
Defuzzification Strategies for Fuzzy Classifications of Remote Sensing Data


Abstract
:1. Introduction
2. Materials and Methods
2.1. Fuzzy Classification of Remote Sensing Data
2.2. Defuzzification of Fuzzy Classification Results
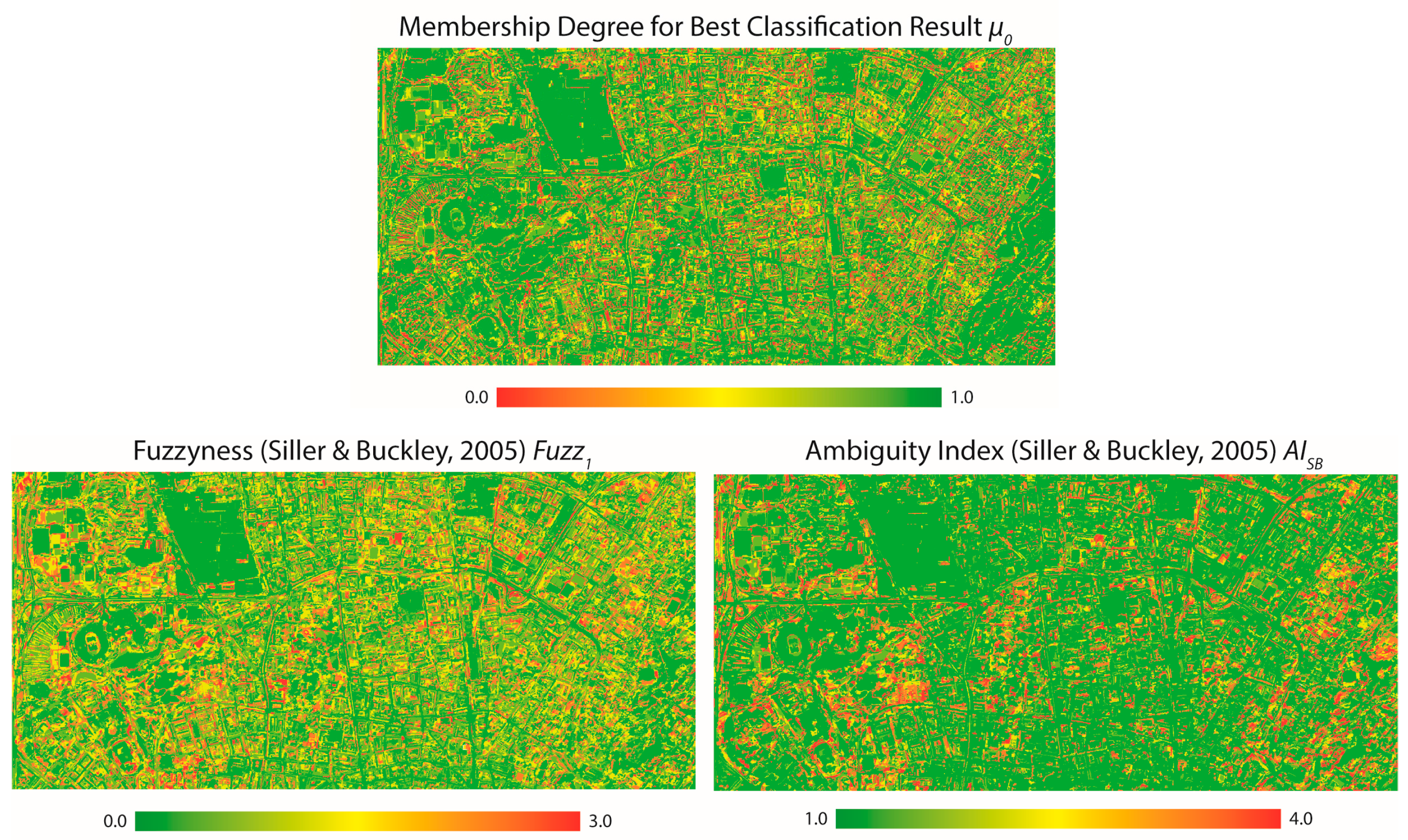
2.2.1. Classification Uncertainty and Ambiguity
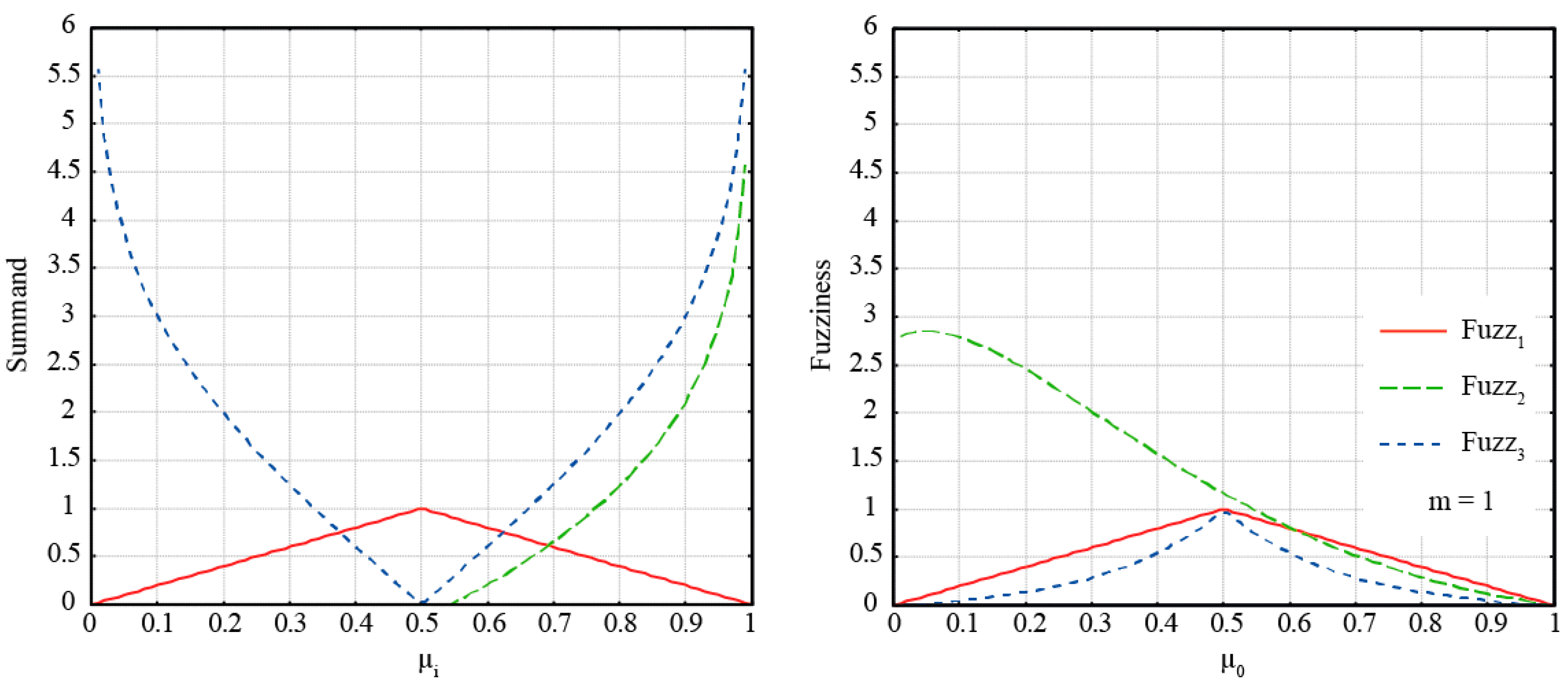
