3.1. Number of Specular Points inside the Scattering Area
The forward-scattering mechanisms of the GPS signals over the sea surface are still a matter of investigation. Despite many models having been studied, including the small slope approximation (SSA) model [
25] and the two-scale composite model (TSM) [
26], in the case of the GNSS-R, the geometrics optics limit of the Kirchhoff model (KGO) is the one most widely used [
4,
8,
27,
28] because of its simplicity and its capability to reproduce the cross-polar experimental data in the forward direction. The scattering of electromagnetic waves from the sea is strongly affected by its roughness, being the total scattered field the combination of many electromagnetic waves coming from multiple individual scatterers on the surface. In this situation, quasi-specular reflections dominate, since, according to the TSM, this type of scattering is produced mostly by the large-scale components of the surface.
This experiment focus on the evaluation of the scattering due to the small scale (roughness scales with associated wavenumbers higher than the cutoff wavenumber (
Table 1)) of the water surface. To analyze the results obtained in this experiment, the shape of the water height is studied to assess the occurrence of specular points. The water surface is partitioned into 90,000 smaller surface patches equal to the number of coherent integration times (
= 20 ms) during each dataset (the length of each dataset is 30 min). The scattering field during each shot is given by [
29]:
where
is the time,
is the number of specular points around the nominal one,
is the amplitude (ruled by the local curvature of the water surface in the specular point [
29]),
is the imaginary unit and
is the phase defined as [
29]:
where
is the angular speed of the carrier,
is the Doppler shift of the i-th specular point,
is the carrier wavenumber and
is the range between the i-th specular point and the scattering cell center.
is related to the ranges from the transmitter to the i-th specular point and from it to the receiver through the variable
. Finally,
is a deterministic, range-dependent term defined in [
29] with
being the projection in the horizontal plane of the positioning vector of the scattering cell center.
For specular points inside a scattering cell,
can be assumed to be constant and equal to the corresponding value at the center of the scattering cell. The variations in the signals phase due to the variations in Doppler and position of the specular points around the nominal one can be modelled as a stochastic process [
29].
The scattered field in the specular direction is composed of a coherent component and a random Hoyt-distributed incoherent component [
30] (p. 126). The first one comes from the coherent combination of the scattering on the individual facets within the first Fresnel zone. The incoherent component is the result of the random combination of electromagnetic waves coming from other scatterers within the glistening zone that add together at the receiving antenna. It is also shown [
30] (p. 150) that in directions different from the specular one, the scattering is always incoherent.
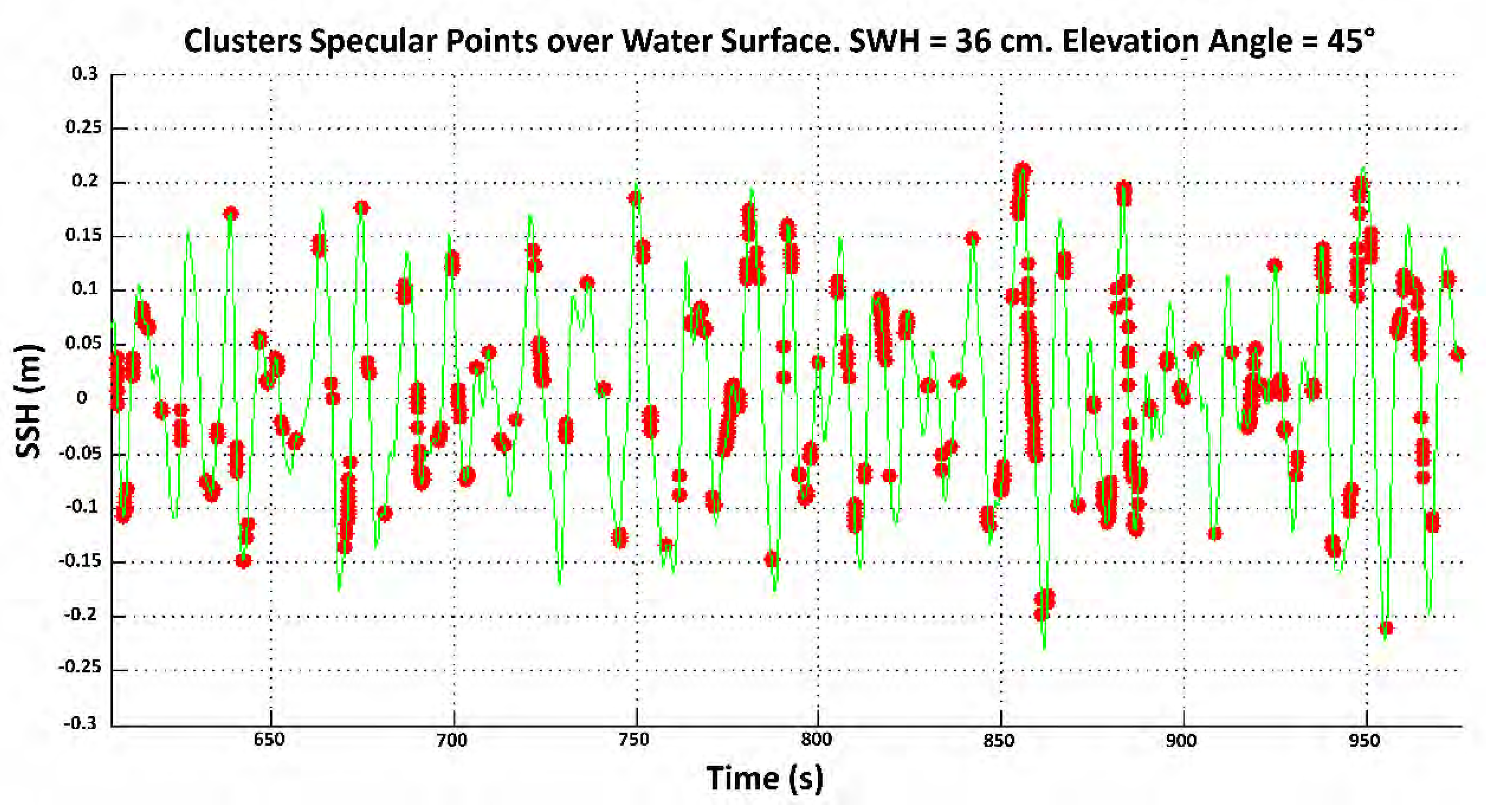
The specular points are identified continuously every 20 ms over the spatial (to transform the temporal domain into spatial surface profile, a celerity value of 1.6 m/s was used, since this was the only data available from the wave probe) surface profile when the local incident (
) and the scattered (
) angles are the same. The distribution of the specular points is not uniform, being characterized by different clusters (
Figure 5). This experimental result shows the micro-Doppler phenomenon [
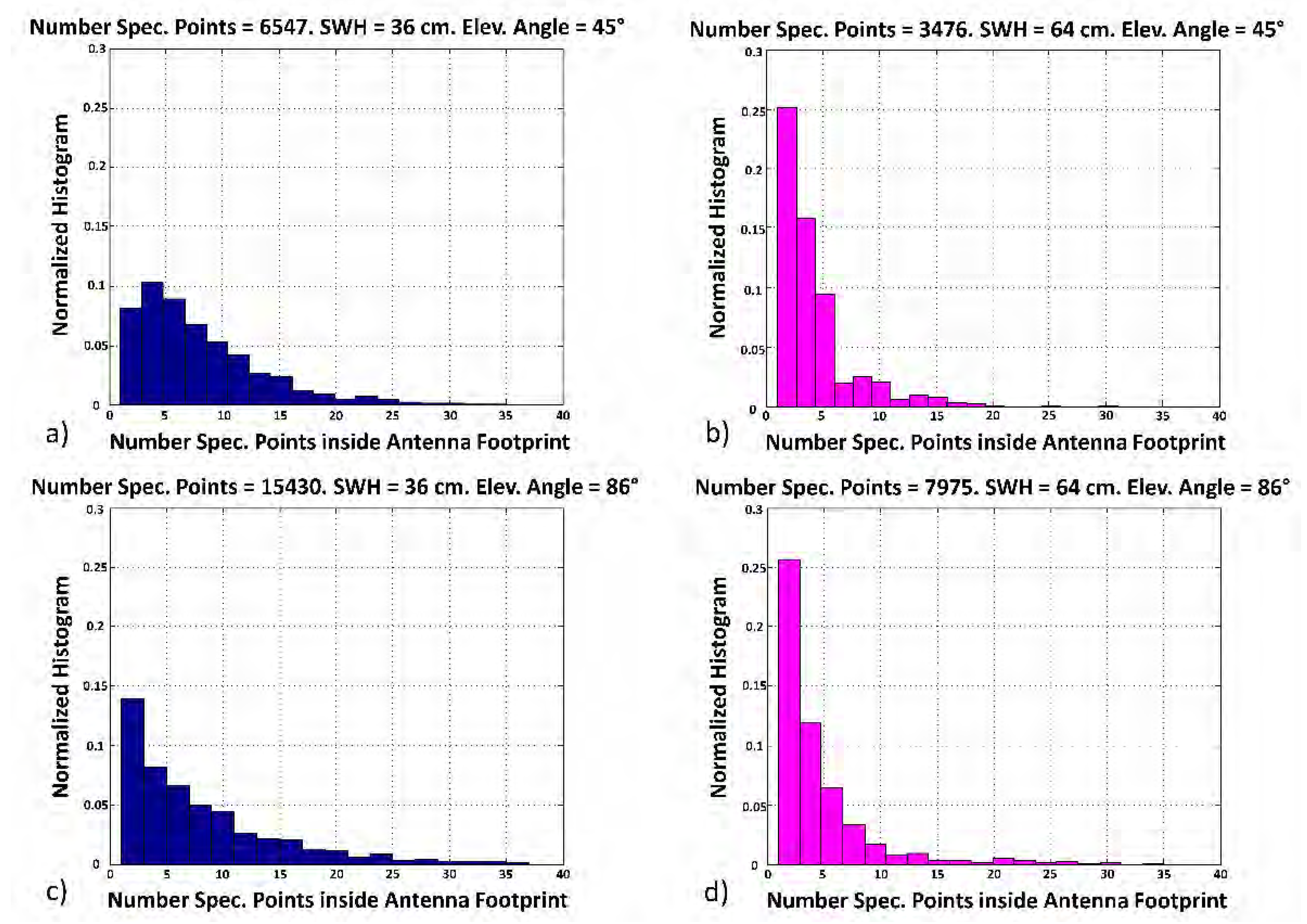
31] due to the small oscillations of the surface roughness. The normalized histograms of the number of specular points inside the antenna footprint every 20 ms are shown in
Figure 6a–d for SWH = 36 cm and
= 45°, SWH = 64 cm and
= 45°, SWH = 36 cm and
= 86°, SWH = 64 cm and
= 86°, respectively. The number of clusters with a high number of specular points is larger for lower SWH. Additionally, it is derived that the total number of specular points is larger for lower SWH and for larger elevation angles. Local diffraction effects [
26] contribute to the time-continuous uninterrupted ‘sea’ surface height (SSH) measurements provided by the PYCARO reflectometer (
Figure 7).
Figure 5.
Clusters of specular points distributed over the water surface profile as computed using the temporal series of data provided from the HR Wallingford wave probe monitor for a SWH = 36 cm and = 45°. SSH, sea surface height.
Figure 5.
Clusters of specular points distributed over the water surface profile as computed using the temporal series of data provided from the HR Wallingford wave probe monitor for a SWH = 36 cm and = 45°. SSH, sea surface height.
Figure 6.
