
Maize Leaf Area Index Retrieval from Synthetic Quad Pol SAR Time Series Using the Water Cloud Model



Abstract
:
1. Introduction
2. Data
3. Method
3.1. Water Cloud Model Implementation
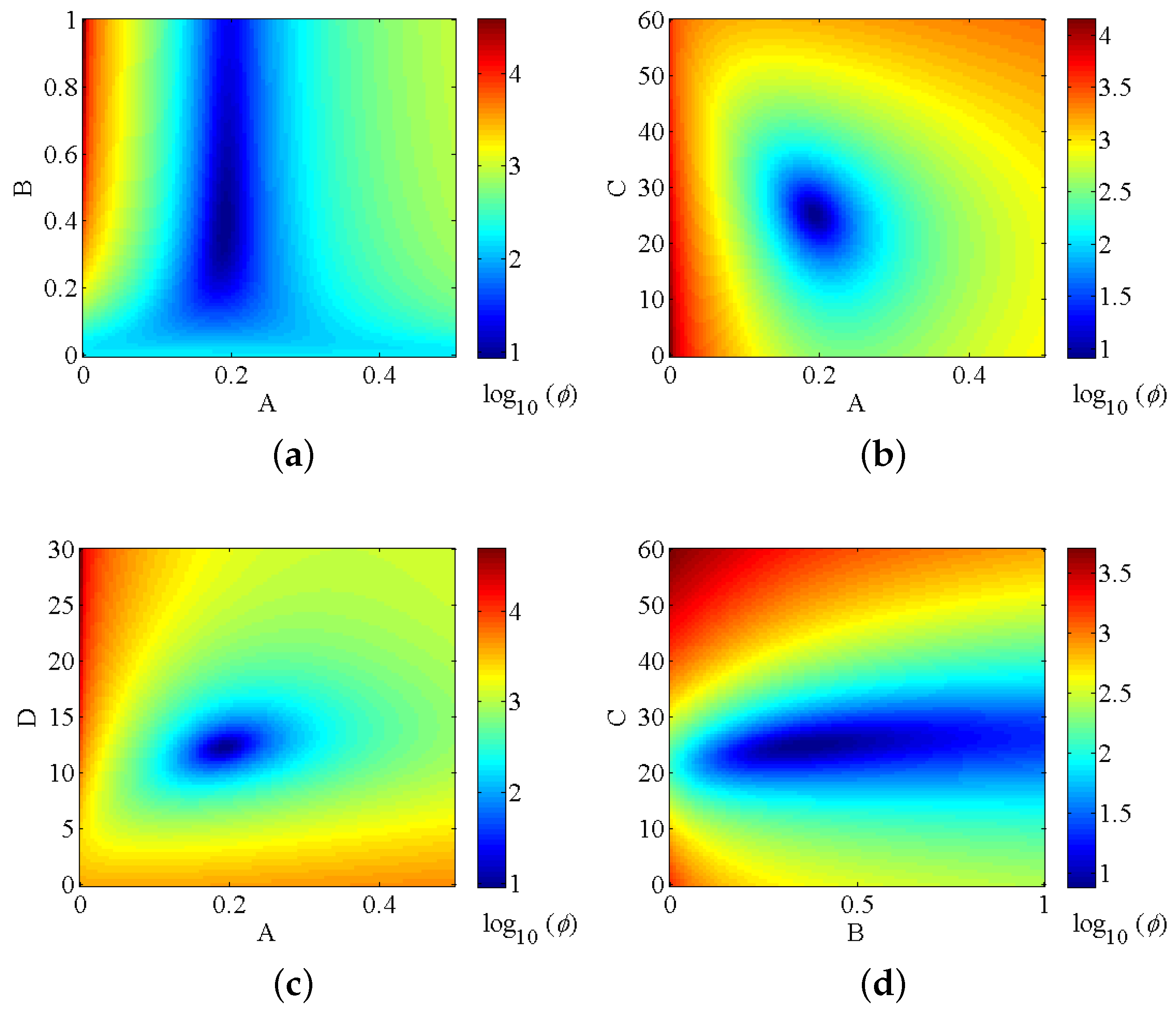
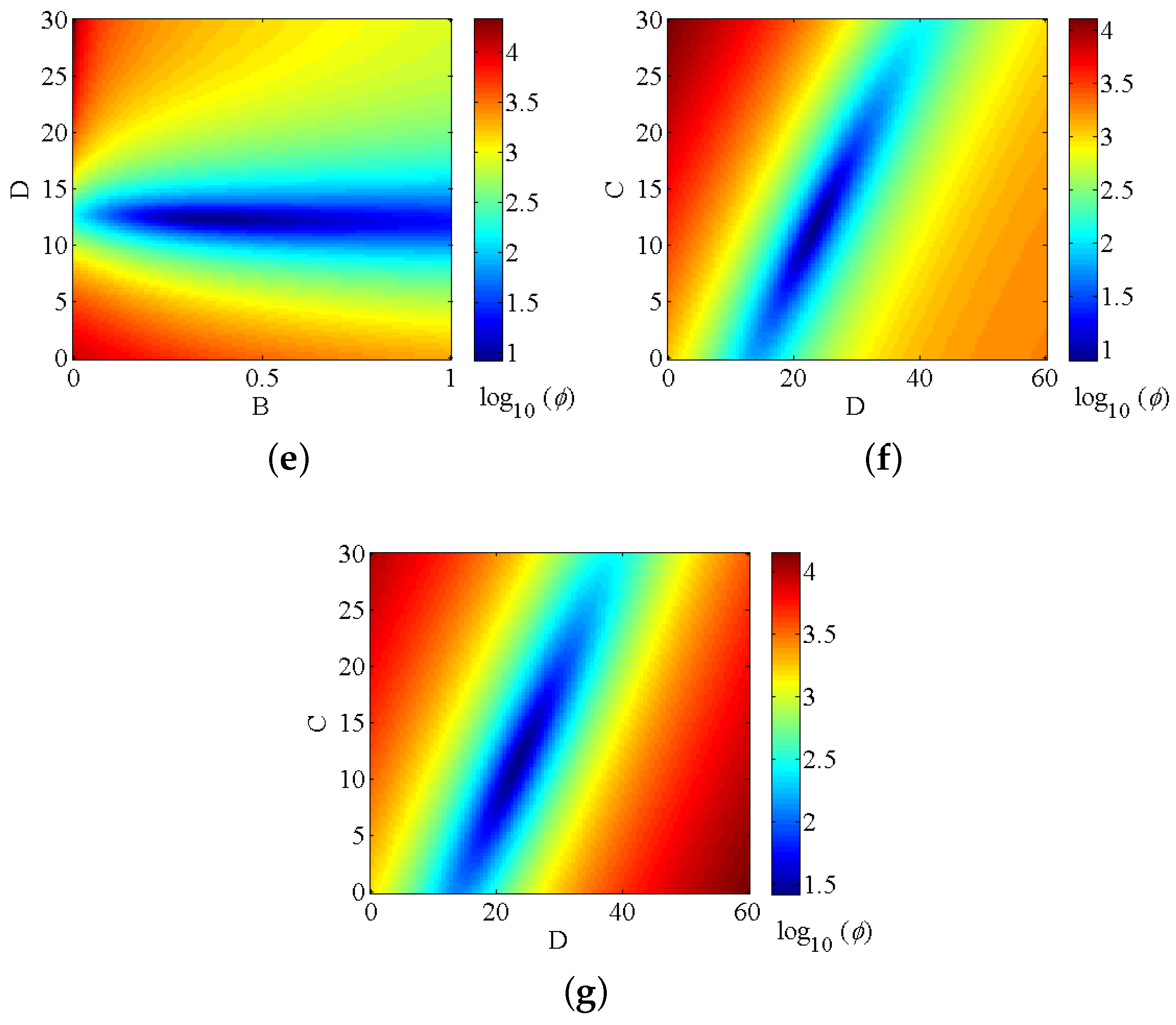
3.2. Three Methodologies for Calibration
- Methodology (i) aims at estimating the parameters A, B, C and D simultaneously using non-linear regression.
- For Methodology (ii), the soil relation was first fitted separately. The slope and intercept coefficients, i.e., parameters C and D, were calculated for a nearly bare soil (LAI = 0.08 m/m) using linear regression. Then, the two parameters related to the maize canopy (A and B) were calibrated using non-linear regression.
- In Methodology (iii), one of the soil calibration parameters, i.e., either C or D, is set using the value obtained in the second methodology, and the remaining parameters are then fitted simultaneously.
3.3. Model Inversion
3.4. Analysis of the Calibration Process and Bayesian Fusion
4. Results
4.1. Impact of Three Calibration Methodologies on the Model Calibration and Inversion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Direct Calibration | Inversion | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Methodology | R | SSD | MAE | RMSE | Bias | MAE | RMSE | Bias | Mean Std | Min Std | Max Std | IC | |
| (db) | (db) | (db) | (db) | (m/m) | (m/m) | (m/m) | (m/m) | (m/m) | (m/m) | (m/m) | |||
| VV | (i) | 0.8 | 0.3 | 0.46 | 0.56 | 0 | 0.95 | 1.36 | 0.27 | 0.27 | 0.06 | 0.61 | 1.03 |
| (ii) | 0.8 | 0.31 | 0.47 | 0.57 | −0.01 | 0.96 | 1.37 | 0.28 | 0.17 | 0 | 0.44 | 0.67 | |
| (iii) C set | 0.8 | 0.31 | 0.47 | 0.57 | 0 | 0.96 | 1.36 | 0.28 | 0.25 | 0.05 | 0.52 | 1 | |
| (iii) D set | 0.8 | 0.31 | 0.47 | 0.56 | 0.01 | 0.96 | 1.36 | 0.28 | 0.22 | 0.03 | 0.44 | 0.87 | |
| HH | (i) | 0.64 | 0.58 | 0.64 | 0.77 | 0 | 1.31 | 1.76 | 0.11 | 0.52 | 0.06 | 1.41 | 2.03 |
| (ii) | 0.66 | 0.59 | 0.65 | 0.78 | 0.01 | 1.35 | 1.8 | 0.16 | 0.23 | 0 | 0.51 | 0.9 | |
| (iii) C set | 0.65 | 0.59 | 0.65 | 0.78 | 0 | 1.35 | 1.81 | −0.17 | 0.6 | 0.05 | 1.61 | 2.35 | |
