
Trying to Break New Ground in Aerial Archaeology



Abstract
:
1. Introduction
2. Image Acquisition
2.1. State-of-the-Art
2.2. Multispectral Nadir Image Acquisition
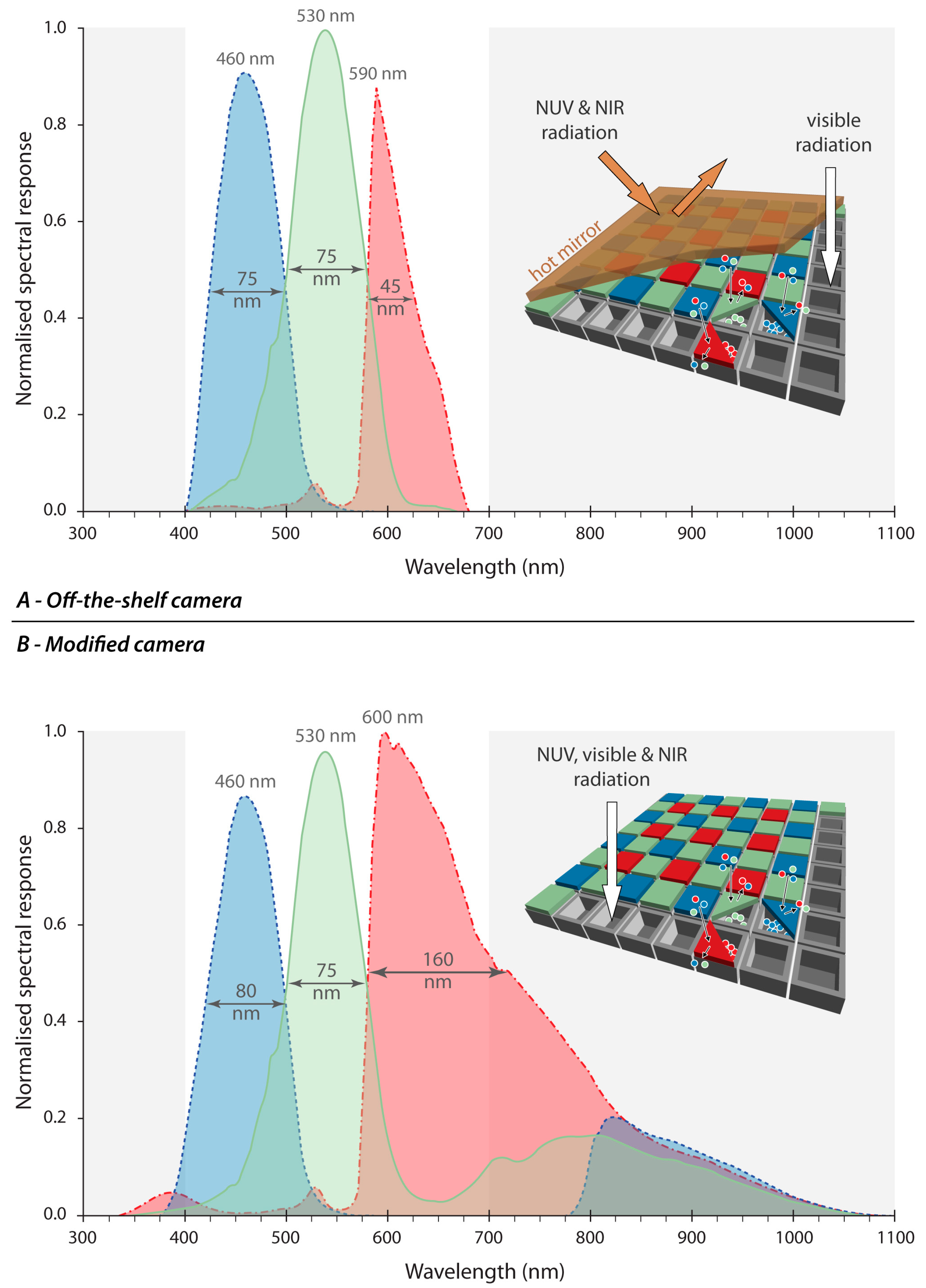
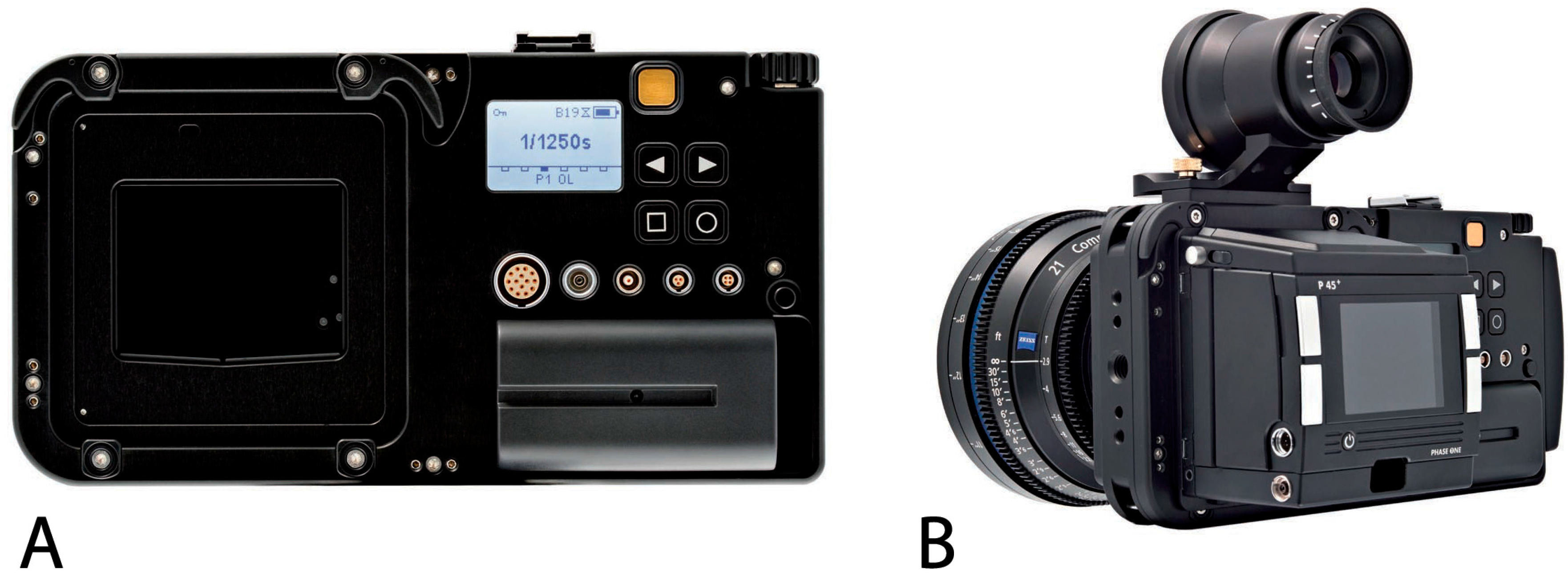
2.2.1. ALPA 12 FPS Achromatic Imaging
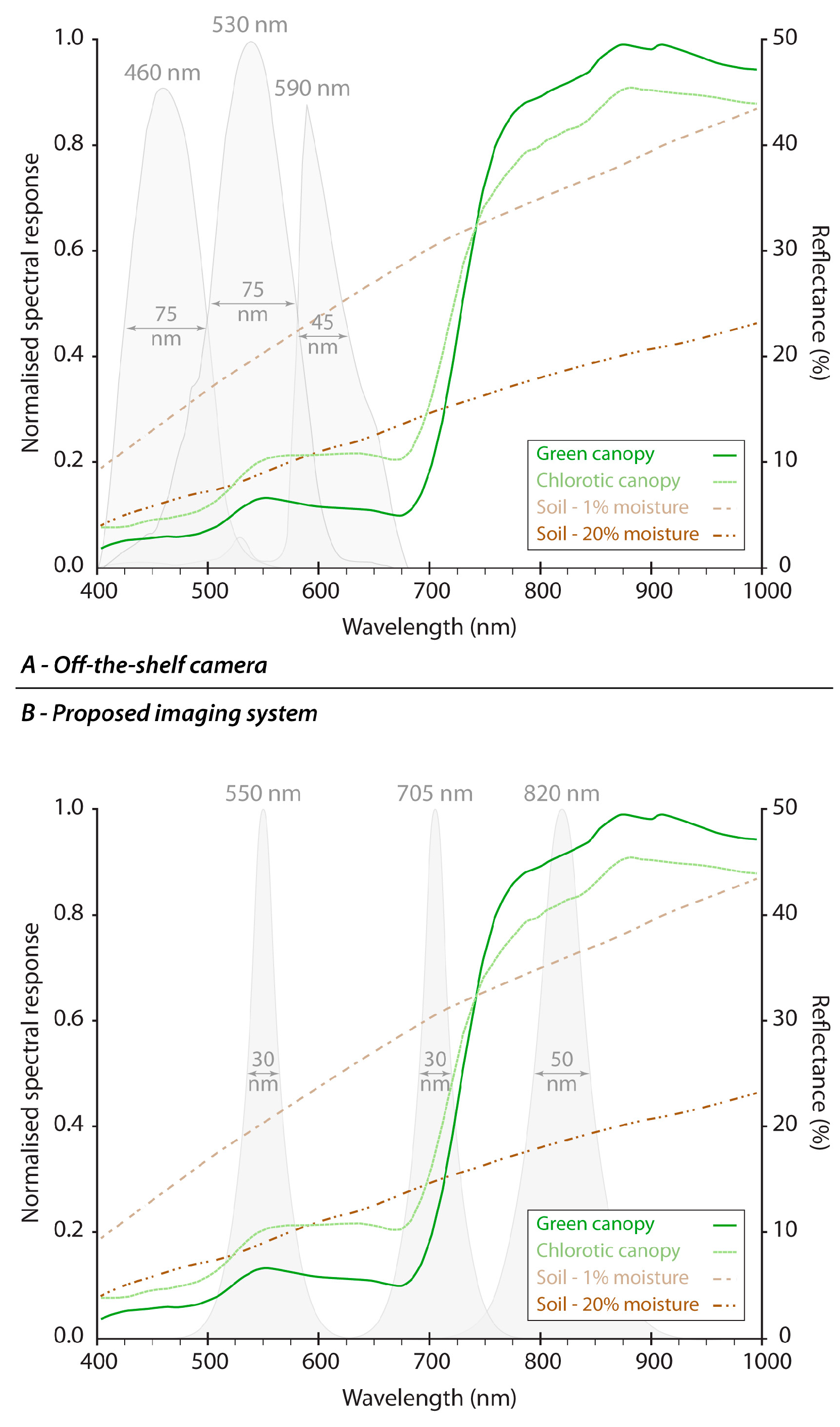
2.2.2. Filters
2.2.3. Conventional Still and Video Imaging
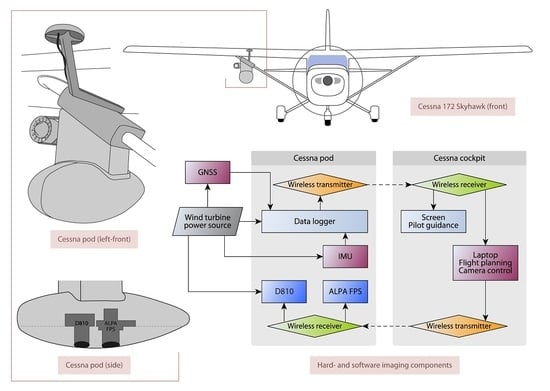
2.2.4. GNSS/IMU
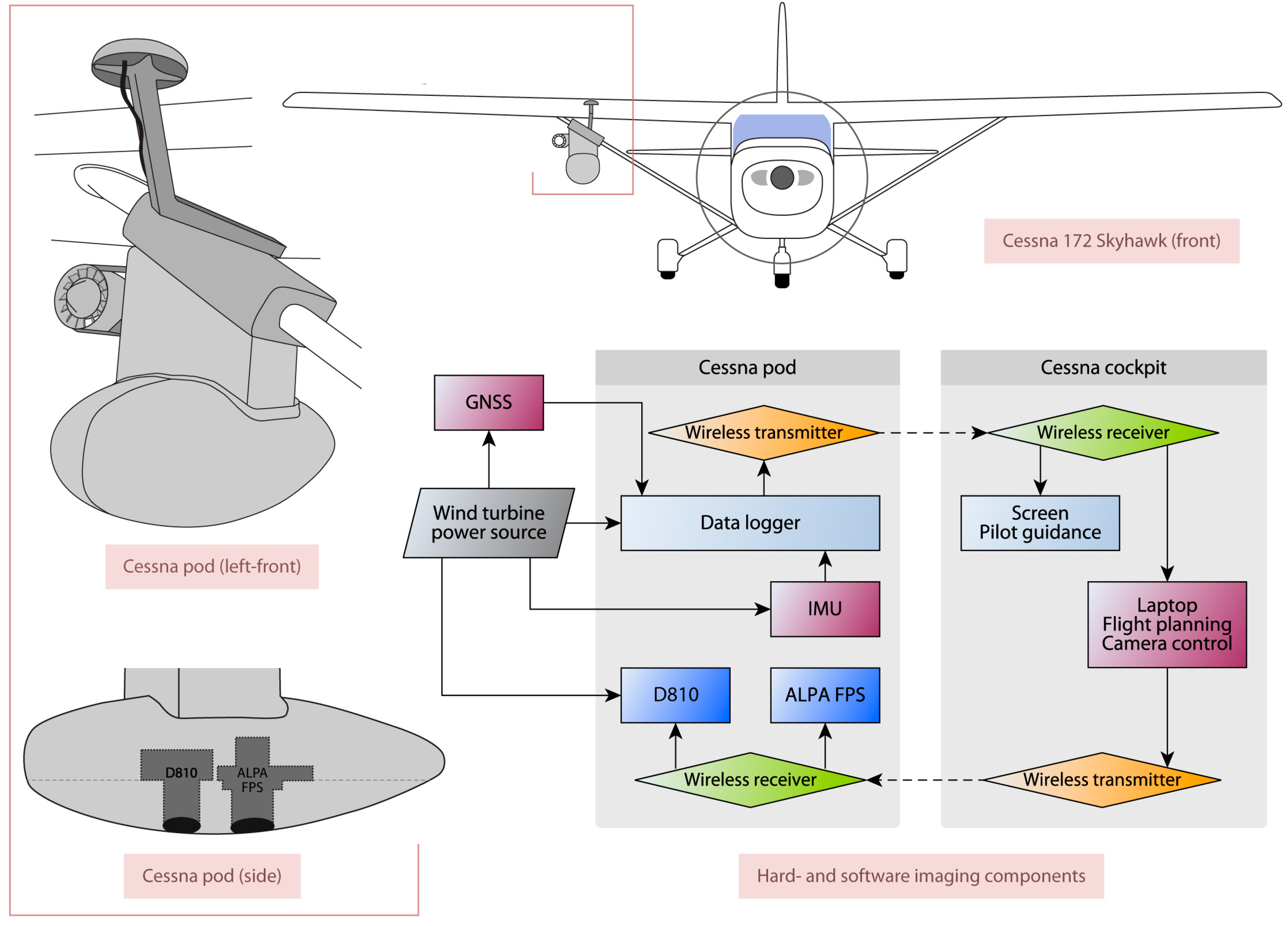
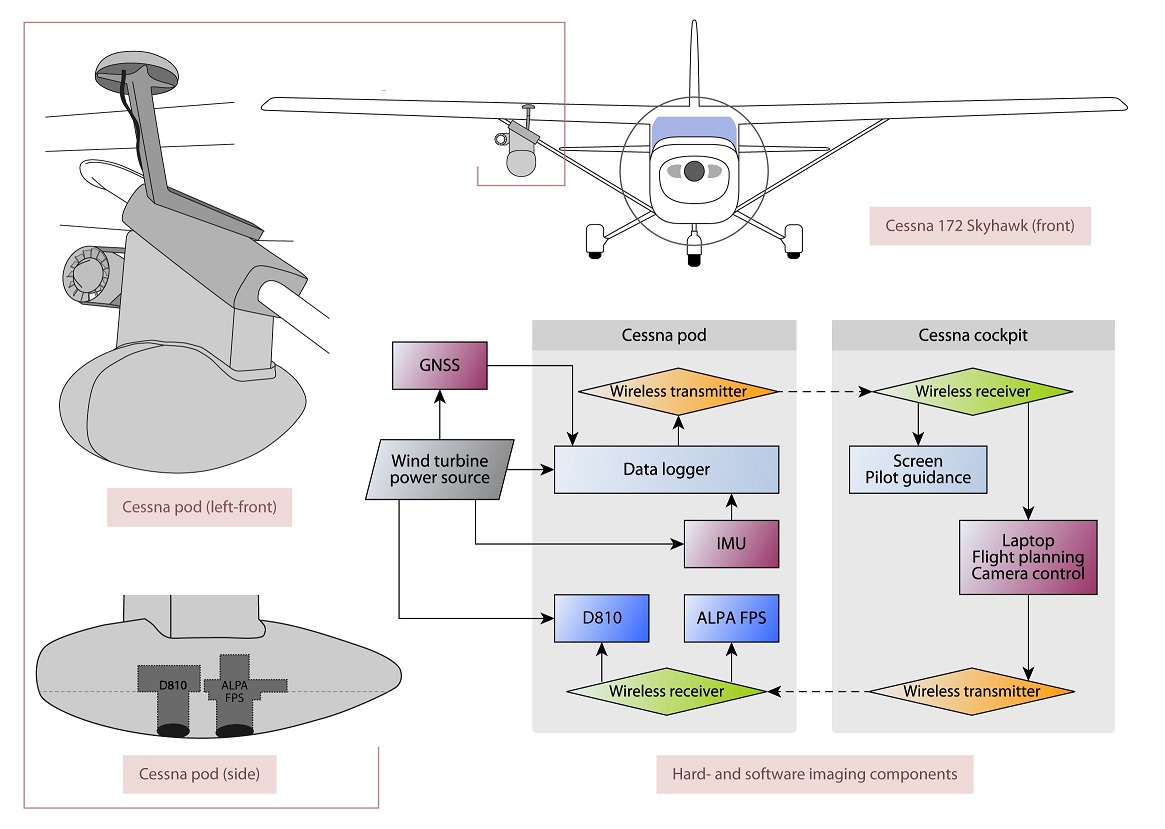
2.2.5. Camera Pod
2.2.6. Flight Management Software
2.2.7. Costs
3. Image Correction and Contrast Optimisation
3.1. Orthorectification
3.2. Radiometric Correction
3.3. Contrast Optimisation
4. Data Management
4.1. Status Quaestionis
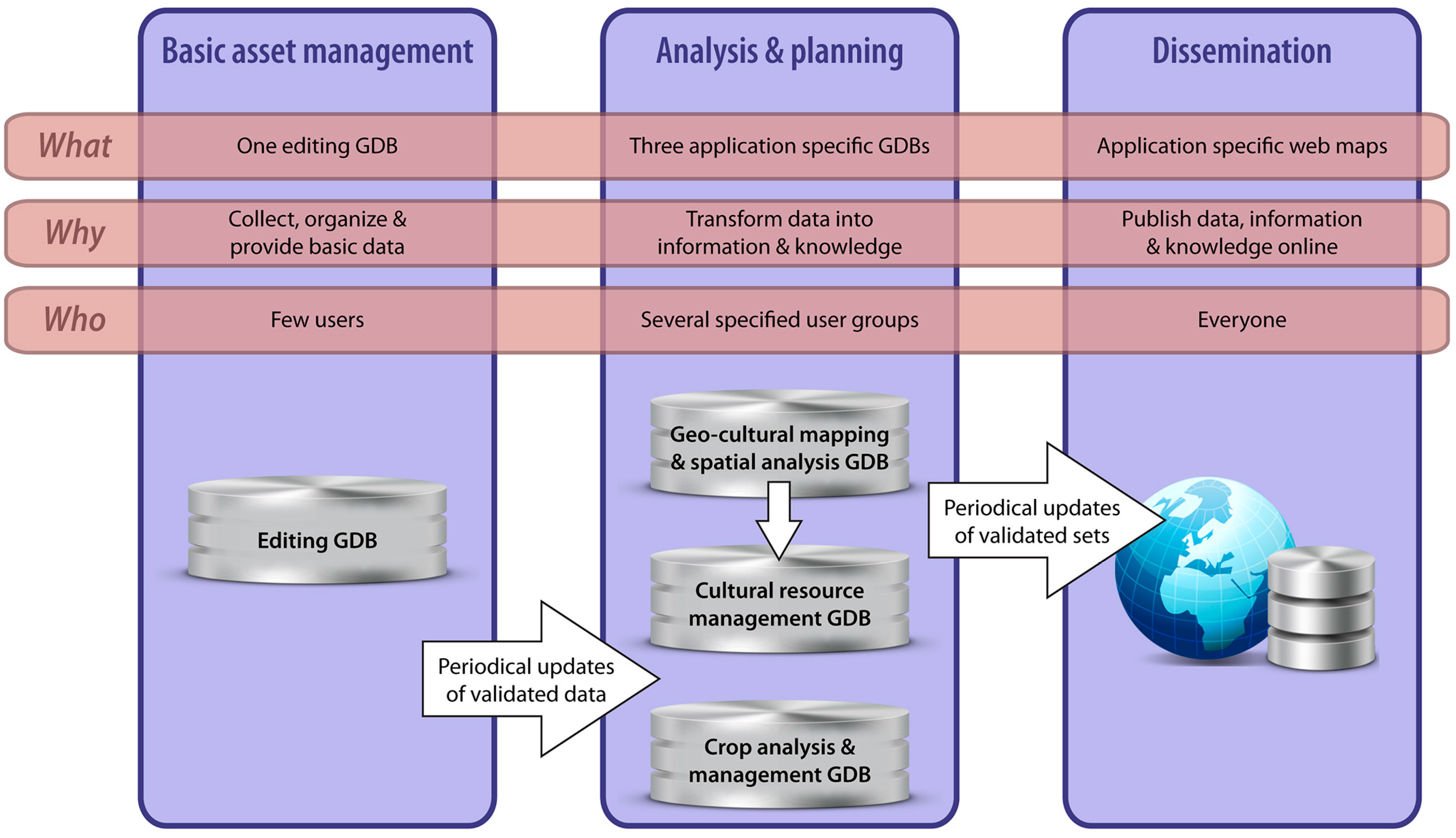
4.2. A Multi-Layered Database Approach
5. Interpretative Mapping
5.1. Status Quaestionis
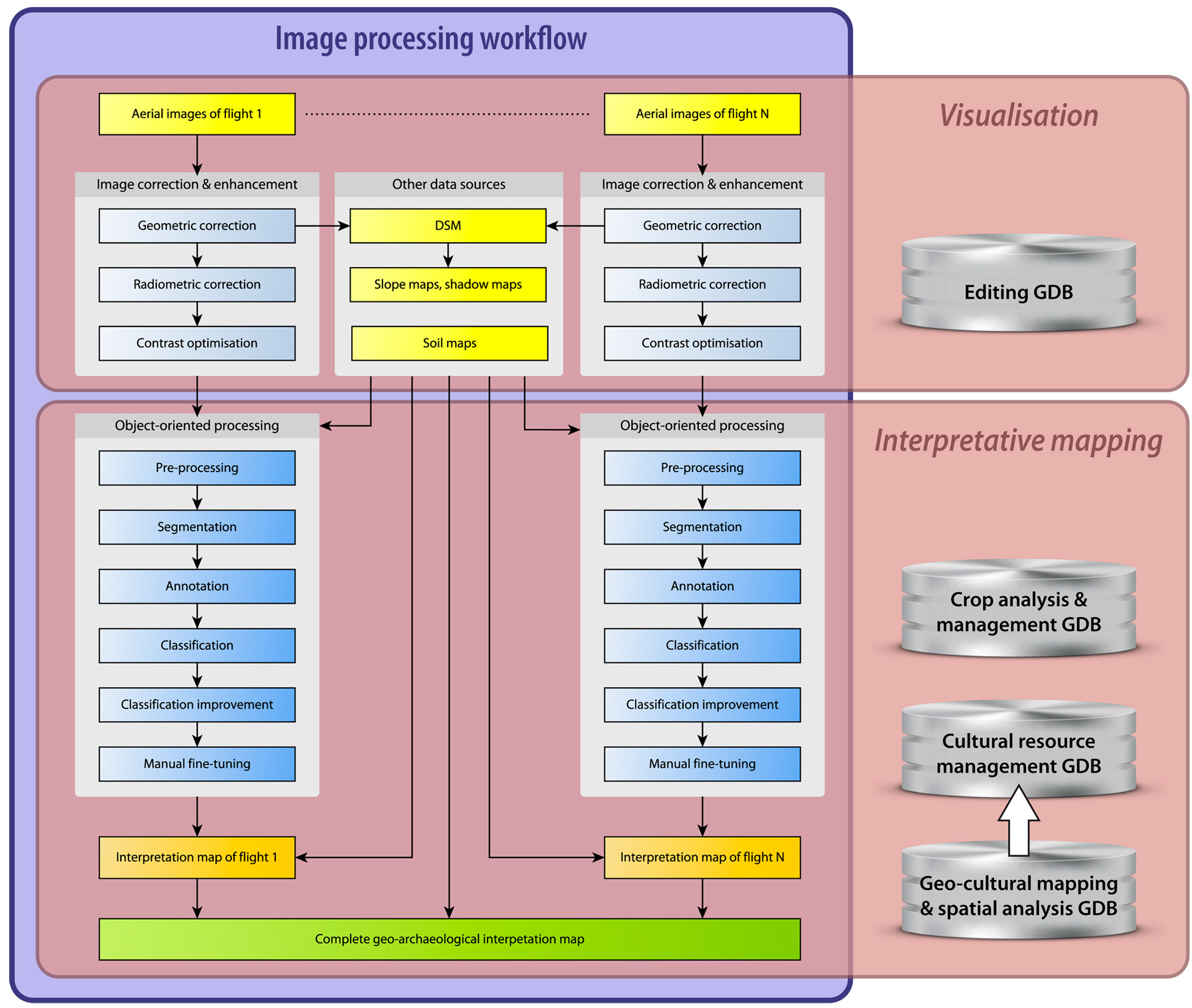
5.2. Harnessing the Power of Object-Based Image Analysis
6. Discussion
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Remondino, F.; Stylianidis, E. Cultural Heritage Documentation with RPAS/UAV. In 3D Recording, Documentation and Management of Cultural Heritage; Stylianidis, E., Remondino, F., Eds.; Whittles Publishing: Dunbeath, UK, 2016; pp. 369–381. [Google Scholar]
- Verhoeven, G. Providing an archaeological bird’s-eye view: An overall picture of ground-based means to execute Low-Altitude Aerial Photography (LAAP) in Archaeology. Archaeol. Prospect. 2009, 16, 233–249. [Google Scholar] [CrossRef]
- Verhoeven, G. Beyond Conventional Boundaries: New Technologies, Methodologies, and Procedures for the Benefit of Aerial Archaeological Data Acquisition and Analysis. Ph.D. Thesis, Ghent University, Ghent, Belgium, 13 May 2009. [Google Scholar]
- Verhoeven, G. Are we there yet? An assessment of archaeological passive airborne optical imaging approaches and some thoughts. J. Archaeol. Sci. 2016, in press. [Google Scholar]