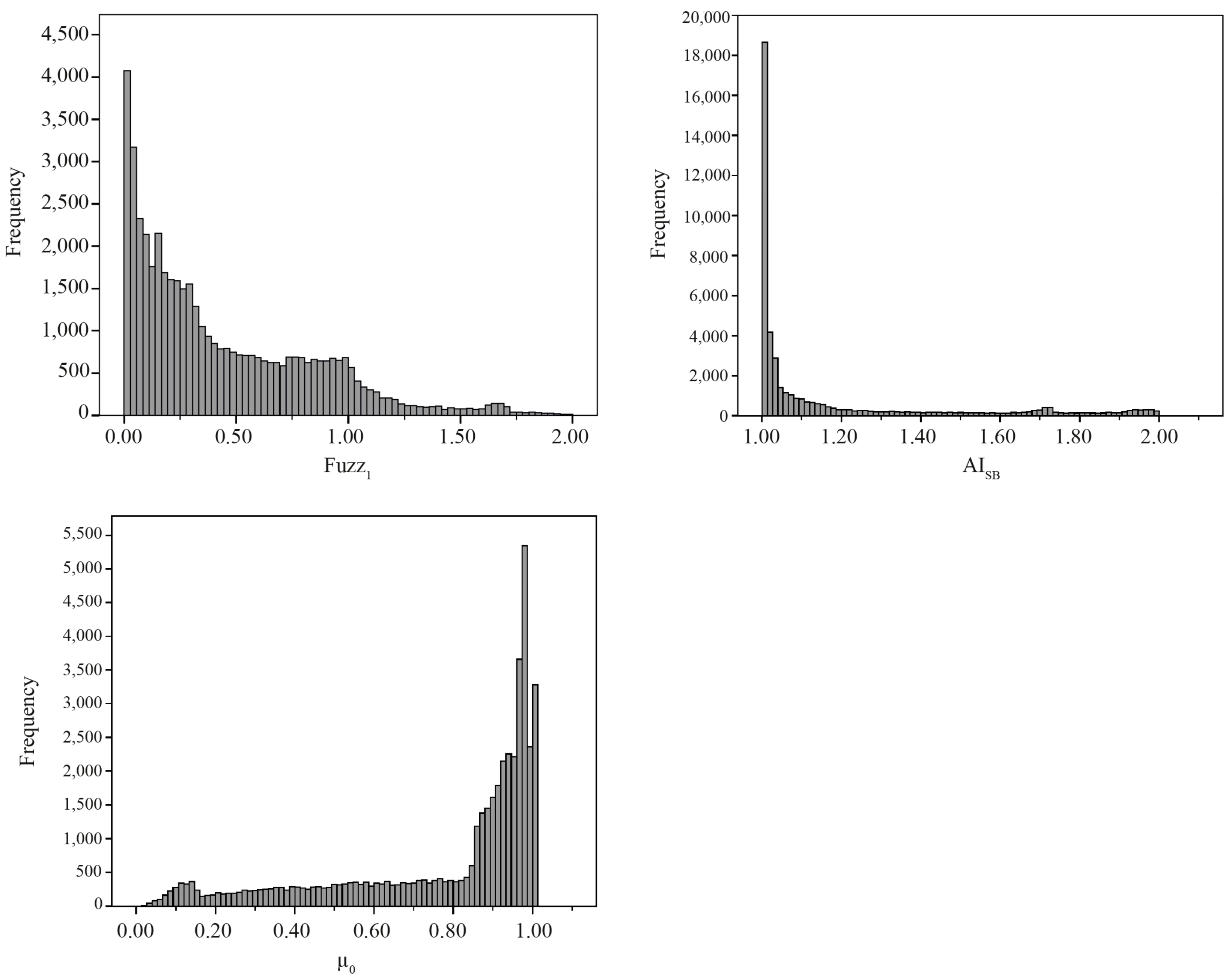
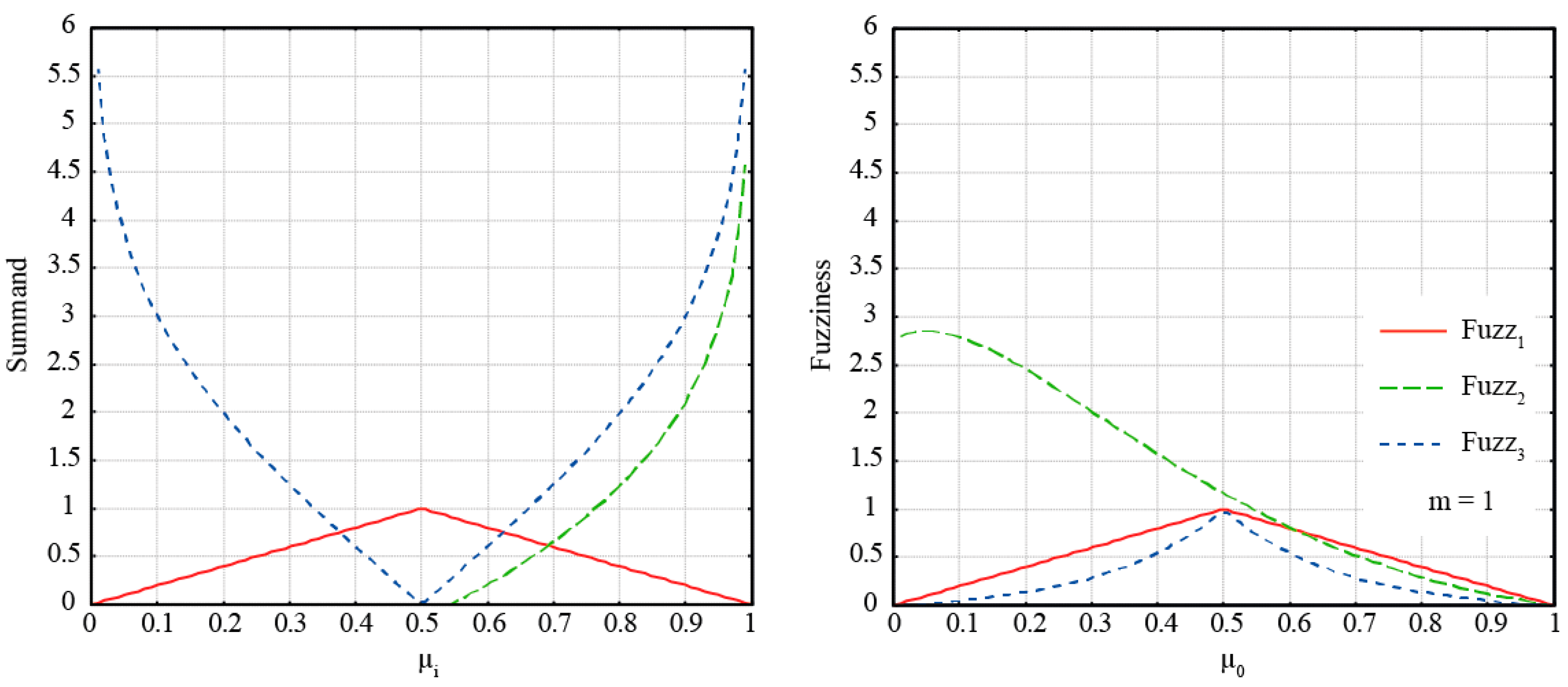
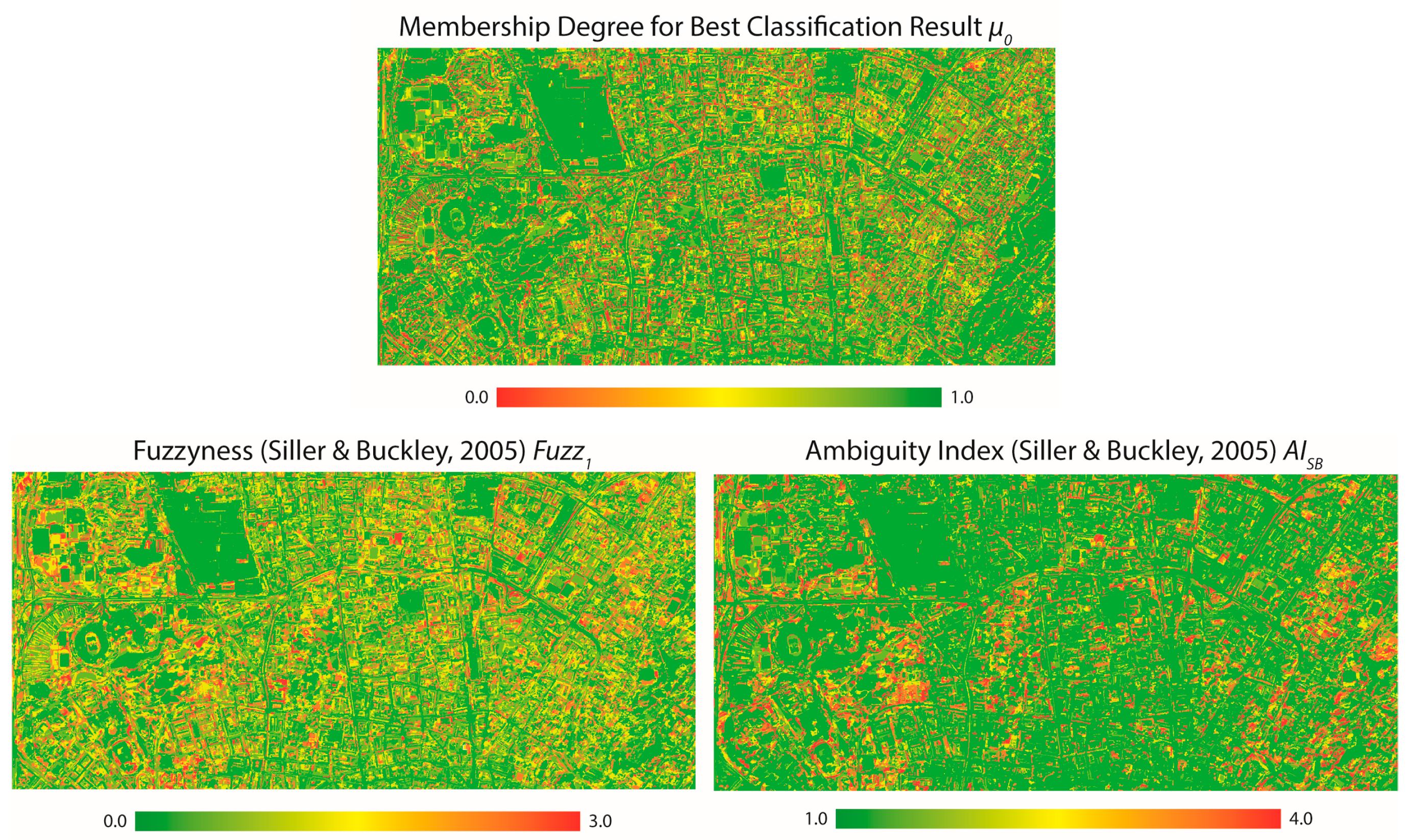
2.2.2. Fuzziness
2.2.3. Quantifying Classification Uncertainty, Ambiguity and Fuzziness per Entity
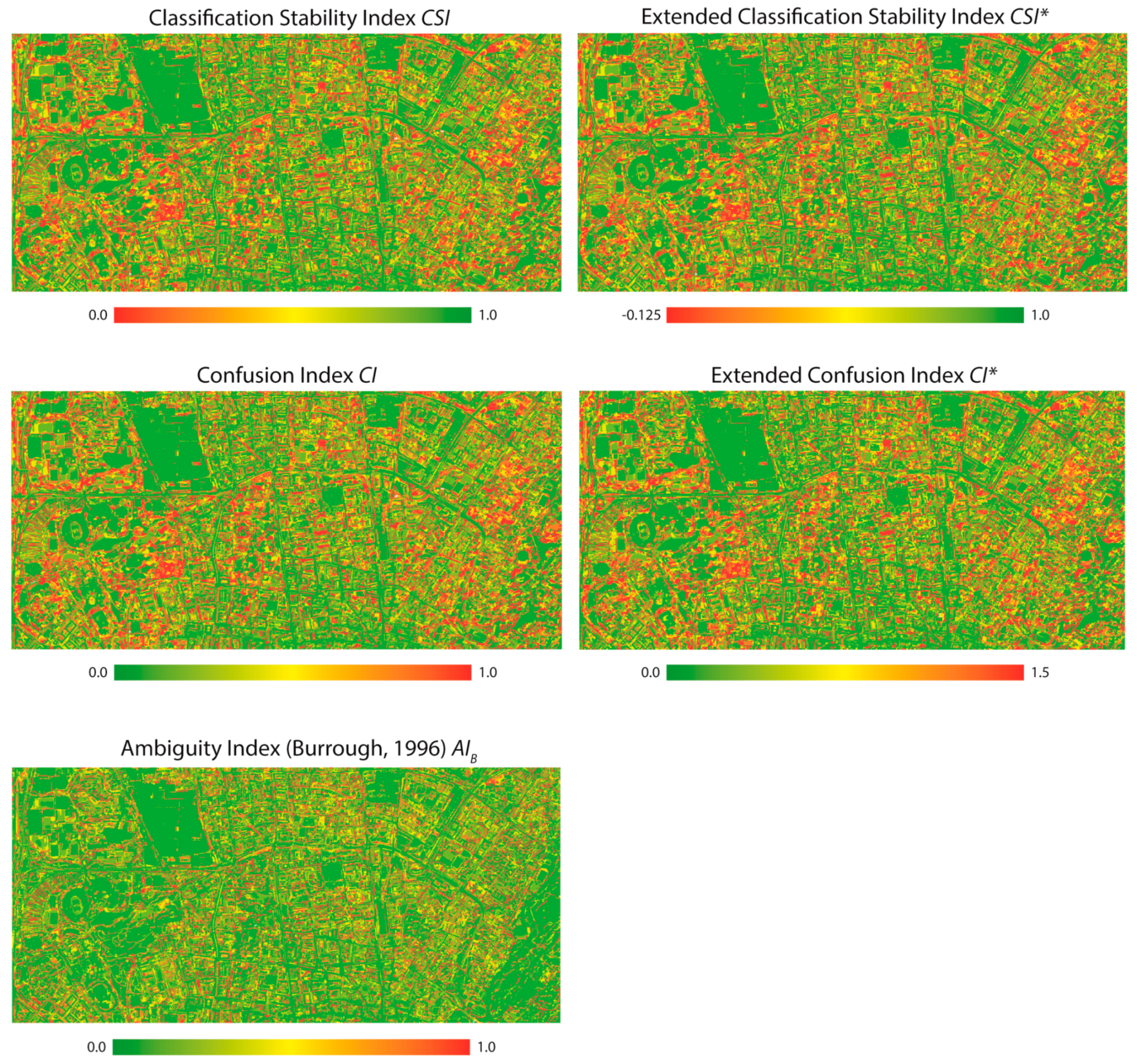
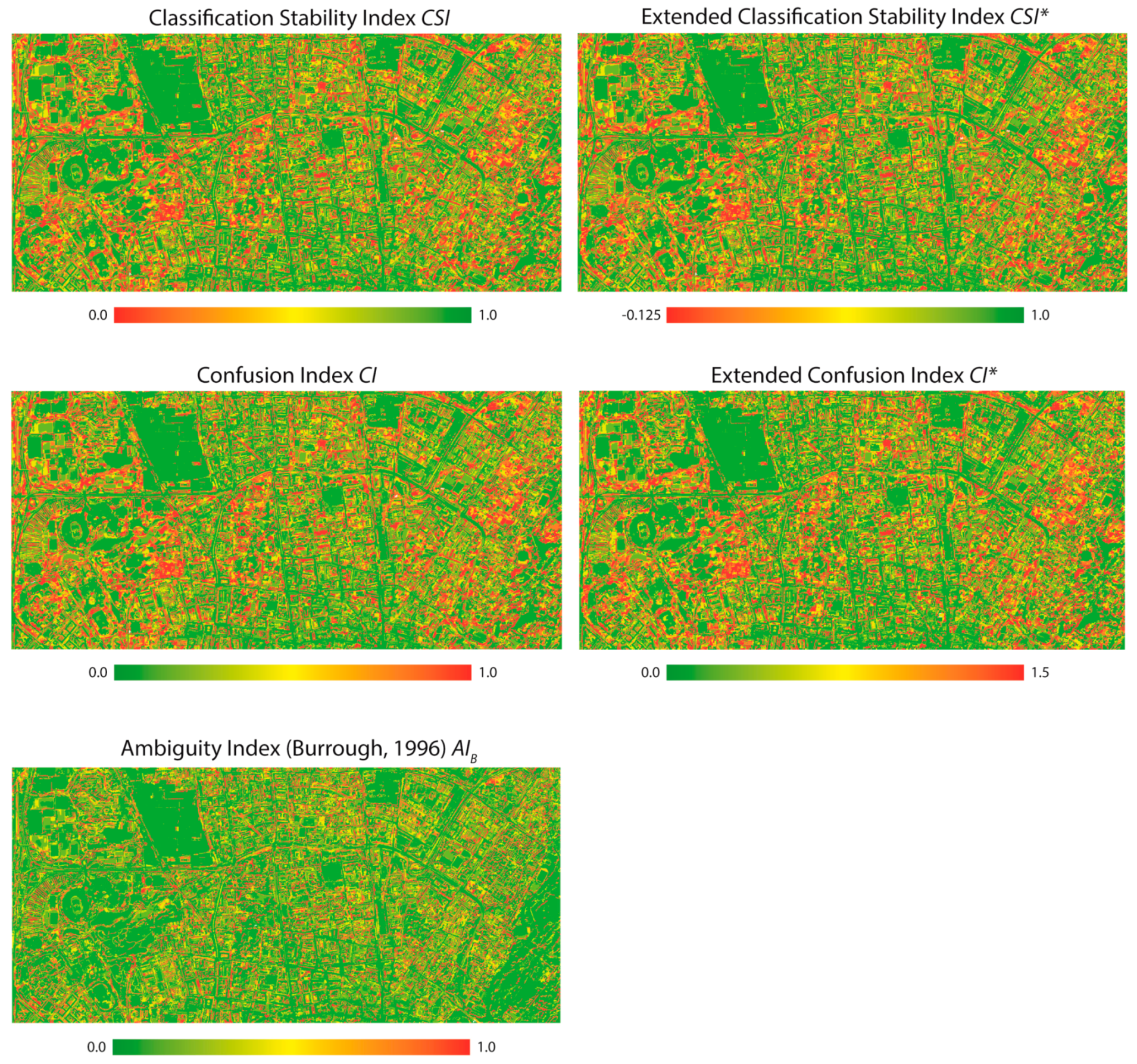
- Classification Stability Index and Confusion Index
- 2.