| (iii) D set | 0.66 | 0.59 | 0.65 | 0.78 | 0.02 | 1.34 | 1.8 | 0.15 | 0.59 | 0.03 | 1.57 | 2.32 | |
| HV | (i) | 0.75 | 0.61 | 0.64 | 0.8 | 0 | 0.93 | 1.34 | 0.14 | 0.47 | 0.07 | 1.19 | 1.79 |
| (ii) | 0.72 | 0.76 | 0.7 | 0.88 | 0.18 | 1.07 | 1.52 | −0.3 | 0.21 | 0 | 0.5 | 0.81 | |
| (iii) C set | 0.75 | 0.63 | 0.64 | 0.8 | 0 | 0.91 | 1.3 | 0.1 | 0.32 | 0.06 | 0.68 | 1.27 | |
| (iii) D set | 0.75 | 0.62 | 0.64 | 0.8 | 0 | 0.93 | 1.34 | 0.14 | 0.43 | 0.02 | 1.24 | 1.67 | |
| Methodology | A | VarA | B | Var B | C | Var C | D | Var D | Corr(C,D) | Corr(A,B) | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| VV | (i) | 0.19 | ∼0 | 0.016 | 0.43 | 0.002 | 0.10 | 25.7 | 2.12 | 0.06 | 12.1 | 0.1 | 0.03 | 0.93 | 0.14 |
| (ii) | 0.19 | ∼0 | 0.015 | 0.38 | 0.001 | 0.08 | 20.9 | - | - | 11.7 | - | - | 0.93 | 0.21 | |
| (iii) C set | 0.19 | ∼0 | 0.016 | 0.39 | 0.001 | 0.09 | 20.9 | - | - | 11.6 | 0.01 | 0.01 | - | 0.13 | |
| (iii) D set | 0.19 | ∼0 | 0.016 | 0.40 | 0.001 | 0.09 | 23.7 | 0.27 | 0.02 | 11.7 | - | - | - | 0.1 | |
| HH | (i) | 0.2 | ∼0 | 0.025 | 0.38 | 0.004 | 0.17 | 20.4 | 4.25 | 0.10 | 13.1 | 0.22 | 0.04 | 0.94 | −0.56 |
| (ii) | 0.2 | ∼0 | 0.025 | 0.34 | 0.003 | 0.16 | 17.1 | - | - | 12.3 | - | - | 0.93 | −0.6 | |
| (iii) C set | 0.2 | ∼ 0 | 0.026 | 0.34 | 0.003 | 0.16 | 17.1 | - | - | 12.4 | 0.03 | 0.01 | - | −0.58 | |
| (iii) D set | 0.2 | ∼0 | 0.026 | 0.34 | 0.003 | 0.16 | 17.2 | 0.48 | 0.04 | 12.3 | - | - | - | −0.59 | |
| HV | (i) | 0.06 | ∼0 | 0.08 | 0.12 | 0.0005 | 0.19 | 22.3 | 3.22 | 0.08 | 20.4 | 0.17 | 0.02 | 0.94 | −0.92 |
| (ii) | 0.05 | ∼0 | 0.04 | 0.15 | 0.0005 | 0.14 | 19.8 | - | - | 20.7 | - | - | 0.93 | −0.77 | |
| (iii) C set | 0.07 | ∼0 | 0.09 | 0.10 | 0.0004 | 0.19 | 19.8 | - | - | 19.8 | 0.02 | 0.01 | - | −0.93 | |
| (iii) D set | 0.06 | ∼0 | 0.07 | 0.13 | 0.0004 | 0.16 | 23.6 | 0.38 | 0.03 | 20.7 | - | - | - | −0.91 |
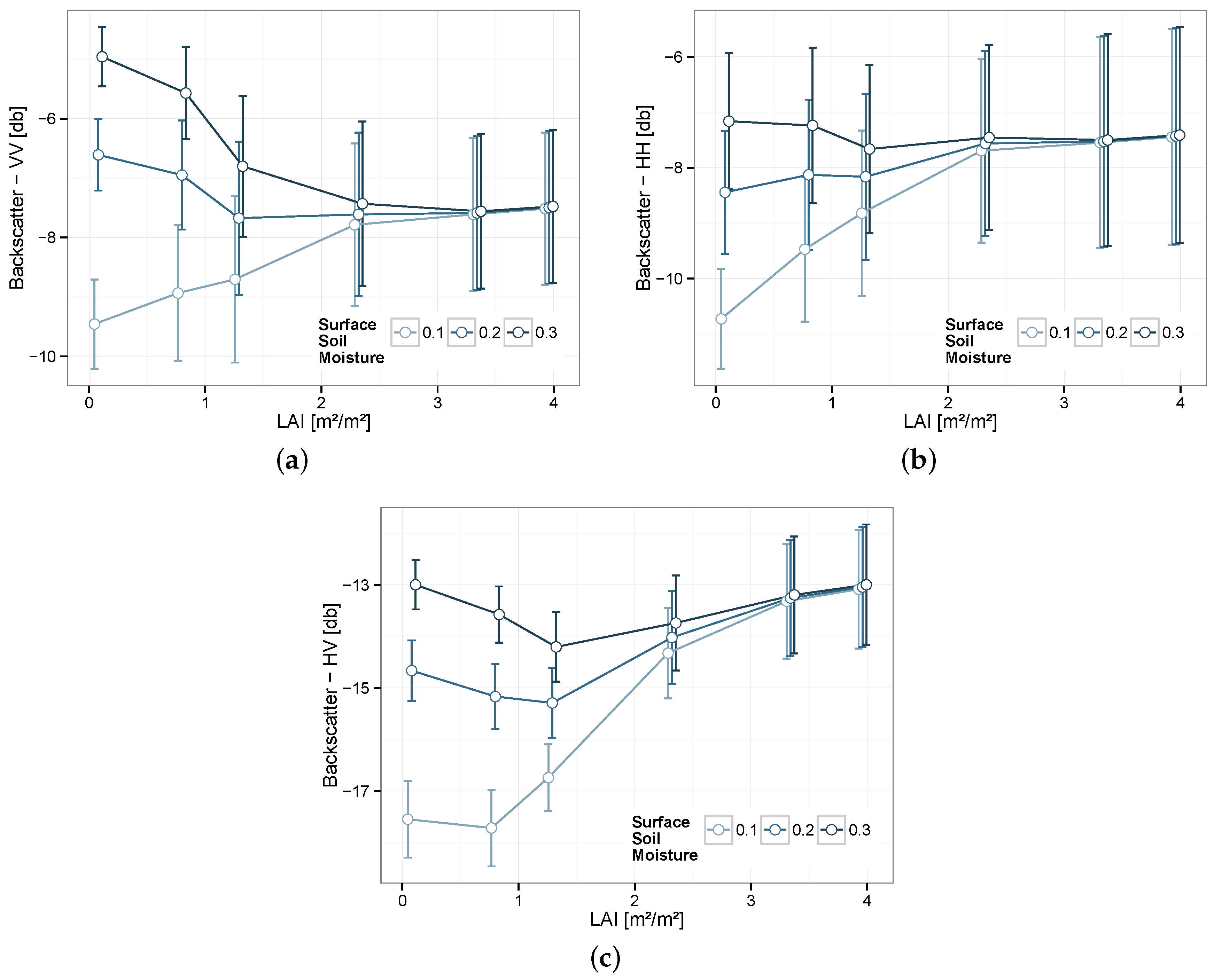
4.2. Insensitivity of the Signal to LAI at Specific Soil Moisture Levels

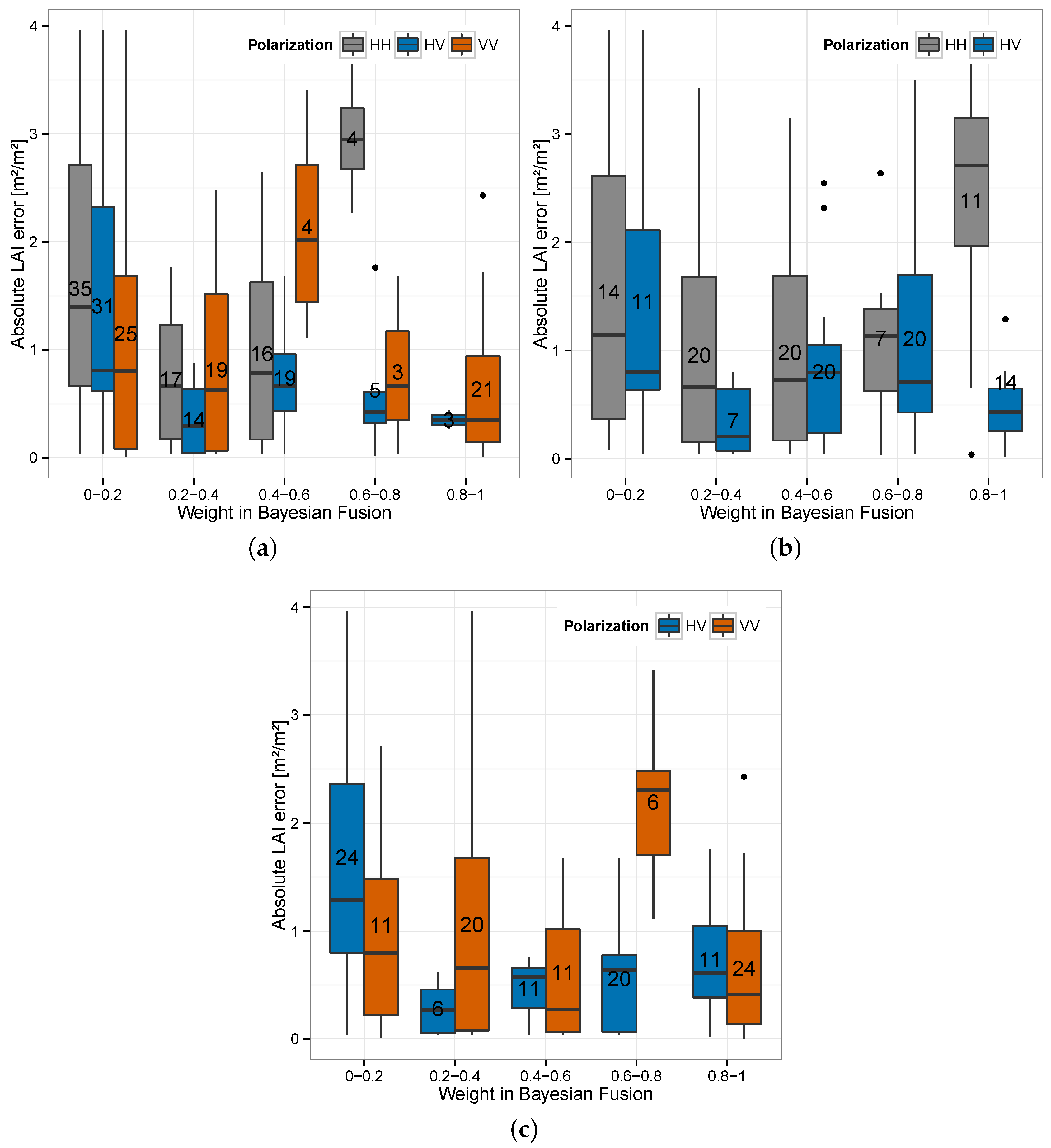
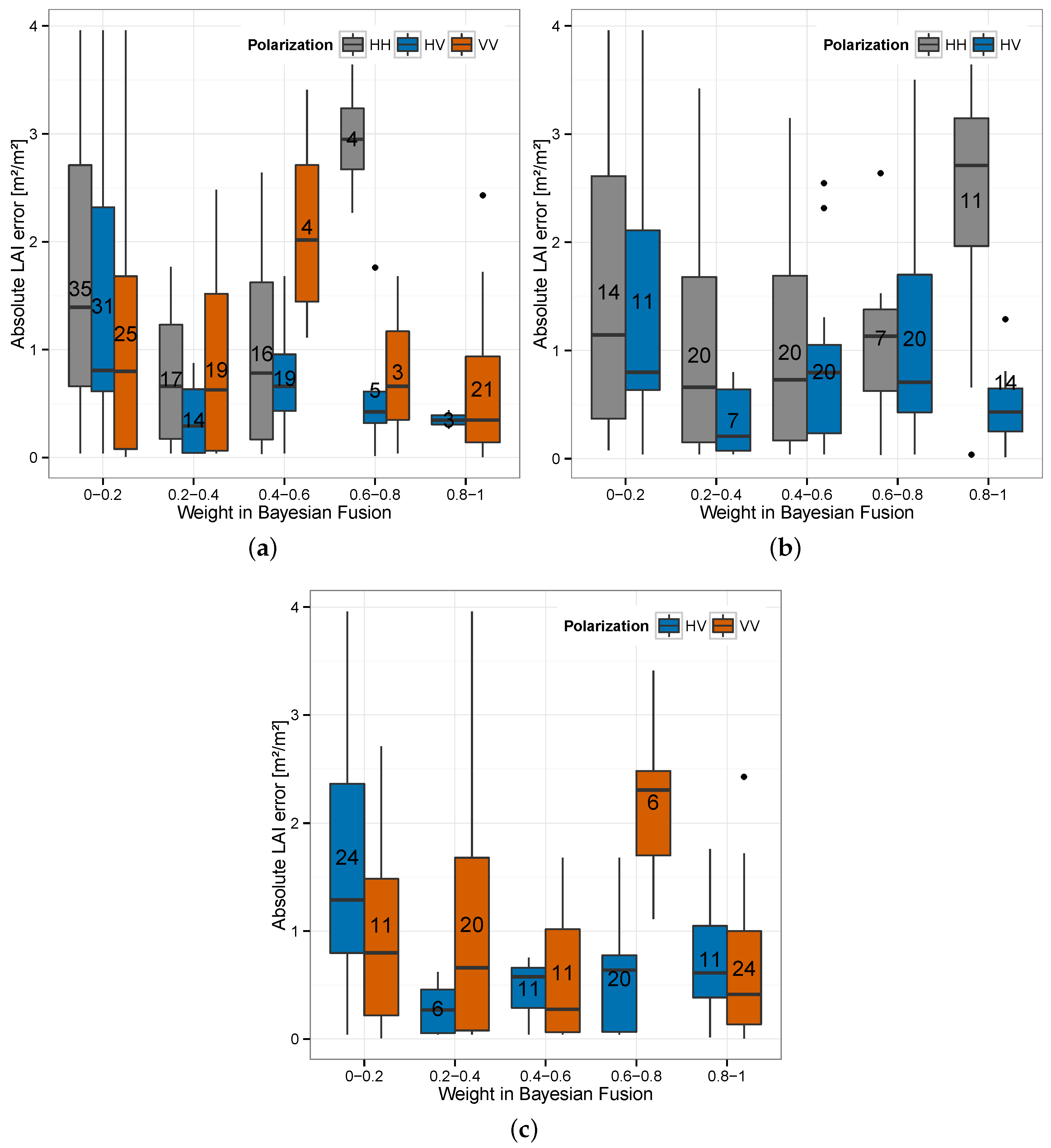