- Reeves, D.M. Aerial photography and archaeology. Am. Antiq. 1936, 2, 102–107. [Google Scholar] [CrossRef]
- Palmer, R. If they used their own photographs they would not take them like that. In From the Air: Understanding Aerial Archaeology; Brophy, K., Cowley, D.C., Eds.; Tempus: Stroud, UK, 2005; pp. 94–116. [Google Scholar]
- Cowley, D.C. Creating the cropmark archaeological record in East Lothian, South-East Scotland. In Prehistory Without Borders: The Prehistoric Archaeology of the Tyne-Forth Region; Crellin, R., Fowler, C., Tipping, R., Eds.; Oxbow Books: Oxford, UK, 2016; pp. 59–70. [Google Scholar]
- Knapp, A.B.; Ashmore, W. Archaeological landscapes: Constructed, conceptualized, ideational. In Archaeologies of Landscape: Contemporary Perspectives; Ashmore, W., Knapp, A.B., Eds.; Blackwell: Malden, MA, USA, 1999; pp. 1–30. [Google Scholar]
- Herring, P. The past informs the future; landscape archaeology and historic landscape characterisation in the UK. In Landscape Archaeology between Art and Science: From a Multi- to an Interdisciplinary Approach; Kluiving, S.J., Gutmann-Bond, E.B., Eds.; Amsterdam University Press: Amsterdam, The Netherlands, 2012; pp. 485–501. [Google Scholar]
- Johnson, M. Ideas of Landscape; Blackwell: Oxford, UK, 2007. [Google Scholar]
- Cleere, H. The evaluation of cultural landscapes: The role of ICOMOS. In Cultural Landscapes of Universal Value: Components of a Global Strategy; von Droste, B., Plachter, H., Rössler, M., Eds.; Gustav Fischer in cooperation with United Nations Educational, Scientific and Cultural Organization: Stuttgart, Germany; New York, NY, USA, 1995; pp. 50–59. [Google Scholar]
- Rössler, M. World heritage cultural landscapes: A UNESCO flagship programme 1992–2006. Landsc. Res. 2006, 31, 333–353. [Google Scholar] [CrossRef]
- Brophy, K.; Cowley, D.C. From the Air: Understanding Aerial Archaeology; Tempus: Stroud, UK, 2005. [Google Scholar]