Specular points distribution computed using the temporal series of data provided from the HR Wallingford wave probe monitor for a: (a) SWH = 36 cm and = 45°; (b) SWH = 64 cm = 45°; (c) SWH = 36 cm and = 86°; and (d) SWH = 64 cm and = 86°.
Figure 6.
Specular points distribution computed using the temporal series of data provided from the HR Wallingford wave probe monitor for a: (a) SWH = 36 cm and = 45°; (b) SWH = 64 cm = 45°; (c) SWH = 36 cm and = 86°; and (d) SWH = 64 cm and = 86°.
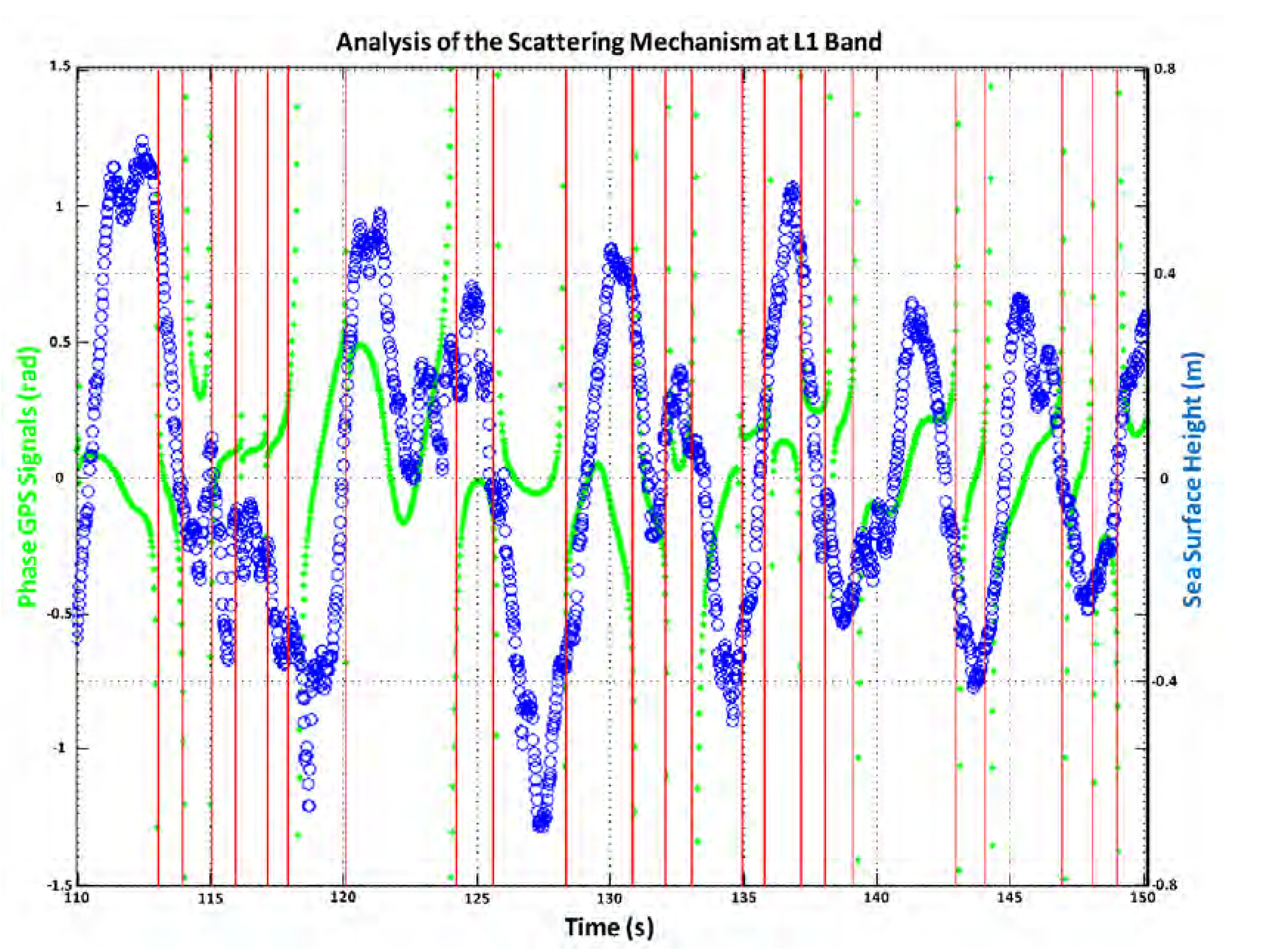
Figure 7.
Analysis of the electromagnetic interaction of the GPS signals and the scattering surface in a bistatic scenario. The phase (after retracking) distribution of the scattered field is time- and space-located over the temporal evolution of the SSH as measured by the PYCARO reflectometer. This analysis has been performed with a SWH = 36 cm and an elevation angle of = 86°.
Figure 7.
Analysis of the electromagnetic interaction of the GPS signals and the scattering surface in a bistatic scenario. The phase (after retracking) distribution of the scattered field is time- and space-located over the temporal evolution of the SSH as measured by the PYCARO reflectometer. This analysis has been performed with a SWH = 36 cm and an elevation angle of = 86°.
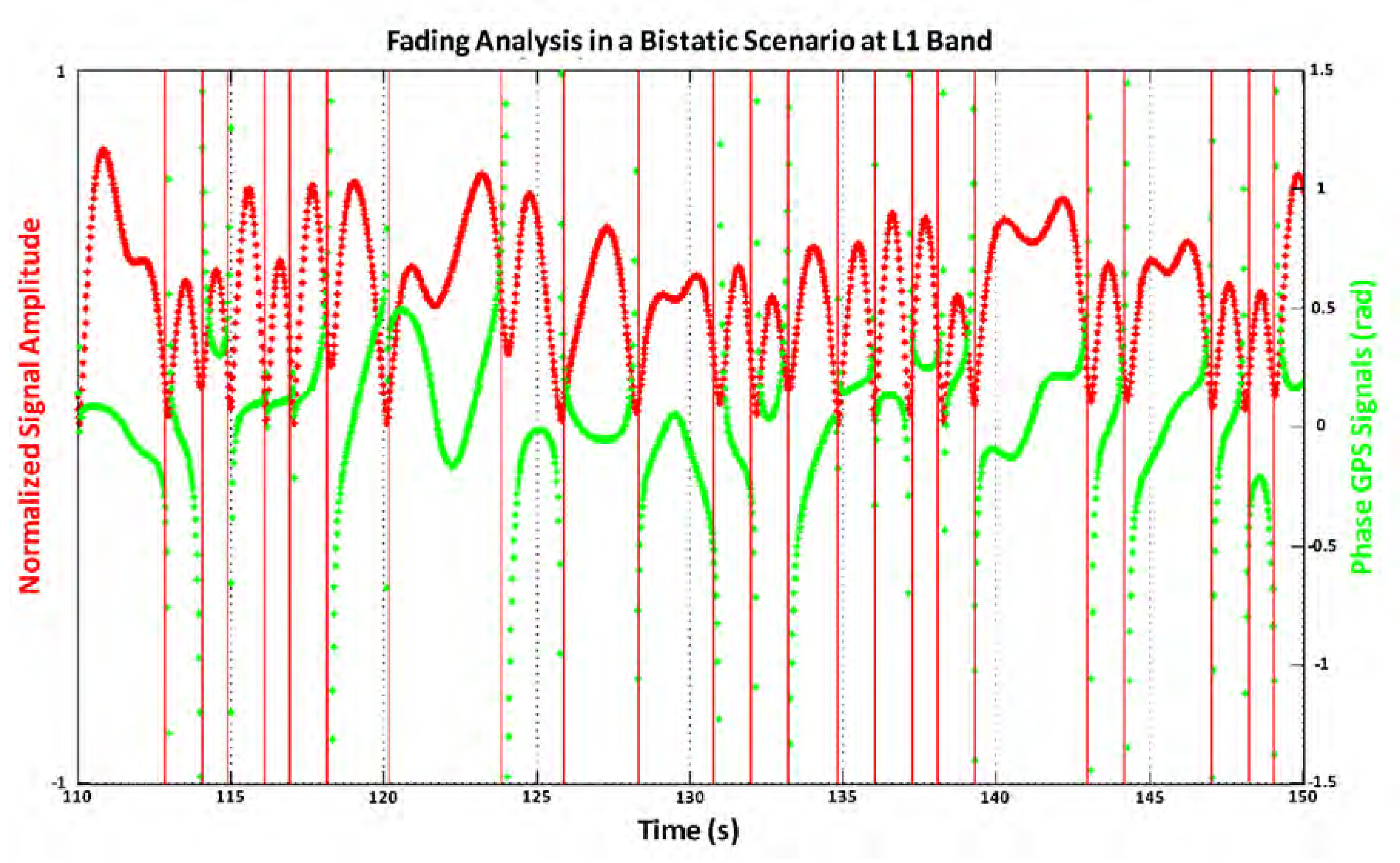
Figure 7 shows the SSH as measured by PYCARO for a SWH = 36 cm and
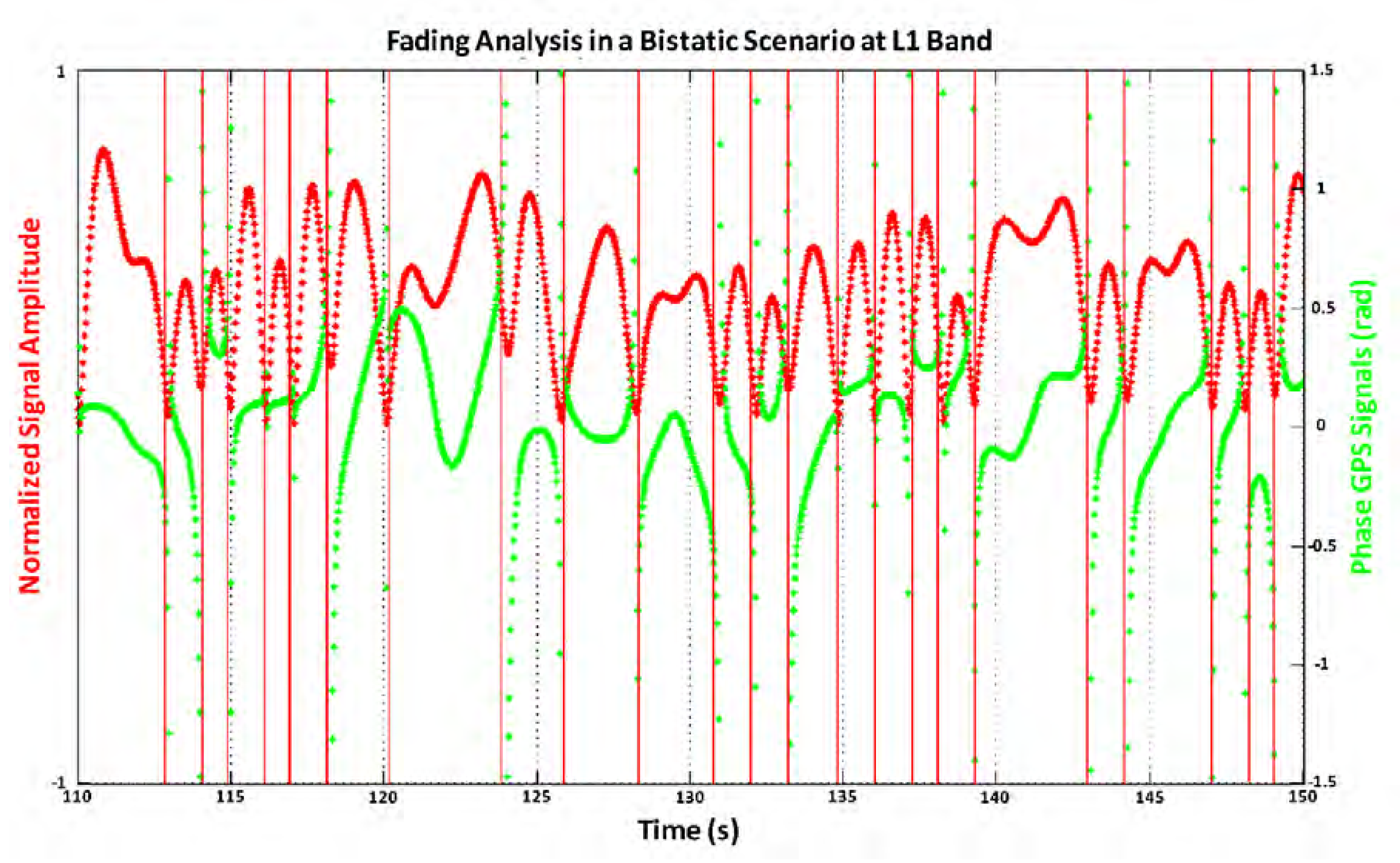
= 86°. The total phase is important, but here, we are inferring surface deviations from phase changes only of the waveform peak. Any contribution (secondary specular points) away from the nominal one adds power at the trailing edge of the waveform, although very close to the main peak due to the short differential delay. This process distorts the waveform, and the peak becomes rounder. The one-sigma rms of the altimetric information is ~1 cm. Note that the sign of the phase of the received GPS signals (after retracking) changes at the wave valleys and crests, that is when the surface starts “approaching” the receiver or it starts “moving away” from it. These changes in the phase of the signals after being retracked are related to the relative velocity of the target with respect to the receiver (induced Doppler frequency shift). Some of these changes are associated with the larger waves, but others with smaller waves that also produce changes in the relative velocity of the specular points with respect to PYCARO. Each specular point has a different relative phase, which contributes to the speckle noise, responsible for the power fluctuations in the reflected signals (see the vertical red lines in
Figure 8).