4.3. Bayesian Fusion of LAI Estimates
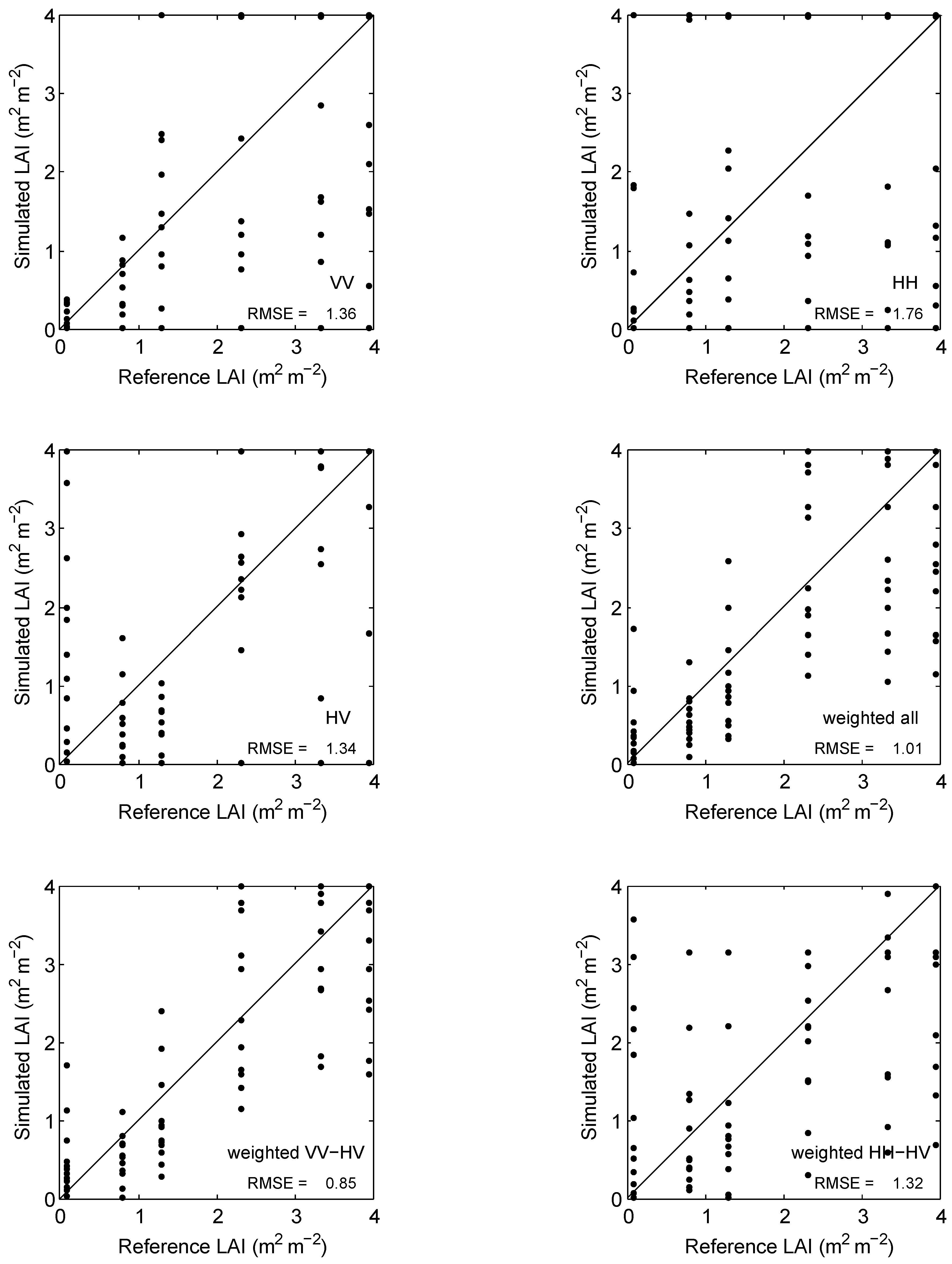
| Polarization | RMSE on LAI (mm) | Std on LAI (mm) | R |
|---|---|---|---|
| Single pol | |||
| VV | 1.36 | 0.27 | 0.38 |
| HH | 1.76 | 0.52 | 0.13 |
| HV | 1.34 | 0.47 | 0.38 |
| Quad pol | |||
| weighted | 1.02 | 0.13 | 0.56 |
| Dual pol | |||
| weighted HH/HV | 1.32 | 0.32 | 0.30 |
| weighted VV/HV | 0.85 | 0.16 | 0.67 |
5. Discussions
6. Conclusions and Perspectives
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Atzberger, C. Object-based retrieval of biophysical canopy variables using artificial neural nets and radiative transfer models. Remote Sens. Environ. 2004, 93, 53–67. [Google Scholar] [CrossRef]
- Pasolli, L.; Asam, S.; Castelli, M.; Bruzzone, L.; Wohlfahrt, G.; Zebisch, M.; Notarnicola, C. Retrieval of Leaf Area Index in mountain grasslands in the Alps from MODIS satellite imagery. Remote Sens. Environ. 2015, 165, 159–174. [Google Scholar] [CrossRef]
- Li, W.; Weiss, M.; Waldner, F.; Demarez, V.; Hagolle, O.; Baret, F. A Generic Algorithm to Estimate LAI, FAPAR and FCOVER Variables from SPOT4_HRVIR and Landsat Sensors: Evaluation of the Consistency and Comparison with Ground Measurements. Remote Sens. 2015, 7, 15494–15516. [Google Scholar] [CrossRef]
- Fung, A. Microwave Scattering and Emission Models and Their Applications; Artech House: Boston, MA, USA, 1994; pp. 1–592. [Google Scholar]
- Bracaglia, M.; Ferrazzoli, P.; Guerriero, L. A fully polarimetric multiple scattering model for crops. Remote Sens. Environ. 1995, 54, 170–179. [Google Scholar] [CrossRef]
- Della Vecchia, A.; Ferrazzoli, P.; Guerriero, L. Modelling microwave scattering from long curved leaves. Waves Random Media 2004, 14, S333–S343. [Google Scholar] [CrossRef]
- Hoekman, D.H.; Quinones, M.J. P-band SAR for optical forest mapping and land cover change. Earth Obs. Q. 1999, 61, 18–22. [Google Scholar]
- Richards, J. Radar backscatter modelling of forests: A review of current trends. Int. J. Remote Sens. 1990, 11, 1299–1312. [Google Scholar] [CrossRef]
