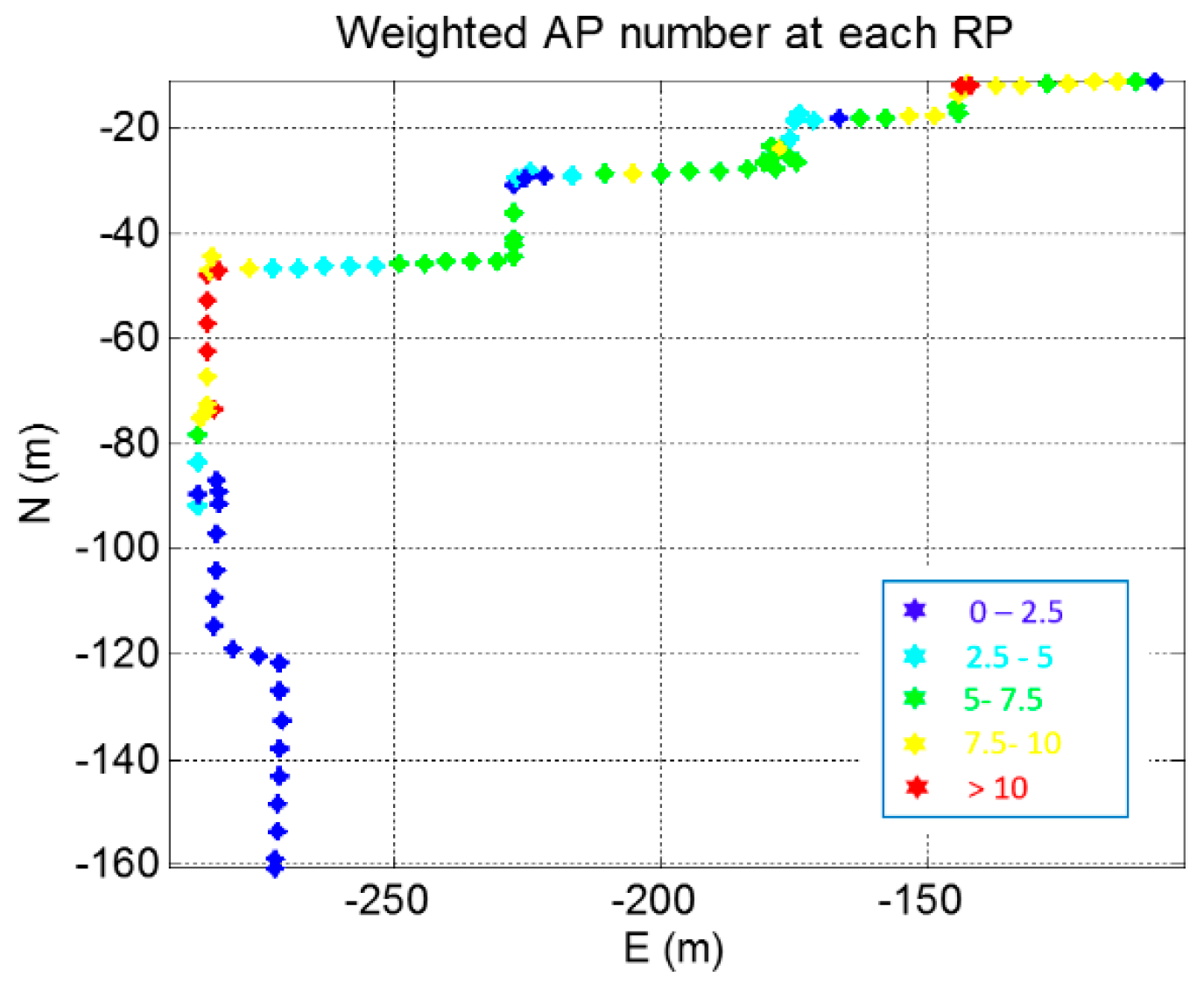
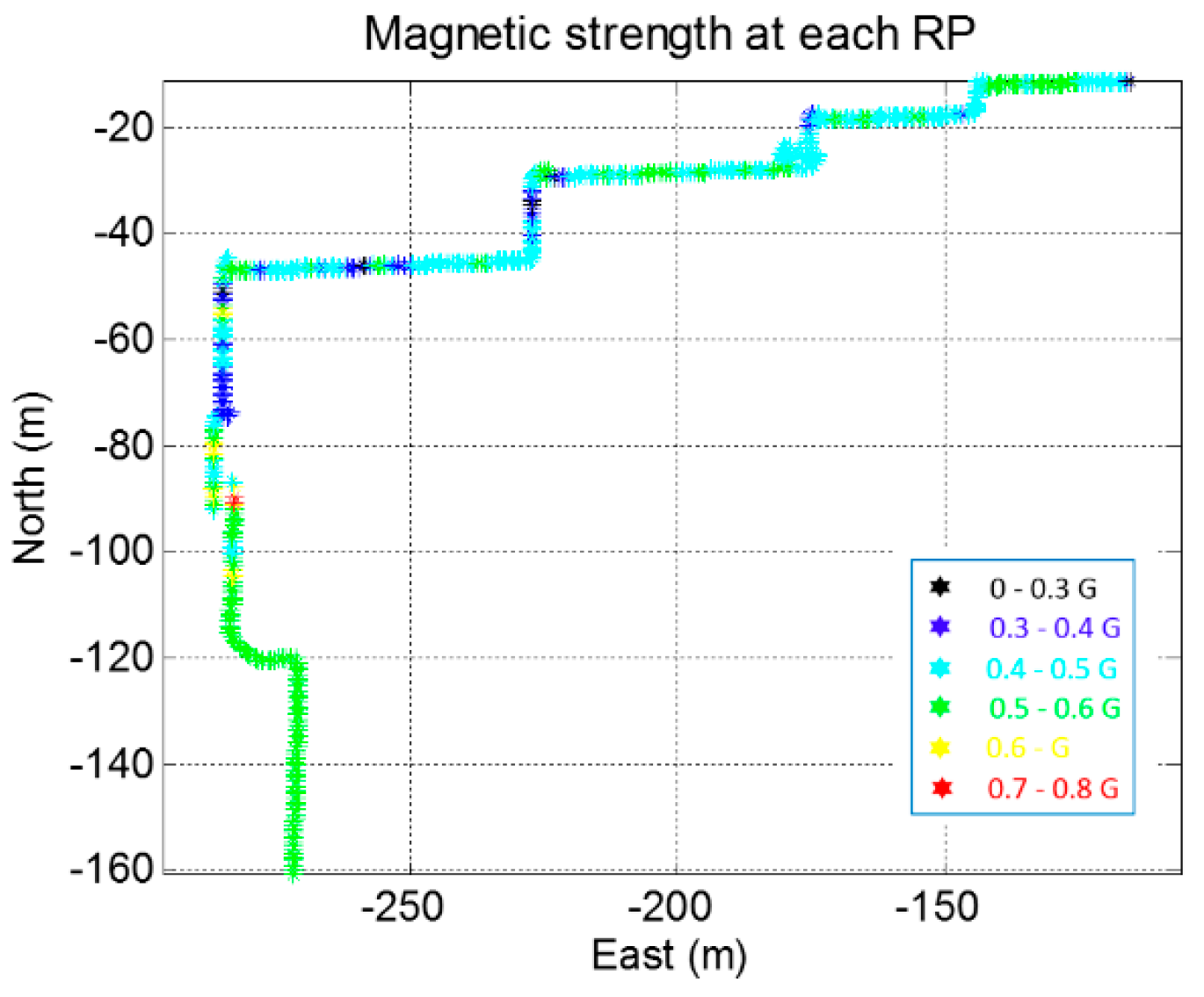
When the WiFi RSS information was updated, it was combined with the coordinate of the surveyor’s latest step as a fingerprint only. The WiFi update rate on tested smartphones was about 0.3 Hz; thus, the distance between two WiFi RPs was approximate 3 m. The RPs in the magnetic DB included all steps and interpolation points. The interpolation distance was set at 0.1 m. The scale factor α was set at 0.2. The RPs in the WiFi and magnetic DBs are shown in
Figure 5 and
Figure 6, respectively. The
x- and
y-axes indicate the length in the west–east and south–north directions. The colors in
Figure 5 and
Figure 6 indicate the weighted AP number and the magnetic strength. Over 15 RSS were available in the middle indoor area, and over 10 were available in the marginal indoor areas. The magnetic intensity varied from 0.3 Gauss to 0.8 Gauss indoors. The weighted AP number at
RPi was calculated by:
where
ni is the number of WiFi signals received at
RPi,
IRP is the location index set of RPs in the DB. The value of
ai,j is determine according to
RSSi,j (
i.e., the RSS of
APj at
RPi) by the following rule: If
RSSi,j > −60 dBm,
ai,j = 1; else, if −70 dBm <
RSSi,j < −60 dBm,
ai,j = 0.75; else, if −85 dBm <
RSSi,j < −70 dBm,
ai,j = 0.25; else, if
RSSi,j < −85 dBm,
ai,j =0.
Figure 5 shows that the available WiFi signals were abundant in the middle area of EEEL, less in the marginal indoor areas, and even less in outdoor areas.
Figure 6 indicates that the magnetic intensity was within 0.5–0.6 G (the geomagnetic intensity at Calgary is 0.57 G) at most of the outdoor RPs; however, the magnetic intensity varied significantly indoors.
Figure 5.
WiFi signal distribution at EEEL.
Figure 5.
WiFi signal distribution at EEEL.
Figure 6.
Magnetic distribution at EEEL.
Figure 6.
Magnetic distribution at EEEL.
