
Wavelet Based Analysis of TanDEM-X and LiDAR DEMs across a Tropical Vegetation Heterogeneity Gradient Driven by Fire Disturbance in Indonesia


Abstract
:
1. Introduction
1.1. Forest Structural Heterogeneity Derived from Remote Sensing
1.2. Rationale
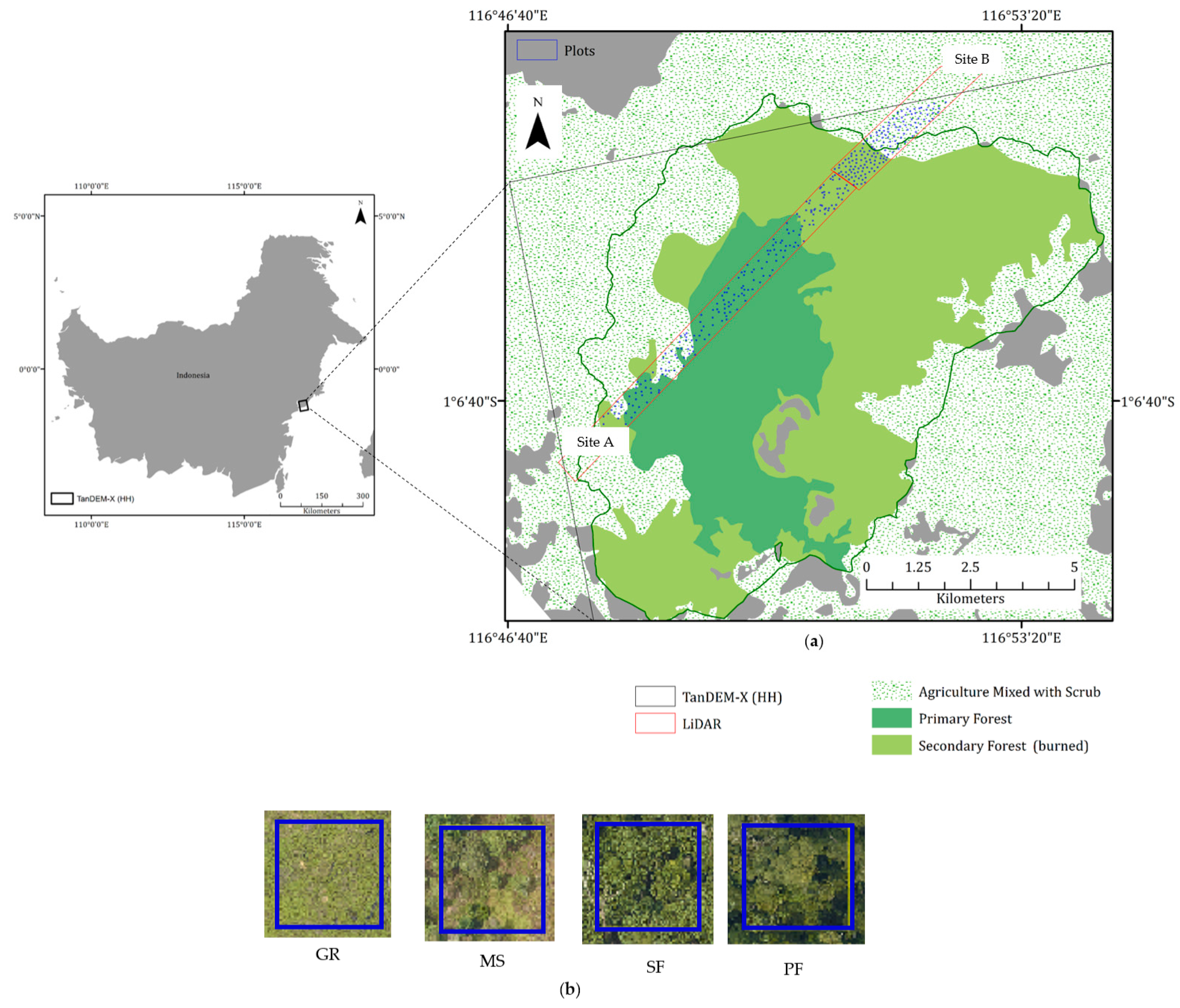
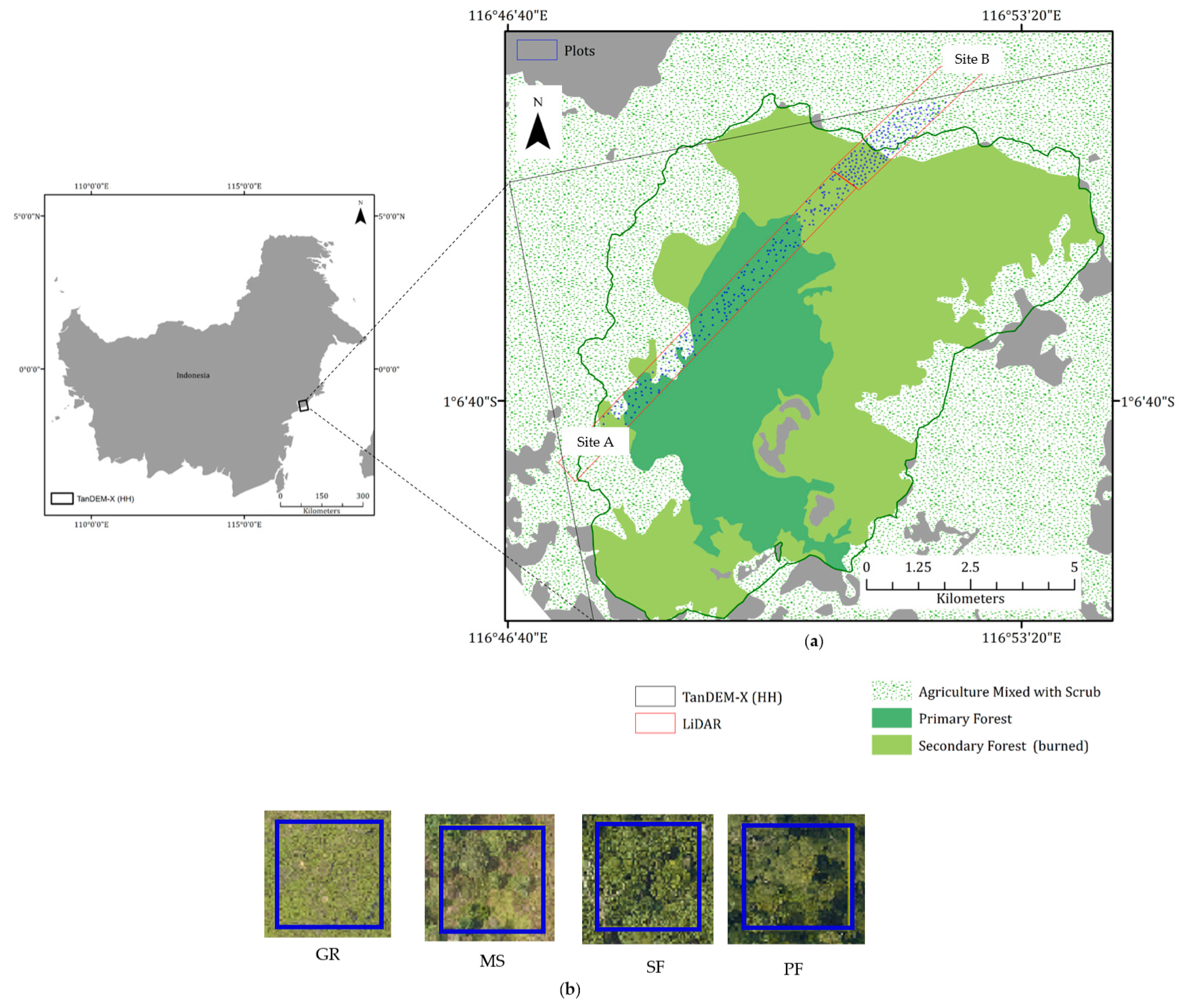
2. Study Site: Sungai Wain Protection Forest (SWPF), East Kalimantan (Indonesia)
3. Methods
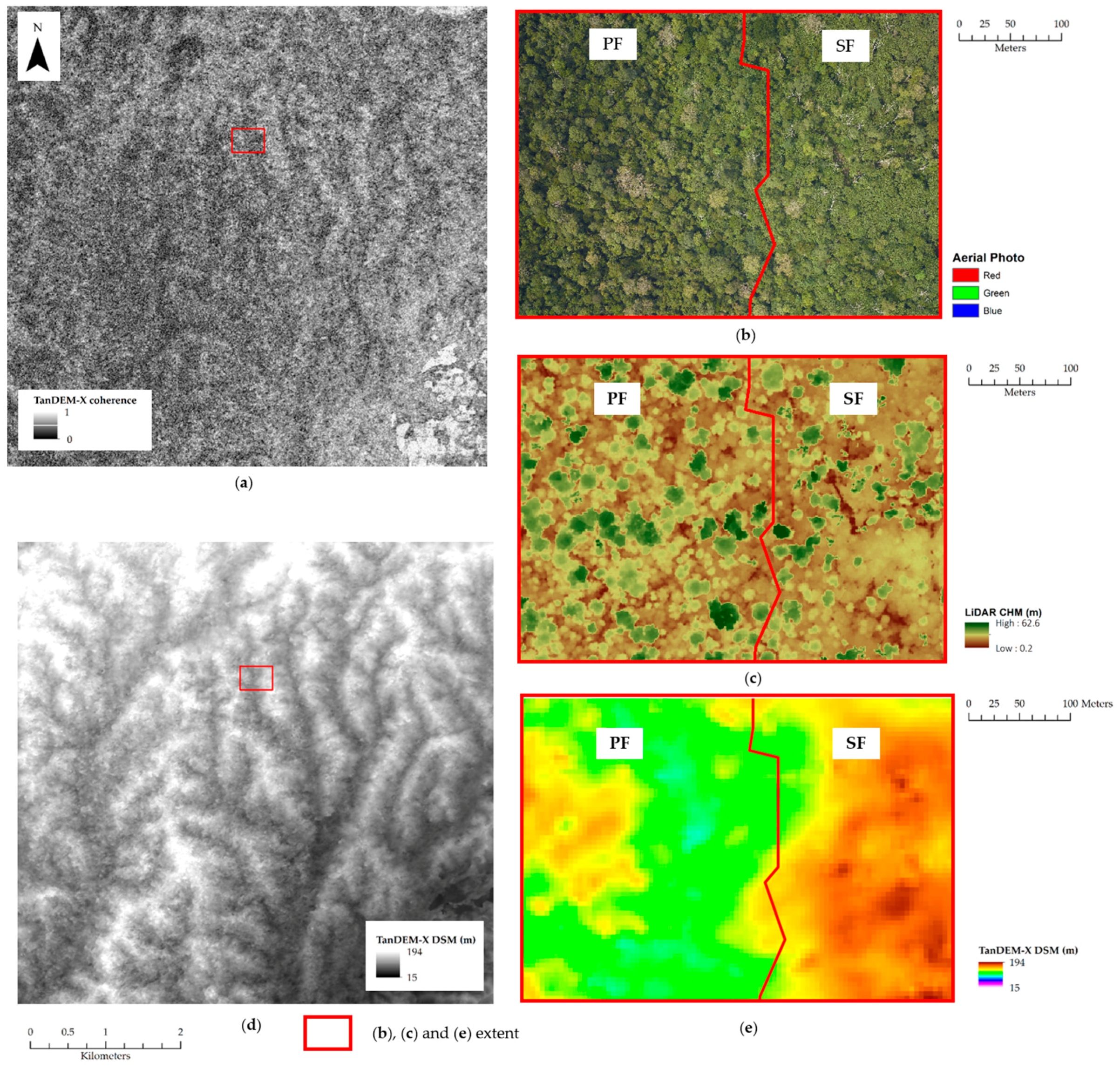
3.1. TanDEM-X Data
3.2. Reference Datasets
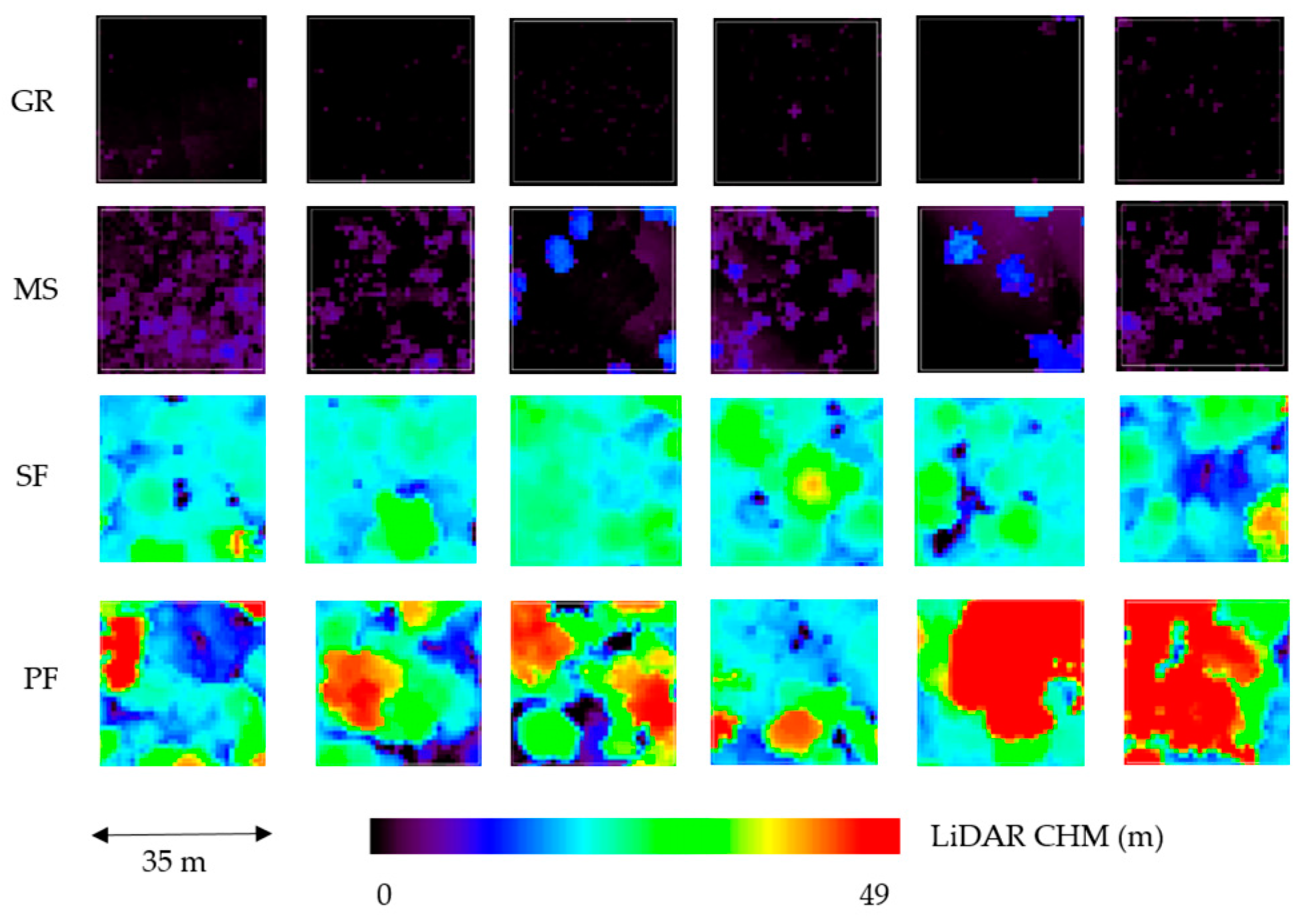
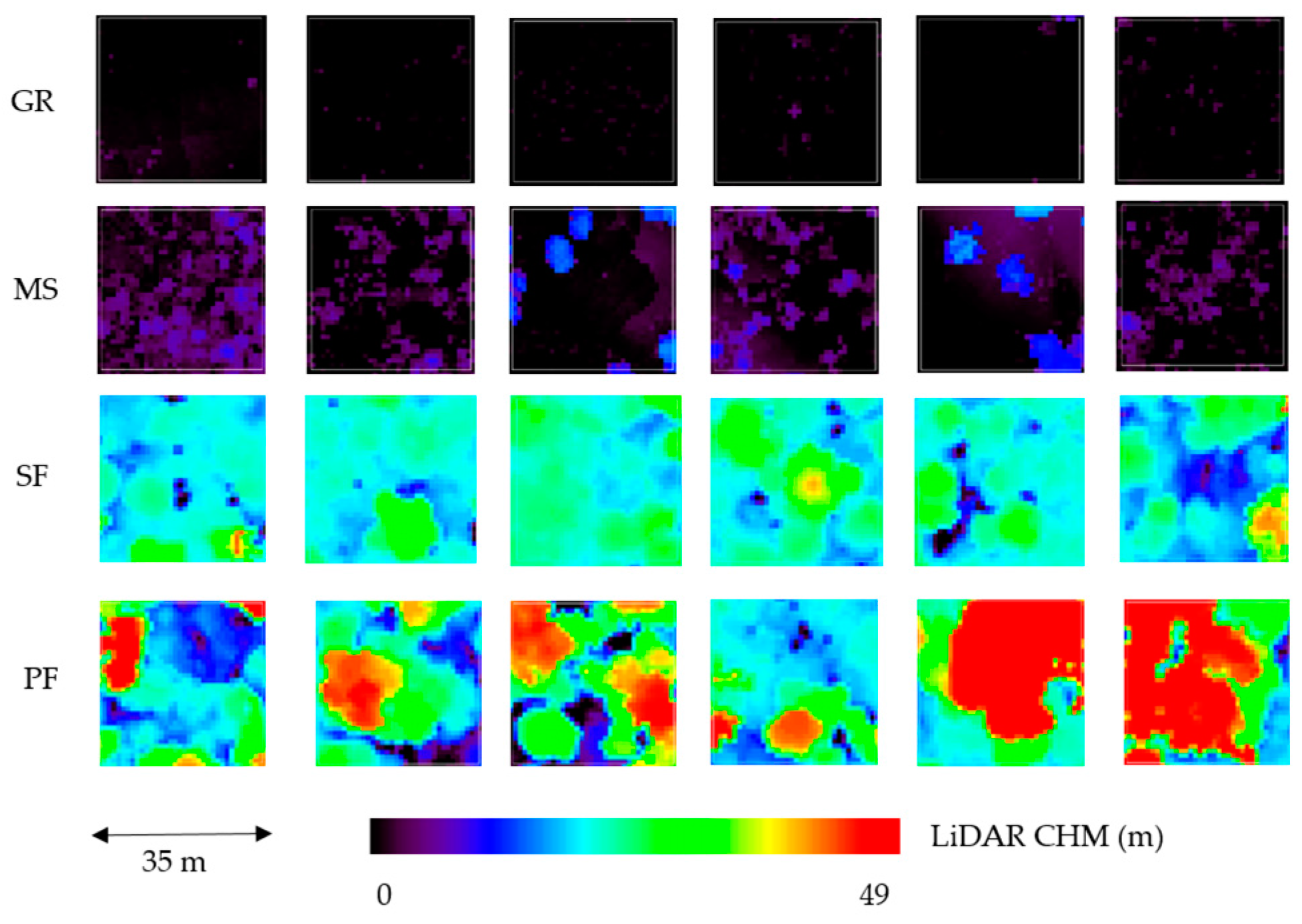
3.3. Vegetation Structural Class Selection
