
Tropical Forests of Réunion Island Classified from Airborne Full-Waveform LiDAR Measurements

Abstract
:
1. Introduction
2. Materials and Methods
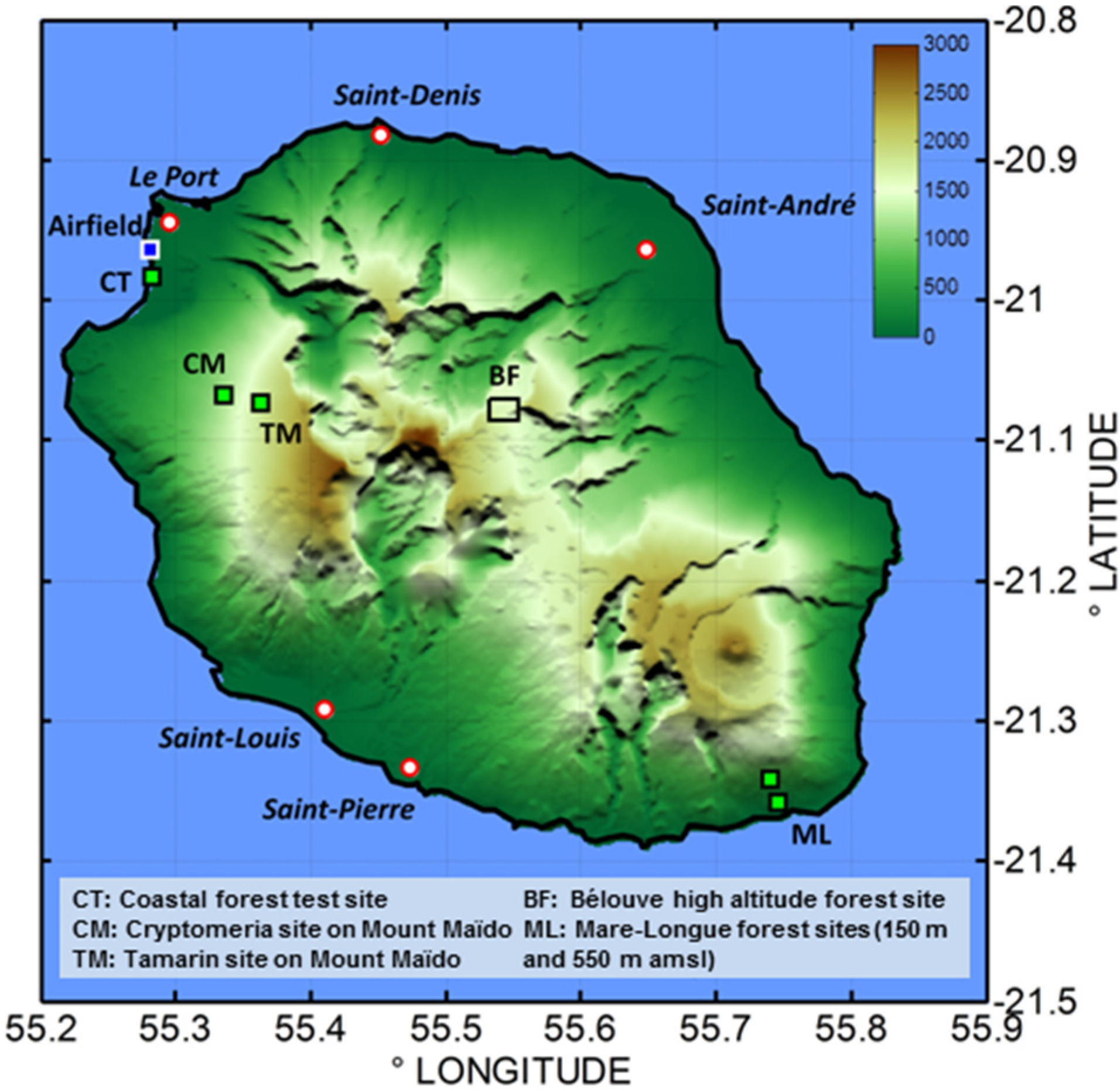
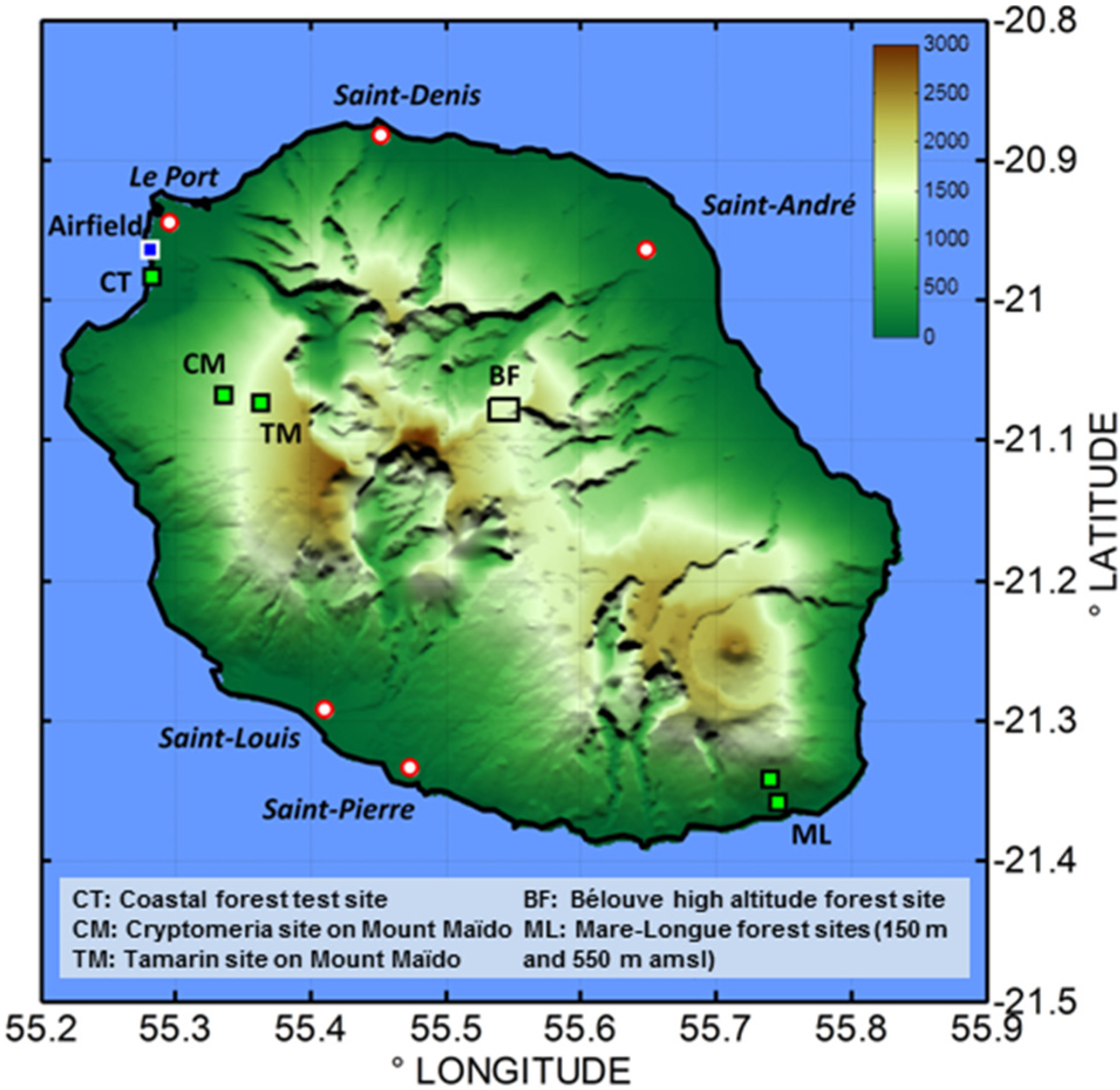
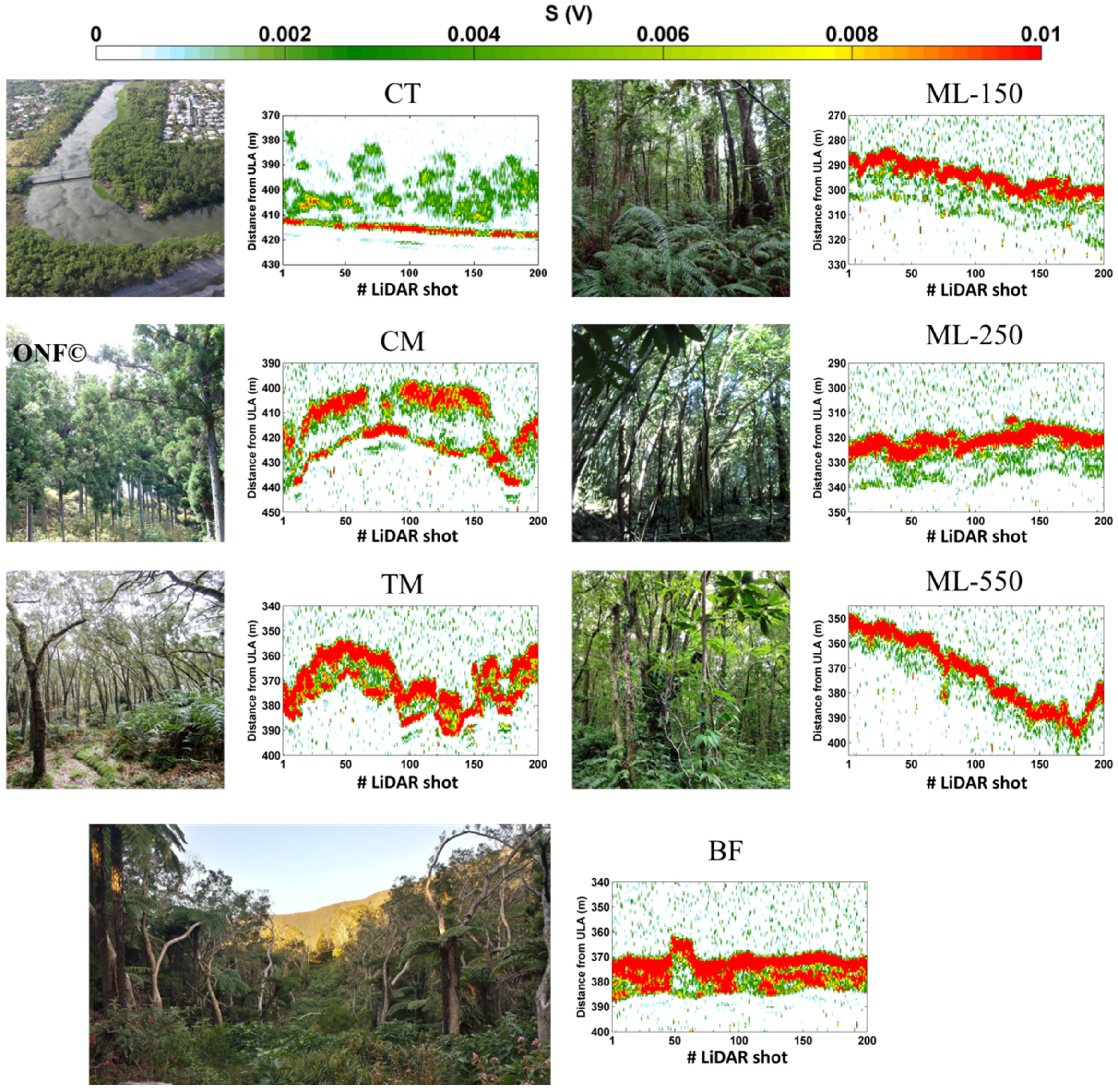
2.1. Study Sites

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Forest Sites | Altitude (m·amsl 1) | Dominant Tree Species | Sub-Plot | LiDAR Cover | Laser Shots | Ground Slope > 30° | ||
|---|---|---|---|---|---|---|---|---|
| Exotic Vegetation | Coastal forest (CT) | 10 | Only exotic vegetation | - | 22 ha | 2046 | 0.06% | |
| Tropical Montane Cloud Forests | Cryptomeria (CM) | 1230 | Cryptomeria japonica | 40 m × 40 m | 10 ha | 9646 | 22.6% | |
| Tamarind (TM) | 1750 | Acacia heterophylla | 40 m × 40 m | 10 ha | 14,738 | 12% | ||
| Bélouve (BF) | 1600 | Acacia heterophylla | - | 400 ha | 48,410 | 7% | ||
| Tropical Lowland Rainforest | Mare-Longue (ML) | ML-150 | 150 | Labourdonnaisia calophylloides | 50 m × 100 m | 2.8 ha | 9808 | 2% |
| ML-250 | 250 | 50 m × 50 m | 1.4 ha | 1552 | 0.2% | |||
| ML-550 | 550 | - | 0.7 ha | 667 | 16% | |||
2.2. Data Collection
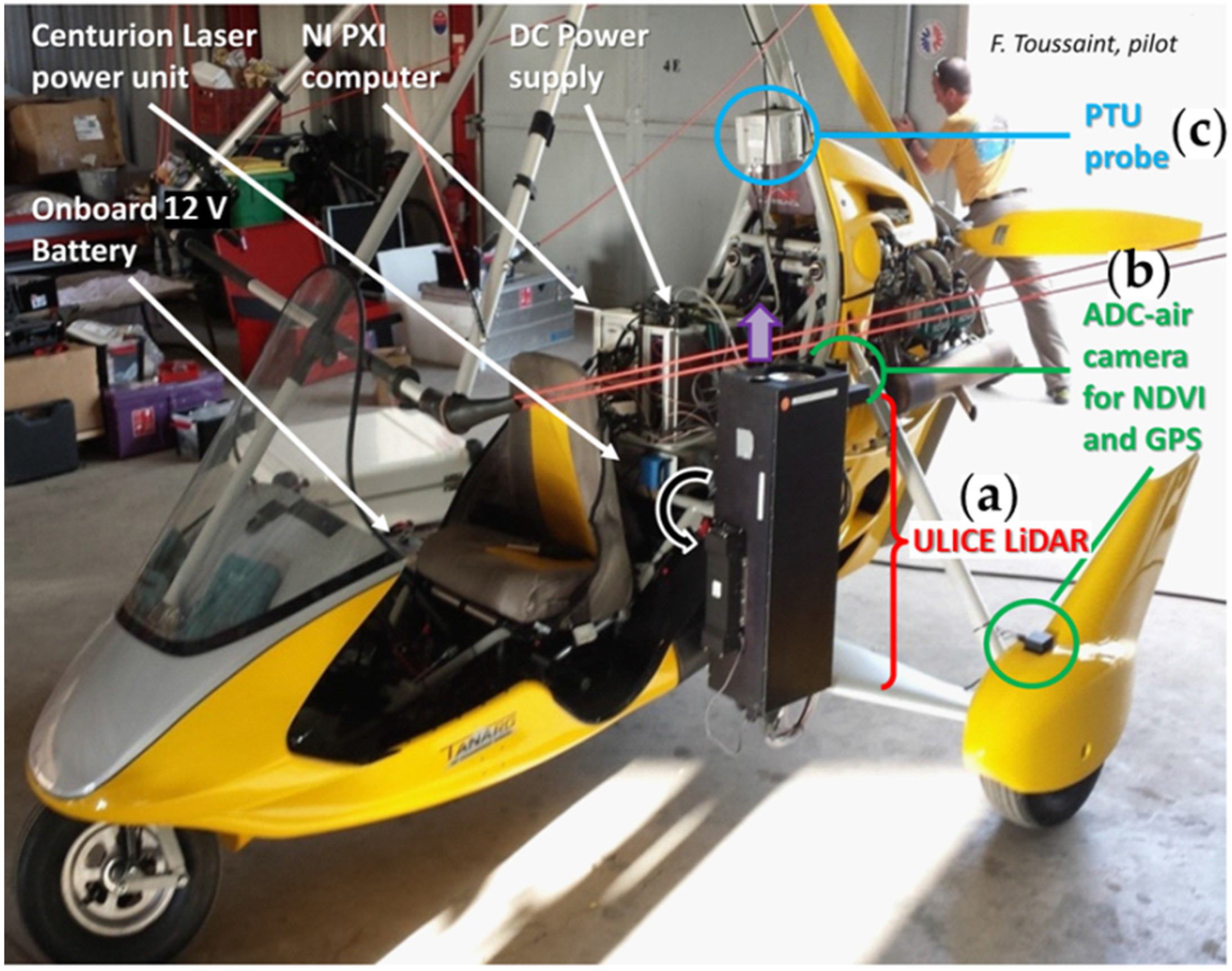
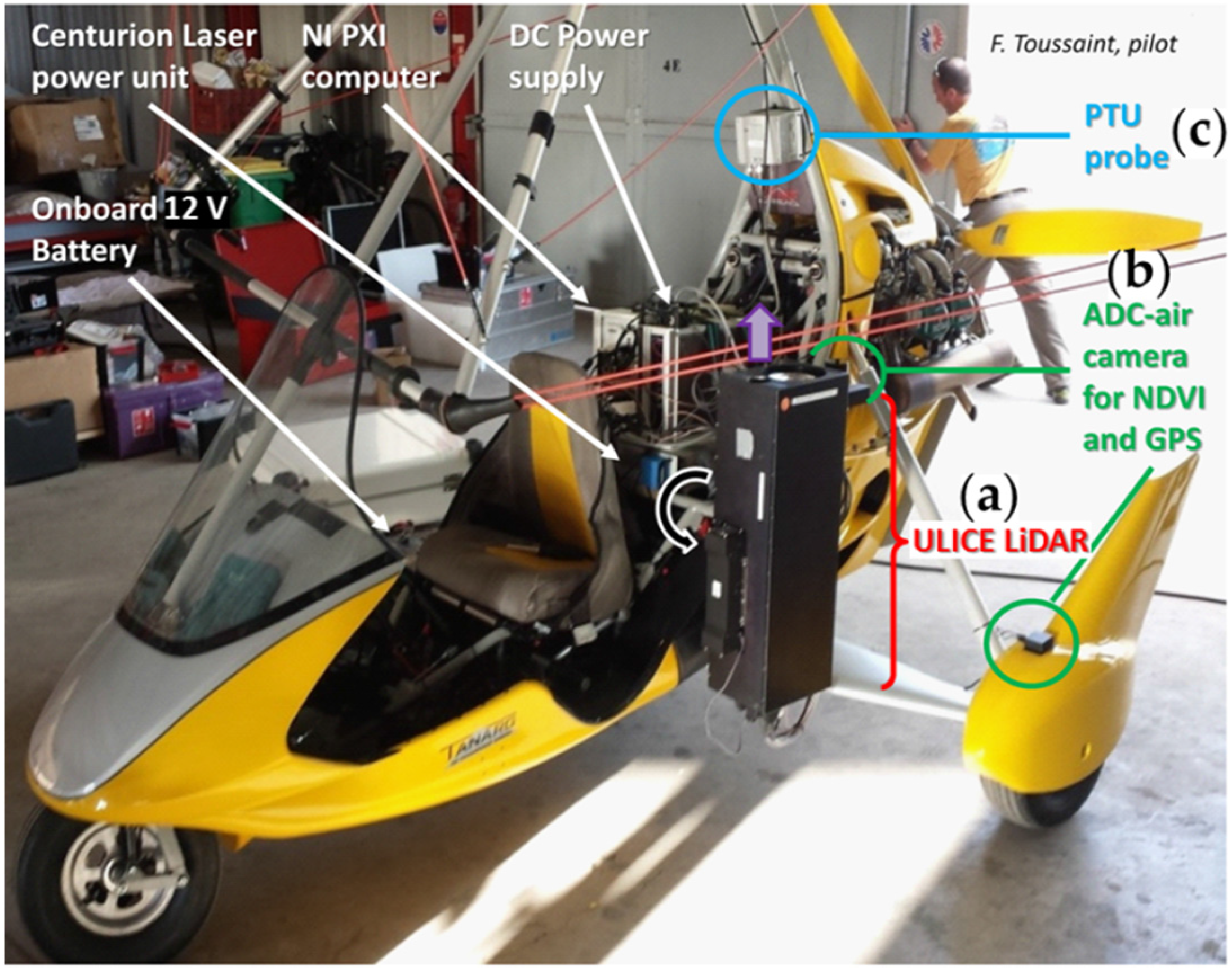
2.2.1. Airborne LiDAR and Instrumentation
| ULICE | Characteristics |
|---|---|
| Emitter (laser) | Quantel Centurion, diode-pumped, air-cooled, 6 mJ, 8 ns, 100 Hz, 354.7 nm |
| Output beam | Eyesafe ~40 × 30-mm beam, tunable 0 to 40 mrad divergence with Altechna MoTex Expander (at 1/e²) |
| Receiver | 2 channels with different optical densities (OD) |
| Telescope | Refractive, 150-mm diameter, 280-mm effective focal length |
| Filtering | No spatial filtering, wideband Thorlabs 355 nm ± 5 nm interference filters for large angular acceptancy (36 mrad) |
| Field of view | 33 mrad for Channel #0, 26 mrad for Channel #1 |
| Detection | Hamamatsu H10721 photo-multiplier tubes. Channel #0: 3.0 OD; Channel #1: 4.0 OD |
| Data acquisition | 12 bits, 200-MHz sampling, 2-channel NI-5124 digitizer, 33-Hz actual profile frequency |
| Sounding area | Tunable up to ~30 mrad on Channel #0, <22 mrad on Channel #1 (at 1/e²) |
2.2.2. Field Data Collection
2.2.3. Other Data Collections
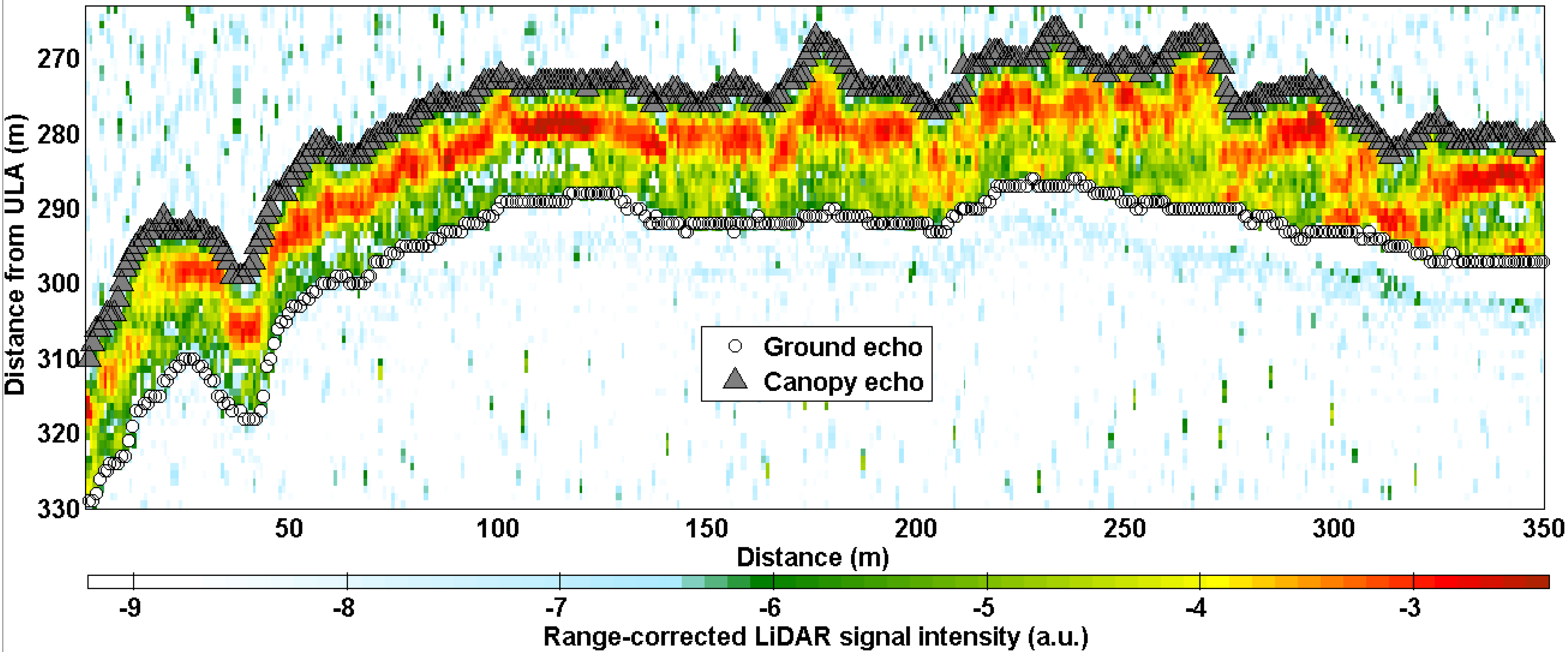
2.3. LiDAR Data Processing
2.3.1. Forest Structural Parameter: Canopy Height
2.3.2. Forest Optical Parameters
2.3.3. Forest Ecological Parameters