Figure 8.
Normalized reflected signal power amplitude fluctuations due to the phase (after retracking) changes induced by the scattering surface. This analysis has been performed with a SWH = 36 cm and an elevation angle of = 86°.
Figure 8.
Normalized reflected signal power amplitude fluctuations due to the phase (after retracking) changes induced by the scattering surface. This analysis has been performed with a SWH = 36 cm and an elevation angle of = 86°.
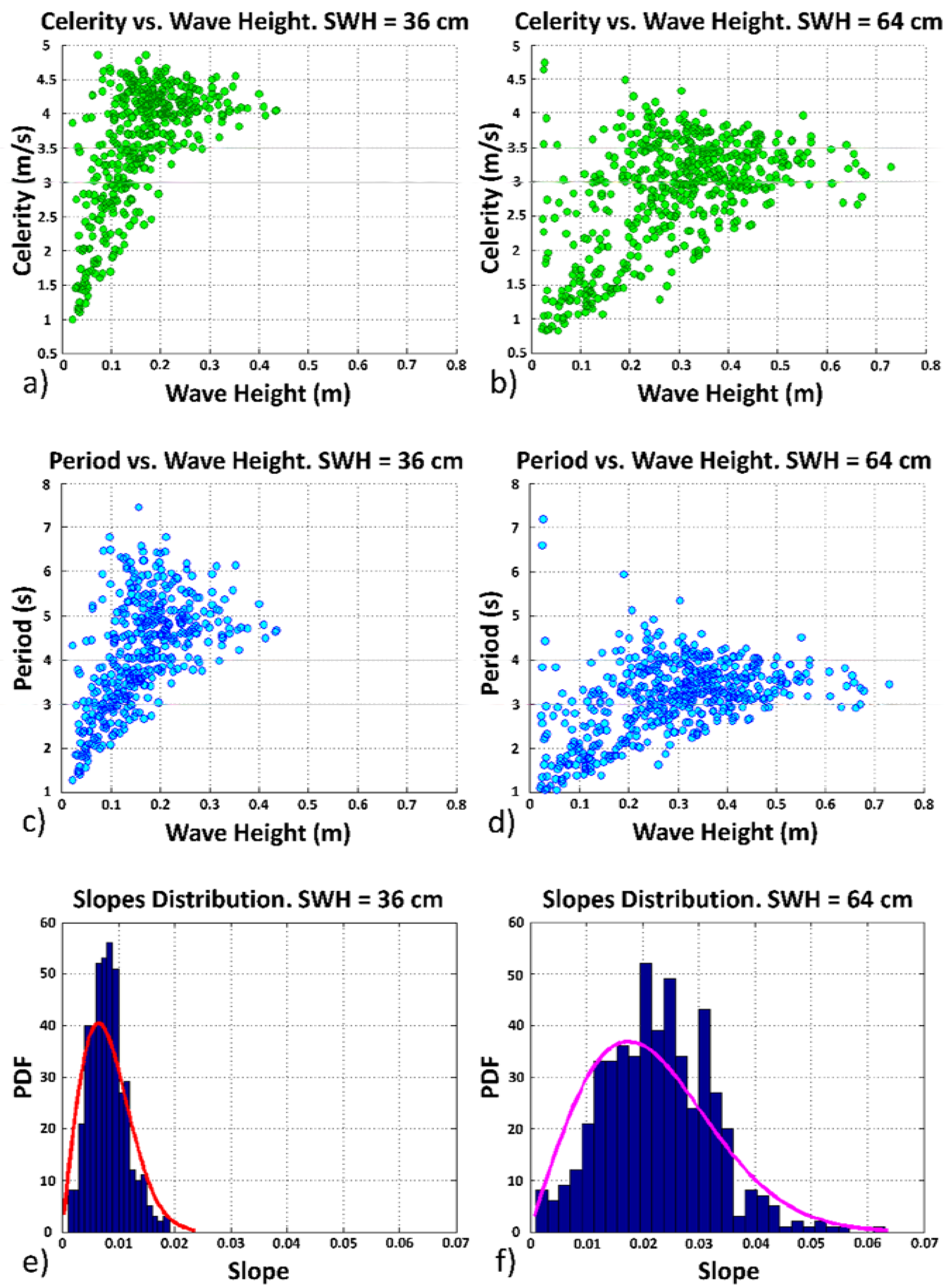
The number of scatterers
is related to the sea surface motion through the appearance and disappearance of specular points [
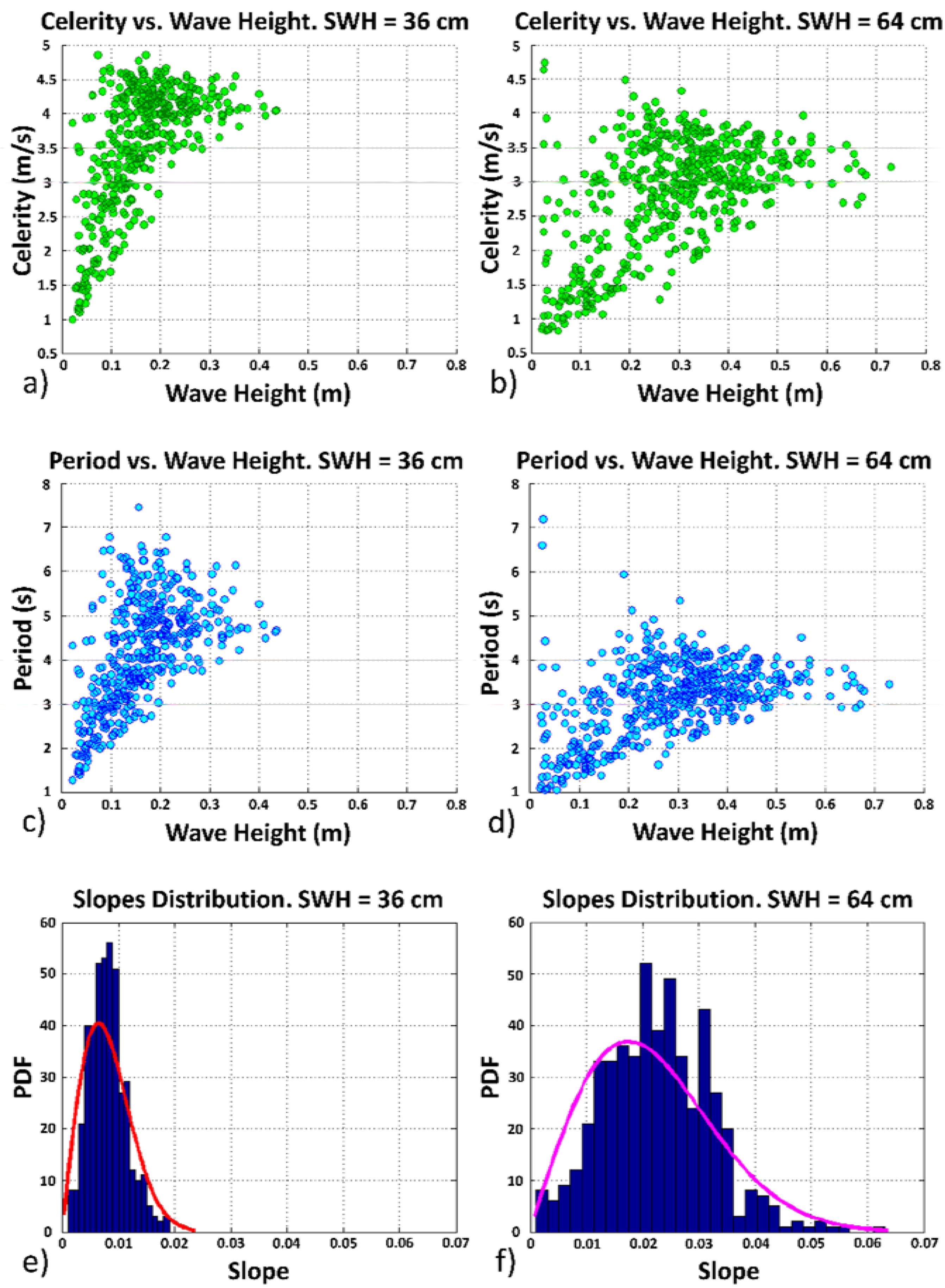
32]. In the CIEM experiment, this process was mostly due to the travel of the water waves. During a wave period, some specular points moved outside the antenna footprint, and others moved inside from a neighboring footprint. The maximum measured value of the slopes was 0.02 and 0.06, for a SWH = 36 cm and for a SWH = 64 cm, respectively (
Figure 4e,f). The waves were identified using the so-called zero-down-crossing method [
33], which includes the celerities in the computation of the slopes (the horizontal scale threshold of the slopes’ pdf was ~1.7 m). The region on the surface that contributed in-phase to the reflected signal was actually a smaller region (scattering cell) than the first Fresnel zone, larger for higher values of SWH (
Table 1). Larger SWH values led to larger scattering cell over the water surface.