3.1.2. Positioning Phase
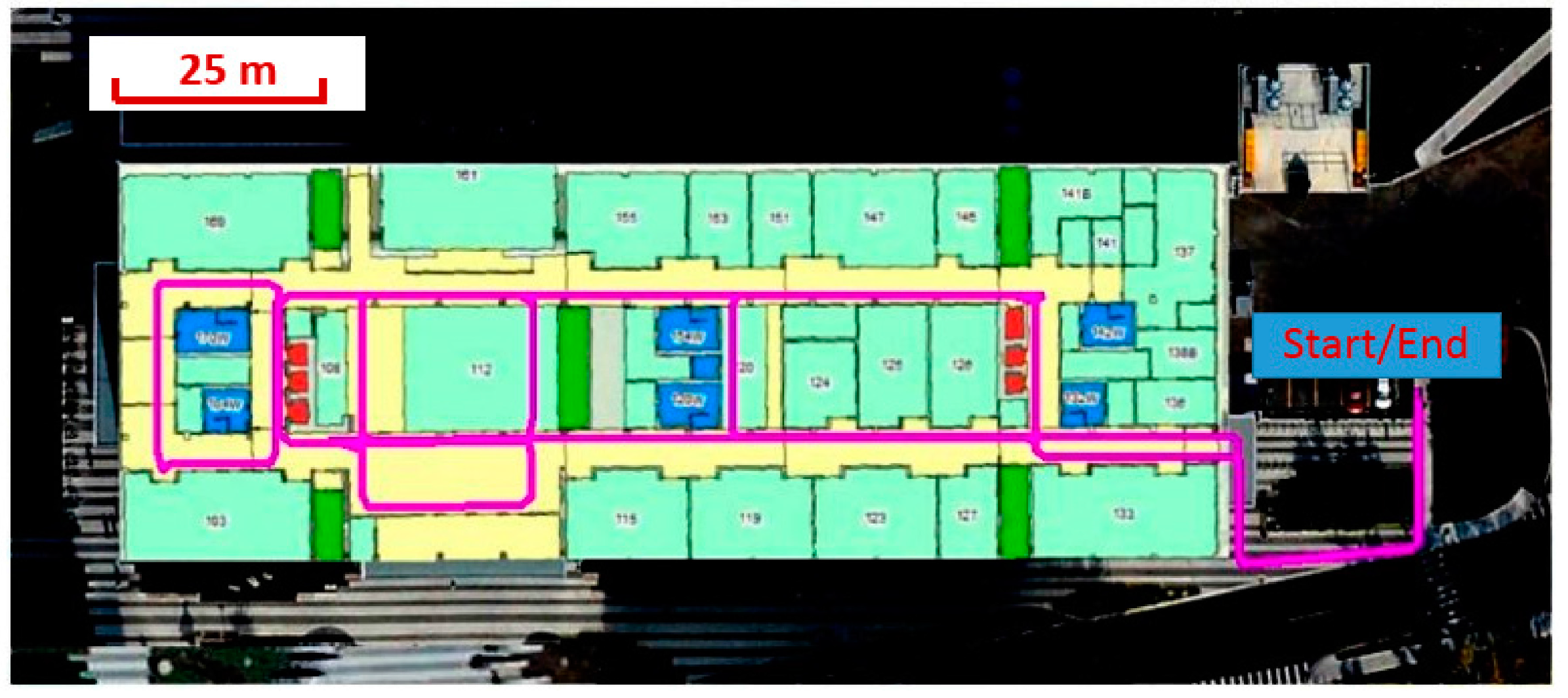
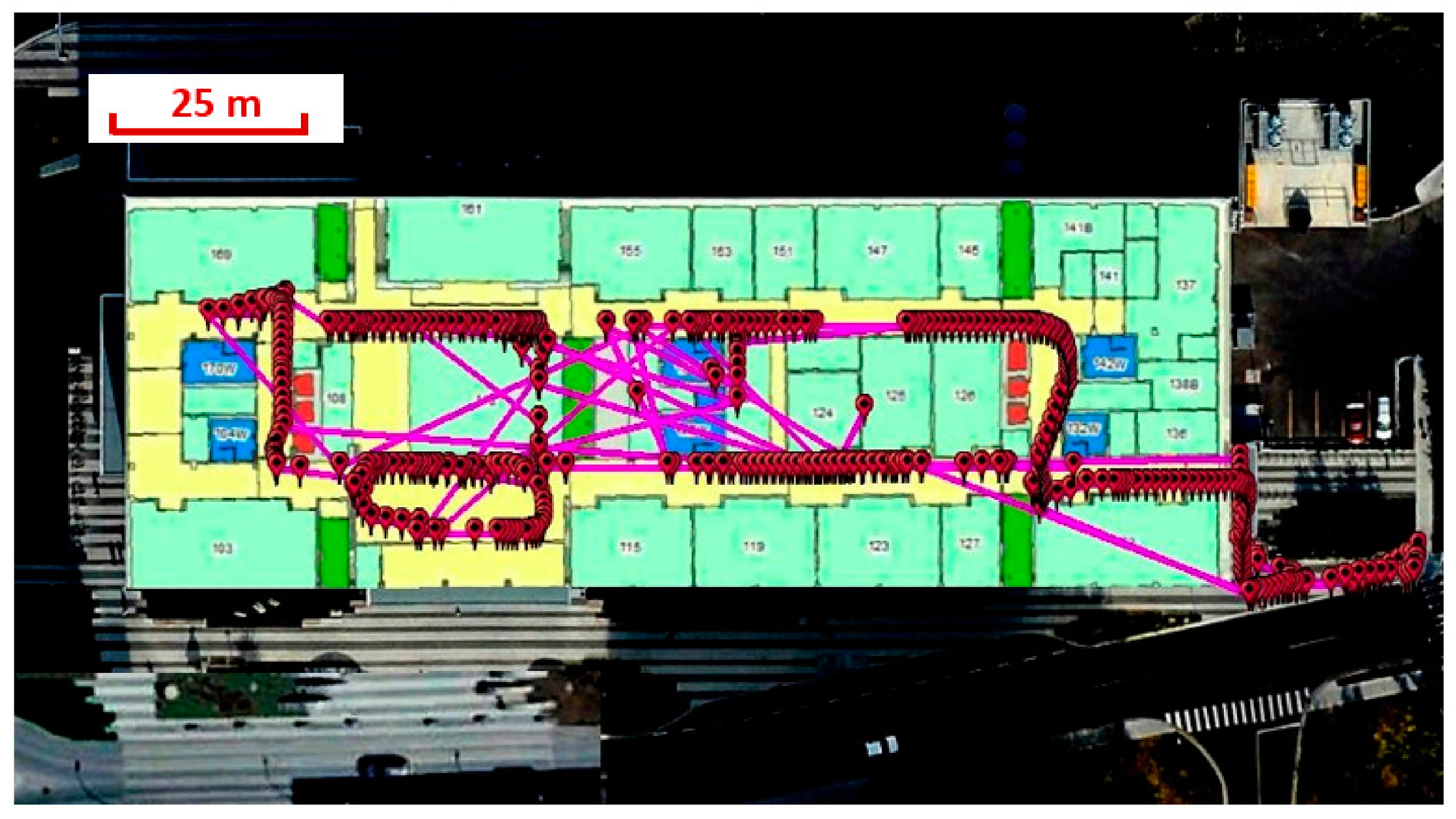
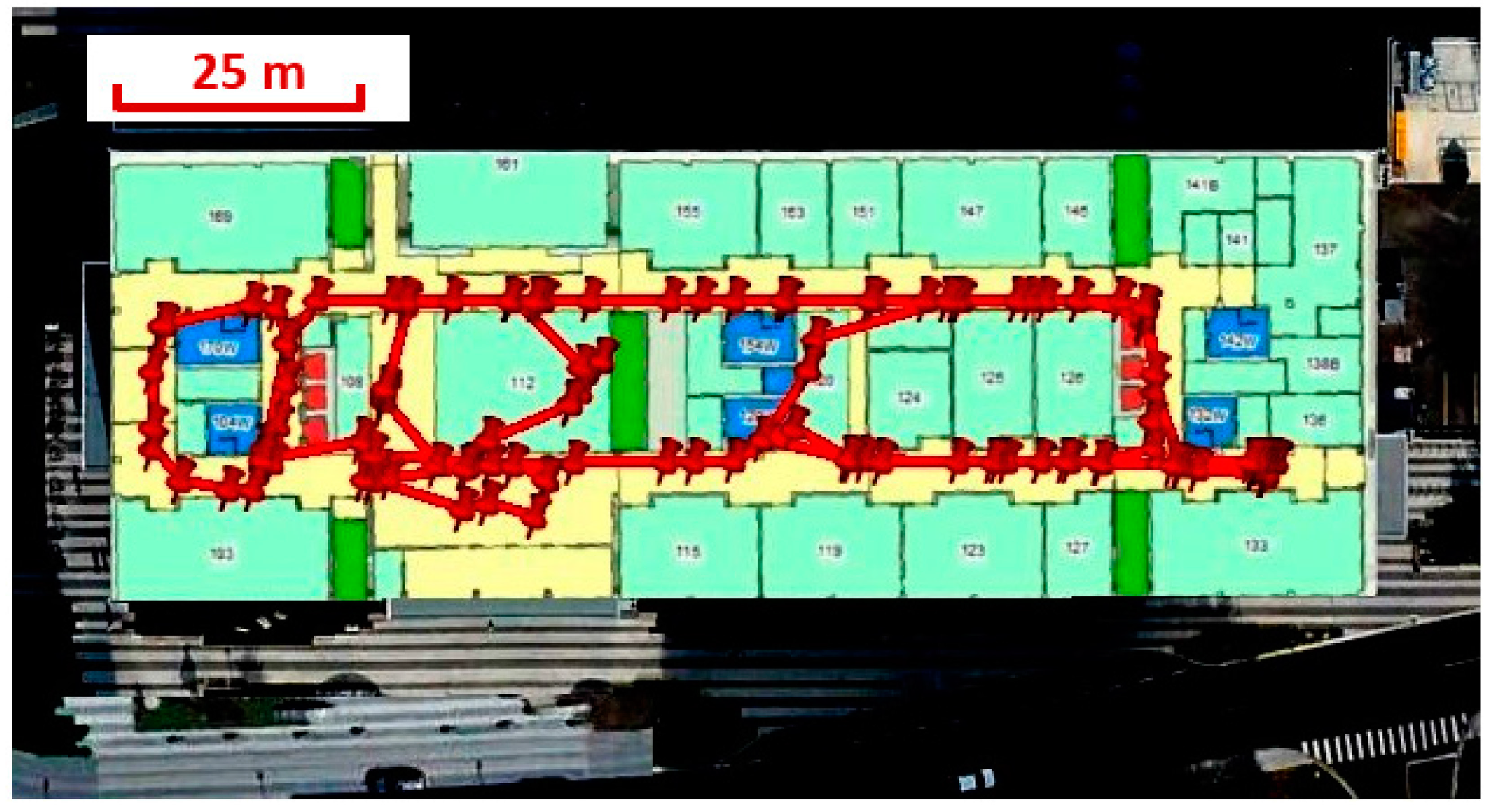
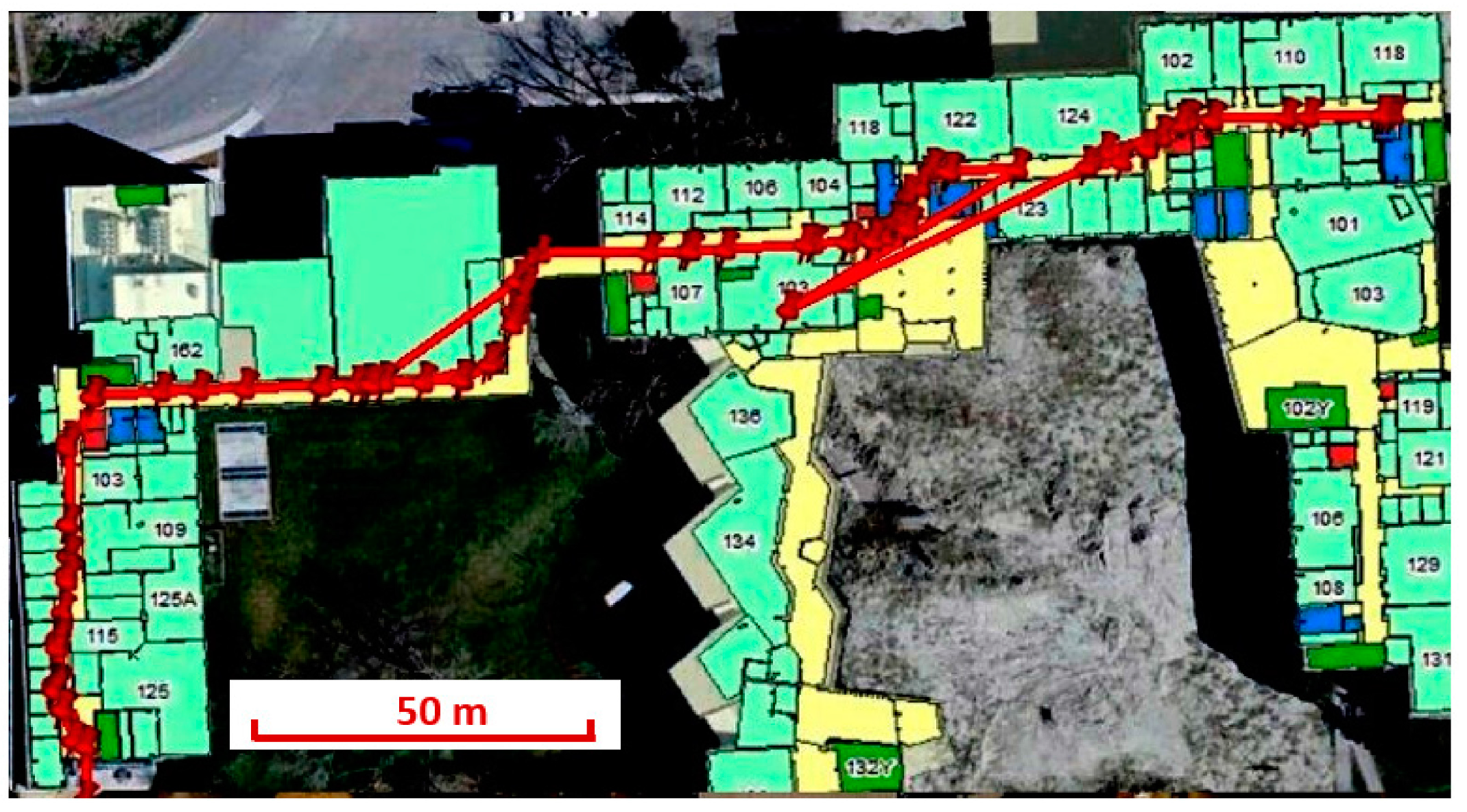
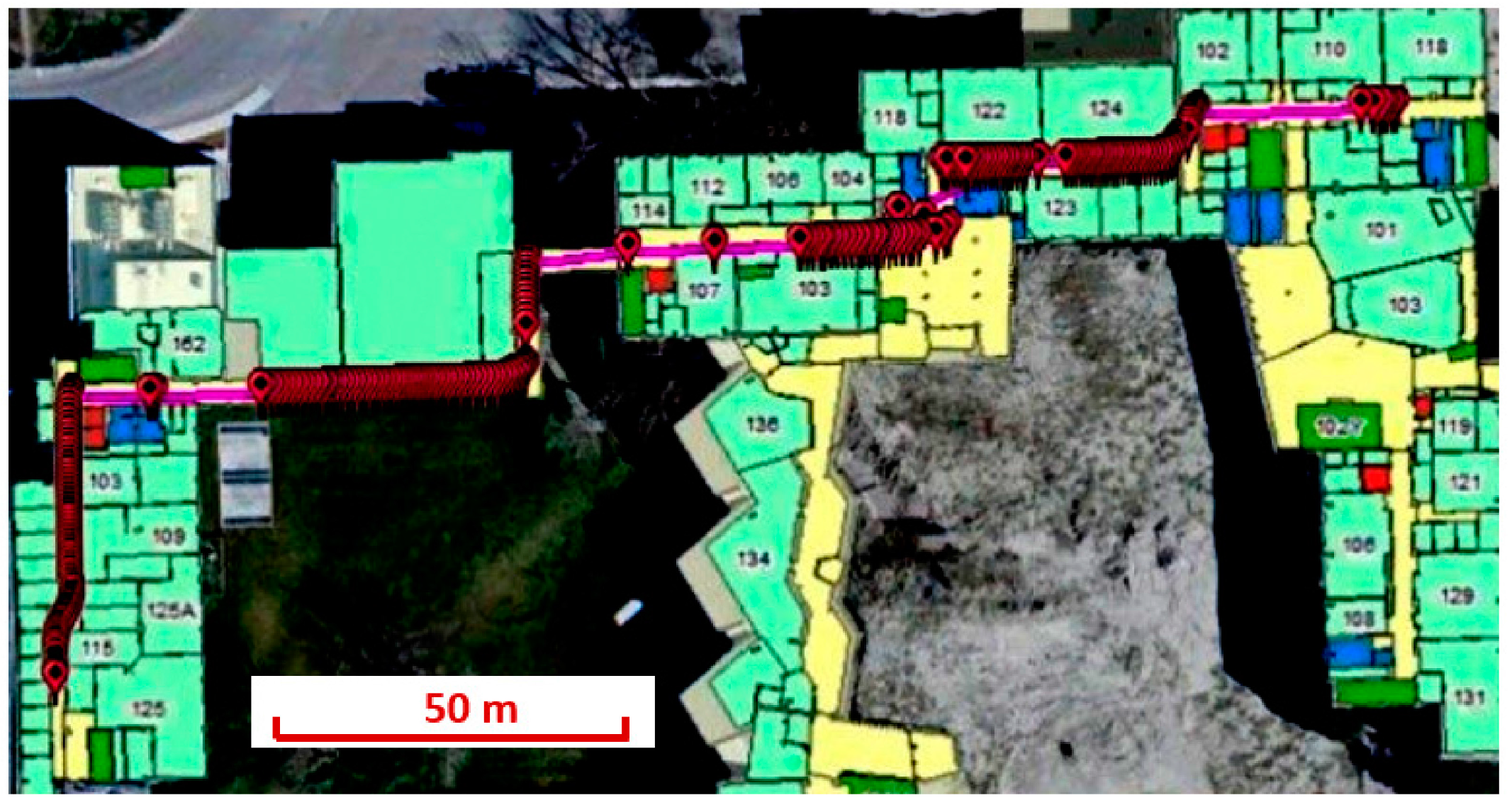
Figure 7 shows the trajectory for the positioning test, which was different from the training trajectories. The walking directions on the majority of the main corridors were also different from those on the training trajectories.
The threshold value for available WiFi RSS was set at ThRSS = −85 dBm. The number k was set at 