
Adaptive Unscented Kalman Filter for Target Tracking in the Presence of Nonlinear Systems Involving Model Mismatches


Abstract
:
1. Introduction
2. Problem Description
2.1. System Model Formulation for Target Tracking
2.2. Standard UKF
2.3. Problem Description of the Filter for Systems Involving Model Mismatches
3. Adaptive UKF Algorithm
3.1. L-AUKF Algorithm
3.2. N-AUKF Algorithm
3.3. Filtering Divergence Suppression of the N-AUKF Algorithm
3.4. Implementation Steps of N-AUKF Algorithm
4. Experimental Results and Discussion
4.1. Simulation Cases
4.2. Simulation Results
4.3. Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Matveev, A.S.; Semakova, A.A.; Savkin, A.V. Tight circumnavigation of multiple moving targets based on a new method of tracking environmental boundaries. Automatica 2017, 79, 52–60. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, G.; Yan, D.; Zhao, Z. Two Algorithms for the Detection and Tracking of Moving Vehicle Targets in Aerial Infrared Image Sequences. Remote Sens. 2016, 8, 28. [Google Scholar] [CrossRef]
- Leven, W.F.; Lanterman, A.D. Unscented Kalman Filters for Multiple Target Tracking With Symmetric Measurement Equations. IEEE Trans. Autom. Control 2009, 54, 370–375. [Google Scholar] [CrossRef]
- Song, Y.; Zhang, B.; Zhao, K. Indirect neuroadaptive control of unknown MIMO systems tracking uncertain target under sensor failures. Automatica 2017, 77, 103–111. [Google Scholar] [CrossRef]
- Wu, J.; Li, K.; Zhang, Q.; An, W.; Jiang, Y.; Ping, X.; Chen, P. Iterative RANSAC based adaptive birth intensity estimation in GM-PHD filter for multi-target tracking. Signal Process. 2017, 131, 412–421. [Google Scholar] [CrossRef]
- Roy, A.; Mitra, D. Unscented-Kalman-Filter-Based Multitarget Tracking Algorithms for Airborne Surveillance Application. J. Guid. Control Dyn. 2016, 39, 1949–1966. [Google Scholar] [CrossRef]
- Kalman, R.E. A New Approach to Linear Filtering and Prediction Problems. J. Fluids Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Belik, B.V.; Belov, S.G. Using of Extended Kalman Filter for Mobile Target Tracking in the Passive Air Based Radar System. Proc. Comput. Sci. 2017, 103, 280–286. [Google Scholar] [CrossRef]