3.4. LiDAR and TanDEM-X Texture Correlation Analysis to Assess Impact of Topographic and Canopy Structures
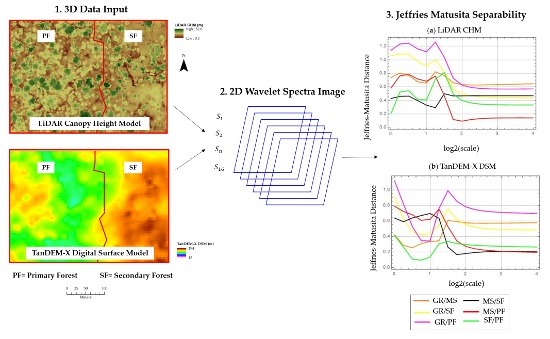
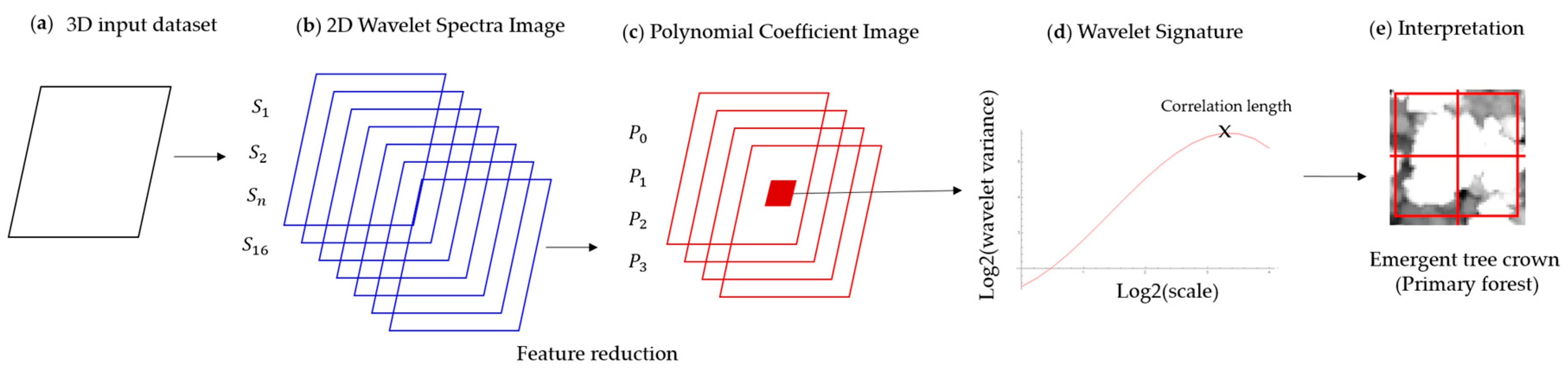
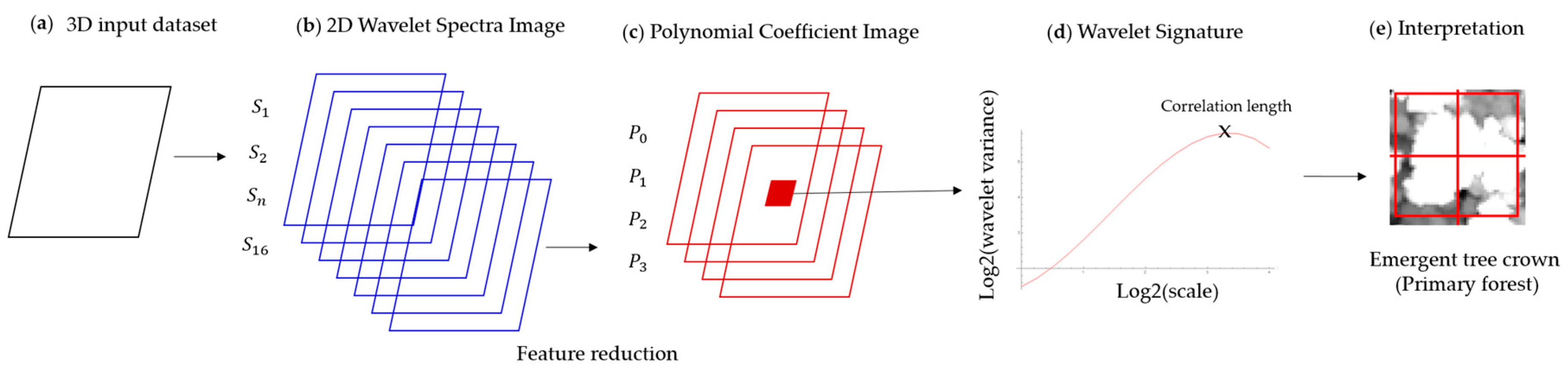
3.5. 2D Wavelet Spectra
3.6. Separability
4. Results and Interpretation
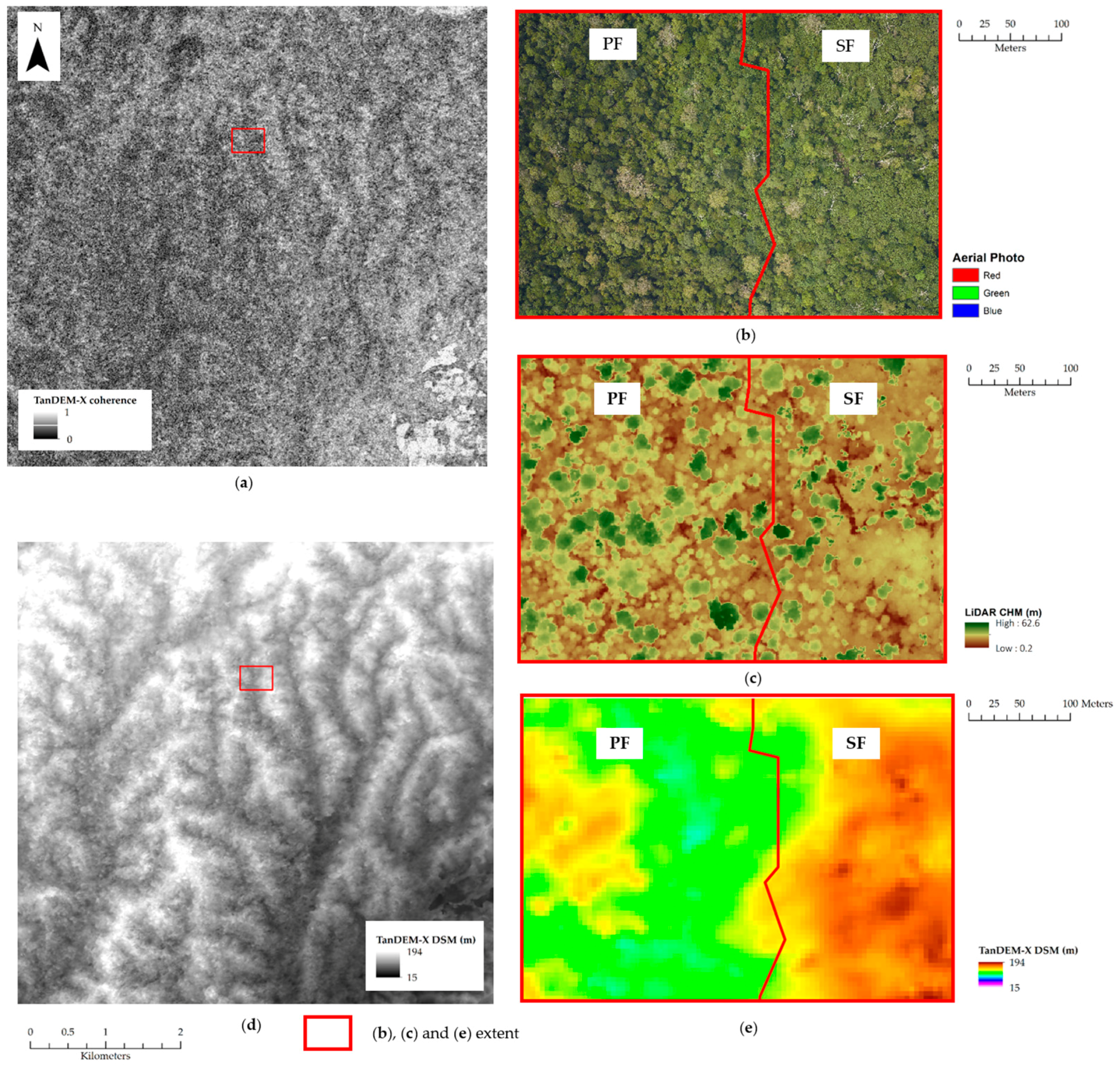
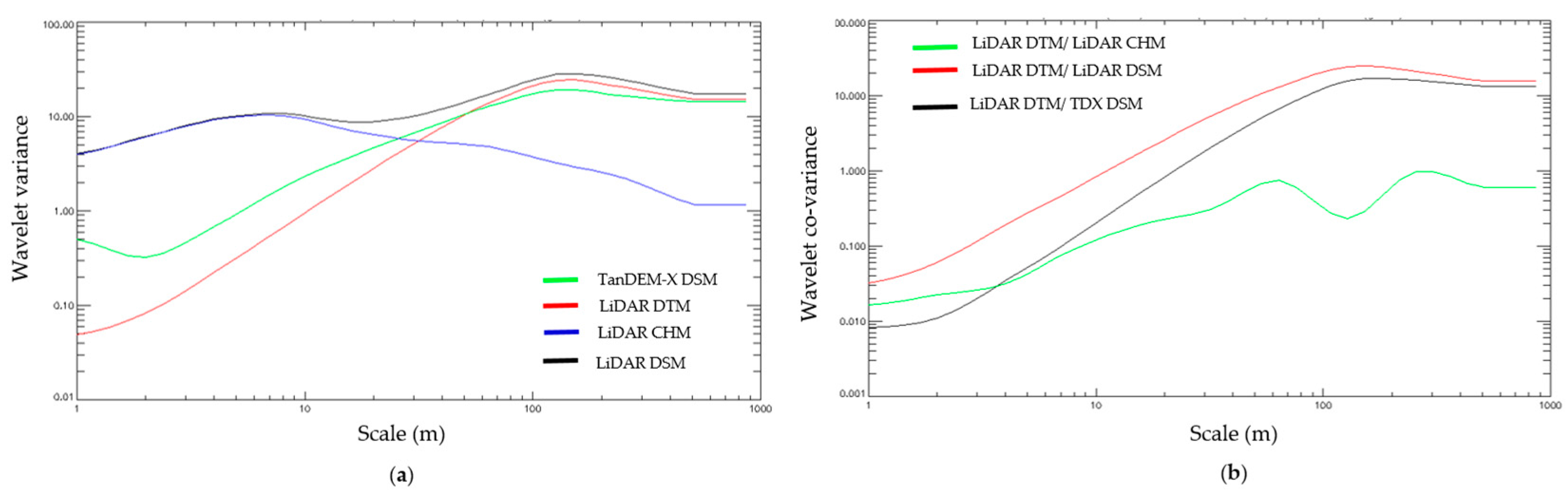
4.1. LiDAR and TanDEM-X Textural Correlation Anaysis to Assess Coupling of Topographic and Canopy Structures
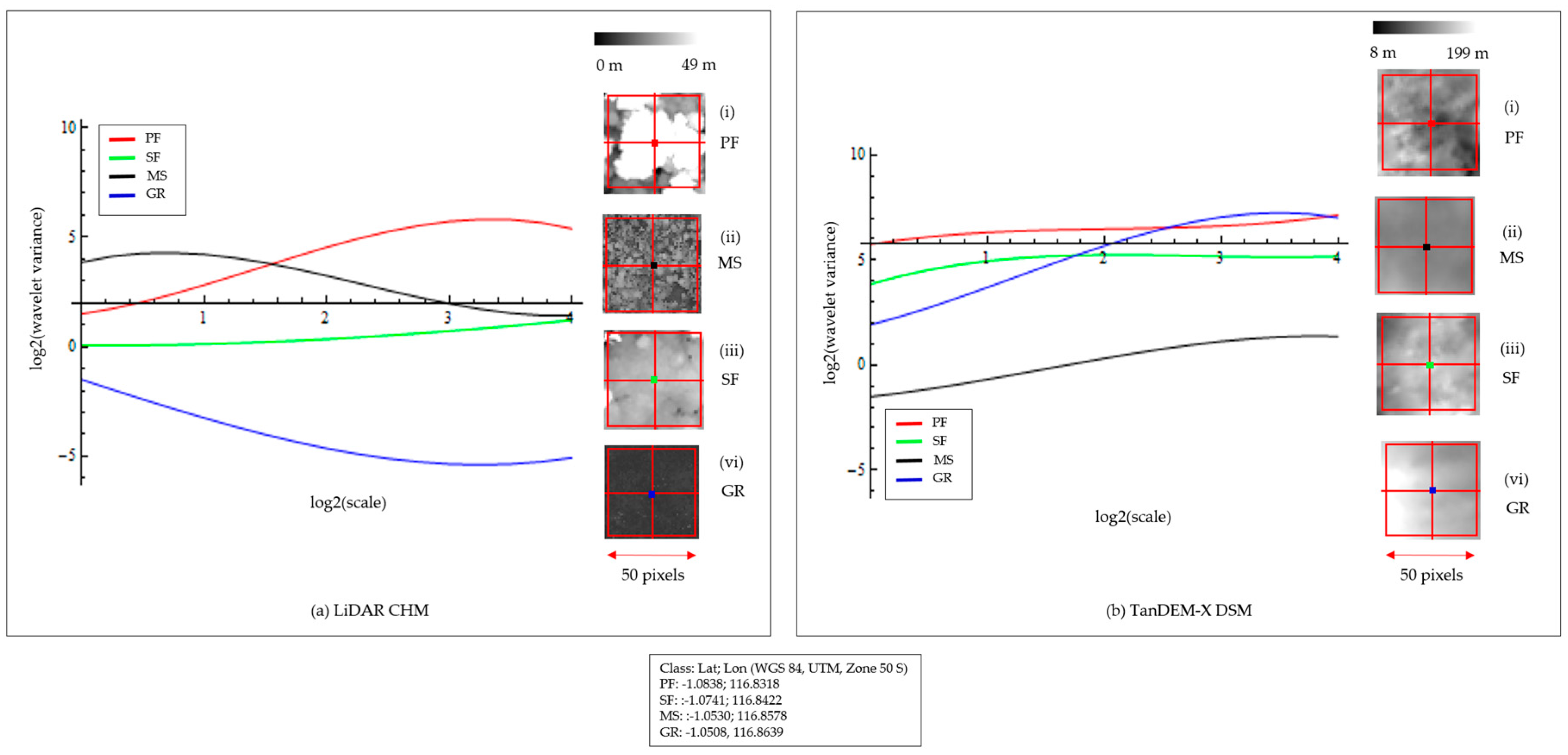
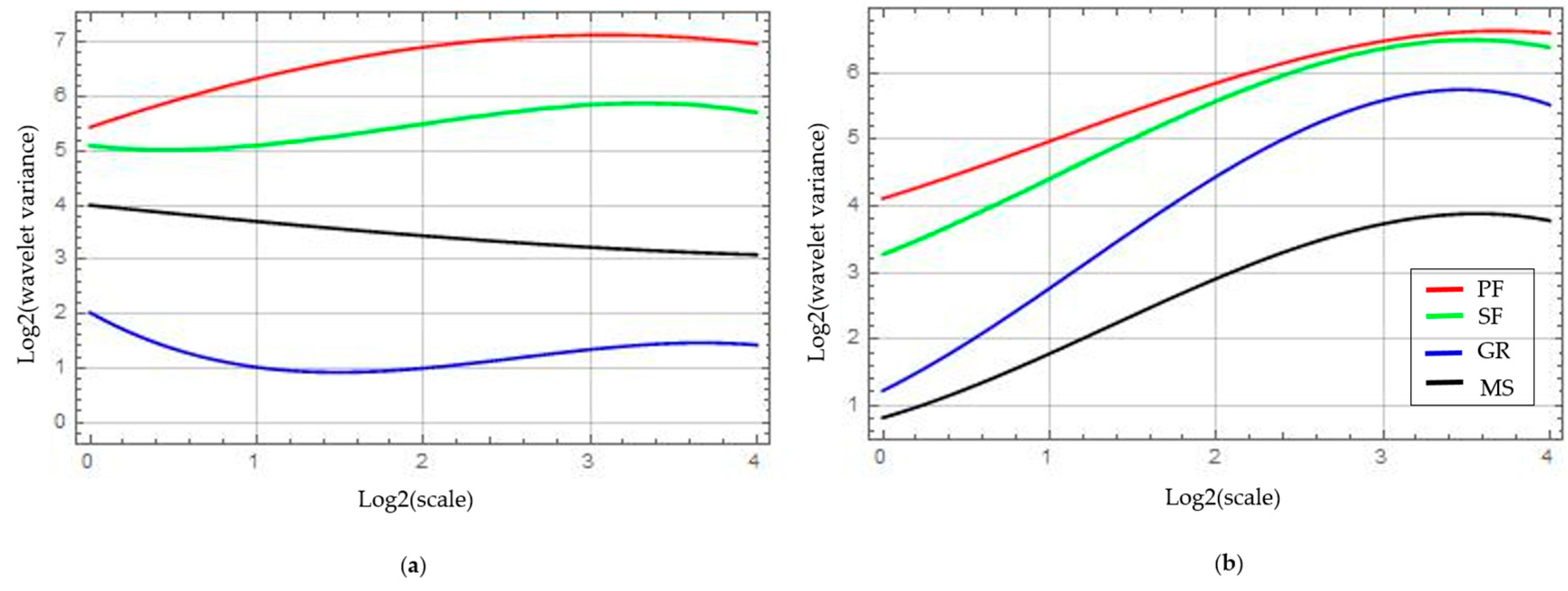
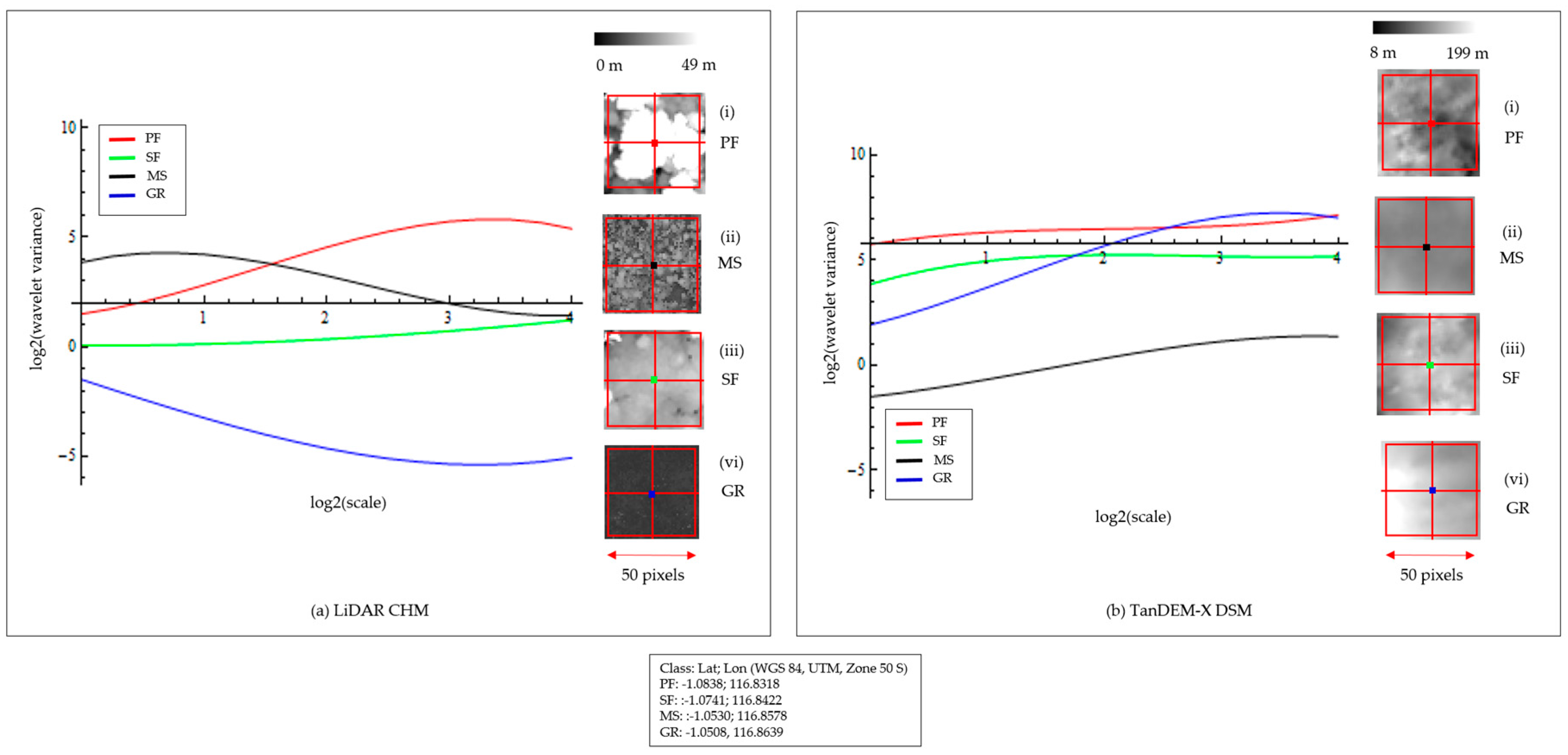
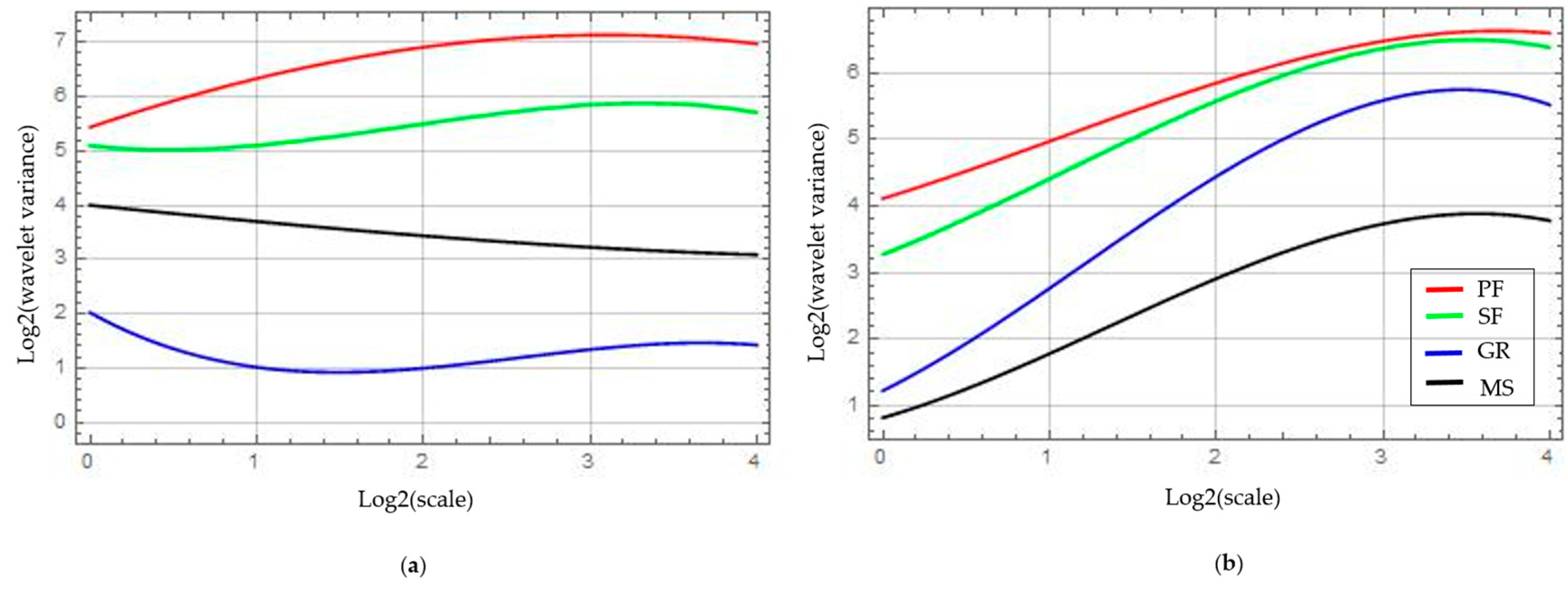
