1. Introduction
Today, it is anticipated that many of the future remote sensing processes for forestry will be based on point cloud processing or on elevation models. Laser scanning is currently the primary technique that directly produces three-dimensional (3D) data. Other techniques, e.g., digital photogrammetry (DP) or radargrammetry, transform two-dimensional (2D) images into 3D data (image-based point cloud) by spatial intersection based on two or more images taken from different positions (stereo images).
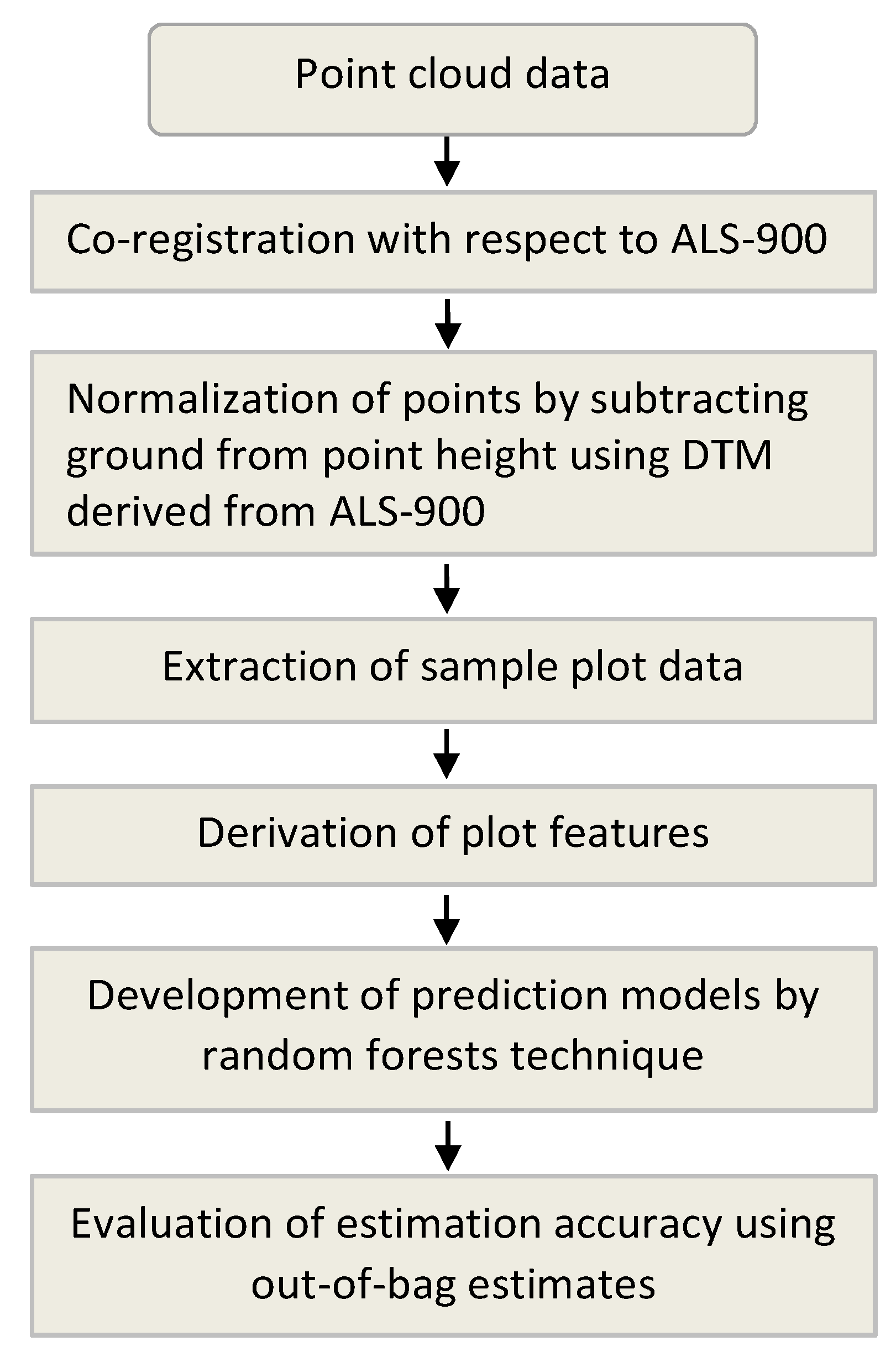
Airborne laser scanning (ALS) is a method based on laser range measurements from an aircraft and the precise orientation of these measurements. The position and orientation of the sensor is continuously recorded using differential-GPS and inertial measurement units (IMU) along the flight path. The ALS gives the geo-referenced point cloud, from which it is possible to calculate 3D models of scanned objects, e.g., digital surface model (DSM), digital terrain model (DTM), canopy height model (CHM) and the full 3D model of the forests. In addition to the 3D point cloud data, intensity and sometimes the full waveform of the target can also be recorded. Depending on the flight specifications and system used, typical data density can vary from 0.1 to tens of points per square meter.
Airborne laser scanning is feasible for forest mapping inventory because laser pulses can penetrate the forest canopy and reach the ground, thus main forest parameters such as tree height, diameter at breast height (DBH), volume and biomass can be accurately measured or estimated solely based on ALS data [
1,
2]. The first studies of ALS for forestry purposes included standwise mean height and volume estimation [
3,
4,
5], individual-tree-based height determination and volume estimation [
1,
6], tree-species classification [
7,
8], and measurement of forest growth and detection of harvested trees [
9,
10,
11]. Rapid technical advances in laser scanning currently make ALS one of the most promising technologies for the retrieval of detailed information on forests at different levels,
i.e., from the individual tree to the plot/stand and nationwide. By using ALS-based inventory, 5%–20% error at stand level has been obtained depending on the attributes estimated. For overviews on using ALS in forest inventory, see Hyyppä
et al. [
12].
When considering alternatives for continuous wide-area surveys, more cost-effective approaches are searched for in this regard. Recently, there is growing interest in the use of very high spatial resolution digital stereo imagery to generate information analogous to ALS data to support forest inventory and monitoring. DP is a technique to establish the geometric relationship between an object and digital stereo images and derive information about the object strictly from the images. By the use of DP, 3D coordinates of an object are determined by measurements made in two or more images taken from different positions. Common points are identified on each image. A line of sight (or ray) can be constructed from the camera location to the point on the object. It is the intersection of these rays that determines the 3D location of the point (spatial intersection). The major challenge in DP is the automated search of corresponding points (also called tie-points) on stereo image pairs. There are three groups of methods for this task: local area-based method, feature-based method and semi global matching. The accuracy of the extracted 3D coordinates depends at least on the accuracy of the image orientations, the base-to-height (B/H) ratio of the matched images, the ground sampling distance, and matching accuracy [
13,
14].
Analogously to photogrammetric spatial intersection, radargrammetry, which is based on stereoscopic measurement of synthetic aperture radar (SAR) images, can be used to calculate the 3D coordinates for corresponding points on a stereo pair of SAR images with different off-nadir angles. Another approach to extract 3D information from the SAR images is SAR interferometry (
i.e., InSAR). InSAR makes use of two complex SAR images, which are acquired from slightly different perspectives and pixel-by-pixel phase differences are converted into elevation differences of the terrain [
15,
16].
To date, there are a limited number of studies that have investigated the accuracy of forest inventory attributes estimated using point cloud derived from various data sources. Most of these studies focused on digital aerial images and ALS data. Bohlin
et al. [
17] estimated tree height, stem volume, and basal area using height, density, and texture metrics derived from an image-based digital surface model using area-based approach. Accuracy was evaluated using 24 stands with a mean size of 2.8 ha. Root mean square errors (RMSEs) achieved were 8.8% for tree height, 13.1% for stem volume, and 14.9% for basal area. A comparison with the estimates from ALS point cloud at the same site showed slightly better accuracy,
i.e., smaller RMSEs. Järnstedt
et al. [
18] compared the accuracy of forest attribute estimates (diameter, mean height, dominant height, basal area, and stock volume) generated from ALS and from an image-based DSM and found that ALS-based models had better accuracies for all the attributes than image-based model had. Vastaranta
et al. [
19] achieved a better accuracy using similar datasets. White
et al. [
20] carried out a detailed comparison of the similarities and differences between ALS and image-based point cloud on their acquisition, processing, production and cost. Nurminen
et al. [
13] compared relative accuracies of mean height, diameter at breast height and volume derived from ALS and aerial image-based point clouds and reported a comparable accuracy from both datasets.