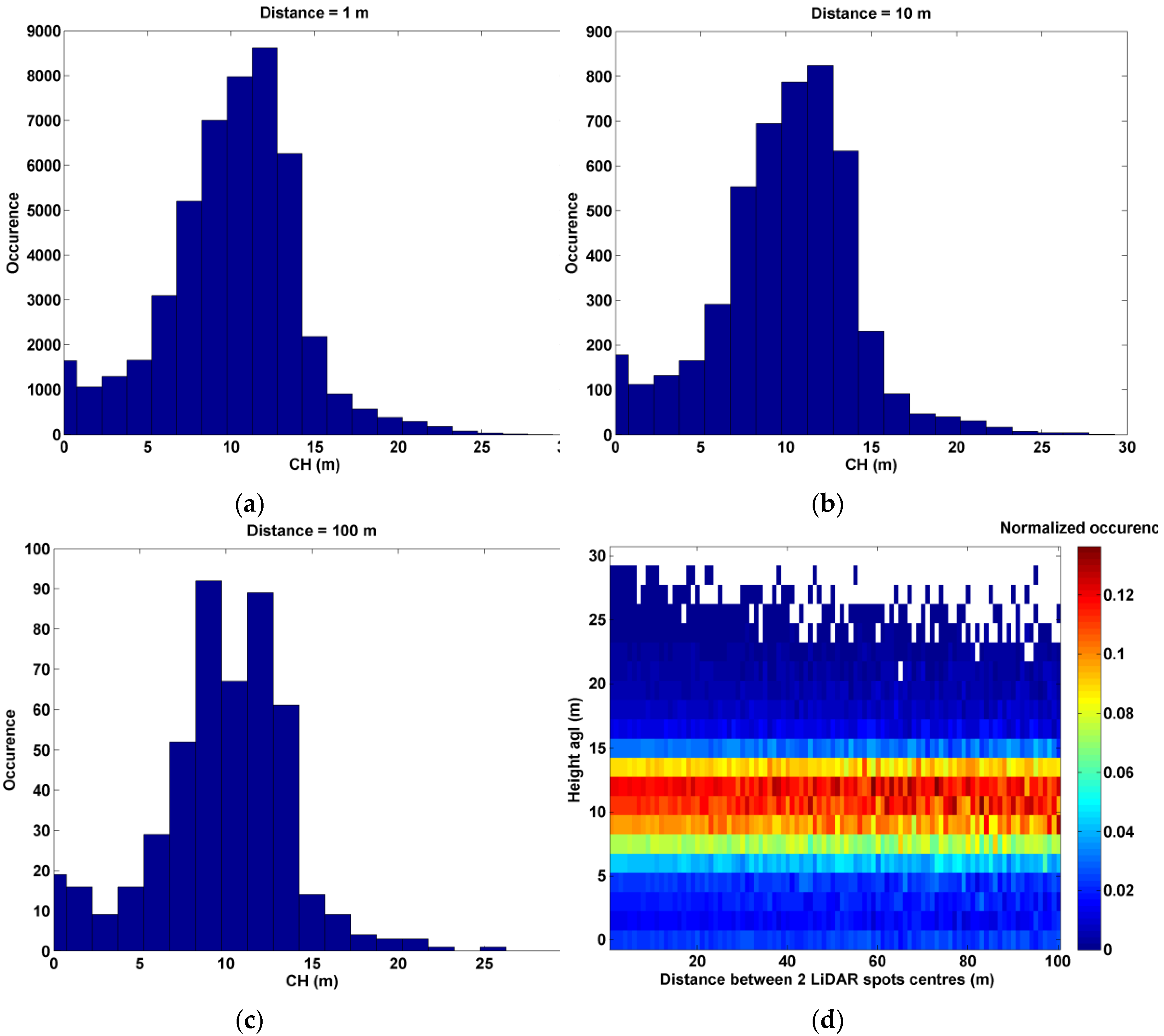
2.4. Sampling Strategy
3. Results and Discussion on Retrieved Tropical Forest Parameters
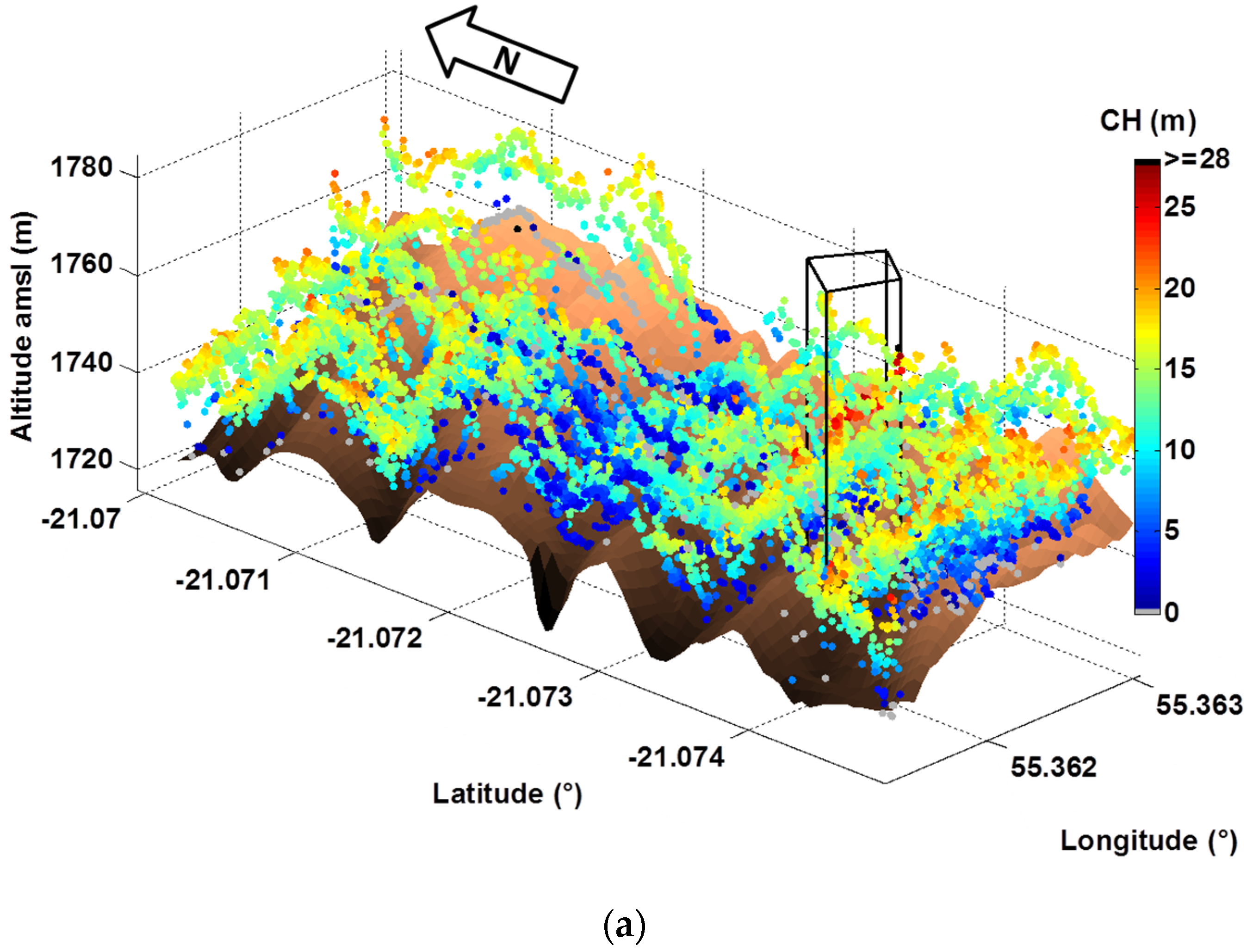
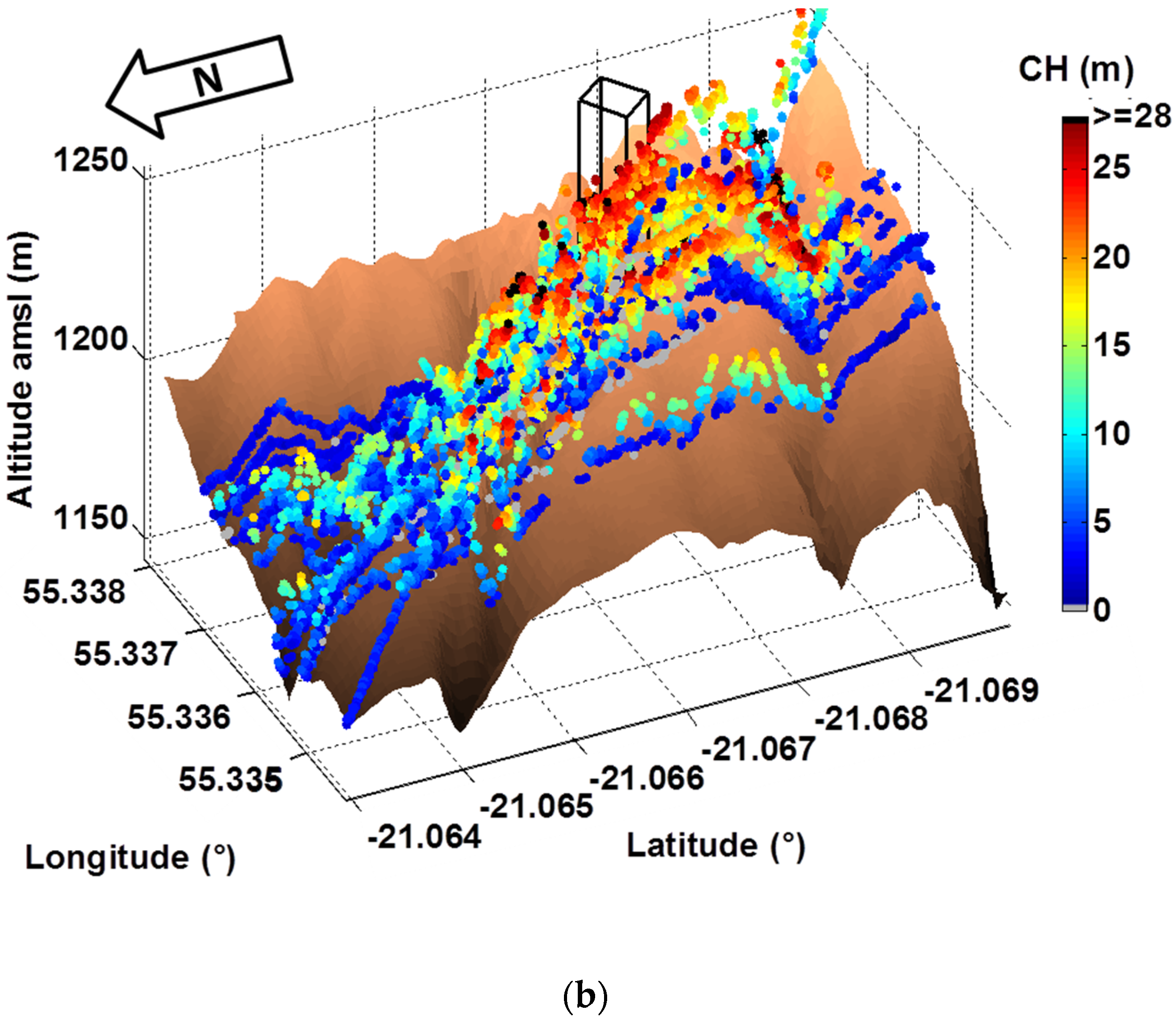
3.1. Canopy Height
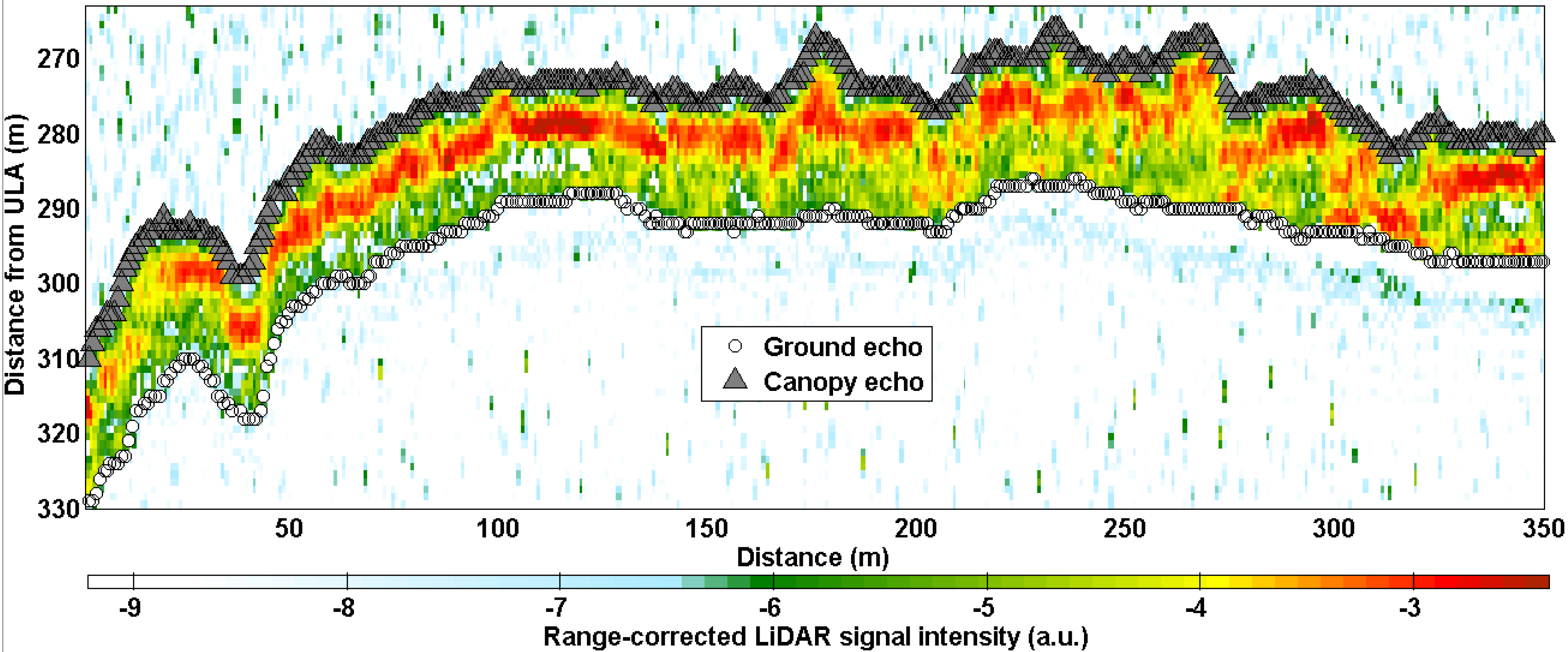
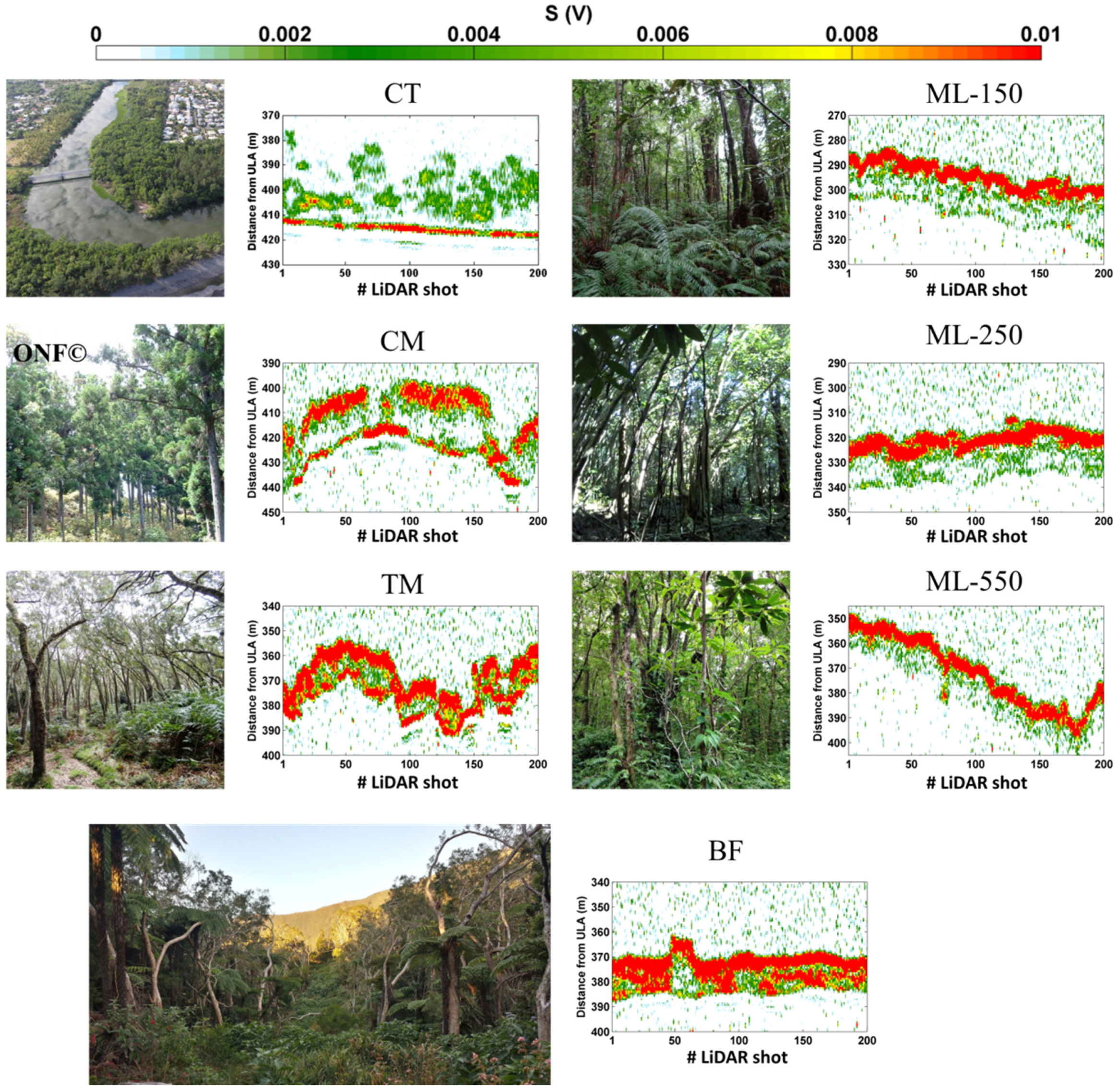
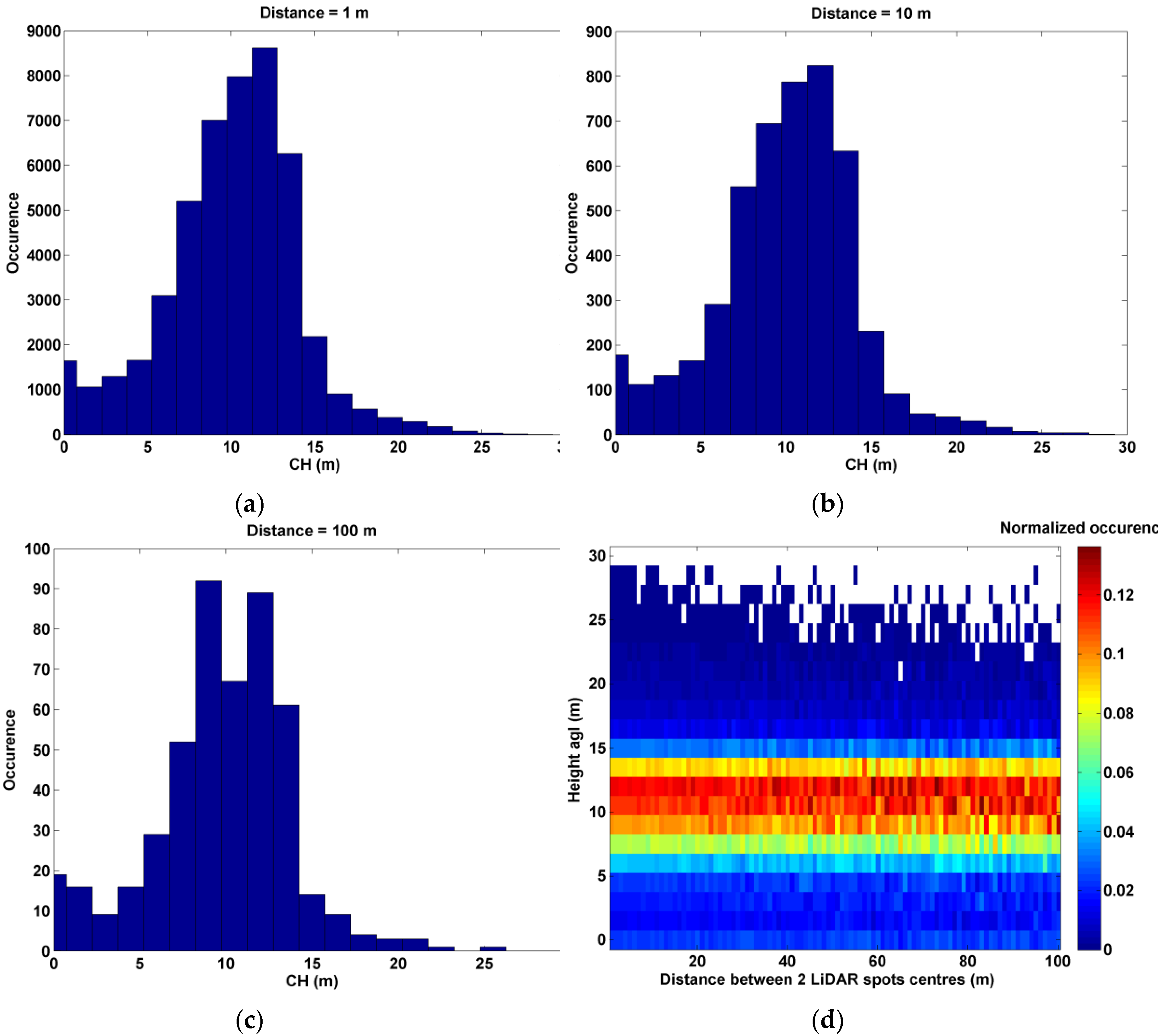
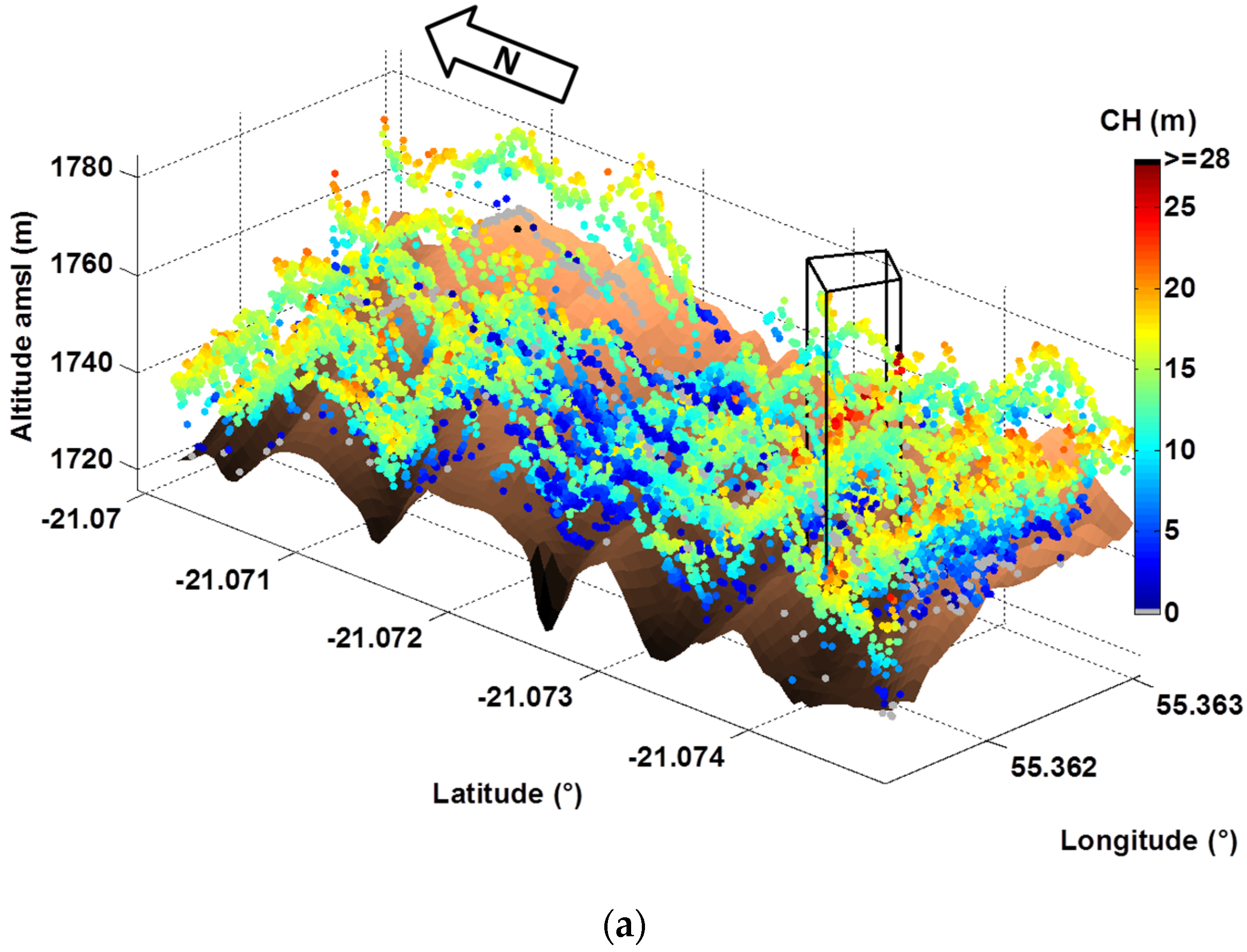
3.1.1. LiDAR-Derived Canopy Height
| CT | TM | CM | BF | ML-150 | ML-250 | ML-550 | |
|---|---|---|---|---|---|---|---|
| Number of samples | 1621 | 12,660 | 5790 | 42,714 | 9639 | 1518 | 658 |
| CH (m) | |||||||
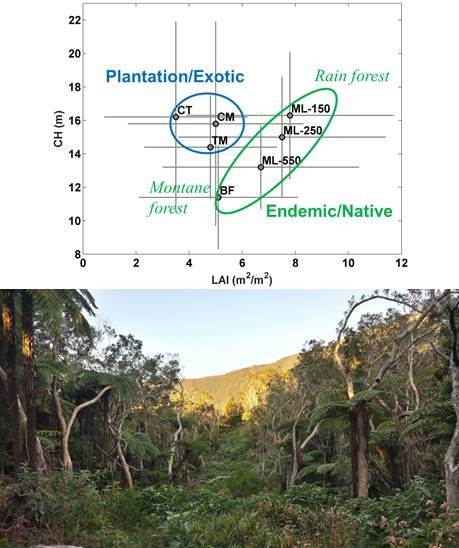
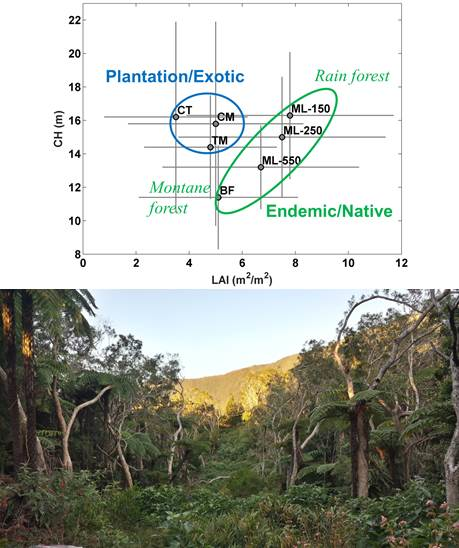
| Mean | 16.2 | 14.4 | 15.8 | 11.4 | 16.3 | 15.0 | 13.2 |
| Median | 16.5 | 15.0 | 16.5 | 11.3 | 17.3 | 15.0 | 12.8 |
| SD (rugosity) | 5.7 | 3.1 | 6.1 | 3.1 | 3.8 | 3.6 | 2.5 |
| Max | 29.3 | 28.5 | 29.3 | 28.5 | 30.8 | 24.0 | 21.0 |
| LAI (m2/m2) | |||||||
| Mean | 3.5 | 4.8 | 5.0 | 5.1 | 7.8 | 7.5 | 6.7 |
| Median | 2.8 | 4.2 | 4.1 | 4.5 | 6.7 | 6.7 | 5.9 |
| SD | 2.7 | 2.5 | 3.3 | 3.0 | 3.9 | 3.9 | 3.7 |
| LAI from MODIS (m2/m2) | |||||||
| Number of pixels (number of valid observations per pixel) | 2 (10) | 4 (14) | 3 (14) | ||||
| Mean | - | 5.4 | 5.1 | 5.9 | |||
| SD | - | 0.5 | 0.4 | 0.3 | |||

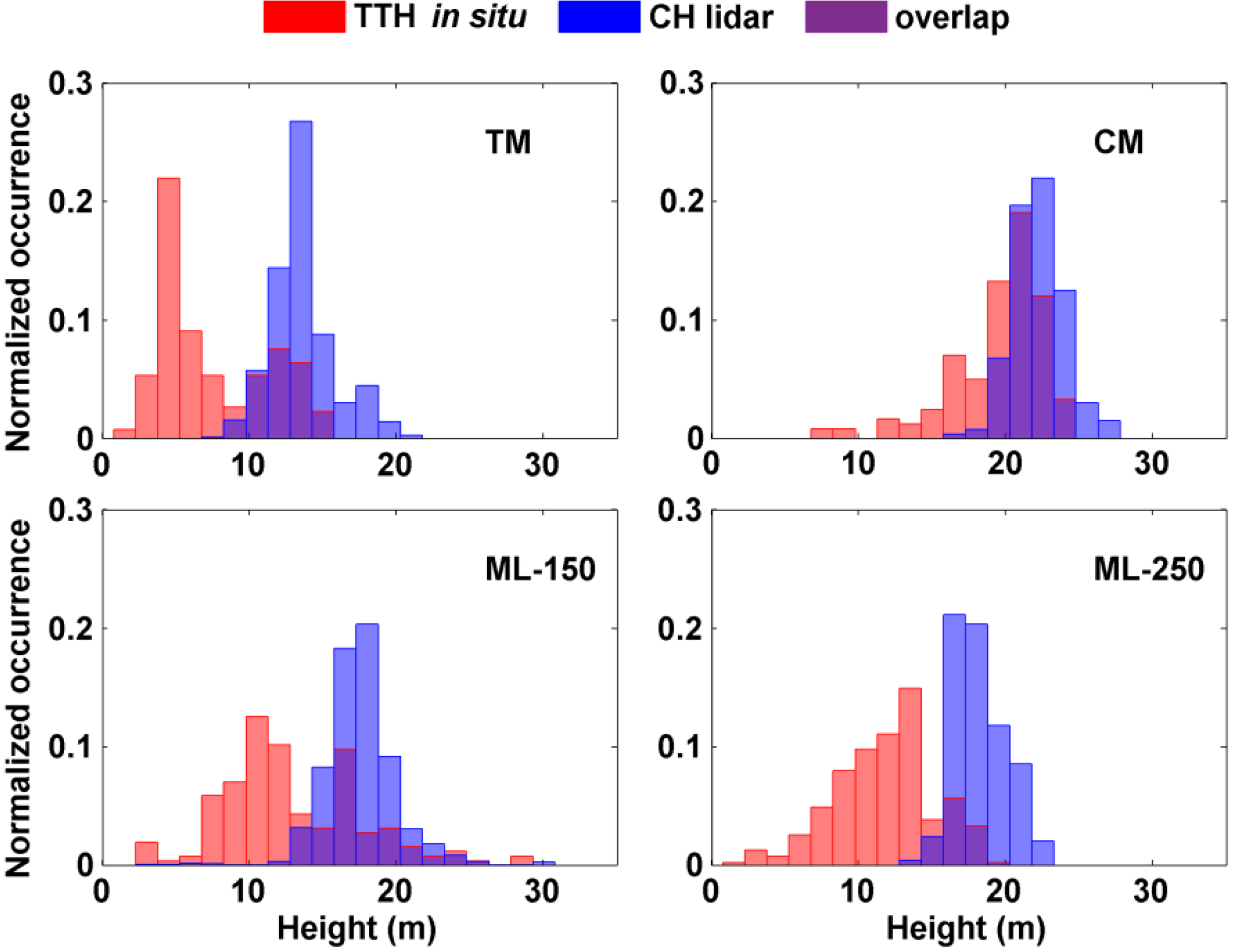
3.1.2. Comparison with in Situ Measurements
| Sub-Plot | ||||
|---|---|---|---|---|
| TM | CM | ML-150 | ML-250 | |
| Location | 21°4′25″S, 55°21′44″E | 21°4′3″S, 55°20′13″E | 21°21′29″S, 55°44′43″E | 21°21′2″S, 55°44′39″E |
| Number of LiDAR profiles | 635 | 245 | 2371 | 164 |
| Number of in situ values | 176 | 161 | 170 | 259 |
| LiDAR CH (m) | ||||
| Mean | 14.0 | 22.6 | 17.9 | 18.5 |
| Median | 13.5 | 22.5 | 18.0 | 18.0 |
| SD | 2.2 | 1.8 | 2.5 | 1.8 |
| max | 21.8 | 27.8 | 30.8 | 23.3 |
| In Situ TTH (m) | ||||
| Mean | 7.5 | 19.5 | 12.9 | 11.8 |
| Median | 5.8 | 20.4 | 11.8 | 12.1 |
| SD | 3.7 | 3.2 | 4.8 | 3.4 |
| max | 15 | 24.1 | 28.9 | 19.2 |
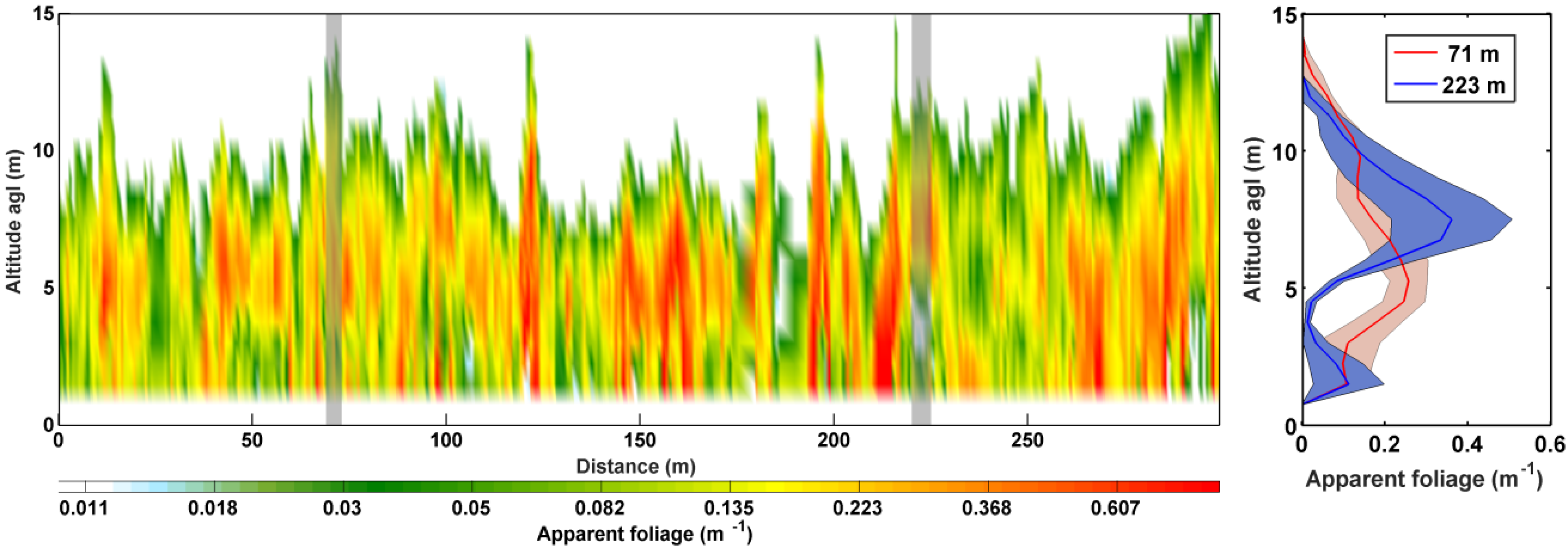
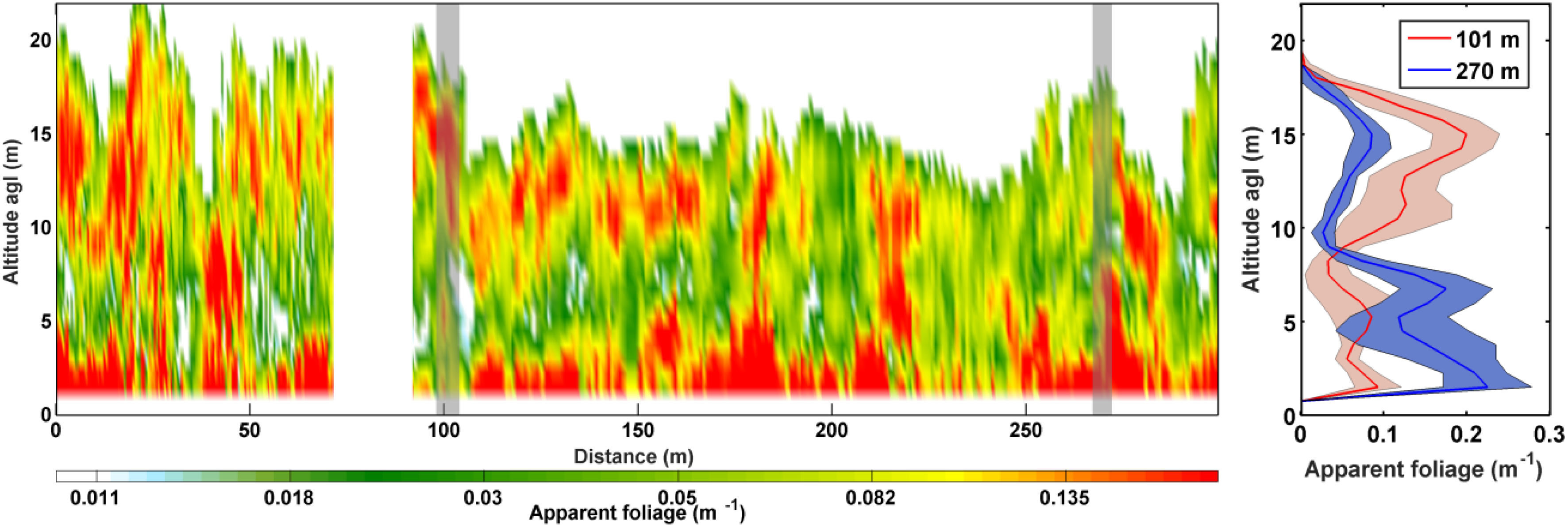
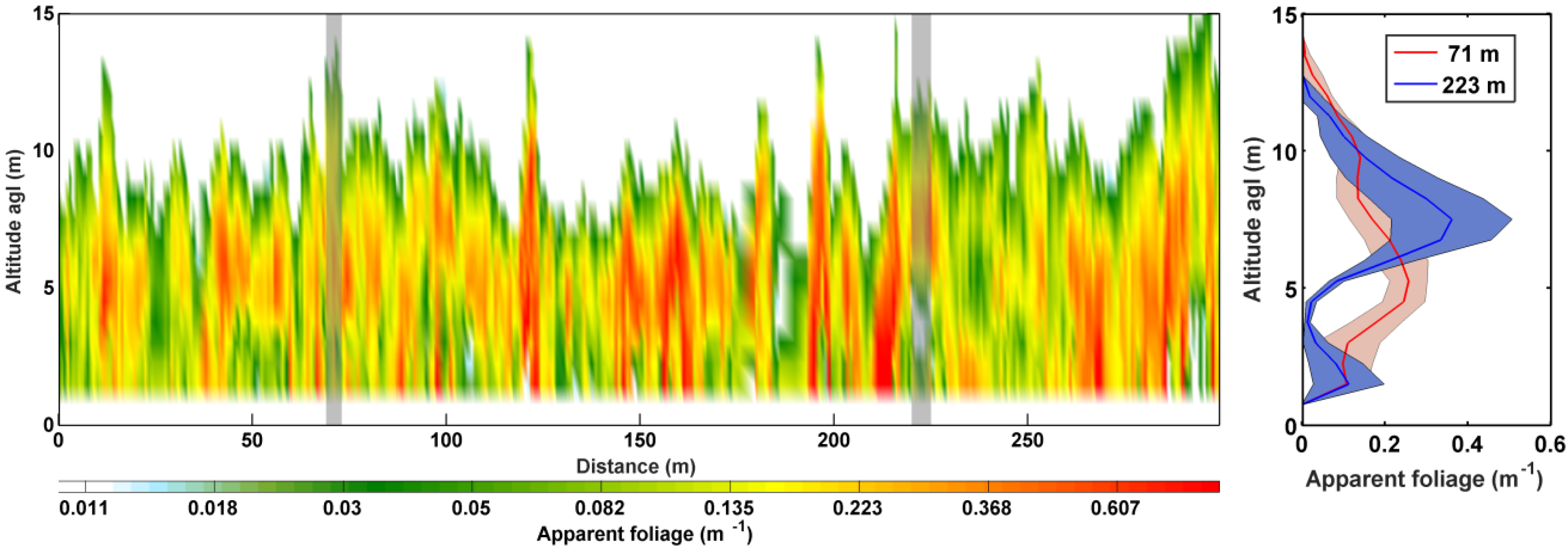
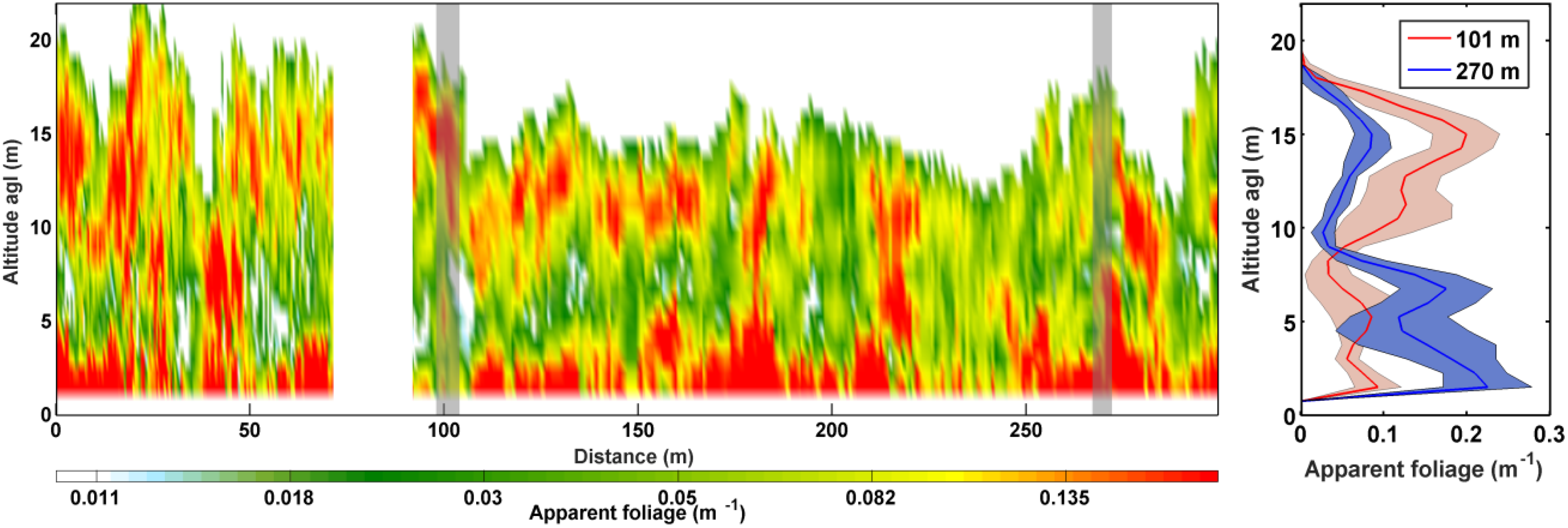
3.2. Understanding Results with Apparent Foliage Profiles
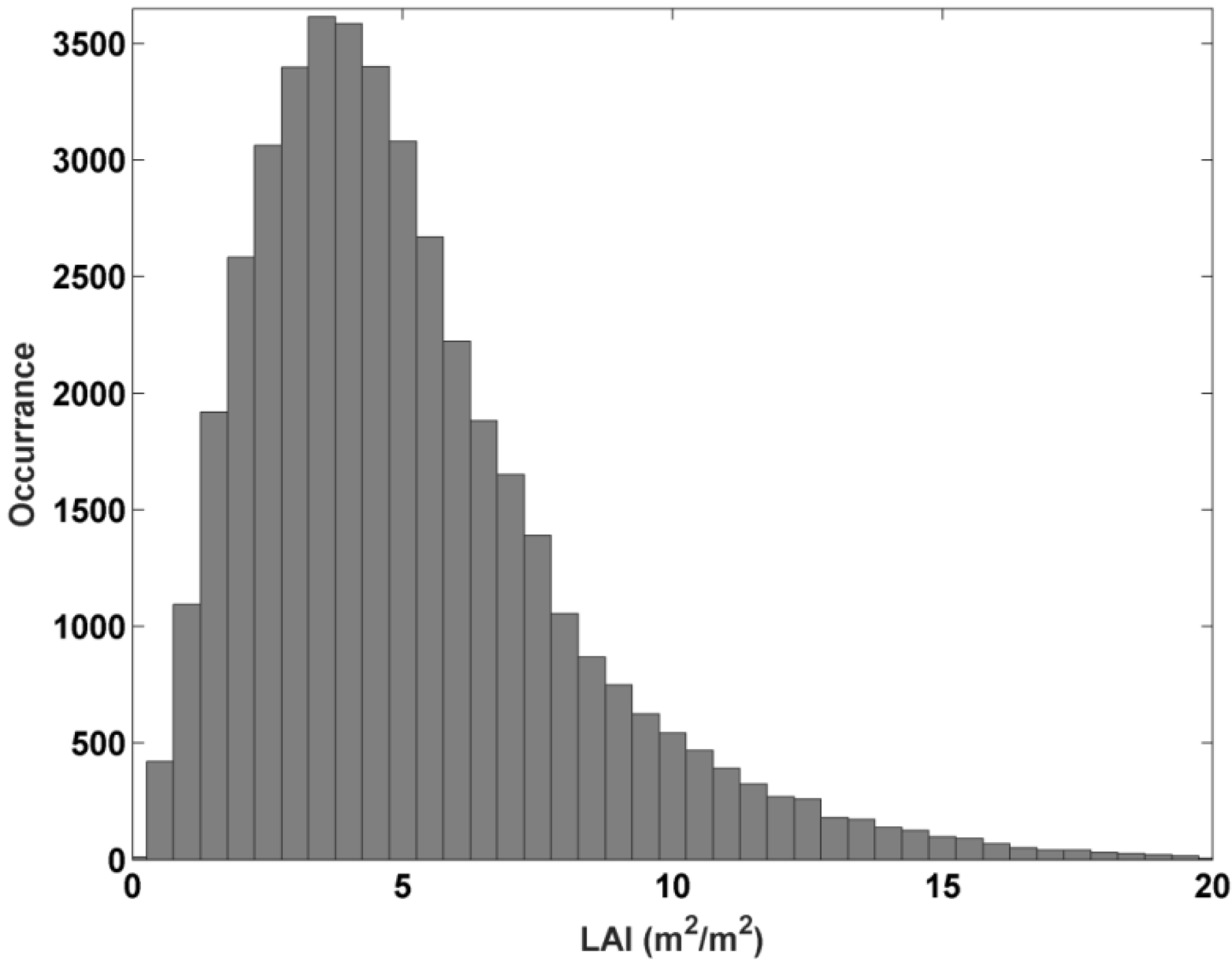
3.3. Leaf Area Index
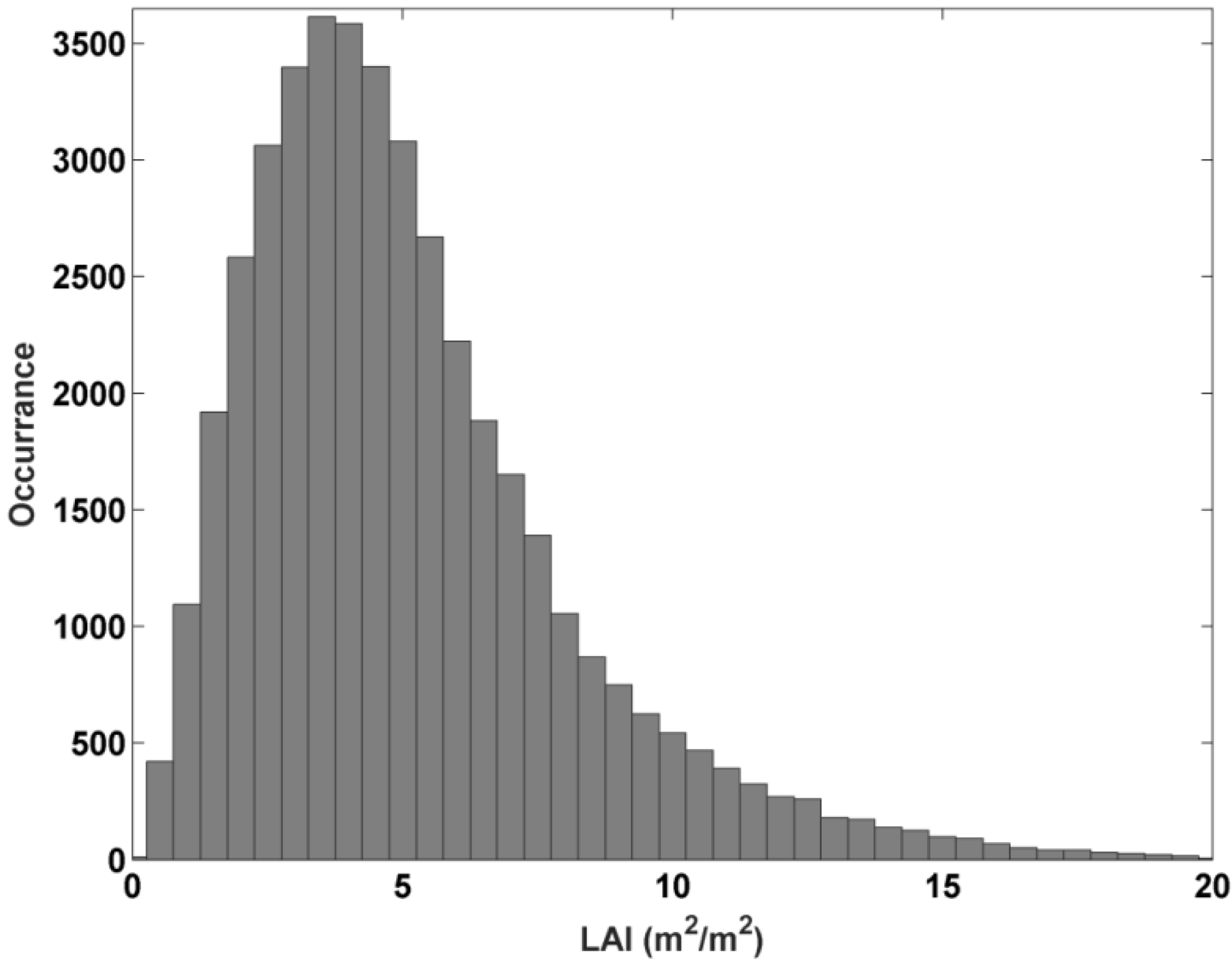
3.3.1. LiDAR-Derived LAI
3.3.2. Inter-Comparison and Discussion