- Hanson, W.S. The future of aerial archaeology (or are algorithms the answer?). In Remote Sensing for Archaeology and Cultural Heritage Management, Proceedings of the 1st International European Association of Remote Sensing Laboratories Workshop, Rome, Italy, 30 September–4 October 2008; Lasaponara, R., Masini, N., Eds.; Arracne: Rome, Italy, 2008; pp. 47–50. [Google Scholar]
- Cowley, D.C. What kind of gaps? Some approaches to understanding bias in remote sensing data. Archeologia Aerea. Studi di Aerotopografia Archeologica 2013, 7, 76–88. [Google Scholar]
- Rączkowski, W. Why interpretation? Chairman’s Piece. AARGnews 2009, 39, 5–8. [Google Scholar]
- Rączkowski, W. Beyond the technology: Do we need “meta-aerial archaeology”? In Aerial Archaeology: Developing Future Practice; Bewley, R., Rączkowski, W., Eds.; IOS Press: Amsterdam, The Netherlands, 2002; Volume 337, pp. 311–327. [Google Scholar]
- Bradley, R. “To see is to have seen”: Craft traditions in British field archaeology. In The Cultural Life of Images: Visual Representation in Archaeology; Molyneaux, B.L., Ed.; Routledge: London, UK; New York, NY, USA, 1997; pp. 62–72. [Google Scholar]
- Nurminen, K. Oblique aerial photographs—An “old-new” data source. Photogramm. J. Finl. 2015, 24, 1–19. [Google Scholar] [CrossRef]
- Verhoeven, G. BRDF and its impact on aerial archaeological photography. Archaeol. Prospect. 2016, in press. [Google Scholar]
- Palmer, R. Seventy-five Years v. ninety minutes: Implications of the 1996 Bedfordshire vertical aerial survey on our perceptions of clayland archaeology. In Populating Clay Landscapes; Mills, J., Palmer, R., Eds.; Tempus: Stroud, UK, 2007; pp. 88–103. [Google Scholar]
- Palmer, R. Uses of vertical photographs for archaeological studies in parts of lowland England. In Landscapes through the Lens: Aerial Photographs and Historic Environment; Cowley, D.C., Standring, R.A., Abicht, M.J., Eds.; Oxbow Books: Oxford, UK; Oakville, ON, Canada, 2010; Volume 2, pp. 43–54. [Google Scholar]
