
Automatic In Situ Calibration of a Spinning Beam LiDAR System in Static and Kinematic Modes


Abstract
:
1. Introduction
2. The Velodyne HDL-32E and Its Temporal Stability
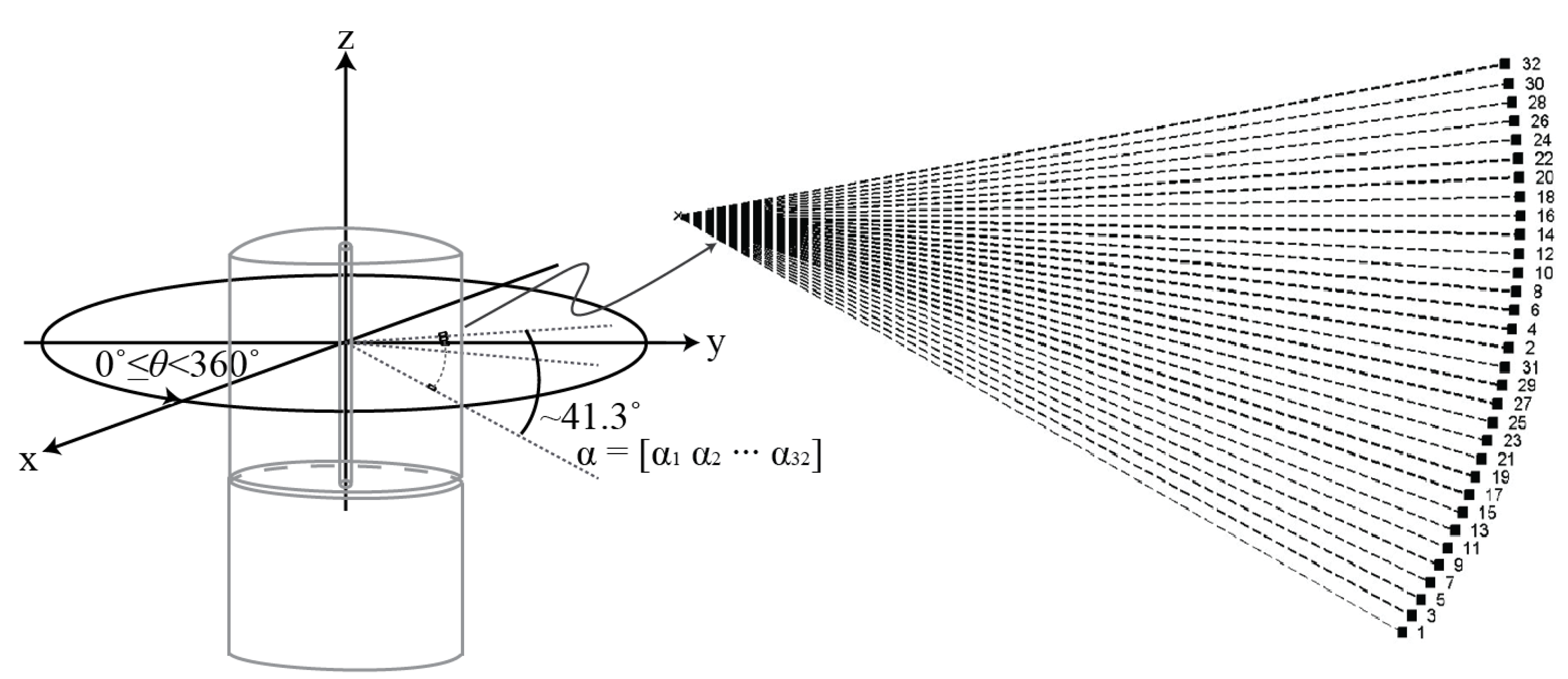
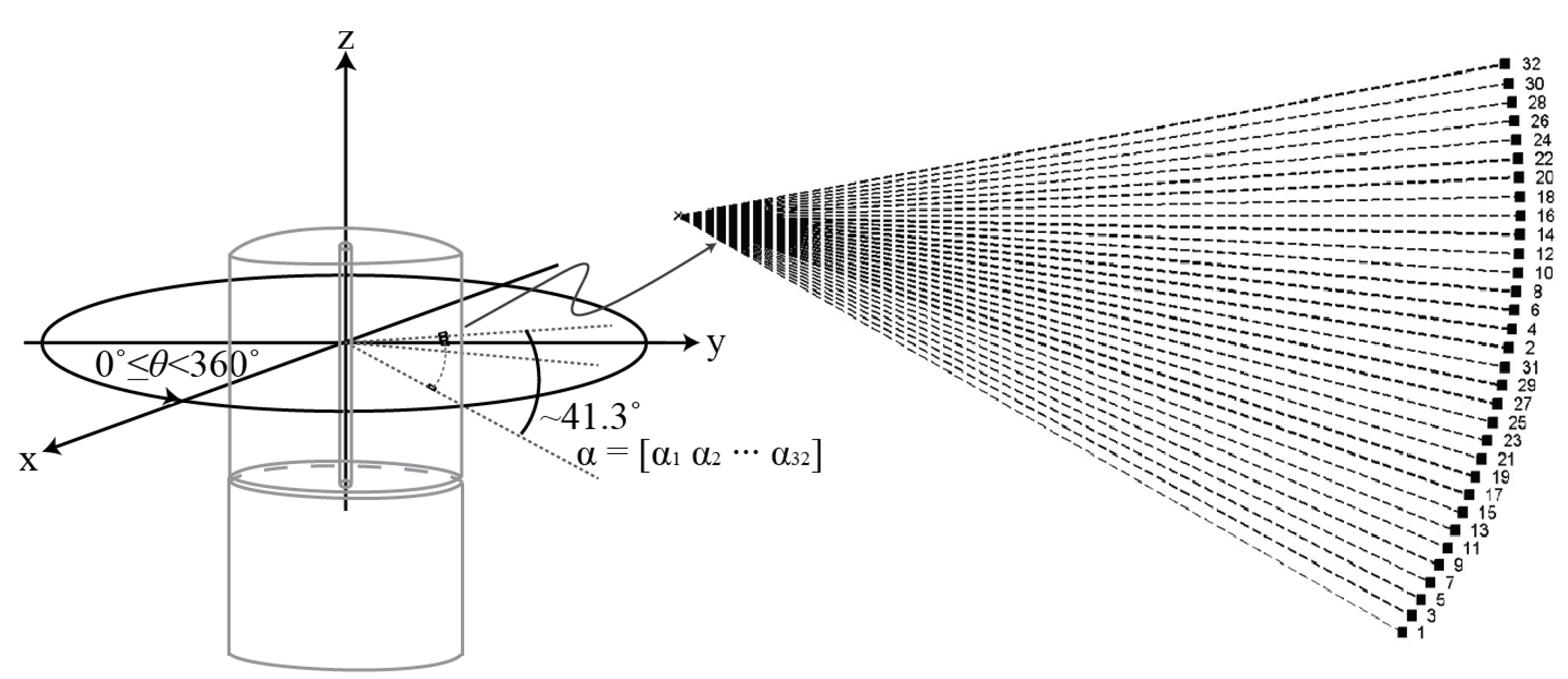
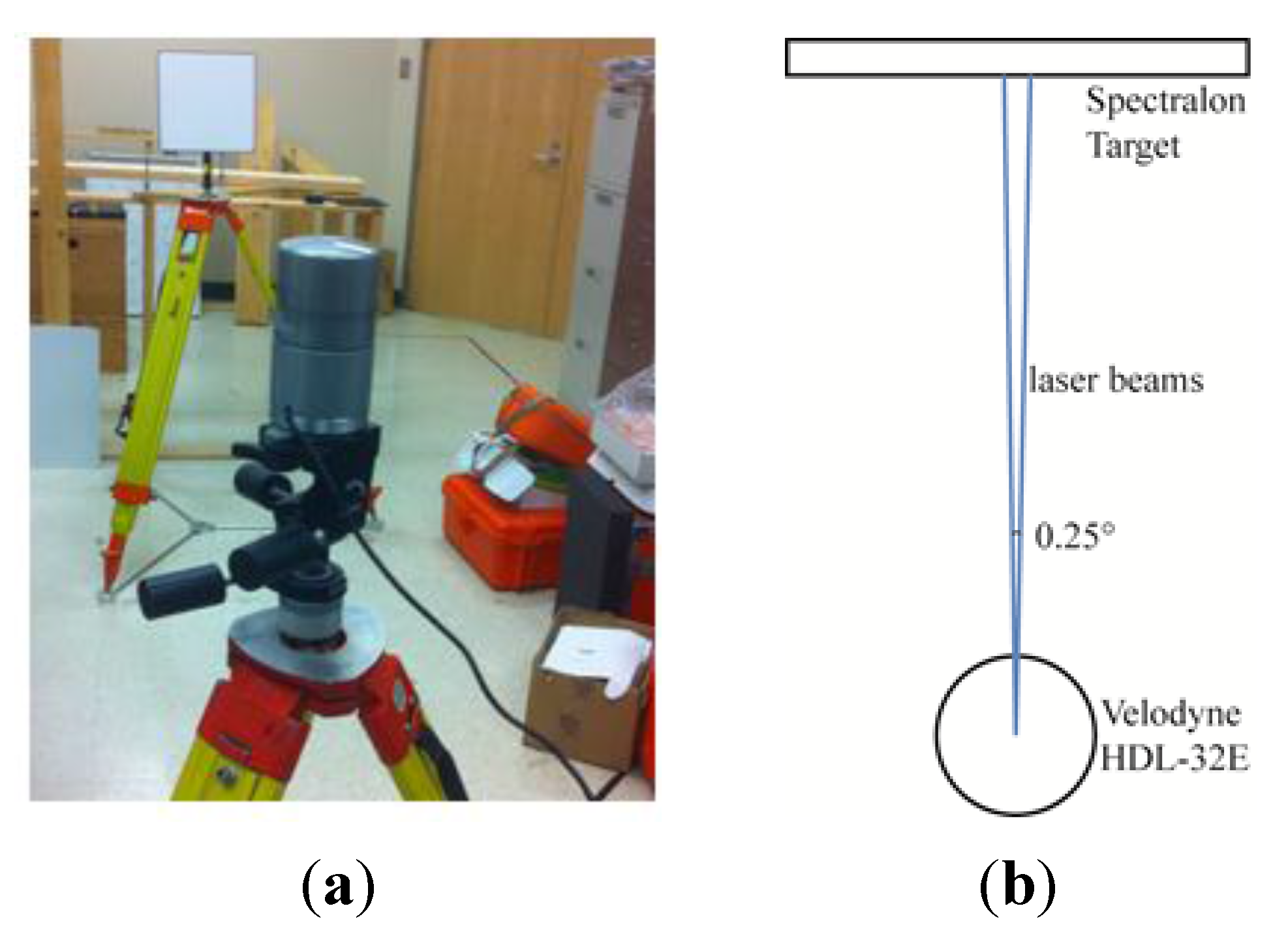
2.1. Velodyne HDL-32E LiDAR System
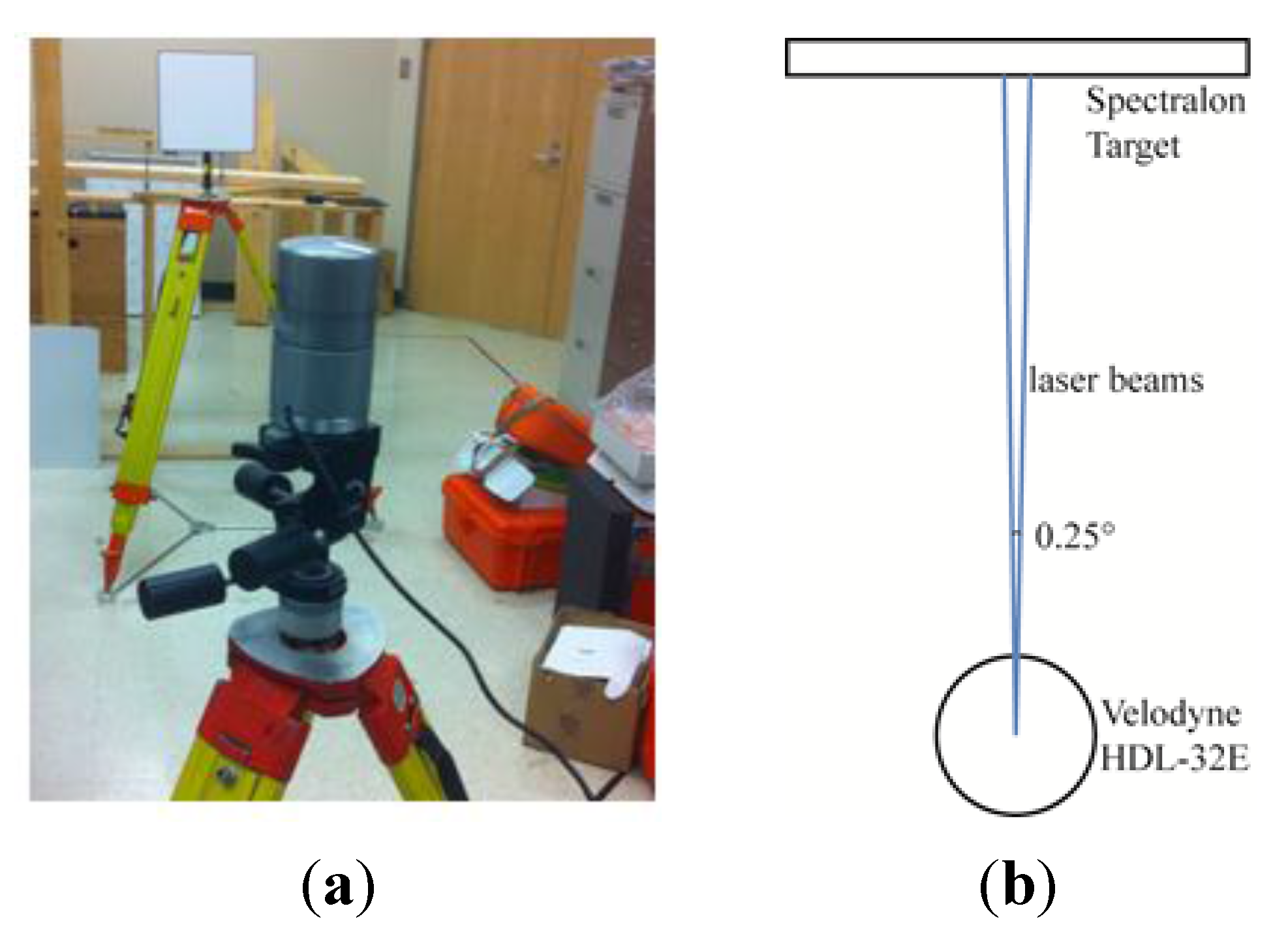
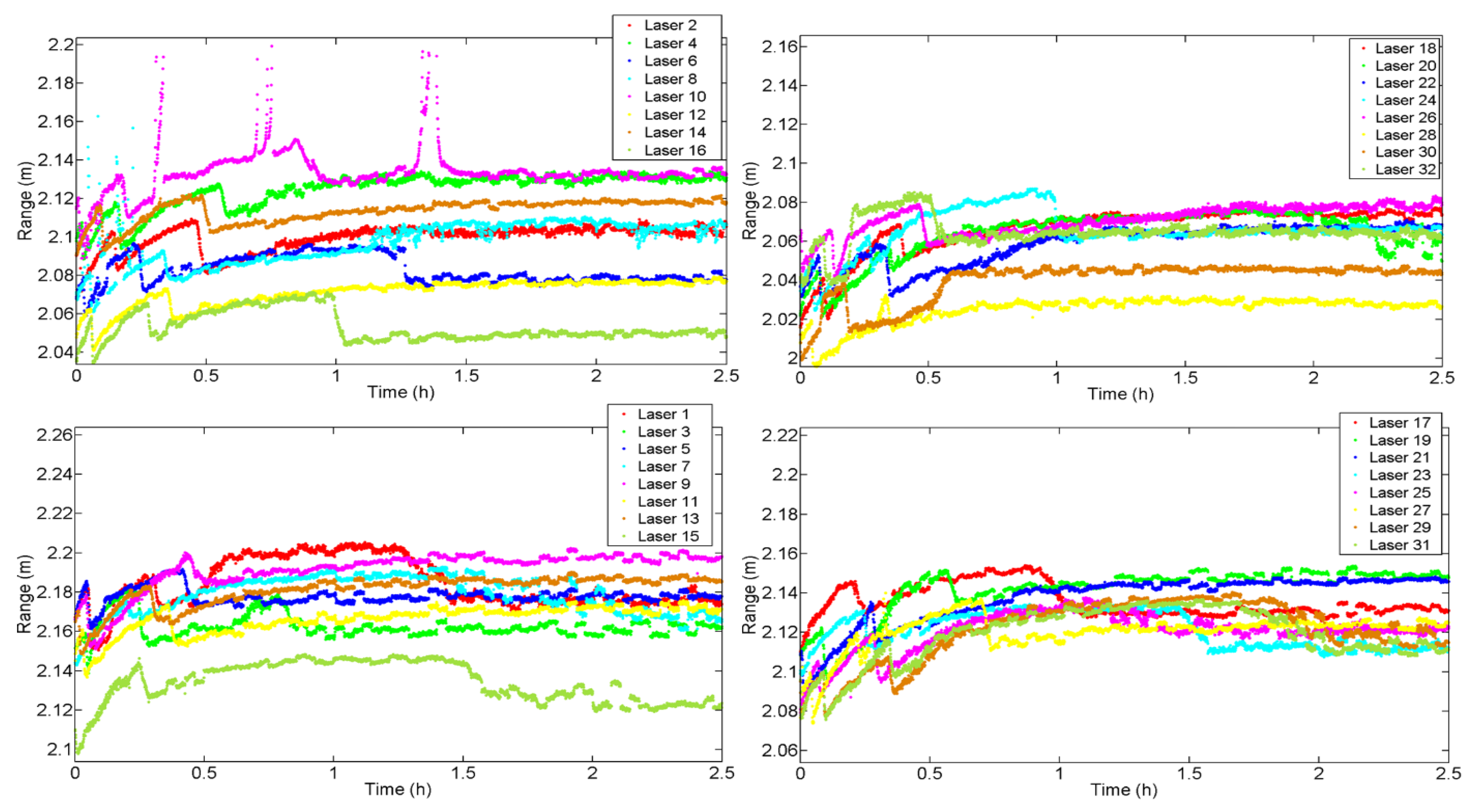
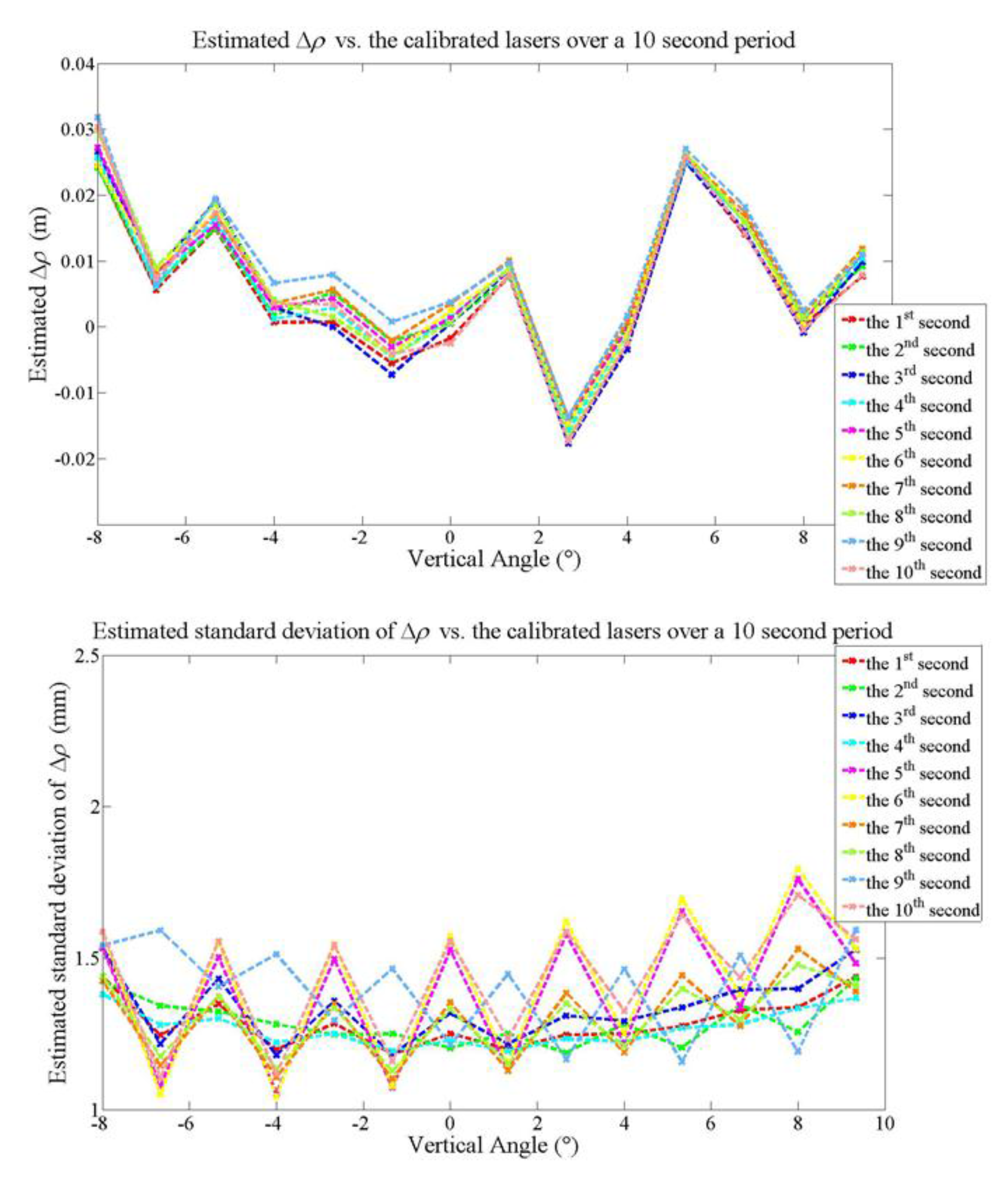
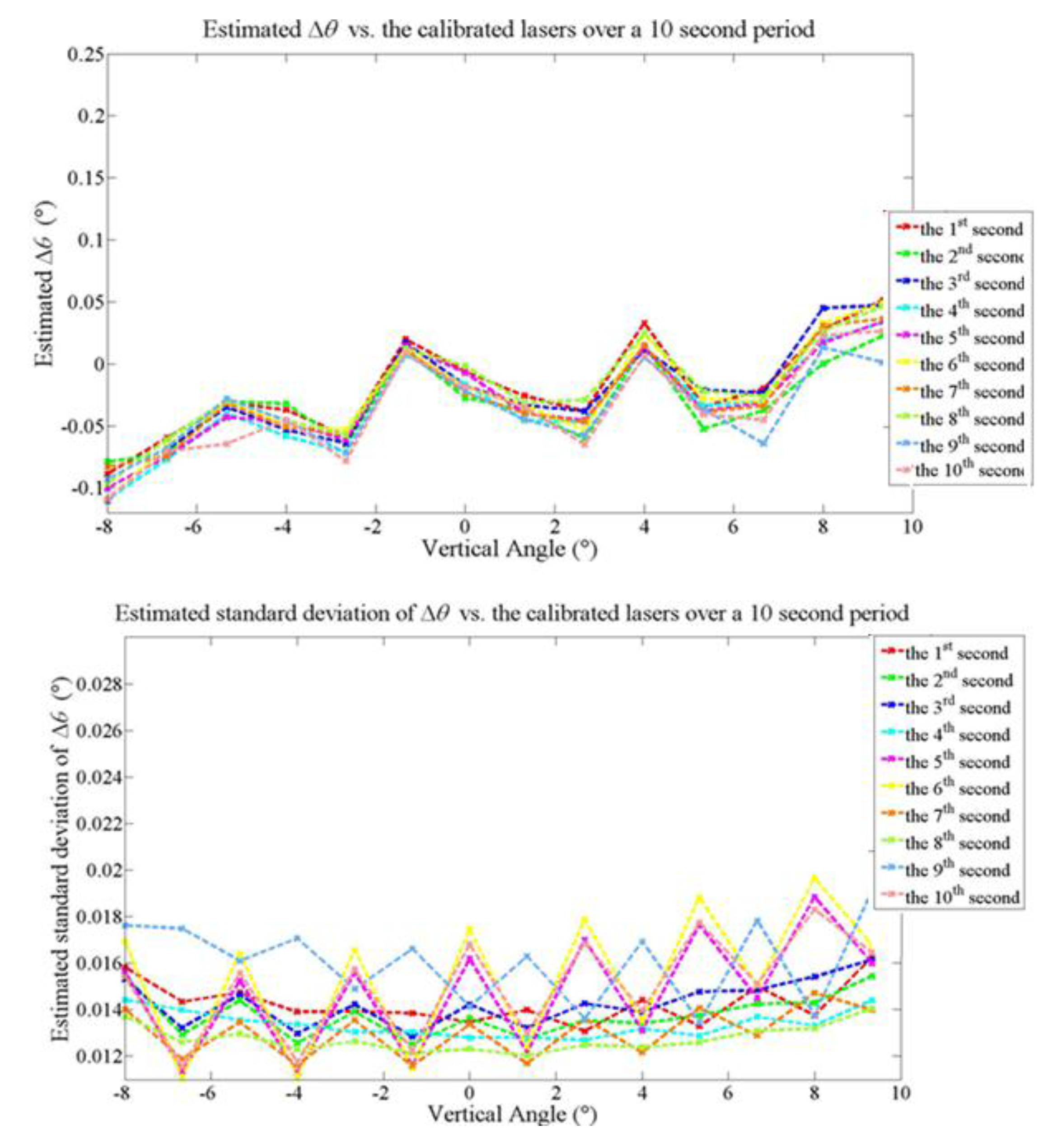
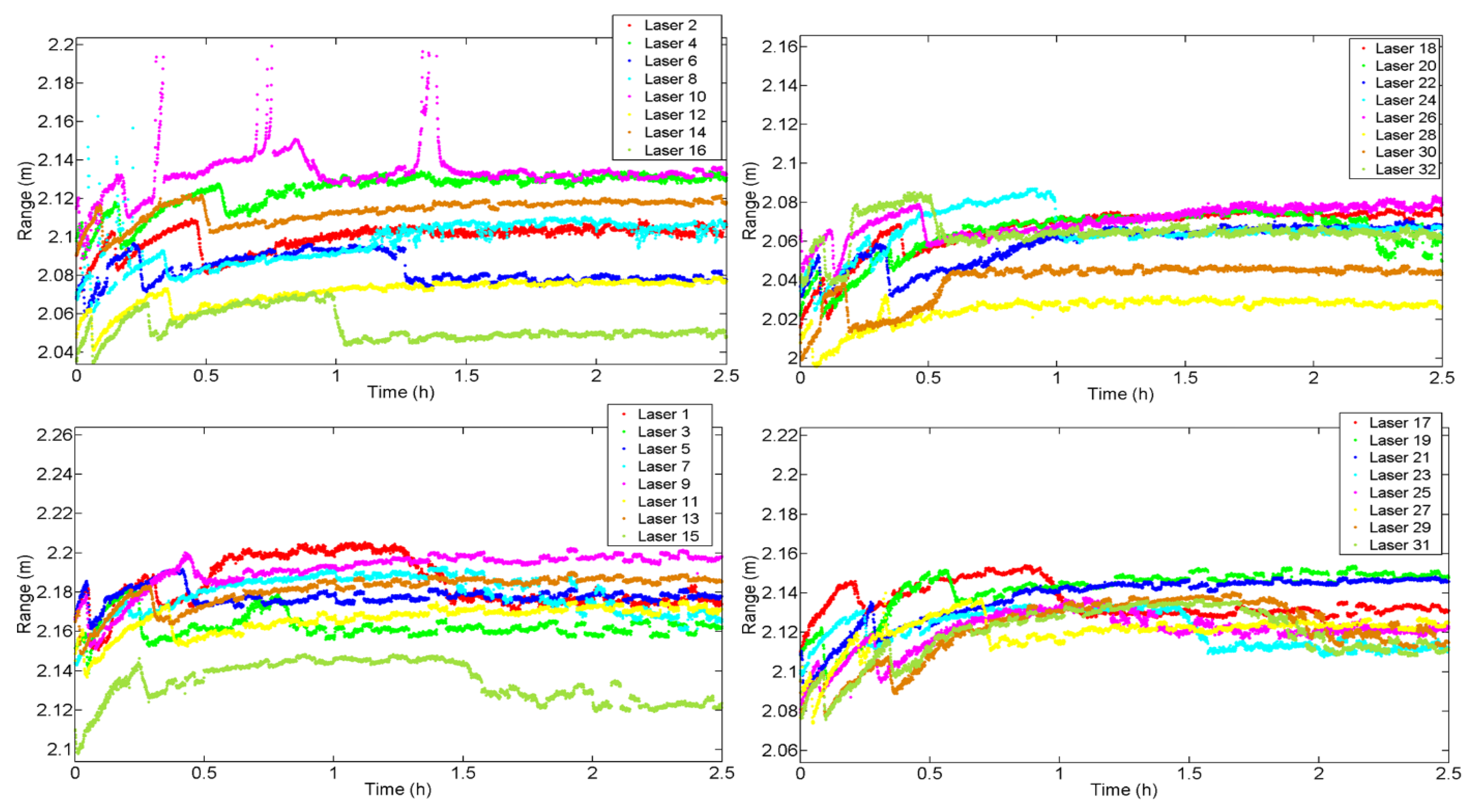
2.2. Temporal Stability of the Range Measurement
3. Proposed Automatic Calibration Methodology

3.1. Functional Model for the Calibration
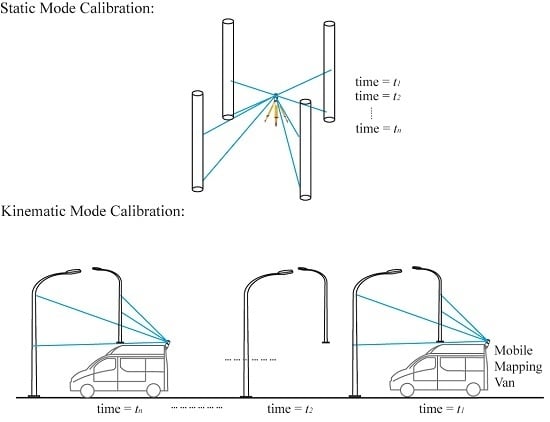
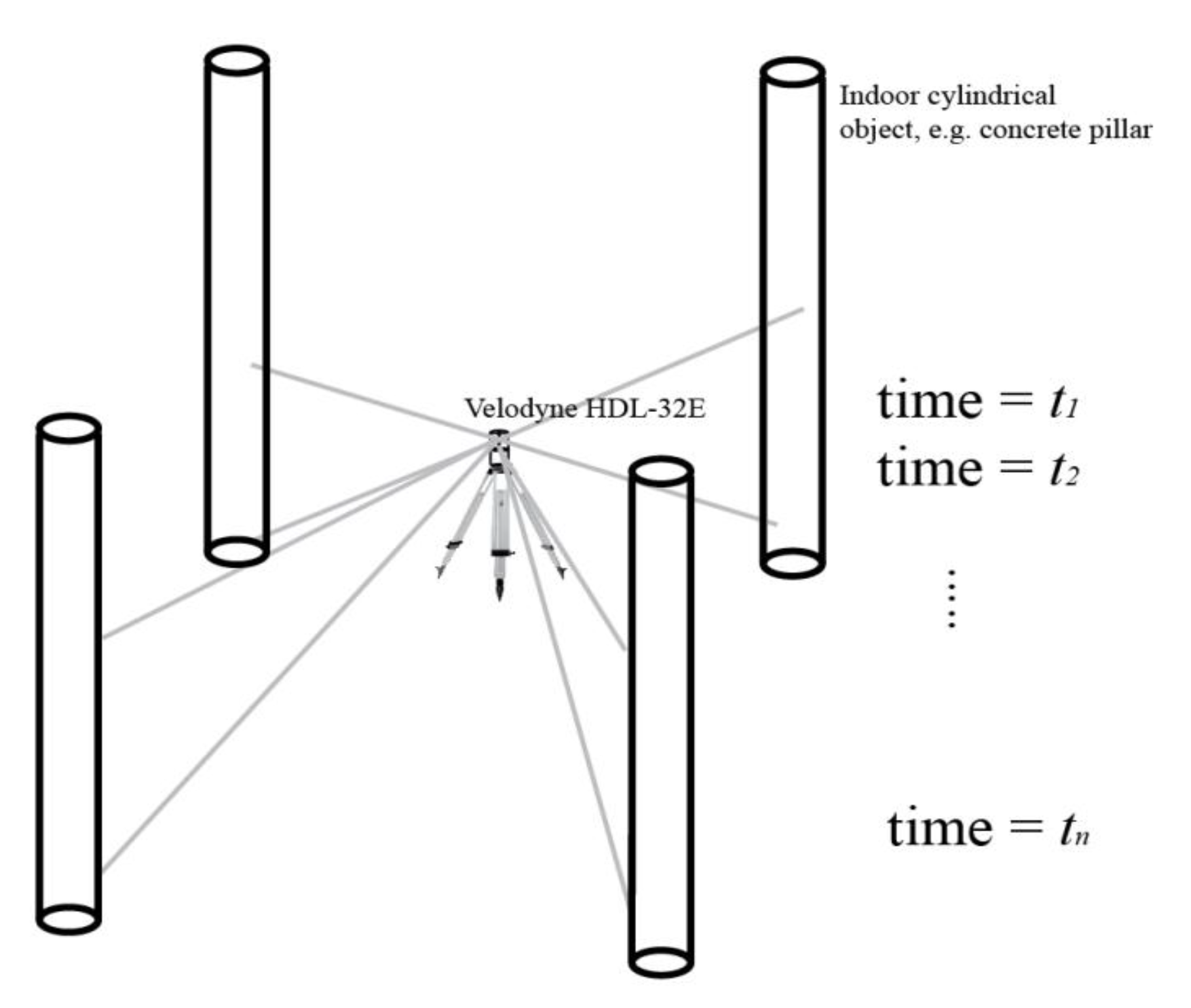
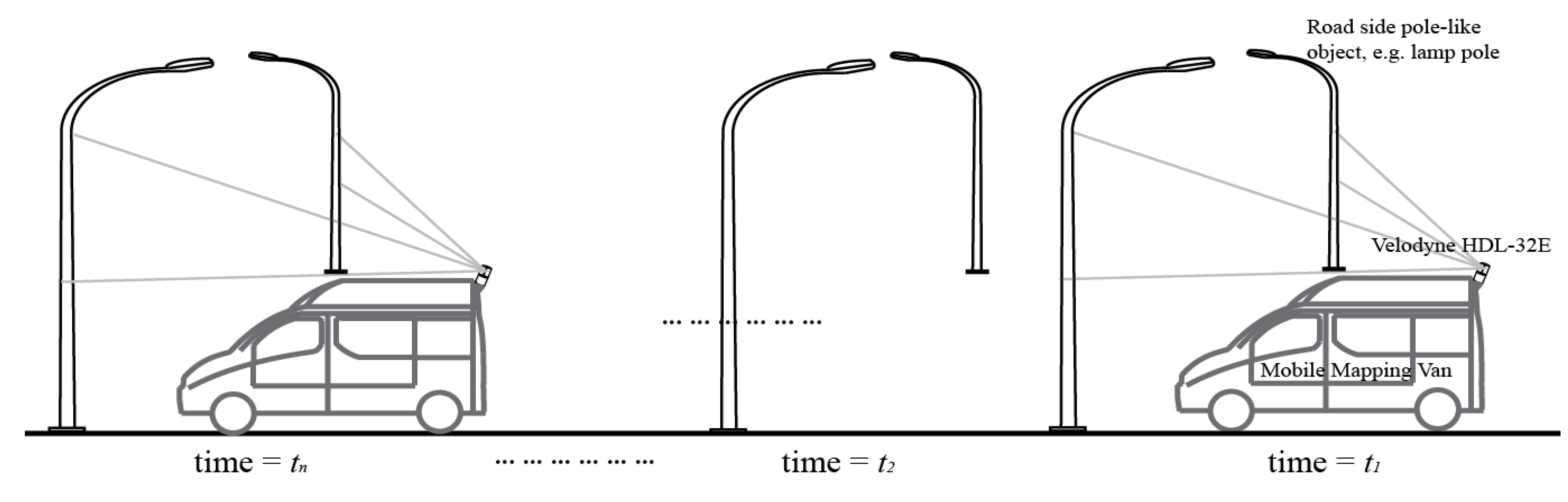
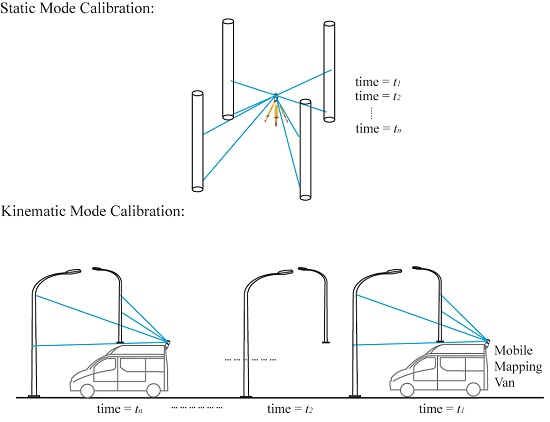
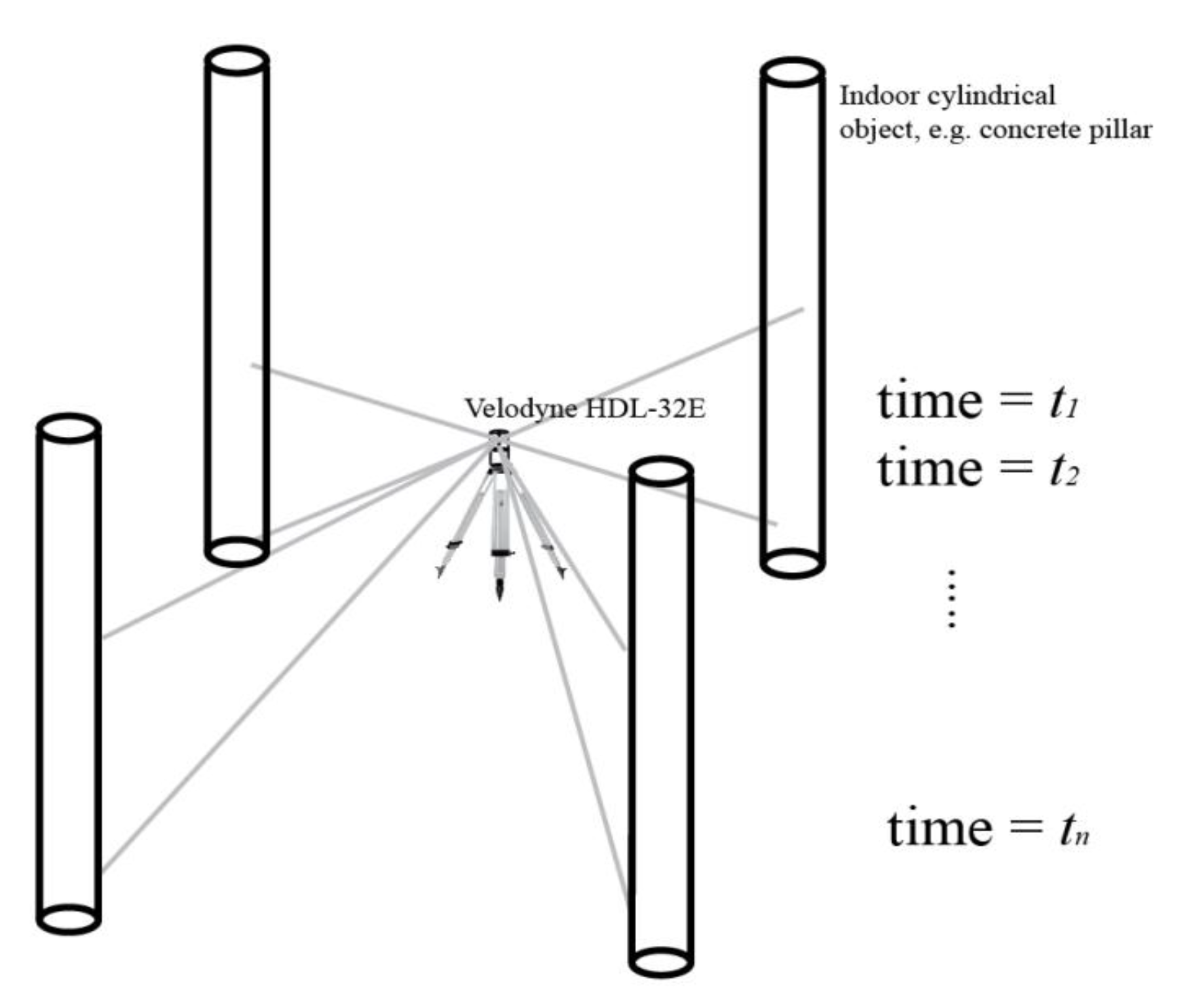
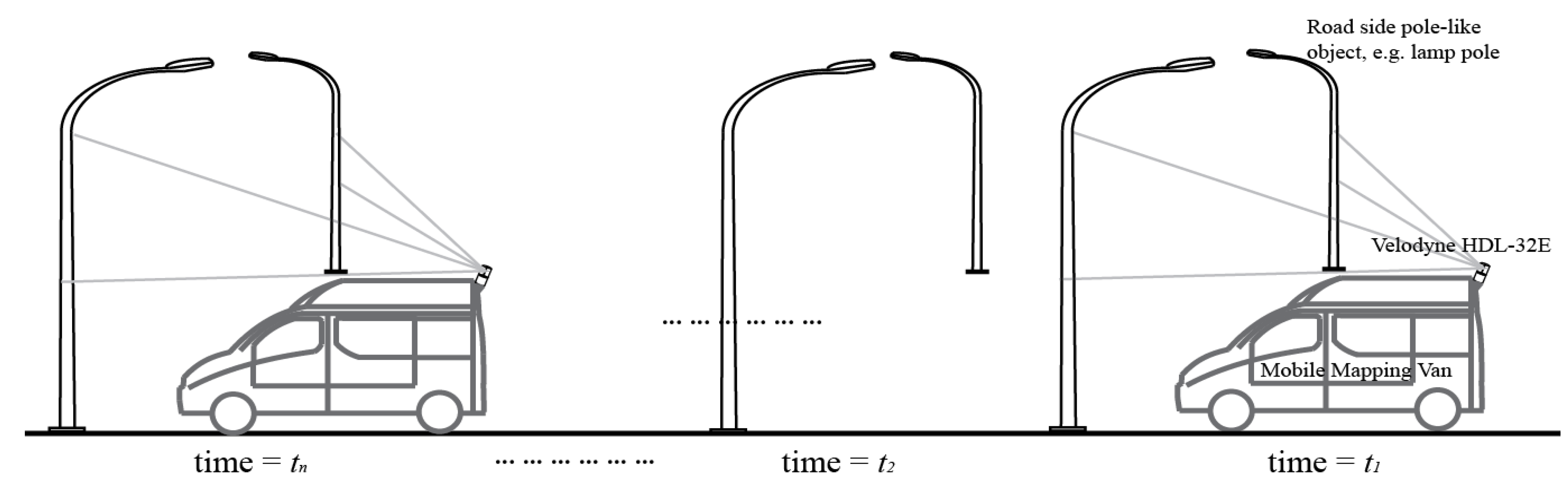
3.2. Calibration Configuration
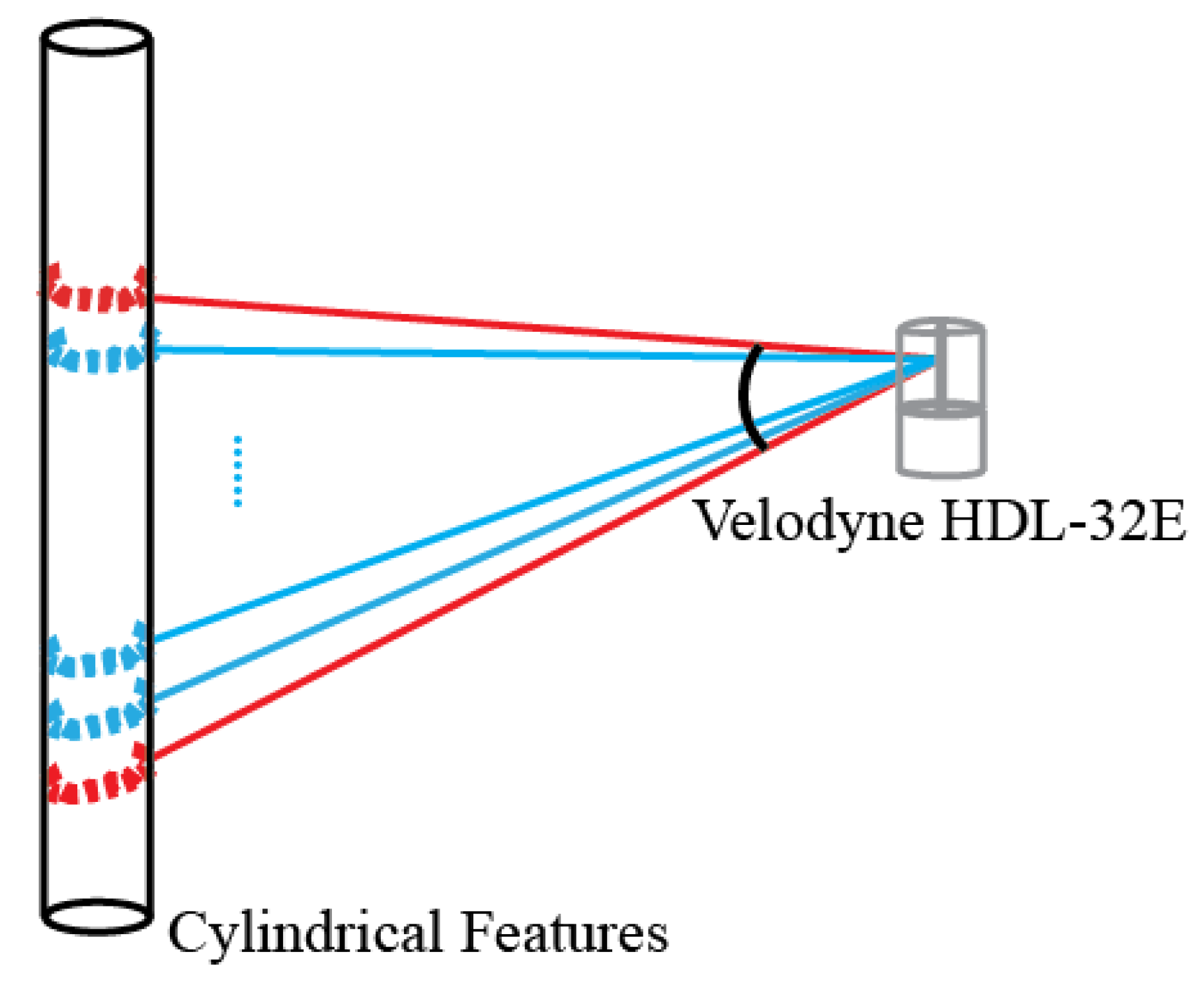
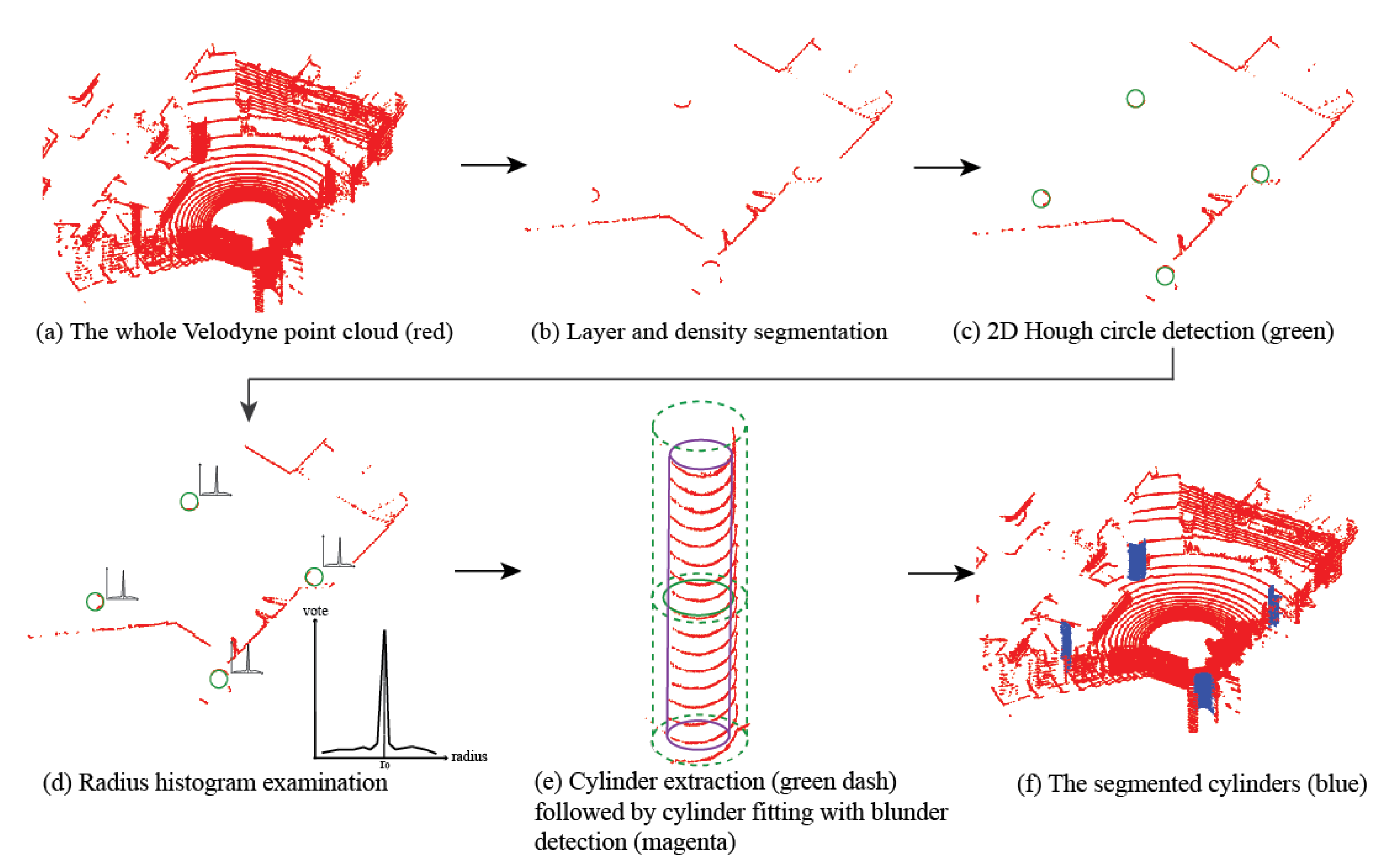
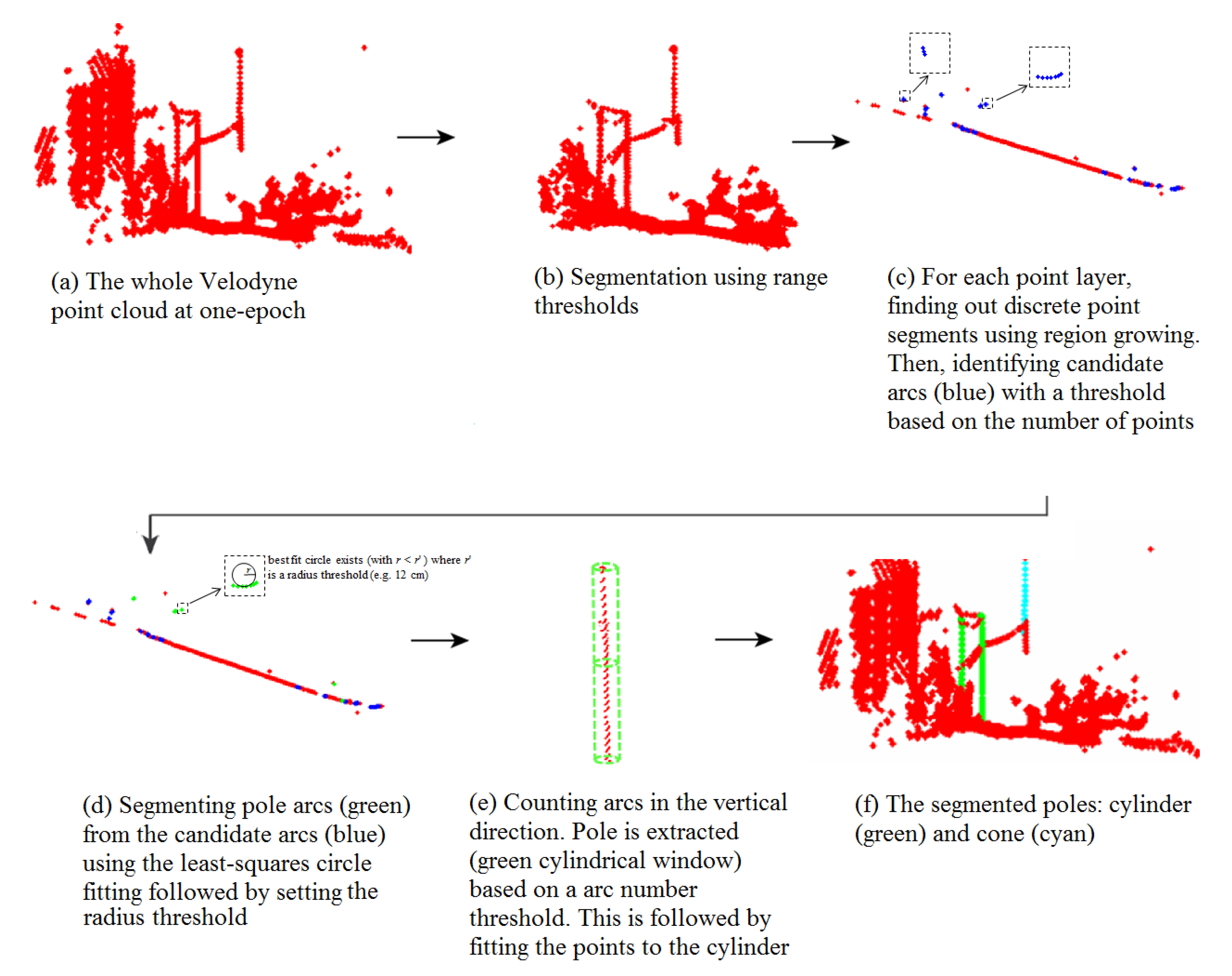
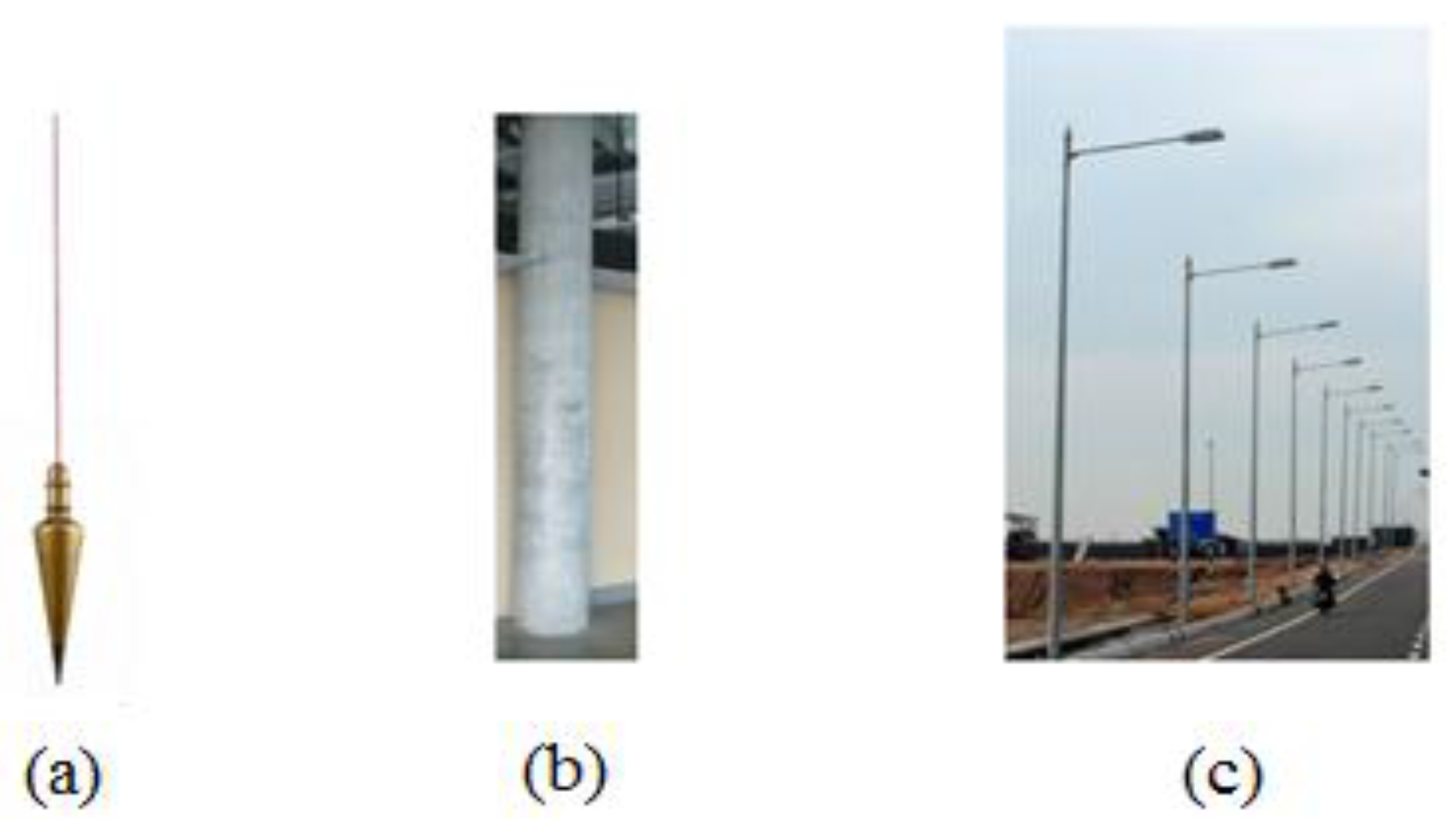
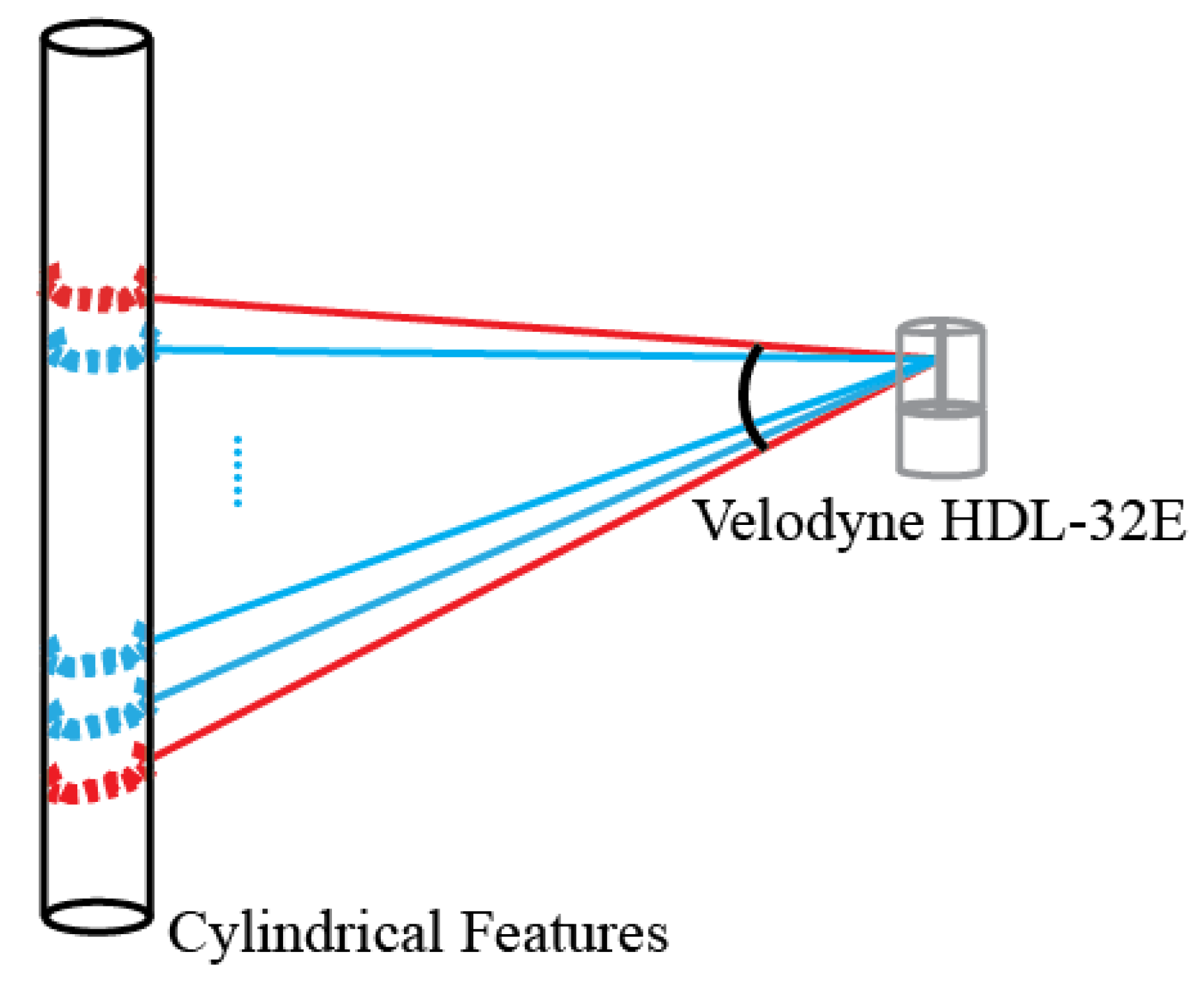
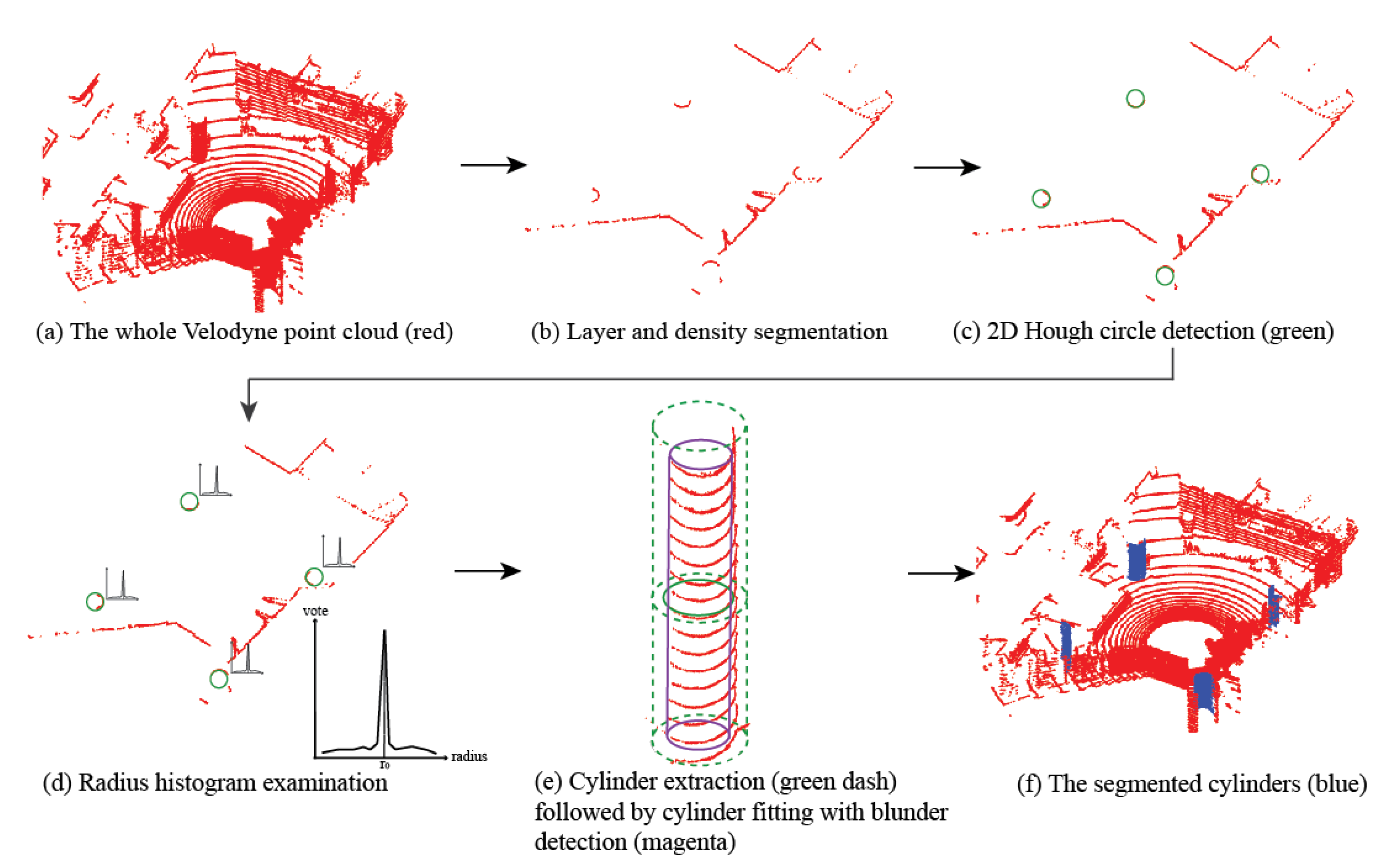
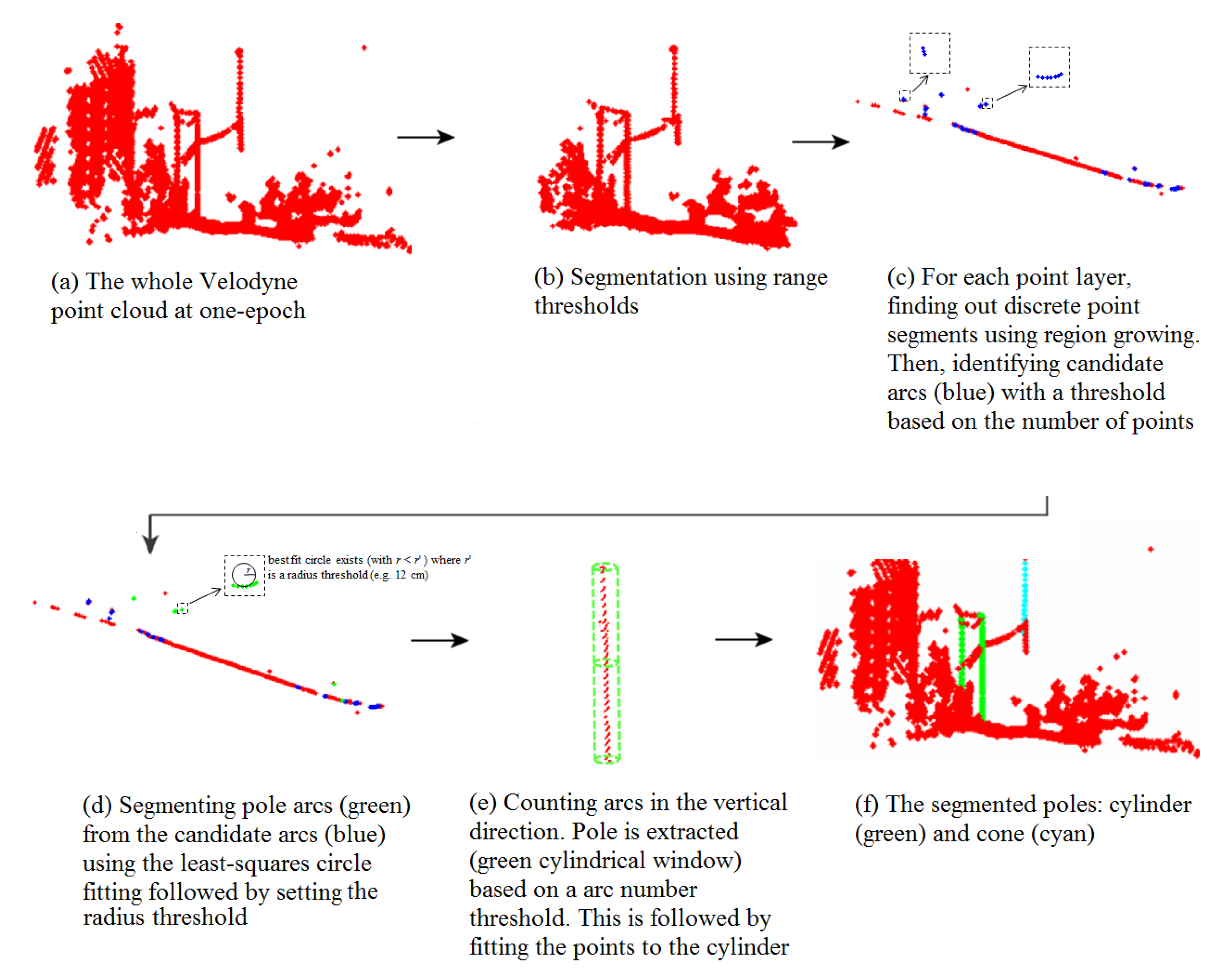
3.3. Cylindrical Feature Detection for the Calibration