4 for the k-NN approach. The profile length for MM was 10 steps: The MM process began after the user had walked for 10 steps; after this, the magnetic fingerprints within the latest 10 steps were used for matching. The radius of the MM search space determined by the WiFi results was set at R = 15 m. The test results are shown in the next subsection.
Figure 7.
Test trajectory at EEEL (with abundant WiFi and magnetic information).
Figure 7.
Test trajectory at EEEL (with abundant WiFi and magnetic information).
3.1.3. EEEL Test Results
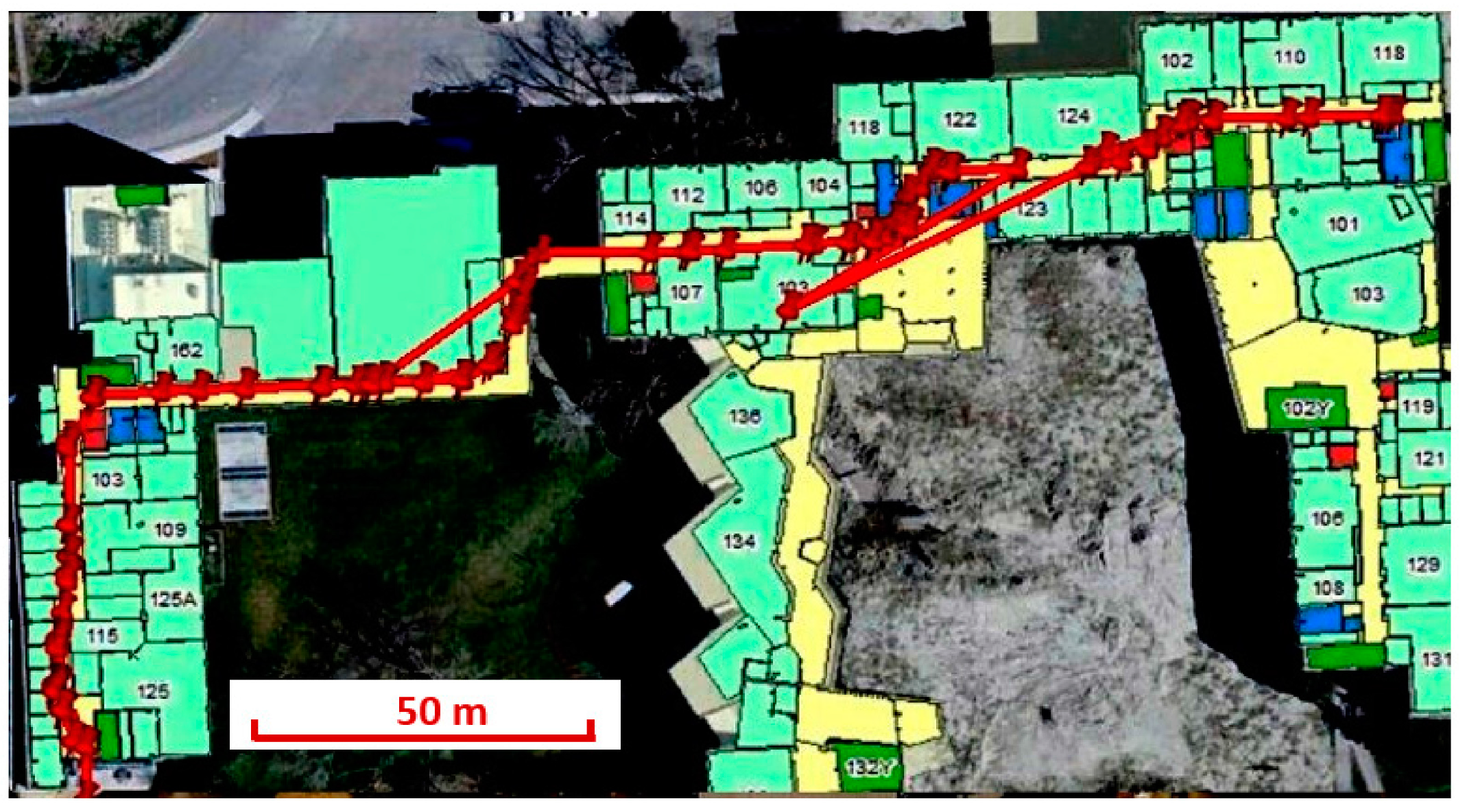
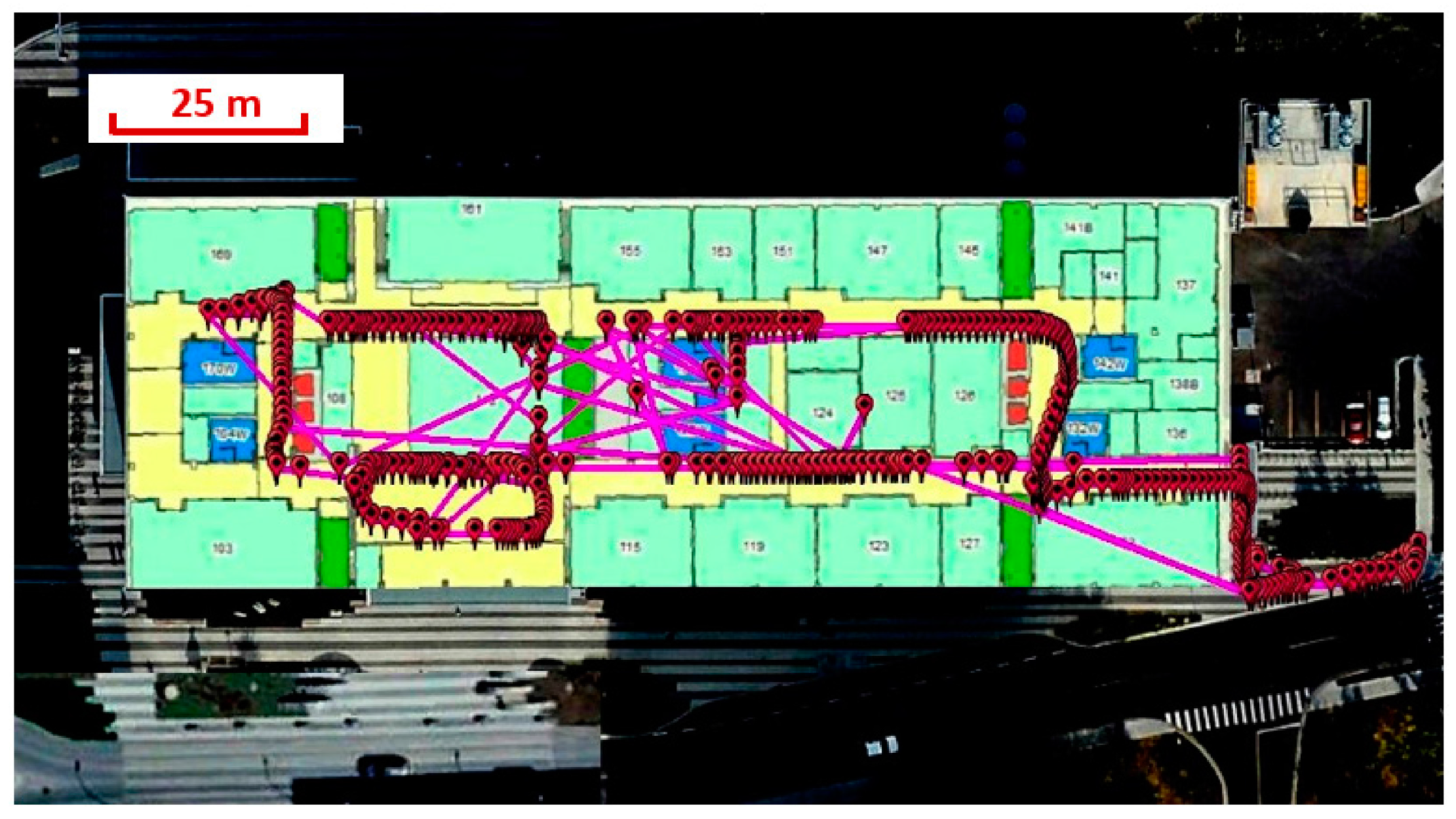
Navigation solutions with pedestrian dead-reckoning (PDR)-only, WiFi-only, MM-only, and WiFi-aided MM are shown in this subsection. We first trace the trajectory provided by each technology or combination. After this, statistical results are provided. The MM, WiFi, and WiFi-aided MM solutions are demonstrated in
Figure 8,
Figure 9 and
Figure 10, respectively.
WiFi provided absolute positions with a low mismatch rate in this test. As there were abundant WiFi APs in EEEL, the ambiguity