
An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping


 , , ,
, , , 
Abstract
:
1. Introduction
2. Methods
2.1. GNSS/INS in GNSS-Challenged Environments
2.2. SLAM in Forest Areas
2.3. Instrumentation
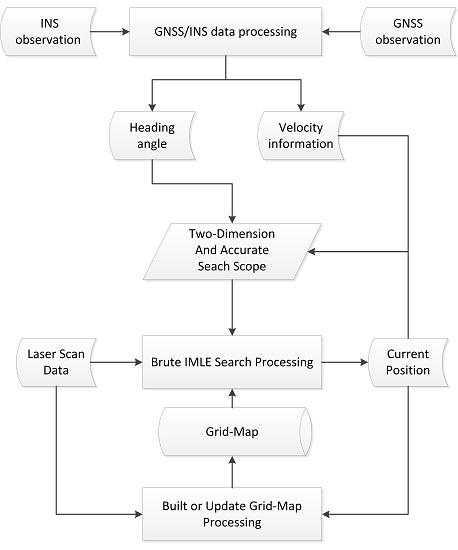
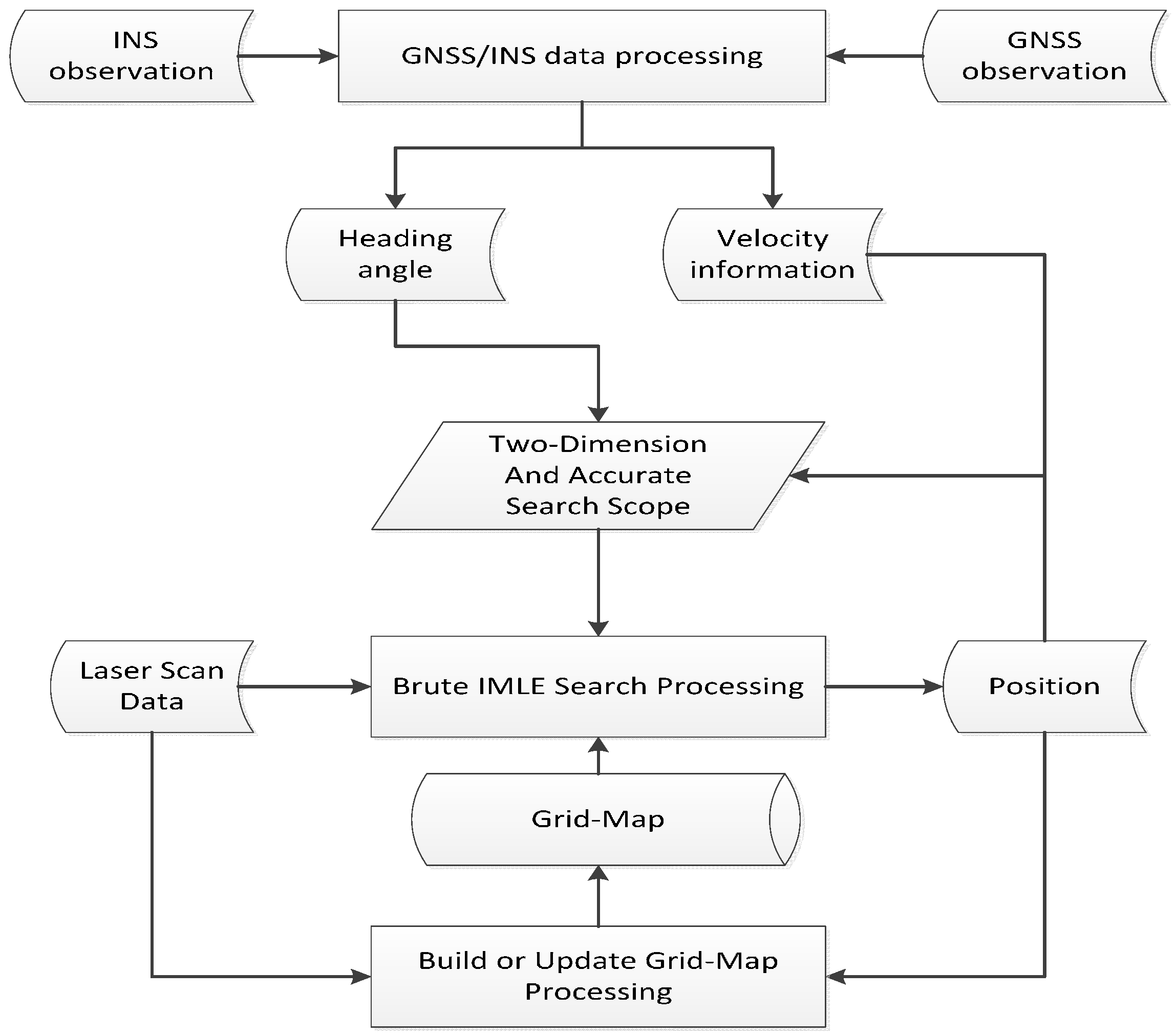
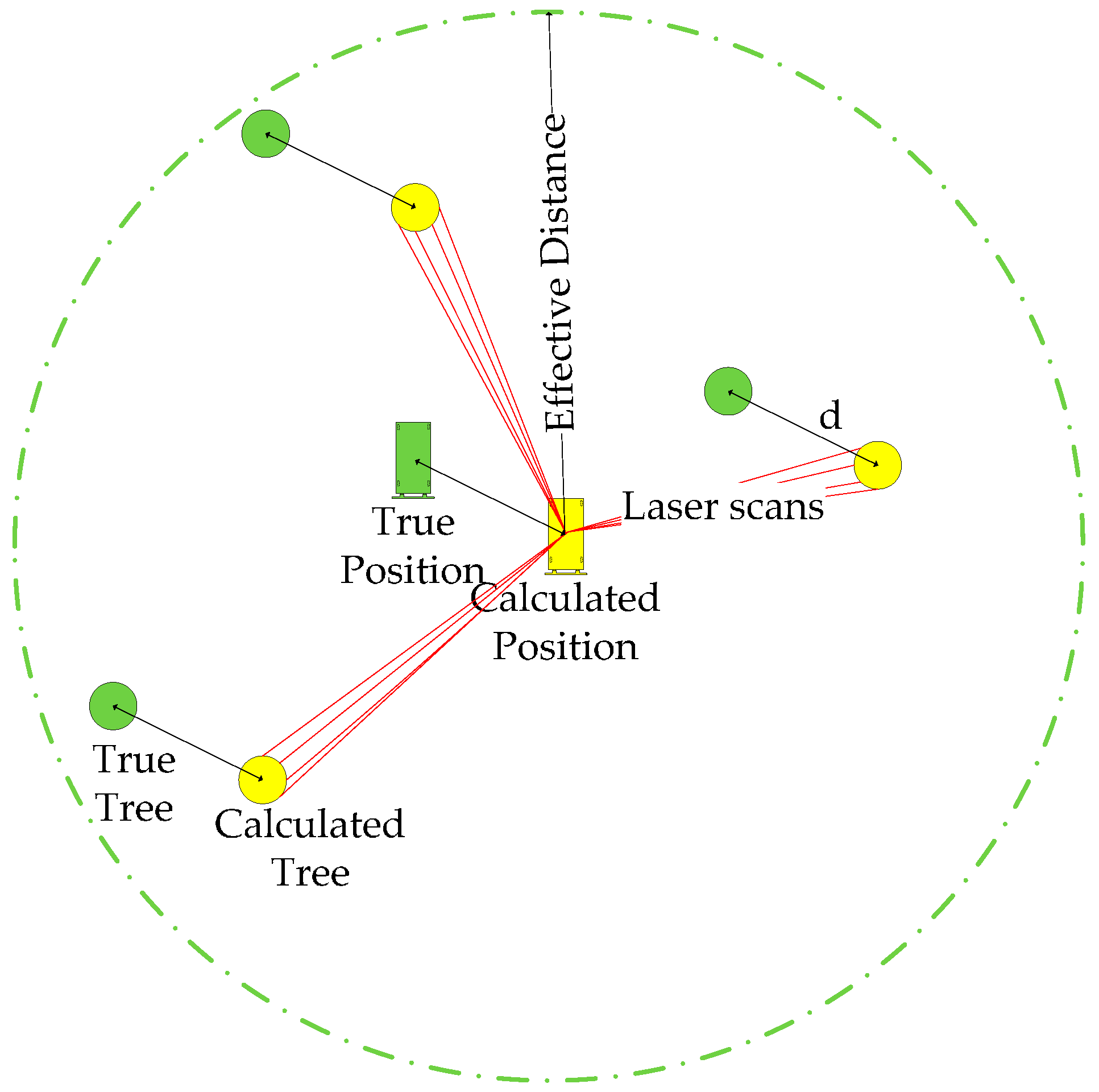
2.4. Integration Method in Forests
3. Field Test
4. Results and Discussion
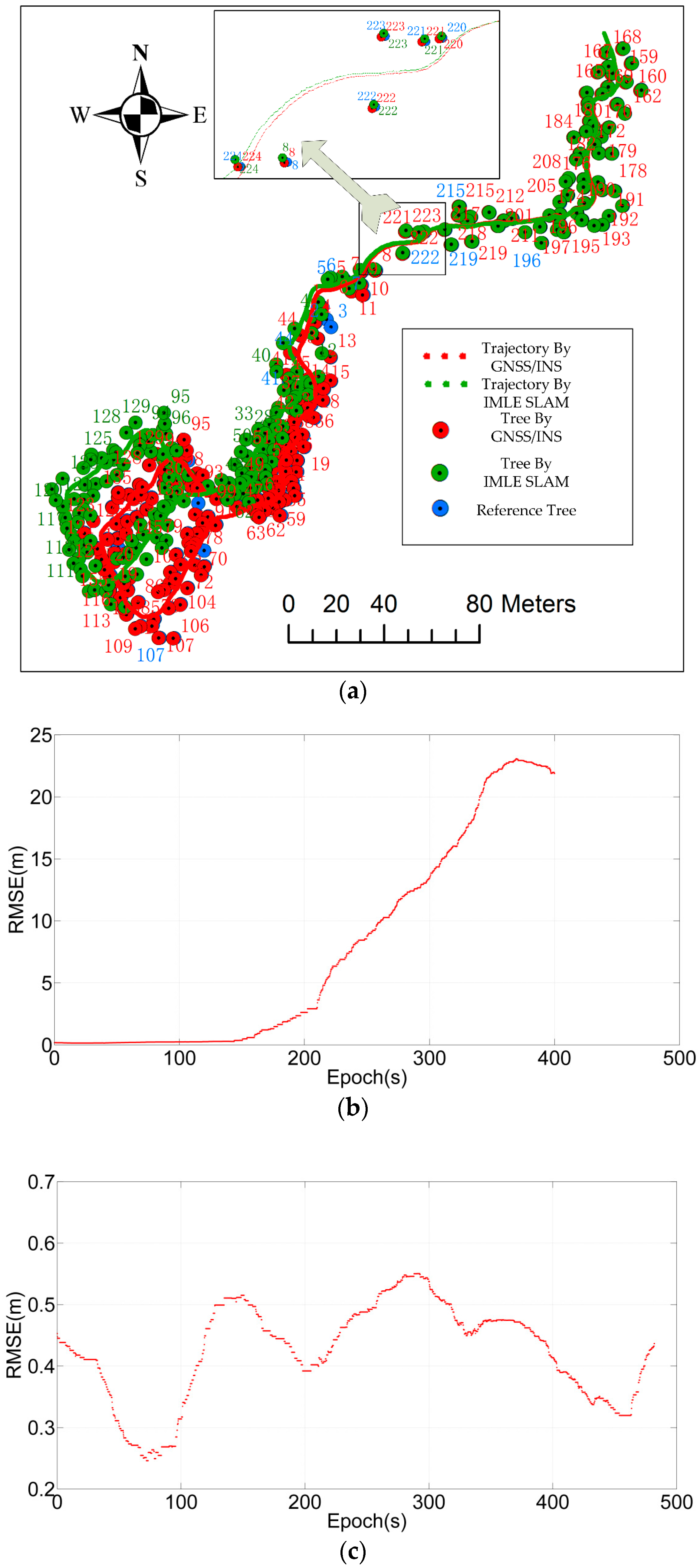
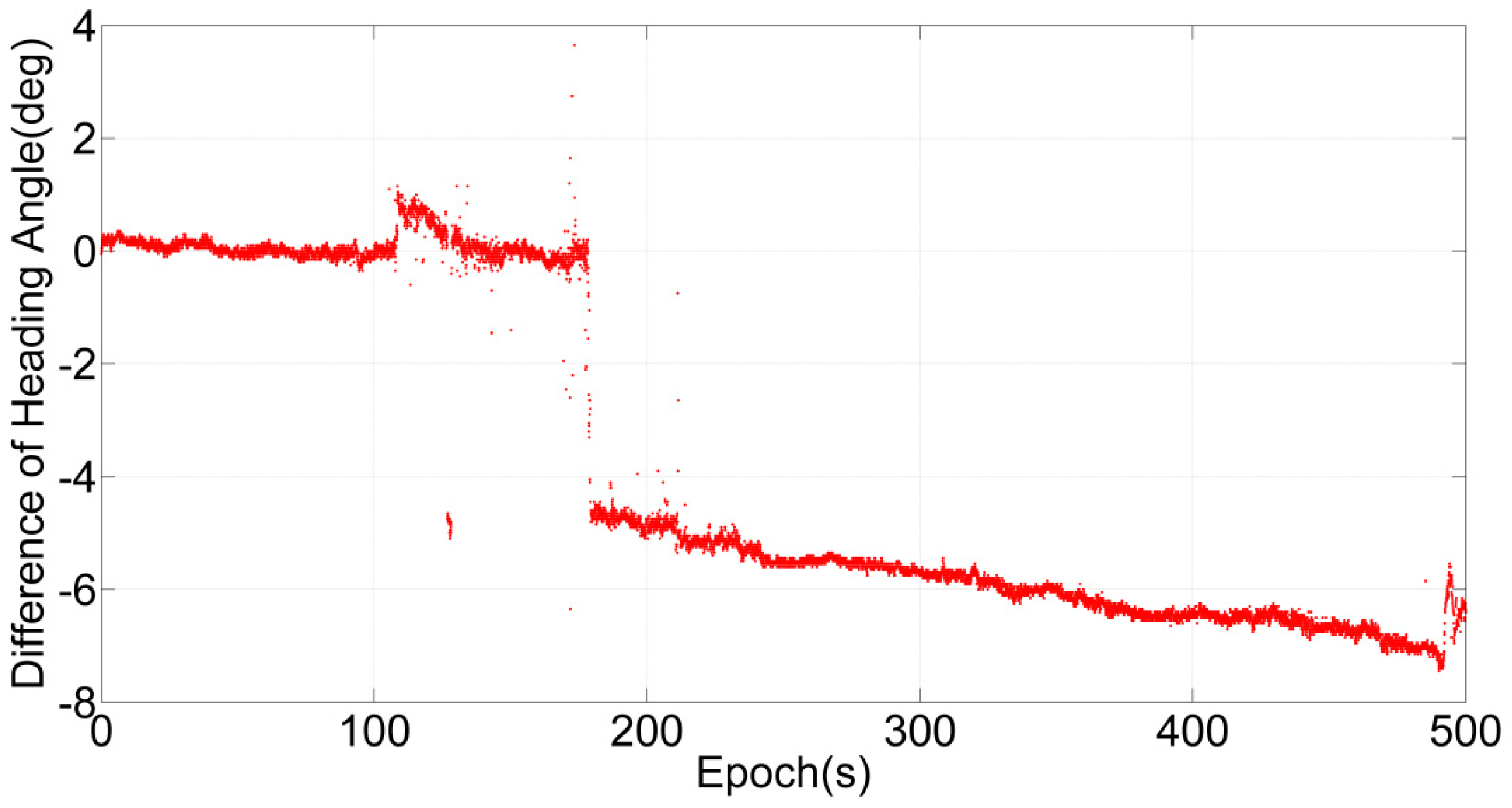
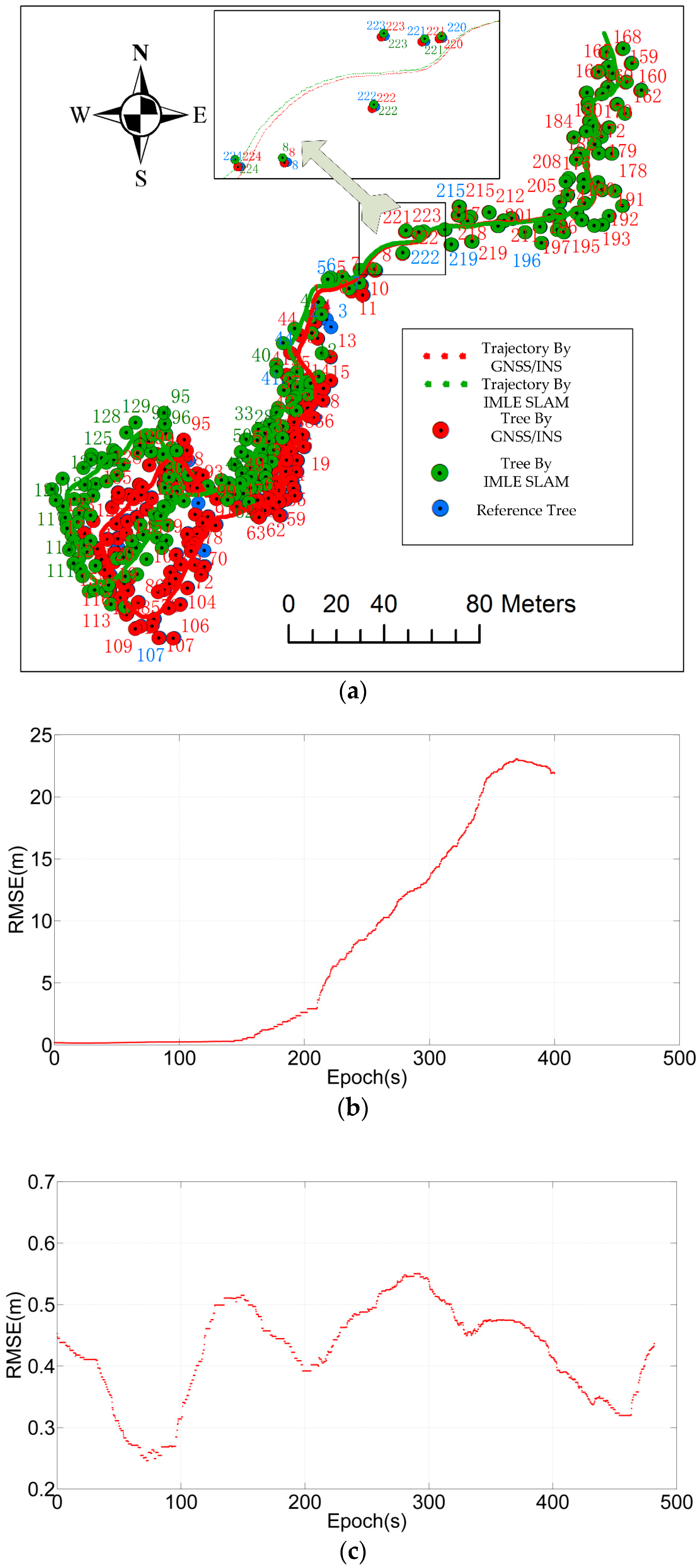
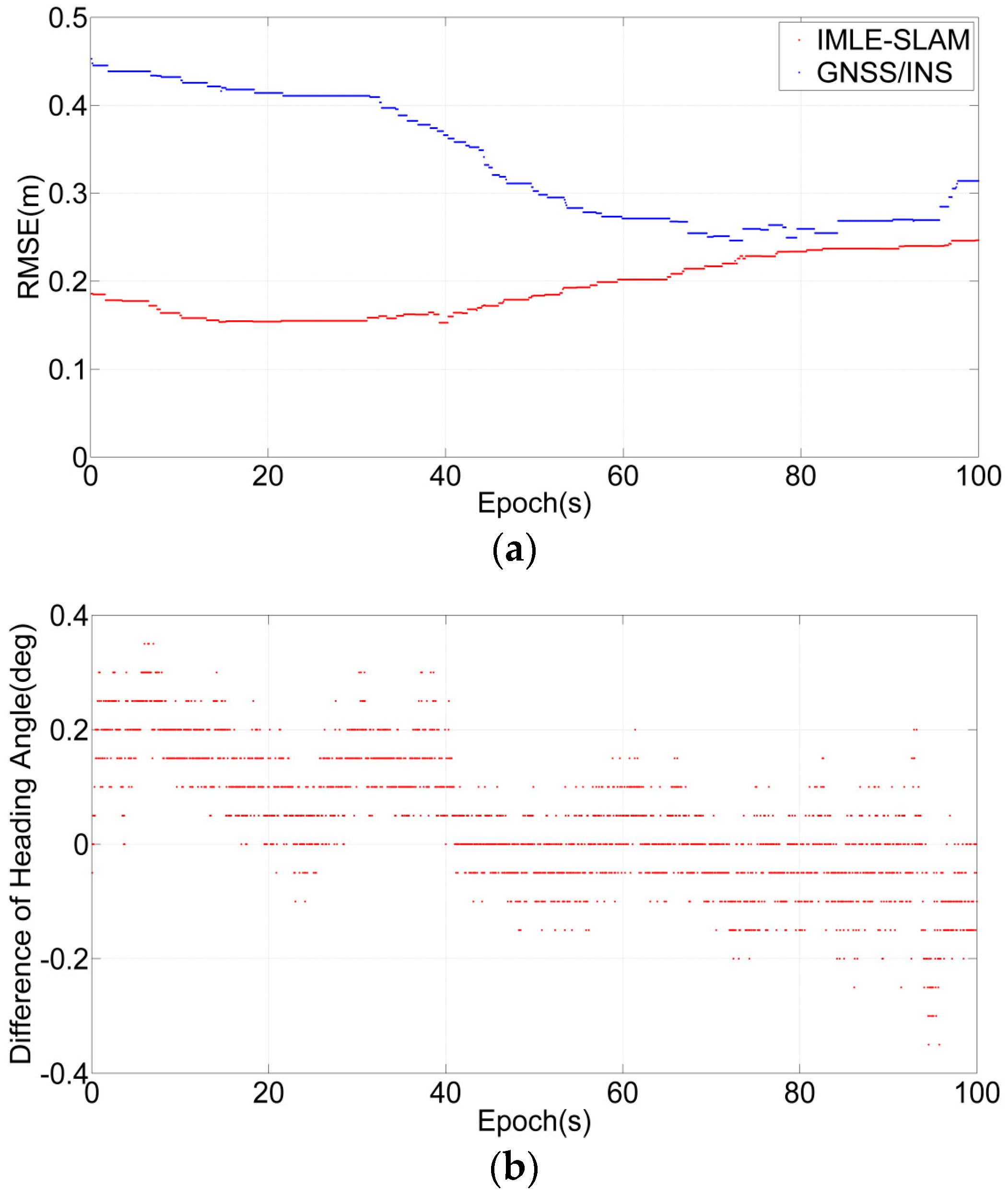
4.1. Separate Evaluation of GNSS/INS and IMLE-SLAM Methods
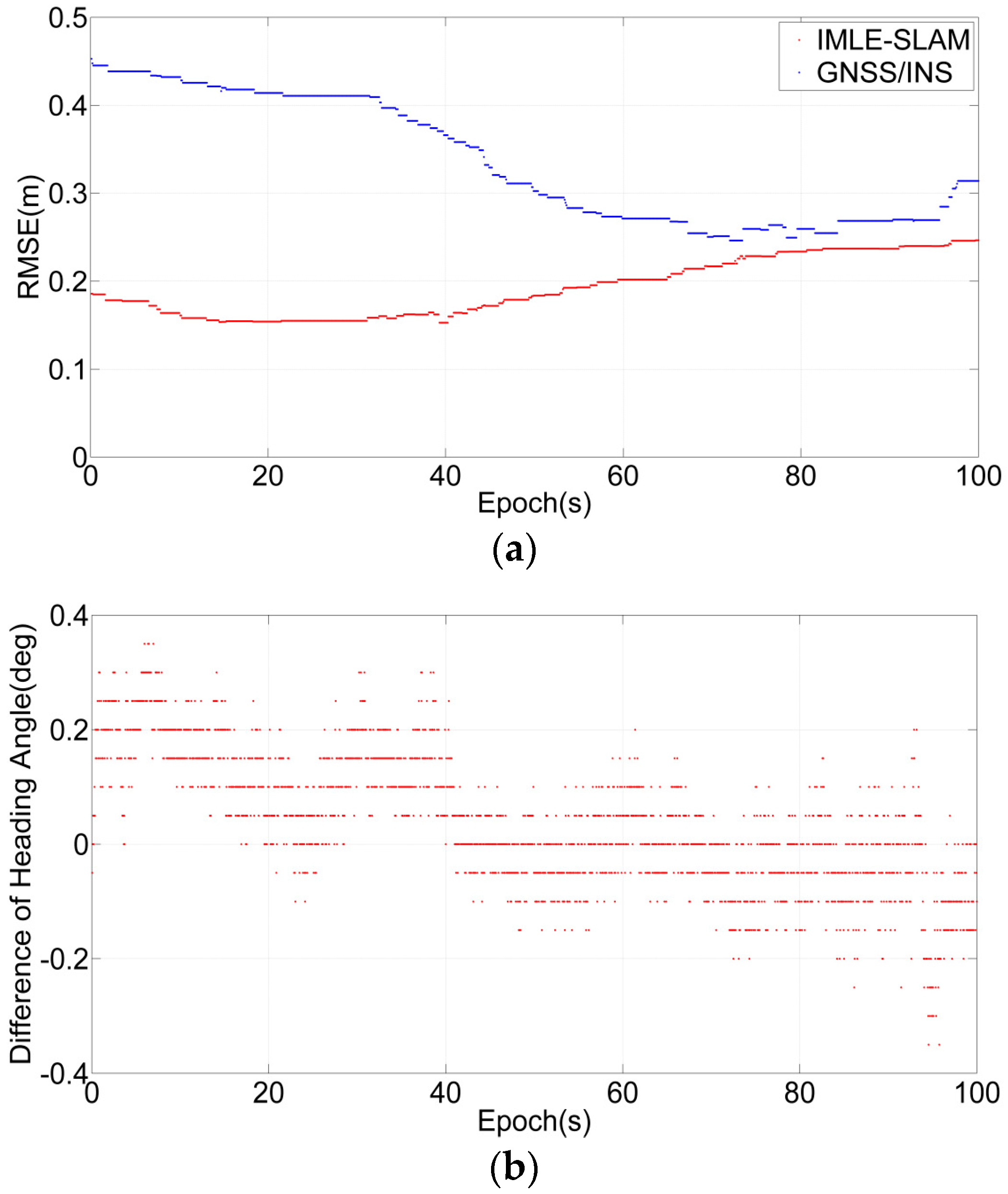
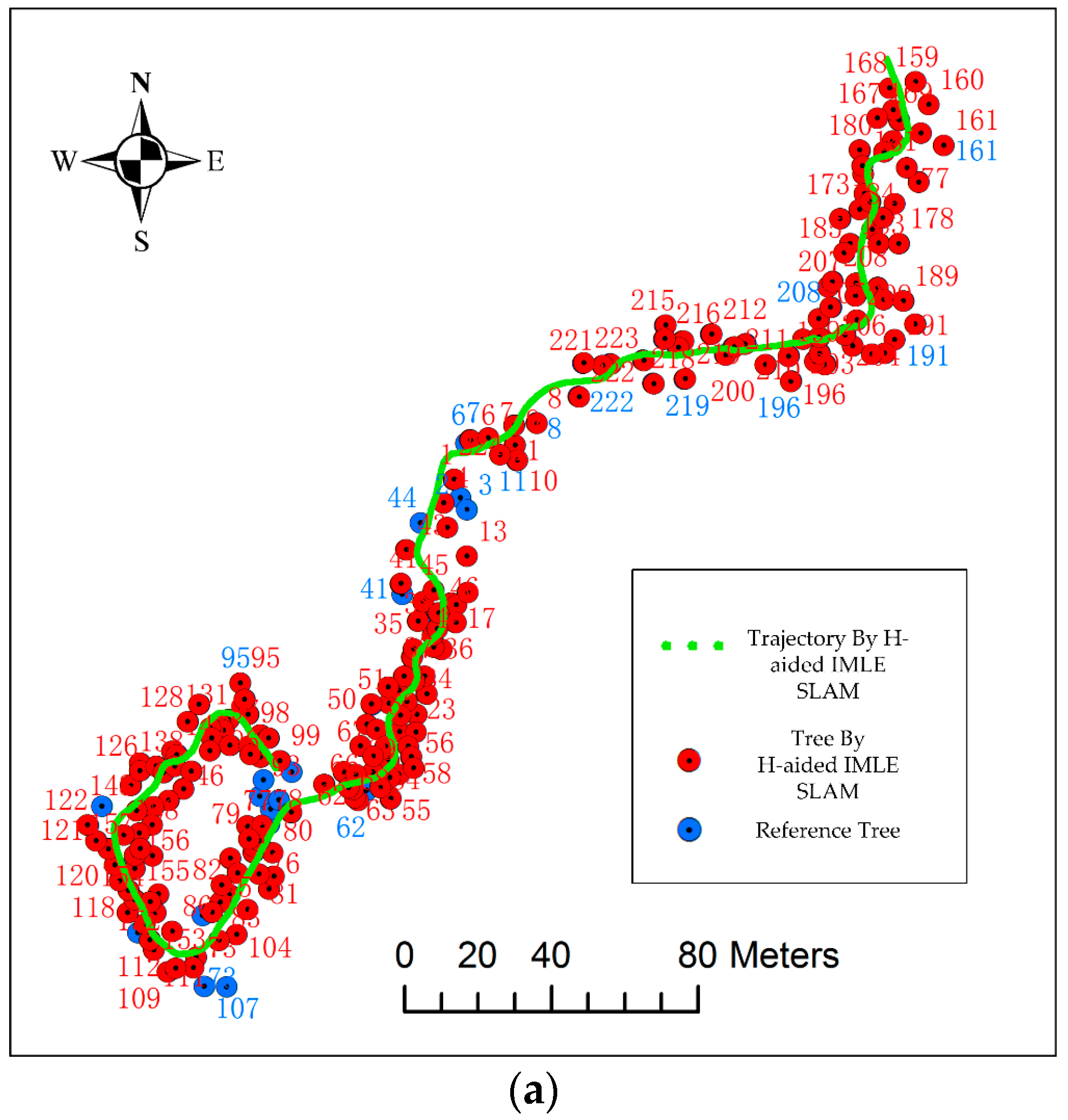
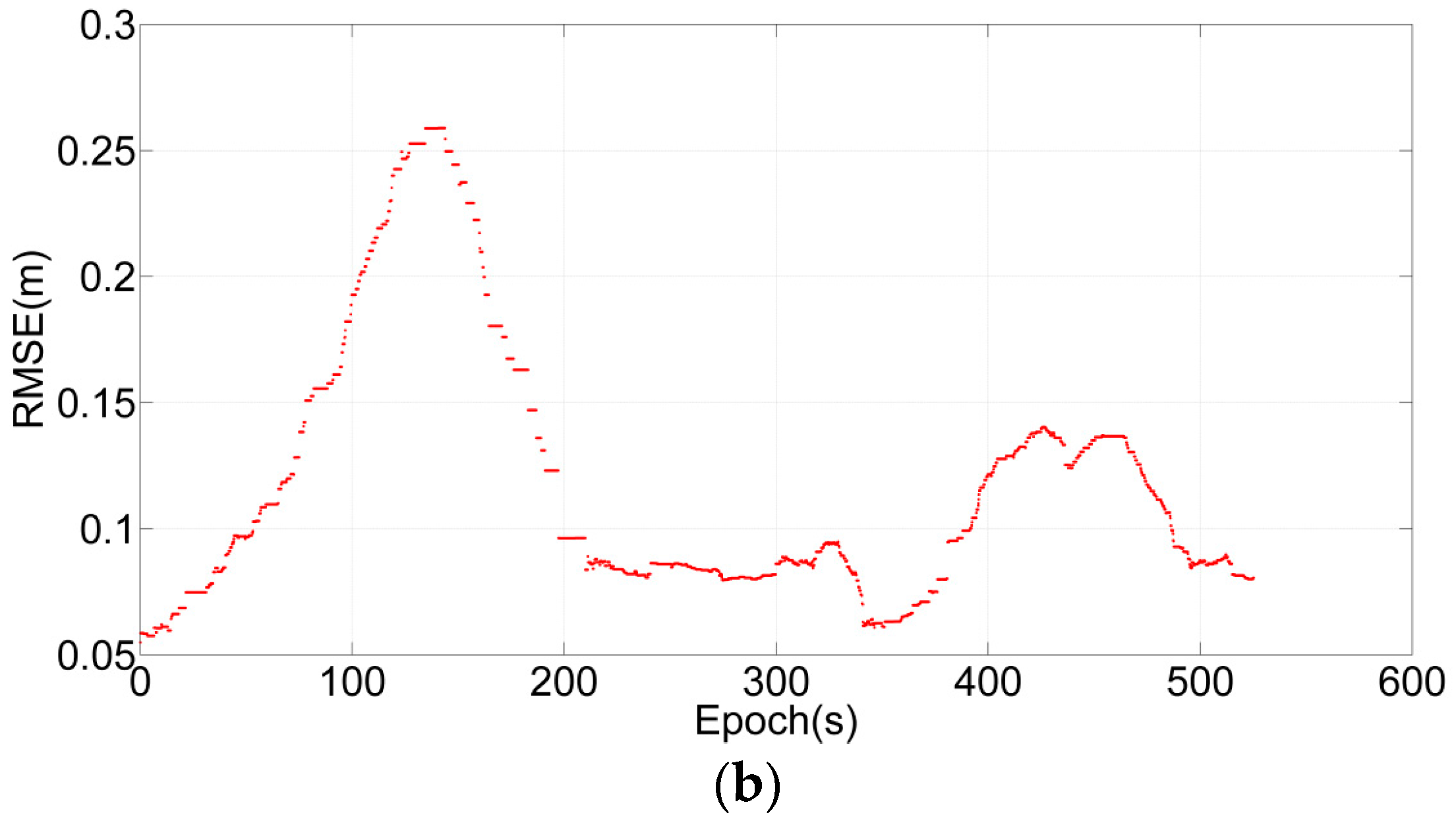
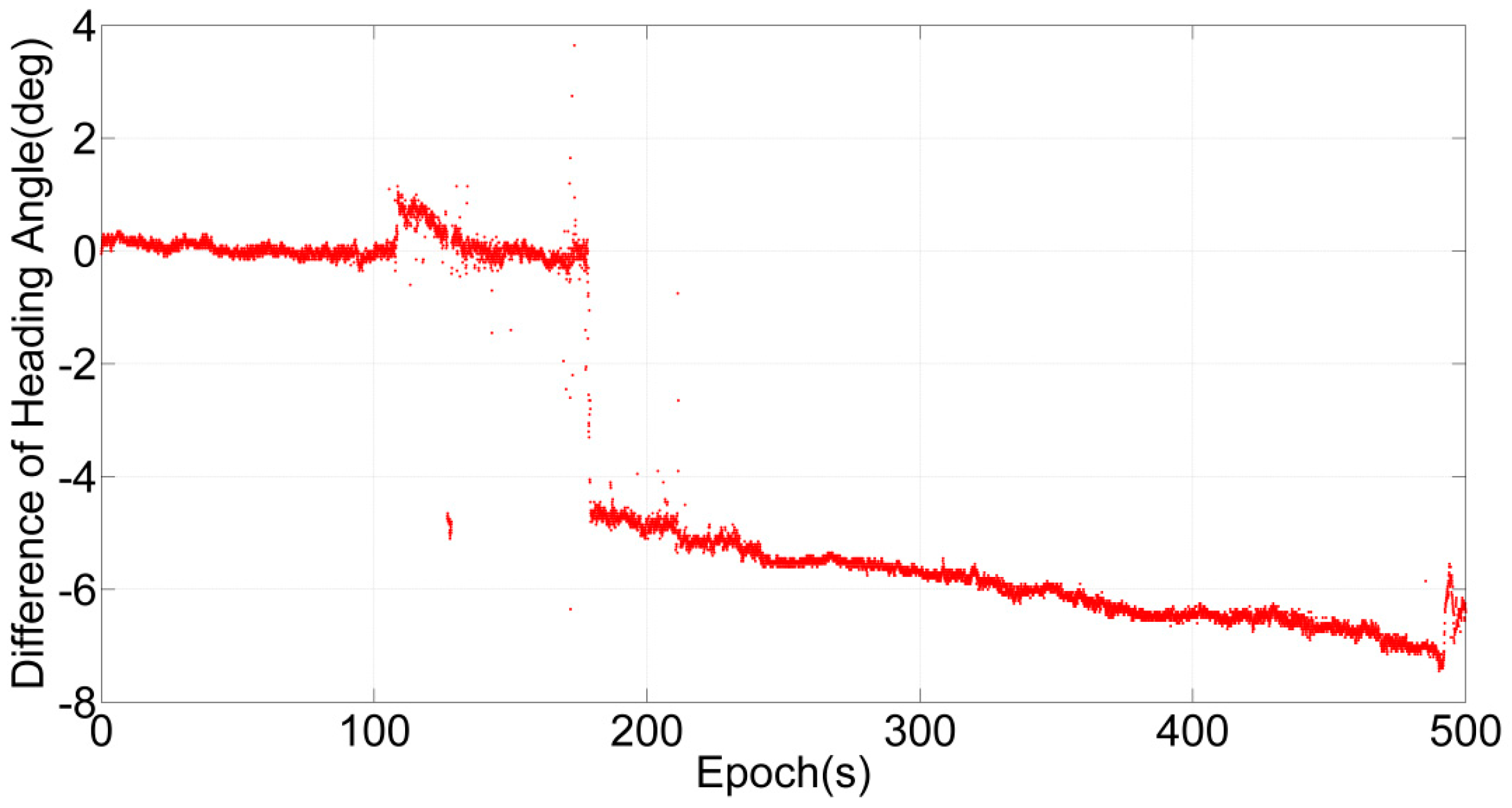
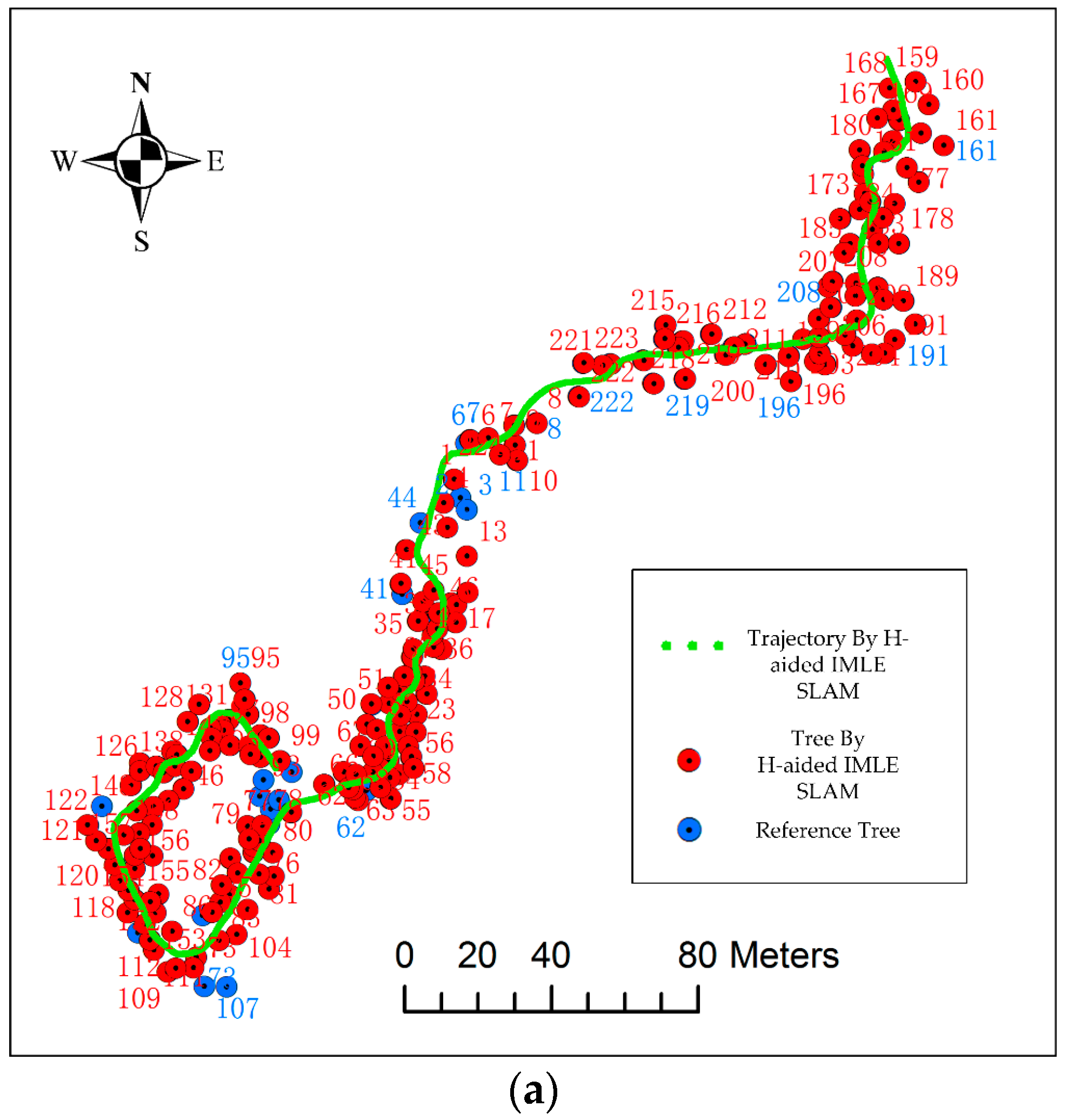
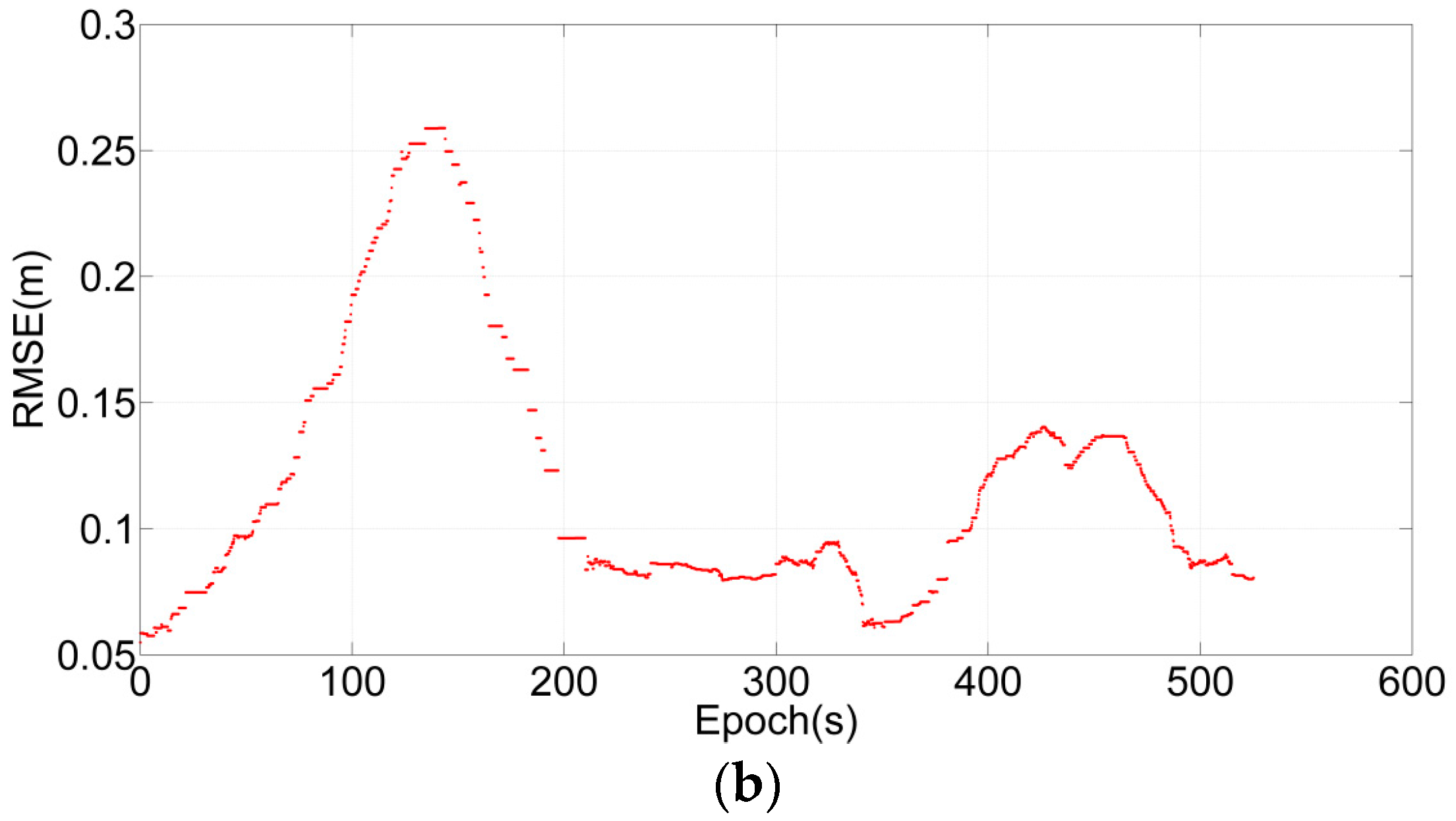
4.2. Results from the IMLE-SLAM Method Aided by Heading Angle
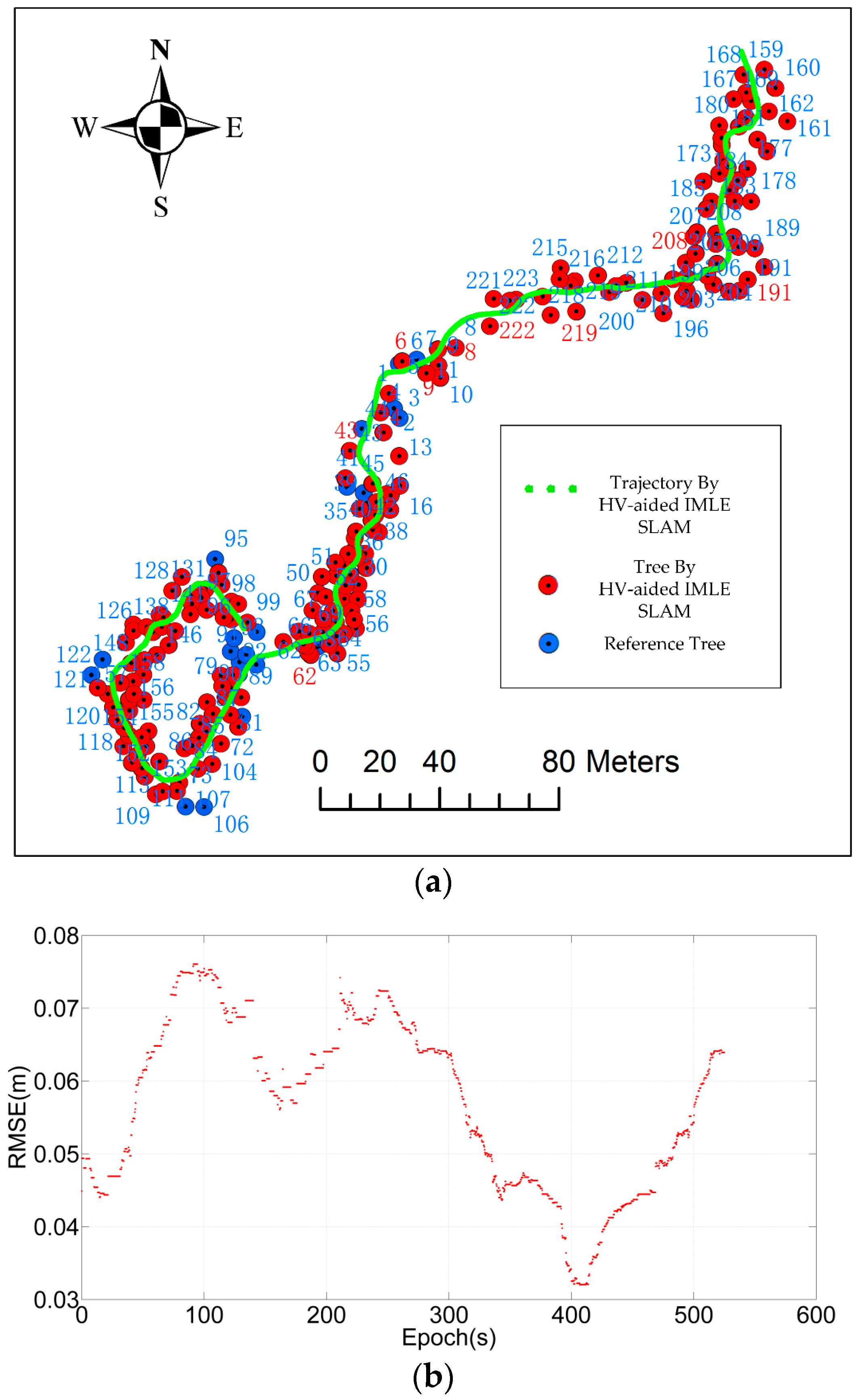
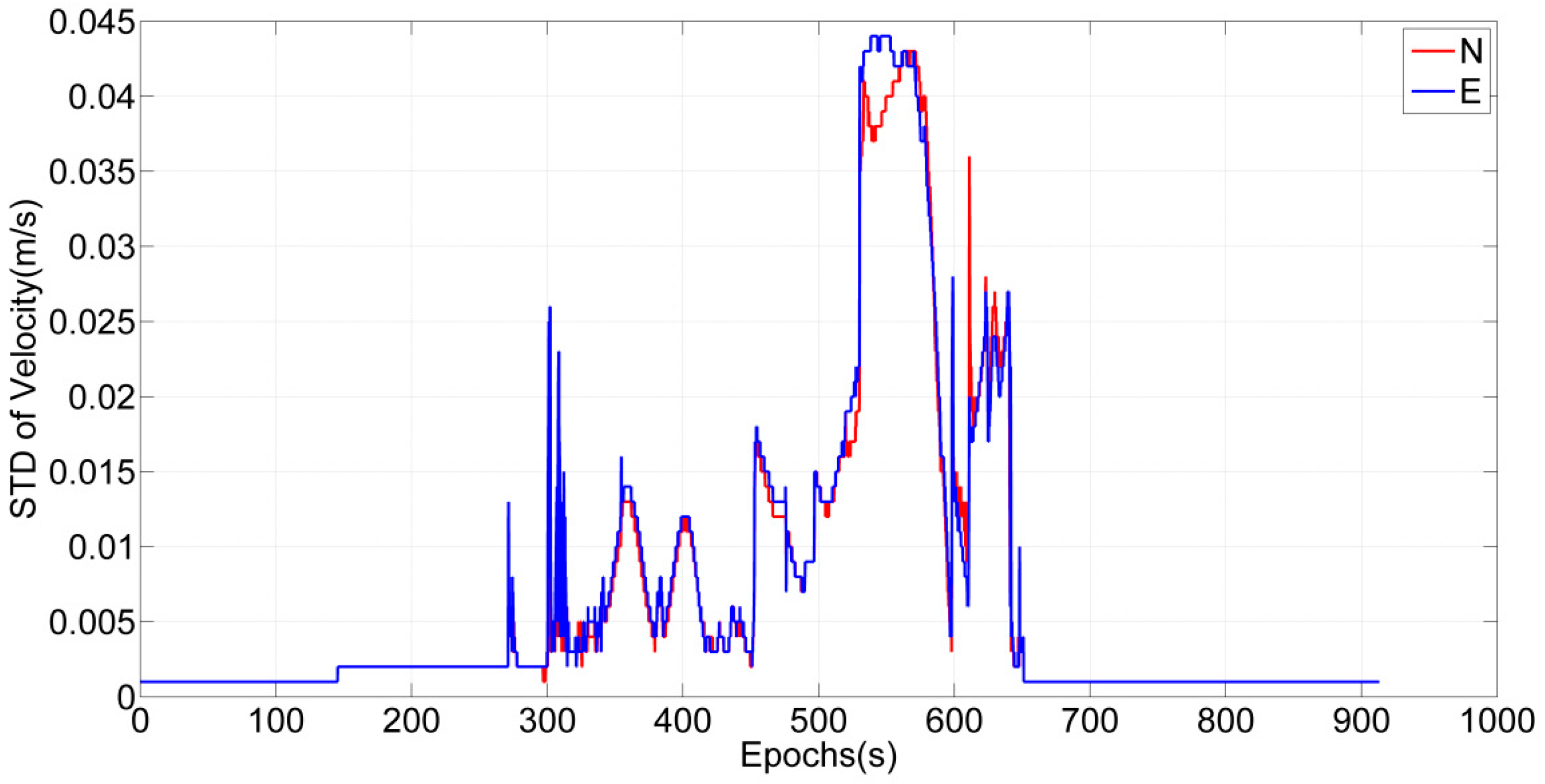
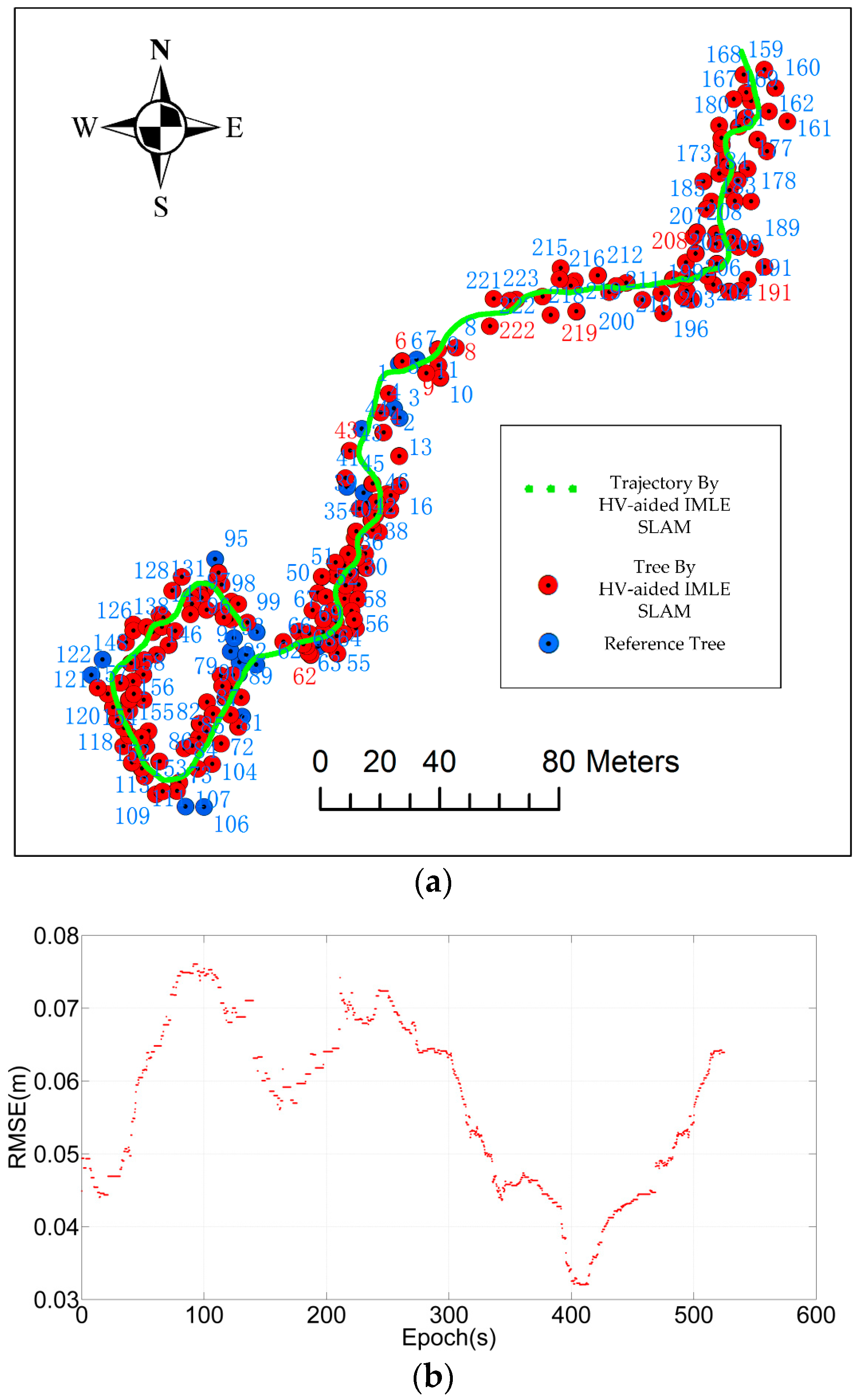
4.3. Result of IMLE-SLAM Method Aided by Heading Angle and Velocity
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Hyyppä, J.; Holopainen, M.; Olsson, H. Laser scanning in forests. Remote Sens. 2012, 4, 2919–2922. [Google Scholar] [CrossRef]