3.2. Water Surface Height Measurements
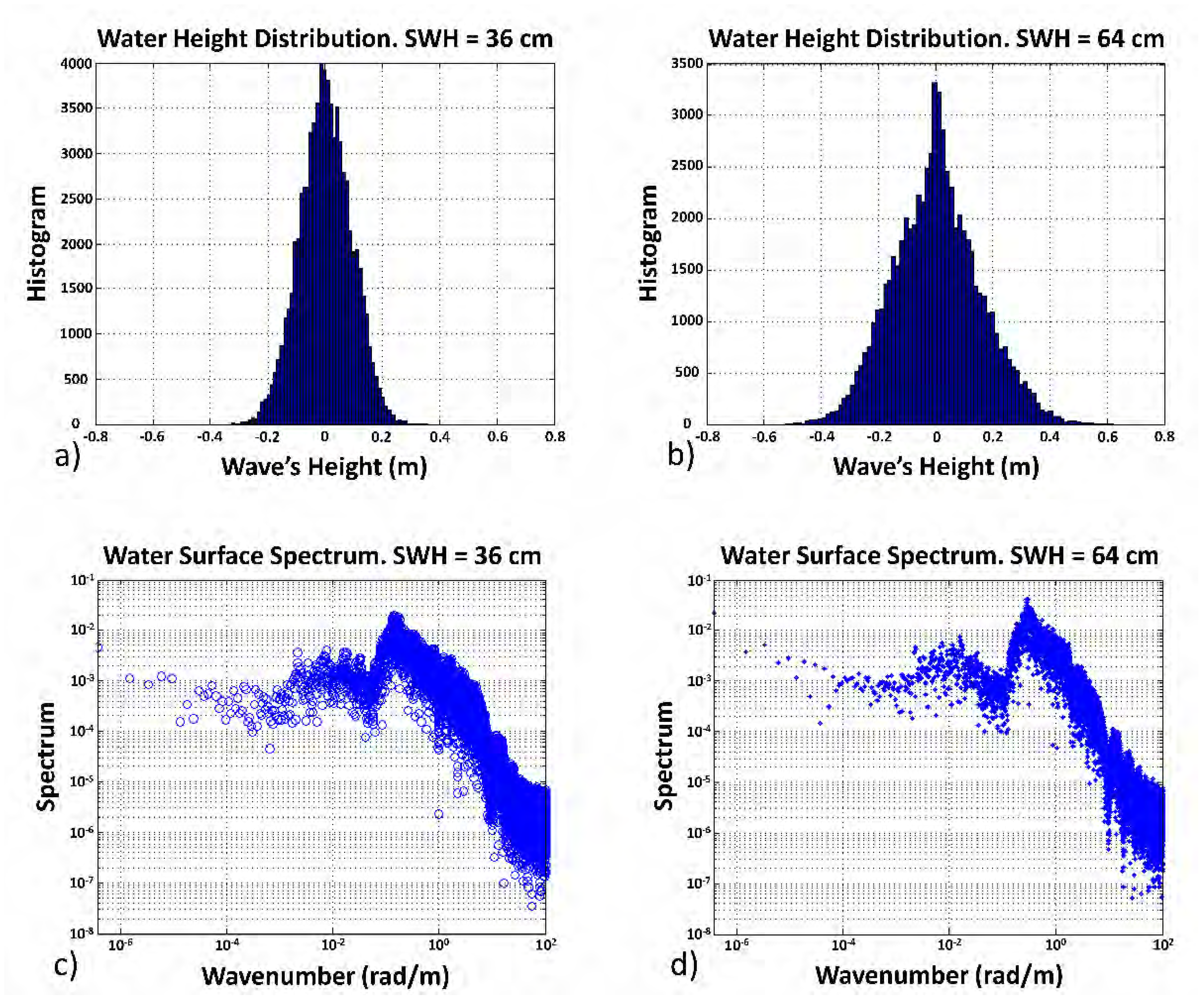
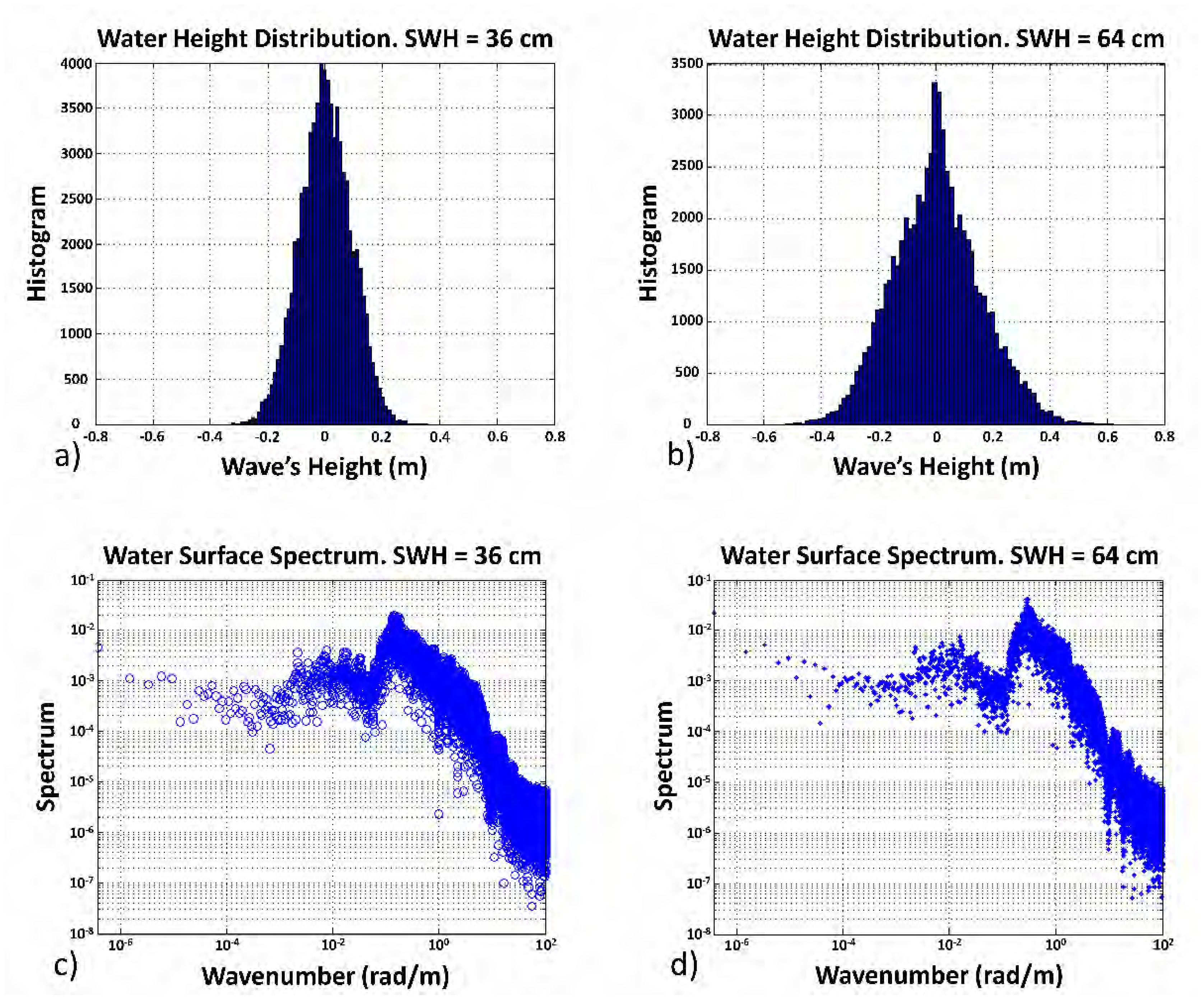
The performance of the PYCARO instrument has been evaluated for low-altitude applications (e.g., coastal applications). The experiment and the dataset generation were performed in a controlled manner. The height distributions of the two surface states obtained using the HR Wallingford wave probe are represented in
Figure 9a,b. Their corresponding water surface spectra were derived from the time series provided by this sensor (
Figure 9c,d).
Figure 9.
Surface height distributions obtained using the HR Wallingford wave probe monitor for a: (a) SWH = 36 cm and (b) SWH = 64 cm. Corresponding wave surface spectra for a: (c) SWH = 36 cm and (d) SWH = 64 cm at the CIEM.
Figure 9.
Surface height distributions obtained using the HR Wallingford wave probe monitor for a: (a) SWH = 36 cm and (b) SWH = 64 cm. Corresponding wave surface spectra for a: (c) SWH = 36 cm and (d) SWH = 64 cm at the CIEM.
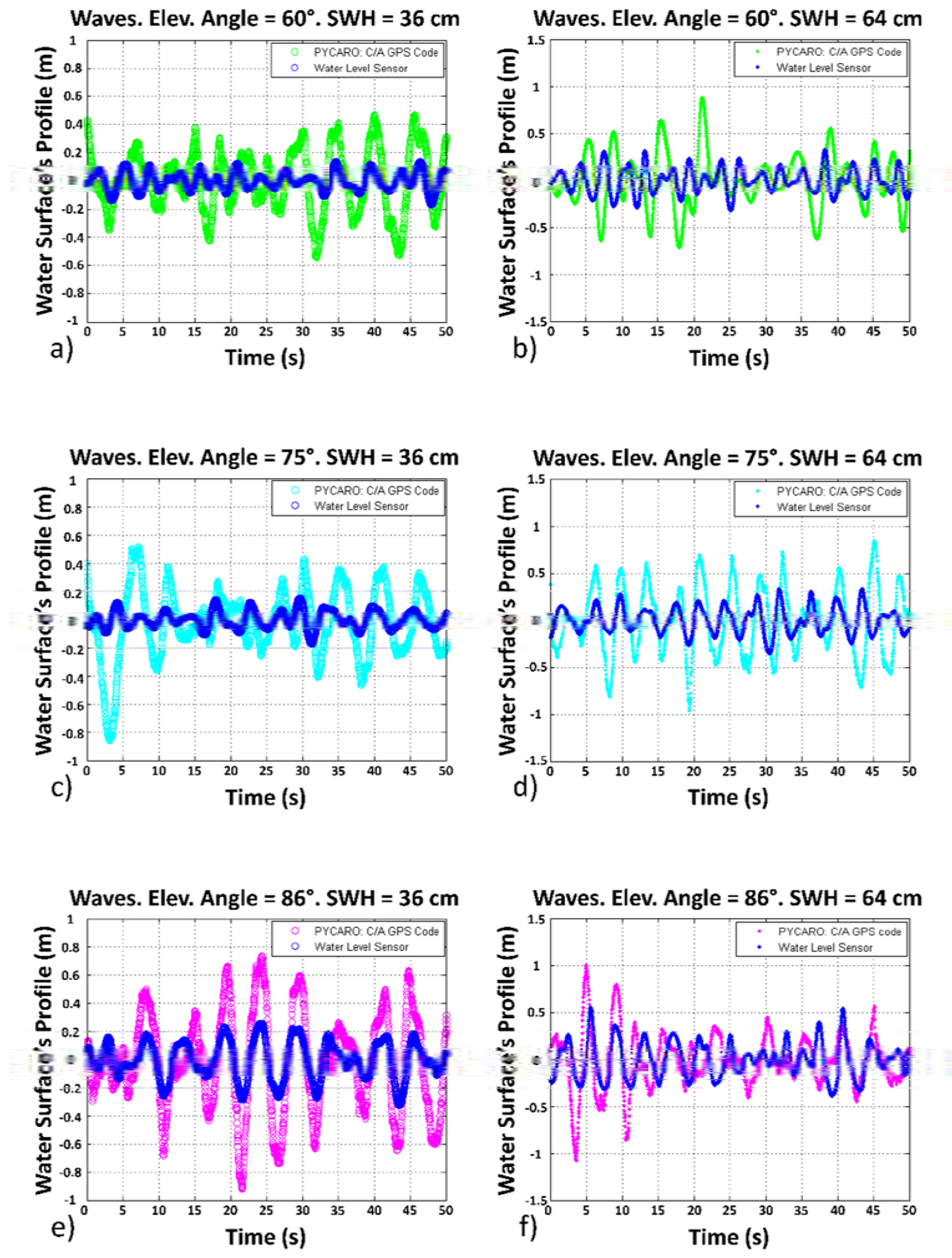
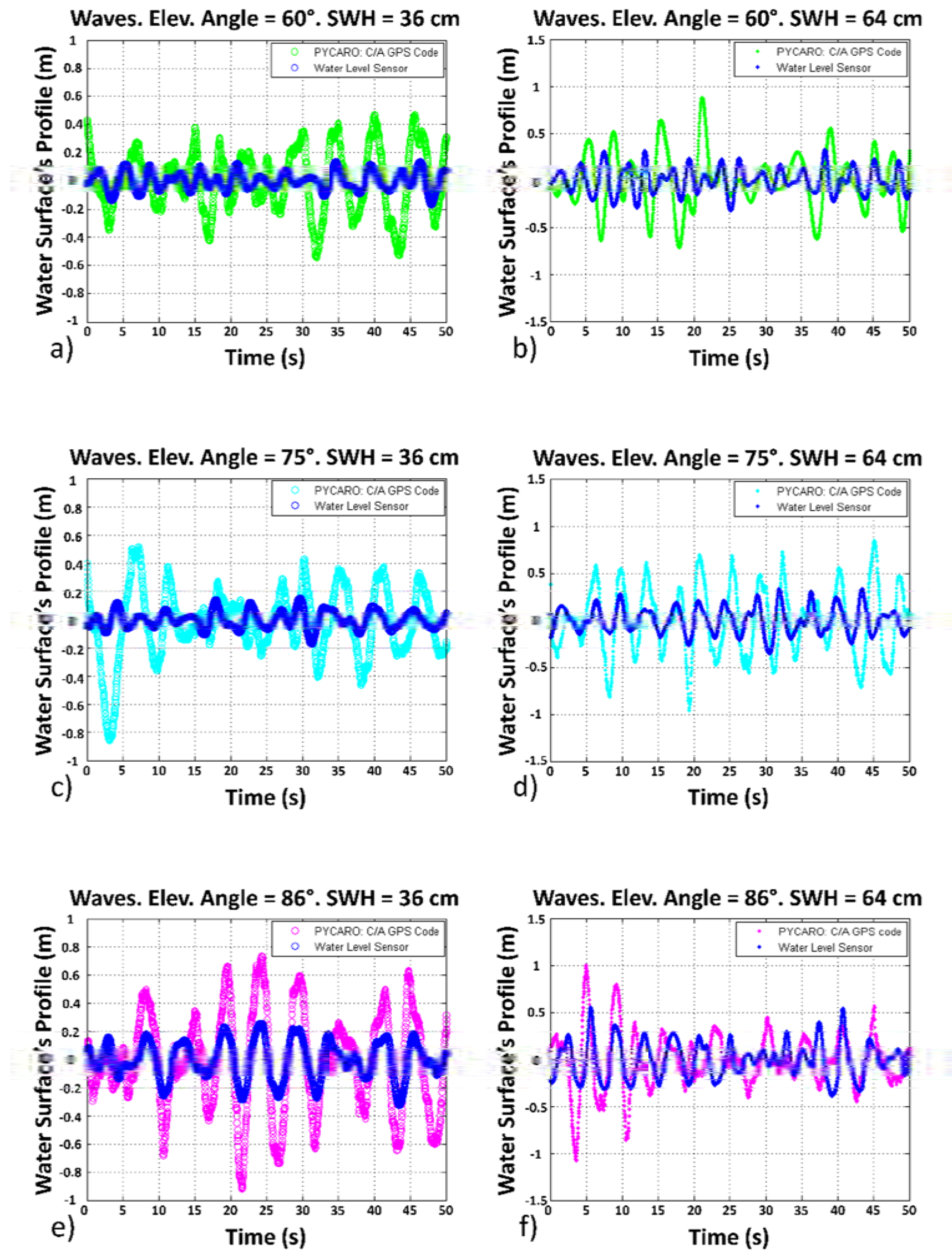
As a first step, the scattering in the time domain for different water surface states and transmitter elevation angles is analyzed. The instantaneous SSH relative to the mean water level in the channel as measured by the water level sensor and that derived using PYCARO (from the C/A code) are presented in
Figure 10a,c,e for a SWH = 36 cm, and in
Figure 10b,d,f for a SWH = 64 cm, respectively, for different elevation angles:
= 60°, 75° and 86°.