- Ambiguity Index
- 3.
- Fuzziness
2.2.4. Decision Rules for Defuzzification
- 1.
- Uncertainty
- 2.
- Fuzziness
- 3.
- Ambiguity
- 4.
- Compound decision rule for defuzzification
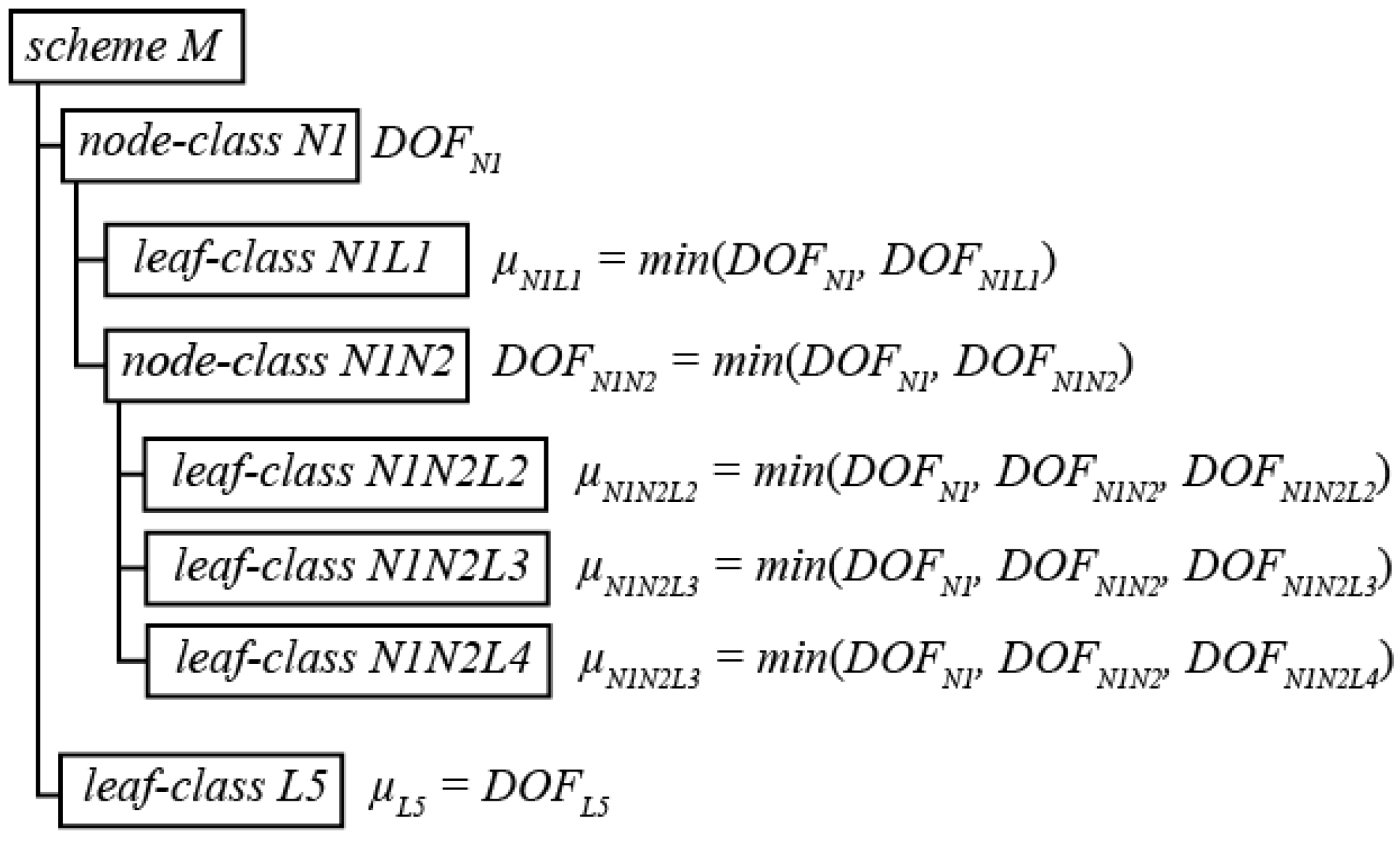
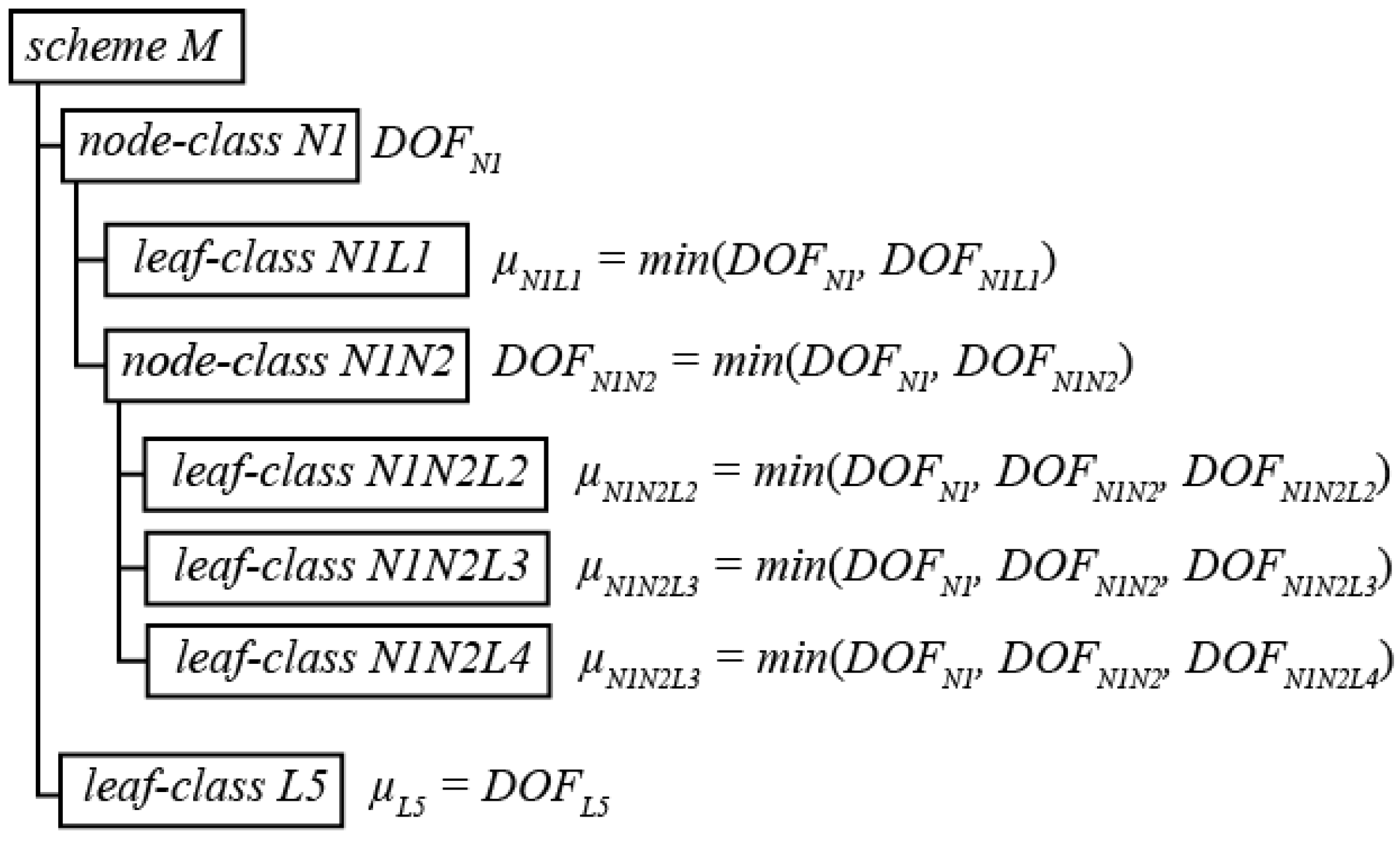
2.3. Defuzzification in Hierarchical Classification Schemes
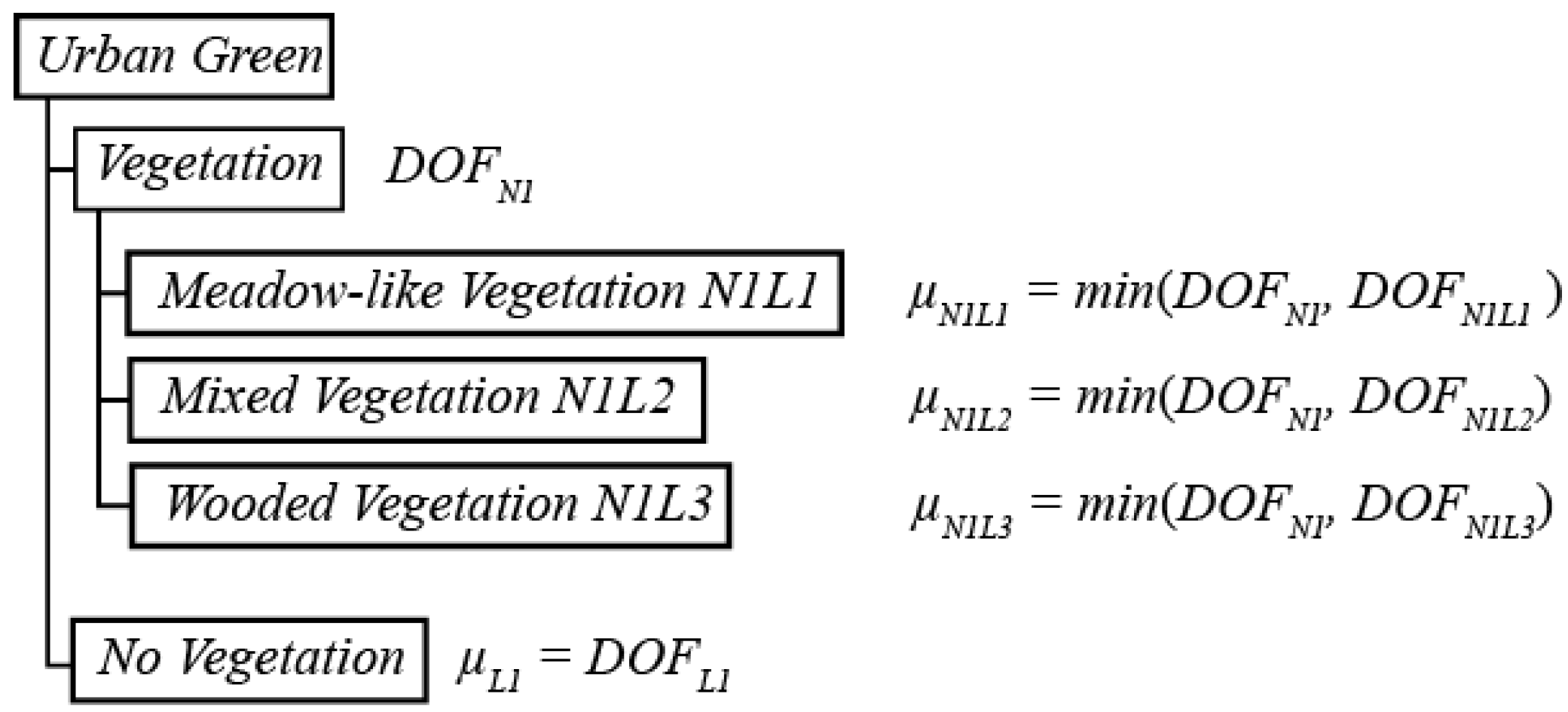
2.4. Example: Vegetation Map of Munich
3. Results
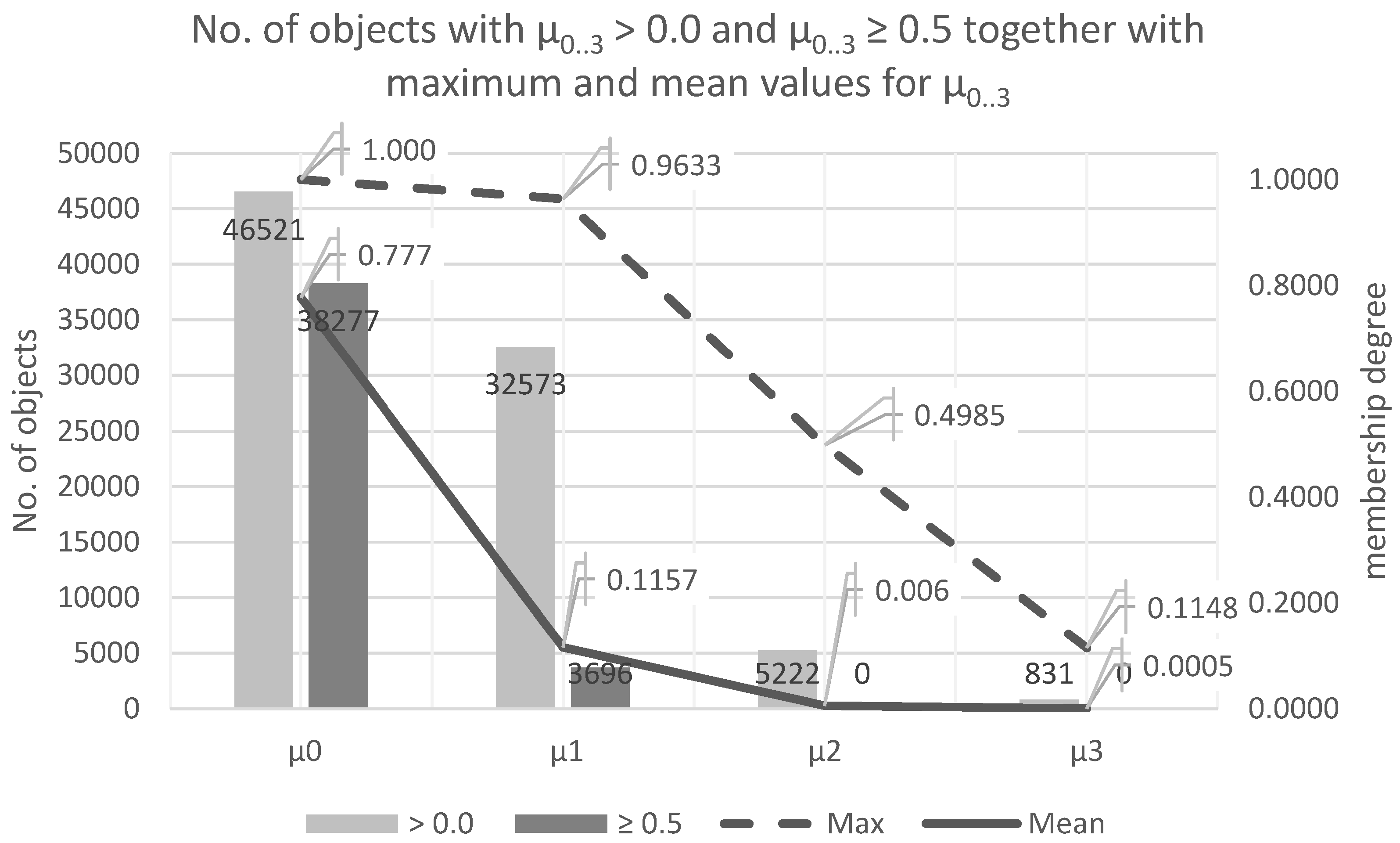
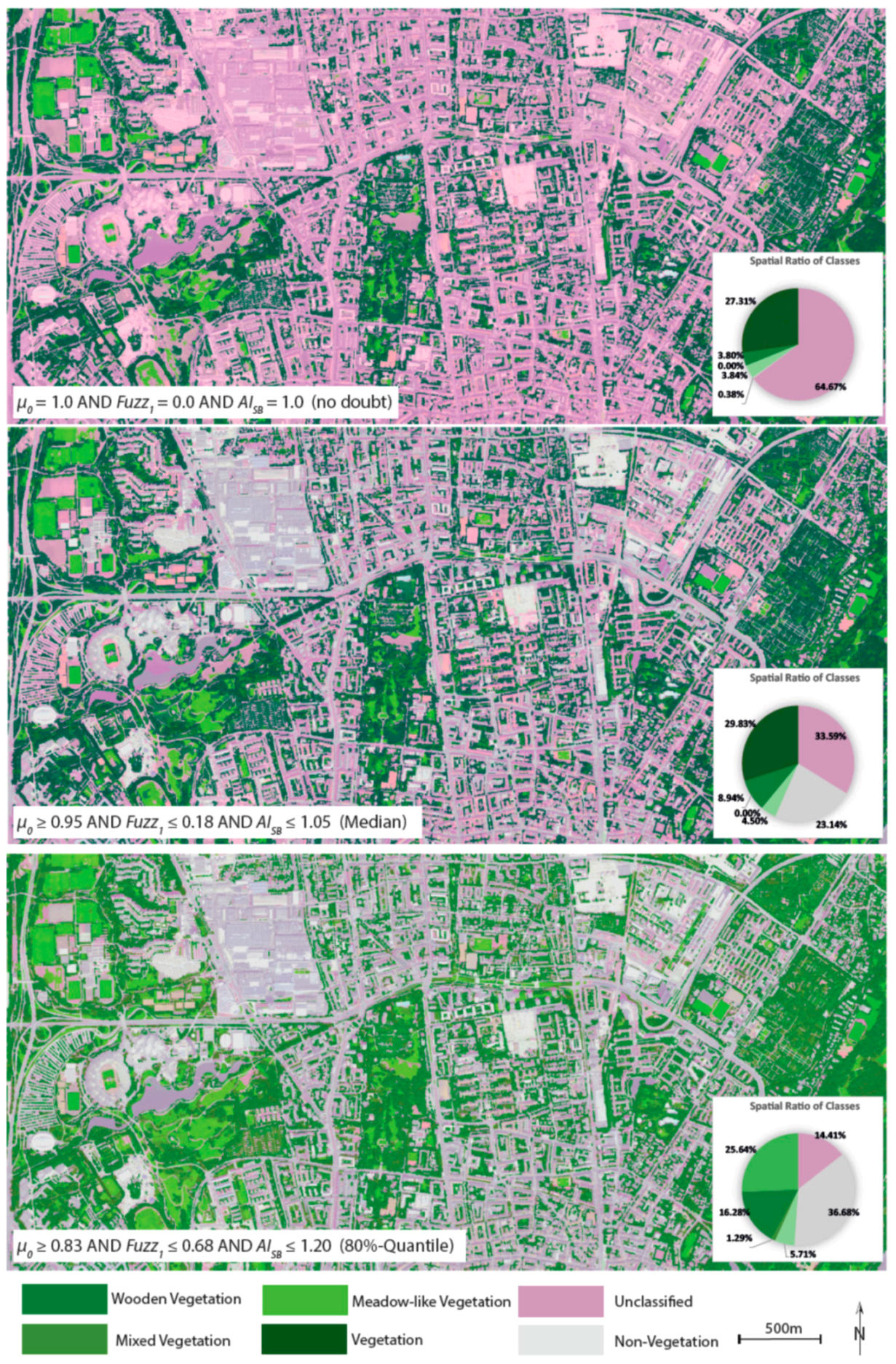
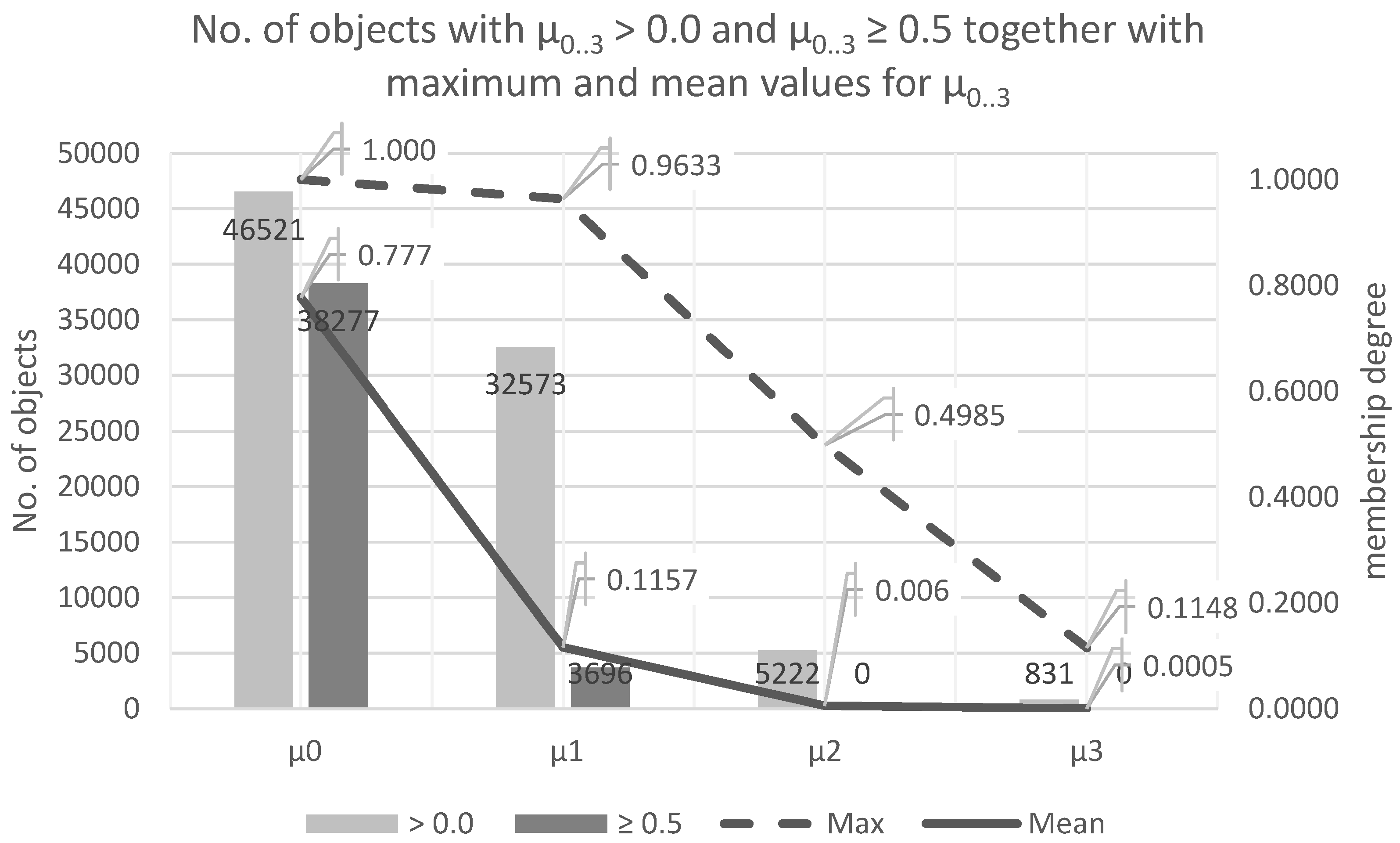
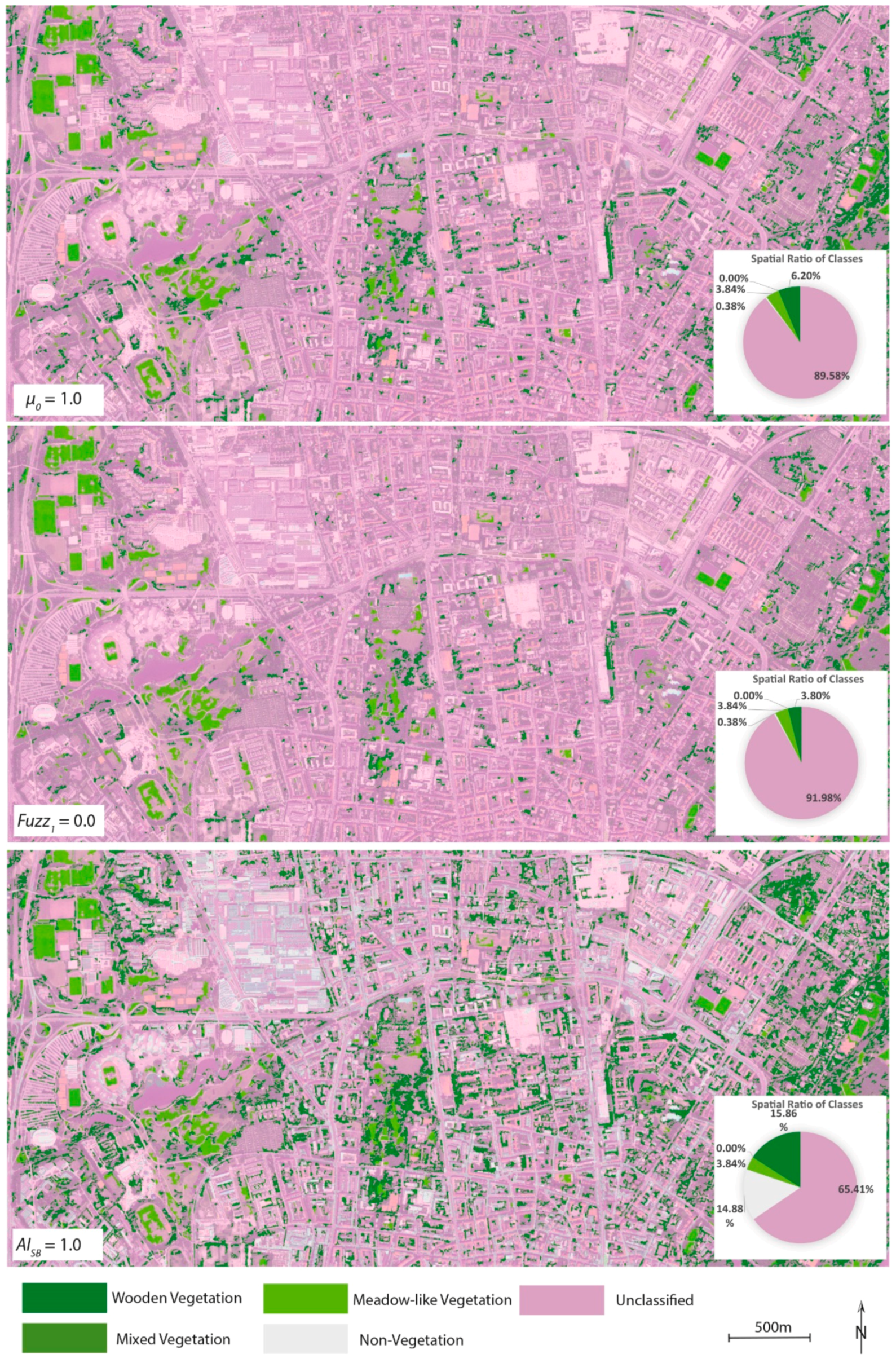
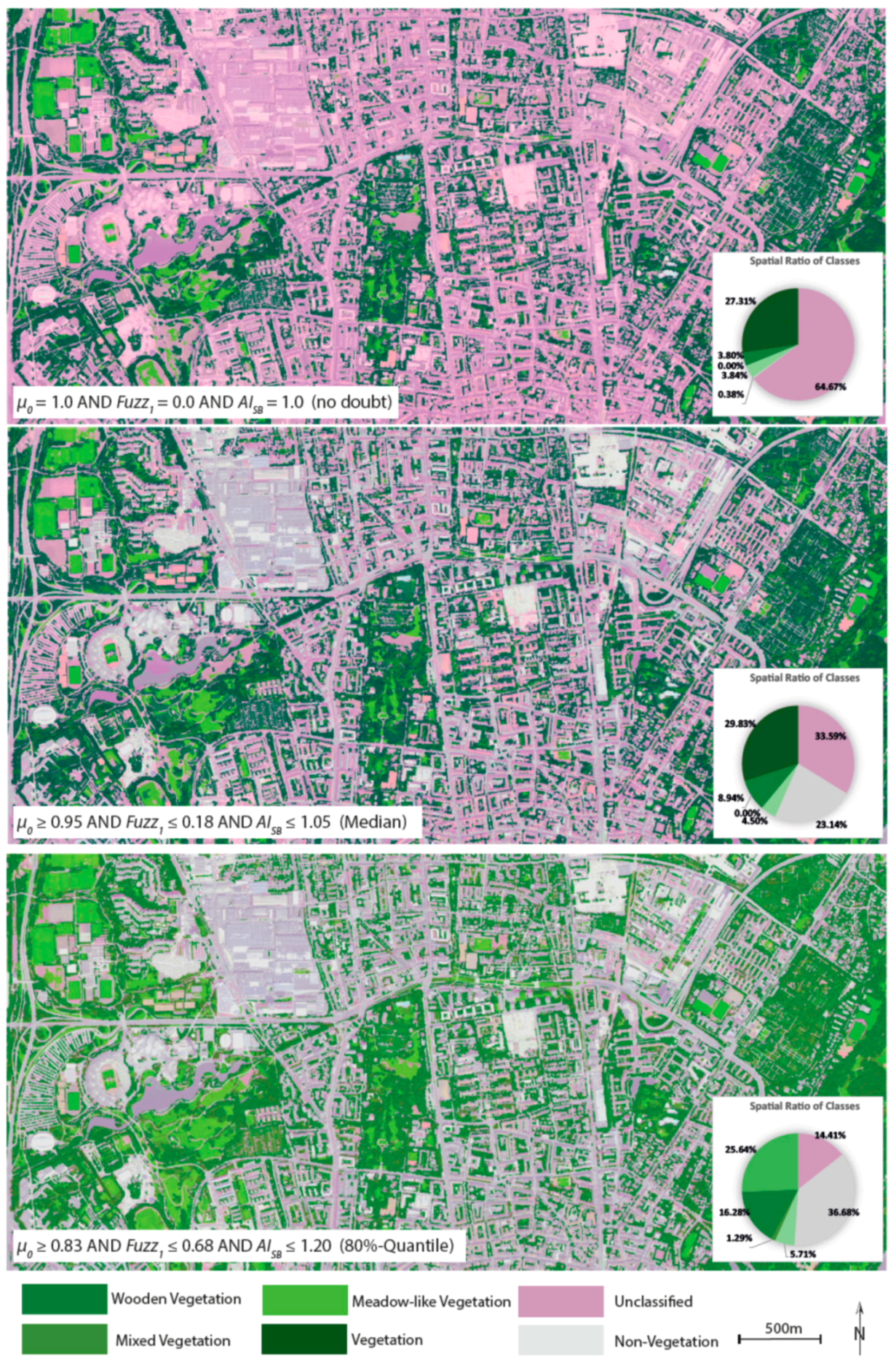
3.1. Defuzzification of Absolutely Doubtlessly Classified Objects
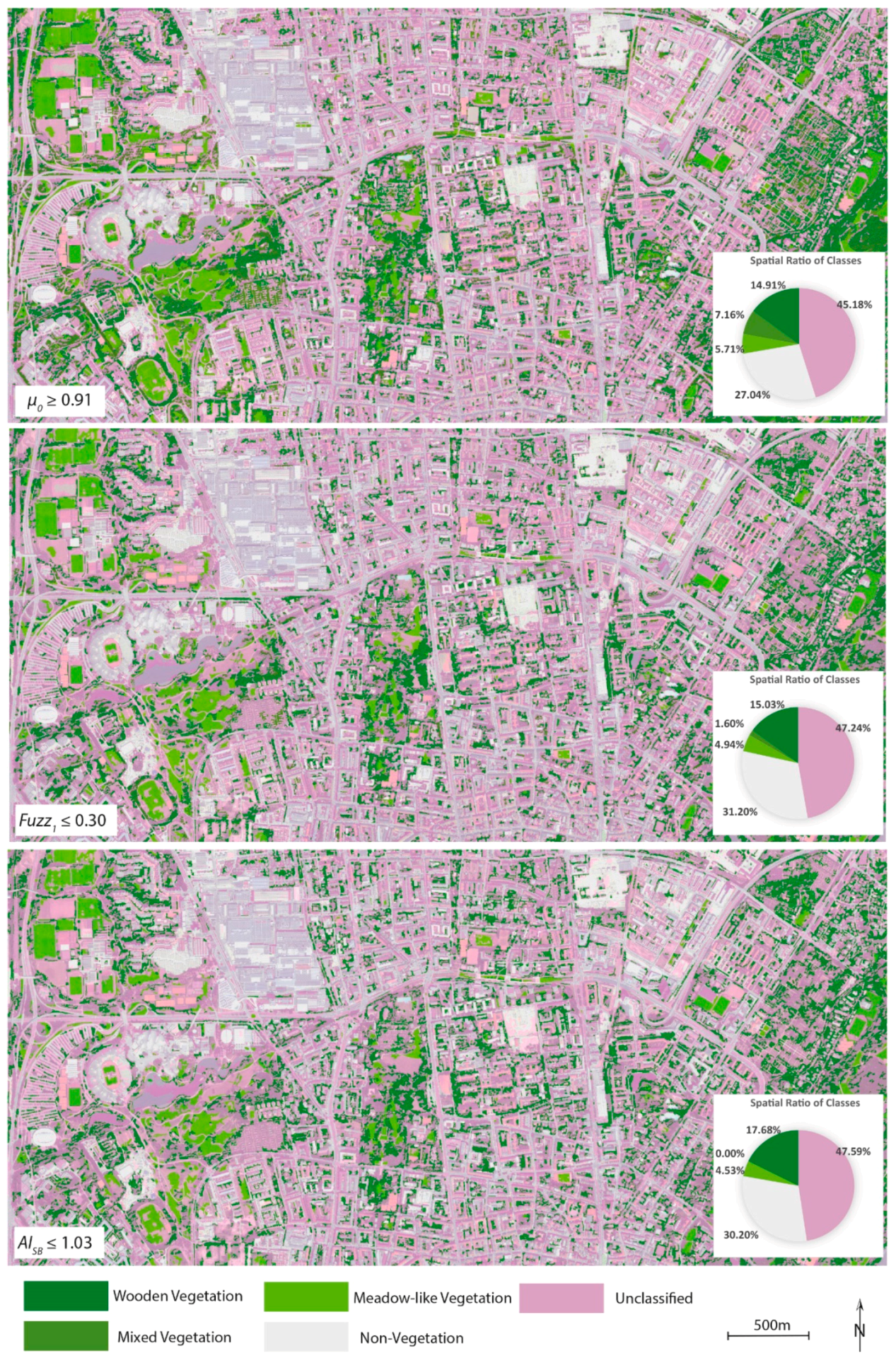
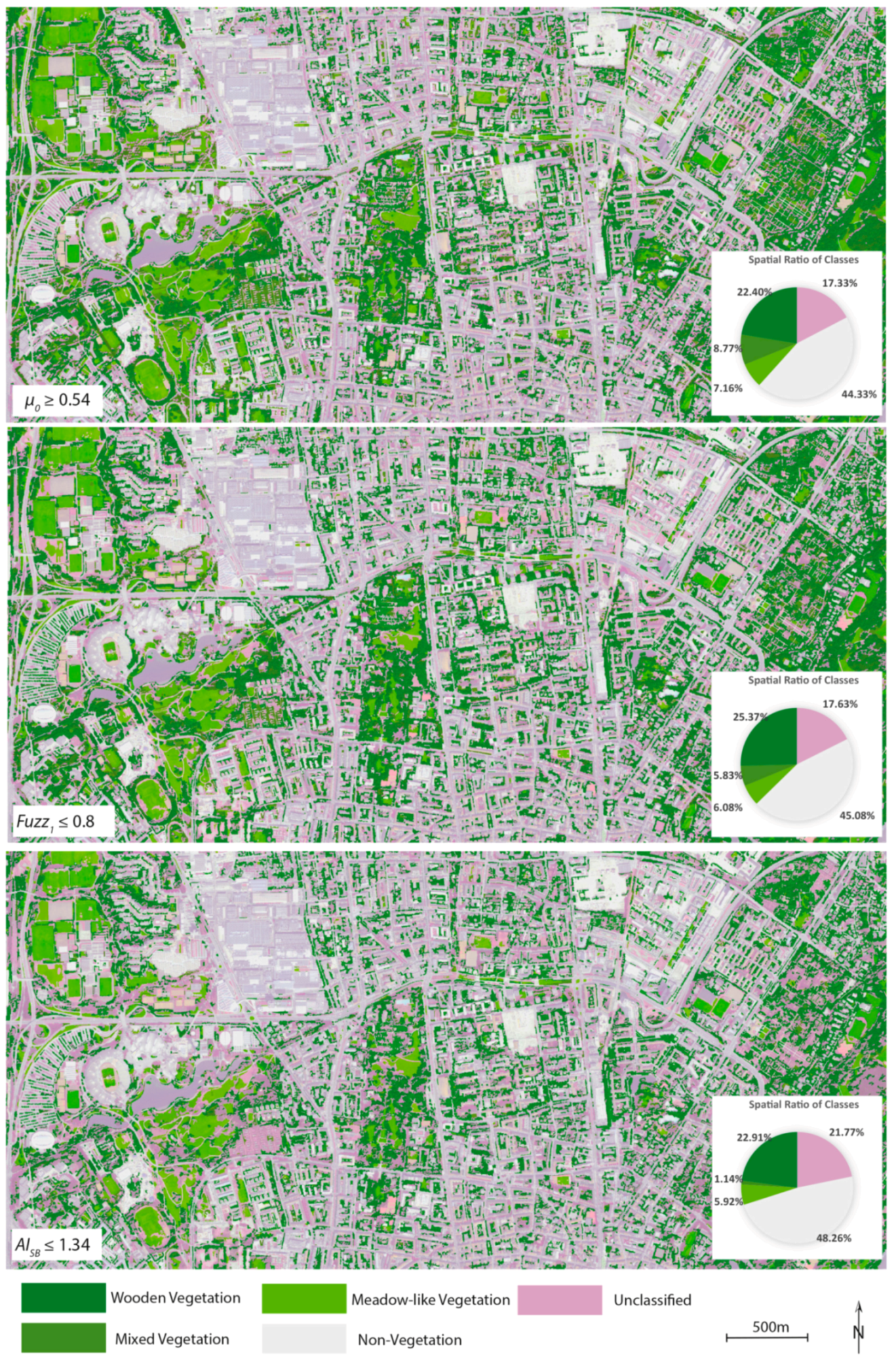
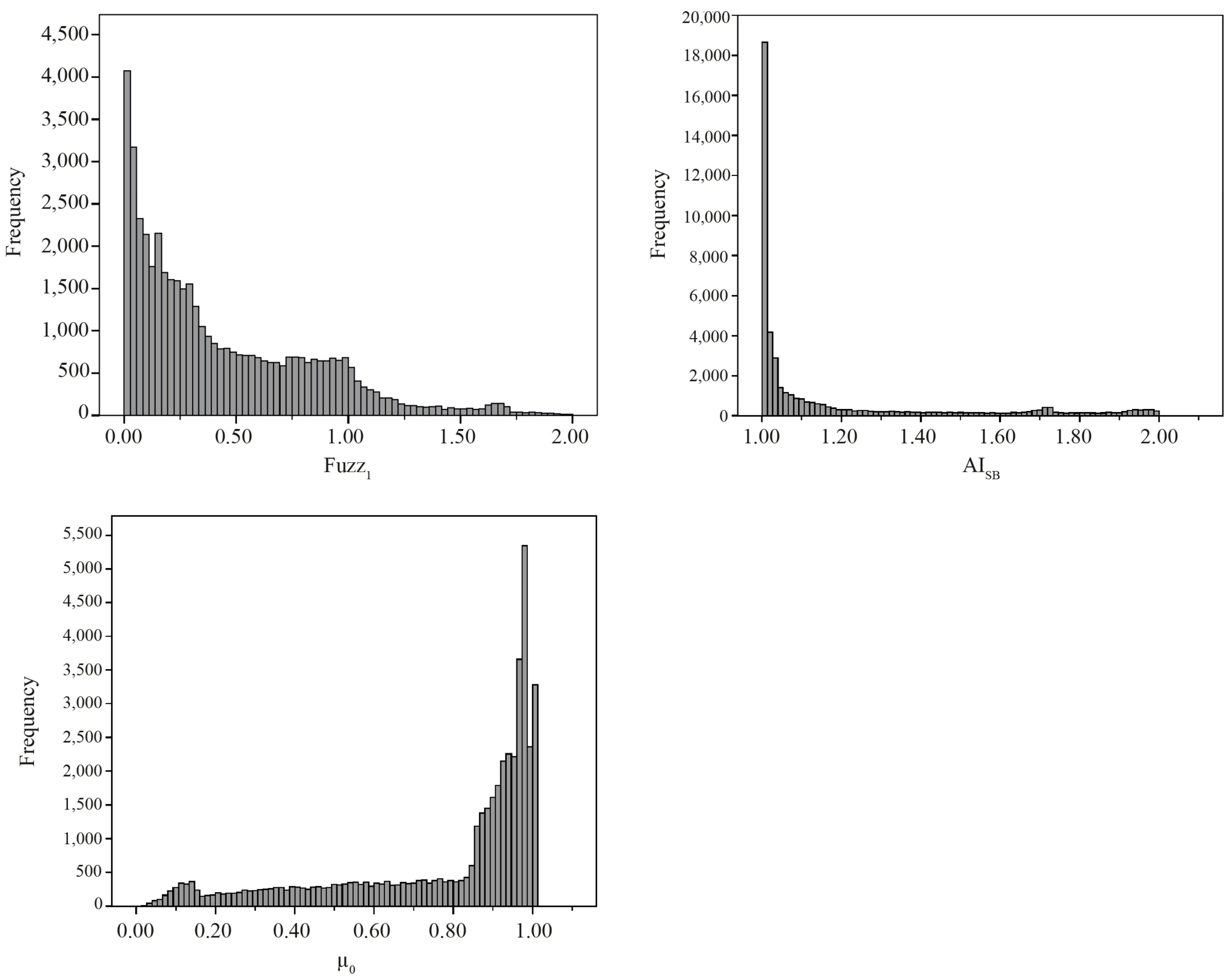
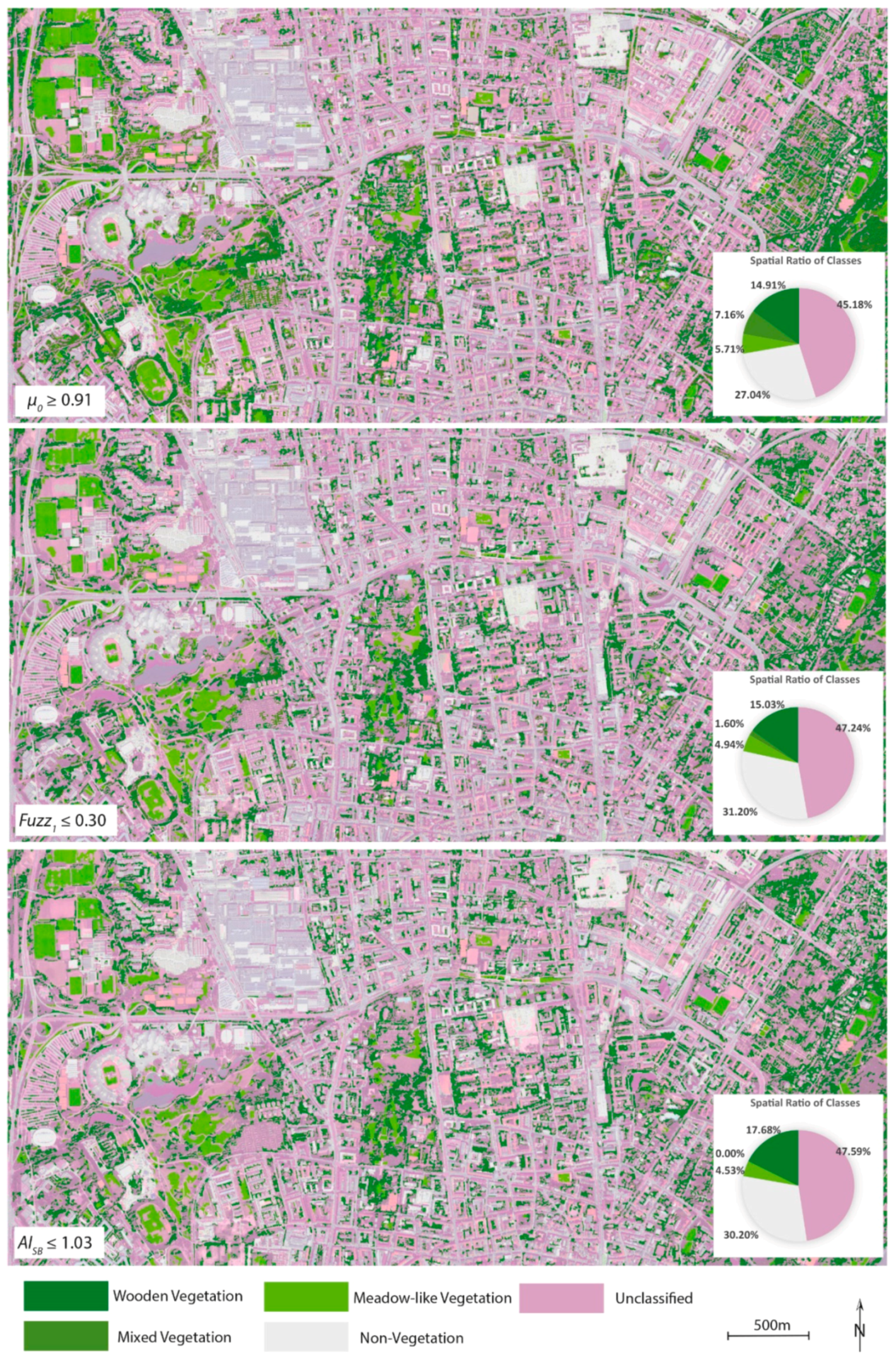
3.2. Defuzzification Based on Uncertainty, Fuzziness and Ambiguity
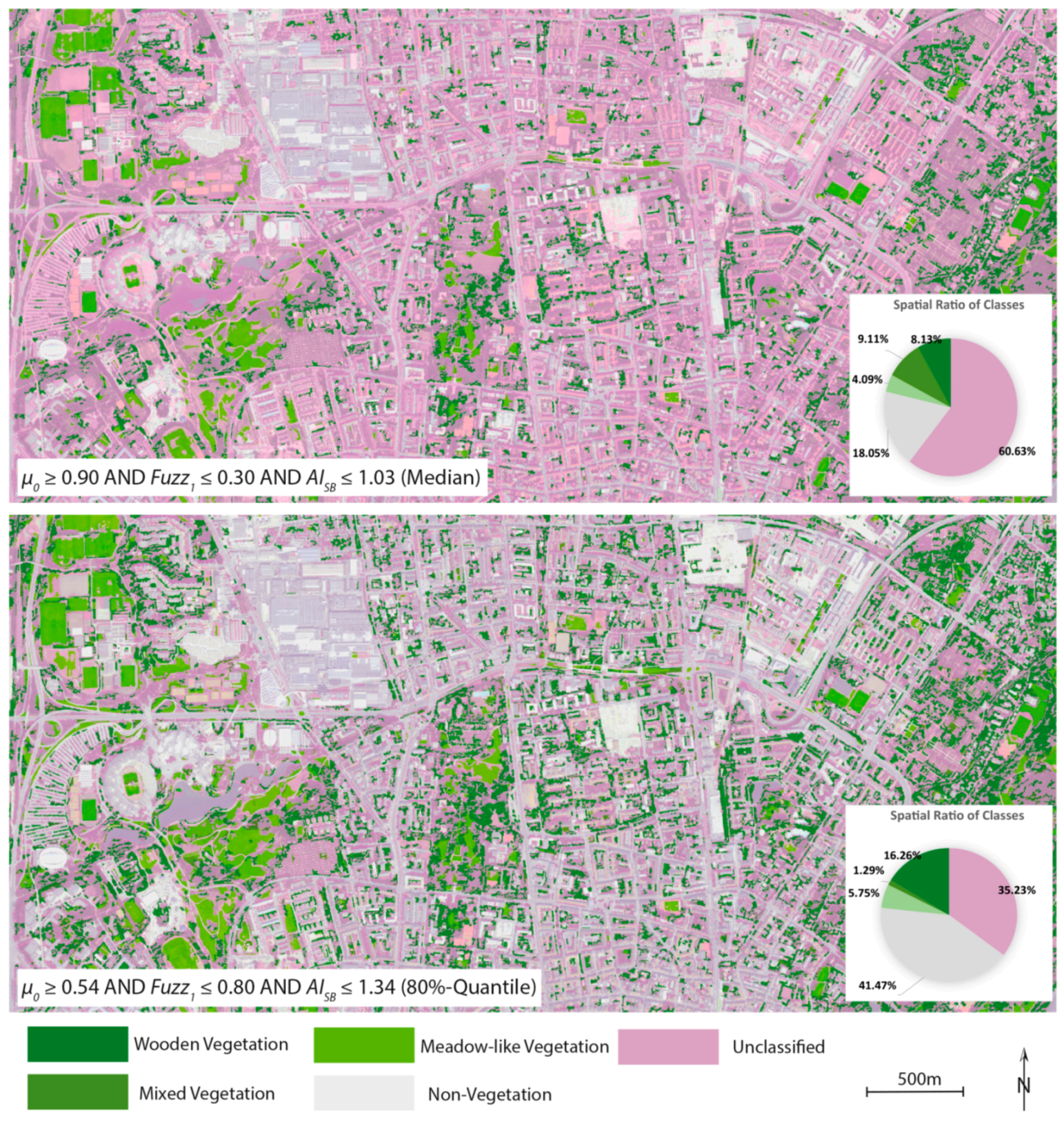
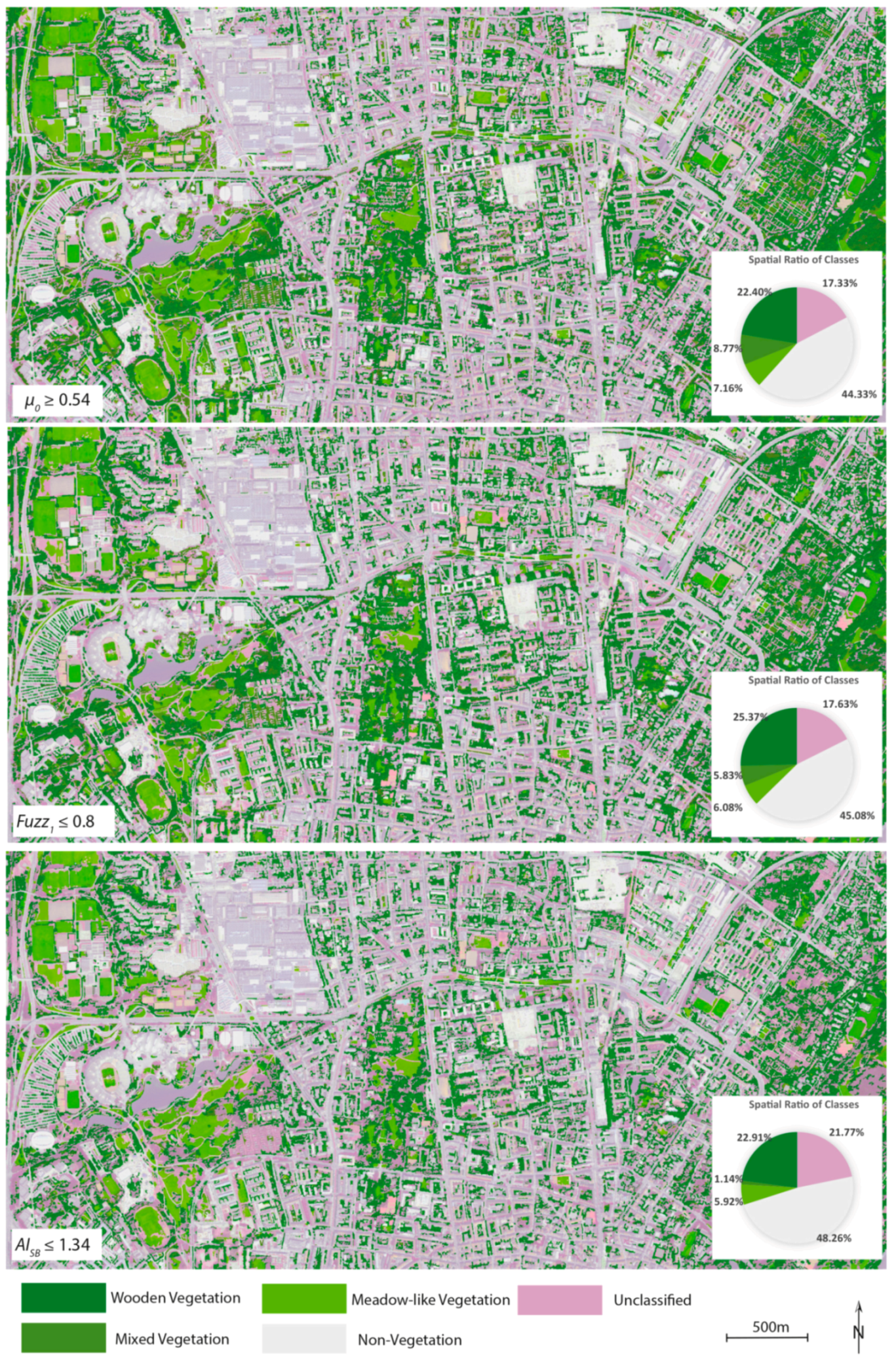
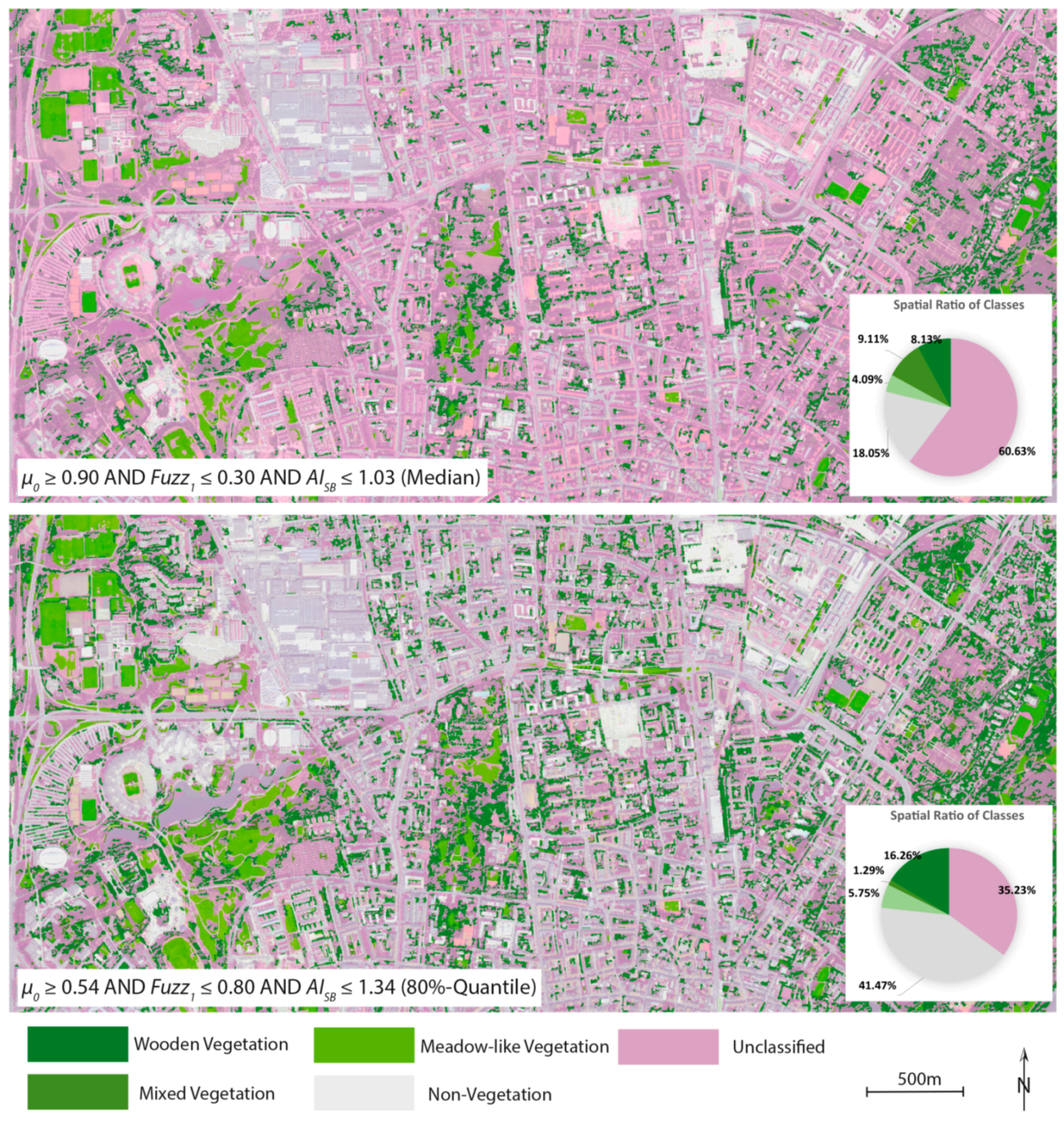
3.3. Defuzzification Based on Compound Criteria
3.4. Re-Classification of Rejected L-Class Objects
4. Discussion
5. Conclusions
Supplementary Materials
Acknowledgments
Conflicts of Interest
Abbreviations
| DOF | Degree Of Fulfillment |
| OBIA | Object Based Image Analysis |
| BCR | Best Classification Result |
| CNL | Cognition Network Language |
| CSI | Classification Stability Index |
| CI | Confusion Index |
| AI | Ambiguity Index |
| Fuzz | Fuzziness |
| NDVI | Normalized Difference Vegetation Index |
| ABIA | Agent Based Image Analysis |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fuzz2 | Fuzz3 | |