- Moussakhani, B.; Flam, J.T.; Ramstad, T.A.; Balasingham, I. On change detection in a Kalman filter based tracking problem. Signal Process. 2014, 105, 268–276. [Google Scholar] [CrossRef]
- Zahedi Ygane, M.H.; Ansarifar, G.R. Extended Kalman filter design to estimate the poisons concentrations in the P.W.R nuclear reactors based on the reactor power measurement. Ann. Nucl. Energy 2017, 101, 576–585. [Google Scholar] [CrossRef]
- Kulikova, M.V.; Kulikov, G.Y. NIRK-based accurate continuous–Discrete extended Kalman filters for estimating continuous-time stochastic target tracking models. J. Comput. Appl. Math. 2017, 316, 260–270. [Google Scholar] [CrossRef]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F.M. Novel approach to nonlinear and non-Gaussian Bayesian state estimation. IEE Proc. F Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef]
- Zhou, H.; Deng, Z.; Xia, Y.; Fu, M. A new sampling method in particle filter based on Pearson correlation coefficient. Neurocomputing 2016, 216, 208–215. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new approach for filtering nonlinear systems. In Proceedings of the American Control Conference, Seattle, WA, USA, 21–23 June 1995; pp. 1628–1632. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K.; Durrant-Whyte, H.F. A new method for nonlinear transformation of means and covariances in filters and estimators. IEEE Trans. Autom. Control. 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Boada, B.L.; Boada, M.J.L.; Diaz, V. Vehicle sideslip angle measurement based on sensor data fusion using an integrated ANFIS and an Unscented Kalman Filter algorithm. Mech. Syst. Signal Process. 2016, 72–73, 832–845. [Google Scholar] [CrossRef]
- Wang, D.; Lv, H.; Wu, J. In-flight initial alignment for small UAV MEMS-based navigation via adaptive unscented Kalman filtering approach. Aerosp. Sci. Technol. 2017, 61, 73–84. [Google Scholar] [CrossRef]
- Kumar, D.V.A.N.R.; Rao, S.K.; Raju, K.P. Integrated Unscented Kalman filter for underwater passive target tracking with towed array measurements. Optik-Int. J. Light Elec. Opt. 2016, 127, 2840–2847. [Google Scholar] [CrossRef]
- Rahimi, A.; Kumar, K.D.; Alighanbari, H. Fault estimation of satellite reaction wheels using covariance based adaptive unscented Kalman filter. Acta Astronaut. 2017, 134, 159–169. [Google Scholar] [CrossRef]