The curve defined by the evolution in time of the geometric ranges (after scattering over the water surface) between the “GPS satellite” (transmitter) and the PYCARO instrument (receiver) was detrended to obtain the SSH. As can be seen, the wave profile as measured by the level sensor (
Figure 10) is correlated with the one derived from PYCARO’s observables obtained from the C/A code. (However, the amplitude estimated from PYCARO [
14] is larger than that from the gauges. A similar behavior was observed in a field experiment over the Mediterranean Sea using the GPS C/A code, but not with the GPS P(Y) code [
14].)
Figure 10.
For an elevation angle of (a,b) = 60°, (c,d) = 75° and (e,f) = 86°, (a,c,e) sample wave profile as measured by PYCARO using the GPS C/A code and by the water level sensor for a SWH = 36 cm and (b,d,f) for SWH = 64 cm.
Figure 10.
For an elevation angle of (a,b) = 60°, (c,d) = 75° and (e,f) = 86°, (a,c,e) sample wave profile as measured by PYCARO using the GPS C/A code and by the water level sensor for a SWH = 36 cm and (b,d,f) for SWH = 64 cm.
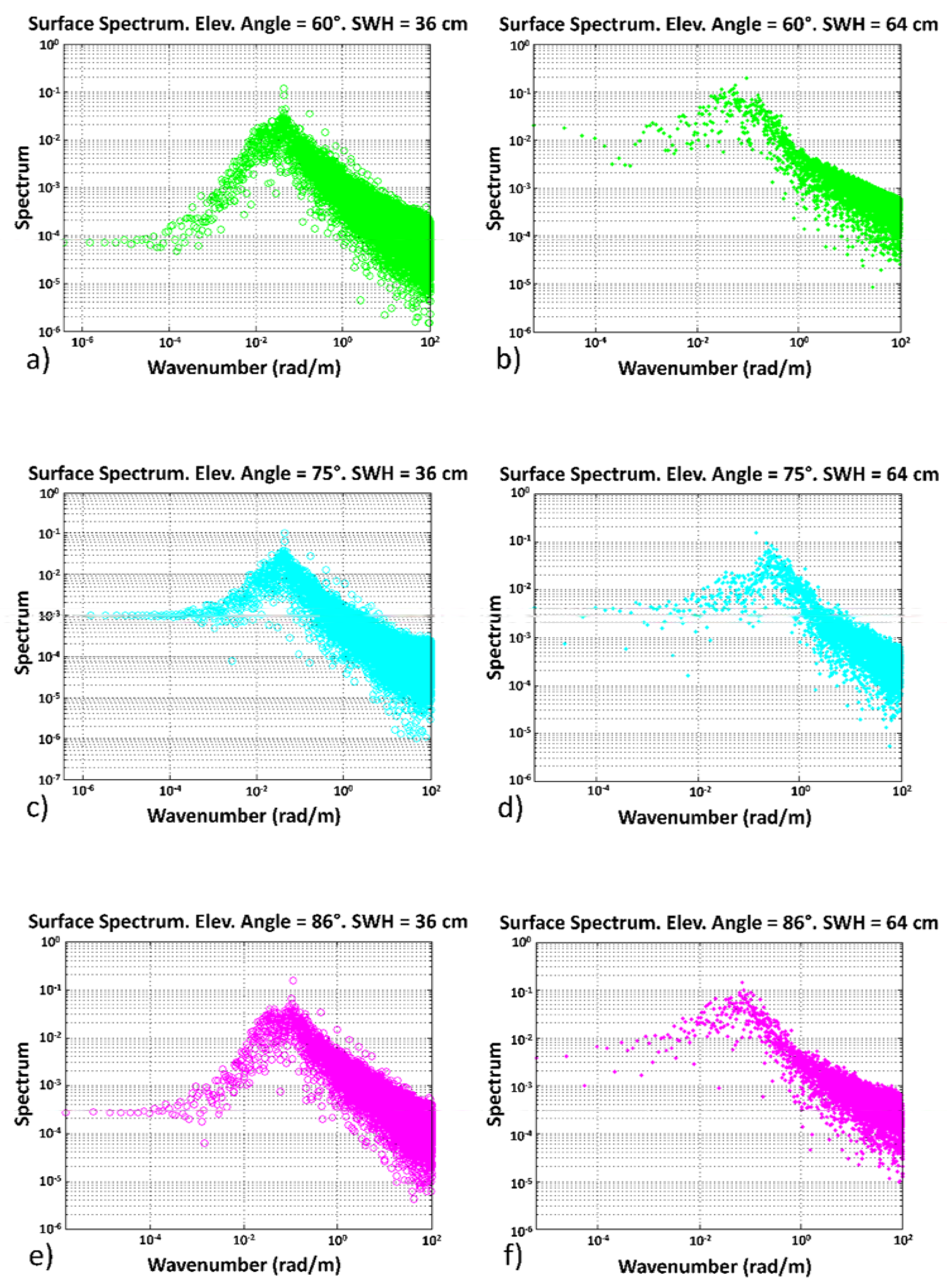
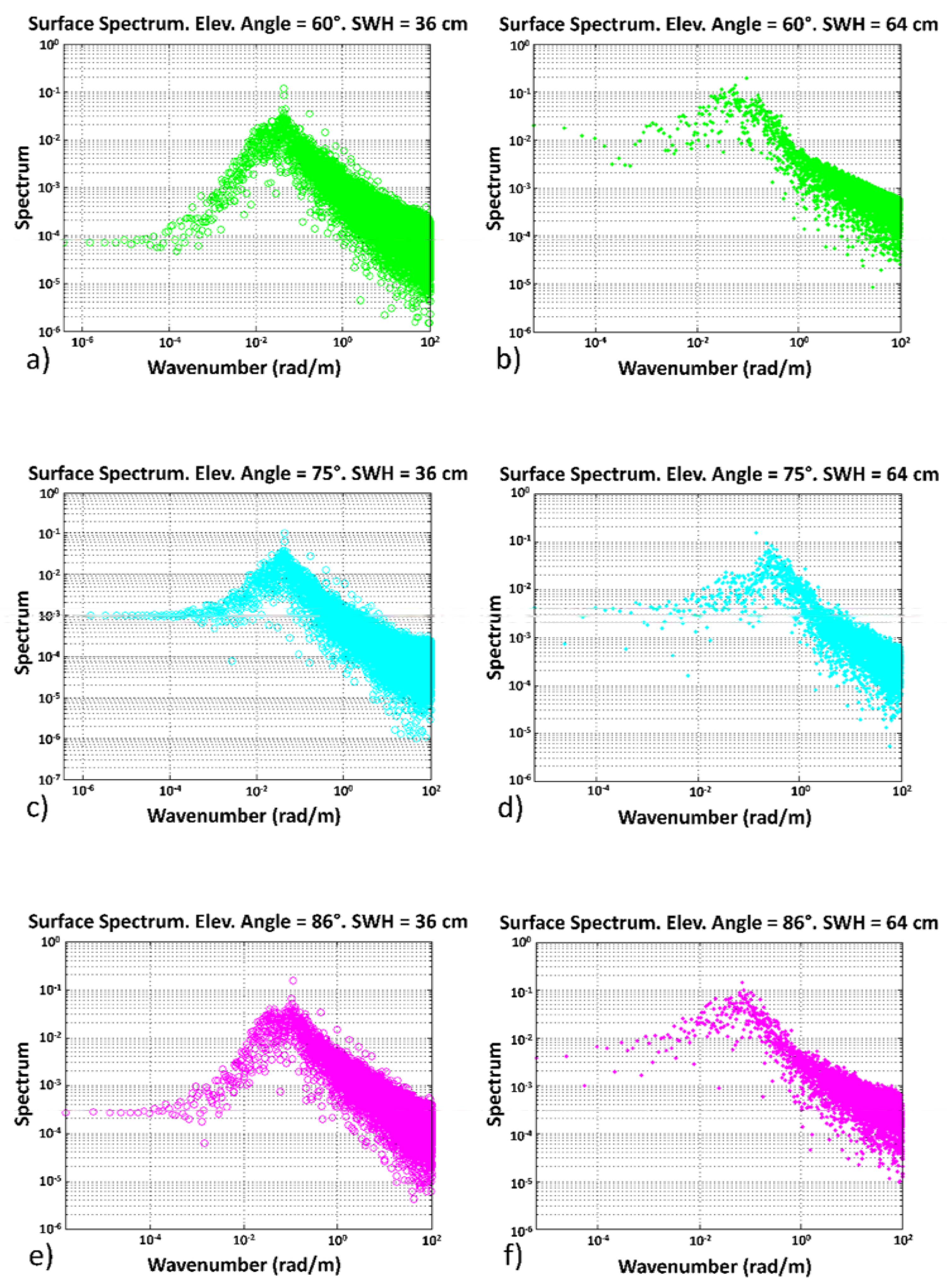
Additionally, the water surface’s spectra computed for the different surface states as measured by PYCARO for the different elevation angles (
= 60°, 75° and 86°) are represented in
Figure 11a,c,e and
Figure 11b,d,f respectively, for a SWH = 36 cm and 64 cm. The Pearson’s linear correlation coefficients of the level gauge sensor and the bistatically-derived results are 0.78, 0.85 and 0.81 for a SWH = 36 cm and 0.34, 0.74 and 0.72 for a SWH = 64 cm,
= 60°, 75° and 86°.