|---|---|---|
| Max | 53.0706 | 0.0023 |
| Mean | 1.2510 | 0.0000 |
| Min | 0.0000 | 0.0000 |
| Standard Dev. | 2.3368 | 0.0000 |
Appendix B
References
- Foody, G.M. Approaches for the production and evaluation of fuzzy land cover classifications from remotely-sensed data. Int. J. Remote Sens. 1996, 17, 1317–1340. [Google Scholar] [CrossRef]
- Foody, G.M. Fuzzy modelling of vegetation from remotely sensed imagery. Ecol. Model. 1996, 85, 3–12. [Google Scholar] [CrossRef]
- Zhang, J.; Foody, G.M. A fuzzy classification of sub-urban land cover from remotely sensed imagery. Int. J. Remote Sens. 1998, 19, 2721–2738. [Google Scholar] [CrossRef]
- Siler, W.; Buckley, J.J. Fuzzy Expert Systems and Fuzzy Reasoning; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Yager, R.R. On the measure of fuzziness and negation part I: Membership in the unit interval. Int. J. Gen. Syst. 1979, 5, 221–229. [Google Scholar] [CrossRef]
- Benz, U.C.; Hofmann, P.; Willhauck, G.; Lingenfelder, I.; Heynen, M. Multi-resolution, object-oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS J. Photogramm. Remote Sens. 2004, 58, 239–258. [Google Scholar] [CrossRef]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Yager, R.R. On ordered weighted averaging aggregation operators in multicriteria decisionmaking. IEEE Trans. Fuzzy Syst. Man Cybern. 1988, 18, 183–190. [Google Scholar] [CrossRef]
- Shackelford, A.K.; Davis, C.H. A hierarchical fuzzy classification approach for high-resolution multispectral data over urban areas. IEEE Trans. Fuzzy Syst. Geosci. Remote Sens. 2003, 41, 1920–1932. [Google Scholar] [CrossRef]