4. Experiment
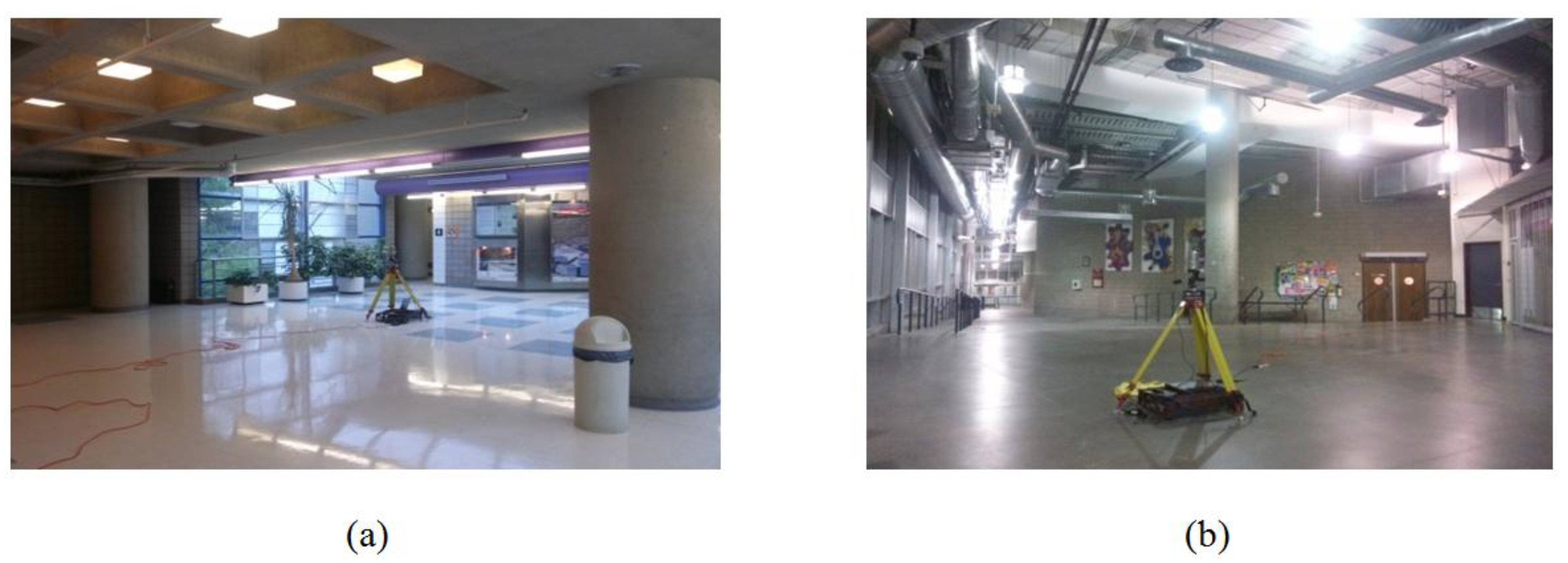
4.1. Static Mode Calibration Dataset
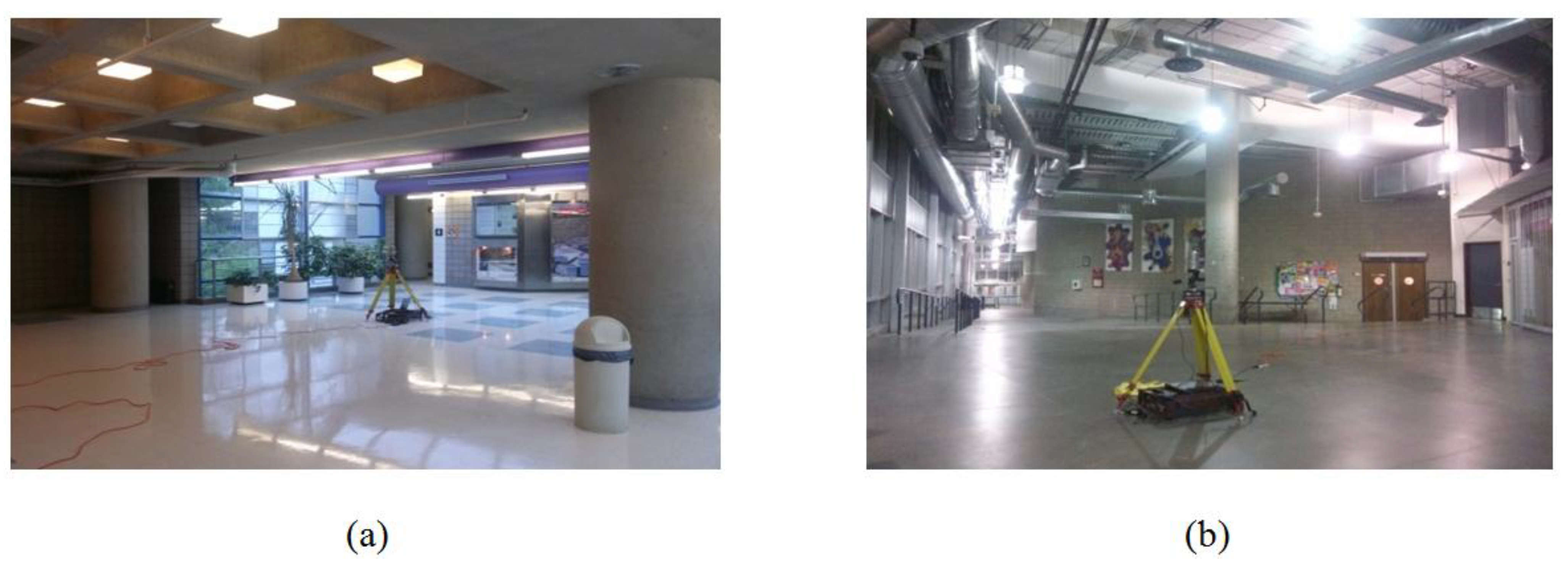
4.2. Kinematic Mode Calibration Dataset

5. Results and Discussion
5.1. Static Mode Calibration
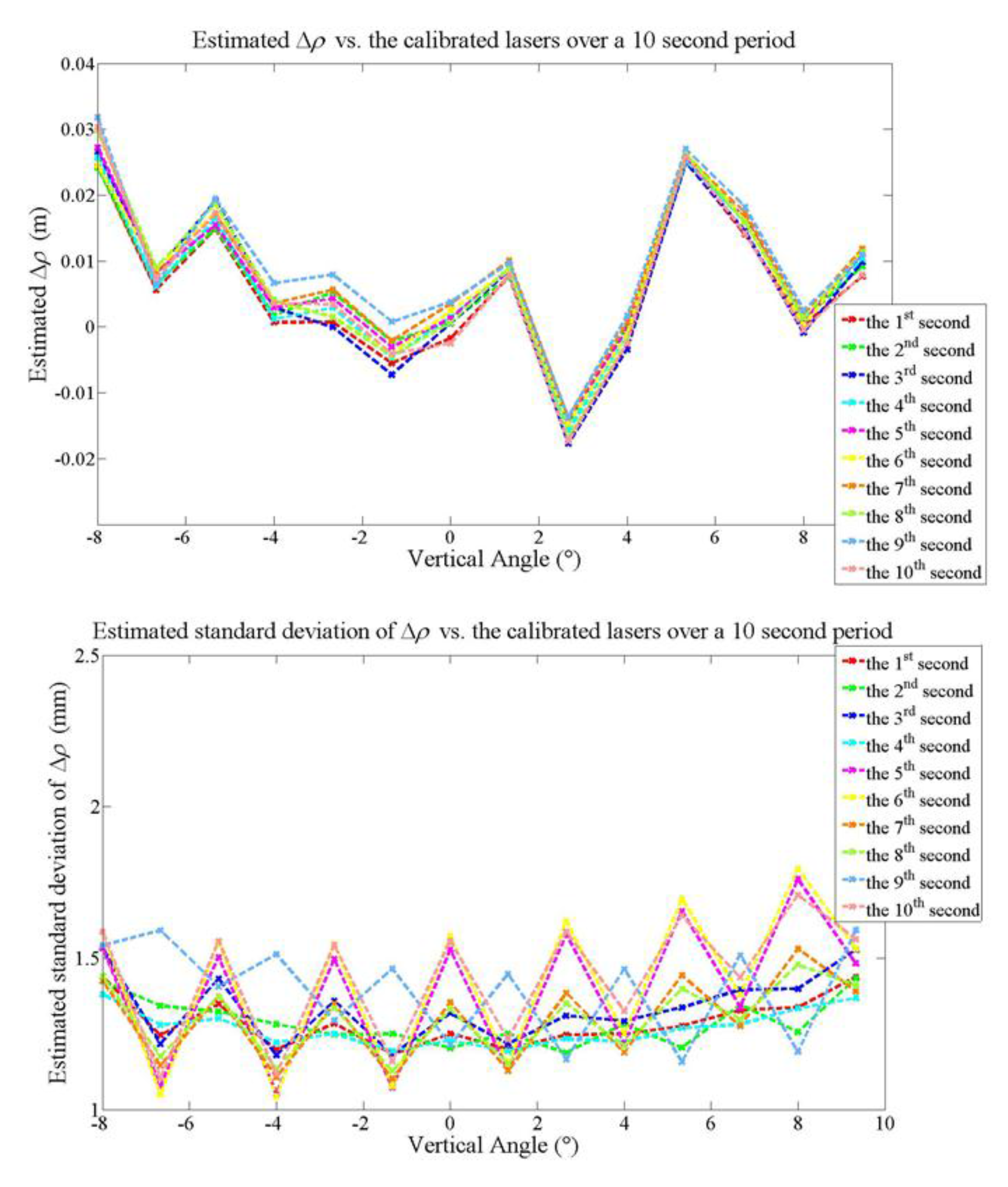
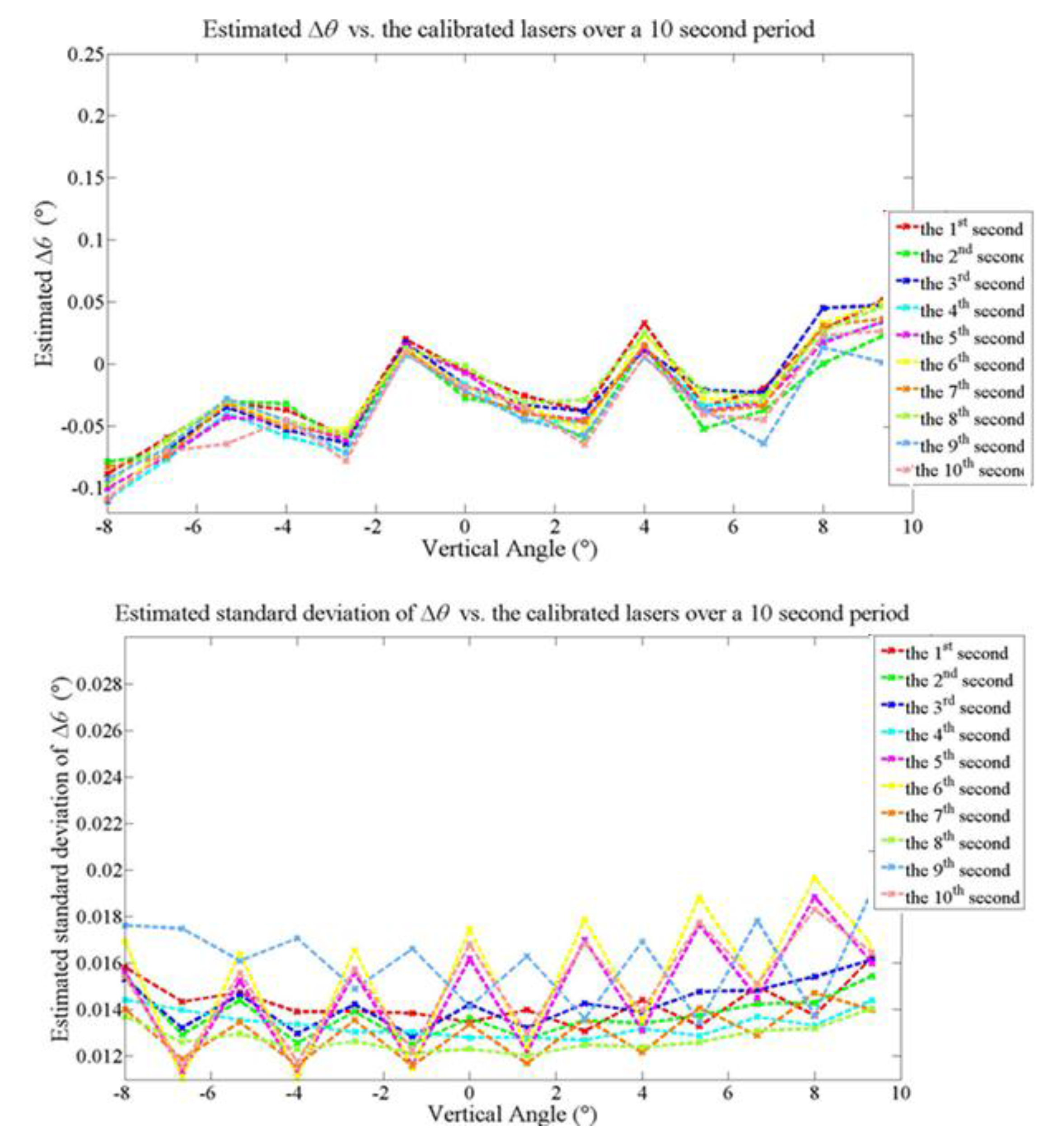
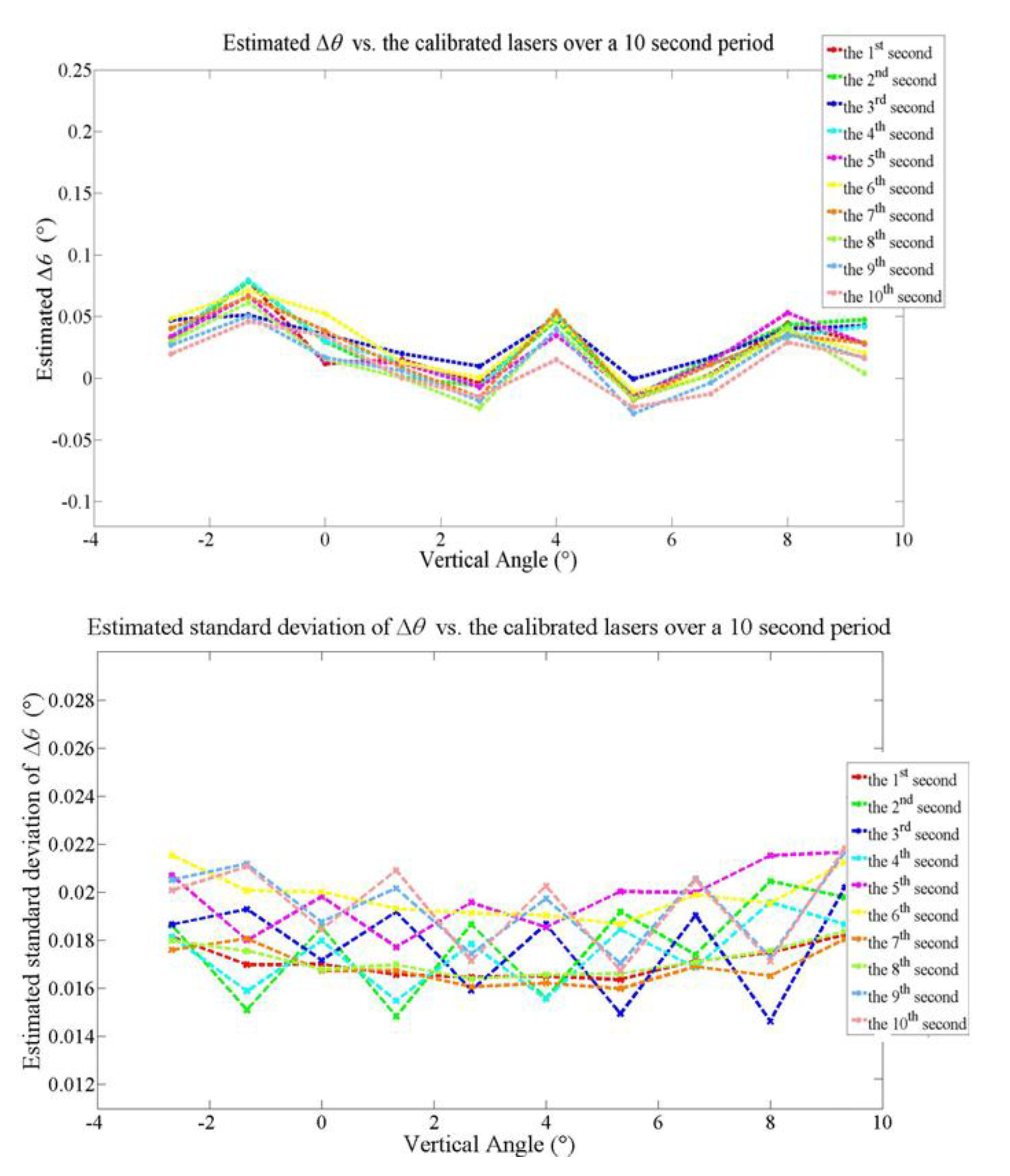
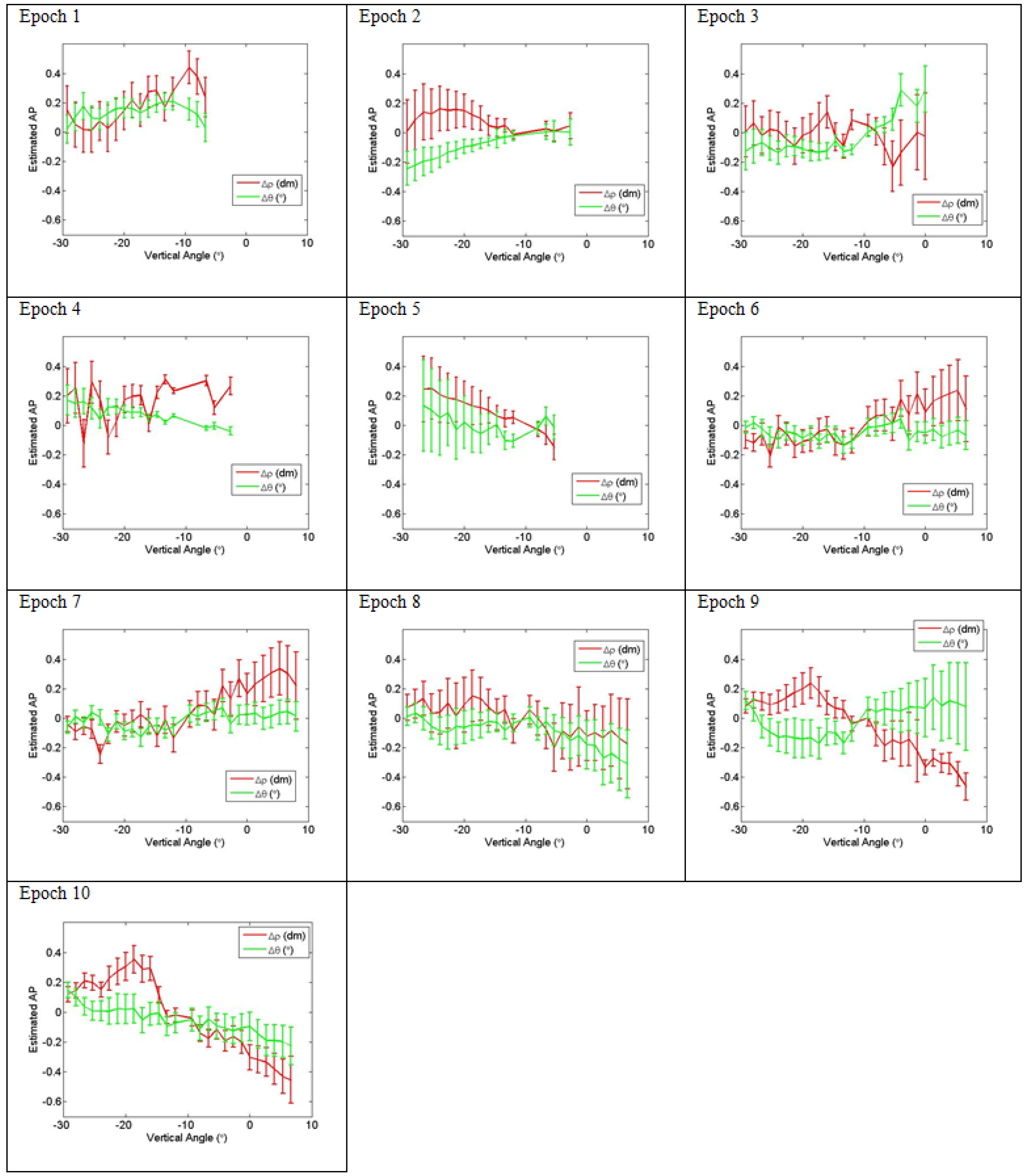
5.1.1. Estimated Parameters
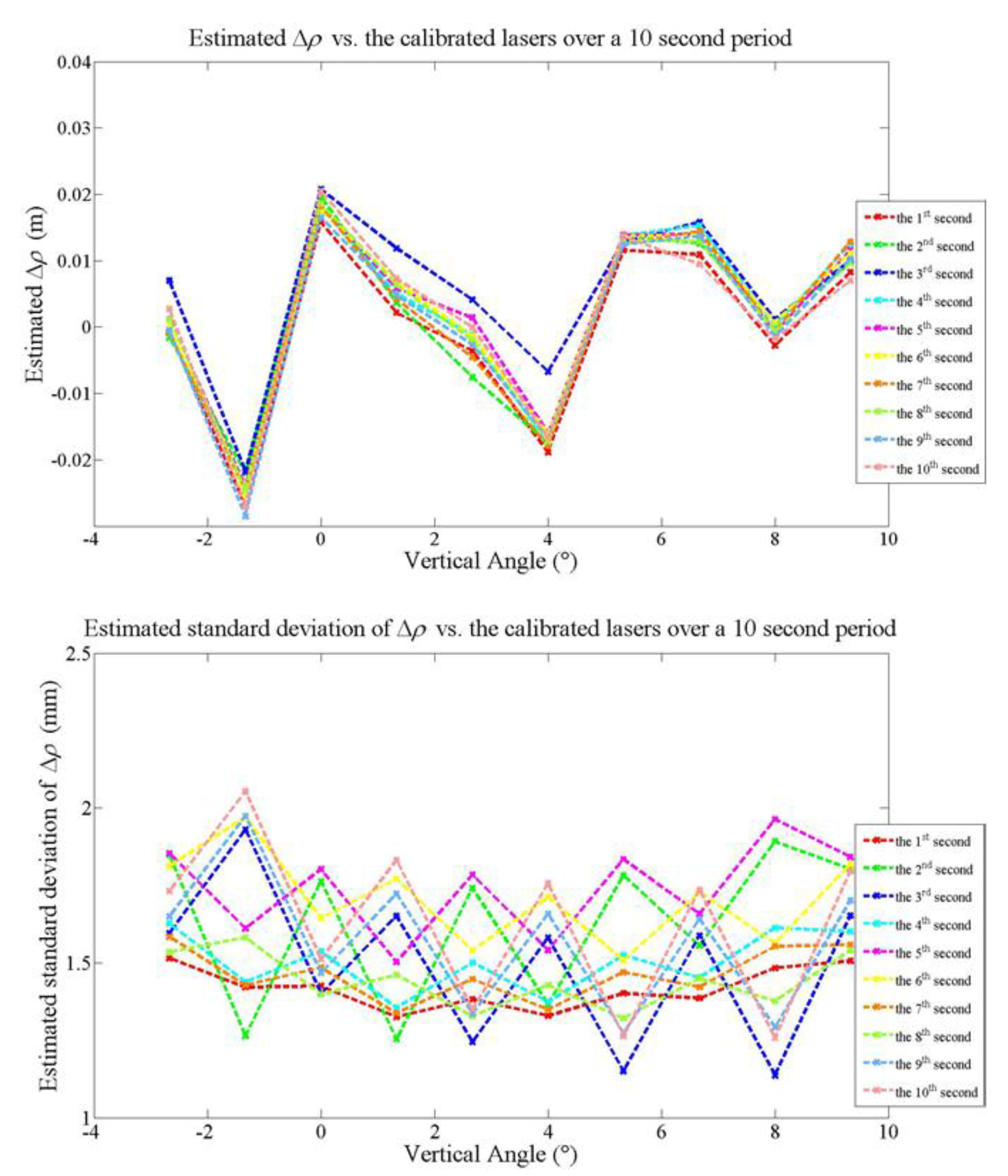
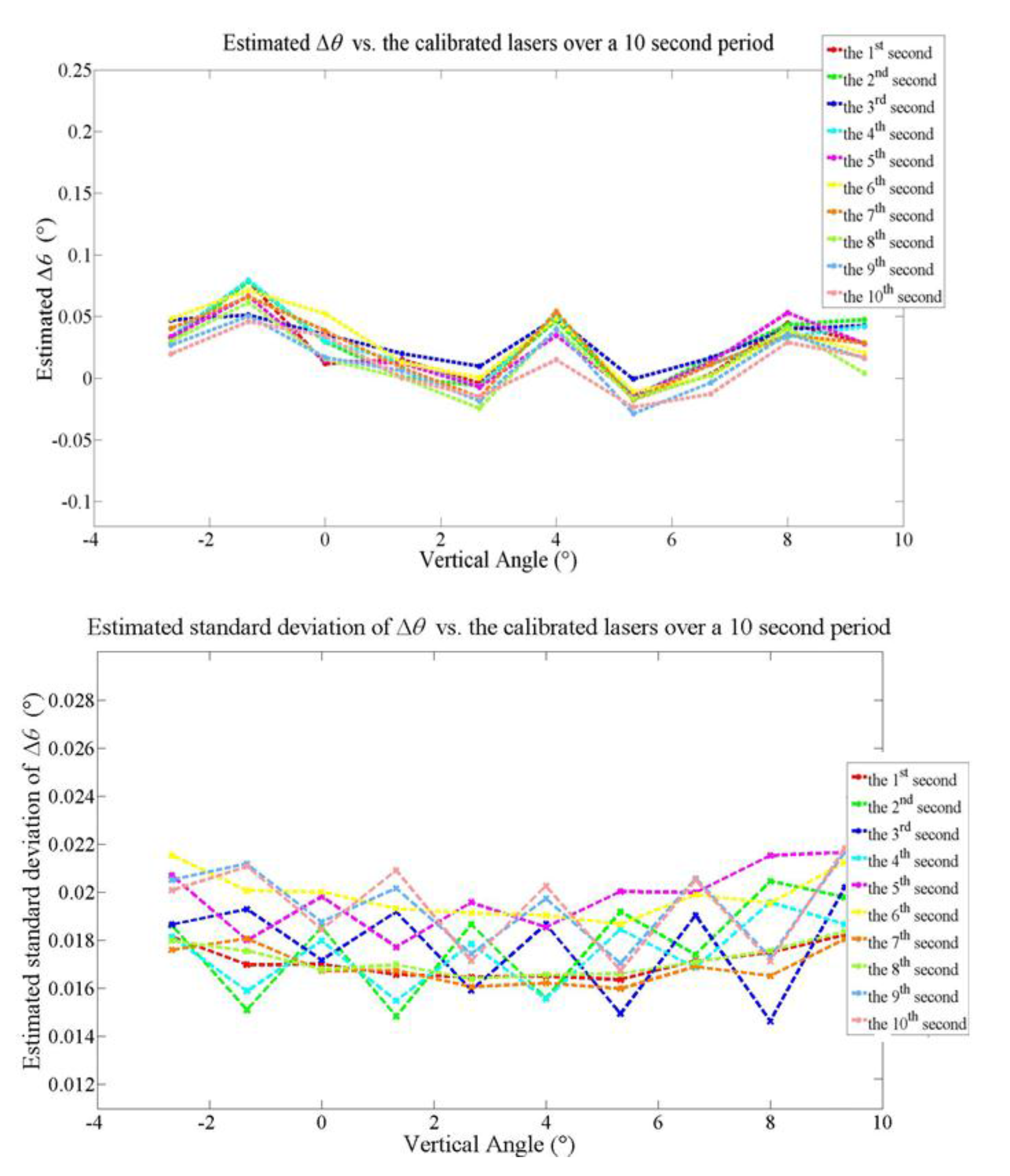
5.1.2. Calibration Accuracy

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Epoch | Dataset 1 | Dataset 2 | ||||
|---|---|---|---|---|---|---|
| Before (m) | After (m) | Improvement (%) | Before (m) | After (m) | Improvement (%) | |
| 1 | 0.0220 | 0.0066 | 67.0 | 0.0172 | 0.0055 | 65.8 |
| 2 | 0.0220 | 0.0066 | 67.0 | 0.0272 | 0.0066 | 82.4 |
| 3 | 0.0238 | 0.0068 | 71.4 | 0.0180 | 0.0059 | 66.1 |
| 4 | 0.0238 | 0.0068 | 71.4 | 0.0299 | 0.0076 | 80.6 |
| 5 | 0.0232 | 0.0086 | 62.7 | 0.0179 | 0.0060 | 73.0 |
| 6 | 0.0217 | 0.0078 | 64.1 | 0.0276 | 0.0060 | 79.8 |
| 7 | 0.0248 | 0.0087 | 65.2 | 0.0190 | 0.0068 | 64.5 |
| 8 | 0.0248 | 0.0087 | 65.2 | 0.0250 | 0.0076 | 69.7 |
| 9 | 0.0254 | 0.0079 | 69.0 | 0.0189 | 0.0060 | 64.8 |
| 10 | 0.0254 | 0.0083 | 69.0 | 0.0273 | 0.0071 | 70.7 |