Figure 11.
For an elevation angle of (a,b) = 60°, (c,d) = 75° and (e,f) = 86°, (a,c,e) water surface spectra as measured by PYCARO using the GPS C/A code for SWH = 36 cm and (b,d,f) for SWH = 64 cm.
Figure 11.
For an elevation angle of (a,b) = 60°, (c,d) = 75° and (e,f) = 86°, (a,c,e) water surface spectra as measured by PYCARO using the GPS C/A code for SWH = 36 cm and (b,d,f) for SWH = 64 cm.
3.3. Analysis of the Coherent and Incoherent Components after Retracking
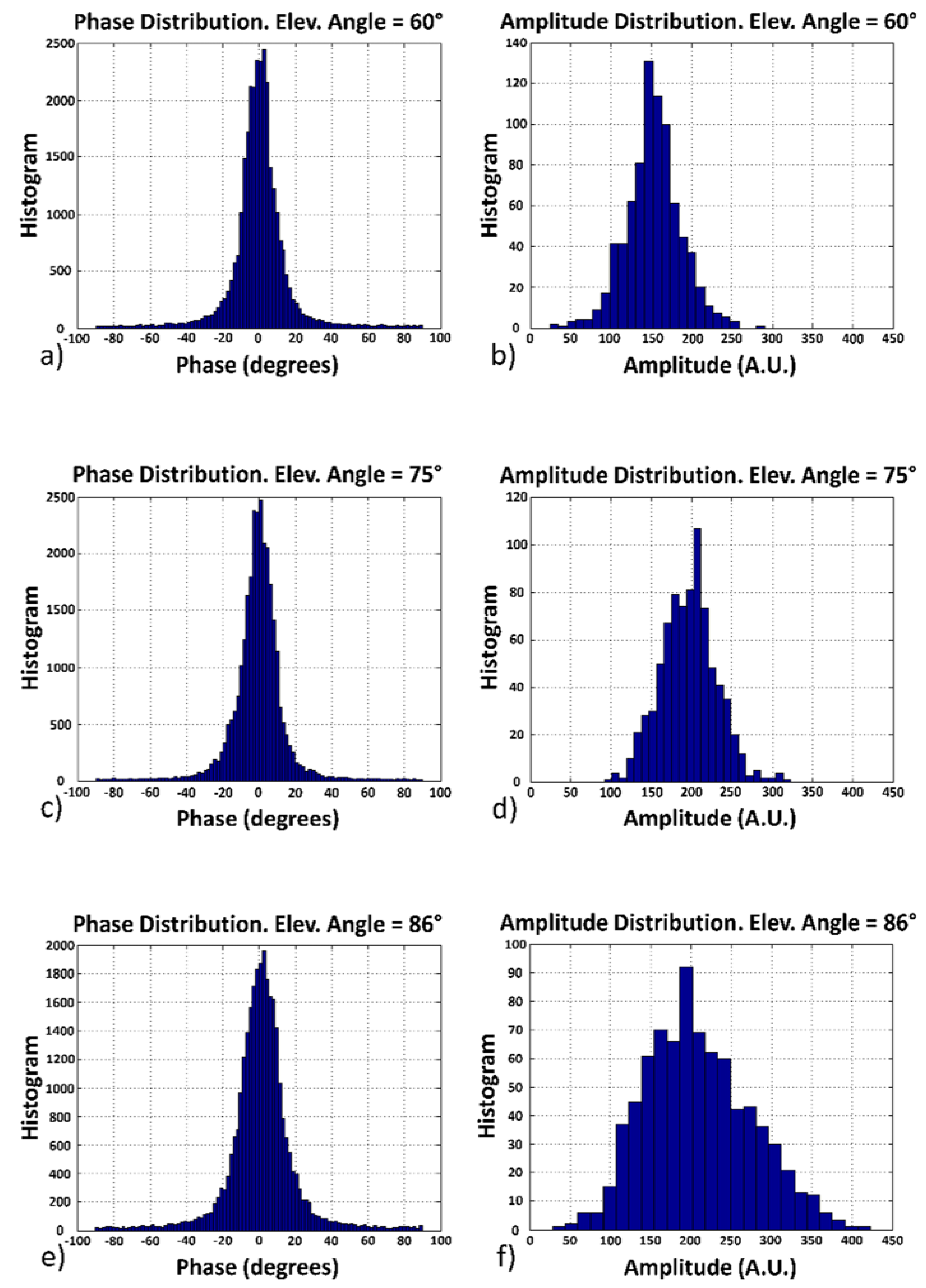
The phase of the signals after complex cross-correlation with the locally-generated C/A code and after retracking (
Figure 12a,c,e) for different elevation angles (
= 60°, 75° and 86°) and for a SWH = 36 cm is studied in this section. The retracking algorithm implemented in the PYCARO reflectometer tends to align the sum of the I and Q components of the scattered field with the I axis and switches 180° during each data bit reversal. The GPS satellites’ motion (and eventually, the receiver’s motion, as well) induces a change in the delay and the phase difference of the waveforms that needs to be compensated for the coherent and incoherent averaging.
Figure 12.
At an elevation angle of (a,b) = 60°, (c,d) = 75° and (e,f) = 86°, (a,c,e) histogram of the phase and (b,d,f) amplitude of the signals after retracking for a SWH = 36 cm.
Figure 12.
At an elevation angle of (a,b) = 60°, (c,d) = 75° and (e,f) = 86°, (a,c,e) histogram of the phase and (b,d,f) amplitude of the signals after retracking for a SWH = 36 cm.
The length of the dataset is 30 min, sampled at 10 Hz, showing that the random complex vectors add up together, privileging a certain direction in the complex plane (
Figure 12a,c,e). As can be appreciated, the phase’s standard deviation of the retracked signals is actually quite small, which shows a strong coherent component being tracked. As the elevation angle increases from
= 60° − 86°, the phase standard deviation increases also from 13.4° to 19.1° (
Figure 12a,c,e and
Table 2), and the kurtosis decreases from 17.5 to 8.5 (
Table 2). This is a clear indication that the amount of incoherent scattering increases (the pdf becomes more like a Gaussian one), due to the larger contribution of the wave crests and valleys at larger elevation angles. This is also in agreement with the evolution of the amplitude distribution, which tends to a Rayleigh distribution, as the elevation angle increases (
Figure 12b,d,f and
Table 3).
Table 2.
Statistical analysis of the phase (after retracking) distribution of the scattered GPS signals over the CIEM wave channel at different elevation angles: = 60°, 75° and 86°.
Table 2.
Statistical analysis of the phase (after retracking) distribution of the scattered GPS signals over the CIEM wave channel at different elevation angles: = 60°, 75° and 86°.
| (Degrees) | 60° | 75° | 86° |
|---|
| Phase SD (Degrees) | 13.4° | 17.4° | 19.1° |
| Phase Mean (Degrees) | 0.9° | −0.5° | 1.2° |
| Phase Kurtosis | 17.5 | 10.4 | 8.5 |
| Phase Skewness | 0.9 | −0.06 | −0.05 |
Table 3.
Statistical analysis of the amplitude (after retracking) distribution of the scattered GPS signals over the CIEM wave channel at different elevation angles: = 60°, 75° and 86°.
Table 3.
Statistical analysis of the amplitude (after retracking) distribution of the scattered GPS signals over the CIEM wave channel at different elevation angles: = 60°, 75° and 86°.