- Trimble. eCognition Developer 8.9 User Guide; Trimble: Munich, Germany, 2013. [Google Scholar]
- Yager, R.R. Knowledge-based defuzzification. Fuzzy Sets Syst. 1996, 80, 177–185. [Google Scholar] [CrossRef]
- Roychowdhury, S.; Pedrycz, W. A survey of defuzzification strategies. Int. J. Intell. Syst. 2001, 16, 679–695. [Google Scholar] [CrossRef]
- Hatzichristos, T.; Potamias, J. Defuzzification operators for geographical data of nominal scale. In Proceedings of the 12th International Conference on Geoinformatics Geospatial Information Research: Bridging the Pacific and Atlantic, Gävle, Sweden, 7–9 June 2004.
- Hofmann, P.; Strobl, J.; Nazarkulova, A. Mapping green spaces in Bishkek—How reliable can spatial analysis be? Remote Sens. 2011, 3, 1088–1103. [Google Scholar] [CrossRef]
- Yager, R.R. On a measure of ambiguity. Int. J. Intell. Syst. 1995, 10, 1001–1019. [Google Scholar] [CrossRef]
- Bhandari, D.; Pal, N.R.; Majumder, D.D. Measures of discrimination and ambiguity for fuzzy sets. In Proceedings of the IEEE International Conference on Fuzzy Systems, San Diego, CA, USA, 8–12 March 1992; pp. 145–152.
- Burrough, P.A. Natural objects with indeterminate boundaries. In Geographic Objects with Indeterminate Boundaries; Burrough, P., Frank, A., Eds.; Taylor & Francis: Abingdon, UK, 1996; pp. 3–29. [Google Scholar]
- Athelogou, M.; Schmidt, G.; Schäpe, A.; Baatz, M.; Binnig, G. Cognition network technology—A novel multimodal image analysis technique for automatic identification and quantification of biological image contents. In Imaging Cellular and Molecular Biological Functions; Springer: Berlin, Germany; Heidelberg, Germany, 2007; pp. 407–422. [Google Scholar]