| Mean Improvement (%) | 67.8 | 71.7 | ||||
5.2. Kinematic Mode Calibration
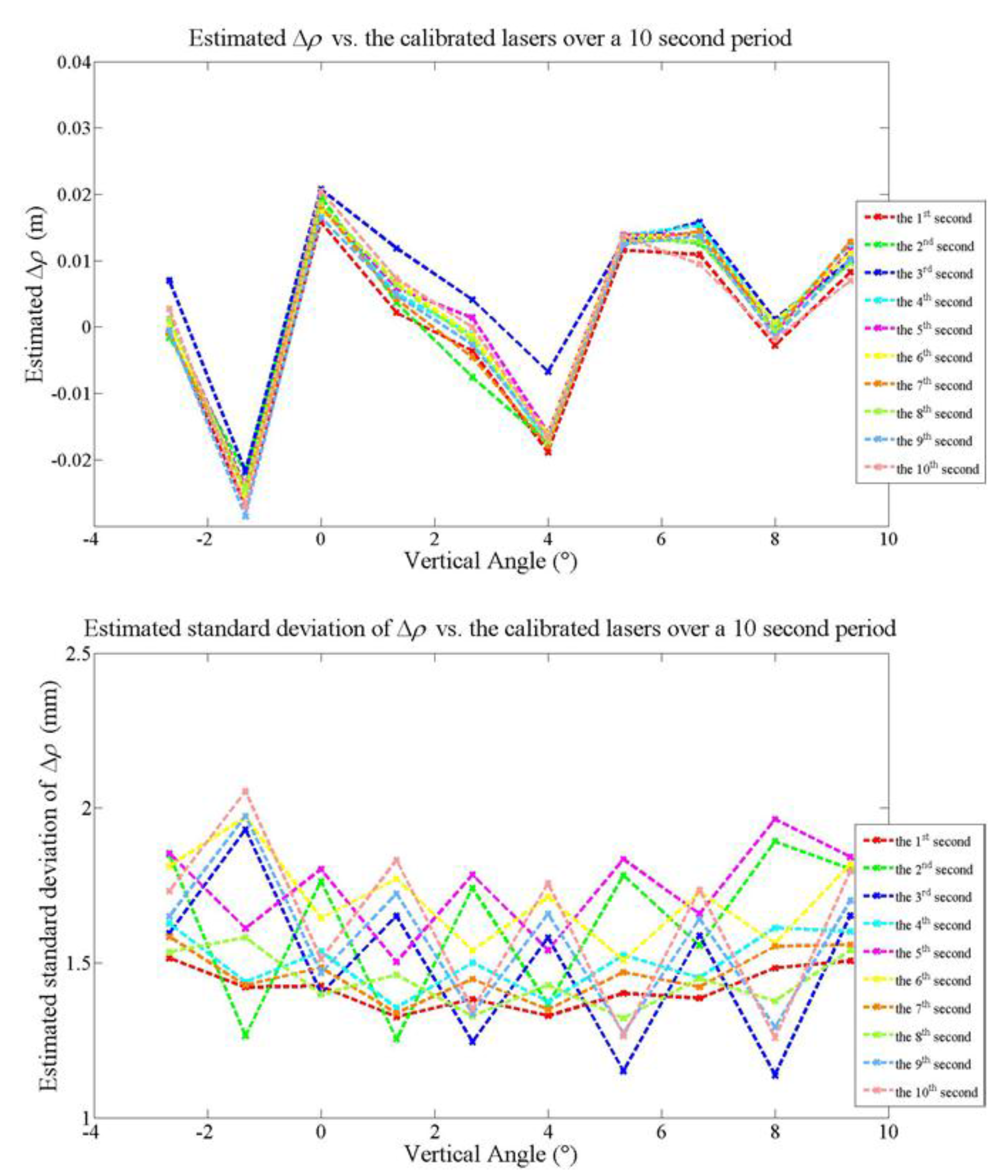
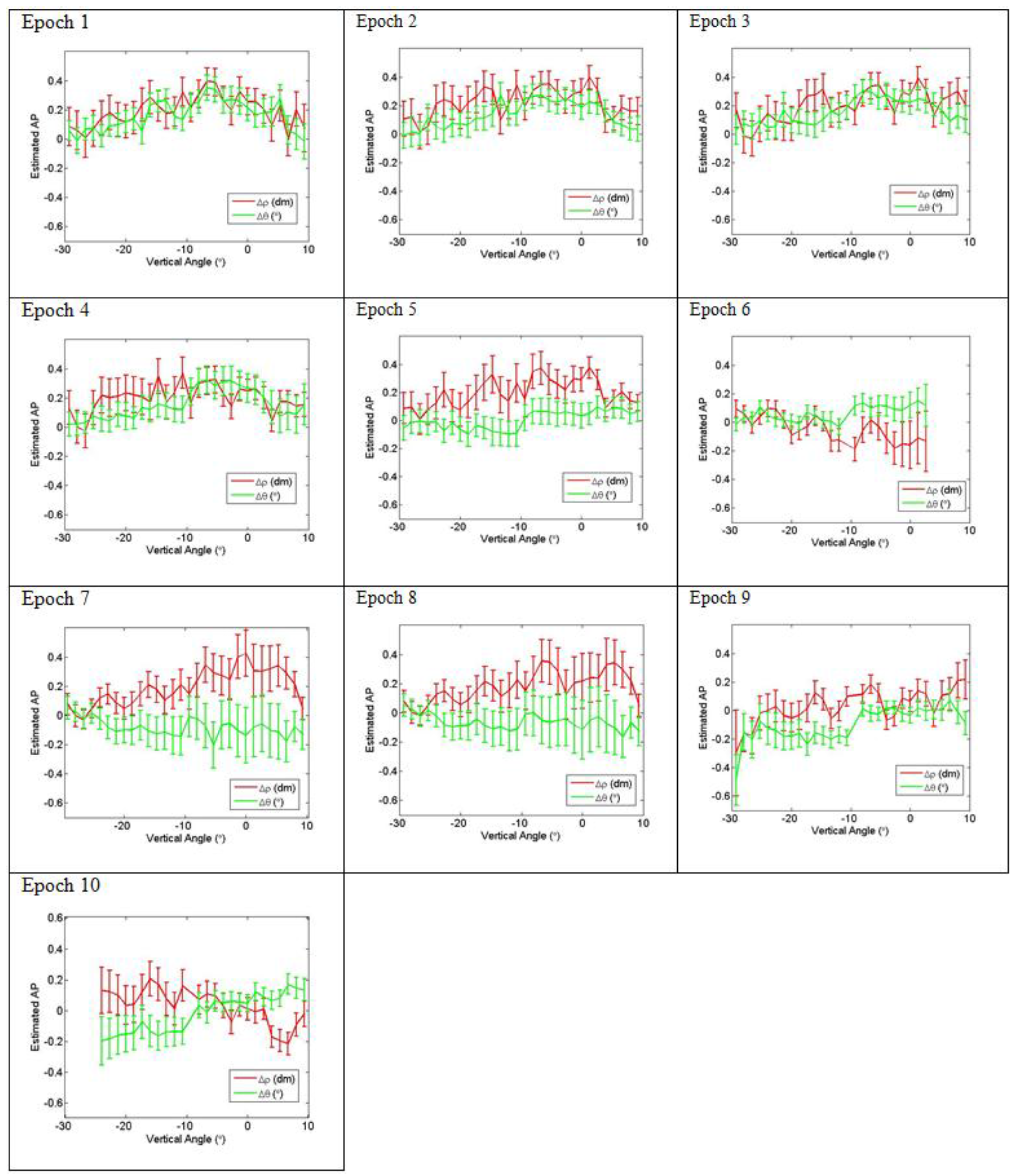
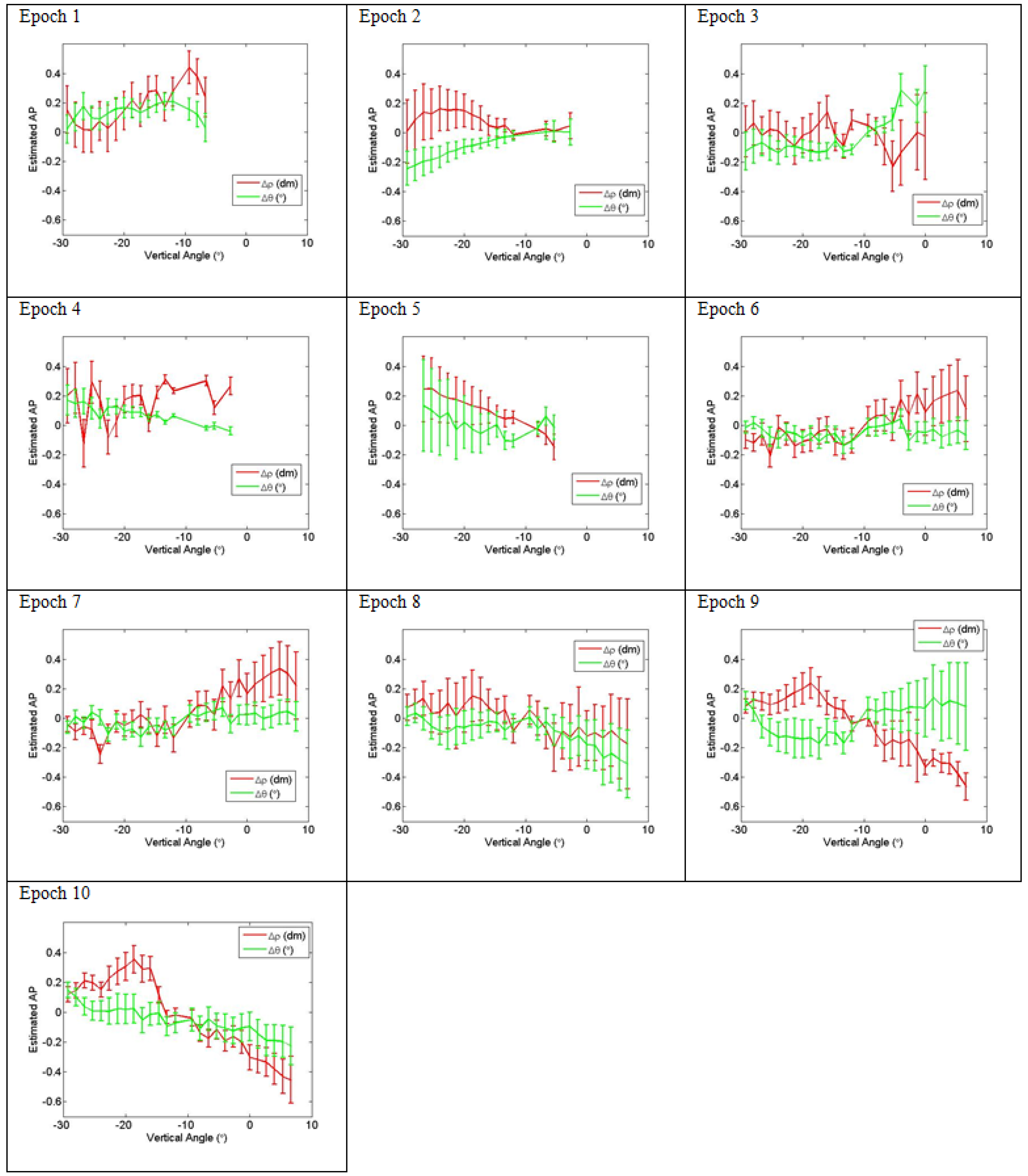
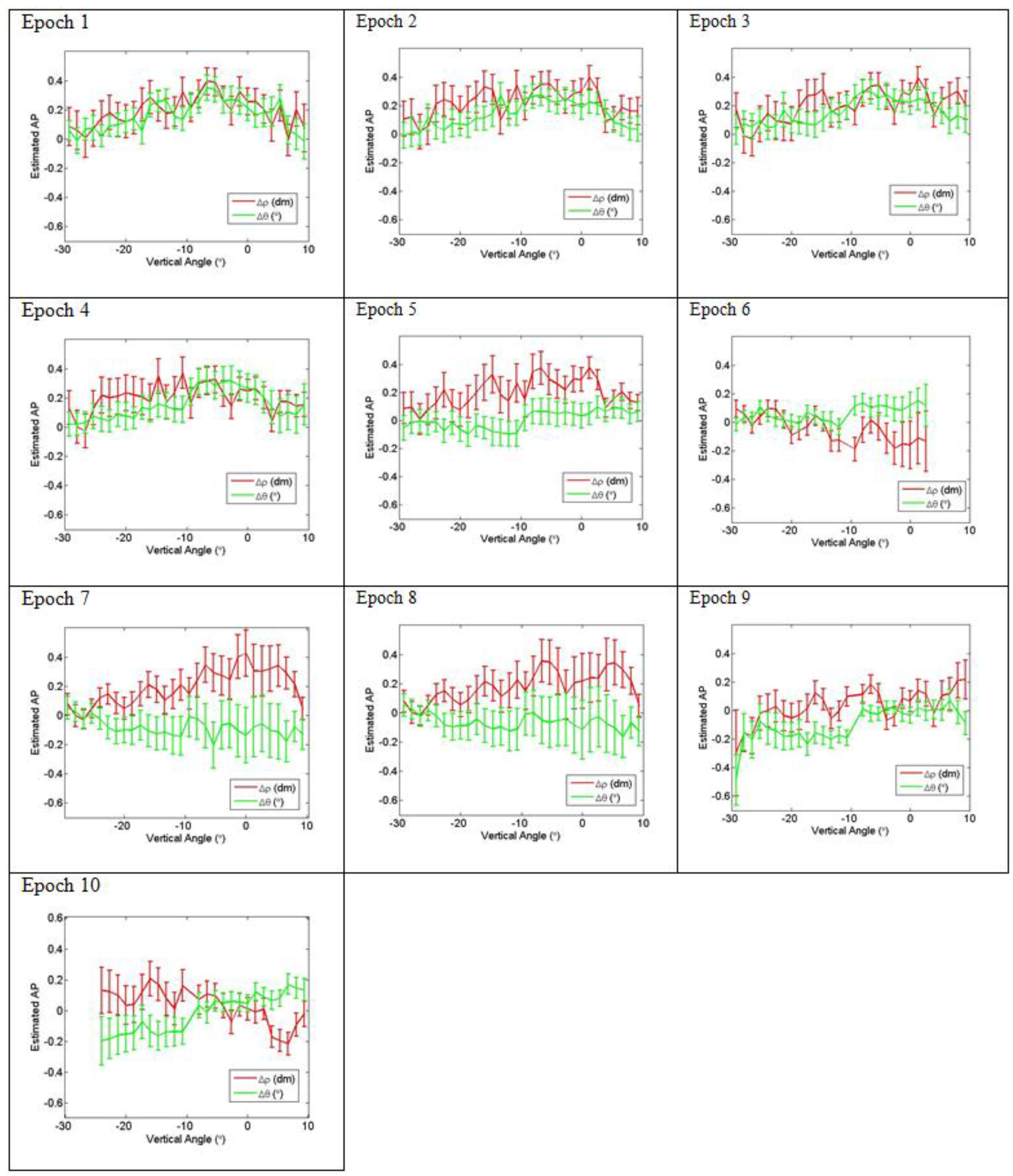
5.2.1. Estimated Parameters
5.2.2. Calibration Accuracy
| Epoch | Dataset 3 | Dataset 4 | ||||
|---|---|---|---|---|---|---|
| Before (m) | After (m) | Improvement (%) | Before (m) | After (m) | Improvement (%) | |
| 1 | 0.0621 | 0.0489 | 21.2 | 0.0224 | 0.0120 | 46.4 |
| 2 | 0.0320 | 0.0238 | 25.6 | 0.0216 | 0.0151 | 30.1 |
| 3 | 0.0211 | 0.0143 | 32.3 | 0.0298 | 0.0130 | 56.4 |
| 4 | 0.0298 | 0.0162 | 45.6 | 0.0224 | 0.0189 | 15.6 |
| 5 | 0.0328 | 0.0228 | 30.5 | 0.0218 | 0.0105 | 60.0 |
| 6 | 0.0090 | 0.0043 | 52.6 | 0.0147 | 0.0065 | 56.2 |
| 7 | 0.0133 | 0.0074 | 44.7 | 0.0082 | 0.0063 | 22.6 |
| 8 | 0.0196 | 0.0122 | 37.9 | 0.0157 | 0.0076 | 51.3 |
| 9 | 0.0205 | 0.0081 | 60.7 | 0.0282 | 0.0245 | 13.1 |
| 10 | 0.0119 | 0.0045 | 62.1 | 0.0372 | 0.0182 | 51.1 |
| Mean Improvement (%) | 41.3 | 39.5 | ||||
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Pedersen, L.; Allan, M.; Utz, H.; Deans, M.; Bouyssounouse, X.; Choi, Y.; Flückiger, L.; Lee, S.Y.; To, V.; Loh, J.; et al. Tele-Operated Lunar Rover Navigation Using LiDAR. 2012. Available online: http://ntrs.nasa.gov/archive/nasa/casi.ntrs.nasa.gov/20120016849_2012017669.pdf (accessed on 15 June 2015). [Google Scholar]