- Leeuwen, M.; Nieuwenhuis, M. Retrieval of forest structural parameters using LiDAR remote sensing. Eur. J. For. Res. 2010, 129, 749–770. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Yu, X.; Jaakkola, A.; Wang, Y. Possibilities of a personal laser scanning system for forest mapping and ecosystem services. Sensors 2014, 14, 1228–1248. [Google Scholar] [CrossRef] [PubMed]
- Rutzinger, M.; Pratihast, A.K.; Oude Elberink, S.; Vosselman, G. Detection and modelling of 3D trees from mobile laser scanning data. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 520–525. [Google Scholar]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; et al. Tree mapping using airborne, terrestrial and mobile laser scanning—A case study in a heterogeneous urban forest. Urban For. Urban Green. 2013, 12, 546–553. [Google Scholar] [CrossRef]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform mobile laser scanning: Usability and performance. Sensors 2012, 12, 11712–11733. [Google Scholar] [CrossRef]
- Bauwens, S.; Bartholomeus, H.; Calders, K.; Lejeune, P. Forest inventory with terrestrial LiDAR: A comparison of static and hand-held mobile laser scanning. Forests 2016, 7, 127. [Google Scholar] [CrossRef]
- Andersen, H.E.; Clarkin, T.; Winterberger, K.; Strunk, J. An accuracy assessment of positions obtained using survey-and recreational-grade global positioning system receivers across a range of forest conditions within the Tanana Valley of interior Alaska. West. J. Appl. For. 2009, 24, 128–136. [Google Scholar]
- Danskin, S.D.; Bettinger, P.; Jordan, T.R.; Cieszewski, C. A comparison of GPS performance in a Southern hardwood forest: Exploring low-cost solutions for forestry applications. South. J. Appl. For. 2009, 33, 9–16. [Google Scholar]
- Bakuła, M.; Oszczak, S.; Pelc-Mieczkowska, R. Performance of RTK positioning in forest conditions: Case study. J. Surv. Eng. 2009, 135, 125–130. [Google Scholar] [CrossRef]
- Bakula, M.; Przestrzelski, P.; Kazmierczak, R. Reliable technology of centimeter GPS/GLONASS surveying in forest environments. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1029–1038. [Google Scholar] [CrossRef]
- Tachiki, Y.; Yoshimura, T.; Hasegawa, H.; Mita, T.; Sakai, T.; Nakamura, F. Effects of polyline simplification of dynamic GPS data under forest canopy on area and perimeter estimations. J. For. Res. 2005, 10, 419–427. [Google Scholar] [CrossRef]