- De Luca, A.; Termini, S. A definition of a nonprobabilistic entropy in the setting of fuzzy sets theory. Inf. Control 1972, 20, 301–312. [Google Scholar] [CrossRef]
- Pal, N.R.; Bezdek, J.C. Measuring fuzzy uncertainty. IEEE Trans. Fuzzy Syst. 1994, 2, 107–118. [Google Scholar] [CrossRef]
- European Space Imaging (EUSI). Information Products Basic Imagery. 2013. Available online: http://www.euspaceimaging.com/static/images/files/pdf/BasicImagery-WVGA_web.pdf (accessed on 12 September 2013).
- Chavez, P.S., Jr.; Sides, S.C.; Anderson, J.A. Comparison of three different methods to merge multiresolution and multispectral data: Landsat TM and SPOT panchromatic. Photogramm. Eng. Remote Sens. 1991, 57, 295–303. [Google Scholar]
- Trimble. eCognition Developer 8.9 Reference Book; Trimble: Munich, Germany, 2013. [Google Scholar]
- Hofmann, P.; Lettmayer, P.; Blaschke, T.; Belgiu, M.; Wegenkittl, S.; Graf, R.; Lampoltshammer, T.J.; Andrejchenko, V. Towards a framework for agent-based image analysis of remote-sensing data. Int. J. Image Data Fusion 2015, 6, 115–137. [Google Scholar] [CrossRef]
- Belgiu, M.; Lampoltshammer, T.J.; Hofer, B. An extension of an ontology-based land cover designation approach for fuzzy rules. In GI_Forum 2013, Creating the GISociety: Conference Proceedings; Jekel, T., Car, A., Strobl, J., Griesebner, G., Eds.; Wichmann Herbert: Berlin, Germany, 2013; pp. 59–70. [Google Scholar]