- Verhoeven, G.; Vermeulen, F. Engaging with the canopy: Multi-dimensional vegetation mark visualisation using archived aerial images. Remote Sens. 2016, 8, 752. [Google Scholar] [CrossRef]
- Bewley, R.; Rączkowski, W. Past achievements and prospects for the future development of aerial archaeology: An introduction. In Aerial Archaeology: Developing Future Practice; Bewley, R., Rączkowski, W., Eds.; IOS Press: Amsterdam, The Netherlands, 2002; Volume 337, pp. 1–8. [Google Scholar]
- Musson, C.; Palmer, R.; Campana, S. Flights into the Past: Aerial Photography, Photo Interpretation and Mapping for Archaeology; Aerial Archaeological Research Group-ArcLand: Heidelberg, Germany, 2013. [Google Scholar]
- Warner, W.S.; Graham, R.W.; Read, R.E. Small Format Aerial Photography; Whittles Publishing: Caithness, UK, 1996. [Google Scholar]
- Aber, J.S.; Marzolff, I.; Ries, J.B. Small-Format Aerial Photography: Principles, Techniques and Geoscience Applications; Elsevier Science: Amsterdam, The Netherlands, 2010. [Google Scholar]
- Har, D.; Son, Y.; Lee, S. SLR Digital camera for forensic photography. In Sensors and Camera Systems for Scientific, Industrial, and Digital Photography Applications V; Blouke, M.M., Sampat, N., Motta, R.J., Eds.; Society for Imaging Science and Technology (IS&T)-The International Society for Optical Engineering (SPIE): Bellingham, WA, USA, 2004; Volume 5301, pp. 276–284. [Google Scholar]
- Verhoeven, G.; Smet, P.F.; Poelman, D.; Vermeulen, F. Spectral characterization of a digital still camera’s NIR modification to enhance archaeological observation. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3456–3468. [Google Scholar] [CrossRef]
- Nakamura, J. Basics of image sensors. In Image Sensors and Signal Processing for Digital Still Cameras; Nakamura, J., Ed.; Taylor & Francis: Boca Raton, FL, USA, 2006; pp. 55–93. [Google Scholar]
- Bayer, B.E. Color. Imaging Array. U.S. Patent 3,971,065, 20 July 1976. [Google Scholar]
- Microsoft. Ultracam. 2015. Available online: https://www.microsoft.com/en-us/ultracam (accessed on 4 March 2016).