- Clearpath Robotics Resources. Available online: http://www.clearpathrobotics.com/resourc es/brochures/ (accessed on 15 June 2015).
- Mandli Communication LiDAR: Advanced asset management and visualization. Available online: http://www.mandli.com/lidar/ (accessed on 15 June 2015).
- LiDAR USA ScanLook System Specification. Available online: http://lidarusa.com/images/ScanLookSpecification.pdf (accessed on 15 June 2015).
- VISATTM Van Mobile Mapping System. Available online: http://www.amsvisat.com/VVan/documents/vvan2006_letter_lowres.pdf (accessed on 15 June 2015).
- Glennie, C.; Brooks, B.; Ericksen, T.; Hauser, D.; Hudnut, K.; Foster, J.; Avery, J. Compact multipurpose mobile laser scanning system—Initial tests and results. Remote Sens. 2013, 5, 521–538. [Google Scholar] [CrossRef]
- Cho, K.; Baeg, S.; Park, S. Object tracking with enhanced data association using a 3D range sensor for an unmanned ground vehicle. J. Mech. Sci. Technol. 2014, 28, 4381–4388. [Google Scholar] [CrossRef]
- Koppanyi, Z.; Toth, C.K. Estimating aircraft heading based on laserscanner derived point clouds. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-3/W4, 95–102. [Google Scholar] [CrossRef]