issue was not evident. However, the WiFi results had significant fluctuations. RSS fluctuation is an issue inherent to any technology based on RSS.
Compared with WiFi, the matched MM results were more accurate and had smaller fluctuations. Nevertheless, MM had a significantly larger mismatch rate. Thus, it is preferable to use other technologies to aid MM and detect the mismatches.
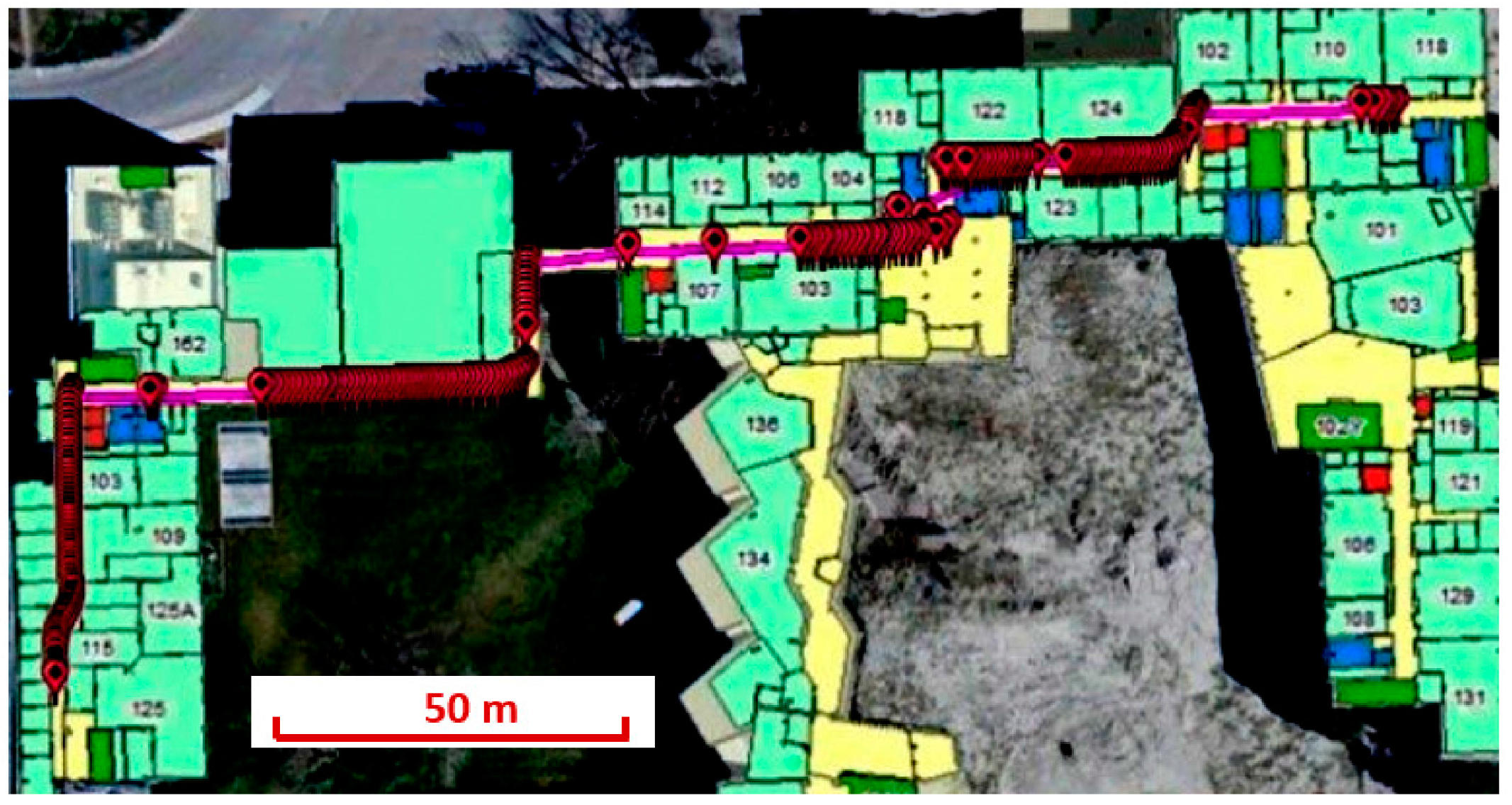
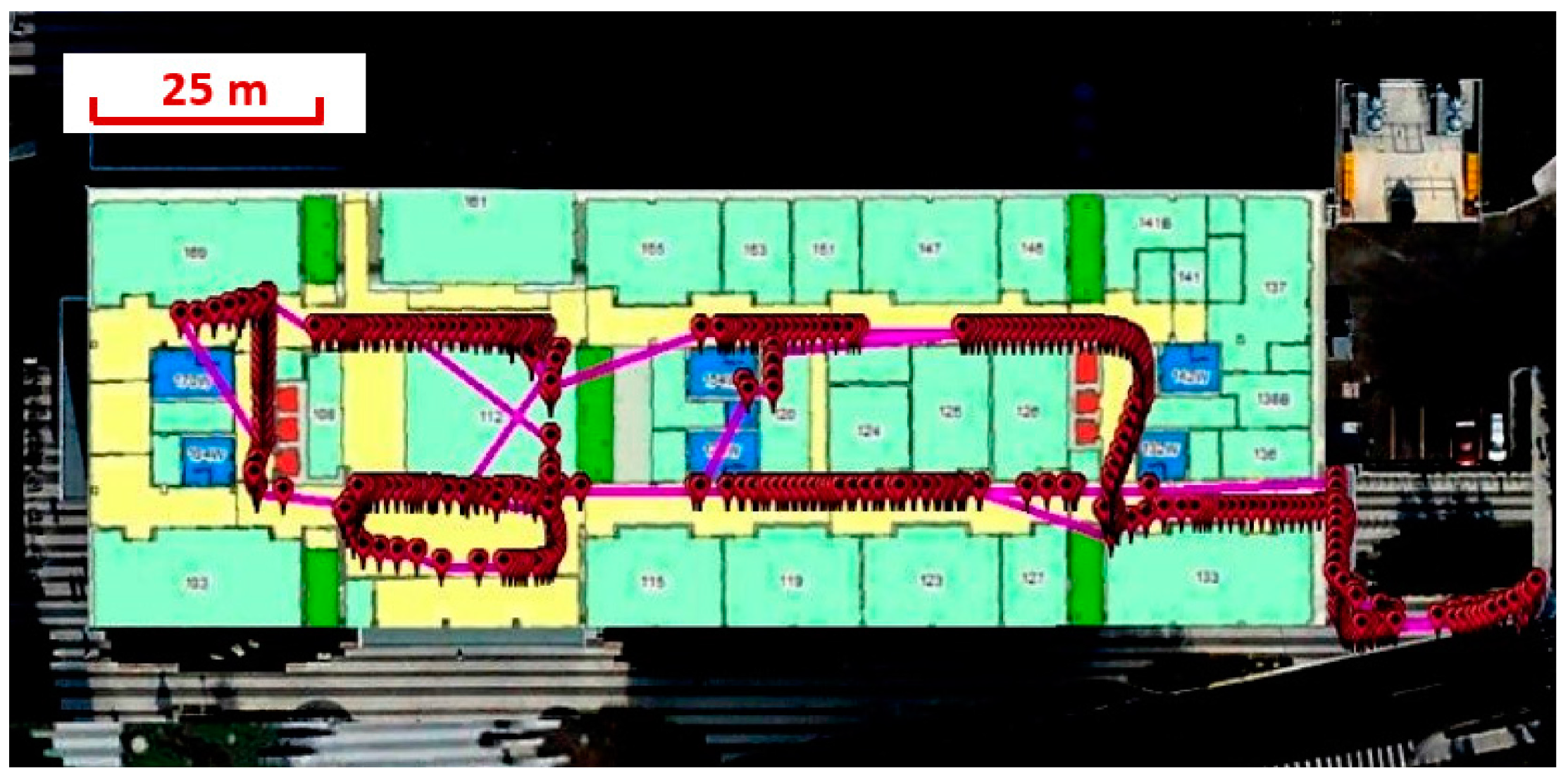
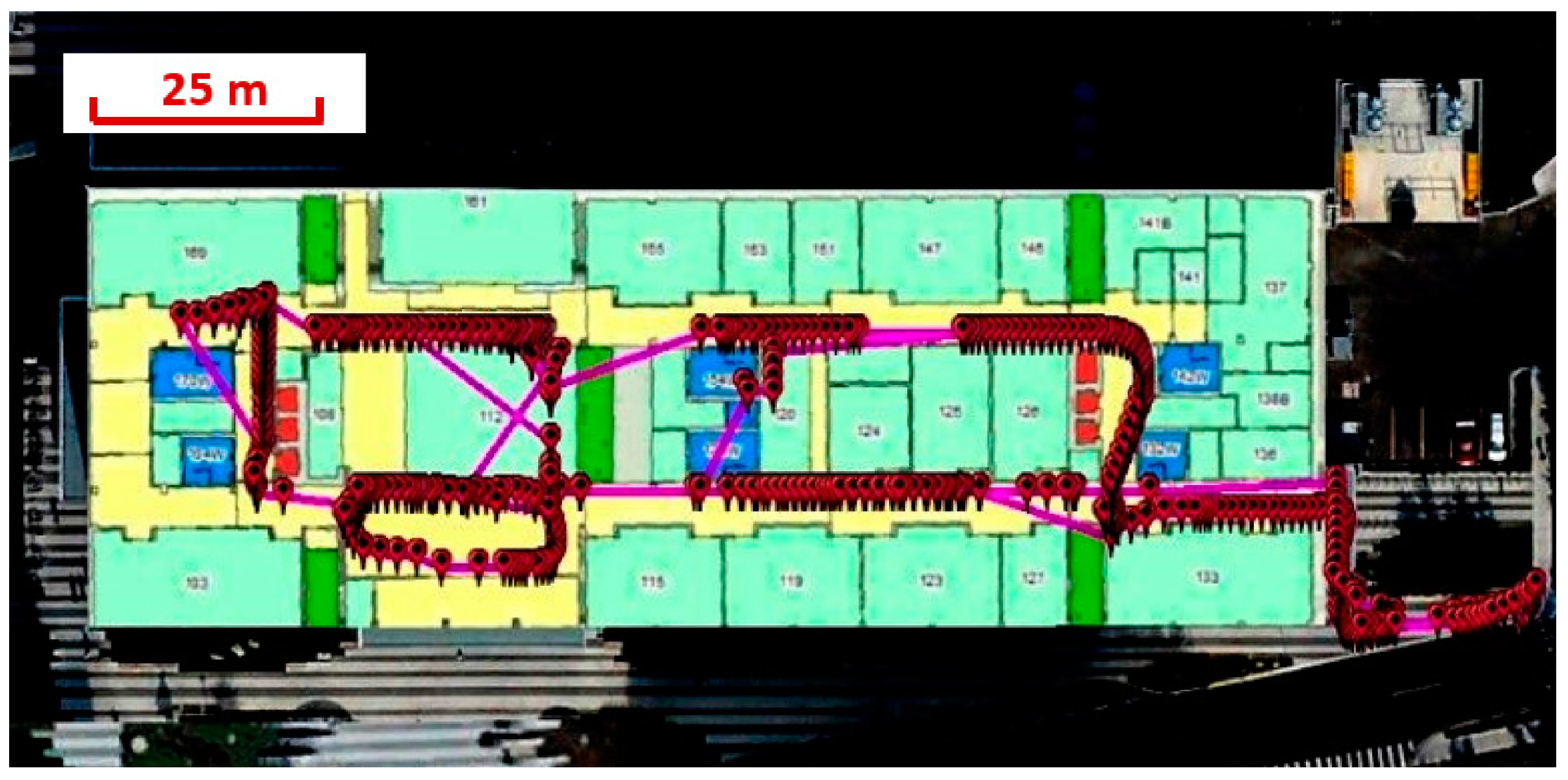