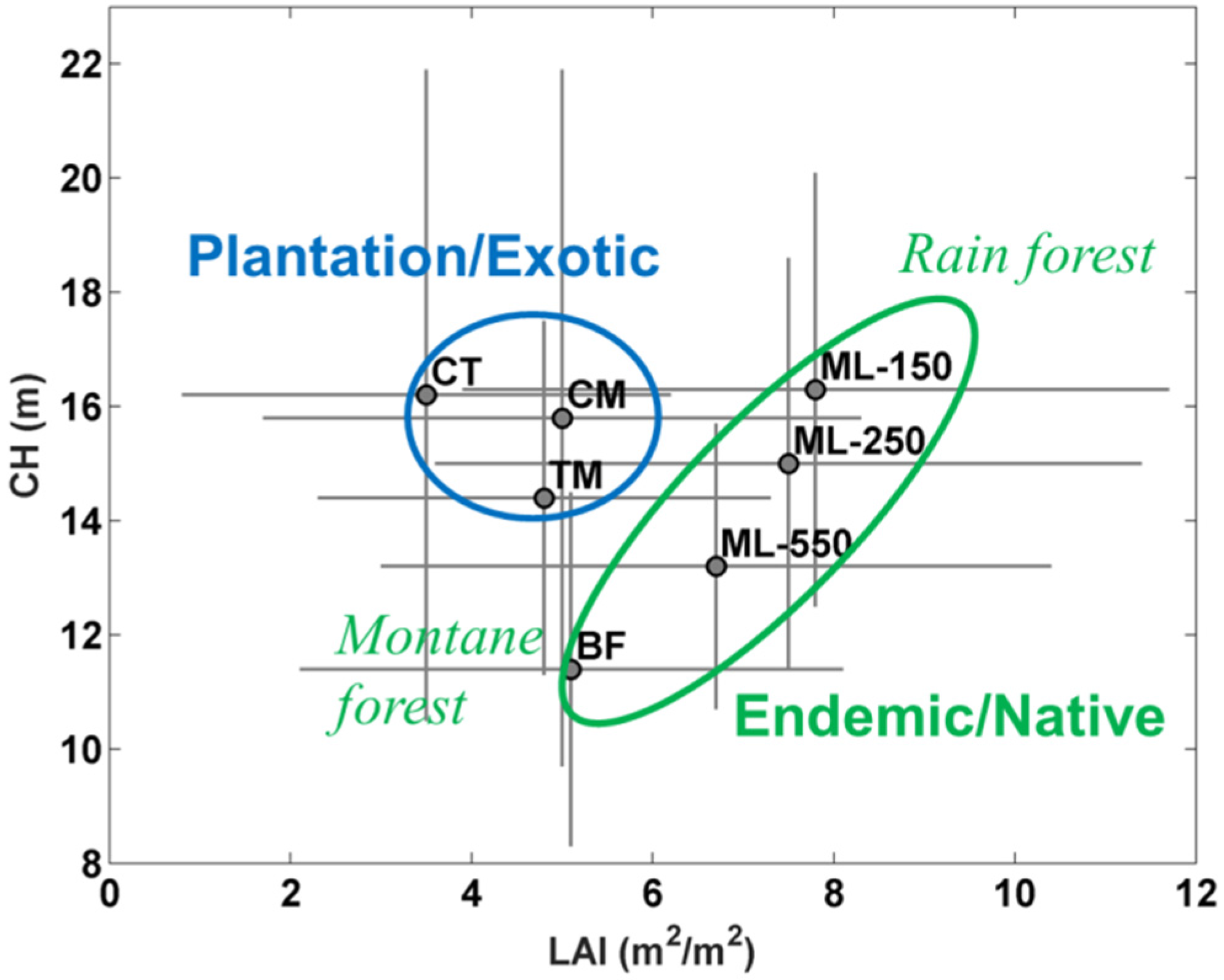
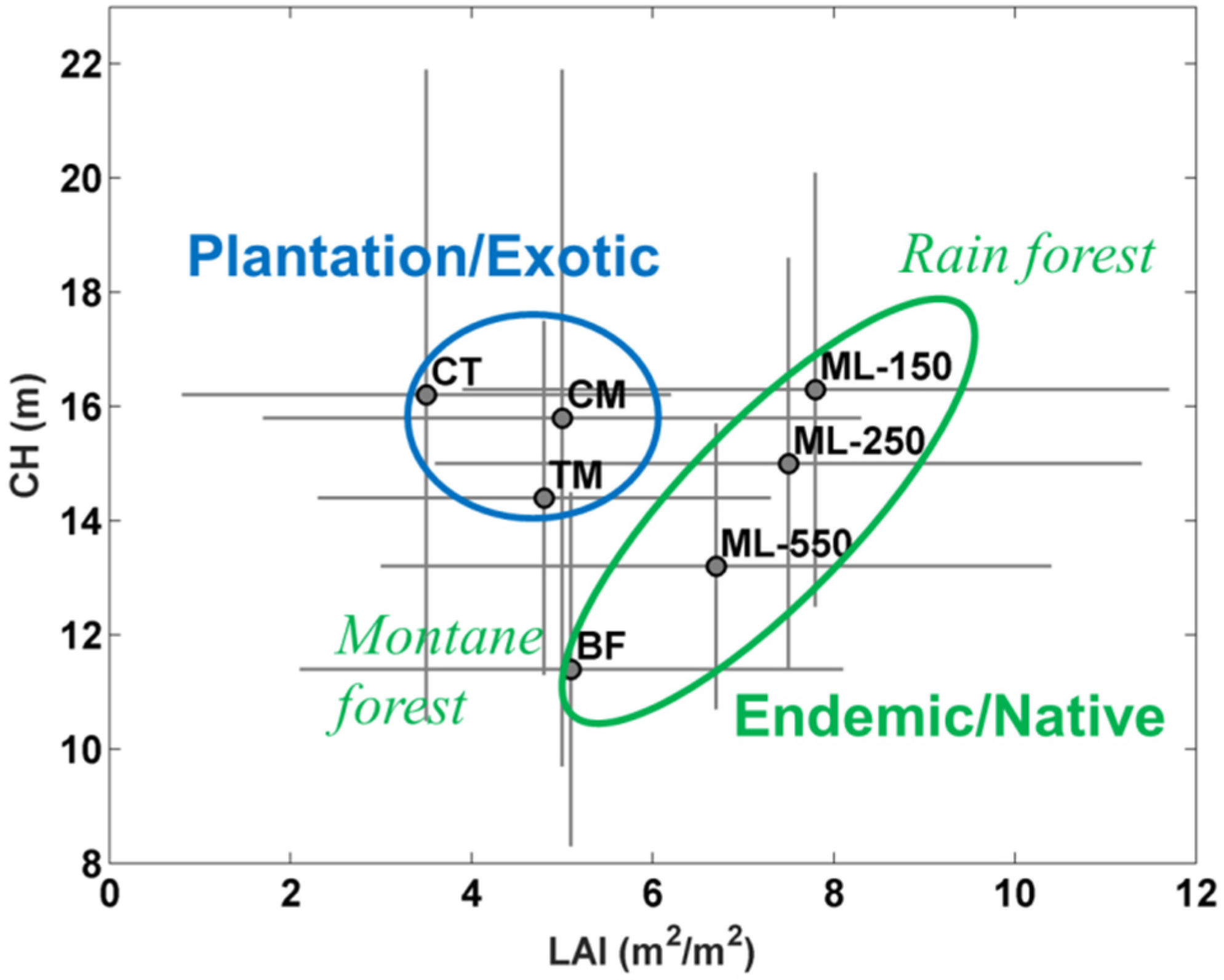
3.4. Classification
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Franklin, S.E.; Hall, R.J.; Moskal, L.M.; Maudie, A.J.; Lavigne, M.B. Incorporating texture into classification of forest species composition from airborne multispectral images. Int. J. Remote Sens. 2000, 21, 61–79. [Google Scholar] [CrossRef]
- Popescu, S.C.; Wynne, R.H.; Scrivani, J.A. Fusion of small-footprint LiDAR and multispectral data to estimate plot- level volume and biomass in deciduous and pine forests in Virginia, USA. Soc. Am. For. 2001, 50, 551–565. [Google Scholar]
- Etteieb, S.; Louhaichi, M.; Kalaitzidis, C.; Gitas, I.Z. Mediterranean forest mapping using hyper-spectral satellite imagery. Arab. J. Geosci. 2012, 6, 5017–5032. [Google Scholar] [CrossRef]
- Hilton, F.; Armante, R.; August, T.; Barnet, C.; Bouchard, A.; Camy-Peyret, C.; Capelle, V.; Clarisse, L.; Clerbaux, C.; Coheur, P.-F.; et al. Hyperspectral earth observation from IASI: Five years of accomplishments. Bull. Am. Meteorol. Soc. 2012, 93, 347–370. [Google Scholar] [CrossRef]
- Huesca, M.; Merino-de-Miguel, S.; Gonzalez-Alonso, F.; Martinez, S.; Miguel Cuevas, J.; Calle, A. Using AHS hyper-spectral images to study forest vegetation recovery after a fire. Int. J. Remote Sens. 2013, 34, 4025–4048. [Google Scholar] [CrossRef]
- Hyde, P.; Dubayah, R.; Walker, W.; Blair, J.B.; Hofton, M.; Hunsaker, C. Mapping forest structure for wildlife habitat analysis using multi-sensor (LiDAR, SAR/InSAR, ETM+, Quickbird) synergy. Remote Sens. Environ. 2006, 102, 63–73. [Google Scholar] [CrossRef]
- Beets, P.N.; Reutebuch, S.; Kimberley, M.O.; Oliver, G.R.; Pearce, S.H.; McGaughey, R.J. Leaf Area Index, biomass carbon and growth rate of radiata pine genetic types and relationships with LiDAR. Forests 2011, 2, 637–659. [Google Scholar] [CrossRef]
- Parker, G.G.; Harding, D.J.; Berger, M.L. A portable LiDAR system for rapid determination of forest canopy structure. J. Appl. Ecol. 2004, 41, 755–767. [Google Scholar] [CrossRef]
- Jupp, D.L.B.; Culvenor, D.S.; Lovell, J.L.; Newnham, G.J.; Strahler, A.H.; Woodcock, C.E. Estimating forest LAI profiles and structural parameters using a ground-based laser called “Echidna”. Tree Phys. 2009, 29, 171–181. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Strahler, A.H.; Schaaf, C.B.; Jupp, D.L.B.; Yao, T.; Zhao, F.; Wang, Z.; Culvenor, D.S.; Newnham, G.J.; Lovell, J.L.; et al. Three-dimensional forest reconstruction and structural parameter retrievals using a terrestrial full-waveform LiDAR instrument (Echidna®). Remote Sens. Environ. 2013, 135, 36–51. [Google Scholar] [CrossRef]