- Intergraph Corporation. Image Acquisition. 2016. Available online: http://www.intergraph.com/photo/ia.aspx (accessed on 4 March 2016).
- Leica Geosystems AG. Leica ADS100 Airborne Digital Sensor. 2016. Available online: http://leica-geosystems.com/products/airborne-systems/cameras-large-format/leica-ads100-airborne-digital-sensor (accessed on 4 March 2016).
- Phase One. iXU-R & iXU Aerial Cameras. 2013. Available online: http://industrial.phaseone.com/100MP.aspx (accessed on 4 March 2016).
- Trimble Navigation Limited. Trimble Aerial Camera. 2016. Available online: http://www.trimble.com/Imaging/Trimble-Aerial-Camera.aspx (accessed on 4 March 2016).
- Jacobsen, K. Development of digital aerial cameras. In Proceedings of the ISPRS Istanbul Workshop 2010, WG I/4, Modeling of Optical Airborne and Space Borne Sensors, Istanbul, Turkey, 11–13 October 2010.
- Petrie, G. Systematic oblique aerial photography using multiple digital frame cameras. Photogramm Eng. Remote Sens. 2009, 75, 102–107. [Google Scholar]
- Rupnik, E.; Nex, F.; Remondino, F. Oblique multi-camera systems-orientation and dense matching issues. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-3/W1, 107–114. [Google Scholar] [CrossRef]
- Lemmens, M. Digital oblique aerial cameras (1): A survey of features and systems. GIM Int. Glob. Mag. Geomat. 2014, 28, 20–21, 23–25. [Google Scholar]
- Lemmens, M. Digital Oblique Aerial Cameras (2): A Survey of Features and Systems. GIM Int. Glob. Mag. Geomat. 2014, 28, 20. [Google Scholar]
- Tetracam. Multi-Spectral Imaging Systems. Available online: http://www.tetracam.com/Products1.htm (accessed on 23 February 2016).
- MosaicMill. EnsoMOSAIC Aerial Mapping System. Available online: http://www.mosaicmill.com/products/complete.html (accessed on 1 March 2016).
- SkyIMD Inc. Aerial Imaging Pod. Available online: http://skyimd.com/aerial_imaging_pod.html (accessed on 1 March 2016).
- Geodetska Druzba. GEONISS Airborne Digital Sensor. Available online: http://www.geoniss.com/ (accessed on 2 October 2016).
- Klau Geomatics. Aerial Mapping Systems. Available online: http://geomatics.com.au/ (accessed on 1 July 2016).
- Capture Integration. Phase One IQ260 Achromatic in Action. 2013. Available online: https://captureintegration.com/phase-one-iq260-achromatic-in-action/ (accessed on 30 September 2016).
- ALPA of Switzerland. ALPA 12 FPS, the Matchless. 2015. Available online: https://www.alpa.ch/en/article/alpa-12-fps (accessed on 2 October 2016).
- Beckhusen, D. Technik|ALPA 12 FPS: Die Große Freiheit. Photo Int. 2013, 72–74. [Google Scholar]
- Caduff, R.; Rieke-Zapp, D.H. Registration and visualisation of deformation maps from terrestrial radar Interferometry using photogrammetry and structure from motion. Photogramm. Rec. 2014, 29, 167–186. [Google Scholar] [CrossRef]
- Rieke-Zapp, D.H. A digital medium-format camera for metric applications-Alpa 12 Metric. Photogramm. Rec. 2010, 25, 283–298. [Google Scholar] [CrossRef]
- Verhoeven, G.; Doneus, M. Balancing on the borderline—A low-cost approach to visualize the red-edge shift for the benefit of aerial archaeology. Archaeol. Prospect. 2011, 18, 267–278. [Google Scholar] [CrossRef]
- Bennett, R.; Welham, K.; Hill, R.A.; Ford, A.L.J. The application of vegetation Indices for the prospection of archaeological features in grass-dominated environments. Archaeol. Prospect. 2012, 19, 209–218. [Google Scholar] [CrossRef]
- Agapiou, A.; Hadjimitsis, D.G.; Georgopoulos, A.; Sarris, A.; Alexakis, D.D. Towards an archaeological index: Identification of the spectral regions of stress vegetation due to buried archaeological remains. In Progress in Cultural Heritage Preservation; Ioannides, M., Fritsch, D., Leissner, J., Davies, R., Remondino, F., Caffo, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2012; Volume 7616, pp. 129–138. [Google Scholar]
- Curcio, J.A.; Petty, C.C. The near-infrared absorption spectrum of liquid water. J. Opt. Soc. Am. 1951, 41, 302–304. [Google Scholar] [CrossRef]
- Jones, R.J.; Evans, R. Soil and Crop Marks in the recognition of archaeological sites by air photography. In Aerial Reconnaissance for Archaeology; Wilson, D.R., Ed.; The Council for British Archaeology: London, UK, 1975; Volume 12, pp. 1–11. [Google Scholar]
- Avery, T.E.; Lyons, T.R. Remote Sensing. Aerial and Terrestrial Photography for Archeologists; Cultural Resources Management Division: Washington, DC, USA, 1981. [Google Scholar]
- Rinker, J.N. Some technical aspects of film emulsions in relation to the analysis and interpretation of aerial photographs. In Aerial Reconnaissance for Archaeology; Wilson, D.R., Ed.; The Council for British Archaeology: London, UK, 1975; Volume 12, pp. 32–46. [Google Scholar]
- Lyons, T.R.; Avery, T.E. Remote Sensing: A Handbook for Archaeologists and Cultural Resource Managers; National Park Service: Washington, DC, USA, 1977. [Google Scholar]
- Sandmeier, S.R.; Itten, K.I. A Field Goniometer System (FIGOS) for acquisition of hyperspectral BRDF data. IEEE Trans. Geosci. Remote Sens. 1999, 37, 978–986. [Google Scholar] [CrossRef]
- Hatfield, J.L.; Gitelson, A.A.; Schepers, J.S.; Walthall, C.L. Application of spectral remote sensing for agronomic decisions. AGRON J. 2008, 100. [Google Scholar] [CrossRef]
- Buschmann, C.; Nagel, E. In vivo spectroscopy and internal optics of leaves as basis for remote sensing of vegetation. Int. J. Remote Sens. 1993, 14, 711–722. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Quantitative estimation of chlorophyll-a using reflectance spectra: Experiments with autumn chestnut and maple leaves. J. Photochem. Photobiol. B Biol. 1994, 22, 247–252. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Signature analysis of leaf reflectance spectra: Algorithm development for remote sensing of chlorophyll. J. Plant Physiol. 1996, 148, 494–500. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Gritz, Y.; Merzlyak, M.N. Relationships between leaf chlorophyll content and spectral reflectance and algorithms for non-destructive chlorophyll assessment in higher plant leaves. J. Plant. Physiol. 2003, 160, 271–282. [Google Scholar] [CrossRef] [PubMed]
- Thenkabail, P.S.; Smith, R.B.; De Pauw, E. Evaluation of narrowband and broadband vegetation indices for determining optimal hyperspectral wavebands for agricultural crop characterization. Photogramm. Eng. Remote Sens. 2002, 68, 607–621. [Google Scholar]
- Zhao, D.; Li, J.; Qi, J. Identification of red and NIR spectral regions and vegetative indices for discrimination of cotton nitrogen stress and growth stage. Comput. Electron. Agric. 2005, 48, 155–169. [Google Scholar] [CrossRef]
- Schepers, J.S.; Blackmer, T.M.; Wilhelm, W.W.; Resende, M. Transmittance and reflectance measurements of cornleaves from plants with different nitrogen and water supply. J. Plant Physiol. 1996, 148, 523–529. [Google Scholar] [CrossRef]
- Datt, B. Visible/near infrared reflectance and chlorophyll content in Eucalyptus leaves. Int. J. Remote Sens. 1999, 20, 2741–2759. [Google Scholar] [CrossRef]
- Carter, G.A.; Estep, L. General spectral characteristics of leaf reflectance responses to plant stress and their manifestation at the landscape scale. In From Laboratory Spectroscopy to Remotely Sensed Spectra of Terrestrial Ecosystems; Muttiah, R.S., Ed.; Kluwer Academic Publishers: Dordrecht, The Netherlands, 2002; pp. 271–293. [Google Scholar]
- Carter, G.A. Responses of leaf spectral reflectance to plant stress. Am. J. Bot. 1993, 80, 239–243. [Google Scholar] [CrossRef]
- Carter, G.A.; Cibula, W.; Miller, R.L. Narrow-band reflectance imagery compared with thermal imagery for early detection of plant stress. J. Plant Physiol. 1996, 148, 515–522. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N.; Lichtenthaler, H.K. Detection of red edge position and chlorophyll content by reflectance measurements near 700 nm. J. Plant Physiol. 1996, 148, 501–508. [Google Scholar] [CrossRef]
- Carter, G.A. Reflectance wavebands and indices for remote estimation of photosynthesis and stomatal conductance in pine canopies. Remote Sens. Environ. 1998, 63, 61–72. [Google Scholar] [CrossRef]
- Smith, W.J. Modern Optical Engineering: The Design of Optical Systems; McGraw-Hill: New York, NY, USA, 1966. [Google Scholar]
- Escobar, D.E.; Everitt, J.H.; Noriega, J.R.; Cavazos, I.; Davis, M.R. A twelve-band airborne digital video imaging system (ADVIS). Remote Sens. Environ. 1998, 66, 122–128. [Google Scholar] [CrossRef]
- Everitt, J.H.; Escobar, D.E.; Noriega, J.R.; Cavazos, I.; Davis, M.R. A video system capable of simulating Landsat TM 5, 4, 3 imagery. Remote Sens. Environ. 1997, 62, 40–45. [Google Scholar] [CrossRef]
- Alsadik, B.; Gerke, M.; Vosselman, G. Efficient use of video for 3D modelling of cultural heritage objects. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W4, 1–8. [Google Scholar] [CrossRef]
- Rupnik, E.; Jansa, J. Off-the-shelf videogrammetry—A success story. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-3/W1, 99–105. [Google Scholar] [CrossRef]
- ESRI. ArcGIS Full Motion Video. Available online: http://www.esri.com/products/arcgis-capabilities/imagery/full-motion-video (accessed on 10 March 2016).