- Wang, F. Fuzzy supervised classification of remote sensing images. IEEE Trans. Geosci. Remote Sens. 1990, 28, 194–201. [Google Scholar] [CrossRef]
- Mitra, S.; Pal, S.K. Fuzzy sets in pattern recognition and machine intelligence. Fuzzy Sets Syst. 2005, 156, 381–386. [Google Scholar] [CrossRef]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-oriented image processing in an integrated GIS/remote sensing environment and perspectives for environmental applications. Environ. Inf. Plan. Politics Public 2000, 2, 555–570. [Google Scholar]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A tool to estimate scale parameter for multiresolution image segmentation of remotely sensed data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]



| Class | Properties | Membership Function | Function Values | |
|---|---|---|---|---|
| Lower Bound | Upper Bound | |||
| non-vegetation | NDVI |  | 0.00 | 0.50 |
| vegetation | NDVI |  | 0.00 | 0.50 |
| meadow-like vegetation | ratio NIR |  | 0.12 | 0.17 |
| StdDev NIR |  | 20.00 | 35.00 | |
| mixed vegetation | ratio NIR |  | 0.35 | 0.75 |
| StdDev NIR |  | 20.00 | 50.00 | |
| wooden vegetation | ratio NIR |  | 0.30 | 0.50 |
| StdDev NIR |  | 25.00 | 45.00 | |
| CSI | CSI* | CI | CI* | AIB | AISB | Fuzz1 | |
|---|---|---|---|---|---|---|---|
| Max | 1.0000 | 1.0000 | 1.0000 | 1.4956 | 0.9931 | 3.7696 | 2.9912 |
| Mean | 0.6612 | 0.6542 | 0.3387 | 0.3457 | 0.2230 | 1.1917 | 0.4498 |
| Min | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 0.0000 | 1.0000 | 0.0000 |
| Standard Dev. | 0.3294 | 0.3370 | 0.3293 | 0.3370 | 0.2636 | 0.3096 | 0.4264 |
| Percentile | Fuzz1 | n with Fuzz1 ≤ | AIB | n with AIB ≤ | µ0 | n with µ0 ≤ |