- Greaves, H.E.; Vierling, L.A.; Eitel, J.U.H.; Boelman, N.T.; Magney, T.S.; Prager, C.M.; Griffin, K.L. Estimating aboveground biomass and leaf area of low-stature Arctic shrubs with terrestrial LiDAR. Remote Sens. Environ. 2015, 164, 26–35. [Google Scholar] [CrossRef]
- Dassot, M.; Constant, T.; Fournier, M. The use of terrestrial LiDAR technology in forest science: Application fields, benefits and challenges. Ann. For. Sci. 2011, 68, 959–974. [Google Scholar] [CrossRef]
- Asner, G.P.; Mascaro, J.; Muller-Landau, H.C.; Vieilledent, G.; Vaudry, R.; Rasamoelina, M.; Hall, J.S.; Breugel, M. A universal airborne LiDAR approach for tropical forest carbon mapping. Oecologia 2012, 168, 1147–1160. [Google Scholar] [CrossRef] [PubMed]
- Asner, G.P.; Powell, G.V.N.; Mascaro, J.; Knapp, D.E.; Clark, J.K.; Jacobson, J.; Kennedy-Bowdoin, T.; Balaji, A.; Paez-Acosta, G.; Victoria, E.; et al. High-resolution forest carbon stocks and emissions in the Amazon. Proc. Natl. Acad. Sci. USA 2010, 107, 16738–16742. [Google Scholar] [CrossRef] [PubMed]
- Leitold, V.; Keller, M.; Morton, D.C.; Cook, B.D.; Shimabukuro, Y.E. Airborne LiDAR-based estimates of tropical forest structure in complex terrain: Opportunities and trade-offs for REDD+. Carbon Balance Manag. 2015, 10. [Google Scholar] [CrossRef] [PubMed]
- Drake, J.B.; Dubayah, R.O.; Clark, D.B.; Knox, R.G.; Blair, J.B.; Hofton, M.A.; Chazdon, R.L.; Weishampel, J.F.; Prince, S. Estimation of tropical forest structural characteristics using large-footprint LiDAR. Remote Sens. Environ. 2002, 79, 305–319. [Google Scholar] [CrossRef]
- Dubayah, R.O.; Sheldon, S.L.; Clark, D.B.; Hofton, M.A.; Blair, J.B.; Hurtt, G.C.; Chazdon, R.L. Estimation of tropical forest height and biomass dynamics using LiDAR remote sensing at La Selva, Costa Rica. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Cuesta, J.; Chazette, P.; Allouis, T.; Flamant, P.H.; Durrieu, S.; Sanak, J.; Genau, P.; Guyon, D.; Loustau, D.; Flamant, C. Observing the forest canopy with a new ultra-violet compact airborne LiDAR. Sensors 2010, 10, 7386–7403. [Google Scholar] [CrossRef] [PubMed]