- Graham, A.; Harris, R. Extracting biophysical parameters from remotely sensed radar data: A review of the water cloud model. Prog. Phys. Geogr. 2003, 27, 217–229. [Google Scholar] [CrossRef]
- Prevot, L.; Champion, I.; Guyot, G. Estimating surface soil moisture and leaf area index of a wheat canopy using a dual-frequency (C and X bands) scatterometer. Remote Sens. Environ. 1993, 46, 331–339. [Google Scholar] [CrossRef]
- Bertoldi, G.; Della Chiesa, S.; Notarnicola, C.; Pasolli, L.; Niedrist, G.; Tappeiner, U. Estimation of soil moisture patterns in mountain grasslands by means of SAR RADARSAT2 images andhydrological modeling. J. Hydrol. 2014, 516, 245–257. [Google Scholar] [CrossRef]
- Combal, B.; Baret, F.; Weiss, M.; Trubuil, A.; Mace, D.; Pragnere, A.; Myneni, R.; Knyazikhin, Y.; Wang, L. Retrieval of canopy biophysical variables from bidirectional reflectance: Using prior information to solve the ill-posed inverse problem. Remote Sens. Environ. 2003, 84, 1–15. [Google Scholar] [CrossRef]
- Jacquemoud, S.; Baret, F. Estimating Vegetation Biophysical Parameters by Inversion of a Reflectance Model on High Spectral Resolution Data; INRA: Versailles, France, 1993; pp. 339–350. [Google Scholar]
- Durbha, S.S.; King, R.L.; Younan, N.H. Support vector machines regression for retrieval of leaf area index from multiangle imaging spectroradiometer. Remote Sens. Environ. 2007, 107, 348–361. [Google Scholar] [CrossRef]
- Baret, F.; Buis, S. Estimating canopy characteristics from remote sensing observations: Review of methods and associated problems. In Advances in Land Remote Sensing; Springer: Berlin, Germany, 2008; pp. 173–201. [Google Scholar]
- Attema, E.; Ulaby, F.T. Vegetation modeled as a water cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Graham, A.; Harris, R. Estimating crop and waveband specific water cloud model parameters using a theoretical backscatter model. Int. J. Remote Sens. 2002, 23, 5129–5133. [Google Scholar] [CrossRef]
- Bouman, B.; van Kraalingen, D.; Stol, W.; van Leeuwen, H. An agroecological modeling approach to explain ERS SAR radar backscatter of agricultural crops. Remote Sens. Environ. 1999, 67, 137–146. [Google Scholar] [CrossRef]