- SBG Systems. Ellipse-N: Miniature INS/GPS. 2016. Available online: http://www.sbg-systems.com/products/ellipse-n-miniature-ins-gps (accessed on 10 March 2016).
- Xsens Technologies B.V. MTi-G-710. Available online: https://www.xsens.com/products/mti-g-710/ (accessed on 10 March 2016).
- Cessna-Textron Aviation. Cessna Textron Aviation. Available online: http://cessna.txtav.com/ (accessed on 5 October 2016).
- Johanneum Research. Remote Sensing and Evironmental Monitoring. Available online: https://www.joanneum.at/en/digital/research-areas/remote-sensing-and-evironmental-monitoring.html (accessed on 7 October 2016).
- Sandau, R. (Ed.) Digital Airborne Camera: Introduction and Technology; Springer: Dordrecht, The Netherlands, 2010.
- TopoFlight Systems. Available online: http://www.topoflight.com/ (accessed on 19 February 2016).
- Verhoeven, G.; Doneus, M.; Briese, C.; Vermeulen, F. Mapping by matching: A computer vision-based approach to fast and accurate georeferencing of archaeological aerial photographs. J. Archaeol. Sci. 2012, 39, 2060–2070. [Google Scholar] [CrossRef]
- Wolf, P.R.; Dewitt, B.A. Elements of Photogrammetry with Applications in GIS, 3rd ed.; McGraw-Hill: Boston, MA, USA, 2000. [Google Scholar]
- Trimble Navigation Limited. Trimble Inpho. Available online: http://www.trimble.com/imaging/inpho.aspx (accessed on 4 March 2016).
- PCI Geomatics. Geomatica Professional. Available online: http://www.pcigeomatics.com/software/geomatica/professional (accessed on 4 March 2016).
- Hartley, R.; Zisserman, A. Multiple View Geometry in Computer Vision, 2nd ed.; Cambridge University Press: Cambridge, UK, 2003. [Google Scholar]
- Ullman, S. The interpretation of structure from motion. Proc. R. Soc. B Biol. Sci. 1979, 203, 405–426. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: New York, NY, USA, 2011. [Google Scholar]
- Remondino, F.; Spera, M.G.; Nocerino, E.; Menna, F.; Nex, F. State of the art in high density image matching. Photogramm. Rec. 2014, 29, 144–166. [Google Scholar] [CrossRef]
- Haala, N. The landscape of dense image matching algorithms. In Photogrammetric Week 2013; Fritsch, D., Ed.; Institut für Photogrammetrie (IFP): Stuttgart, Germany, 2013; pp. 271–284. [Google Scholar]
- Goesele, M.; Curless, B.; Seitz, S.M. Multi-view stereo revisited. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; IEEE Computer Society Press: Los Alamitos, CA, USA, 2006; Volume 2, pp. 2402–2409. [Google Scholar]
- Karel, W.; Doneus, M.; Verhoeven, G.; Briese, C.; Ressl, C.; Pfeifer, N. Oriental: Automatic geo-referencing and ortho-rectification of archaeological aerial photographs. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W1, 175–180. [Google Scholar] [CrossRef]
- Karel, W.; Doneus, M.; Briese, C.; Verhoeven, G.; Pfeifer, N. Investigation on the Automatic Geo-Referencing of Archaeological UAV Photographs by Correlation with Pre-Existing Ortho-Photos. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-5, 307–312. [Google Scholar] [CrossRef]
- Lo Brutto, M.; Borruso, A.; D’Argenio, A. UAV systems for photogrammetric data acquisition of archaeological sites. Int. J. Hérit. Digit. Era 2012, 1, 7–13. [Google Scholar] [CrossRef] [Green Version]
- Scollar, I.; Giradeau-Montaut, D. Georeferenced orthophotos and DTMs from multiple oblique images. AARGnews 2012, 44, 12–17. [Google Scholar]
- Verhoeven, G.; Taelman, D.; Vermeulen, F. Computer vision-based orthophoto mapping of complex archaeological sites: The ancient quarry of Pitaranha (Portugal-Spain). Archaeometry 2012, 54, 1114–1129. [Google Scholar] [CrossRef]
- Verhoeven, G. Taking computer vision aloft—Archaeological three-dimensional reconstructions from aerial photographs with PhotoScan. Archaeol. Prospect. 2011, 18, 67–73. [Google Scholar] [CrossRef]
- Costa-García, J.M.; Casal García, R. Fotografía aérea histórica, satelital moderna y LiDAR aéreo en algunos recintos militares romanos de Castilla y León. Portvgalia Nova Série 2015, 36, 143–158. [Google Scholar]
- Applanix Corporation. POSAV. 2016. Available online: http://www.applanix.com/products/airborne/posav.html (accessed on 4 May 2016).
- IGI mbH. AEROcontrol. 2016. Available online: http://www.igi.eu/aerocontrol.html (accessed on 4 March 2016).
- Doneus, M.; Wieser, M.; Verhoeven, G.; Karel, W.; Fera, M.; Pfeifer, N. Automated archiving of archaeological aerial images. Remote Sens. 2016, 8, 209. [Google Scholar] [CrossRef] [Green Version]
- Applanix Corporation. Direct Mapping Solutions for UAVs. 2016. Available online: http://www.applanix.com/products/dms-uavs.htm (accessed on 28 September 2016).
- Mian, O.; Lutes, J.; Lipa, G.; Hutton, J.J.; Gavelle, E.; Borghini, S. Direct georeferencing on small unmanned aerial platforms for improved reliability and accuracy of mapping without the need for ground control points. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-1/W4, 397–402. [Google Scholar] [CrossRef]
- Richter, R.; Schläpfer, D. Atmospheric/topographic correction for airborne imagery. ATCOR-4 User Guide. Version 6.2 BETA. Available online: http://www.dlr.de/eoc/Portaldata/60/Resources/dokumente/5_tech_mod/atcor4_manual_2012.pdf (accessed on 3 May 2016).