Figure 10 shows that the majority of the mismatches in MM were eliminated by limiting the search space using the WiFi results.
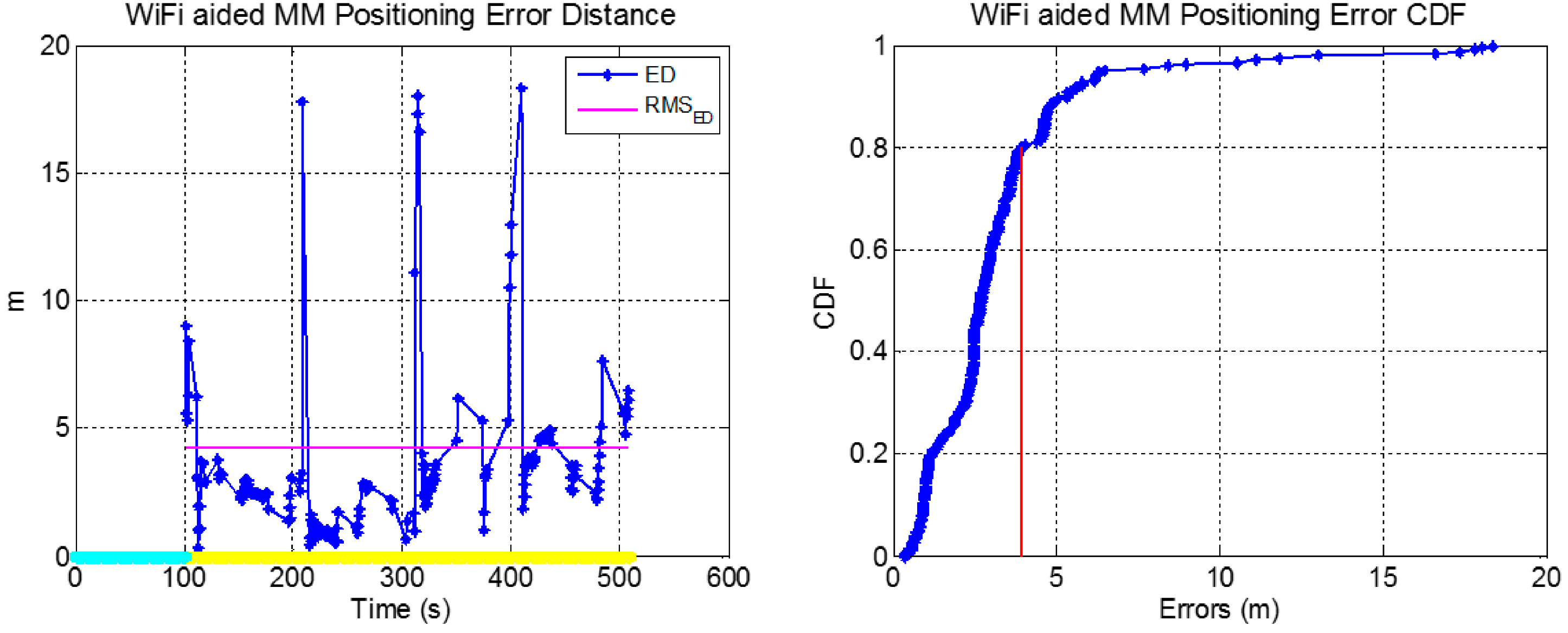
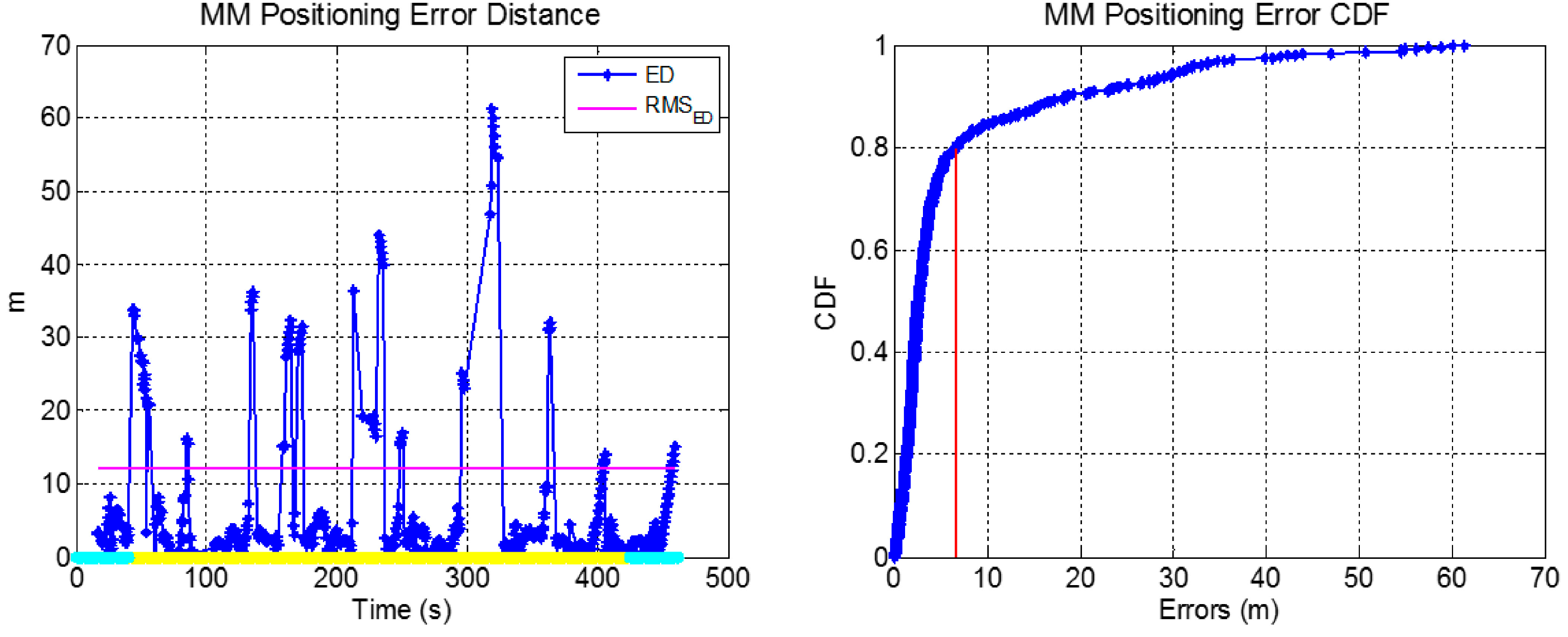
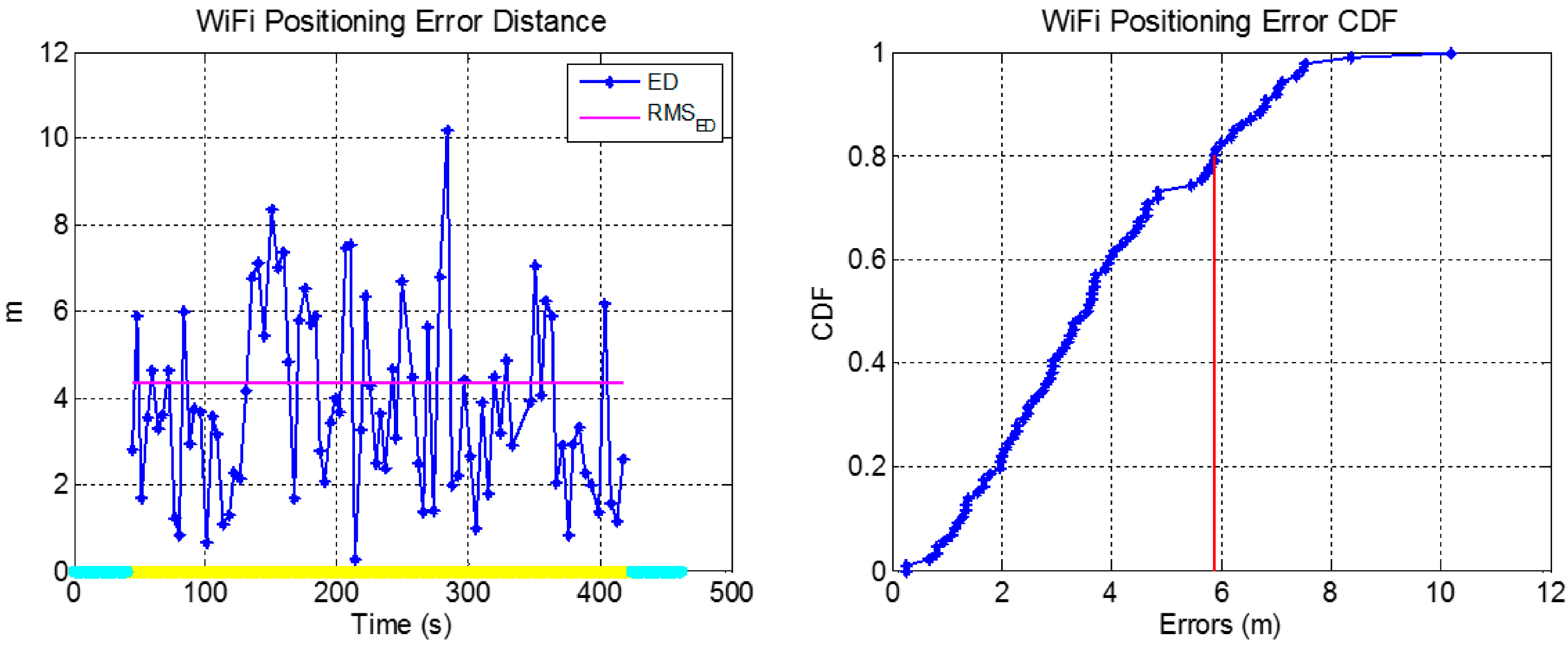
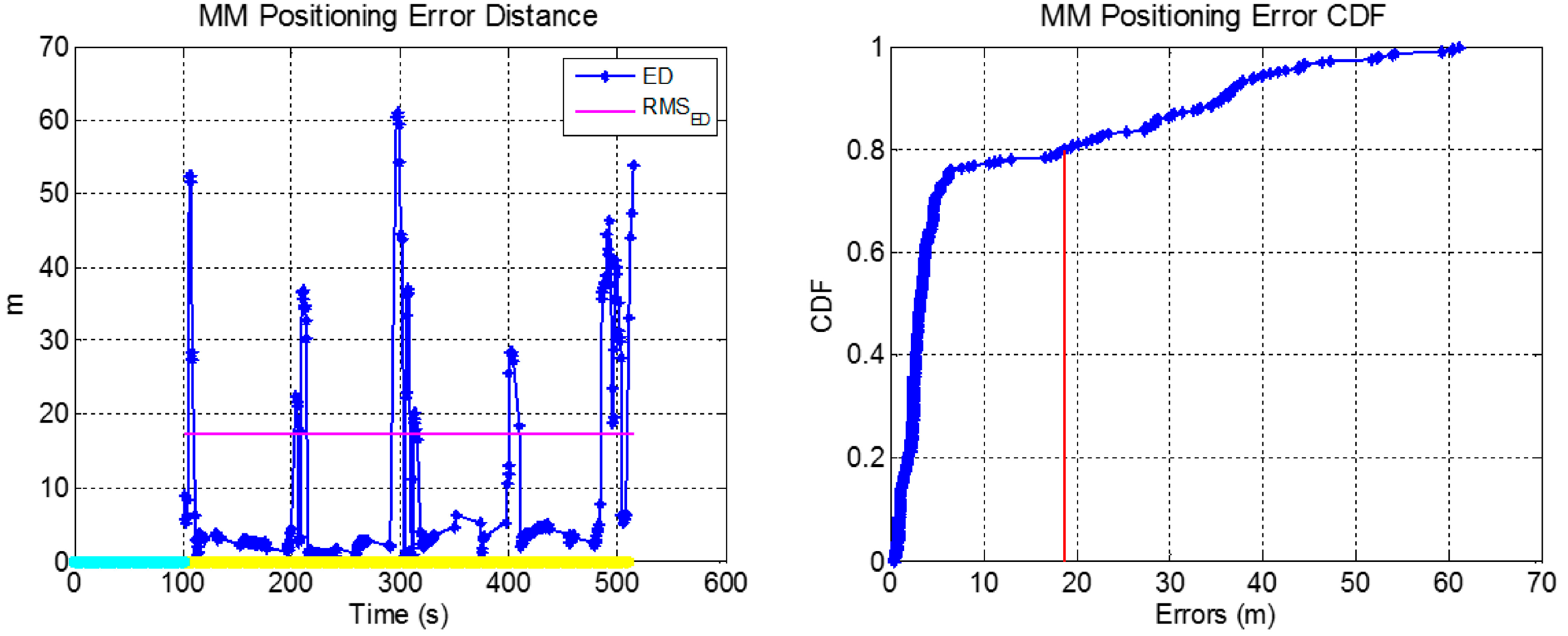
To further evaluate the positioning errors, the error distances (
i.e., the distance between the estimated user position and the corresponding true position) were calculated. The true positions were obtained by using the floor plan to correct the PDR solution, which was similar to the work in the training phase.