These studies made a comparison between aerial image-based and ALS point cloud. However, the airborne platform for remote sensing (RS) is relative expensive and it can, therefore, not be used for frequent mapping inventories over large areas. Space-borne sensors can cover large areas and often have very short revisit times. Therefore, 3D information derivation from space-borne RS data is developing rapidly, thanks to the latest development of very-high-resolution optical and SAR satellites and their capability of providing images suitable for 3D information. For example, promising results have been reported by Chen
et al. [
21]. Furthermore, recent studies by Perko
et al. [
22], Karjalainen
et al. [
23], Persson and Fransson [
24] and Solberg
et al. [
25] revealed the potential of radargrammetric 3D data in forest attribute estimation. For example, Karjalainen
et al. [
23] used TerraSAR-X radargrammetry to derive estimates for the mean height and stem volume (the relative RMSE of 34% for stem volume) at the plot level in a boreal forest zone. Persson and Fransson [
24] obtained RMSE of 22.9% for biomass and 9.4% for height at the stand level using TerraSAR-X radargrammetry data. Solberg
et al. [
26] and Karila
et al. [
27] have also demonstrated the successful use of InSAR in estimation of forest attributes in the Boreal forest zone. Persson
et al. [
28] indicated promising results for biomass and height estimation in a boreal forest in Sweden when using SPOT-5 data as substitute for a DSM and a DTM from ALS data. St-Onge