4.2. Canopy Structural Heterogeneity Based on 2D Wavelet Spectra
4.3. Interpretation of Wavelet Measures of Structural Heterogeneity Based on Height Variance
4.3.1. Wavelet Signatures Polynomial Fit
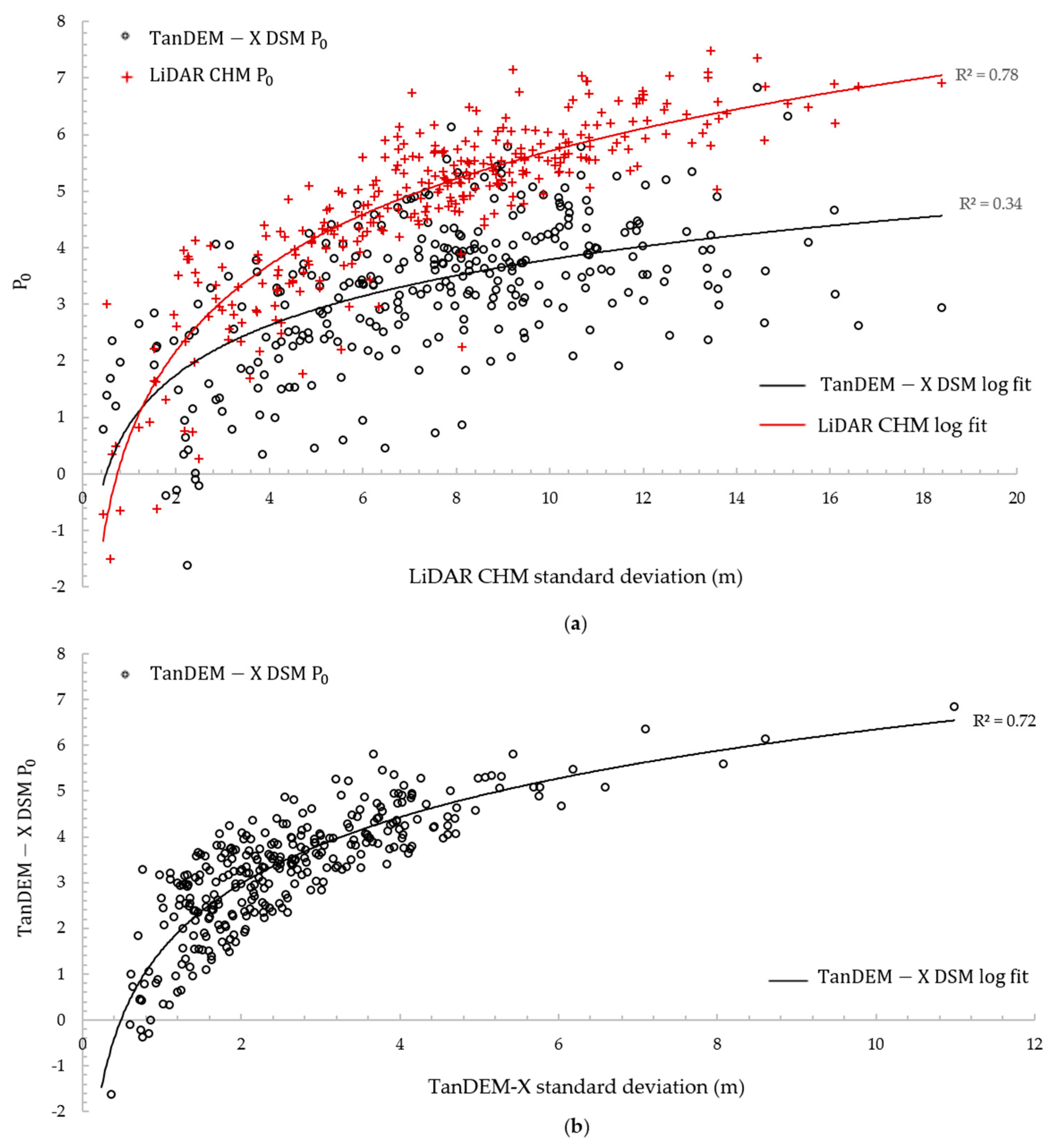
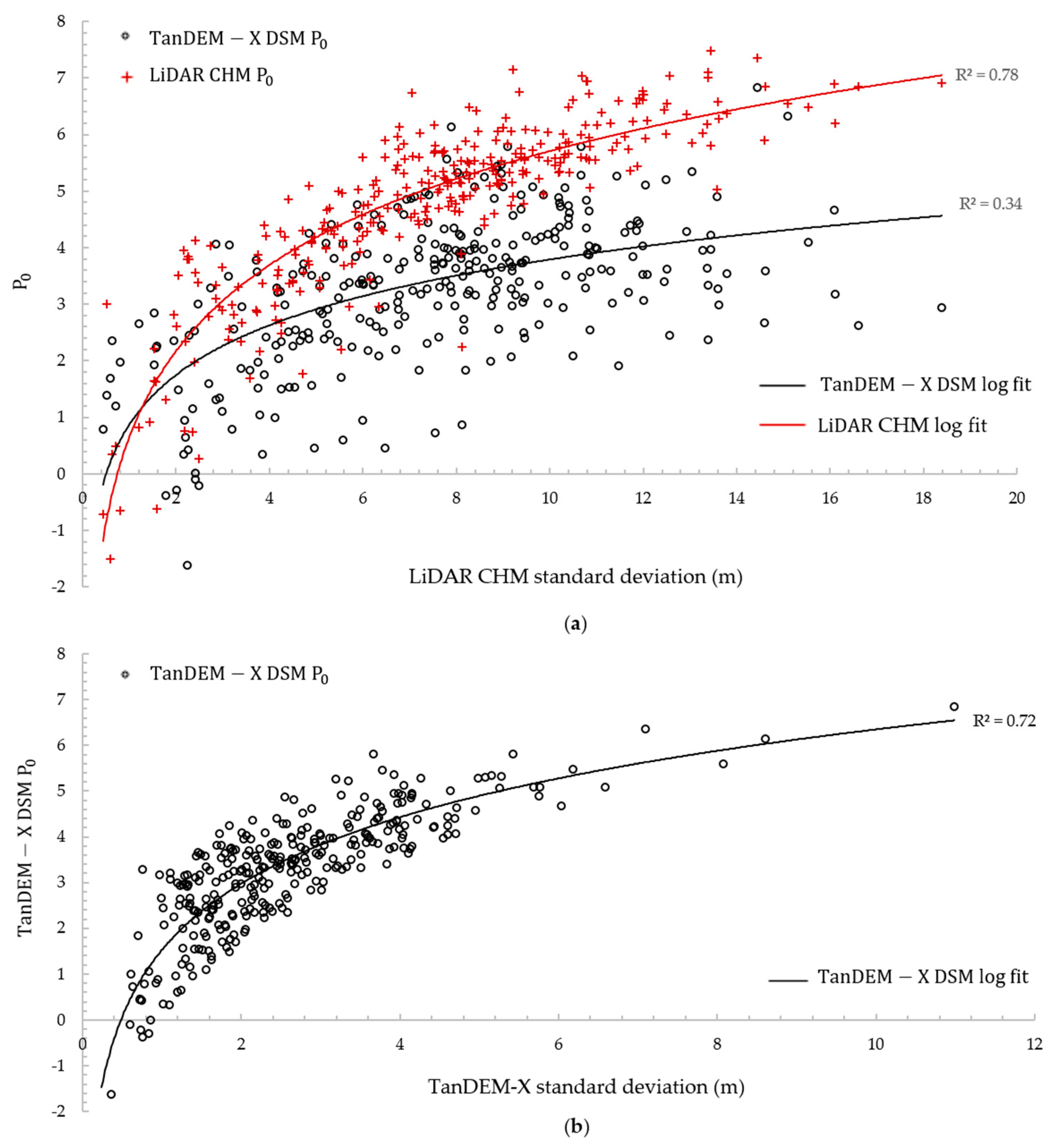
4.3.2. Regression Analysis
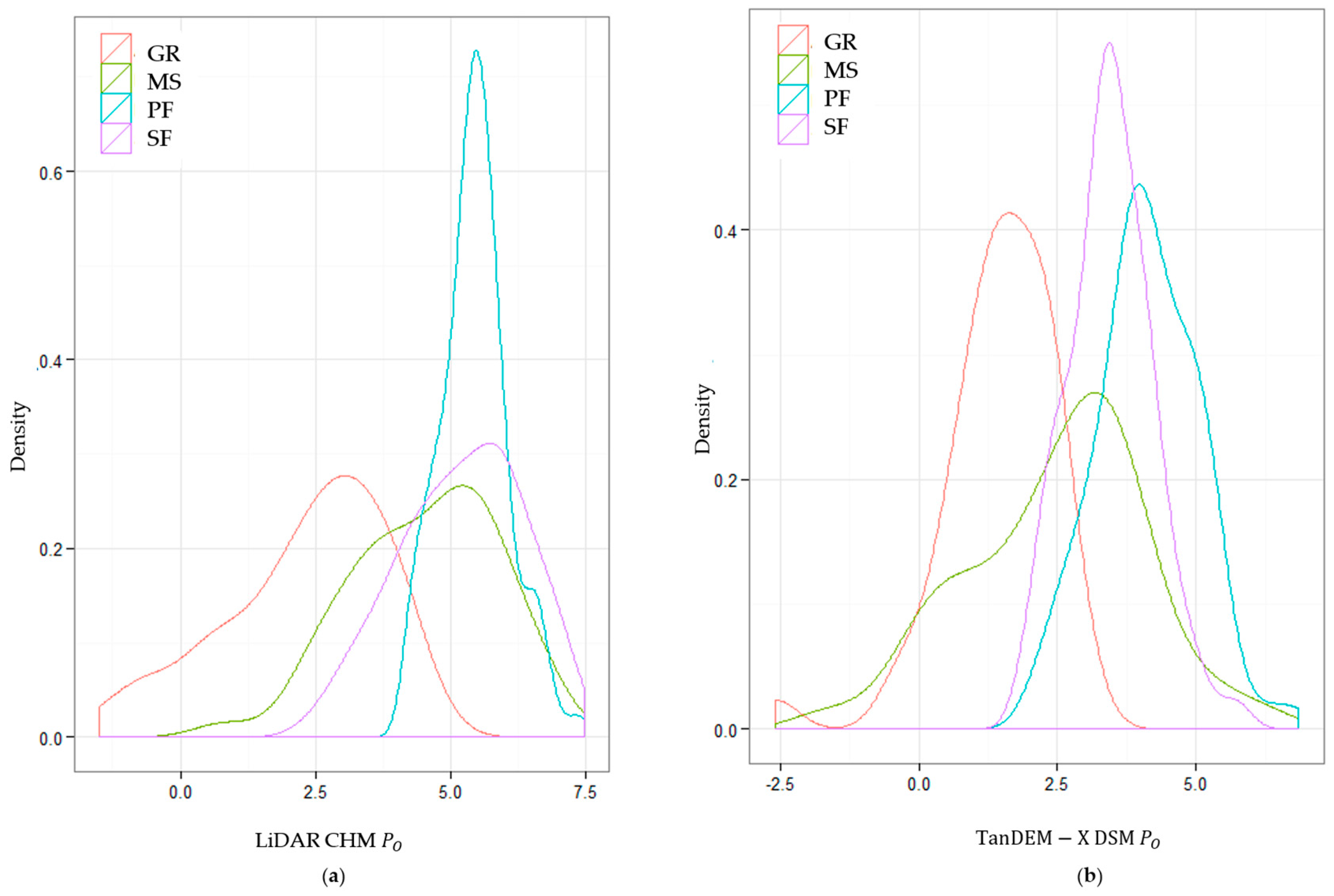
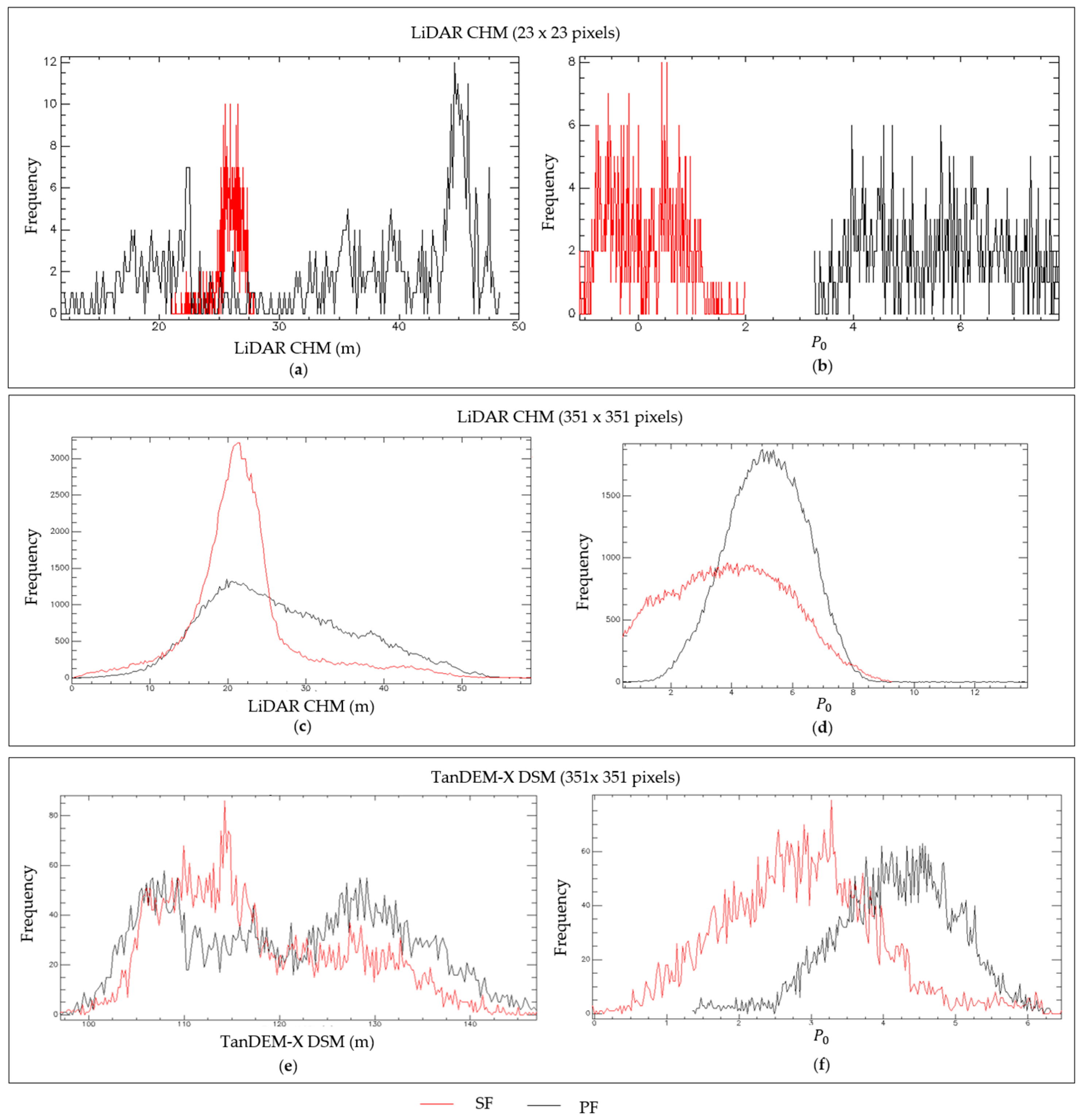
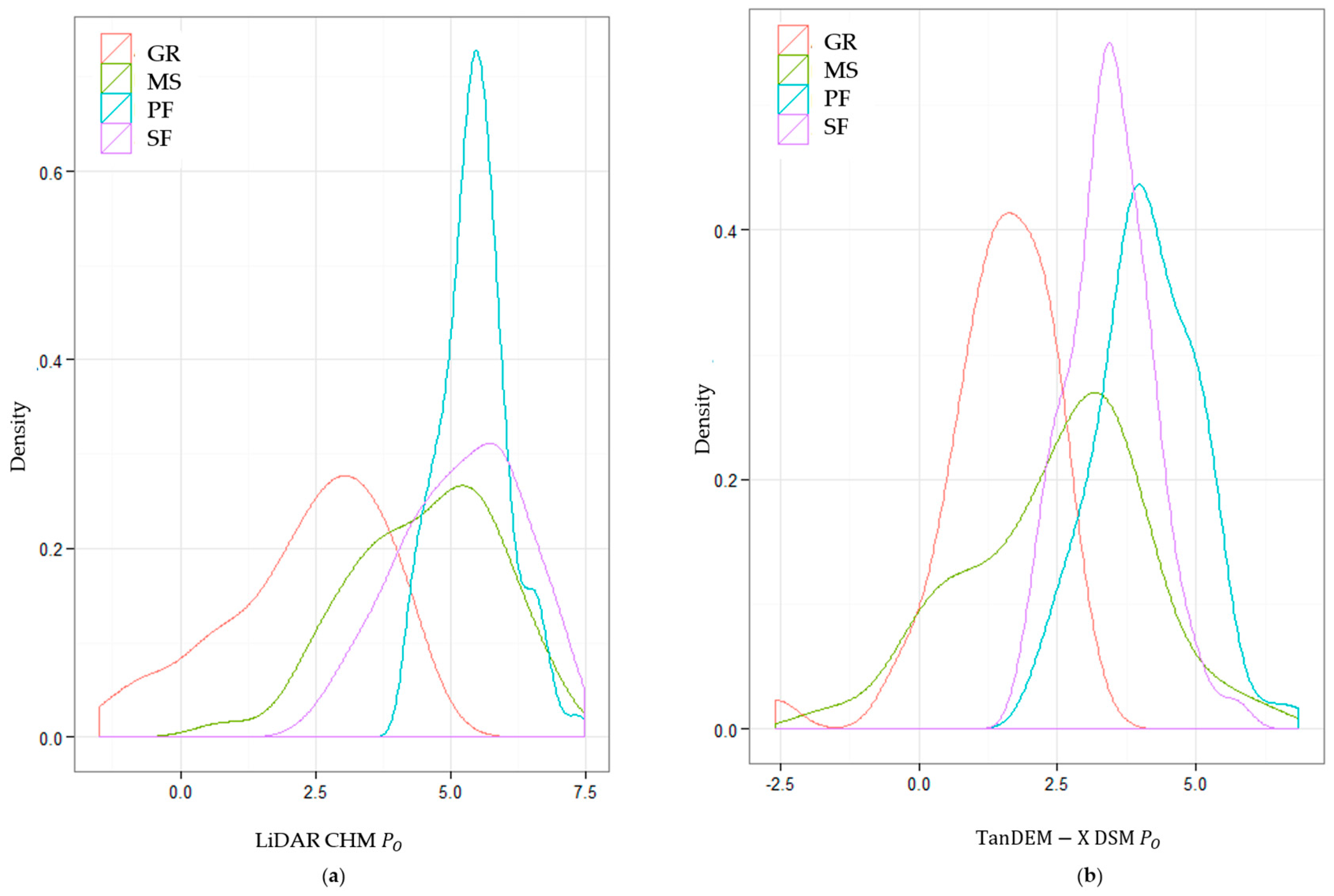
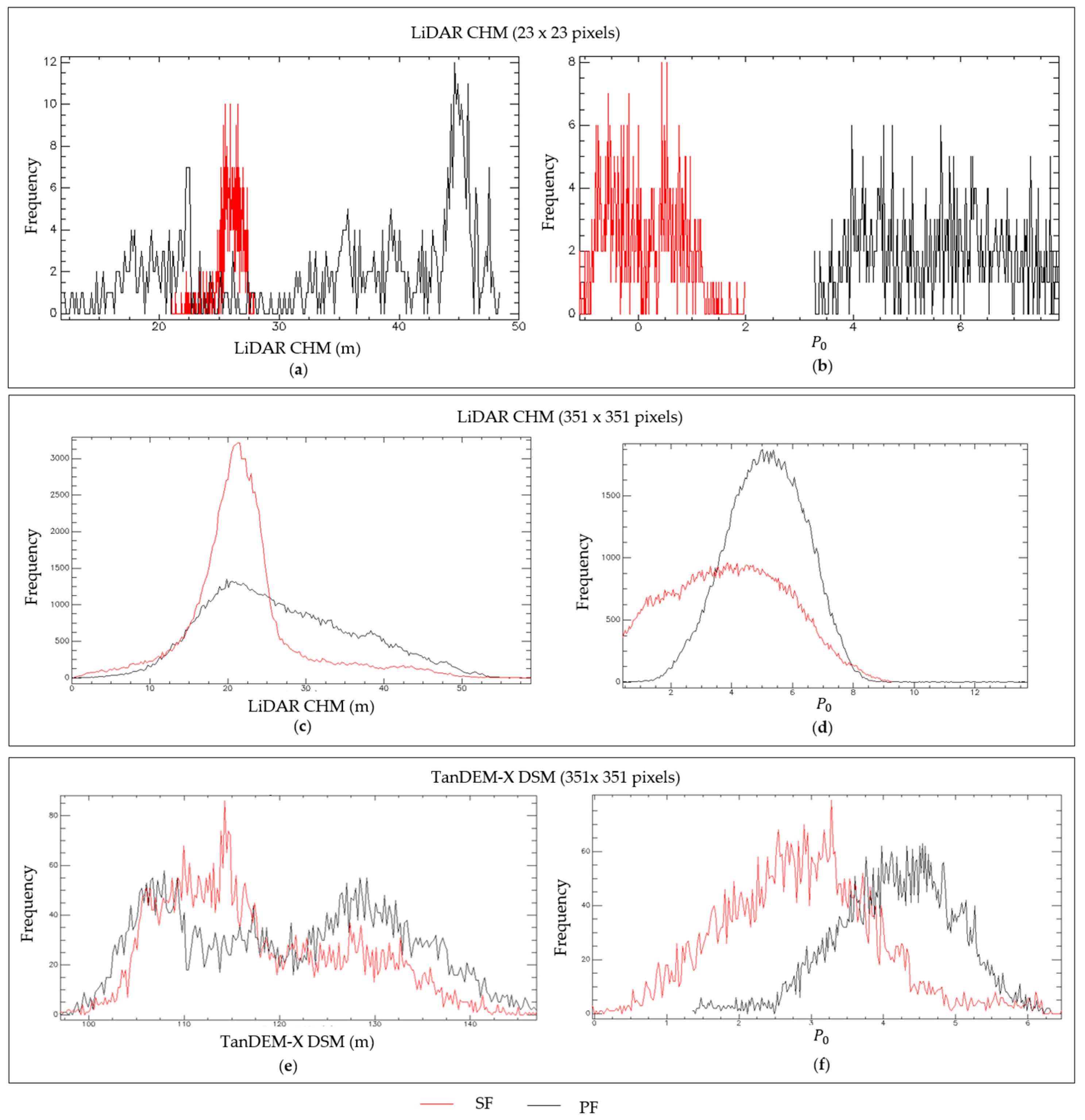
4.3.3. LiDAR CHM and TanDEM-X Polynomial Coefficients and Standard Deviation Frequency Distributions
4.4. LiDAR CHM and TanDEM-X DSM 2D Wavelet Spectra Class Separability