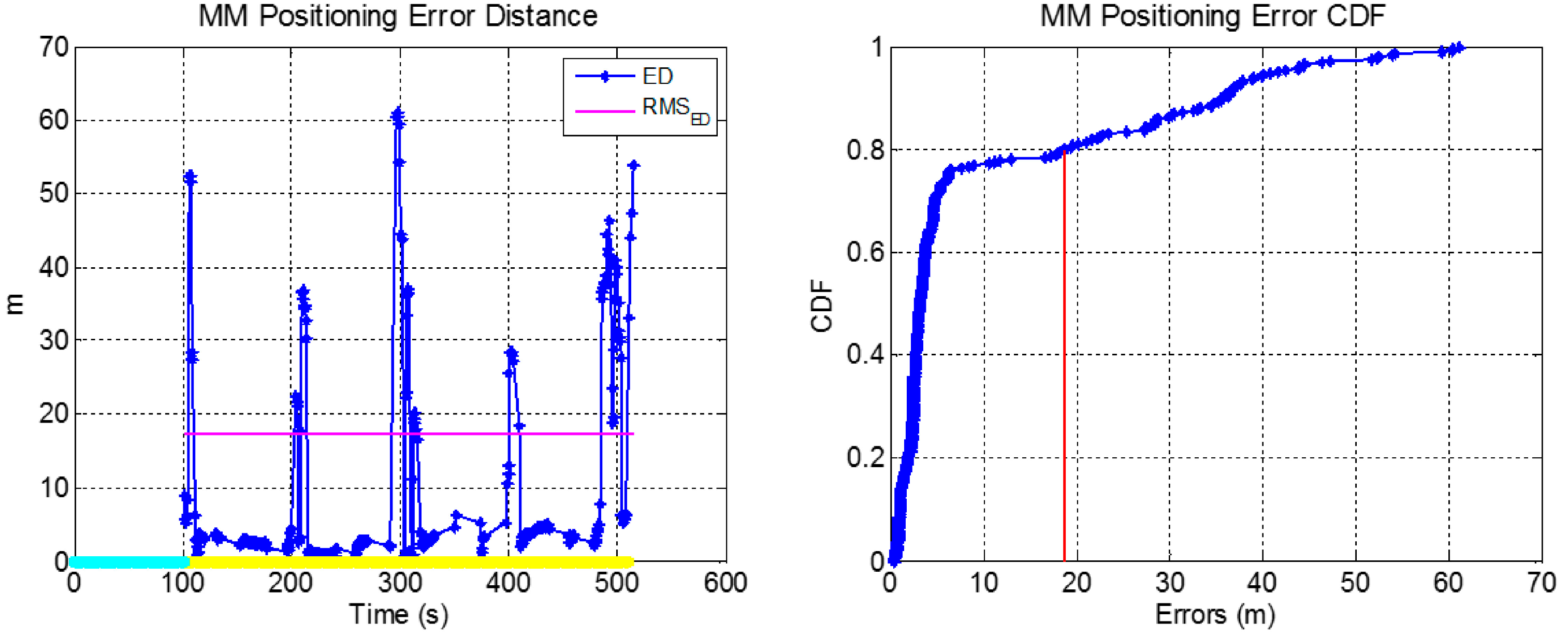
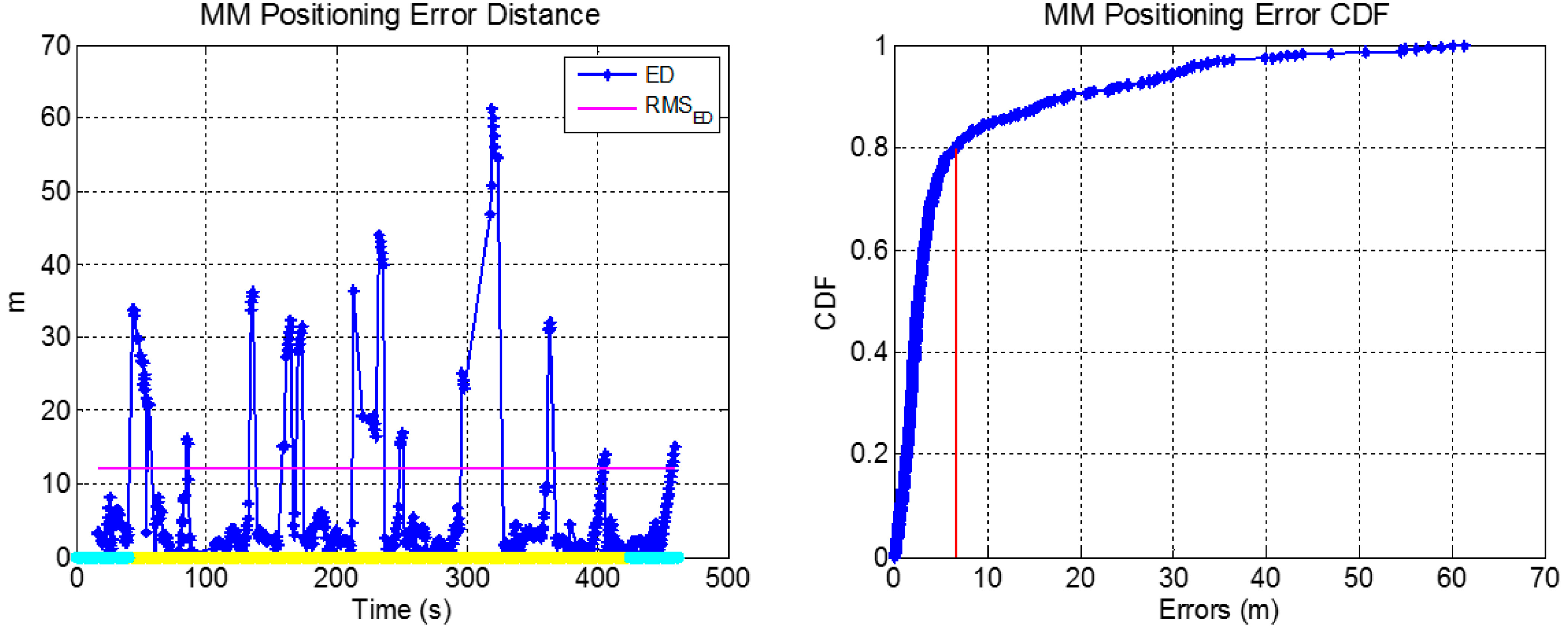
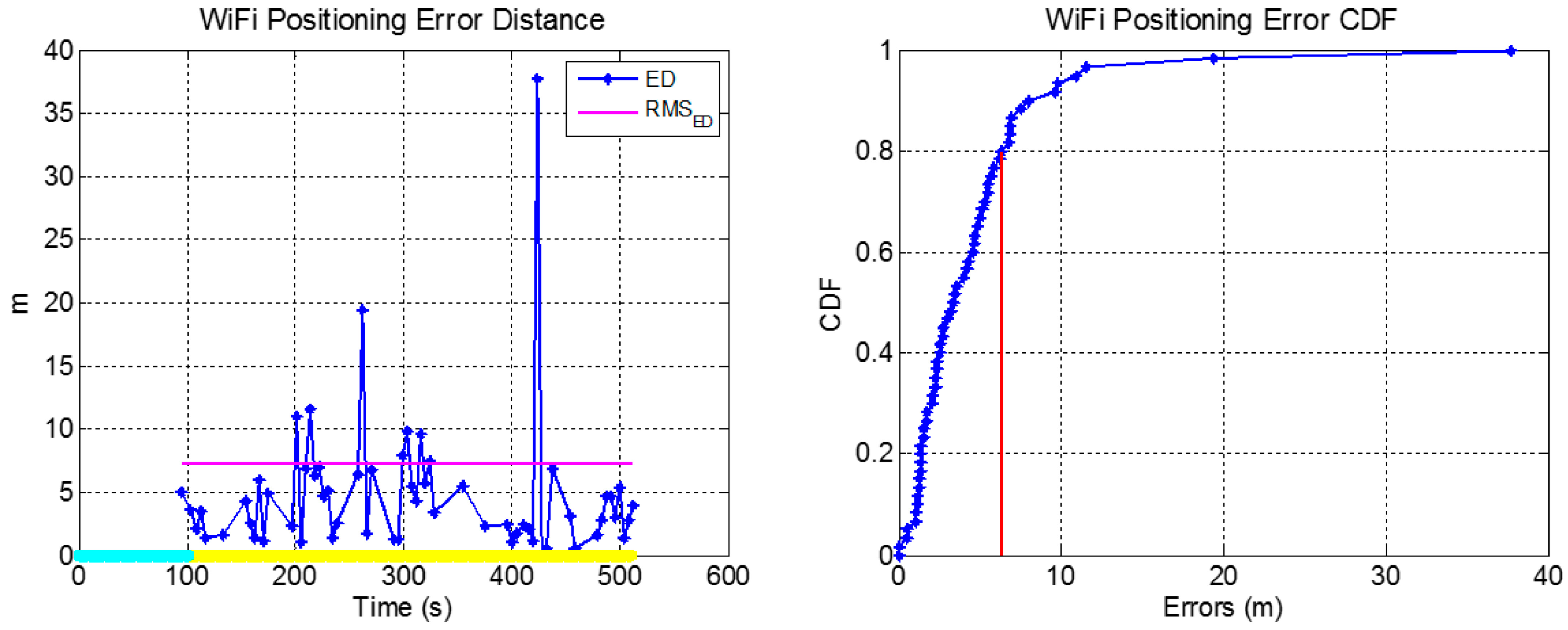
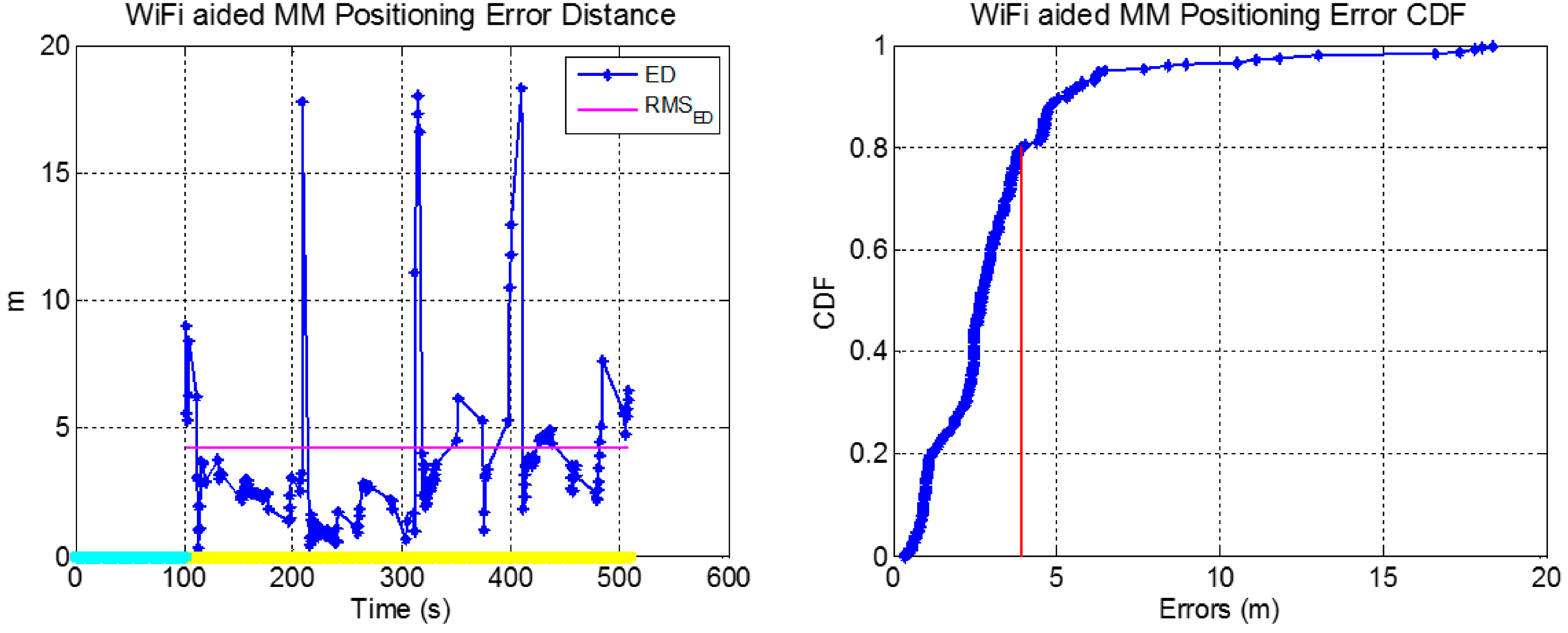
Figure 11,
Figure 12 and
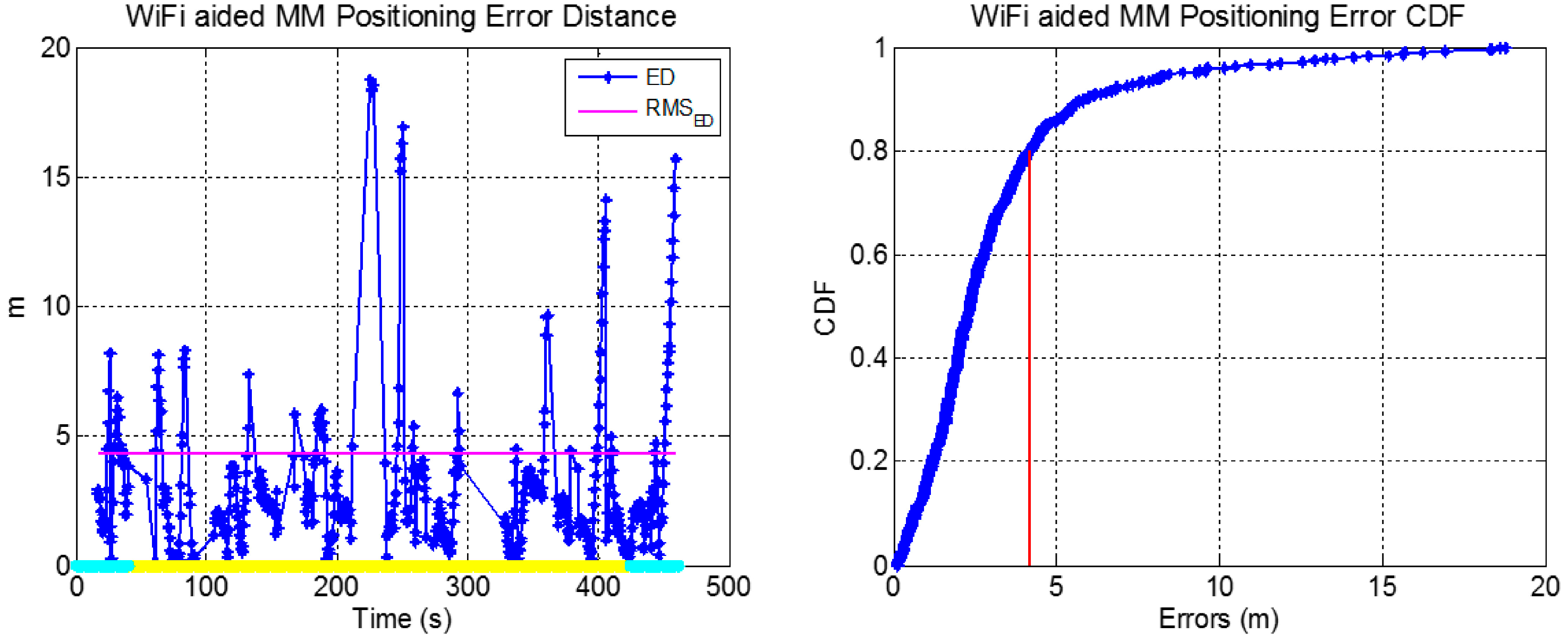
Figure 13 demonstrate the position errors of MM, WiFi, and WiFi-aided MM, respectively. The left plot in each figure shows the time series of error distances. The root mean square (RMS) value of the error distances is also shown as a magenta line. The yellow and blue lines on the
x-axis indicate indoors and outdoors, respectively. The right plot in each figure is the statistical error cumulative distribution function (CDF). The red line indicates the error within which the probability is 80%.