- Muhammad, N.; Lacroix, S. Calibration of a rotating multi-beam LiDAR. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Toulouse, France, 18–22 October 2010; pp. 5648–5653.
- Atanacio-Jiménez, G.; González-Barbosa, J.-J.; Hurtado-Ramos, J.B.; Francisco, J.; Jiménez-Hernández, H.; García-Ramirez, T.; González-Barbosa, R. LiDAR Velodyne HDL-64E calibration using pattern planes. Int. J. Adv. Robot. Syst. 2011, 8, 70–82. [Google Scholar] [CrossRef]
- Glennie, C.; Lichti, D.D. Static calibration and analysis of the Velodyne HDL-64E S2 for high accuracy mobile scanning. Remote Sens. 2010, 2, 1610–1624. [Google Scholar] [CrossRef]
- Glennie, C.; Lichti, D.D. Temporal stability of the Velodyne HDL-64E S2 scanner for high accuracy scanning applications. Remote Sens. 2011, 3, 539–553. [Google Scholar] [CrossRef]
- Glennie, C. Calibration and kinematic analysis of the Velodyne HDL-64E S2 LiDAR sensor. Photogramm. Eng. Remote Sens. 2012, 78, 1–9. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Chien, H.-J. On-site sensor recalibration of a spinning multi-beam LiDAR system using automatically-detected planar targets. Sensors 2012, 12, 13736–13752. [Google Scholar] [CrossRef] [PubMed]