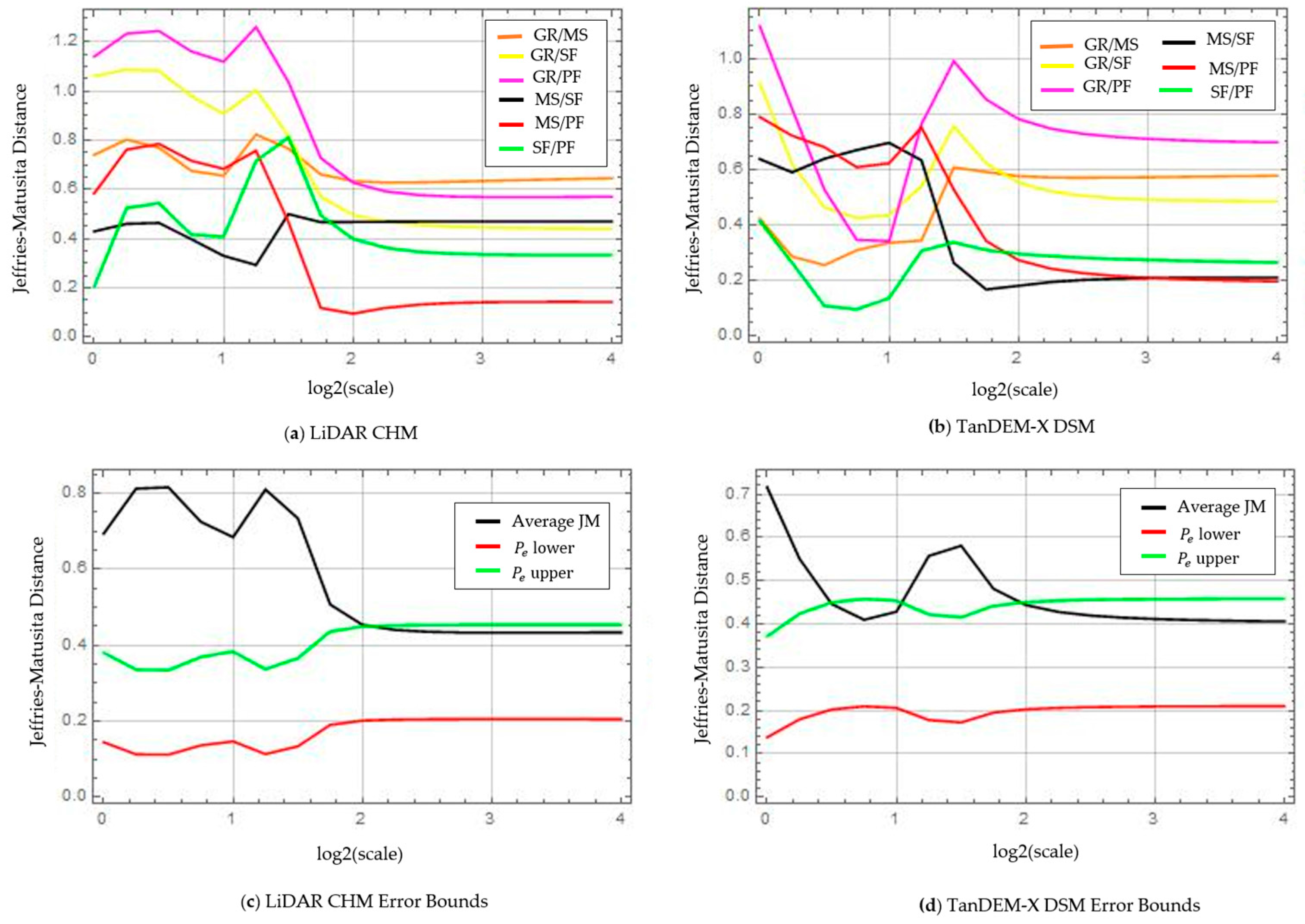
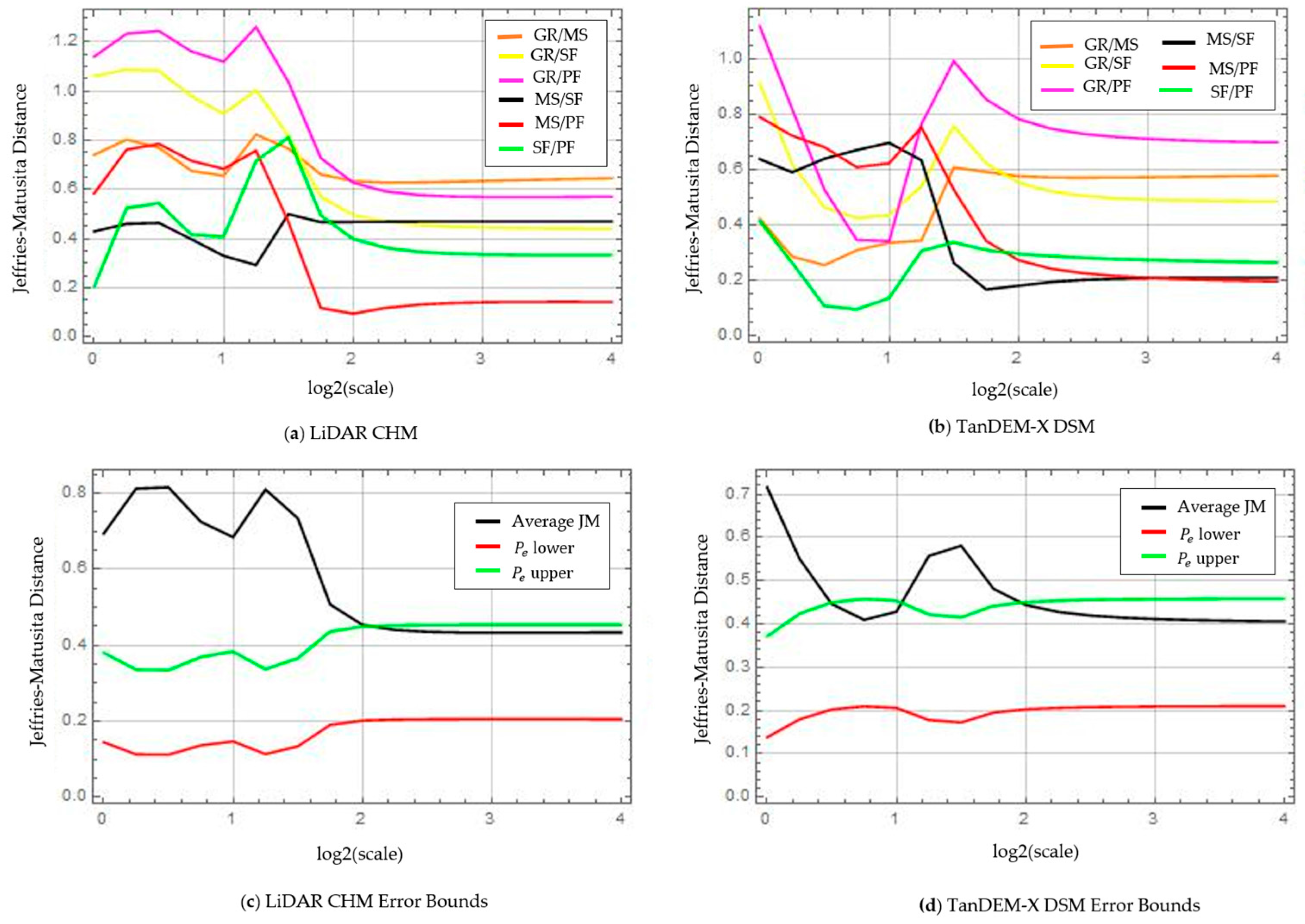
4.4.1. Scale by Scale Class Separability
4.4.2. Full Wavelet Signature (WS) Class Separability
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| ENSO | El Niño Southern Oscillation |
| CHM | Canopy Height Model |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| DEM | Digital Elevation Model |
| FOTO | Fourier Transform Textural Ordination |
| GR | Grassland |
| InSAR | Interferometric Synthetic Aperture Radar |
| JM | Jeffries–Matusita |
| LiDAR | Light Detection and Ranging |
| MS | Mixed scrub |
| PD | Probability Density |