- Schowengerdt, R.A. Remote Sensing: Models and Methods for Image Processing, 3rd ed.; Academic Press: Burlington, MA, USA, 2007. [Google Scholar]
- Schläpfer, D.; Richter, R.; Hueni, A. Recent developments in operational atmospheric and radiometric correction of hyperspectral imagery. In Proceedings of the 6th European Association of Remote Sensing Laboratories SIG IS Workshop, Imaging Spectroscopy: Innovative Tool for Scientific and Commercial Environmental Applications, Tel-Aviv University, Tel-Aviv, Israel, 16–19 March 2009; EARSeL: Tel-Aviv, Israel, 2009. [Google Scholar]
- ITT Visual Information Solutions. ENVI—Atmospheric Correction Module: QUAC and FLAASH User’s Guide. Available online: http://www.exelisvis.com/portals/0/pdfs/envi/Flaash_Module.pdf (accessed on 9 September 2016).
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Zamperoni, P. Image enhancement. In Advances in Imaging and Electron Physics. Volume 92; Hawkes, P.W., Ed.; Academic Press: San Diego, CA, USA, 1995; pp. 1–77. [Google Scholar]
- Hatfield, J.L.; Prueger, J.H. Value of using different vegetative indices to quantify agricultural crop characteristics at different growth stages under varying management practices. Remote Sens. 2010, 2, 562–578. [Google Scholar] [CrossRef]
- Le Maire, G.; François, C.; Dufrêne, E. Towards universal broad leaf chlorophyll indices using PROSPECT simulated database and hyperspectral reflectance measurements. Remote Sens. Environ. 2004, 89, 1–28. [Google Scholar] [CrossRef]
- Boochs, F.; Kupfer, G.; Dockter, K.; Kühbauch, W. Shape of the red edge as vitality indicator for plants. Int. J. Remote Sens. 1990, 11, 1741–1753. [Google Scholar] [CrossRef]
- Ustin, S.L.; Roberts, D.A.; Gamon, J.A.; Asner, G.P.; Green, R.O. Using imaging spectroscopy to study ecosystem processes and properties. BioScience 2004, 54, 523–534. [Google Scholar] [CrossRef]
- Al-amri, S.S. Contrast stretching enhancement in remote sensing image. BIOINFO Sens. Netw. 2011, 1, 6–9. [Google Scholar]
- Zuiderveld, K. Contrast limited adaptive histogram equalization. In Graphics Gems IV; Heckbert, P.S., Ed.; Academic Press Professional: Boston, MA, USA, 1994; pp. 474–485. [Google Scholar]
- Exelis Visual Information Solutions. ENVI. Available online: http://www.exelisvis.com/IntelliEarthSolutions/GeospatialProducts/ENVI.aspx (accessed on 8 March 2016).
- Goetz, A.F.H. Three decades of hyperspectral remote sensing of the Earth: A personal view. Remote Sens. Environ. 2009, 113, S5–S16. [Google Scholar] [CrossRef]
- Cowley, D.C. What do the patterns mean? Archaeological distributions and bias in survey data. In The Age of Sensing; Forte, M., Campana, S., Eds.; Springer: New York, NY, USA, 2016. [Google Scholar]
- Lock, G.R.; Stančič, Z. (Eds.) Archaeology and Geographical Information Systems: A European Perspective; Taylor & Francis: London, UK, 1995.
- Conolly, J.; Lake, M.W. Geographical Information Systems in Archaeology; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Wheatley, D.; Gillings, M. Spatial Technology and Archaeology: The Archaeological Applications of GIS; Taylor & Francis: New York, NY, USA, 2002. [Google Scholar]
- Tennant, E.W. A sample geodatabase structure for managing archaeological data and resources with ArcGIS. Tech. Briefs Hist. Archaeol. 2007, 2, 12–14. [Google Scholar]
- International Organization for Standardization. ISO 21127:2006: Information and Documentation—A Reference Ontology for the Interchange of Cultural Heritage Information; ICS: 3.524.030; International Organization for Standardization: Geneva, Switzerland, 2010. [Google Scholar]
- Cripps, P.; Greenhalgh, A.; Fellows, D.; May, K.; Robinson, D. Ontological Modelling of the Work of the Centre for Archaeology. CIDOC CRM Technical Paper. 2004. Available online: http://www.cidoc-crm.org/docs/Ontological_Modelling_Project_Report_%20Sep2004.pdf (accessed on 27 August 2013).
- CRM. The CIDOC Conceptual Reference Model. Available online: http://www.cidoc-crm.org/ (accessed on 16 August 2016).
- International Organization for Standardization. ISO 21127:2014: Information and Documentation—A Reference Ontology for the Interchange of Cultural Heritage Information; ICS: 3.524.030; International Organization for Standardization: Geneva, Switzerland, 2014. [Google Scholar]
- Binding, C.; May, K.; Tudhope, D. Semantic Interoperability in Archaeological Datasets: Data Mapping and Extraction Via the CIDOC CRM. In Research and Advanced Technology for Digital Libraries, Proceedings of the 12th European Conference, ECDL 2008, Aarhus, Denmark, 14–19 September 2008; Christensen-Dalsgaard, B., Castelli, D., Jurik, B.A., Lippincott, J., Eds.; Springer: Berlin, Germany, 2008; Volume 5173, pp. 280–290. [Google Scholar]
- Hiebel, G.; Hanke, K.; Hayek, I. Methodology for CIDOC CRM based data integration with spatial data. In Fusion of Cultures, In Proceedings of the 38th Annual Conference on Computer Applications and Quantitative Methods in Archaeology (CAA 2010), Granada, Spain, 6–9 April 2010; Contreras, F., Farjas, M., Melero, F.J., Eds.; Archaeopress: Granada, Spain, 2010; Volume 2494, pp. 1–8. [Google Scholar]
- Van Leusen, M.; van Gessel, S. Towards 3D GIS: Notes from the 2012 CAA-NL/DE chapter session “from 2.5 to 3 spatial dimensions”. In The Three Dimensions of Archaeology, Proceedings of the XVII Union Internationale des Sciences Préhistoriques et Protohistoriques World Congress, Volume 7/Sessions A4b and A12, Burgos, Spain, 1–7 September 2016; Kamermans, H., de Neef, W., Piccoli, C., Posluschny, A.G., Scopigno, R., Eds.; Archaeopress Publishing: Oxford, UK, 2016; pp. 33–37. [Google Scholar]
- Qiang, Y. Modelling Temporal Information in a Two-Dimensional Space: A Visualization Perspective. Ph.D. Thesis, Ghent University, Ghent, Belgium, 2012. [Google Scholar]
- IntraSIS. IntraSIS—Intra-Site Information System. Available online: http://www.intrasis.com (accessed on 4 March 2016).
- Wu, L.; Zhu, C.; Wang, X. Design and realization on the object-oriented remote sensing archaeological information system. In Proceedings of the 2011 International Conference on Remote Sensing, Environment and Transportation Engineering (RSETE), Nanjing, China, 24–26 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 3050–3053. [Google Scholar]
- Doneus, M.; Fornwagner, U.; Kiedl, C. APIS-Archaeological Prospection Information System. In Archaeological Prospection, Proceedings of the 10th International Conference on Archaeological Prospection, Vienna, Austria, 29 May 2013–2 June 2013; Neubauer, W., Trinks, I., Salisbury, R.B., Einwögerer, C., Eds.; Austrian Academy of Sciences: Vienna, Austria, 2013; pp. 317–318. [Google Scholar]
- Winton, H.; Boutwood, Y.; Horne, P. Interpretation and Mapping from Aerial Photographs and Other Aerial Remote Sensed Dat. MoRPHE Project Planning Note 7. Swindon, UK, 2012. Available online: http://www.english-heritage.org.uk/publications/morphe-project-planning-note-7/morphe-ppn7.pdf (accessed on 10 September 2013).
- Environmental Systems Research Institute. Geodatabase Storage in Relational Databases. Available online: http://desktop.arcgis.com/en/arcmap/10.3/manage-data/gdb-architecture/geodatabase-storage-in-relational-databases.htm (accessed on 7 October 2016).
- The PostgreSQL Global Development Group. PostgreSQL. Available online: http://www.postgresql.org/ (accessed on 6 October 2016).
- PostGIS Project Steering Committee. PostGIS, Spatial and Geographic objects for PostgreSQL. Available online: http://postgis.net/ (accessed on 1 October 2016).
- Environmental Systems Research Institute. Using the PostGIS Geometry Type. Available online: http://webhelp.esri.com/arcgisdesktop/9.3/index.cfm?id=2777&pid=2762&topicname=Using_the_PostGIS_geometry_type (accessed on 26 August 2016).