- Ucar, Z.; Bettinger, P.; Weaver, S.; Merry, K.L.; Faw, K. Dynamic accuracy of recreation-grade GPS receivers in Oak-hickory forests. Forestry 2014, 87, 504–511. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of kinematic positioning using global satellite navigation systems under forest canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Tang, J.; Chen, Y.; Kukko, A.; Kaartinen, H.; Jaakkola, A.; Khoramshahi, E.; Hakala, T.; Hyyppä, J.; Holopainen, M.; Hyyppä, H. SLAM-aided stem mapping for forest inventory with small-footprint mobile LiDAR. Forests 2015, 6, 4588–4606. [Google Scholar] [CrossRef]
- Ringdahl, O.; Hohnloser, P.; Hellström, T.; Holmgren, J.; Lindroos, O. Enhanced algorithms for estimating tree trunk diameter using 2D laser scanner. Remote Sens. 2013, 5, 4839–4856. [Google Scholar] [CrossRef]
- Takashi, T.; Asano, A.; Mochizuki, T.; Kondou, S.; Shiozawa, K.; Matsumoto, M.; Tomimura, S.; Nakanishi, S.; Mochizuki, A.; Chiba, Y.; et al. Forest 3D mapping and tree sizes measurement for forest management based on sensing technology for mobile robots. In Proceedings of the International Conference on Field and Service Robotics (FSR2012), Matsushima, Japan, 16–18 July 2012; pp. 357–368.