| (Degrees) | 60° | 75° | 86° |
|---|
| Amplitude SD (A.U.) | 34 | 37 | 65 |
| Amplitude Mean (A.U.) | 152 | 195 | 209 |
| Amplitude Kurtosis | 3.91 | 3.44 | 2.74 |
| Amplitude Skewness | −0.013 | 0.05 | 0.324 |
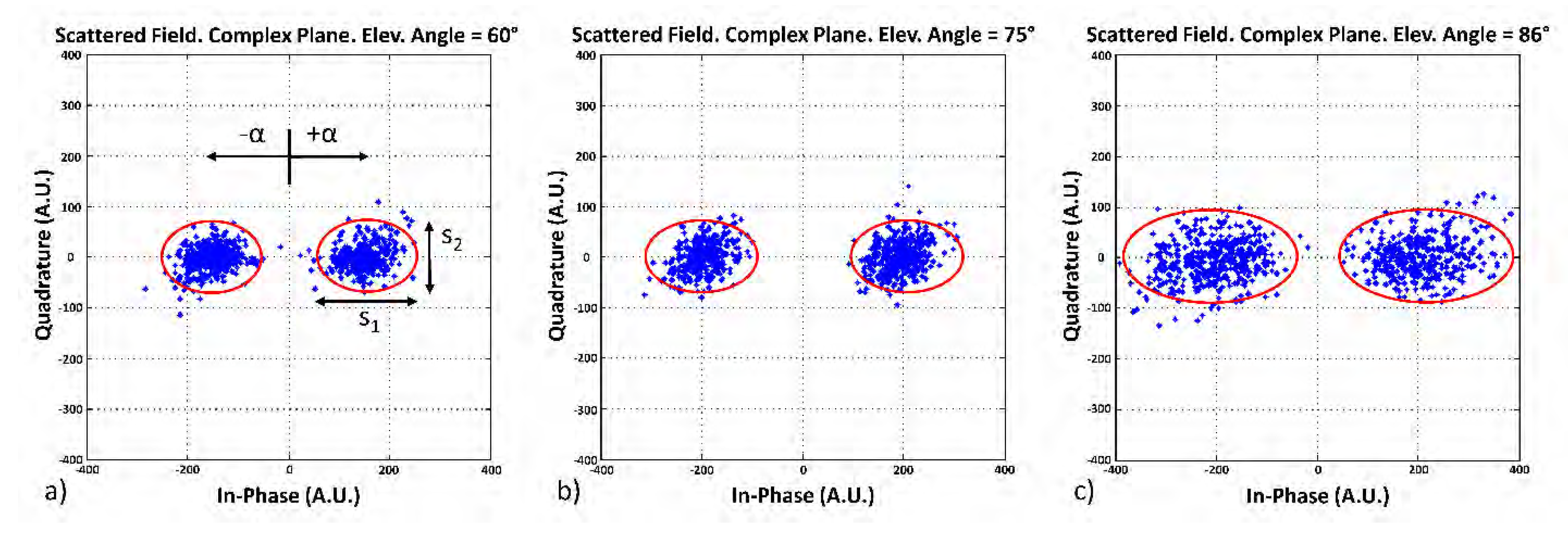
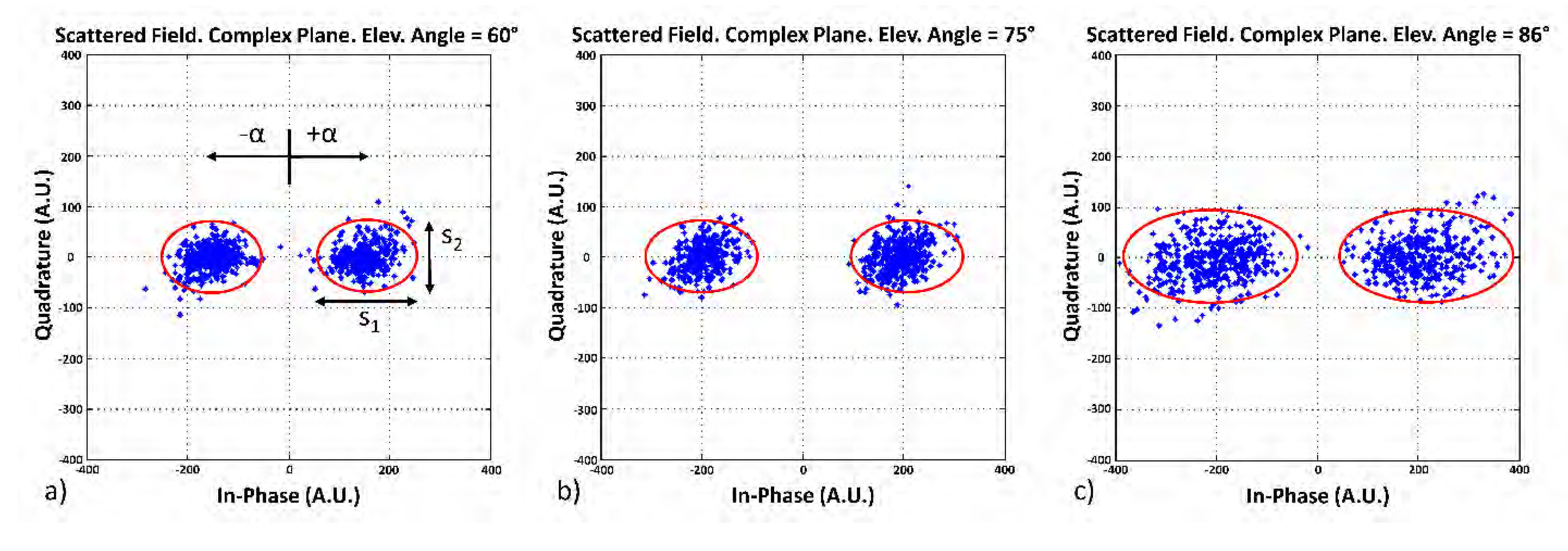
The ratio of the coherent-to-incoherent components as seen by the PYCARO instrument is derived using the total scattered field complex plane representation (
Figure 13). Each single measurement of the scattered complex field during the 30 min is represented. For a completely incoherent scattering, the distribution in the complex plane of the scattered field should theoretically follow a zero-mean two-dimensional Gaussian distribution with variances
and
[
30] (p. 125). However, experimental results (
Figure 13a–c) show that after retracking, the total scattered field is displaced from the center by a certain value ±
in the real axis (equal to the mean of the amplitude distribution) into two regions with an ellipsoidal shape, which proves the presence of a strong coherent component in the specular direction. As explained before, the phase changes (
Figure 13a–c) are due to changes of the navigation bit sign and the effect of the speckle noise. Thus, there are two regions displaced ±
from the center. The relative weight of the coherent-to-incoherent components is quantified by the
parameter [
30] (p. 126):
Note that
tends to ∞ for a totally coherent field (
0) and it is equal to zero for a totally incoherent field (
= 0). The results from this experiment show that the weight of the coherent component (
) reduces by ~6% (from 0.97 to 0.95) when the elevation angle increases from
= 60° − 86° (
Table 4), while the incoherent scattering increases as the surface roughness increases, in agreement with the reduction of the asymmetry factor
(
Table 4). At the same time, the larger the elevation angle, the larger the phase noise because of a larger ‘apparent’ water surface roughness, but still much lower than the amplitude standard deviation.
Figure 13.
Scattered field complex plane representation for a SWH = 36 cm at an elevation angle of = 60° (a), 75° (b) and 86° (c).
Figure 13.
Scattered field complex plane representation for a SWH = 36 cm at an elevation angle of = 60° (a), 75° (b) and 86° (c).
Table 4.
Statistical analysis of the complex field distribution of the scattered GPS signals after retracking, over the CIEM wave channel at different elevation angles: = 60°, 75° and 86°.
Table 4.
Statistical analysis of the complex field distribution of the scattered GPS signals after retracking, over the CIEM wave channel at different elevation angles: = 60°, 75° and 86°.
| (Degrees) | 60° | 75° | 86° |
|---|
| Coherent Scattering: (A.U.) | 22,939 | 37,725 | 43,992 |
| Incoherent Scattering: (A.U.) | 23,648 | 38,392 | 46,307 |
| Ratio Coherent to Incoherent Scattering: (A.U.) | 0.97 | 0.97 | 0.95 |
| Asymmetry Factor: | 39 | 39 | 30 |
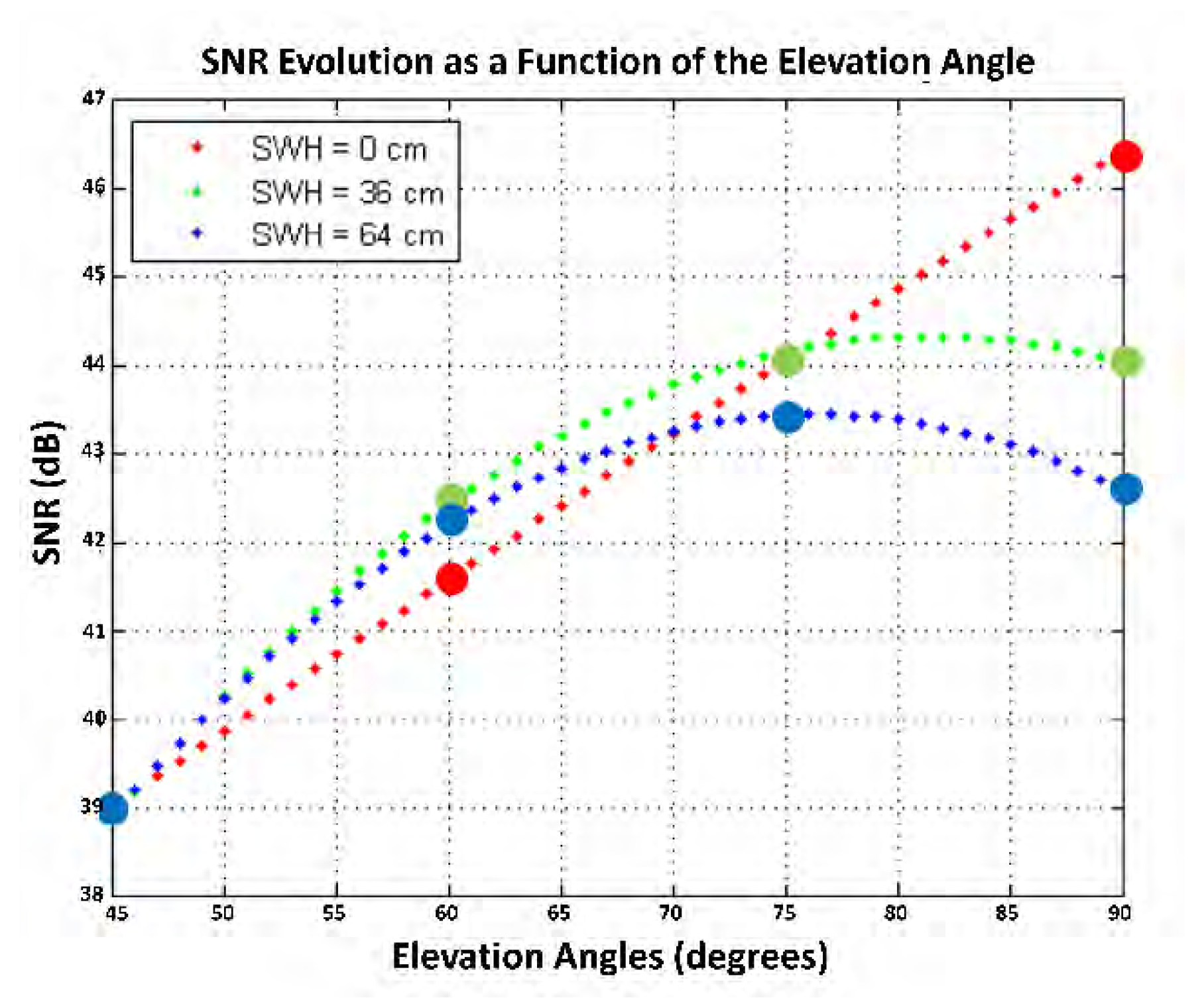
Figure 14.
SNR of the reflected signal for three different surface states and for an elevation angle in the range from = 45° to = 86°. The figure was obtained using a best-fit approximation of the experimental data over elevation angles at = 45°, = 60°, = 75° and = 86°.
Figure 14.
SNR of the reflected signal for three different surface states and for an elevation angle in the range from = 45° to = 86°. The figure was obtained using a best-fit approximation of the experimental data over elevation angles at = 45°, = 60°, = 75° and = 86°.
The signal-to-noise ratio (SNR) of the scattered field increases with increasing elevation angles (
Figure 14). The SNR evolution as a function of the elevation angle is derived using a best-fit approximation of the experimental data at
= 45°, 60°, 75° and 86°. For elevation angles
larger than 60° the value of the SNR decreases with increasing values of the SWH (
Figure 14), because of the larger phase standard deviation (
Figure 13a–c). However, for lower elevation angles, the SNR tends to the same value in both cases: rough and flat surfaces.