- Gordon, M.; Meidow, J. Calibration of a multi-beam laser system by using a TLS-generated reference. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, II-5/W2, 85–90. [Google Scholar] [CrossRef]
- Mirzaei, F.M.; Kottas, D.G.; Roumeliotis, S.I. 3D LiDAR-camera intrinsic and extrinsic calibration: Observability analysis and analytical least squares-based initialization. Int. J. Robot. Res. 2012, 31, 452–467. [Google Scholar] [CrossRef]
- Gong, X.; Lin, Y.; Liu, J. 3D LiDAR-camera extrinsic calibration using an arbitrary trihedron. Sensors 2013, 13, 1902–1918. [Google Scholar] [CrossRef] [PubMed]
- Park, Y.; Yun, S.; Won, C.S.; Cho, K.; Um, K.; Sim, S. Calibration between color camera and 3D LiDAR instruments with a polygonal planar board. Sensors 2014, 14, 5333–5353. [Google Scholar] [CrossRef] [PubMed]
- Velodyne HDL-32E User’s Manual. 2015. Available online: http://velodynelidar.com/lidar/products/manual/63-9113%20HDL-32E%20manual_Rev%20E_NOV2012.pdf (accessed on 11 May 2015).
- Chan, T.O.; Lichti, D.D.; Belton, D. A rigorous cylinder-based self-calibration approach for terrestrial laser scanners. ISPRS J. Photogramm. Remote Sens. 2015, 99, 84–99. [Google Scholar] [CrossRef]
- Brown, D.C. Close-range camera calibration. Photogramm. Eng. 1971, 37, 855–866. [Google Scholar]