- Ding, X.; Yan, L.; Liu, J.; Kong, J.; Yu, Z. Obstacles detection algorithm in forest based on multi-sensor data fusion. J. Multimed. 2013, 8, 790–795. [Google Scholar] [CrossRef]
- Öhman, M.; Miettinen, M.; Kannas, K.; Jutila, J.; Visala, A.; Forsman, P. Tree measurement and simultaneous localization and mapping system for forest harvesters. In Proceedings of the International Conference on Field and Service Robotics (FSR2007), Chamonix, France, 9–12 July 2007; pp. 369–378.
- Miettinen, M.; Ohman, M.; Visala, A.; Forsman, P. Simultaneous localization and mapping for forest harvesters. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA2007), Roma, Italy, 10–14 April 2007; pp. 517–522.
- Chen, Y.; Tang, J.; Hyyppä, J.; Holopainen, M.; Liang, X.; Liu, J.; Chen, L.; Hakala, T.; Litkey, P.; Niu, X.; et al. Automated stem mapping using slam technology for plot-wise forest inventory. In Proceedings of the Ubiquitous Positioning Indoor Navigation and Location-Based Services(UPINLBS2014), Corpus Christi, TX, USA, 20–21 November 2014; pp. 130–134.
- Guivant, J.; Nebot, E. Improving computational and memory requirements of simultaneous localization and map building algorithms. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA2002), Washington, DC, USA, 11–15 May 2002; pp. 2731–2736.