| PF | Primary Forest |
| First wavelet Polynomial Coefficient | |
| Probability Error | |
| SAR | Synthetic Aperture Radar |
| SF | Secondary forest |
| TDX | TanDEM-X |
| VV | Vertical Send Vertical Receive |
| WS | Wavelet Spectra |
References
- Grace, J.; Mitchard, E.; Gloor, E. Perturbations in the carbon budget of the tropics. Glob. Chang. Biol. 2014, 20, 3238–3255. [Google Scholar] [PubMed]
- Pan, Y.; Birdsey, R.A.; Fang, J.; Houghton, R.; Kauppi, P.E.; Kurz, W.A.; Phillips, O.L.; Shvidenko, A.; Lewis, S.L.; Canadell, J.G.; et al. A large and persistent carbon sink in the world’s forests. Science 2011, 333, 988–993. [Google Scholar] [PubMed]
- Mitchard, E.T.A.; Feldpausch, T.R.; Brienen, R.J.W.; Lopez-Gonzalez, G.; Monteagudo, A.; Baker, T.R.; Lewis, S.L.; Lloyd, J.; Quesada, C.A.; Gloor, M.; et al. Markedly divergent estimates of Amazon forest carbon density from ground plots and satellites. Glob. Ecol. Biogeogr. 2014, 23, 935–946. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- ITTO Guidelines for the Restoration, Management and Rehabilitation of Degraded and Secondary Tropical Forests. Available online: http://www.itto.int/direct/topics/topics_pdf_download/topics_id=1540000&no=1&disp=inline (accessed on 11 November 2015).