- Shang, X.; Chazette, P. Interest of a full-waveform flown UV LiDAR to derive forest vertical structures and aboveground carbon. Forests 2014, 5, 1454–1480. [Google Scholar] [CrossRef]
- Blair, J.B.; Rabine, D.L.; Hofton, M.A. The laser vegetation imaging sensor: A medium-altitude, digitisation-only, airborne laser altimeter for mapping vegetation and topography. ISPRS J. Photogramm. Remote Sens. 1999, 54, 115–122. [Google Scholar] [CrossRef]
- Tang, H.; Dubayah, R.; Swatantran, A.; Hofton, M.; Sheldon, S.; Clark, D.B.; Blair, B. Retrieval of vertical LAI profiles over tropical rain forests using waveform LiDAR at La Selva, Costa Rica. Remote Sens. Environ. 2012, 124, 242–250. [Google Scholar] [CrossRef]
- Tang, H.; Brolly, M.; Zhao, F.; Strahler, A.H.; Schaaf, C.L.; Ganguly, S.; Zhang, G.; Dubayah, R. Deriving and validating Leaf Area Index (LAI) at multiple spatial scales through LiDAR remote sensing: A case study in Sierra National Forest, CA. Remote Sens. Environ. 2014, 143, 131–141. [Google Scholar] [CrossRef]
- Strasberg, D.; Rouget, M.; Richardson, D.M.; Baret, S.; Dupont, J.; Cowling, R.M. An assessment of habitat diversity and transformation on La Réunion Island (Mascarene Islands, Indian Ocean) as a Basis for Identifying Broad-scale Conservation Priorities. Biodivers. Conserv. 2005, 14, 3015–3032. [Google Scholar] [CrossRef]
- Cadet, T.; Figier, J. Réserve Naturelle de Mare-Longue: Etude Floristique et Ecologique; Université de la Réunion: Saint-Denis, France, 1989. [Google Scholar]
- Strasberg, D. Diversity, size composition and spatial aggregation among trees on a 1-ha rain forest plot at La Réunion. Biodivers. Conserv. 1996, 5, 825–840. [Google Scholar] [CrossRef]
- Shang, X.; Chazette, P. End-to-end simulation for a forest-dedicated full-waveform LiDAR onboard a satellite initialized from airborne ultraviolet LiDAR experiments. Remote Sens. 2015, 7, 5222–5255. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Harding, D.; Cohen, W.B.; Parker, G.; Shugart, H.H. Surface LiDAR remote sensing of basal area and biomass in deciduous forests of eastern Maryland, USA. Remote Sens. Environ. 1999, 67, 83–98. [Google Scholar] [CrossRef]
- Drake, J.B.; Dubayah, R.O.; Knox, R.G.; Clark, D.B.; Blair, J.B. Sensitivity of large-footprint LiDAR to canopy structure and biomass in a neotropical rainforest. Remote Sens. Environ. 2002, 81, 378–392. [Google Scholar] [CrossRef]