- Lari, Z.; Habib, A. An adaptive approach for the segmentation and extraction of planar and linear/cylindrical features from laser scanning data. ISPRS J. Photogramm. Remote Sens. 2014, 93, 192–212. [Google Scholar] [CrossRef]
- Spinello, L.; Luber, M.; Arras, K.O. Tracking people in 3D using a bottom-up top-down detector. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 1304–1310.
- Shackleton, J.; Vanvoorst, B.; Hesch, J. Tracking people with a 360-degree LiDAR. In Proceedings of the Seventh IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Boston, MA, USA, 29 August–1 September 2010; pp. 420–426.
- Chan, T.O.; Lichti, D.D. Geometric modelling of octagonal lamp poles. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, XL-5, 45–150. [Google Scholar] [CrossRef]
- Skaloud, J.; Lichti, D.D. Rigorous approach to bore-sight self-calibration in airborne laser scanning. ISPRS J. Photogramm. Remote Sens. 2006, 61, 47–59. [Google Scholar] [CrossRef]
- Chan, T.O.; Lichti, D.D.; Glennie, C. Mutli-feature based boresight self-calibration of a terrestrial mobile mapping system. ISPRS J. Photogramm. Remote Sens. 2013, 82, 112–124. [Google Scholar] [CrossRef]
- Luo, D.; Wang, Y. Rapid extracting pillars by slicing point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, 37 Part B3, 215–218. [Google