- Ryding, J.; Williams, E.; Smith, M.J.; Eichhorn, M.P. Assessing handheld mobile laser scanners for forest surveys. Remote Sens. 2015, 7, 1095–1111. [Google Scholar] [CrossRef]
- Godha, S. Performance Evaluation of Low Cost MEMS-based IMU Integrated with GPS for Land Vehicle Navigation Application. Master’s Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, February 2006. [Google Scholar]
- Petovello, M.G. Real-Time Integration of A Tactical-Grade IMU and GPS for High-Accuracy Positioning and Navigation. Ph.D. Thesis, Department of Geomatics Engineering, University of Calgary, Calgary, AB, Canada, April 2003. [Google Scholar]
- Kennedy, S.; Hamilton, J.; Martell, H. Architecture and system performance of SPAN NovAtel’s GPS/INS solution. In Proceedings of the ION PLANS 2006, San Diego, CA, USA, 25–27 April 2006; pp. 23–25.
- Bailey, T.; Durrant-Whyte, H. Simultaneous localization and mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Li, L.; Yao, J.; Xie, R.; Tu, J.; Feng, C. Laser-based SLAM with efficient occupancy likelihood map learning for dynamic indoor scenes. In Proceedings of the ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences (ISPRS Annals), Prague, Czech Republic, 12–19 July 2016; pp. 119–126.