- Means, J.E.; Acker, S.A.; Harding, D.J.; Blair, J.B.; Lefsky, M.A.; Cohen, W.B.; Harmon, M.E.; McKee, W.A. Use of large-footprint scanning airborne LiDAR to estimate forest stand characteristics in the western cascades of Oregon. Remote Sens. Environ. 1999, 67, 298–308. [Google Scholar] [CrossRef]
- Riaño, D.; Valladares, F.; Condés, S.; Chuvieco, E. Estimation of Leaf Area Index and covered ground from airborne laser scanner (LiDAR) in two contrasting forests. Agric. For. Meteorol. 2004, 124, 269–275. [Google Scholar] [CrossRef]
- Yang, W.; Tan, B.; Huang, D.; Rautiainen, M.; Shabanov, N.V.; Wang, Y.; Privette, J.L.; Huemmrich, K.F.; Fensholt, R.; Sandholt, I.; et al. MODIS Leaf Area Index products: From validation to algorithm improvement. IEEE Trans. Geosci. Remote Sens. 2006, 44, 1885–1898. [Google Scholar] [CrossRef]
- Chazette, P.; Pelon, J.; Mégie, G. Determination by spaceborne backscatter LiDAR of the structural parameters of atmospheric scattering layers. Appl. Opt. 2001, 40, 3428–3440. [Google Scholar] [CrossRef] [PubMed]
- Chazette, P.; Dabas, A.; Sanak, J.; Lardier, M.; Royer, P. French airborne LiDAR measurements for Eyjafjallajökull ash plume survey. Atmos. Chem. Phys. 2012, 12, 7059–7072. [Google Scholar] [CrossRef]
- Chazette, P.; Bocquet, M.; Royer, P.; Winiarek, V.; Raut, J.-C.; Labazuy, P.; Gouhier, M.; Lardier, M.; Cariou, J.-P. Eyjafjallajökull ash concentrations derived from both LiDAR and modeling. J. Geophys. Res. Atmos. 2012, 117. [Google Scholar] [CrossRef]
- Measures, R.M. Laser Remote Sensing: Fundamentals and Applications; Wiley, J., Ed.; Krieger Publishing Company: Malabar, FL, USA, 1984. [Google Scholar]
- Chazette, P.; David, C.; Lefrère, J.; Godin, S.; Pelon, J.; Mégie, G. Comparative LiDAR study of the optical, geometrical, and dynamical properties of stratospheric post-volcanic aerosols, following the eruptions of El Chichon and Mount Pinatubo. J. Geophys. Res. 1995, 100. [Google Scholar] [CrossRef]
- Ni-Meister, W.; Jupp, D.L.B.; Dubayah, R. Modeling LiDAR waveforms in heterogeneous and discrete canopies. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1943–1958. [Google Scholar] [CrossRef]
- Ahmed, R.; Siqueira, P.; Hensley, S. A study of forest biomass estimates from LiDAR in the northern temperate forests of New England. Remote Sens. Environ. 2013, 130, 121–135. [Google Scholar] [CrossRef]