- Zheng, X.; Fang, H. An integrated unscented kalman filter and relevance vector regression approach for lithium-ion battery remaining useful life and short-term capacity prediction. Reliab. Eng. Syst. Saf. 2015, 144, 74–82. [Google Scholar] [CrossRef]
- Soken, H.E.; Sakai, S. Residual Based Adaptive Unscented Kalman Filter for Satellite Attitude Estimation. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; pp. 1–15. [Google Scholar]
- Liu, X.; Liu, H.; Tang, Y.; Gao, Q.; Chen, Z. Fuzzy adaptive unscented Kalman filter control of epileptiform spikes in a class of neural mass models. Nonlinear Dyn. 2014, 76, 1291–1299. [Google Scholar] [CrossRef]
- Ning, X.; Li, Z.; Wu, W.; Yang, Y.; Fang, J.; Liu, G. Recursive adaptive filter using current innovation for celestial navigation during the Mars approach phase. Sci. China 2017, 60, 032205:1–032205:15. [Google Scholar] [CrossRef]
- Gan, X.; Gao, W.; Dai, Z.; Liu, W. Research on WNN soft fault diagnosis for analog circuit based on adaptive UKF algorithm. Appl. Soft. Comput. 2017, 50, 252–259. [Google Scholar]
- Yang, Y.; Gao, W. A new learning statistic for adaptive filter based on predicted residuals. Prog. Nat. Sci. 2006, 16, 833–837. [Google Scholar]
- Yang, Y.; Gao, W. An optimal adaptive Kalman filter. J. Geod. 2006, 80, 177–183. [Google Scholar] [CrossRef]
- Soken, H.E.; Hajiyev, C. Pico satellite attitude estimation via Robust Unscented Kalman Filter in the presence of measurement faults. ISA Trans. 2010, 49, 249–256. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; He, H.; Xu, G. Adaptively robust filtering for kinematic geodetic positioning. J. Geod. 2001, 75, 109–116. [Google Scholar] [CrossRef]
- Seung, J.H.; Atiya, A.F.; Parlos, A.G.; Chong, K.T. Identification of unknown parameter value for precise flow control of Coupled Tank using Robust Unscented Kalman filter. Int. J. Precis. Eng. Manuf. 2017, 18, 31–38. [Google Scholar] [CrossRef]
- Hajiyev, C.; Ersin, H. Robust Adaptive Kalman Filter for estimation of UAV dynamics in the presence of sensor/actuator faults. Aerosp. Sci. Technol. 2013, 1, 1–8. [Google Scholar] [CrossRef]