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. IEEE Trans. Pattern Anal. Mach. Intell. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Diosi, A.; Kleeman, L. Laser scan matching in polar coordinates with application to SLAM. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS2005), Edmonton, AB, Canada, 2–6 August 2005; pp. 3317–3322.
- Censi, A. An ICP variant using a point-to-line metric. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA2008), Pasadena, CA, USA, 19–23 May 2008; pp. 19–25.
- Tang, J.; Chen, Y.; Jaakkola, A.; Liu, J.; Hyyppä, J.; Hyyppä, H. NAVIS—An UGV indoor positioning system using laser scan matching for large-area real-time applications. Sensors 2014, 14, 11805–11824. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Niu, X.; Chen, Q.; Zhang, H.; Shi, C. Using allan variance to evaluate the relative accuracy on different time scales of GNSS/INS systems. Meas. Sci. Technol. 2013, 24, 085006. [Google Scholar] [CrossRef]
- Tang, J.; Chen, Y.; Niu, X.; Wang, L.; Chen, L.; Liu, J.; Shi, C.; Hyyppä, J. LiDAR scan matching aided inertial navigation system in GPS denied environments. Sensors 2015, 15, 16710–16728. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RMSE (m) | EASTING | NORTHING | 2D |
|---|---|---|---|
| GNSS/INS | 0.36 | 0.23 | 0.43 |
| IMLE-SLAM | 8.73 | 6.82 | 11.07 |
| RMSE (m) | EASTING | NORTHING | 2D |
|---|---|---|---|
| GNSS/INS | 0.29 | 0.17 | 0.34 |
| IMLE-SLAM | 0.17 | 0.08 | 0.19 |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, C.; Liu, H.; Tang, J.; Chen, Y.; Kaartinen, H.; Kukko, A.; Zhu, L.; Liang, X.; Chen, L.; Hyyppä, J. An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping. Remote Sens. 2017, 9, 3. https://doi.org/10.3390/rs9010003
Qian C, Liu H, Tang J, Chen Y, Kaartinen H, Kukko A, Zhu L, Liang X, Chen L, Hyyppä J. An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping. Remote Sensing. 2017; 9(1):3. https://doi.org/10.3390/rs9010003
Chicago/Turabian StyleQian, Chuang, Hui Liu, Jian Tang, Yuwei Chen, Harri Kaartinen, Antero Kukko, Lingli Zhu, Xinlian Liang, Liang Chen, and Juha Hyyppä. 2017. "An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping" Remote Sensing 9, no. 1: 3. https://doi.org/10.3390/rs9010003
APA StyleQian, C., Liu, H., Tang, J., Chen, Y., Kaartinen, H., Kukko, A., Zhu, L., Liang, X., Chen, L., & Hyyppä, J. (2017). An Integrated GNSS/INS/LiDAR-SLAM Positioning Method for Highly Accurate Forest Stem Mapping. Remote Sensing, 9(1), 3. https://doi.org/10.3390/rs9010003