- Harris, N.L.; Brown, S.; Hagen, S.C.; Saatchi, S.S.; Petrova, S.; Salas, W.; Hansen, M.C.; Popatov, P.V.; Lotsch, A. Baseline map of carbon emissions from deforestation in tropical regions. Science 2012, 336, 1573–1576. [Google Scholar] [CrossRef] [PubMed]
- Kartawinata, K.; Abdullhadi, R.; Partomihardjo, T. Composition and structure of a lowland dipterocarp forest at Wanariset, East Kalimantan. Malays. For. 1981, 44, 397–406. [Google Scholar]
- Potapov, P.; Yaroshenko, A.; Turubanova, S.; Dubinin, M.; Laestadius, L.; Thies, C.; Aksenov, D.; Egorov, A.; Yesipova, Y.; Glushkov, I.; et al. Mapping the world’s intact forest landscapes by remote sensing. Ecol. Soc. 2008, 13, 1–16. [Google Scholar]
- Mietten, J.; Stibig, H.J.; Achard, F. Remote sensing of forest degradation in Southeast Asia—Aiming for a regional view through 5–30 m satellite data. Global Ecol. Conserv. 2014, 2, 24–36. [Google Scholar] [CrossRef]
- Giam, X.; Clements, G.R.; Aziz, S.A.; Chong, K.Y. Rethinking the ‘back to wilderness’ concept for Sundaland’s forests. Biol. Conserv. 2011, 144, 3149–3152. [Google Scholar] [CrossRef]
- Lewis, S.L.; Edwards, D.P.; Galbraith, D. Increasing human dominance of tropical forests. Science 2015, 349, 827–832. [Google Scholar] [CrossRef] [PubMed]
- Berenguer, E.; Ferreira, J.; Gardner, T.; Oliveira Cruz Aragão, L.; Barbosa De Camargo, P.; Cerri, C.; Durigan, M.; De Oliveira, R.; Guimarães Vieira, I.; Barlow, J. A large-scale field assessment of carbon stocks in human-modified tropical forests. Glob. Chang. Biol. 2014, 20, 3713–3726. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- MacKinnon, K.; Hatta, G.; Halim, H.; Mangalik, A. The Ecology of Kalimantan, 1st ed.; Oxford University Press: Oxford, UK, 1997. [Google Scholar]
- Goldammer, H.G. Fire management in tropical forests. In Tropical Forestry Handbook, 2nd ed.; Pancel, L., Köhl, M., Eds.; Springer-Verlag: Berlin, Germany, 2015; pp. 1–42. [Google Scholar]
- Chisholm, R.A.; Wijedasa, L.S.; Swinfield, T. The need for long-term remedies for Indonesia’s forest fires. Conserv. Biol. Lett. 2016, 30, 5–6. [Google Scholar] [CrossRef] [PubMed]
- Cochrane, M. Fire science for rainforests. Nature 2003, 421, 913–919. [Google Scholar] [CrossRef] [PubMed]
- Siegert, F.; Ruecker, G.; Hinrichs, A.; Hoffmann, A. Increased damage from fires in logged forests during droughts caused by El Nino. Natl. Lett. 2001, 414, 437–440. [Google Scholar] [CrossRef] [PubMed]
- Gerwin, J. Degradation of forests through logging and fire in the eastern Brazilian Amazon. For. Ecol. Manag. 2002, 157, 131–141. [Google Scholar] [CrossRef]
- Cai, W.; Borlace, S.; Lengaigne, M.; van Rensch, P.; Collins, M.; Vecchi, G.; Timmermann, A.; Santoso, A.; McPhaden, M.J.; Wu, L.; et al. Increasing frequency of extreme El Niño events due to greenhouse warming. Nat. Clim. Chang. 2014, 4, 111–116. [Google Scholar] [CrossRef] [Green Version]
- Page, S.E.; Siegert, F.; Rieley, J.O.; Boehm, H.V.; Jaya, A.; Limin, S. The amount of carbon released from peat and forest fires in Indonesia during 1997. Nature 2002, 420, 61–65. [Google Scholar] [CrossRef] [PubMed]
- Jordan, C.F.; Farnworth, E.G. Natural vs. plantation forests: A case study of land reclamation strategies for the humid tropics. Environ. Manag. 1982, 6, 485–492. [Google Scholar] [CrossRef]
- Goldammer, J.G. Forests on fire. Science 1999, 284, 1782–1783. [Google Scholar] [CrossRef]
- Toma, T.; Ishida, A.; Matius, P. Long-term monitoring of post-fire aboveground biomass recovery in a lowland dipterocarp forest in East Kalimantan, Indonesia. Nutr. Cycl. Agroecosyst. 2005, 71, 63–72. [Google Scholar] [CrossRef]
- Kennel, P.; Tramon, M.; Barbier, N.; Vincent, G. Canopy height model characteristics derived from airborne laser scanning and its effectiveness in discriminating various tropical moist forest types. Int. J. Remote Sens. 2013, 34, 8917–8935. [Google Scholar] [CrossRef]
- Mahli, Y.; Román-Cuesta, R.M. Analysis of lacunarity and scales of spatial homogeneity in IKONOS images of Amazonian tropical forest canopies. Remote Sens. Environ. 2008, 112, 2074–2087. [Google Scholar]
- Weishampel, J.F.; Drake, J.B.; Cooper, A.; Blair, J.B.; Hofton, M. Forest canopy recovery from the 1938 hurricane and subsequent salvage damage measured with airborne LiDAR. Remote Sens. Environ. 2007, 109, 142–153. [Google Scholar] [CrossRef]
- Frazer, G.W.; Wulder, M.A.; Niemann, K. Simulation and quantification of the fine-scale spatial pattern and heterogeneity of forest canopy structure: A lacunarity-based method designed for analysis of continuous canopy heights. For. Ecol. Manag. 2005, 214, 65–90. [Google Scholar] [CrossRef]
- Bradshaw, G.A.; Spies, T.A. Characterizing canopy gap structure in forests using wavelet analysis. J. Ecol. 1992, 80, 205–215. [Google Scholar] [CrossRef]
- Mallat, S. A Wavelet Tour of Signal Processing, 3rd ed.; Academic Press: New York, NY, USA, 2008. [Google Scholar]
- Davis, A.; Marshak, A.; Wiscombe, W. Wavelet-based multifractal analysis of non-stationary and/or intermittent geophysical signals. In Wavelets in Geophysics, 1st ed.; Foufoula-Georghiou, E., Kumar, P., Eds.; Academic Press: New York, NY, USA, 1994; Volume 4, pp. 249–298. [Google Scholar]
- Bongers, F. Methods to assess tropical rain forest canopy structure: An overview. Plant Ecol. 2001, 153, 263–277. [Google Scholar] [CrossRef]
- Lertzman, K.; Fall, J. From forest stands to landscape: Spatial scales and the roles of disturbances. In Ecological Scale: Theory and Applications, 10th ed.; Peterson, D.L., Parker, V.T., Eds.; Columbia University Press: New York, NY, USA, 1998; pp. 339–368. [Google Scholar]
- Barbier, N.; Couteron, P.; Proisy, C.; Malhi, Y.; Gastellu-Etchegorry, J-P. The variation of apparent crown size and canopy heterogeneity across lowland Amazonian forests. Glob. Ecol. Biogeogr. 2010, 19, 72–84. [Google Scholar] [CrossRef]
- Palace, M.; Keller, M.; Asner, G.P.; Hagen, S.; Braswell, B. Amazon forest structure from IKONOS satellite data and the automated characterization of forest canopy properties. Biotropica 2008, 40, 141–150. [Google Scholar] [CrossRef]
- Asner, G.P.; Palace, M.; Keller, M.; Pereira, R., Jr.; Silva, J.N.M.; Zweede, J.C. Estimating canopy structure in an Amazon forest from laser range finder and IKONOS satellite observations. Biotropica 2002, 34, 483–492. [Google Scholar] [CrossRef]
- Wulder, M.; Franklin, S.E. Remote Sensing of Forest Environments: Concepts and Case Studies, 1st ed.; Springer: Dordrecht, The Netherlands, 2003. [Google Scholar]
- Brearley, F.Q.; Prajadinata, S.; Kidda, P.S.; Proctor, J. Structure and floristics of an old secondary rain forest in Central Kalimantan, Indonesia, and a comparison with adjacent primary forest. For. Ecol. Manag. 2004, 195, 385–397. [Google Scholar] [CrossRef]
- Delang, C.; Li, W.M. Forest structure. In Ecological Succession on Fallowed Shifting Cultivation Fields: A Review of the Literature, 1st ed.; Delang, C.O., Li, W.M., Eds.; Springer: Heidelberg, Germany, 2013; pp. 9–37. [Google Scholar]
- Eichhorn, K.A.O. Plant Diversity after Rain-Forest Fires in Borneo. Ph.D. Thesis, University of Leiden, Leiden, The Netherlands, 17 May 2006. [Google Scholar]
- Slik, J.W.; Verburg, R.W.; Keßler, P.J.A. Effects of fire and selective logging on the tree species composition of lowland dipterocarp forest in East Kalimantan, Indonesia. Biodivers. Conserv. 2002, 11, 85–98. [Google Scholar] [CrossRef]
- Slik, J.W.; Bernard, C.S.; Van Beek, M.; Breman, F.C.; Eichhorn, K.A.O. Tree diversity, composition, forest structure and aboveground biomass dynamics after single and repeated fire in a Bornean rain forest. Oecologia 2008, 158, 579–588. [Google Scholar] [CrossRef] [PubMed]
- Van Nieuwstadt, M.G. Trail by Fire. Postfire Development of a Tropical Dipterocarp Forest. Ph.D. Thesis, University of Utrecht, Utrecht, The Netherlands, 13 May 2002. [Google Scholar]
- Yeager, C.P.; Marshall, A.J.; Stickler, C.M.; Chapman, C.A. Effects of fires on Peat Swamp and Lowland Dipterocarp Forests in Kalimantan, Indonesia. Trop. Biodiver. 2003, 8, 121–138. [Google Scholar]
- Roughgarden, J.; Running, S.W.; Matson, P.A. What Does Remote Sensing Do For Ecology? Ecology 1991, 72, 1918–1922. [Google Scholar] [CrossRef]
- Van der Sanden, J.J.; Hoekman, D.H. Potential of airborne radar to support the assessment of landcover in a tropical rainforest. Remote Sens. Environ. 1999, 68, 26–40. [Google Scholar] [CrossRef]
- De Sy, V.; Herold, M.; Achard, F.; Asner, G.P.; Held, A.; Kellndorfer, J.; Verbesselt, J. Synergies of multiple remote sensing data sources for REDD + monitoring. Curr. Opin. Environ. Sustain. 2012, 4, 696–706. [Google Scholar] [CrossRef]
- Gallardo-Cruz, J.A.; Meave, J.A.; González, E.J.; Lebrija-Trejos, E.E.; Romero-Romero, M.A.; Pérez-García, E.A.; Gallardo-Cruz, R.; Hernández-Stefanoni, J.L.; Martorell, C. Predicting tropical dry forest successional attributes from space: Is the key hidden in image texture? PLoS ONE 2012, 7, 1–12. [Google Scholar] [CrossRef] [PubMed]
- Proisy, C.; Couteron, P.; Francois, F. Predicting and mapping mangrove biomass from canopy rain analysis using Fourier-based textural ordination of IKONOS images. Remote Sens. Environ. 2007, 109, 379–392. [Google Scholar] [CrossRef]
- Kaasalainen, S.; Holopainen, M.; Karjalainen, M.; Vastaranta, M.; Kankare, V.; Karila, K.; Osmanoglu, B. Combining LiDAR and synthetic aperture radar data to estimate forest biomass: Status and prospects. Forests 2015, 6, 252–270. [Google Scholar] [CrossRef]
- Couteron, P.; Pelissier, R.; Nicolini, E.A.; Paget, D. Predicting tropical forest stand structure parameters from Fourier transform of very high-resolution remotely sensed canopy images. J. Appl. Ecol. 2005, 42, 1121–1128. [Google Scholar] [CrossRef] [Green Version]
- Lim, K.; Treitz, P.W.M.; St-Onge, B.; Flood, M. LiDAR remote sensing of forest structure. Prog. Phys. Geogr. 2003, 27, 88–106. [Google Scholar] [CrossRef]
- Balzter, H. Forest mapping and monitoring with interferometric synthetic aperture radar (InSAR). Prog. Phys. Geogr. 2001, 25, 159–177. [Google Scholar] [CrossRef]
- Kent, R.; Lindsell, J.A.; Vaglio Laurin, G.; Valentini, R.; Coomes, D.A. Airborne LiDAR detects selectively logged tropical forest even in an advanced stage of recovery. Remote Sens. 2015, 7, 8448–8367. [Google Scholar] [CrossRef]
- Wedeux, B.; Coomes, D. Landscape-scale changes in forest canopy structure across a partially logged tropical peat swamp. Biogeosci. 2015, 12, 6707–6719. [Google Scholar] [CrossRef]
- Véga, C.; Vepakomma, U.; Morel, J.; Bader, J-L.; Rajashekar, G.; Jha, C.S.; Ferêt, J.; Proisy, C.; Pélissier, R.; Dadhwal, V.K. Aboveground-biomass estimation of a complex tropical forest in Indian using LiDAR. Remote Sens. 2015, 7, 10607–10625. [Google Scholar] [CrossRef]
- Garrity, S.R.; Meyer, K.; Maurer, K.D.; Hardiman, B.; Bohrer, G. Estimating plot-level tree structure in a deciduous forest by combining allometric equations, spatial wavelet analysis and airborne LiDAR. Remote Sens. Lett. 2012, 3, 443–451. [Google Scholar] [CrossRef]
- Krieger, G.; Moreira, A.; Fiedler, H.; Hajnsek, I.; Wener, M.; Younis, M.; Zink, M. TanDEM-X: A satellite formation for high-resolution SAR interferometry. IEEE Tran. Geosci. Remote Sens. 2007, 45, 3317–3341. [Google Scholar] [CrossRef]
- Bräutigam, B.; Martone, M.; Rizzoli, P.; Gonzalez, C.; Weclich, C.; Borla Tridon, D.; Bachmann, M.; Schulze, D.; Zink, M. Quality assessment for the first part of the TanDEM-X Global Digital Elevation Model. In Proceedings of the 36th International Symposium on Remote Sensing of Environment, Berlin, Germany, 11–15 May 2015; pp. 1137–1143.