- Hajiyev, C. Tracy-Widom distribution based fault detection approach: application to aircraft sensor/actuator fault detection. ISA Trans. 2012, 51, 189–197. [Google Scholar] [CrossRef] [PubMed]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
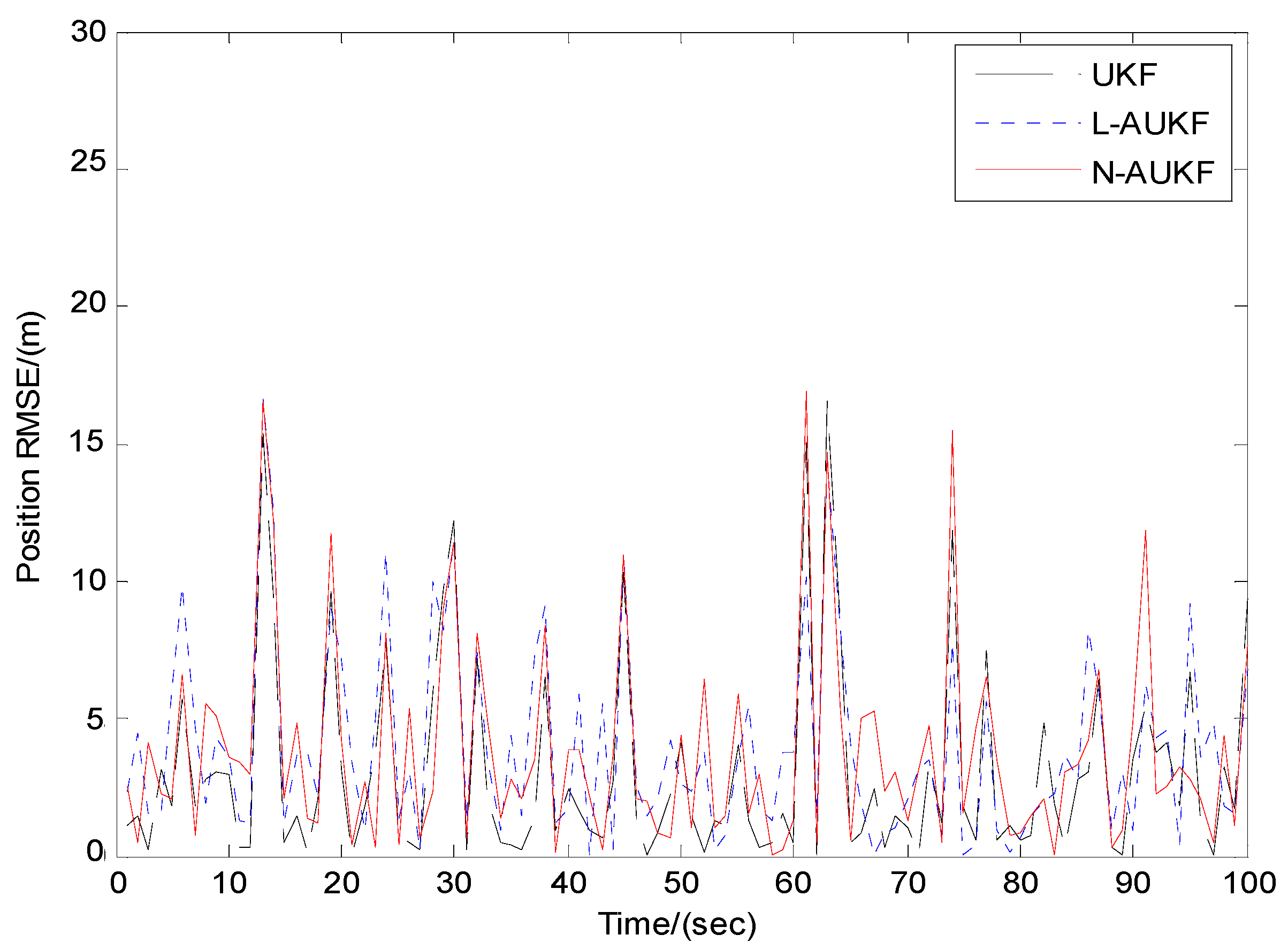
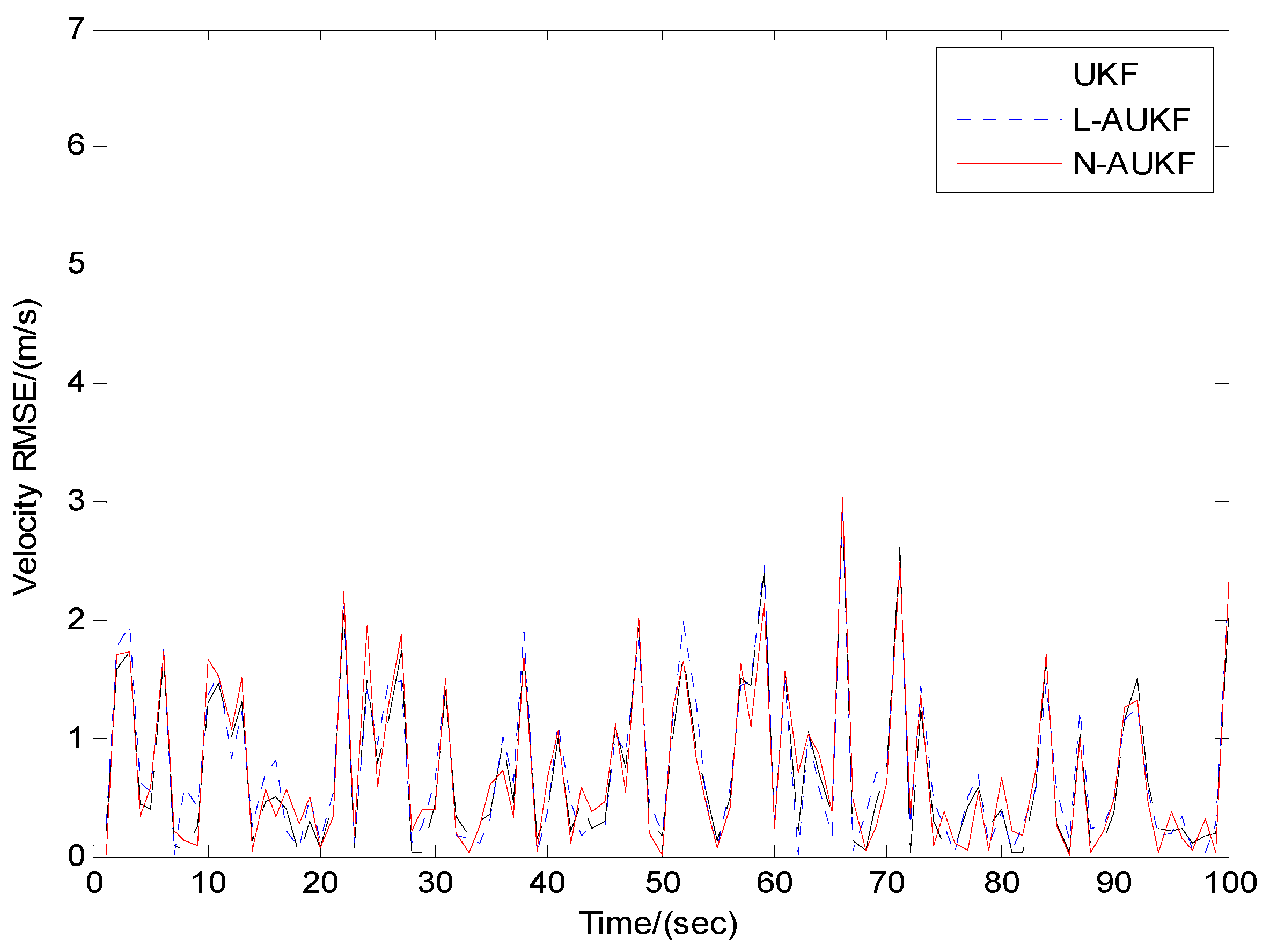
| Algorithm | Position Error (m) | Velocity Error (m/s) | ||
|---|---|---|---|---|
| Mean | Variance | Mean | Variance | |
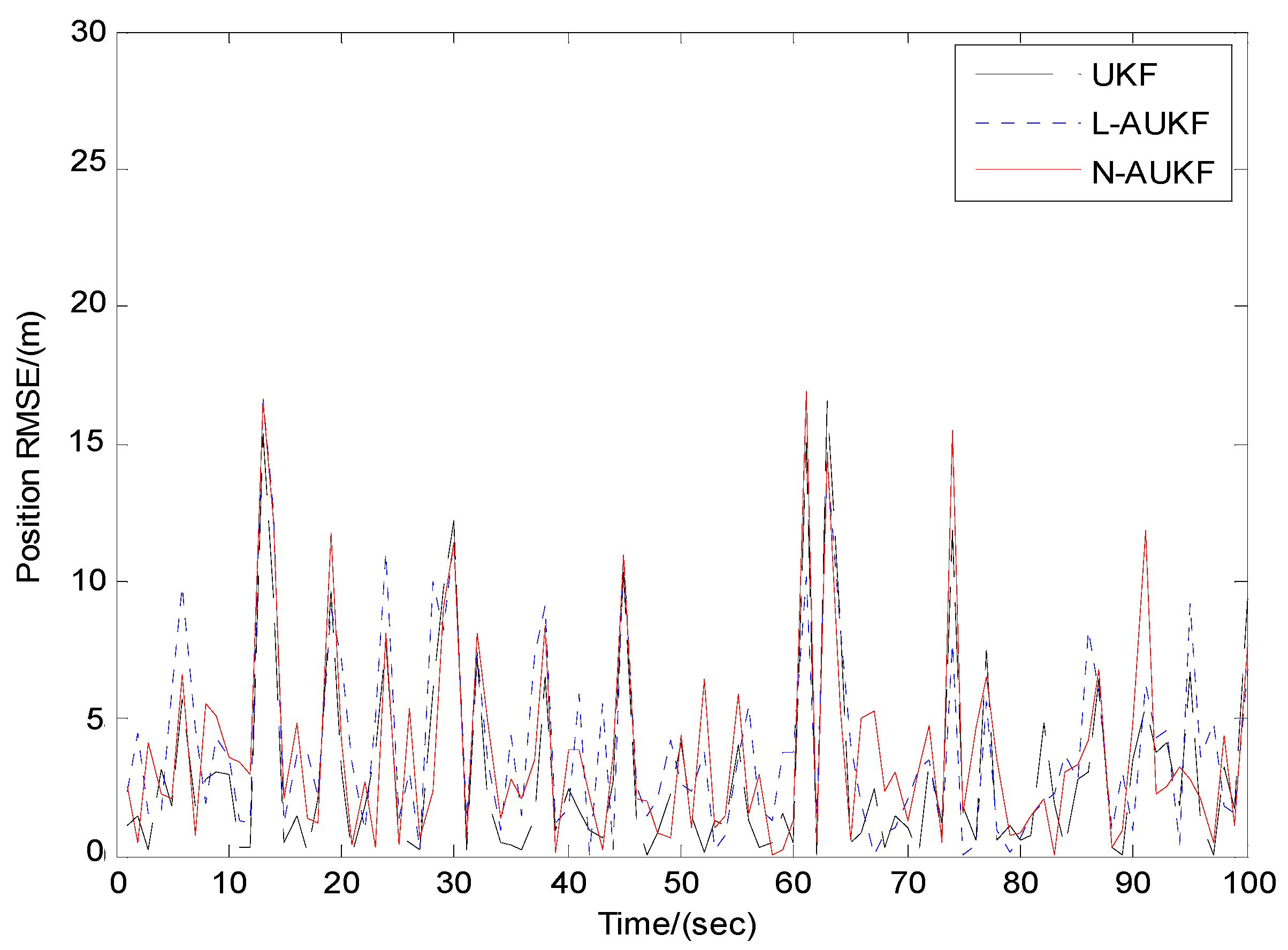
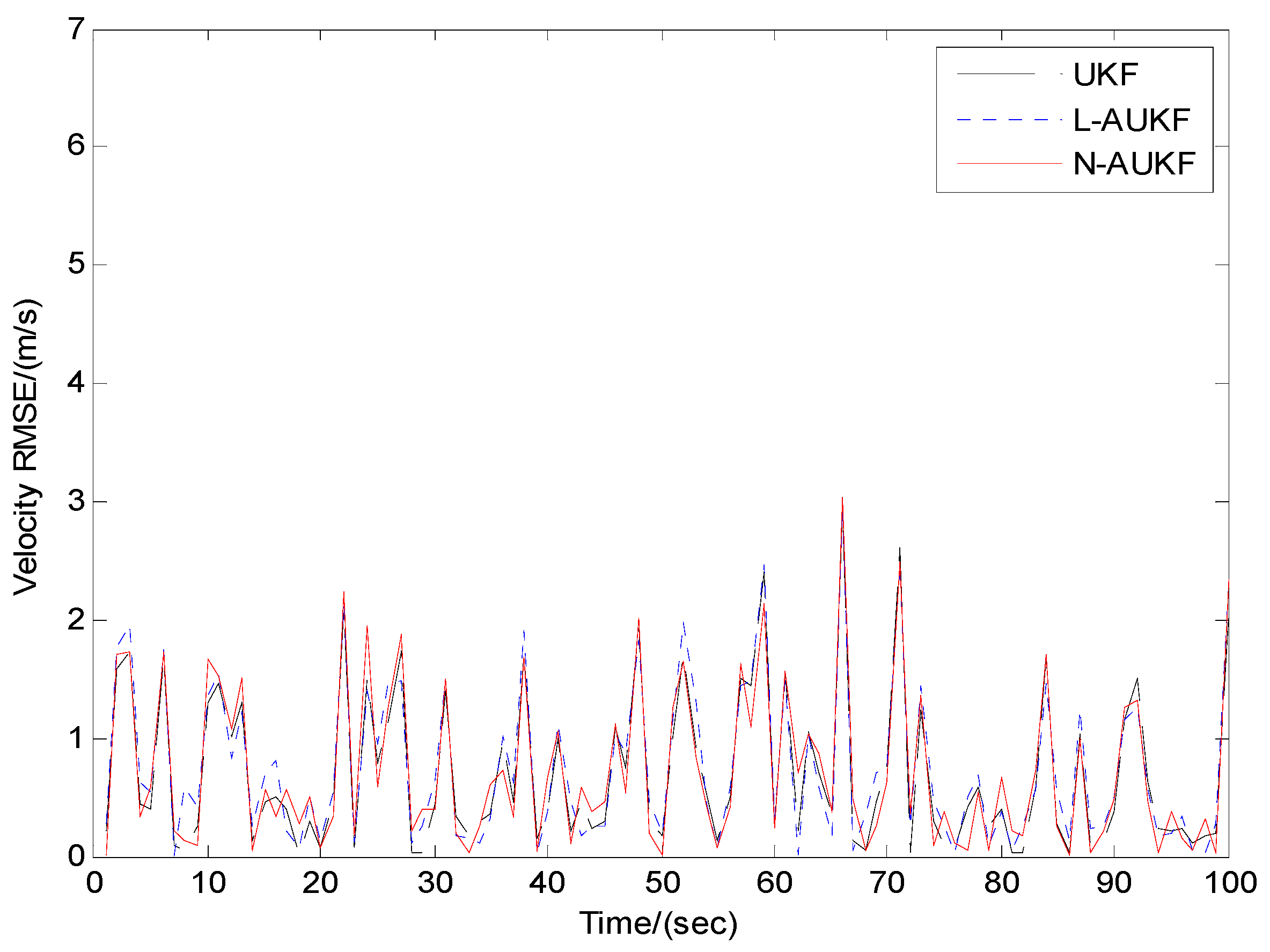
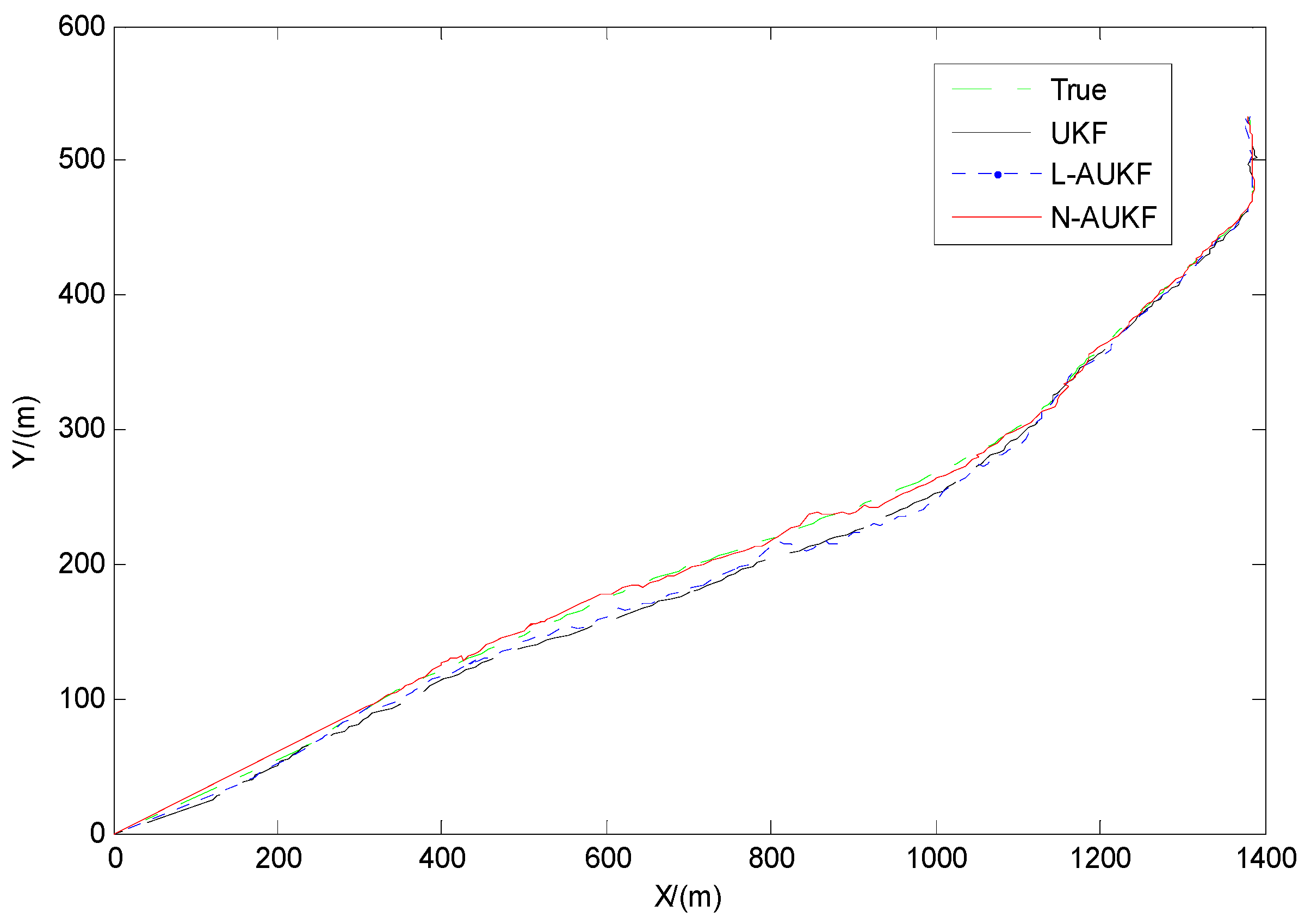
| UKF | 4.6438 | 2.9790 | 0.8750 | 0.7054 |
| L-AUKF | 4.2685 | 2.5421 | 0.8326 | 0.7247 |
| N-AUKF | 4.0533 | 2.2850 | 0.8821 | 0.6596 |
| Algorithm | Position Error (m) | Velocity Error (m/s) | ||
|---|---|---|---|---|
| Mean | Variance | Mean | Variance | |
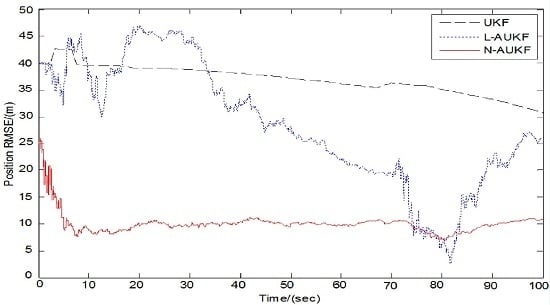
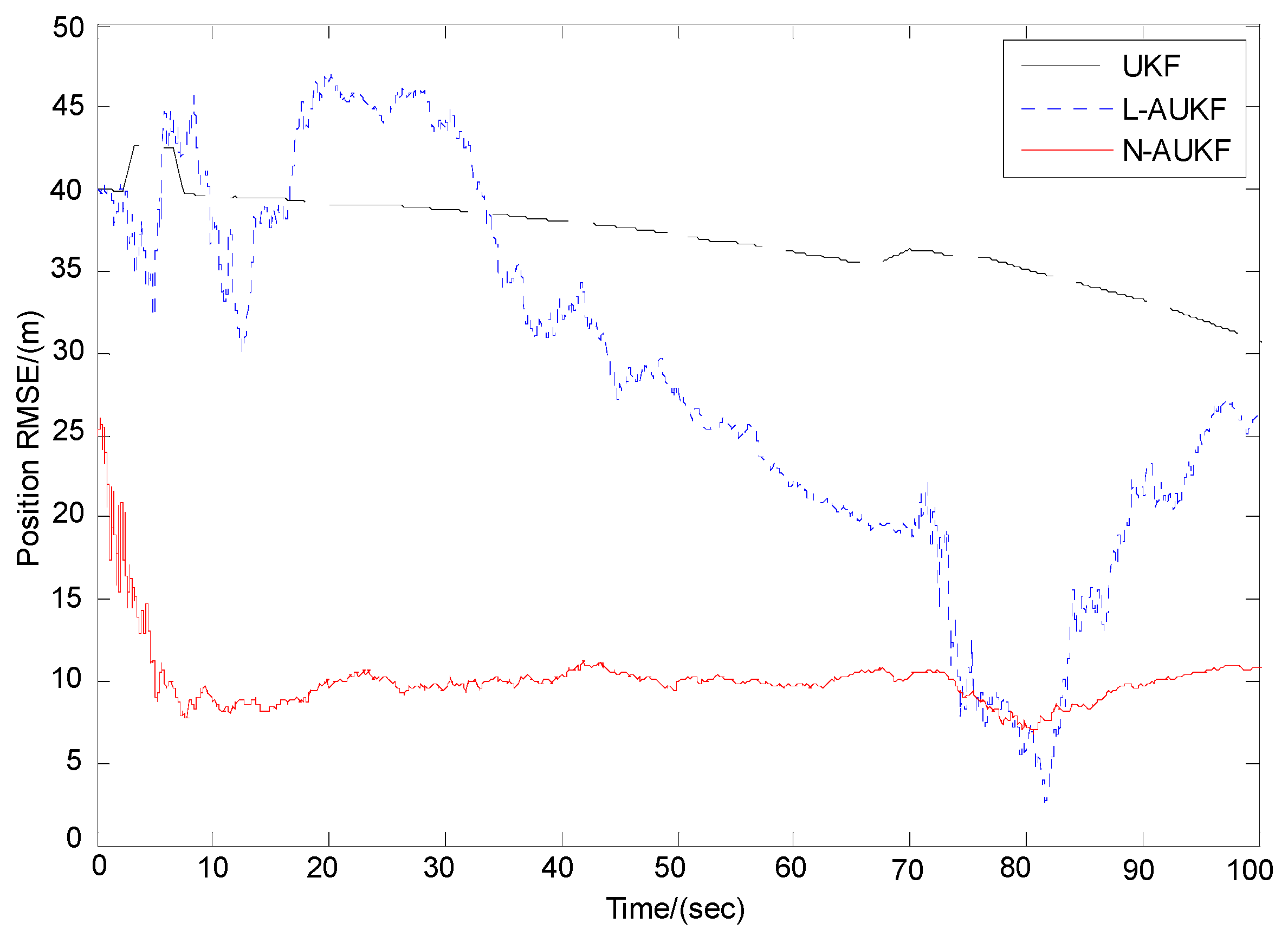
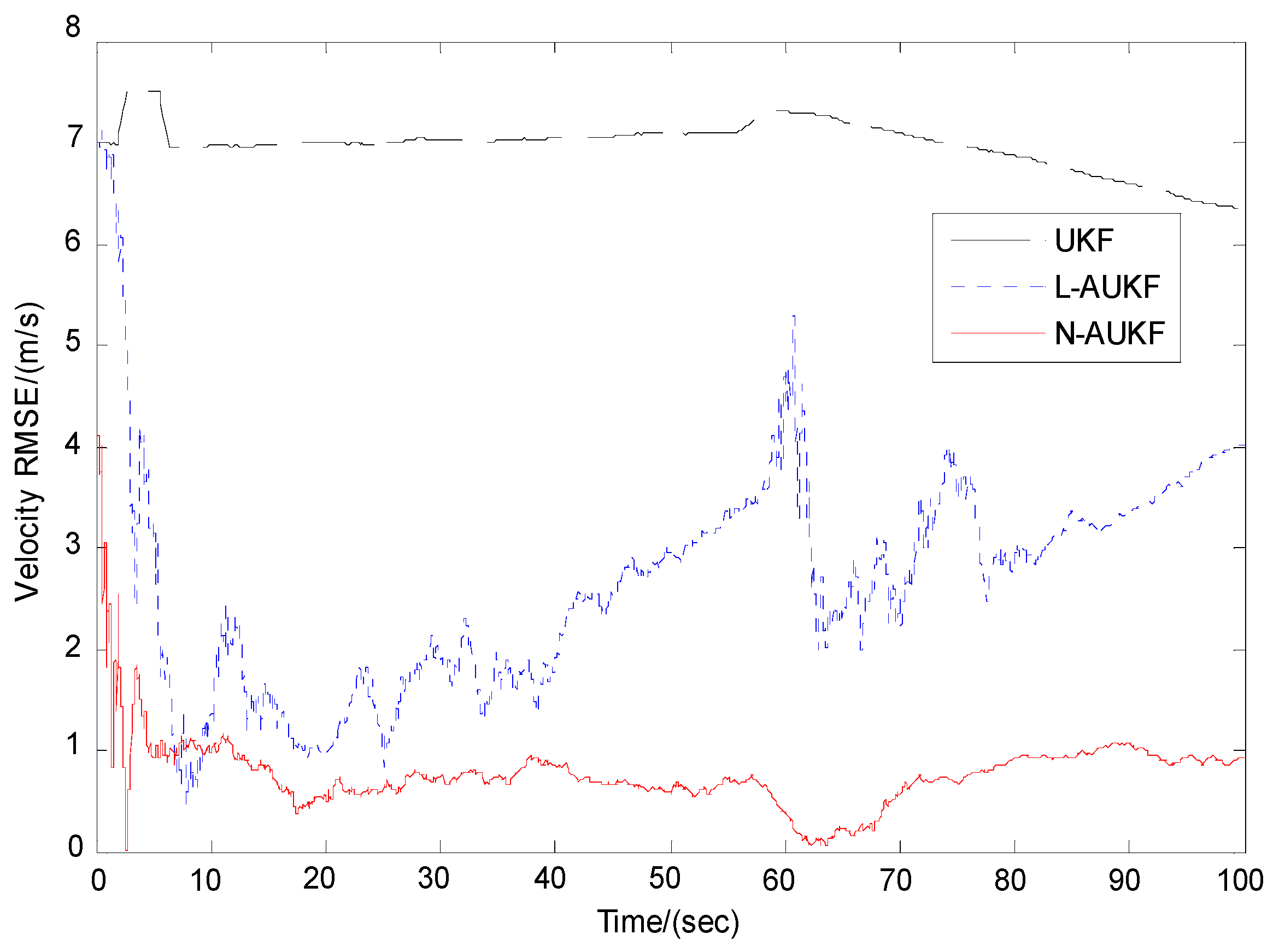
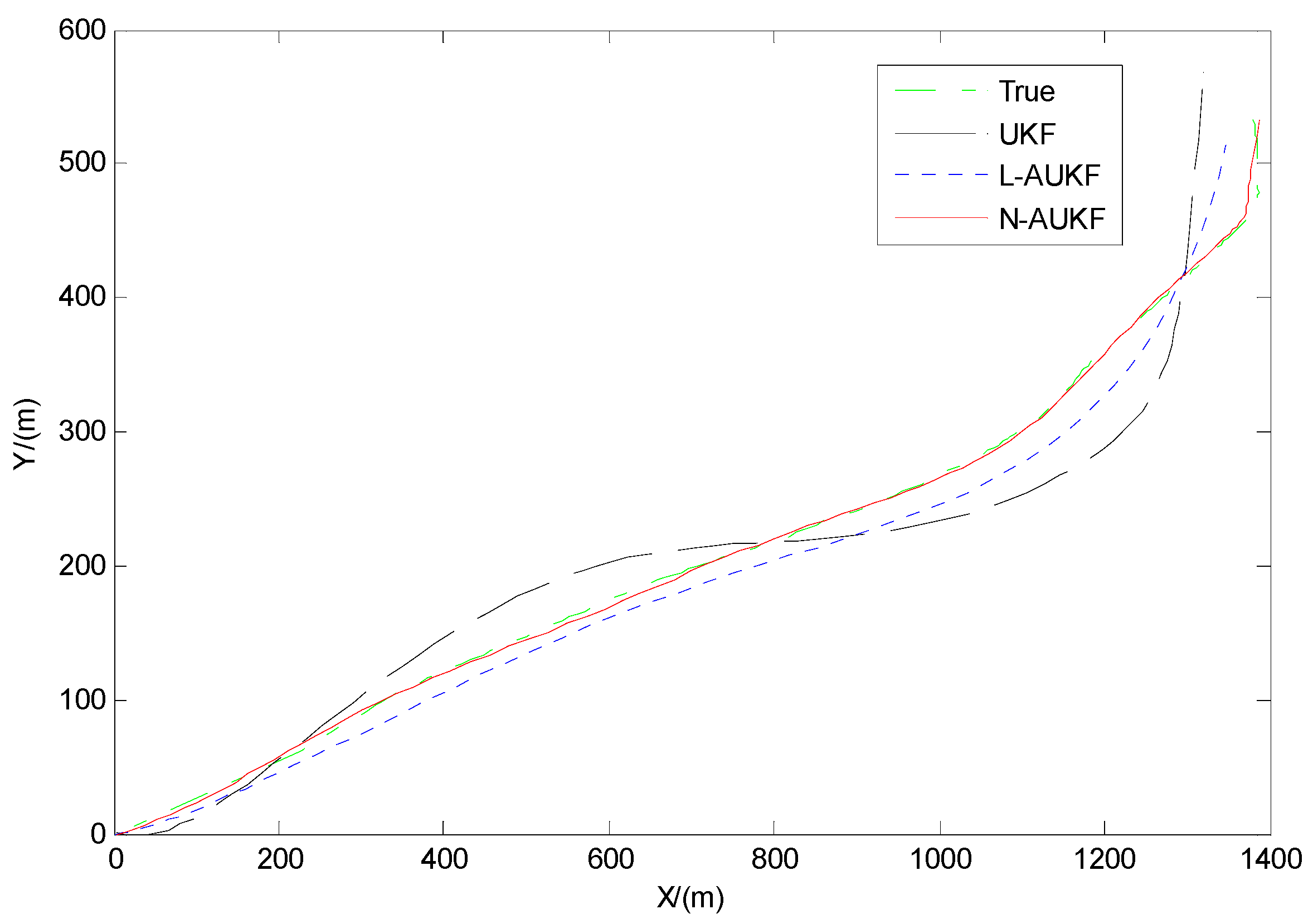
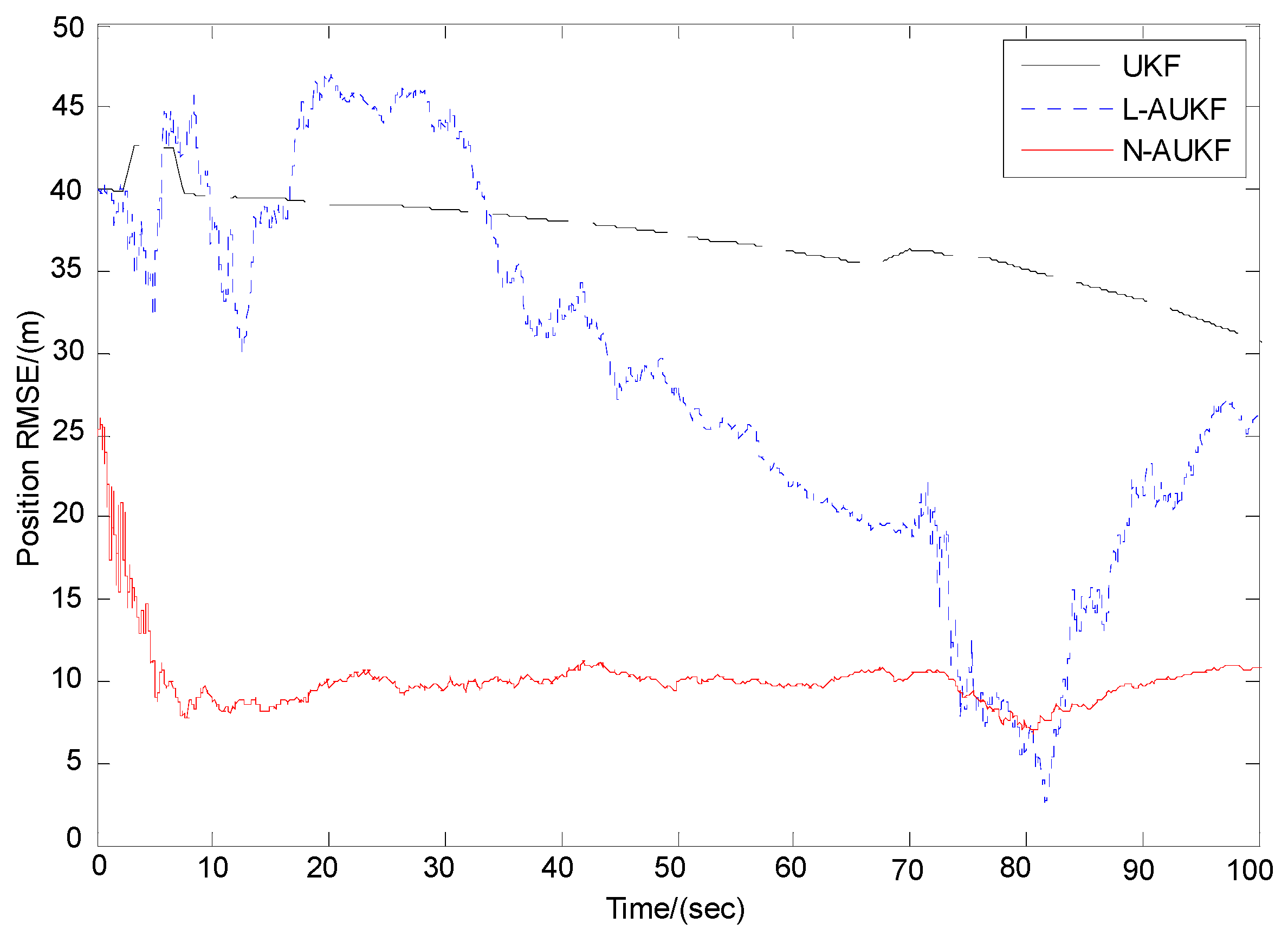
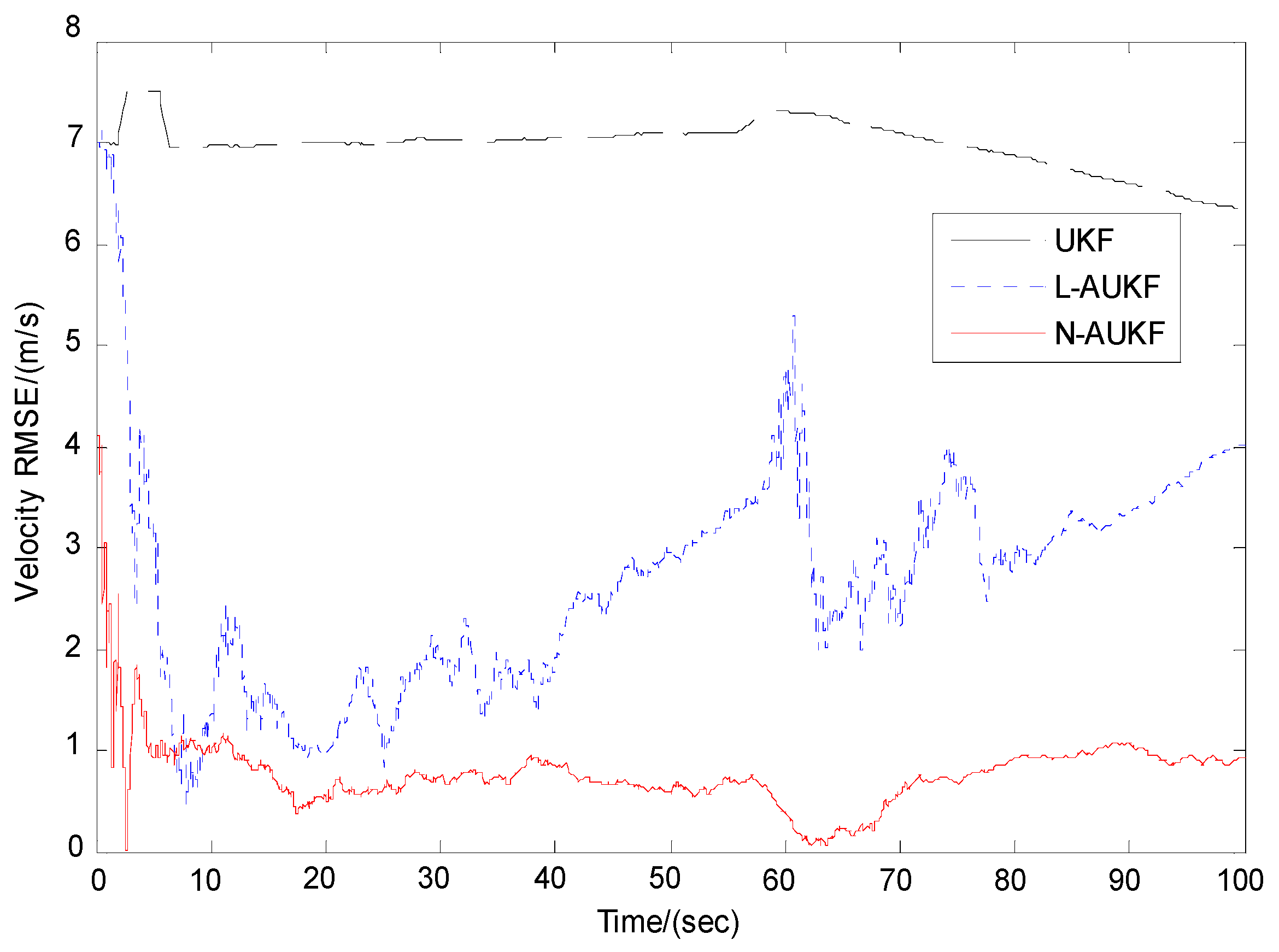
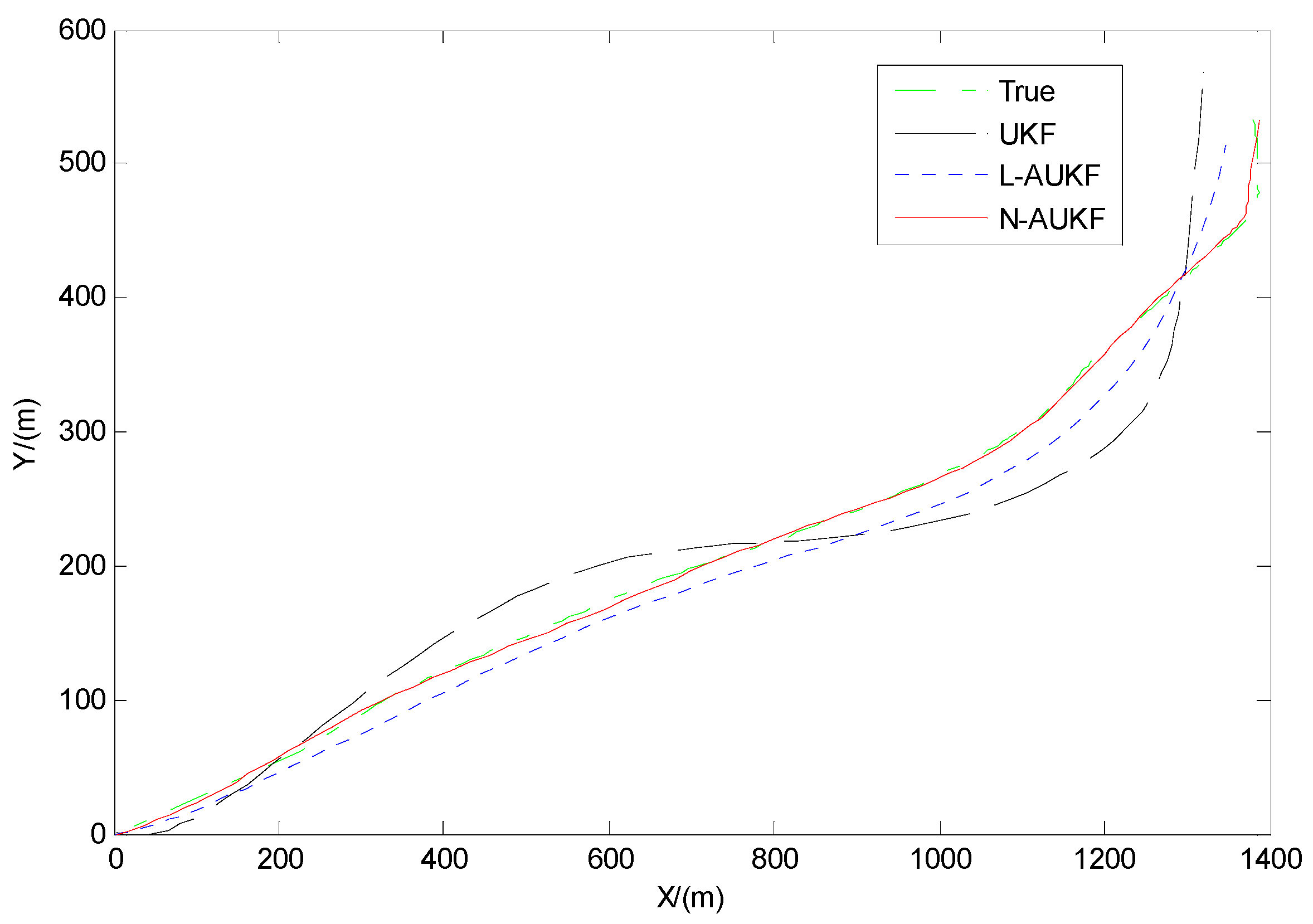
| UKF | 37.6647 | 6.2481 | 6.9442 | 5.2972 |