et al. [
29] assessed the accuracy of the forest height and biomass estimates derived from an IKONOS stereo pair with 1 m spatial resolution and an ALS DTM, and reported accuracy of the IKONOS predictions was slightly lower than that of the ALS predictions. Neigh
et al. [
30] studied the accuracy of stereo IKONOS for mapping tree height in three different biogeographic regions of the US by the use of DTM provided by the United States Geological Survey National Elevation Data. They concluded that IKONOS stereo data are a useful ALS alternative where high-quality DTMs are available. Montesano
et al. [
31] evaluated the uncertainty of canopy height estimates from complementary spaceborne measurements (spaceborne laser data from the Geoscience Laser Altimeter System and high resolution stereo imagery from Worldview-1 satellite) in the taiga (boreal forest)–tundra ecotone. With a linear model, spaceborne-derived canopy height measurements at the plot-scale predicted stand height ~5 m–~10 m tall with an uncertainty ranging from ±0.86 m–1.37 m. Rahlf
et al. [
32] compared the accuracy of timber volume prediction based on four different 3D RS datasets (ALS, stereo aerial photogrammetry, TerraSAR-X radargrammetry and TanDEM-X InSAR
) in one study area in southern Norway and concluded that ALS provided the most accurate prediction at plot level (250 m
2) followed by aerial photogrammetry, InSAR, and radargrammetry. It is worth to emphasize that the use of all other techniques except ALS for forest inventory mapping requires an accurate DTM available.
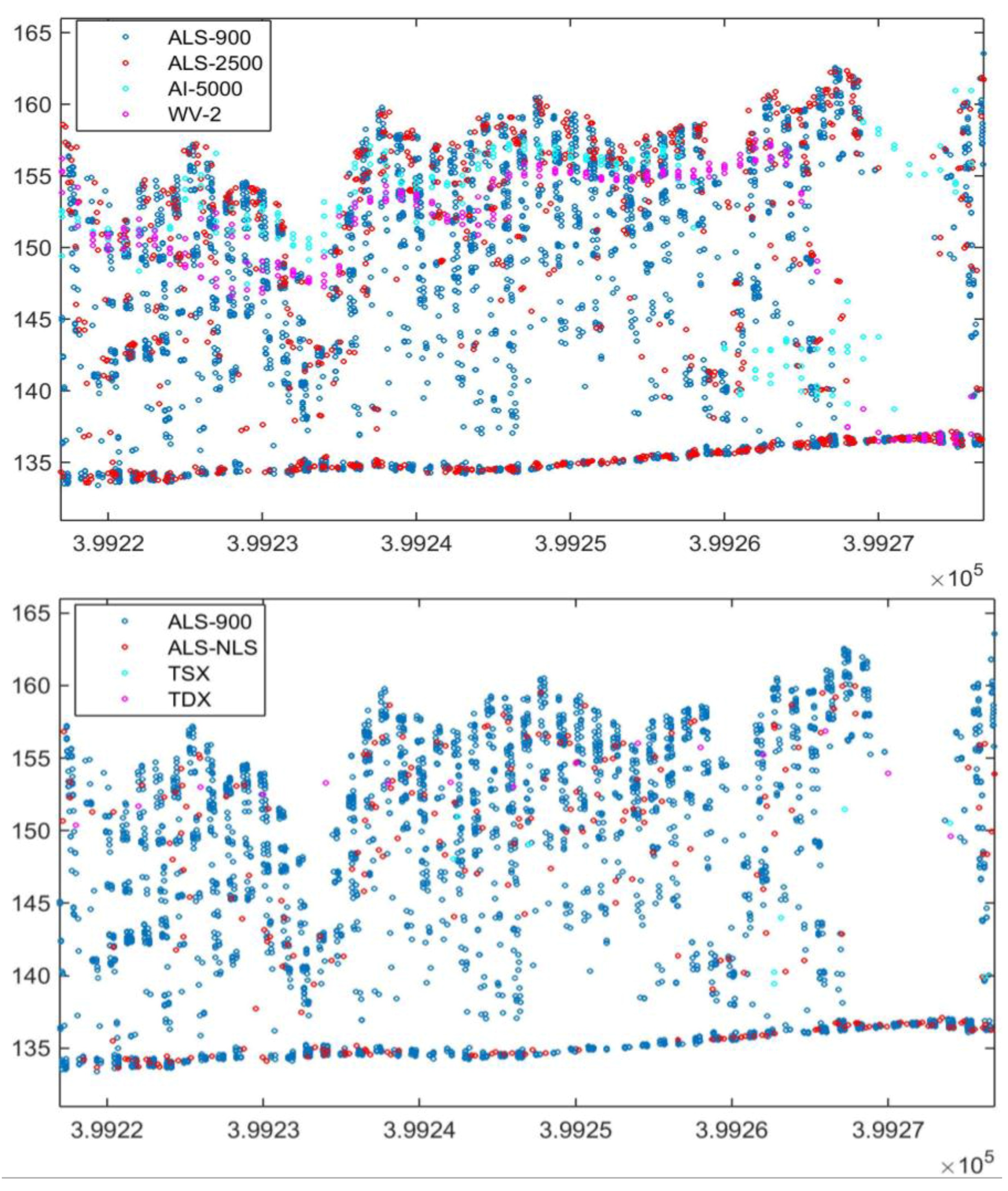
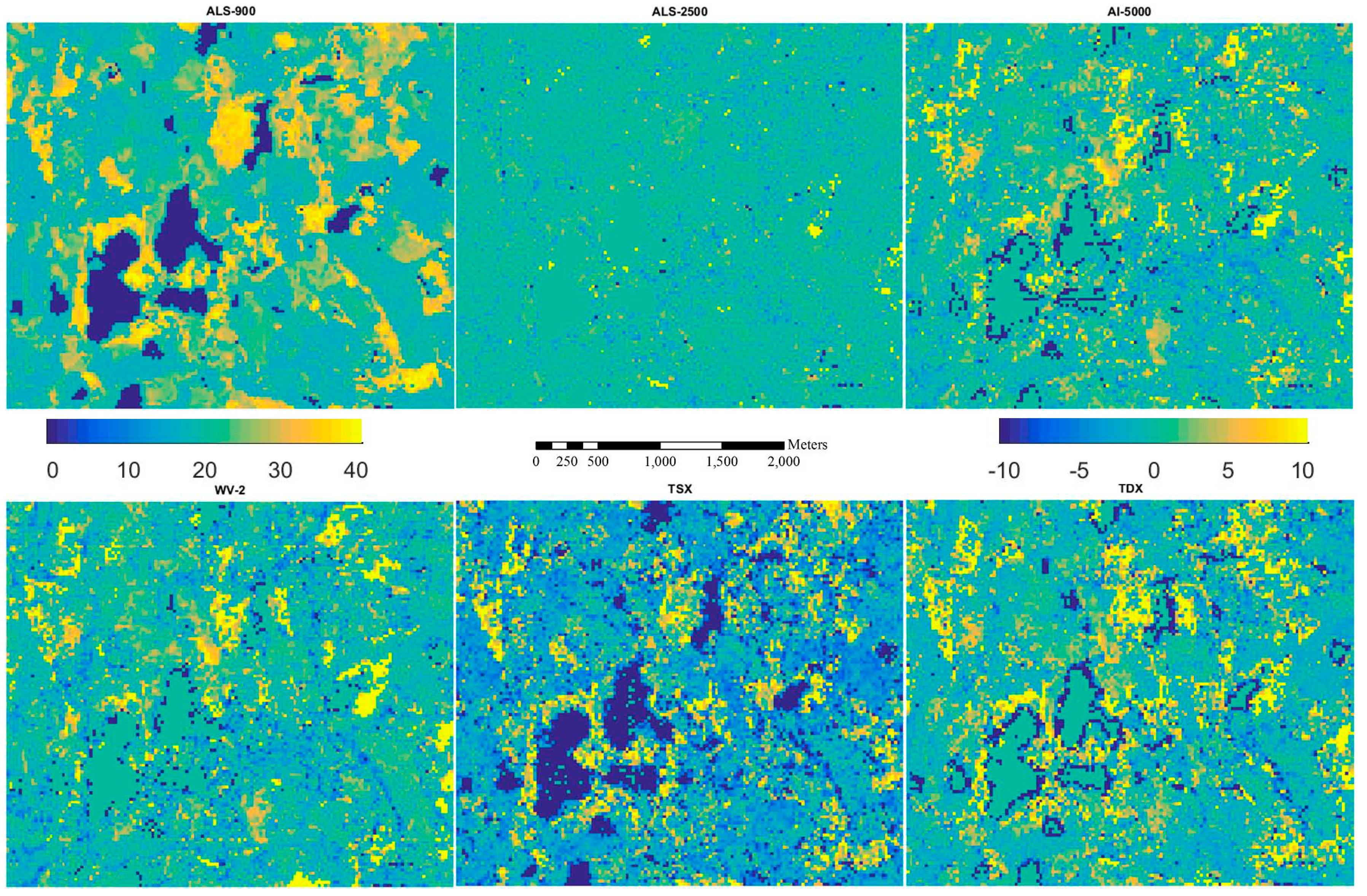
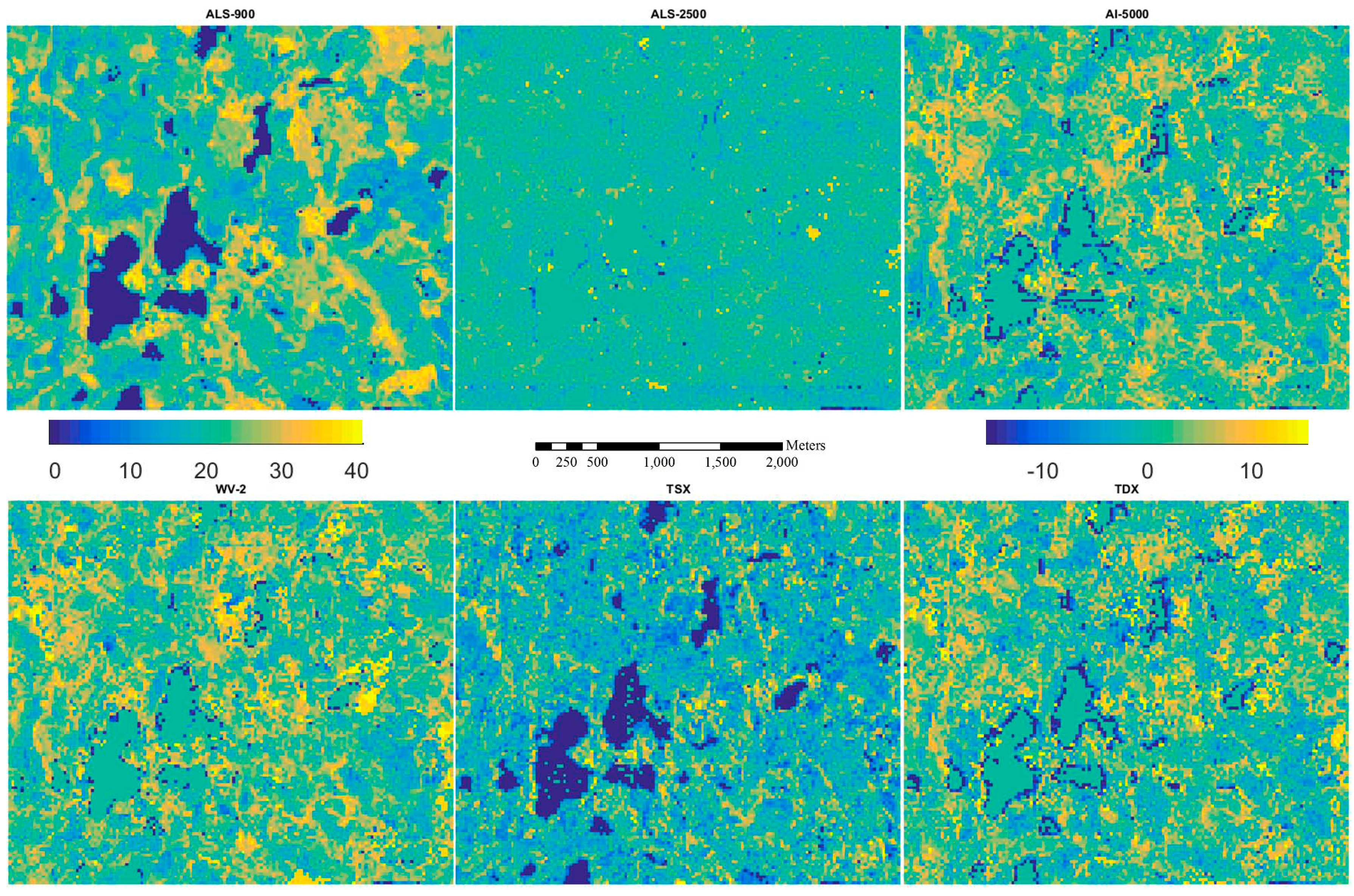
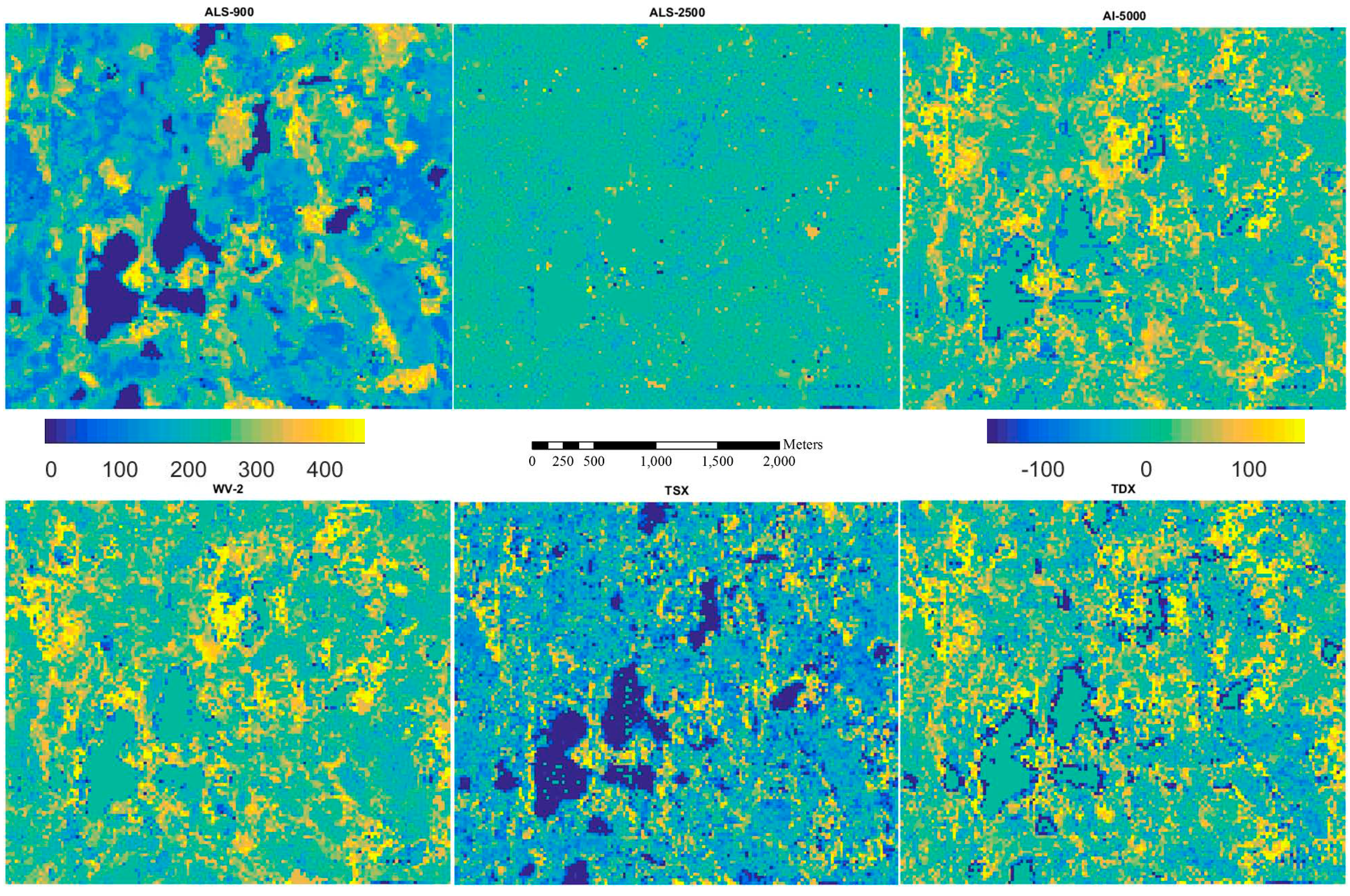
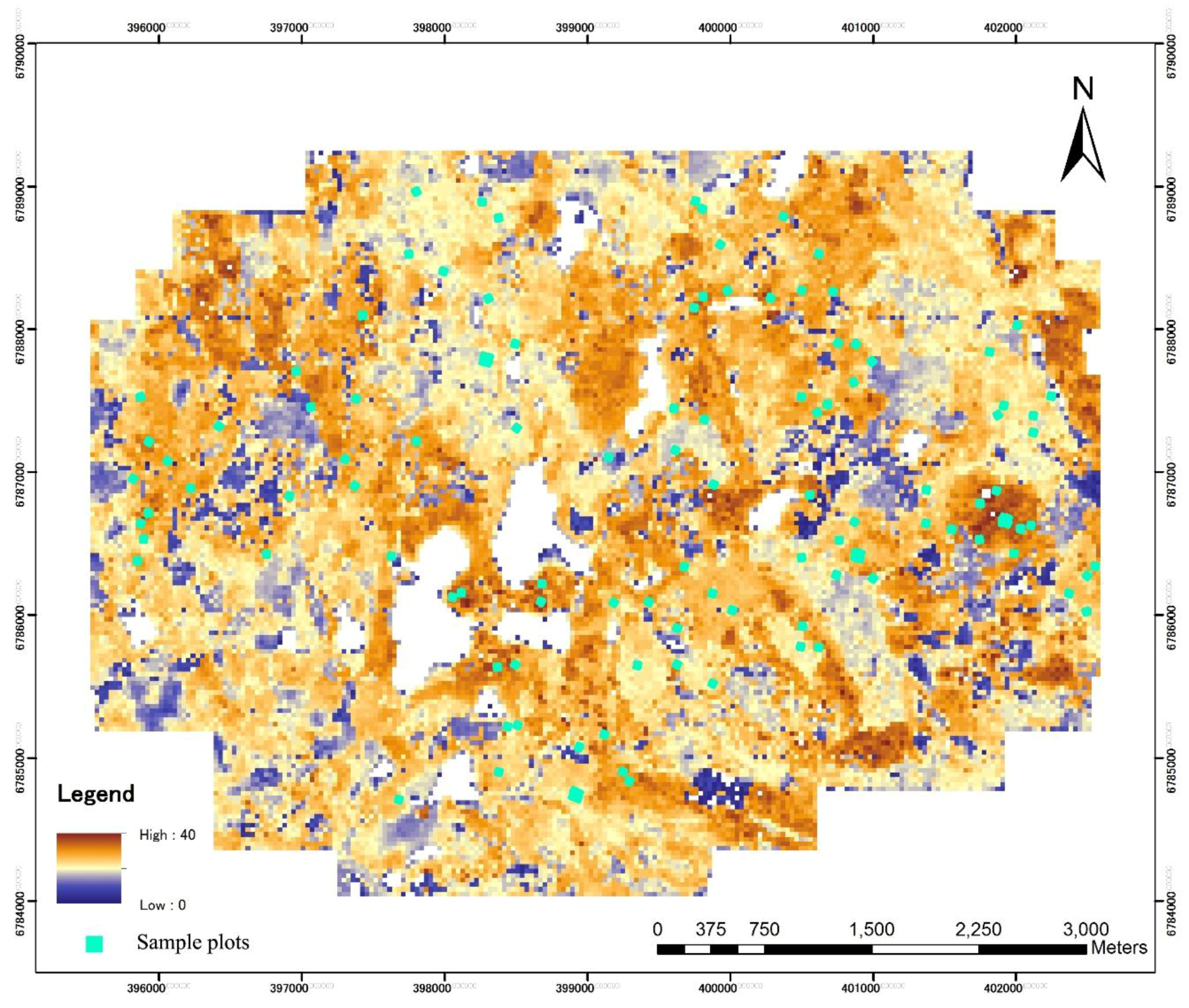
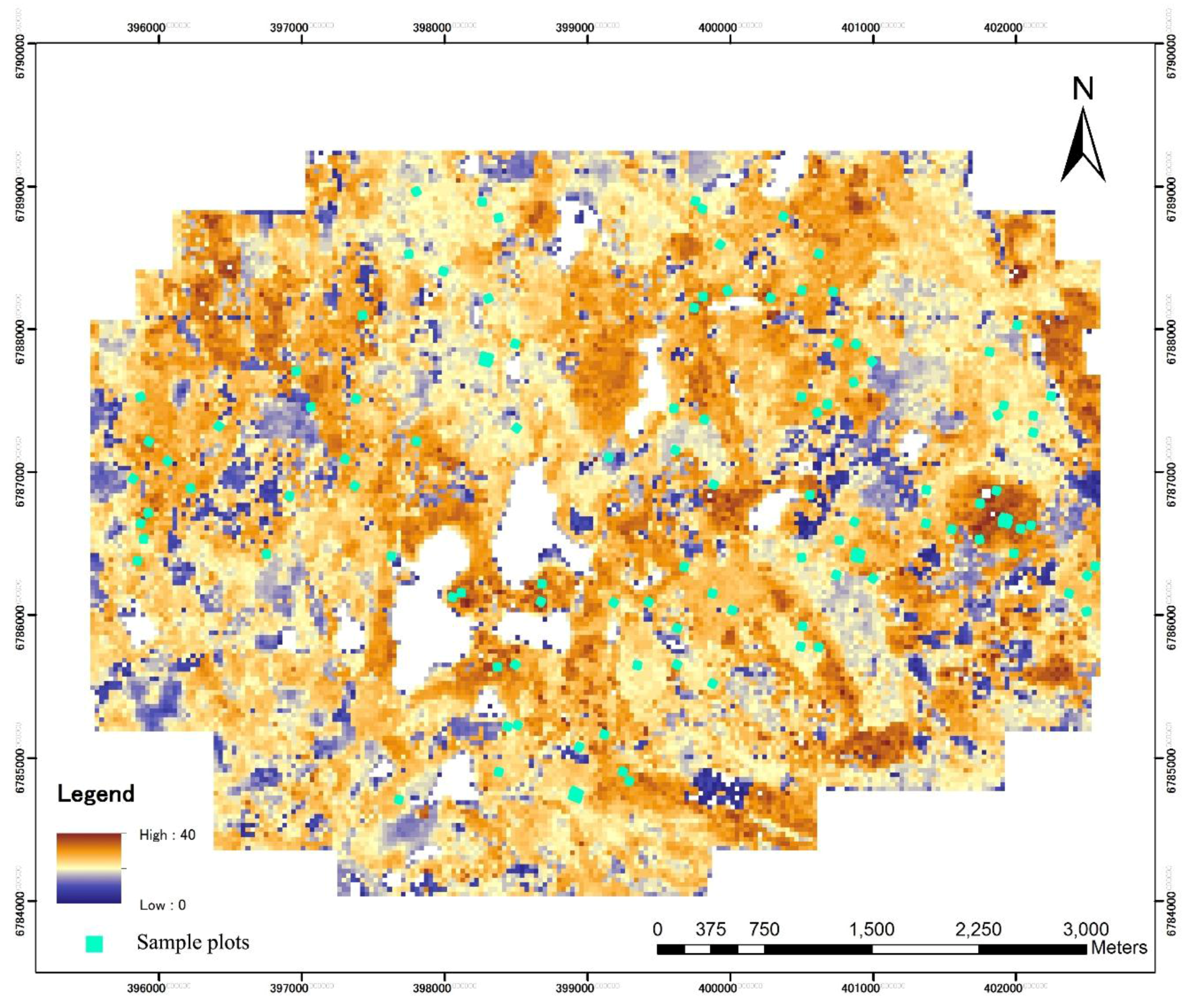
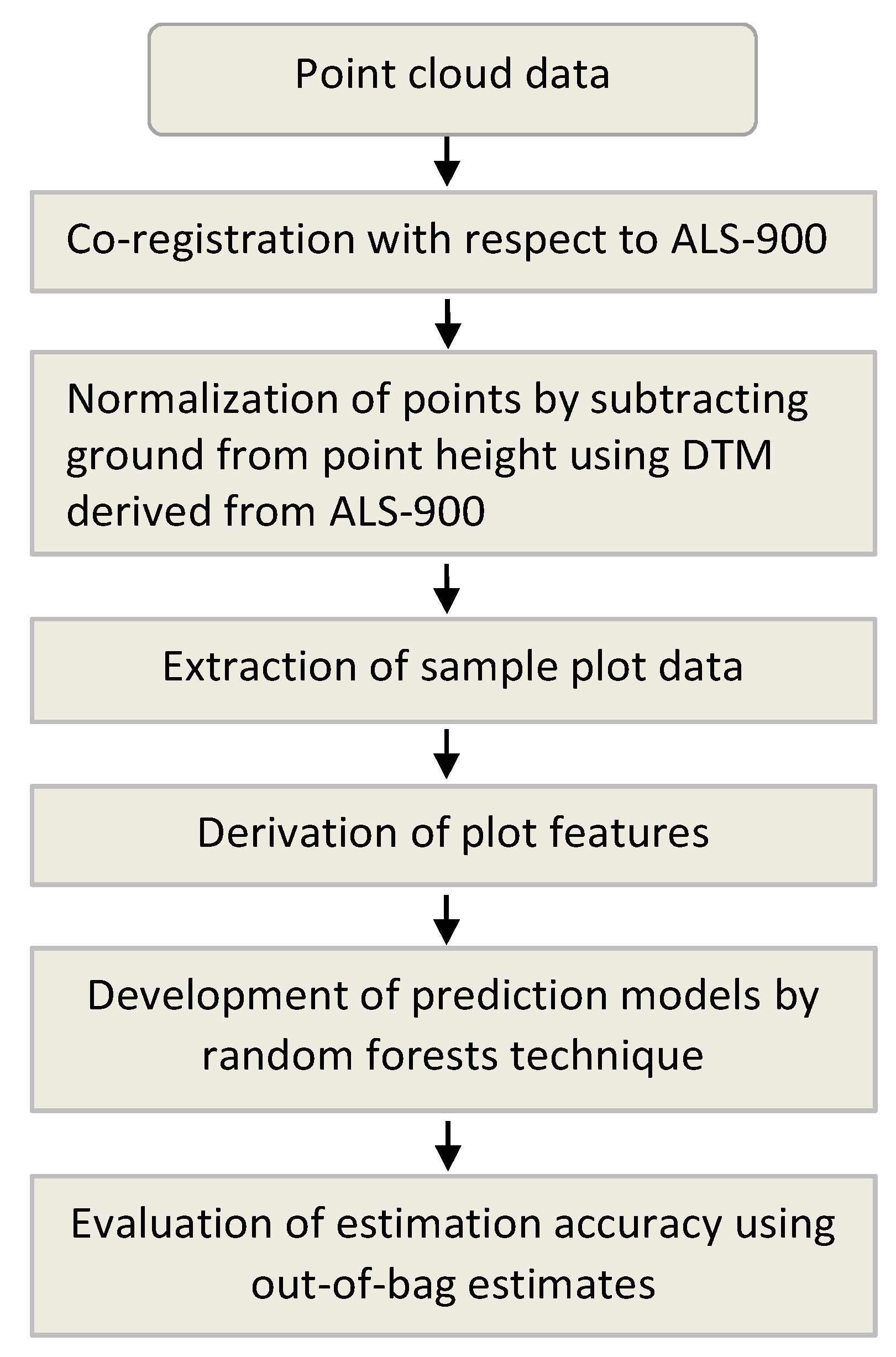
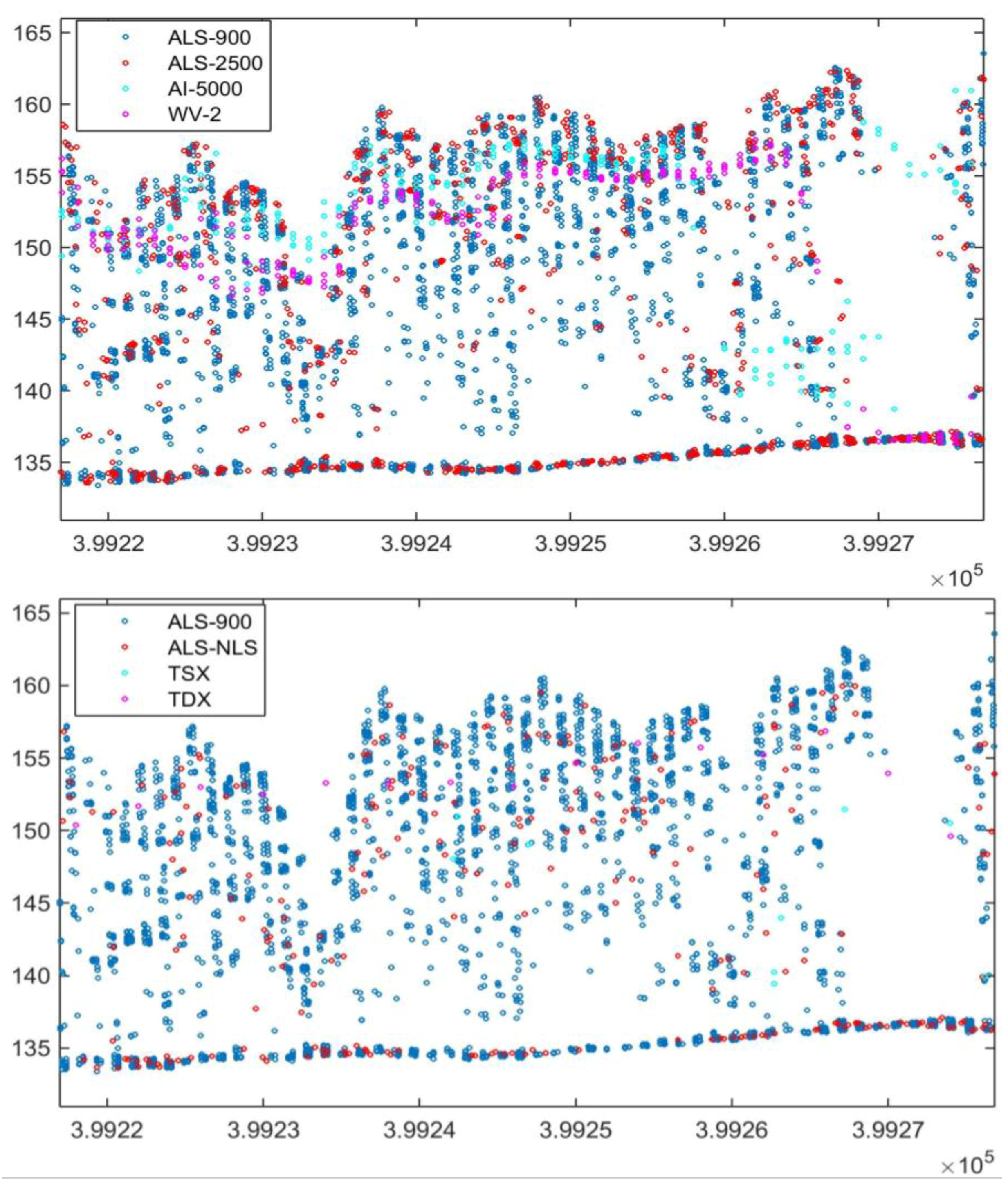
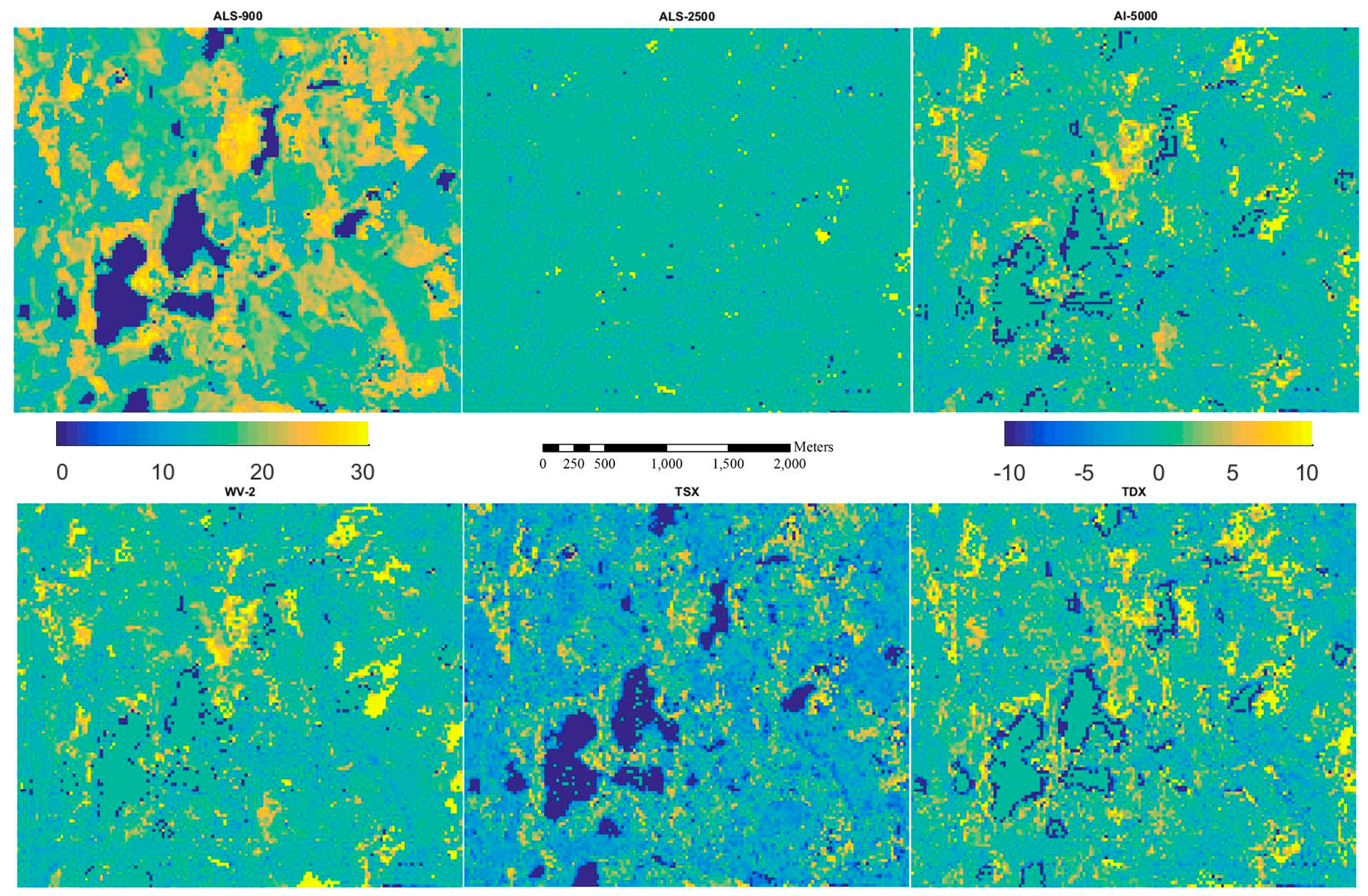
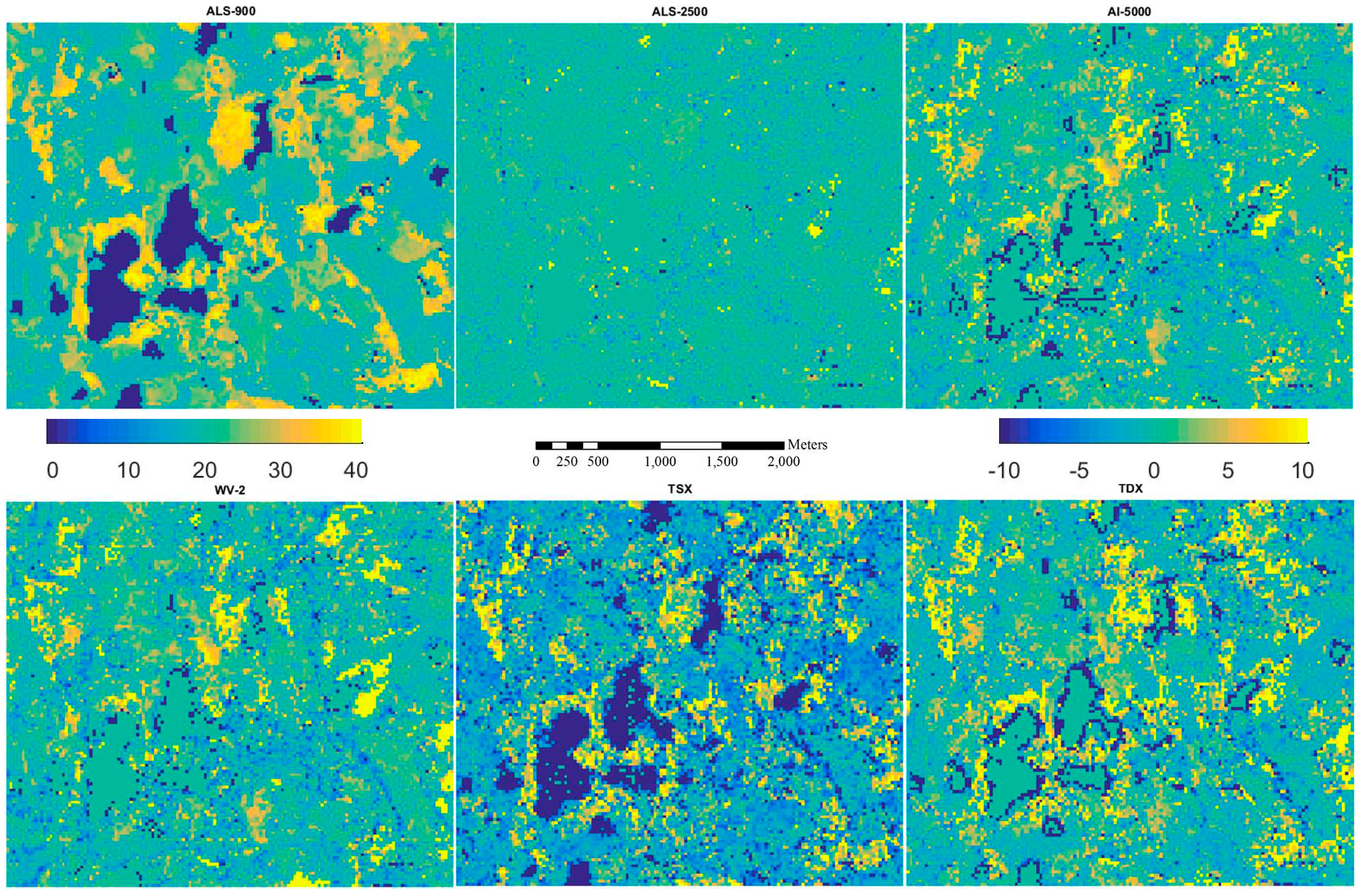
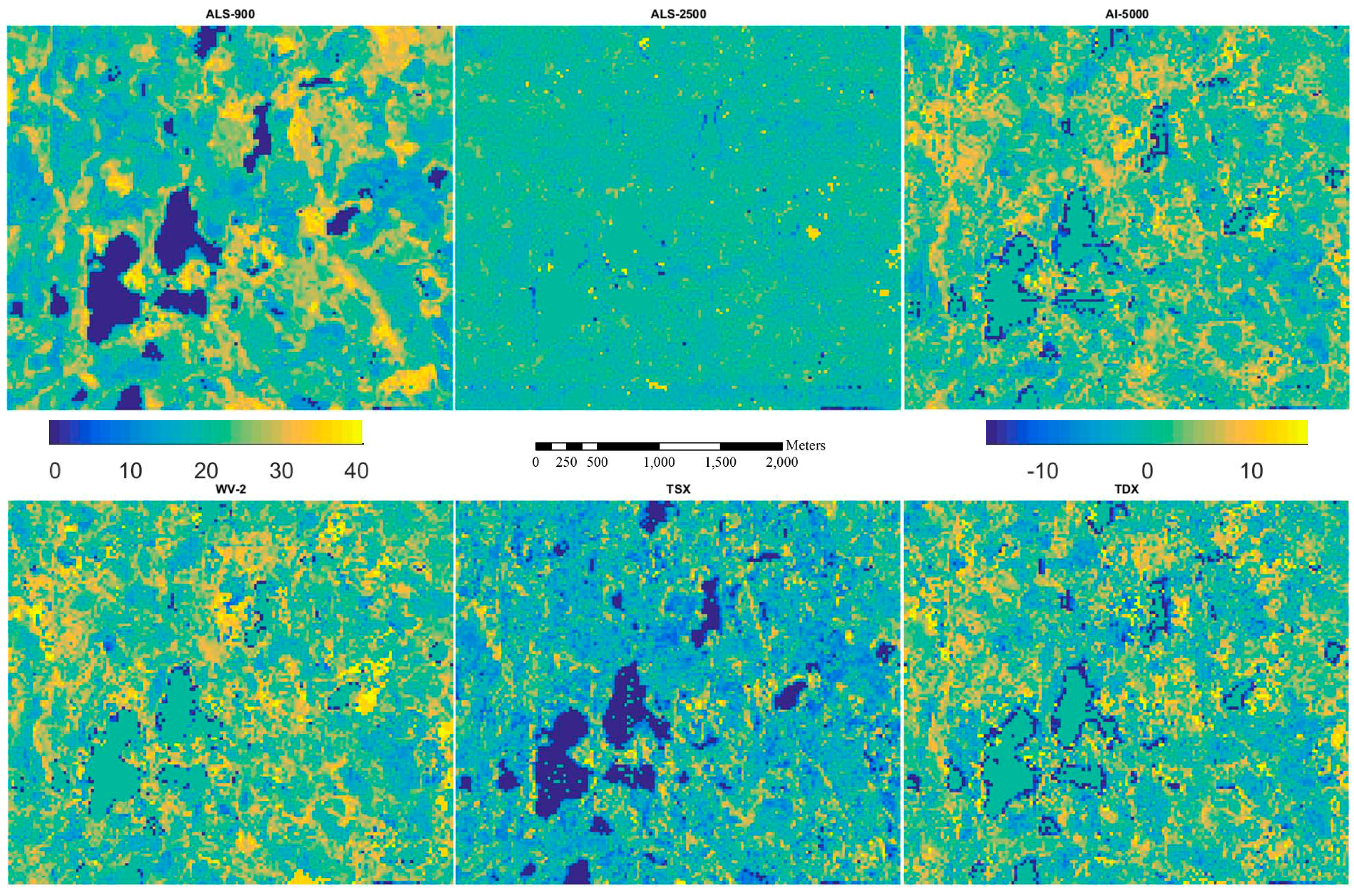
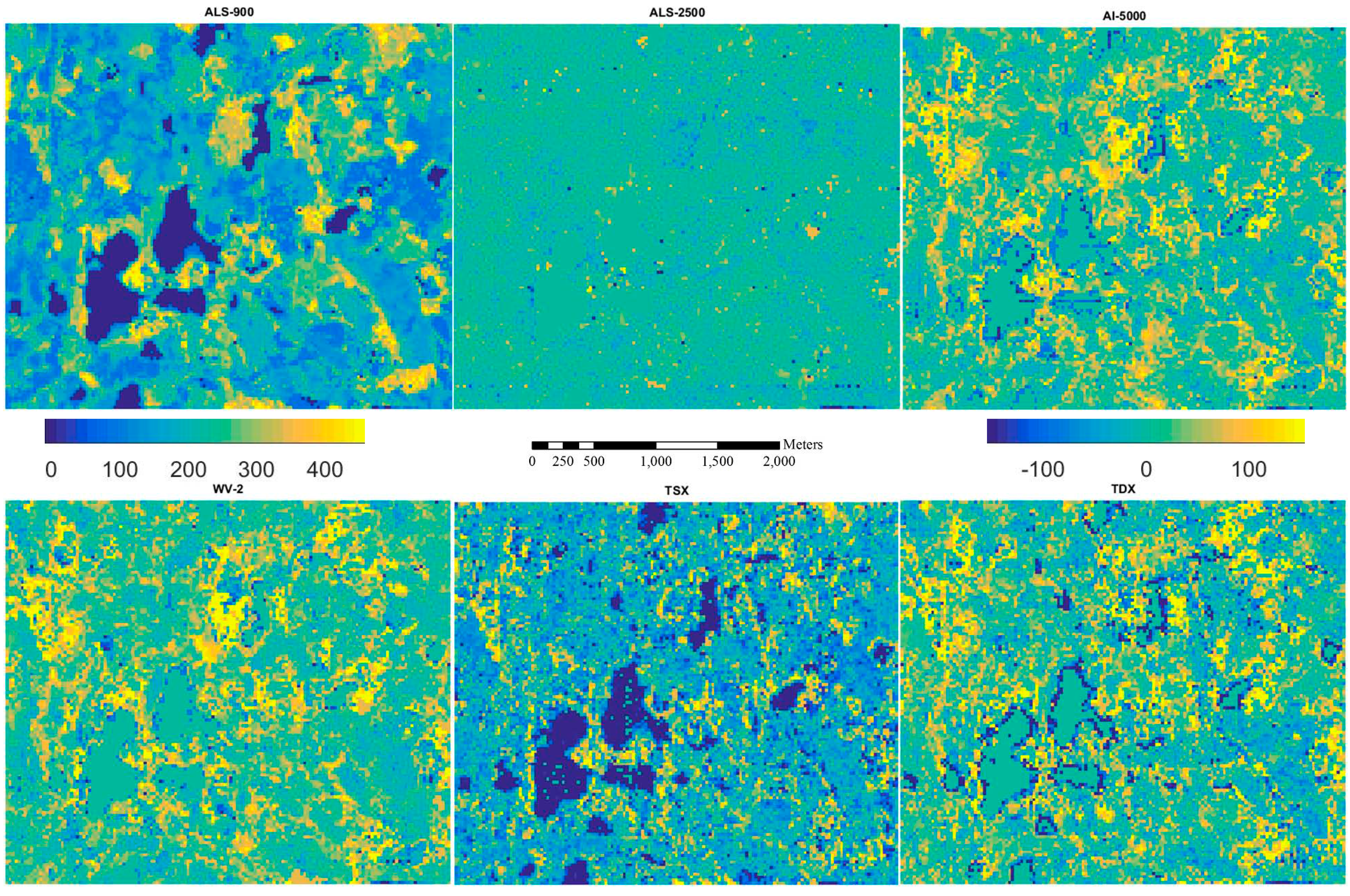
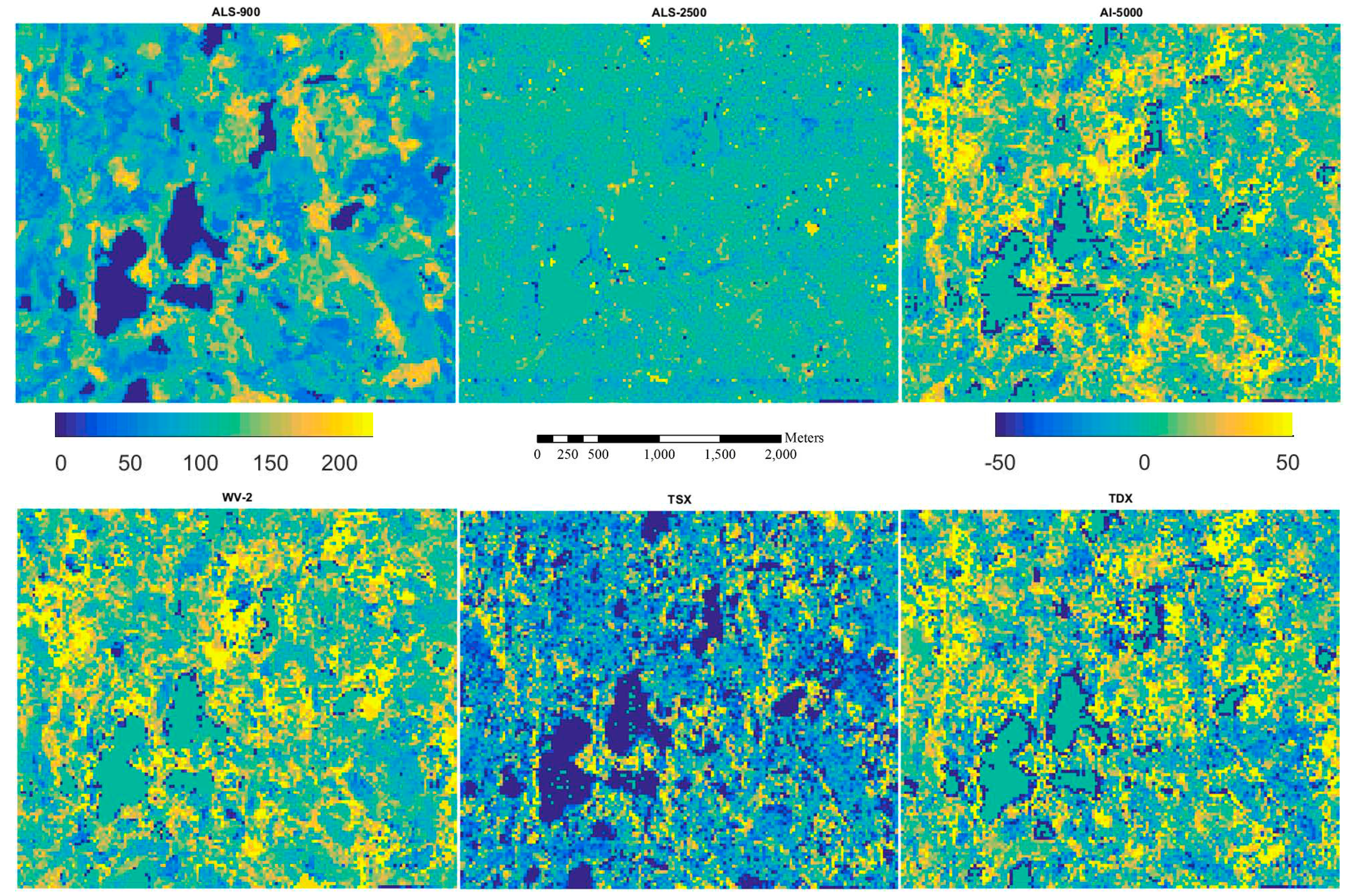