Scholar]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Pu, S.; Rutzinger, M.; Vosselman, G.; Oude Elberink, S.J. Recognizing basic structures from mobile laser scanning data for road inventory studies. ISPRS J. Photogramm. Remote Sens. 2011, 66, 28–39. [Google Scholar] [CrossRef]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef]
- Rabbani, T.; van den Heuvel, F.A. Efficient Hough transform for automatic detection of cylinders in point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2005, 36 Part 3/W19, 60–65. [Google Scholar]
- Ioannou, D.; Duda, W.; Laine, F. Circle recognition through a 2D Hough transform and radius histogramming. Image Vis. Comput. 1999, 17, 15–26. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chan, T.O.; Lichti, D.D. Automatic In Situ Calibration of a Spinning Beam LiDAR System in Static and Kinematic Modes. Remote Sens. 2015, 7, 10480-10500. https://doi.org/10.3390/rs70810480
Chan TO, Lichti DD. Automatic In Situ Calibration of a Spinning Beam LiDAR System in Static and Kinematic Modes. Remote Sensing. 2015; 7(8):10480-10500. https://doi.org/10.3390/rs70810480
Chicago/Turabian StyleChan, Ting On, and Derek D. Lichti. 2015. "Automatic In Situ Calibration of a Spinning Beam LiDAR System in Static and Kinematic Modes" Remote Sensing 7, no. 8: 10480-10500. https://doi.org/10.3390/rs70810480