|---|---|---|---|---|---|---|
| 10 | 0.034 | 4653 | 1.000 | 13,951 | 0.036 | 4653 |
| 20 | 0.080 | 13,957 | 1.000 | 13,951 | 0.543 | 9304 |
| 30 | 0.144 | 13,958 | 1.000 | 13,958 | 0.725 | 13,958 |
| 40 | 0.217 | 18,610 | 1.013 | 18,610 | 0.862 | 18,610 |
| 50 | 0.303 | 23,262 | 1.028 | 23,262 | 0.901 | 23,262 |
| 60 | 0.443 | 27,915 | 1.063 | 27,915 | 0.936 | 27,915 |
| 70 | 0.616 | 32,567 | 1.148 | 32,567 | 0.964 | 32,567 |
| 80 | 0.813 | 37,219 | 1.370 | 37,219 | 0.977 | 37,220 |
| 90 | 1.012 | 41,872 | 1.747 | 41,872 | 0.991 | 41,872 |
| Percentile | Fuzz1 | AIB | µ0 |
|---|---|---|---|
| 10 | 0.000 | 1.000 | 0.669 |
| 20 | 0.000 | 1.000 | 0.830 |
| 30 | 0.048 | 1.012 | 0.888 |
| 40 | 0.101 | 1.026 | 0.923 |
| 50 | 0.178 | 1.047 | 0.955 |
| 60 | 0.306 | 1.083 | 0.975 |
| 70 | 0.446 | 1.126 | 0.988 |
| 80 | 0.680 | 1.205 | 1.000 |
| 90 | 1.323 | 1.494 | 1.000 |
© 2016 by the author; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hofmann, P. Defuzzification Strategies for Fuzzy Classifications of Remote Sensing Data. Remote Sens. 2016, 8, 467. https://doi.org/10.3390/rs8060467
Hofmann P. Defuzzification Strategies for Fuzzy Classifications of Remote Sensing Data. Remote Sensing. 2016; 8(6):467. https://doi.org/10.3390/rs8060467
Chicago/Turabian StyleHofmann, Peter. 2016. "Defuzzification Strategies for Fuzzy Classifications of Remote Sensing Data" Remote Sensing 8, no. 6: 467. https://doi.org/10.3390/rs8060467
APA StyleHofmann, P. (2016). Defuzzification Strategies for Fuzzy Classifications of Remote Sensing Data. Remote Sensing, 8(6), 467. https://doi.org/10.3390/rs8060467