- Solberg, S.; Lohne, T.P.; Karyanto, O. Temporal stability of InSAR height in a tropical rainforest. Remote Sens. Lett. 2015, 6, 209–217. [Google Scholar] [CrossRef]
- Kugler, F.; Hajnsek, I. Forest characterisation by means of TerraSAR-X and TanDEM-X (polarimetric and) interferometric data. In Proceedings of the IEEE International Geosciences and Remote Sensing Symposium, Vancouver, BC, Canada, 24–29 July 2011; pp. 2578–2581.
- Praks, J.; Antropov, O.; Hallikainen, M. LiDAR-aided SAR interferometry studies in boreal forest: Scattering phase center and extinction coefficient at X- and L-Band. IEEE Tran. Geosci. Remote Sens. 2012, 50, 3831–3843. [Google Scholar] [CrossRef]
- Treuhaft, R.; Gonçalves, F.; dos Santos, J.R.; Keller, M.; Palace, M.; Madsen, S.N.; Sullivan, F.; Graça, P.M.L.A. Tropical-forest biomass estimation at X-Band from. IEEE Geosci. Remote Sens. Lett. 2015, 12, 239–243. [Google Scholar] [CrossRef]
- Hajnsek, I.; Kugler, F.; Lee, S.-K.; Papathanassiou, K. Tropical-forest-parameter estimation by means of Pol-InSAR: The INDREX-II campaign. IEEE Tran. Geosci. Remote Sens. 2009, 42, 481–493. [Google Scholar] [CrossRef]
- Kugler, F.; Lee, S.-K.; Hajnsek, I.; Papathanassiou, K. Forest height estimation by means of Pol-InSAR data inversion: The role of the vertical wavenumber. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5294–5311. [Google Scholar] [CrossRef]
- Walsh, R.P.D. Drought frequency changes in Sabah and adjacent parts of northern Borneo since the late nineteenth century and possible implications for tropical rain forest dynamics. J. Trop. Ecol. 1996, 12, 385–407. [Google Scholar] [CrossRef]
- Yassir, I.; van der Kamp, J.; Buurman, P. Secondary succession after fire in Imperata grasslands of East Kalimantan, Indonesia. Agric. Ecosyst. Environ. 2010, 137, 172–182. [Google Scholar] [CrossRef]
- Indonesian Ministry of Forestry. Available online: http://webgis.dephut.go.id/ditplanjs/ (accessed on 20 September 2015).
- Sarmap. 2012. Available online: http://www.sarmap.ch/pdf/SARscapeTechnical.pdf (accessed on 5 November 2015).
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef]
- Balzter, H.; Rowland, C.; Saich, P. Forest canopy and carbon estimation at Monks Wood National Nature Reserve, UK, using dual-wavelength SAR interferometry. Remote Sens. Environ. 2007, 108, 224–239. [Google Scholar] [CrossRef]
- De Grandi, E.C.; Mitchard, E.; Woodhouse, I.; De Grandi, G.D. Spatial wavelet statistics of SAR backscatter for characterizing degraded forest: A case study from Cameroon. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 3572–3584. [Google Scholar] [CrossRef]
- Alexander, L.A.; Inggs, M.R. The investigation into the effects of speckle filters on classification. In Proceedings of the IEEE International Geosciences and Remote Sensing Symposium, Hamburg, Germany, 28 June–2 July 1999; pp. 1226–1228.
- Kugler, F.; Sauer, S.; Lee, S.-K.; Papathanassiou, K.; Hajnsek, I. Potential of TanDEM-X for forest parameter estimation. In Proceedings of the 8th European Conference on Synthetic Aperture Radar (EUSAR), Aachen, Germany, 7–10 June 2010; pp. 178–181.
- Proisy, C.; Barbier, N.; Guéroult, M.; Pélissier, R.; Gastellu-Etchegorry, J.-P.; Grau, E.; Couteron, P. Biomass prediction in tropical forests: The canopy grain approach. In Remote Sensing of Biomass: Principles and Applications; Fatoyinbo, L., Ed.; InTech: Rijeka, Croatia, 2012; pp. 1–18. [Google Scholar]
- Percival, D.B.; Walden, A.T. Wavelet Methods for Time Series Analysis, 1st ed.; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar]
- Hoekman, D.H.; Varekamp, C. Observation of tropical rain forest trees by airborne high-resolution interferometric radar. IEEE Tran. Geosci. Remote Sens. 2001, 39, 584–594. [Google Scholar] [CrossRef]
- Ouma, Y.O.; Tetuki, J.; Tateishi, R. Analysis of co-occurrence and discrete wavelet transform texture for differentiation in very high resolution optical-sensor imagery. Int. J. Remote Sens. 2008, 29, 3417–3456. [Google Scholar] [CrossRef]
- Cochrane, M.A.; Schultze, M.D. Forest fires in the Brazilian Amazon. Conserv. Biol. 1998, 12, 948–950. [Google Scholar] [CrossRef]
- Cochrane, M.A.; Schultze, M.D. Fires as a recurrent event in tropical forests of the Eastern Amazon. Biotropica 1999, 31, 2–16. [Google Scholar]
- Krieger, G.; Hajnsek, I.; Papathanassiou, K.; Eineder, M.; Younis, M.; De Zan, F.; Prats, P.; Huber, S.; Werner, M.; Fiedler, H.; et al. The Tandem-L mission proposal: Monitoring earth’s dynamics with high resolution SAR interferometry. In Proceeding of the IEEE Radar Conference, Pasadena, CA, USA, 4–8 May 2009; pp. 1–6.
- Eineder, M.; Hajnsek, I.; Krieger, G.; Moreira, A.; Papathanassiou, K. TanDEM-L. In Satellite Mission Proposal for Monitoring Dynamic Processes on the Earth’s Surface; German Aerospace Center: Cologne, Germany, 2014. [Google Scholar]
- Sun, G.; Ranson, K.J. Radar modelling of forest spatial patterns. Int. J. Remote Sens. 1998, 19, 1769–1791. [Google Scholar] [CrossRef]
- Brown, S.; Lugo, A.E. Tropical secondary forests. J. Trop. Ecol. 1990, 6, 1–32. [Google Scholar] [CrossRef]
- WorldDEMTM Technical Product Specification. Version 1.0. Available online: http://www.engesat.com.br/wp-content/uploads/455–201404_worlddem_technicalspecs_i1.pdf (accessed on 11 November 2015).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Mode | StripMap bistatic |
| Acquisition Date | 11/12/2014 |
| Polarization | HH |
| Incidence Angle (°) | 41 |
| Resolution (azimuth, range) (m) | 3.3 × 1.8 |
| Ground resolution (m) at 41° | 3.3 × 2.74 |
| Effective Baseline (m) | 223 |
| HoA (m) | 30.2 |
| Orbit direction | Ascending |
| Look direction | Right |
| Class | GR | MS | SF | PF | |
|---|---|---|---|---|---|
| GR | 1.29 | 1.35 | 1.39 | ||
| MS | 1.29 | 1.23 | 1.26 | ||
| SF | 1.35 | 1.23 | 1.18 | ||
| PF | 1.39 | 1.26 | 1.18 | ||
| GR | 1.29 | 1.35 | 1.39 | ||
| MS | 1.29 | 1.31 | 1.32 | ||
| SF | 1.35 | 1.31 | 1.36 | ||
| PF | 1.39 | 1.32 | 1.36 |
| Metric | (%) | Class Pair | |||||
|---|---|---|---|---|---|---|---|
| GR/MS | GR/SF | GR/PF | MS/SF | MS/PF | SF/PF | ||
| Lower | 3.13 | 0.18 | 0.06 | 0.18 | 0.06 | 2.32 | |
| Upper | 17.68 | 4.29 | 2.47 | 4.29 | 2.47 | 15.22 | |
| Lower | 0.65 | 0.23 | 0.02 | 1.31 | 0.44 | 0.38 | |
| Upper | 8.07 | 4.77 | 1.23 | 11.46 | 6.60 | 6.18 | |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
De Grandi, E.C.; Mitchard, E.; Hoekman, D. Wavelet Based Analysis of TanDEM-X and LiDAR DEMs across a Tropical Vegetation Heterogeneity Gradient Driven by Fire Disturbance in Indonesia. Remote Sens. 2016, 8, 641. https://doi.org/10.3390/rs8080641
De Grandi EC, Mitchard E, Hoekman D. Wavelet Based Analysis of TanDEM-X and LiDAR DEMs across a Tropical Vegetation Heterogeneity Gradient Driven by Fire Disturbance in Indonesia. Remote Sensing. 2016; 8(8):641. https://doi.org/10.3390/rs8080641
Chicago/Turabian StyleDe Grandi, Elsa Carla, Edward Mitchard, and Dirk Hoekman. 2016. "Wavelet Based Analysis of TanDEM-X and LiDAR DEMs across a Tropical Vegetation Heterogeneity Gradient Driven by Fire Disturbance in Indonesia" Remote Sensing 8, no. 8: 641. https://doi.org/10.3390/rs8080641