- Hofton, M.A.; Minster, J.B.; Blair, J.B. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1989–1996. [Google Scholar] [CrossRef]
- Lefsky, M.A.; Cohen, W.B.; Acker, S.A.; Parker, G.G.; Spies, T.A.; Harding, D. LiDAR remote sensing of the canopy structure and biophysical properties of Douglas-fir western hemlock forests. Remote Sens. Environ. 1999, 70, 339–361. [Google Scholar] [CrossRef]
- Farid, A.; Goodrich, D.C.; Bryant, R.; Sorooshian, S. Using airborne LiDAR to predict Leaf Area Index in cottonwood trees and refine riparian water-use estimates. J. Arid Environ. 2008, 72, 1–15. [Google Scholar] [CrossRef]
- Solberg, S.; Brunner, A.; Hanssen, K.H.; Lange, H.; Næsset, E.; Rautiainen, M.; Stenberg, P. Mapping LAI in a Norway spruce forest using airborne laser scanning. Remote Sens. Environ. 2009, 113, 2317–2327. [Google Scholar] [CrossRef]
- Platt, C.M.R. Remote sounding of high clouds. III: Monte Carlo calculations of multiple-scattered LiDAR returns. J. Atmos. Sci. 1981, 38, 156–167. [Google Scholar] [CrossRef]
- Berthier, S.; Chazette, P.; Couvert, P.; Pelon, J.; Dulac, F.; Thieuleux, F.; Moulin, C.; Pain, T. Desert dust aerosol columnar properties over ocean and continental Africa from LiDAR in-Space Technology Experiment (LITE) and Meteosat synergy. J. Geophys. Res. 2006, 111, D21202. [Google Scholar] [CrossRef]
- Chen, J.M.; Rich, P.M.; Gower, S.T.; Norman, J.M.; Plummer, S. Leaf Area Index of boreal forests: Theory, techniques, and measurements. J. Geophys. Res. 1997, 102, 29429–29443. [Google Scholar] [CrossRef]
- Leroy, M.; Deuzé, J.L.; Bréon, F.M.; Hautecoeur, O.; Herman, M.; Buriez, J.C.; Tanré, D.; Bouffiès, S.; Chazette, P.; Roujean, J.L. Retrieval of atmospheric properties and surface bidirectional reflectances over land from POLDER/ADEOS. J. Geophys. Res. 1997, 102, 17023–17037. [Google Scholar] [CrossRef]
- He, L.; Chen, J.M.; Pisek, J.; Schaaf, C.B.; Strahler, A.H. Global clumping index map derived from the MODIS BRDF product. Remote Sens. Environ. 2012, 119, 118–130. [Google Scholar] [CrossRef]
- Parker, G.G.; Lefsky, M.A.; Harding, D.J. Light transmittance in forest canopies determined using airborne laser altimetry and in-canopy quantum measurements. Remote Sens. Environ. 2001, 76, 298–309. [Google Scholar] [CrossRef]
- Gower, S.T.; Norman, J.M. Rapid estimation of Leaf Area Index in conifer and broad-leaf plantations. Ecology 1991, 72, 1896. [Google Scholar] [CrossRef]