3.4. Evaluation of the Effective Small-Scale Surface Roughness
In order to compare GPS scattering data with a simple theoretical model, effective sea surface parameters are introduced [
34]. However, these parameters cannot be applied away from the specular direction, because they depend on the geometry [
35]. The reflectivity of the coherent scattering component can be derived as [
36] (p. 1008):
where subscripts
and
denote the incident polarization (right-hand circular polarization) and the scattered polarization (left-hand circular polarization), respectively,
is the Fresnel reflection coefficient,
is the surface height standard deviation and
is the wavenumber. Note that for a flat surface, the surface height standard deviation (surface roughness)
is zero, and the reflectivity reduces to the square of the amplitude of the Fresnel reflection coefficient. The phase standard deviation of the peak of the complex cross-correlation with the locally-generated C/A code before it is aligned (obviously with some residual noise) to the I axis was computed during the experiment (Figure 4.14 in Enric Valencia’s PhD Thesis [
37] or Figure 3a in [
38] illustrates this point; there, due to the movement of the transmitter, the phase also varied with time), in addition to the measurements of the phase after retracking. The experimental distributions of the before-retracking phase standard deviation
are linked to the rms surface height (The low elevation of the antenna acts as a high-pass filter. SWH is mainly determined by the large-scale waves; waves with larger periods, larger heights and also with higher celerities (
Figure 4). The small-scale rms surface heights values corresponding to the peak of the distributions (~3.1 cm, ~3.1 cm, ~4.4 cm and ~7.2 cm) are the same for both SWH = 36 cm and SWH = 64 cm) (dispersion of the height’s distribution of the small-scale waves) as [
30] (p. 246):
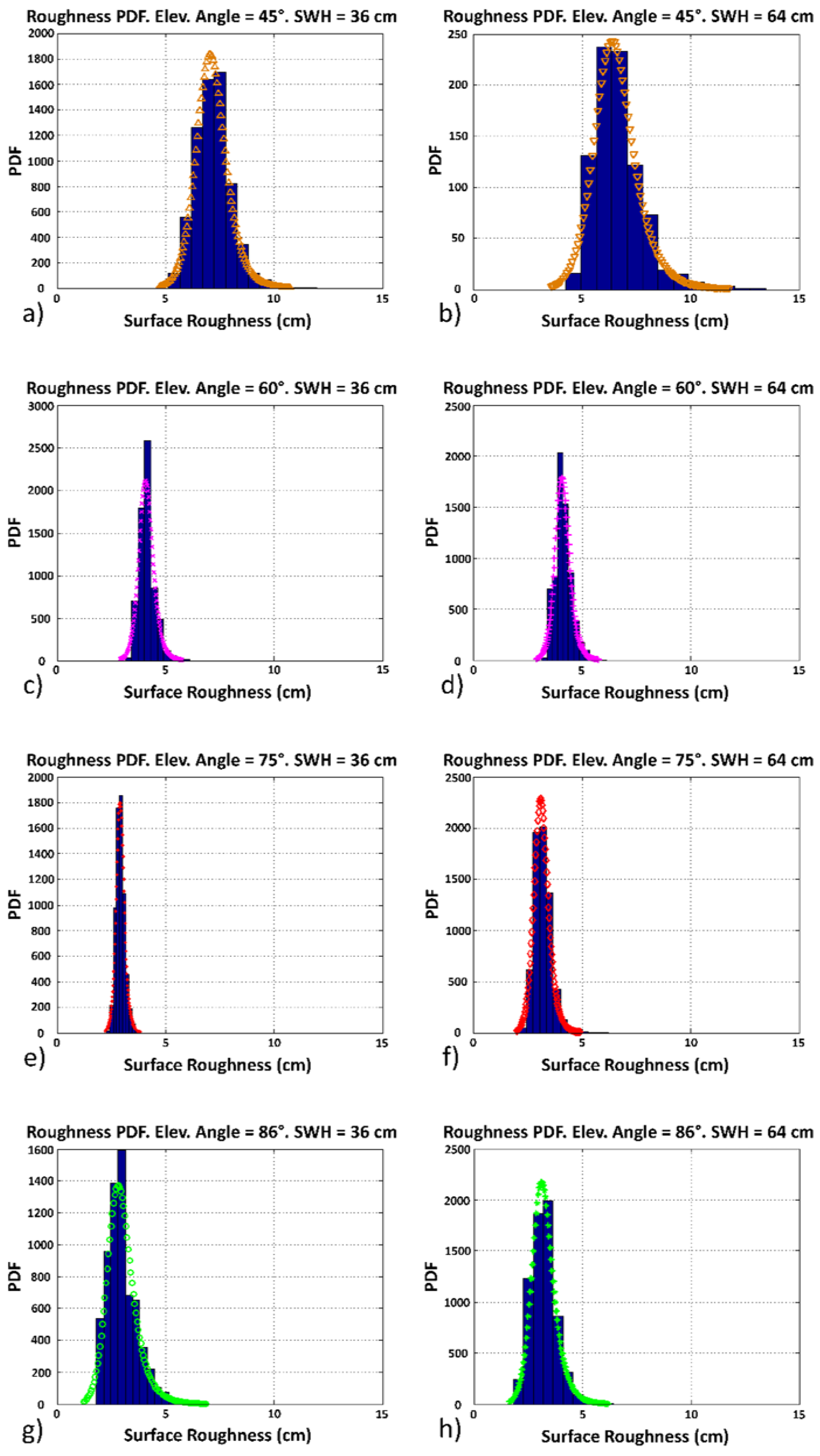
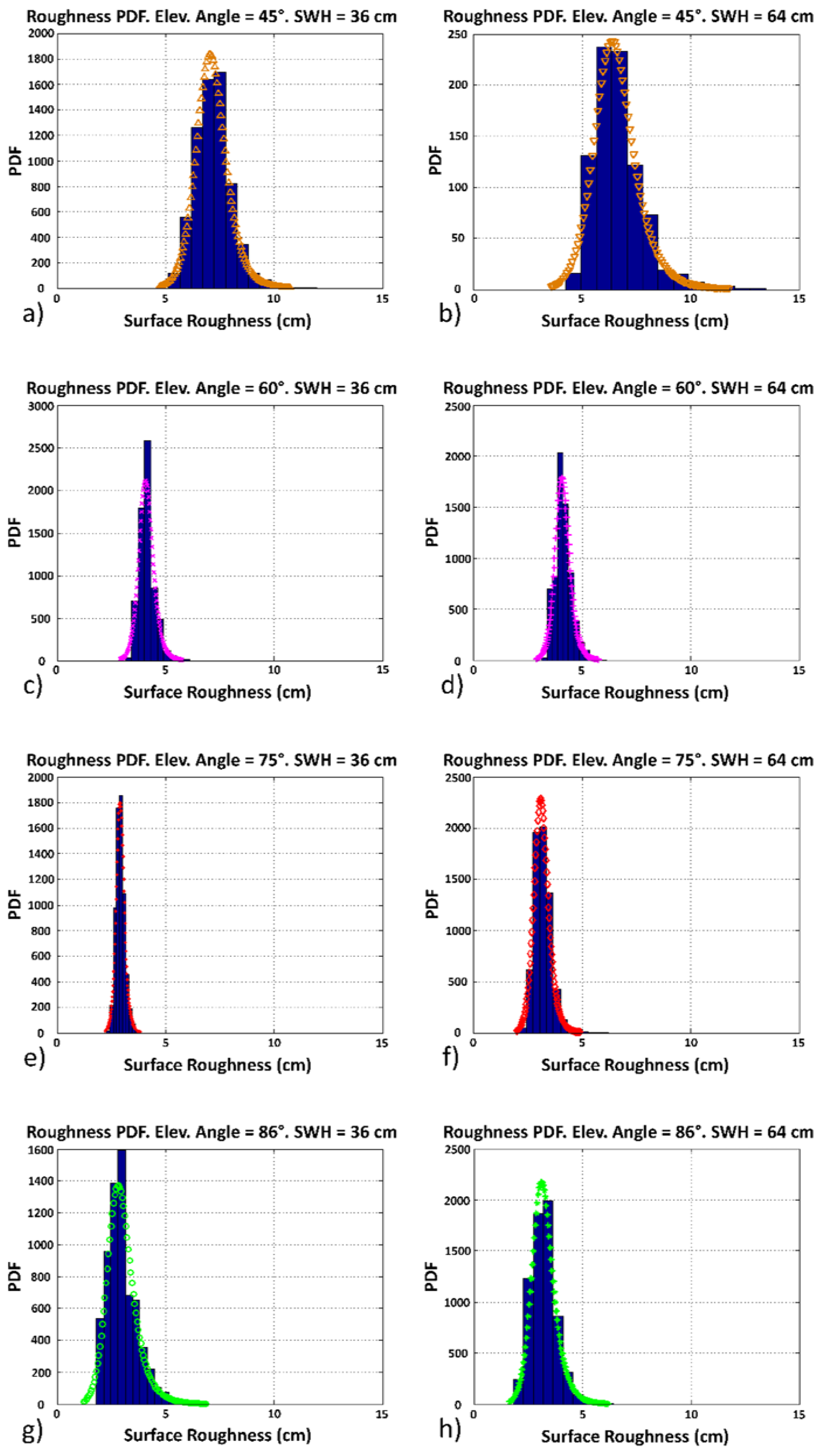
The small-scale surface roughness distributions (Equation (5)) are represented in
Figure 15 for different elevation angles of
= 45°, 60°, 75° and 86°, for a SWH = 36 cm and 64 cm. These distributions are theoretically fitted by log-logistic pdfs (
Figure 15) [
39]. The small-scale surface roughness (rms surface height) values corresponding to the peak of the distributions are ~7.2 cm, ~4.4 cm, ~3.1 cm and ~3.1 cm for a SWH = 36 cm (
Figure 15a,c,e,g respectively) and also for a SWH = 64 cm (
Figure 15b,d,f,h respectively), for elevation angles of
= 45°, 60°, 75° and 86°, respectively. On the other hand, the theoretical roughness values corresponding to half of the coherent reflectivity decaying factor (Equation (4)) are ~1.75 cm, ~1.5 cm, ~1.25 cm and ~1.25 for elevation angles of
= 45°, 60°, 75° and 86°, respectively. Therefore, an experimental correction term
could be derived from the ratio of the empirically-derived (
Figure 15) to the theoretical small-scale surface roughness values (
Table 5). This term is introduced to estimate the effective small scale roughness
. The difference between the effective small-scale roughness and the theoretical values is higher for lower elevation angles, as a factor of ~4.1 and ~2.5 for elevation angles of
= 45° and
= 86°, respectively.
Figure 15.
Theoretical log-logistic pdf approximation to the small-scale surface roughness distributionsfor an elevation angle of (a,b) = 45° (c,d) = 60°, (e,f) = 75° and (g,h) = 86°; for (a,c,e,g) SWH = 36 cm and (b,d,f,h) for SWH = 64 cm. Note: the distributions of the small-scale surface roughness have been derived using the standard deviation of the signal before retracking.
Figure 15.
Theoretical log-logistic pdf approximation to the small-scale surface roughness distributionsfor an elevation angle of (a,b) = 45° (c,d) = 60°, (e,f) = 75° and (g,h) = 86°; for (a,c,e,g) SWH = 36 cm and (b,d,f,h) for SWH = 64 cm. Note: the distributions of the small-scale surface roughness have been derived using the standard deviation of the signal before retracking.
Table 5.
Theoretical and experimental small-scale roughness values and correction term for SWH = 36 cm and 64 cm for = 45°, 60°, 75° and 86°.
Table 5.
Theoretical and experimental small-scale roughness values and correction term for SWH = 36 cm and 64 cm for = 45°, 60°, 75° and 86°.
| (Degrees) | 45° | 60° | 75° | 86° |
|---|
| Theoretical Small-Scale Roughness | 1.75 | 1.5 | 1.25 | 1.25 |
| Experimental Small-Scale Roughness (SWH = 36 cm) | 7.2 | 4.4 | 3.1 | 3.1 |
| Experimental Small Scale Roughness (SWH = 64 cm) | 7.2 | 4.4 | 3.1 | 3.1 |
| Correction Term (SWH = 36 cm) | 4.1 | 2.9 | 2.5 | 2.5 |
| Correction Term (SWH = 64 cm) | 4.1 | 2.9 | 2.5 | 2.5 |




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}