- Bouman, B.; Goudriaan, J. Estimation of crop growth from optical and microwave soil cover. Int. J. Remote Sens. 1989, 10, 1843–1855. [Google Scholar] [CrossRef]
- Ulaby, F.; Allen, C.; Eger, G.; Kanemasu, E. Relating the microwave backscattering coefficient to leaf area index. Remote Sens. Environ. 1984, 14, 113–133. [Google Scholar] [CrossRef]
- Van Leeuwen, H. Methodology for Combining Optical and Microwave Remote Sensing in Agricultural Crop Monitoring. Ph.D. Thesis, Wageningen Agricultural University, Wageningen, The Netherlands, 1996. [Google Scholar]
- Xu, H.; Steven, M.; Jaggard, K. Monitoring leaf area of sugar beet using ERS-1 SAR data. Int. J. Remote Sens. 1996, 17, 3401–3410. [Google Scholar] [CrossRef]
- Svoray, T.; Shoshany, M. SAR-based estimation of areal aboveground biomass (AAB) of herbaceous vegetation in the semi-arid zone: A modification of the water-cloud model. Int. J. Remote Sens. 2002, 23, 4089–4100. [Google Scholar] [CrossRef]
- Shoshany, M.; Svoray, T.; Curran, P.; Foody, G.M.; Perevolotsky, A. The relationship between ERS-2 SAR backscatter and soil moisture: Generalization from a humid to semi-arid transect. Int. J. Remote Sens. 2000, 21, 2337–2343. [Google Scholar] [CrossRef]
- Champion, I.; Prevot, L.; Guyot, G. Generalized semi-empirical modelling of wheat radar response. Int. J. Remote Sens. 2000, 21, 1945–1951. [Google Scholar] [CrossRef]
- Moran, M.S.; Vidal, A.; Troufleau, D.; Inoue, Y.; Mitchell, T. Ku-and C-band SAR for discriminating agricultural crop and soil conditions. IEEE Trans. Geosci. Remote Sens. 1998, 36, 265–272. [Google Scholar] [CrossRef]
- Lucau-Danila, C. LAI Retrieval from SAR Remote Sensing for Crop Monitoring at Regional Scale. Ph.D. Thesis, Presses Universitaires de Louvain, Louvain-la-Neuve, Belgium, 2008. [Google Scholar]
- Kumar, K.; Hari Prasad, K.; Arora, M. Estimation of water cloud model vegetation parameters using a genetic algorithm. Hydrol. Sci. J. 2012, 57, 776–789. [Google Scholar] [CrossRef]