- Ellsworth, D.S.; Reich, P.B. Canopy structure and vertical patterns of photosynthesis and related leaf traits in a deciduous forest. Oecologia 1993, 96, 169–178. [Google Scholar] [CrossRef]
- Knyazikhin, Y.; Glassy, J.; Privette, J.L.; Tian, Y.; Lotsch, A.; Zhang, Y.; Wang, Y.; Morisette, J.T.; Votava, P.; Myneni, R.B.; et al. MODIS Leaf Area Index (LAI) and fraction of photosynthetically active radiation absorbed by vegetation (FPAR) product (MOD15). Algorithm Theor. Basis Doc. 1999, 4, 1–14. [Google Scholar]
- Doughty, C.E.; Goulden, M.L. Seasonal patterns of tropical forest Leaf Area Index and CO2 exchange. J. Geophys. Res. 2008, 113, G00B06. [Google Scholar]
- Cristiano, P.; Madanes, N.; Campanello, P.; Francescantonio, D.; Rodríguez, S.; Zhang, Y.-J.; Carrasco, L.; Goldstein, G. High NDVI and potential canopy photosynthesis of South American subtropical forests despite seasonal changes in Leaf Area Index and air temperature. Forests 2014, 5, 287–308. [Google Scholar] [CrossRef]
- Asner, G.P.; Scurlock, J.M.O.; Hicke, J. Global synthesis of Leaf Area Index observations: Implications for ecological and remote sensing studies. Glob. Ecol. Biogeogr. 2003, 12, 191–205. [Google Scholar] [CrossRef]
- Tanner, E.V.J.; Vitousek, P.M.; Cuevas, E. Experimental investigation of nutrient limitation of forest growth on wet tropical mountains. Ecology 1998, 79, 10–22. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shang, X.; Chazette, P.; Totems, J.; Dieudonné, E.; Hamonou, E.; Duflot, V.; Strasberg, D.; Flores, O.; Fournel, J.; Tulet, P. Tropical Forests of Réunion Island Classified from Airborne Full-Waveform LiDAR Measurements. Remote Sens. 2016, 8, 43. https://doi.org/10.3390/rs8010043
Shang X, Chazette P, Totems J, Dieudonné E, Hamonou E, Duflot V, Strasberg D, Flores O, Fournel J, Tulet P. Tropical Forests of Réunion Island Classified from Airborne Full-Waveform LiDAR Measurements. Remote Sensing. 2016; 8(1):43. https://doi.org/10.3390/rs8010043
Chicago/Turabian StyleShang, Xiaoxia, Patrick Chazette, Julien Totems, Elsa Dieudonné, Eric Hamonou, Valentin Duflot, Dominique Strasberg, Olivier Flores, Jacques Fournel, and Pierre Tulet. 2016. "Tropical Forests of Réunion Island Classified from Airborne Full-Waveform LiDAR Measurements" Remote Sensing 8, no. 1: 43. https://doi.org/10.3390/rs8010043