- Butler, J.A. Designing Geodatabases for Transportation, 1st ed.; Environmental Systems Research Institute Press: Redlands, CA, USA, 2008. [Google Scholar]
- Pfoser, D.; Hadzilacos, T.; Faradouris, N.; Kyrimis, K. Spatial data management aspects in archaeological excavation documentation. In The European Information Society: Leading the Way with Geo-Information; Fabrikant, S.I., Wachowicz, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 287–302. [Google Scholar]
- ArcTron 3D. aSPECT 3D. 2016. Available online: http://aspect.arctron.de/ (accessed on 29 September 2016).
- Nyerges, T.L.; Jankowski, P. Regional and Urban GIS: A Decision Support Approach; Guilford Press: New York, NY, USA, 2010. [Google Scholar]
- European Commission. INSPIRE-Infrastructure for Spatial Information in the European Community. 2016. Available online: http://inspire.jrc.ec.europa.eu/ (accessed on 8 October 2016).
- ESRI. ArcGIS for INSPIRE. 2016. Available online: http://www.esri.com/software/arcgis/arcgis-for-inspire (accessed on 7 October 2016).
- Pasquinucci, M.; Trément, F. (Eds.) Non-Destructive Techniques Applied to Landscape Archaeology; Oxbow Books: Oxford, UK, 2000.
- Cheetham, P.N. Noninvasive Subsurface mapping techniques, satellite and aerial imagery in landscape archaeology. In Handbook of Landscape Archaeology, 1st ed.; David, B., Thomas, J., Eds.; Left Coast: Walnut Creek, CA, USA, 2010; pp. 562–582. [Google Scholar]
- Doneus, M. Die hinterlassene Landschaft-Prospektion und Interpretation in der Landschaftsarchäologie; Verlag der Österreichischen Akademie der Wissenschaften: Wien, Austria, 2013. [Google Scholar]
- Cowley, D.C. In with the new, out with the old? Auto-extraction for remote sensing archaeology. In Proceedings of the Remote Sensing of the Ocean, Sea Ice, Coastal Waters, and Large Water Regions 2012 Conference, Edinburgh, UK, 26–27 September 2012; Bostater, C.R., Jr., Mertikas, S.P., Neyt, X., Nichol, C., Cowley, D.C., Bruyant, J.P., Eds.; SPIE: Bellingham, WA, USA, 2012; Volume 8532. [Google Scholar]
- Blaschke, T.; Strobl, J. What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. GeoInform. Syst. 2001, 06, 12–17. [Google Scholar]
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Blaschke, T.; Lang, S.; Lorup, E.; Strobl, J.; Zeil, P. Object-oriented image processing in an Integrated GIS/remote sensing environment and perspectives for environmental applications. In Umweltinformatik ‘00: Umweltinformation für Planung, Politik und Öffentlichkei: 12. Internationales Symposium “Informatik für den Umweltschutz” der Gesellschaft für Informatik (GI), Bonn 2000; Cremers, A.B., Greve, K., Eds.; Metropolis Verlag: Marburg, Germany, 2000; Volume 2, pp. 555–570. [Google Scholar]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Queiroz Feitosa, R.; van der Meer, F.; van der Werff, H.; van Coillie, F.M.B.; et al. Geographic object-based image analysis—Towards a new paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef] [PubMed]
- Hay, G.J.; Castilla, G. Geographic Object-Based Image Analysis (GEOBIA): A new name for a new discipline. In Object-Based Image Analysis: Spatial Concepts for Knowledge-Driven Remote Sensing Applications; Blaschke, T., Lang, S., Hay, G., Eds.; Springer: Berlin, Germany, 2008; pp. 75–89. [Google Scholar]
- Hussain, M.; Chen, D.; Cheng, A.; Wei, H.; Stanley, D. Change detection from remotely sensed images: From pixel-based to object-based approaches. ISPRS J. Photogramm. Remote Sens. 2013, 80, 91–106. [Google Scholar] [CrossRef]
- Sevara, C.; Pregesbauer, M.; Doneus, M.; Verhoeven, G.; Trinks, I. Pixel versus object—A comparison of strategies for the semi-automated mapping of archaeological features using airborne laser scanning data. J. Archaeol. Sci. Rep. 2016, 5, 485–498. [Google Scholar]
- Dey, V.; Zhang, Y.; Zhong, M. A review on image segmentation techniques with remote sensing perspective. In Proceedings of the ISPRS Technical Commission VII Symposium, 100 Years ISPRS. Advancing Remote Sensing Science, Vienna, Austria, 5–7 July 2010; Wagner, W., Székely, B., Eds.; XXXVIII-Part 7A. pp. 31–42.
- Baatz, M.; Schäpe, A. Multiresolution segmentation: An optimization approach for high quality multi-scale image segmentation. In Beiträge zum AGIT-Symposium Salzburg 2000; Strobl, J., Blaschke, T., Griesebner, G., Eds.; Wichmann: Heidelberg, Germany, 2000; Volume 12, pp. 12–23. [Google Scholar]
- Trimble. eCognition® Developer 8.7.1. Reference Book; Trimble Germany GmbH: Munich, Germany, 2012. [Google Scholar]
- Sevara, C.; Pregesbauer, M. Archaeological feature classification: An object oriented approach. SE Eur. J. Earth Obs. Geomat. 2014, 3, 139–143. [Google Scholar]
- Styers, D.M.; Moskal, L.M.; Richardson, J.J.; Halabisky, M.A. Evaluation of the contribution of LiDAR data and postclassification procedures to object-based classification accuracy. J. Appl. Remote Sens. 2014, 8, 83529. [Google Scholar] [CrossRef]
- Zou, X.; Zhao, G.; Li, J.; Yang, Y.; Fang, Y. Object based image analysis combining high spatial resolution imagery and laser point clouds for urban land cover. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B3, 733–739. [Google Scholar] [CrossRef]
- Inglada, J.; Christophe, E. The Orfeo Toolbox remote sensing image processing software. In Proceedings of the 2009 IEEE International Geoscience and Remote Sensing Symposium, Cape Town, South Africa, 12–17 July 2009; IEEE Geoscience and Remote Sensing Society: Piscataway, NJ, USA, 2009; Volume V, pp. IV-733–IV-736. [Google Scholar]
- Costa, G.A.O.P.D.; Feitosa, R.; Fonseca, L.M.G.; Oliveira, D.A.B.; Ferreira, R.D.S.; Castejon, E.F. Knowledge-based interpretation of remote sensing data with the Inter IMAGE system: Major characteristics and recent developments. In Proceedings of the GEOBIA 2010: Geographic Object-Based Image Analysis, Ghent, Belgium, 29 June–2 July 2010; Addink, E.A., van Coillie, F.M.B., Eds.; XXXVIII-4/C7.
- Teodoro, A.C.; Araujo, R. Comparison of performance of object-based image analysis techniques available in open source software (Spring and Orfeo Toolbox/Monteverdi) considering very high spatial resolution data. J. Appl. Remote Sens. 2016, 10, 16011. [Google Scholar] [CrossRef]
- Trimble. eCognition. 2016. Available online: http://www.ecognition.com/ (accessed on 2 March 2016).
- Opitz, R.S.; Cowley, D.C. (Eds.) Interpreting Archaeological Topography: 3D Data, Visualisation and Observation; Oxbow Books: Oxford, UK; Oakville, ON, Canada, 2013.
- Bennett, R.; Cowley, D.C.; De Laet, V. The data explosion: Tackling the taboo of automatic feature recognition in airborne survey data. Antiquity 2014, 88, 896–905. [Google Scholar] [CrossRef]
- Palmer, R. Aerial archaeology and sampling. In Sampling in Contemporary British Archaeology; Cherry, J.F., Gamble, C., Shennan, S., Eds.; British Archaeological Reports: Oxford, UK, 1978; Volume 50, pp. 129–148. [Google Scholar]
- Cowley, D.C. A case study in the analysis of patterns of aerial reconnaissance in a lowland area of southwest Scotland. Archaeol. Prospect. 2002, 9, 255–265. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Verhoeven, G.; Sevara, C. Trying to Break New Ground in Aerial Archaeology. Remote Sens. 2016, 8, 918. https://doi.org/10.3390/rs8110918
Verhoeven G, Sevara C. Trying to Break New Ground in Aerial Archaeology. Remote Sensing. 2016; 8(11):918. https://doi.org/10.3390/rs8110918
Chicago/Turabian StyleVerhoeven, Geert, and Christopher Sevara. 2016. "Trying to Break New Ground in Aerial Archaeology" Remote Sensing 8, no. 11: 918. https://doi.org/10.3390/rs8110918