- Moulin, S.; Fischer, A.; Dedieu, G.; Delécolle, R. Temporal variations in satellite reflectances at field and regional scales compared with values simulated by linking crop growth and SAIL models. Remote Sens. Environ. 1995, 54, 261–272. [Google Scholar] [CrossRef]
- Blaes, X.; Defourny, P.; Wegmüller, U.; Della Vecchia, A.; Guerriero, L.; Ferrazzoli, P. C-band polarimetric indexes for maize monitoring based on a validated radiative transfer model. IEEE Trans. Geosci. Remote Sens. 2006, 44, 791–800. [Google Scholar] [CrossRef]
- Blaes, X.; Defourny, P.; Callens, M.; Verhoest, N.E. Bi-Dimensional soil roughness measurement by photogrammetry for SAR modelling of agricultural surfaces. In Proceedings of the 2004 IEEE International Geoscience and Remote Sensing Symposium (IGARSS ’04), Anchorage, AK, USA; 2004; Volume 6, pp. 4038–4041. [Google Scholar]
- Ulaby, F.T.; Moore, R.K.; Fung, A.K. Volume 1: Microwave remote sensing fundamentals and radiometry. In Microwave Remote Sensing Active and Passive; Artech House: Norwwod, MA, USA, 1986; p. 470. [Google Scholar]
- Champion, I. Simple modelling of radar backscattering coefficient over a bare soil: Variation with incidence angle, frequency and polarization. Int. J. Remote Sens. 1996, 17, 783–800. [Google Scholar] [CrossRef]
- Dabrowska-Zielinska, K.; Inoue, Y.; Kowalik, W.; Gruszczynska, M. Inferring the effect of plant and soil variables on C- and L-band {SAR} backscatter over agricultural fields, based on model analysis. Adv. Space Res. 2007, 39, 139–148. [Google Scholar] [CrossRef]
- Van Leeuwen, H.J.C.; Clevers, J.G.P. Synergy between optical and microwave remote sensing for crop growth monitoring. In Proceedings of the Sixth International Symposium on Physical Measurements and Signatures in Remote Sensing, Val d’Isère, France, 17–21 January 1994.
- Lambot, S.; Javaux, M.; Hupet, F.; Vanclooster, M. A global multilevel coordinate search procedure for estimating the unsaturated soil hydraulic properties. Water Resour. Res. 2002, 38, 1–15. [Google Scholar] [CrossRef]