| L-AUKF | 26.5571 | 5.3244 | 2.7469 | 5.3367 |
| N-AUKF | 8.4256 | 1.0057 | 0.9015 | 0.7523 |
| Algorithm | Position Error (m) | Velocity Error (m/s) | ||
|---|---|---|---|---|
| Mean | Variance | Mean | Variance | |
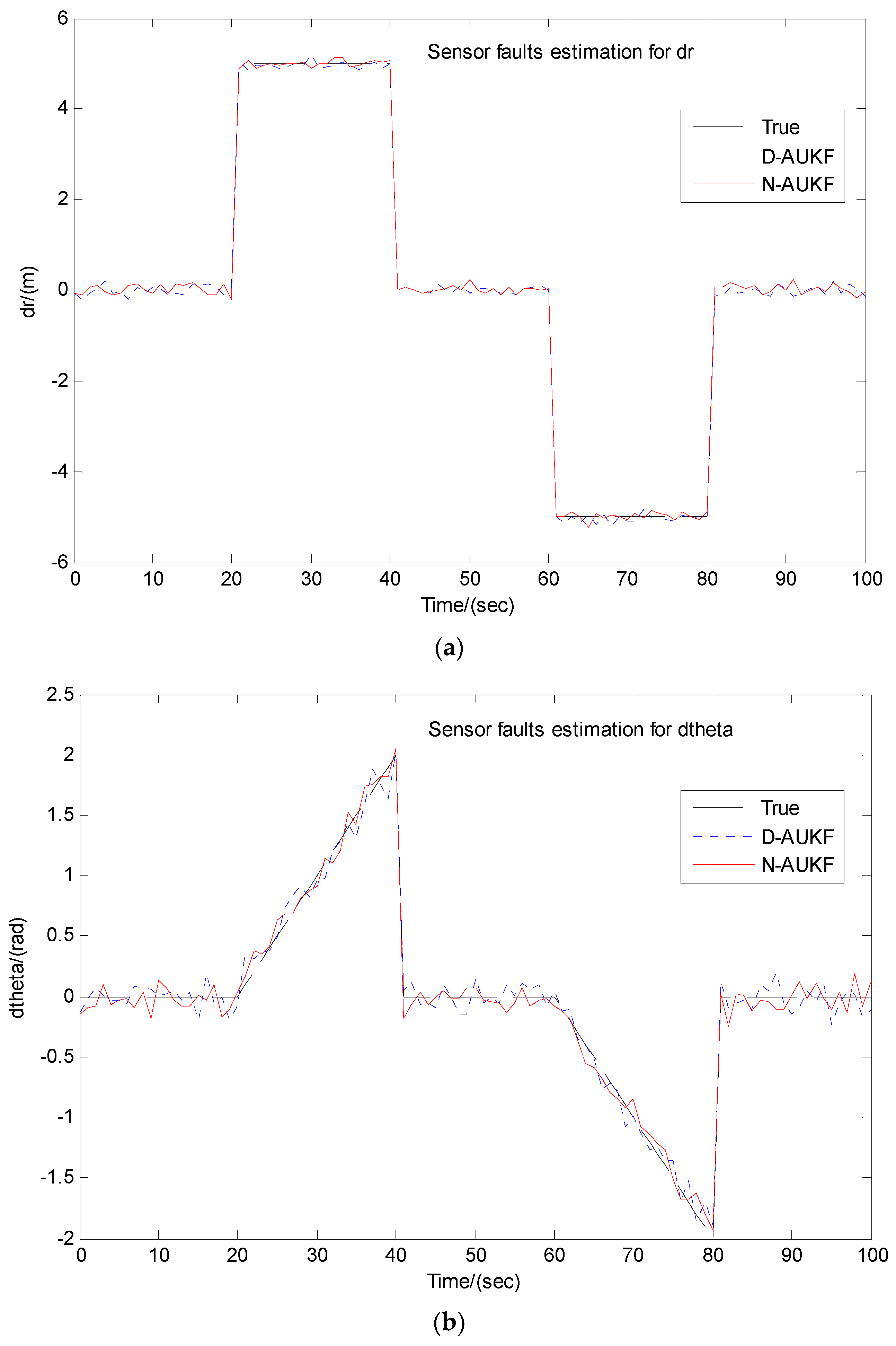
| D-AUKF | 18.2655 | 3.8917 | 2.1542 | 4.2263 |
| N-AUKF | 7.9632 | 0.9117 | 0.7854 | 0.6544 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Huang, H.; Zhao, H.; Zhao, X.; Yin, X. Adaptive Unscented Kalman Filter for Target Tracking in the Presence of Nonlinear Systems Involving Model Mismatches. Remote Sens. 2017, 9, 657. https://doi.org/10.3390/rs9070657
Zhou H, Huang H, Zhao H, Zhao X, Yin X. Adaptive Unscented Kalman Filter for Target Tracking in the Presence of Nonlinear Systems Involving Model Mismatches. Remote Sensing. 2017; 9(7):657. https://doi.org/10.3390/rs9070657
Chicago/Turabian StyleZhou, Huan, Hanqiao Huang, Hui Zhao, Xin Zhao, and Xiang Yin. 2017. "Adaptive Unscented Kalman Filter for Target Tracking in the Presence of Nonlinear Systems Involving Model Mismatches" Remote Sensing 9, no. 7: 657. https://doi.org/10.3390/rs9070657