Figure 8.
Magnetic matching (MM) result at EEEL.
Figure 8.
Magnetic matching (MM) result at EEEL.
Figure 9.
WiFi fingerprinting result at EEEL.
Figure 9.
WiFi fingerprinting result at EEEL.
Figure 10.
WiFi-aided MM result at EEEL.
Figure 10.
WiFi-aided MM result at EEEL.
Figure 11.
MM position errors at EEEL.
Figure 11.
MM position errors at EEEL.
Figure 12.
WiFi position errors at EEEL.
Figure 12.
WiFi position errors at EEEL.
Figure 13.
WiFi-aided MM position errors at EEEL.
Figure 13.
WiFi-aided MM position errors at EEEL.
By using the WiFi solutions to limit the search space, the MM errors were reduced significantly. On several occasions, a sequence of MM results was more than 20 m away from the true positions. When aided by WiFi, these MM errors were controlled effectively. The max error reduced from more than 60 m to less than 20 m. Also, the 80% reduced from approximate 7 m to below 5 m.
Comparing with the WiFi-only results, the WiFi-aided MM results had a smaller 80% error. However, the max error of the WiFi-aided MM solution is larger than that in the WiFi results. The statistical values of navigation errors are shown in
Table 1. The first column shows the used technologies, and Column 2–4 are the max, RMS values, and errors within which the probability is 80%.
Table 1.
Statistical values of navigation errors at the Energy Environment Experiential Learning (EEEL).
Table 1.
Statistical values of navigation errors at the Energy Environment Experiential Learning (EEEL).
| Technique | Max (m) | RMS (m) | 80% (m) |
|---|
| WiFi | 10.2 | 4.3 | 5.8 |
| MM | 61.5 | 12.2 | 7.0 |
| WiFi-aided MM | 18.3 | 4.5 | 4.2 |
The RMS of WiFi positioning errors was 4.3 m. This was a medium accuracy for WiFi with consumer portable devices and with walk-survey. 80% of MM errors were within 7.0 m, but the RMS was 12.2 m. This is because there were several large mismatches. The RMS of MM errors was reduced to 4.5 m when using WiFi results to limit the search space.
Although the 80% error of WiFi-aided MM was 1.6 m less than that of WiFi, both the max error and the error RMS of the former were larger. This might due to the fact that WiFi results were already accurate (with a RMS of 4.3 m) because there were over 10 WiFi signals in most of the tested area at EEEL. This outcome indicates the performance improvement by combing WiFi and MM depends on signal distributions of both magnetic intensity and WiFi RSS. The following tests at ENB show the performance of the WiFi-aided MM algorithm when there were less WiFi signals.
3.2. Tests at ENB
The corridors in ENB are narrow and straight, which are different from those in EEEL. The RSS and magnetic distributions on the tested trajectory are shown in
Figure 14 and
Figure 15, respectively. The average number of RSS was approximately seven, and the change of magnetic intensity was below 0.25 Gauss. There were less WiFi APs and less magnetic perturbations at ENB. Therefore, it was expected that the WiFi and MM accuracy would probably be lower than that at EEEL.
Not only the MM results but also the WiFi results had several significant mismatches. This outcome met our expectation, as the WiFi signal distribution was poorer at ENB.
Figure 19,
Figure 20 and
Figure 21 demonstrate the position errors of MM, WiFi, and WiFi-aided MM, respectively. The left plot in each figure shows the time series of error distances. The root mean square (RMS) value of the error distances is also shown as a magenta line. The yellow and blue lines on the
x-axis indicate indoors and outdoors. The right plot in each figure is the statistical error cumulative distribution function (CDF). The red line indicates the error within which the probability is 80%.
Figure 14.
WiFi signal distribution at the Engineering building (ENB).
Figure 14.
WiFi signal distribution at the Engineering building (ENB).
Figure 15.
Magnetic distribution at ENB.
Figure 15.
Magnetic distribution at ENB.
Figure 16.
MM result at ENB.
Figure 16.
MM result at ENB.
Figure 17.
WiFi fingerprinting result at ENB.
Figure 17.
WiFi fingerprinting result at ENB.
Figure 18.
WiFi-aided MM result at ENB.
Figure 18.
WiFi-aided MM result at ENB.
Figure 19.
MM position errors at ENB.
Figure 19.
MM position errors at ENB.
Figure 20.
WiFi position errors at ENB.
Figure 20.
WiFi position errors at ENB.
Figure 21.
WiFi-aided MM position errors at ENB.
Figure 21.
WiFi-aided MM position errors at ENB.
The RMS of MM errors was 16.6 m at ENB, which was larger than that at EEEL (12.2 m). Also, the WiFi errors were more significant and had a max error of 35 m. Even with such large WiFi errors, the WiFi-aided MM results had a much smaller max error and RMS than both the WiFi and MM results. The statistics of navigation errors are shown in
Table 2.
Table 2.
Statistical values of navigation errors at ENB.
Table 2.
Statistical values of navigation errors at ENB.
| Technique | Max (m) | RMS (m) | 80% (m) |
|---|
| WiFi | 37.8 | 7.2 | 6.3 |
| MM | 61.0 | 16.6 | 17.3 |
| WiFi-aided MM | 17.8 | 4.2 | 4.0 |
In the ENB tests, MM provided the worst navigation solution with an RMS of 16.6 m. However, when aided by WiFi, the RMS reduced to 4.2 m. Therefore, although MM was not reliable, it could provide high accuracy when there was no mismatch. Therefore, it is feasible to combine MM with other technologies to provide accurate solutions. The key is to remove the MM mismatches using information from other technologies. When comparing the RMS value of the position errors for WiFi-aided MM with that for WiFi, an improvement of 41.6% was observed.
The WiFi and MM position errors at ENB (RMS 7.2 and 16.6 m, respectively) were more significant than those at EEEL (RMS 4.3 and 12.2 m, respectively). However, the position errors of WiFi-aided MM were similar for two buildings (RMS 4.5 m at EEEL and 4.2 m at ENB). This result indicates the potential of integrating WiFi and MM to provide more reliable navigation results, especially at the environments with poor WiFi RSS or magnetic intensity information. However,
Figure 21 demonstrates that there were still several errors that were larger than 15 m. This may probably due to the accuracy limit of both WiFi and MM in a short time period. Therefore, PDR, which provided accurate short-term solutions but suffers from increasing drifts, may be an appropriate candidate to integrate with the WiFi-aided approach. This will be an important issue in our future research.
4. Conclusions
This paper presents a WiFi-aided magnetic matching (MM) navigation algorithm that maximizes the advantage and minimizes the disadvantage of WiFi and MM. By using WiFi to reduce the MM search space, this algorithm can significantly reduce the mismatching rate and computational load of MM. The algorithms were tested with smartphones in different indoor environments (i.e., Environment #1 with abundant WiFi APs and significant magnetic changes, and Environment #2 with less WiFi and magnetic information).
The WiFi and MM databases were generated simultaneously within half an hour using the walk-survey method. WiFi fingerprinting errors were not significant in Environment #1 (RMS 4.3 m and max 10.2 m) but significant in Environment #2 (RMS 7.2 m and max 37.8 m). In general, WiFi results had a low mismatch rate in both environments.
MM had significant mismatch rates. The RMS values of MM errors reached 12.2 m (Environment #1) and 16.6 m (Environment #2). However, when we used WiFi to limit the MM search space, the RMS reduced to below 4.5 m. Therefore, the key to obtaining accurate MM solutions is to remove the mismatches using information from other technologies.
WiFi-aided MM provided more reliable results than MM, which indicates the effectiveness of introducing the WiFi information. Comparing with WiFi-only results, the WiFi-aided MM solution was similar in Environment #1 but approximately 41.6% better in Environment #2. This outcome demonstrates that integrating WiFi and MM can also enhance the WiFi fingerprinting results in environments with poor WiFi signal distributions.
The proposed WiFi-aided magnetic matching algorithm uses off-the-shelf sensors available in consumer portable devices and existing WiFi infrastructure, which need no additional hardware cost or extra manpower cost. Future work will focus on introducing other technologies, such as PDR, to integrate with the WiFi-aided approach and provide continuous and reliable solutions.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}