- Brisco, B.; Brown, R.J. Agricultural application with RADAR. In Principles & Applications of Imaging Radar. Manual of Remote Sensing; Henderson, F.M., Lewis, A.J., Eds.; John Wiley & Sons: New York, NY, USA, 1998; pp. 381–406. [Google Scholar]
- Clausnitzer, V.; Hopmans, J.; Starr, J. Parameter uncertainty analysis of common infiltration models. Soil Sci. Soc. Am. J. 1998, 62, 1477–1487. [Google Scholar] [CrossRef]
- Schweppe, F.C. Uncertain Dynamic Systems; Prentice Hall: Upper Saddle River, NJ, USA, 1973. [Google Scholar]
- Hollenbeck, K.J.; Jensen, K.H. Maximum-likelihood estimation of unsaturated hydraulic parameters. J. Hydrol. 1998, 210, 192–205. [Google Scholar] [CrossRef]
- Fasbender, D. Bayesian Data Fusion in Environmental Sciences: Theory and Applications. Ph.D. Thesis, Université Catholique de Louvain, Louvain-la-Neuve, Belgium, 2008. [Google Scholar]
- Ferrazzoli, P.; Paloscia, S.; Pampaloni, P.; Schiavon, G.; Sigismondi, S.; Solimini, D. The potential of multifrequency polarimetric SAR in assessing agricultural and arboreous biomass. IEEE Trans. Geosci. Remote Sens. 1997, 35, 5–17. [Google Scholar] [CrossRef]
- Gao, S.; Niu, Z.; Huang, N.; Hou, X. Estimating the Leaf Area Index, height and biomass of maize using HJ-1 and RADARSAT-2. Int. J. Appl. Earth Obs. Geoinf. 2013, 24, 1–8. [Google Scholar] [CrossRef]
- Moran, M.S.; Alonso, L.; Moreno, J.F.; Mateo, M.P.C.; la Cruz, D.; Fernando, D.; Montoro, A. A RADARSAT-2 quad-polarized time series for monitoring crop and soil conditions in Barrax, Spain. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1057–1070. [Google Scholar] [CrossRef]
- Jiao, X.; McNairn, H.; Shang, J.; Pattey, E.; Liu, J.; Champagne, C. The sensitivity of RADARSAT-2 polarimetric SAR data to corn and soybean leaf area index. Can. J. Remote Sens. 2011, 37, 69–81. [Google Scholar] [CrossRef]
- McNairn, H.; Van der Sanden, J.; Brown, R.; Ellis, J. The potential of RADARSAT-2 for crop mapping and assessing crop condition. In Proceedings of the Second International Conference on Geospatial Information in Agriculture and Forestry, Lake Buena Vista, FL, USA, 10–12 January 2000; pp. 10–12.
- Ferrazzoli, P.; Paloscia, S.; Pampaloni, P.; Schiavon, G.; Solimini, D.; Coppo, P. Sensitivity of microwave measurements to vegetation biomass and soil moisture content: A case study. IEEE Trans. Geosci. Remote Sens. 1992, 30, 750–756. [Google Scholar] [CrossRef]
- Inoue, Y.; Sakaiya, E.; Wang, C. Capability of C-band backscattering coefficients from high-resolution satellite SAR sensors to assess biophysical variables in paddy rice. Remote Sens. Environ. 2014, 140, 257–266. [Google Scholar] [CrossRef]
- Beriaux, E.; Lucau-Danila, C.; Auquiere, E.; Defourny, P. Multiyear independent validation of the water cloud model for retrieving maize leaf area index from SAR time series. Int. J. Remote Sens. 2013, 34, 4156–4181. [Google Scholar] [CrossRef]
- Raney, R.K. The delay/Doppler radar altimeter. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1578–1588. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- SENTINEL-1 Observation Scenario. Available online: https://sentinel.esa.int/web/sentinel/missions/sentinel-1/observation-scenario (accessed on 30 October 2015).
- Auquière, E. SAR Temporal Series Interpretation and Backscattering Modelling for Maize Growth Monitoring; Presses universitaires de Louvain: Louvain-la-Neuve, Belgium, 2001. [Google Scholar]
- Claverie, M.; Vermote, E.F.; Weiss, M.; Baret, F.; Hagolle, O.; Demarez, V. Validation of coarse spatial resolution {LAI} and {FAPAR} time series over cropland in southwest France. Remote Sens. Environ. 2013, 139, 216–230. [Google Scholar] [CrossRef]
- Zhao, J.; Li, J.; Liu, Q.; Fan, W.; Zhong, B.; Wu, S.; Yang, L.; Zeng, Y.; Xu, B.; Yin, G. Leaf area index retrieval combining HJ1/CCD and Landsat8/OLI data in the Heihe River Basin, China. Remote Sens. 2015, 7, 6862–6885. [Google Scholar] [CrossRef]
- Mridha, N.; Sahoo, R.; Kumar, D.N.; Sehgal, V.; Krishna, G.; Pradhan, S.; Gupta, V. Genetic algorithm based inversion modelling of PROSAIL for retrieval of wheat biophysical parameters from bi-directional reflectance data. J. Agric. Phys. 2014, 14, 87–95. [Google Scholar]
- Verrelst, J.; Rivera, J.P.; Veroustraete, F.; Muñoz-Marí, J.; Clevers, J.G.; Camps-Valls, G.; Moreno, J. Experimental Sentinel-2 LAI estimation using parametric, non-parametric and physical retrieval methods—A comparison. ISPRS J. Photogramm. Remote Sens. 2015, 108, 260–272. [Google Scholar] [CrossRef]
- Baret, F.; Neale, C.; Maltese, A. Biophysical vegetation variables retrieval from remote sensing observations. In Proceedings of the SPIE 7824, Remote Sensing for Agriculture, Ecosystems, and Hydrology XII, Toulouse, France, 20 September 2010; Volume 7824, pp. 17–19.
- Global Climate Observing System (GCOS). Implementation Plan for the Global Observing System for Climate in Support of the UNFCCC; GCOS-138 (GOOS-184, GTOS-76, WMO-TD/No. 1523); GCOS: Geneva, Switzerland, 2010; p. 183. Available online: http://www.wmo.int/pages/prog/gcos/Publications.htm (accessed on 11 November 2015).
- Xue, Y.; Li, X.; Li, Z.; Cao, C. Prior knowledge-based retrieval and validation of information from remote-sensing data at various scales. Int. J. Remote Sens. 2012, 33, 665–673. [Google Scholar] [CrossRef]
- Albergel, C.; de Rosnay, P.; Gruhier, C.; Muñoz-Sabater, J.; Hasenauer, S.; Isaksen, L.; Kerr, Y.; Wagner, W. Evaluation of remotely sensed and modeled soil moisture products using global ground-based in situ observations. Remote Sens. Environ. 2012, 118, 215–226. [Google Scholar] [CrossRef]
- Bériaux, E.; Lambot, S.; Defourny, P. Estimating surface-soil moisture for retrieving maize leaf-area index from SAR data. Can. J. Remote Sens. 2011, 37, 136–150. [Google Scholar] [CrossRef]
- Hosseini, M.; McNairn, H.; Merzouki, A.; Pacheco, A. Estimation of Leaf Area Index (LAI) in corn and soybeans using multi-polarization C-and L-band radar data. Remote Sens. Environ. 2015, 170, 77–89. [Google Scholar] [CrossRef]
- Lievens, H.; Verhoest, N.E. On the retrieval of soil moisture in wheat fields from L-band SAR based on Water Cloud modeling, the IEM, and effective roughness parameters. IEEE Geosci. Remote Sens. Lett. 2011, 8, 740–744. [Google Scholar] [CrossRef]
- Kroes, J.; Wesseling, J.; Van Dam, J. Integrated modelling of the soil–water–atmosphere–plant system using the model SWAP 2·0 an overview of theory and an application. Hydrol. Process. 2000, 14, 1993–2002. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons by Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bériaux, E.; Waldner, F.; Collienne, F.; Bogaert, P.; Defourny, P. Maize Leaf Area Index Retrieval from Synthetic Quad Pol SAR Time Series Using the Water Cloud Model. Remote Sens. 2015, 7, 16204-16225. https://doi.org/10.3390/rs71215818
Bériaux E, Waldner F, Collienne F, Bogaert P, Defourny P. Maize Leaf Area Index Retrieval from Synthetic Quad Pol SAR Time Series Using the Water Cloud Model. Remote Sensing. 2015; 7(12):16204-16225. https://doi.org/10.3390/rs71215818
Chicago/Turabian StyleBériaux, Emilie, François Waldner, François Collienne, Patrick Bogaert, and Pierre Defourny. 2015. "Maize Leaf Area Index Retrieval from Synthetic Quad Pol SAR Time Series Using the Water Cloud Model" Remote Sensing 7, no. 12: 16204-16225. https://doi.org/10.3390/rs71215818