The combination of increasing spatial resolution and availability of 3D techniques has increased the ability to obtain vegetation information and monitor the changes. In principal, the image-based point clouds, either coming from optical images or SAR images, could be used for estimations of forest inventory attributes in a fashion analogous to ALS data, i.e., point cloud processing. However, the performance of point cloud produced by 3D techniques for the retrieval of forest inventory attributes has not been studied intensively. Most of the studies have been conducted in different test sites, and the differences in forest structure dominate the difference in the results. Therefore, there is a need to compare the capabilities of different point clouds generated in the same test site. In this study, we compared performance of 3D point cloud measured from very high resolution space-borne and airborne imagery and ALS point cloud for their capabilities in retrieval of forest inventory attributes in the area-based context. Remote sensing data used include TanDEM-X SAR Interferometry, TerraSAR-X SAR Data, WorldView-2 images, aerial images and ALS from different altitudes. The performance of 3D data was evaluated with 91 sample plots of size 32 m × 32 m and 16 m × 16 m in Evo, southern Finland.
5. Conclusions
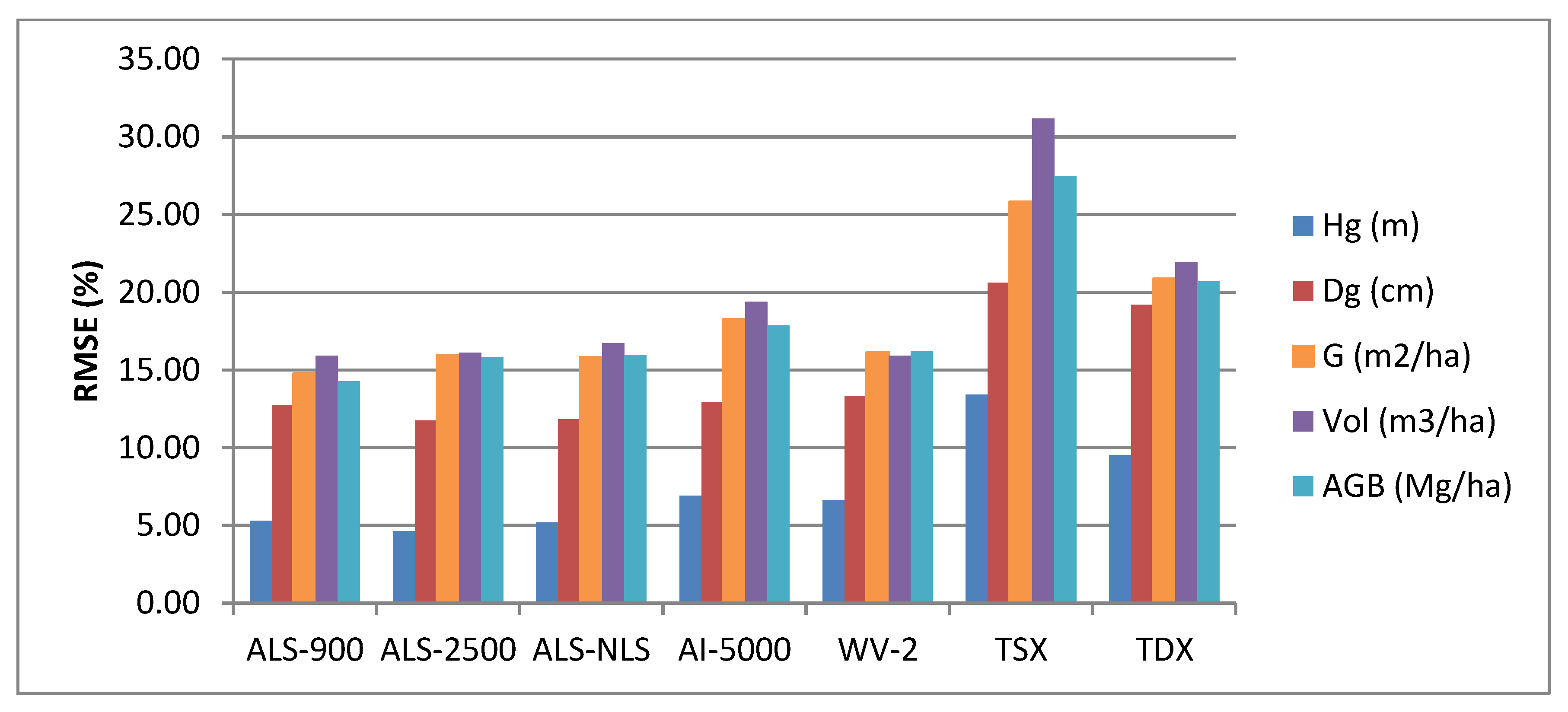
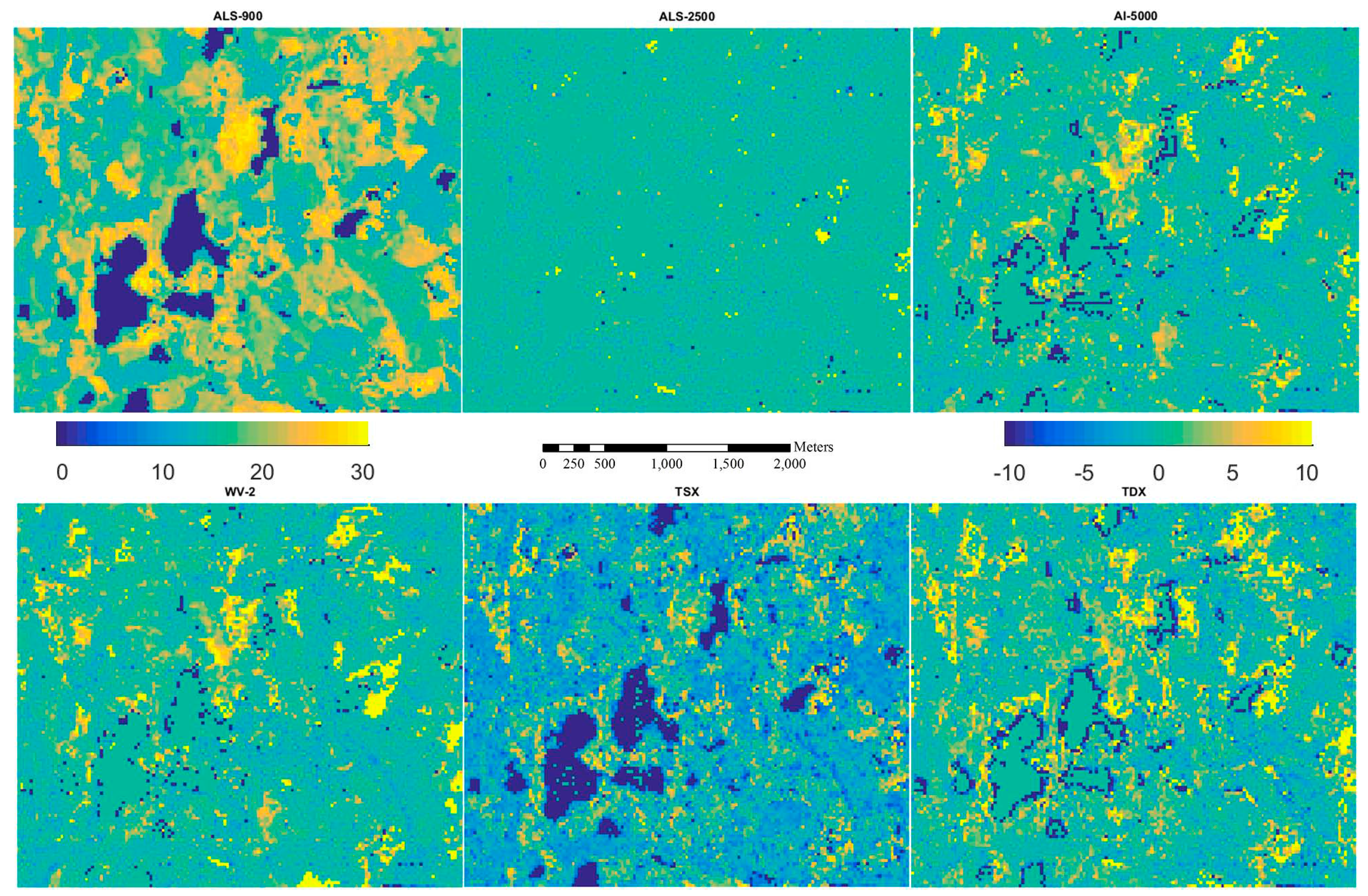
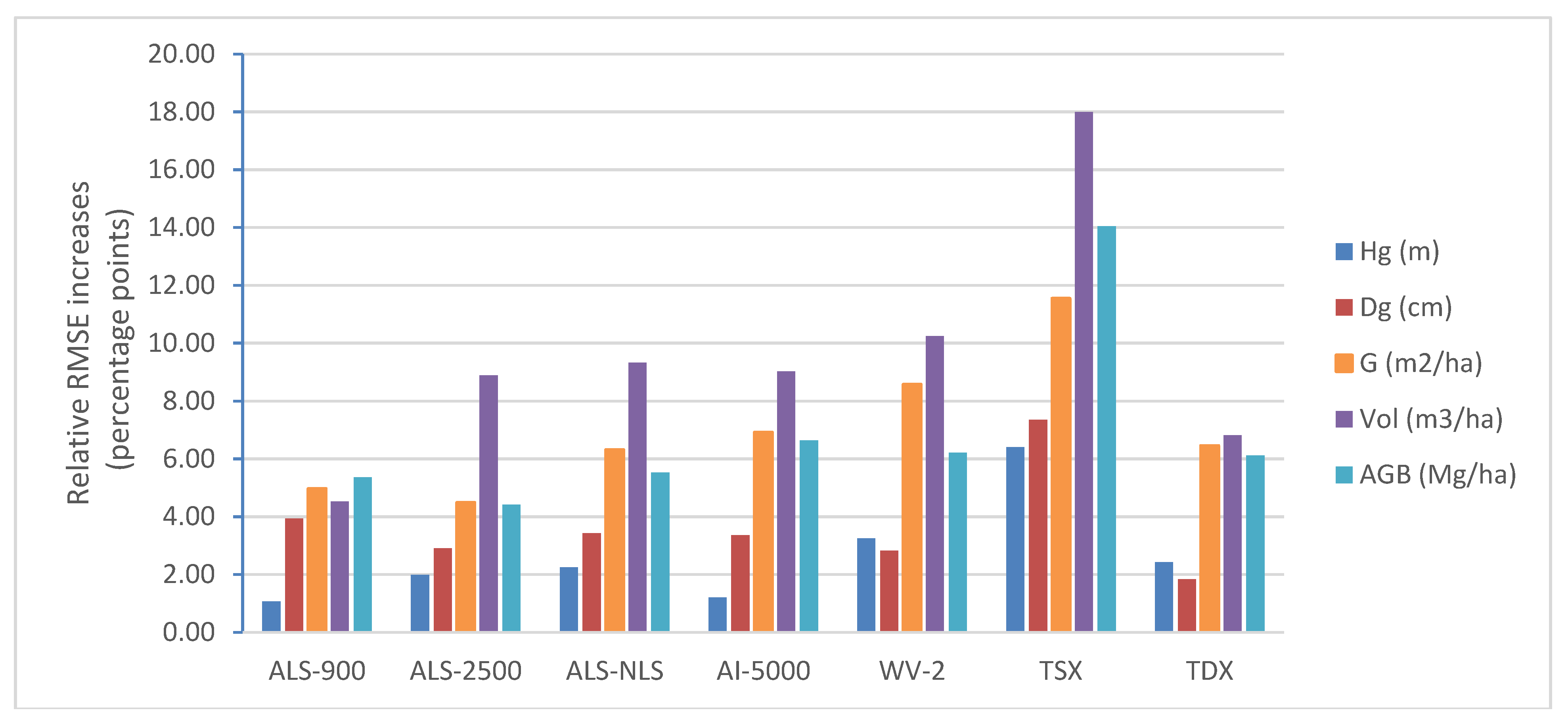
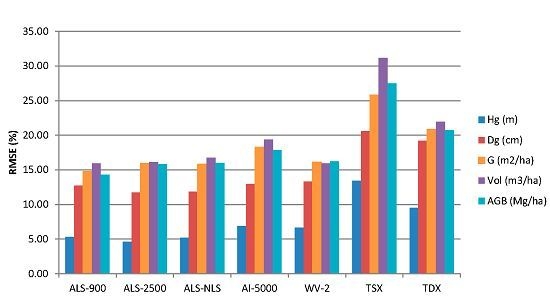
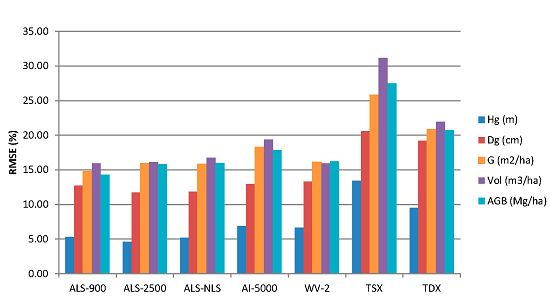
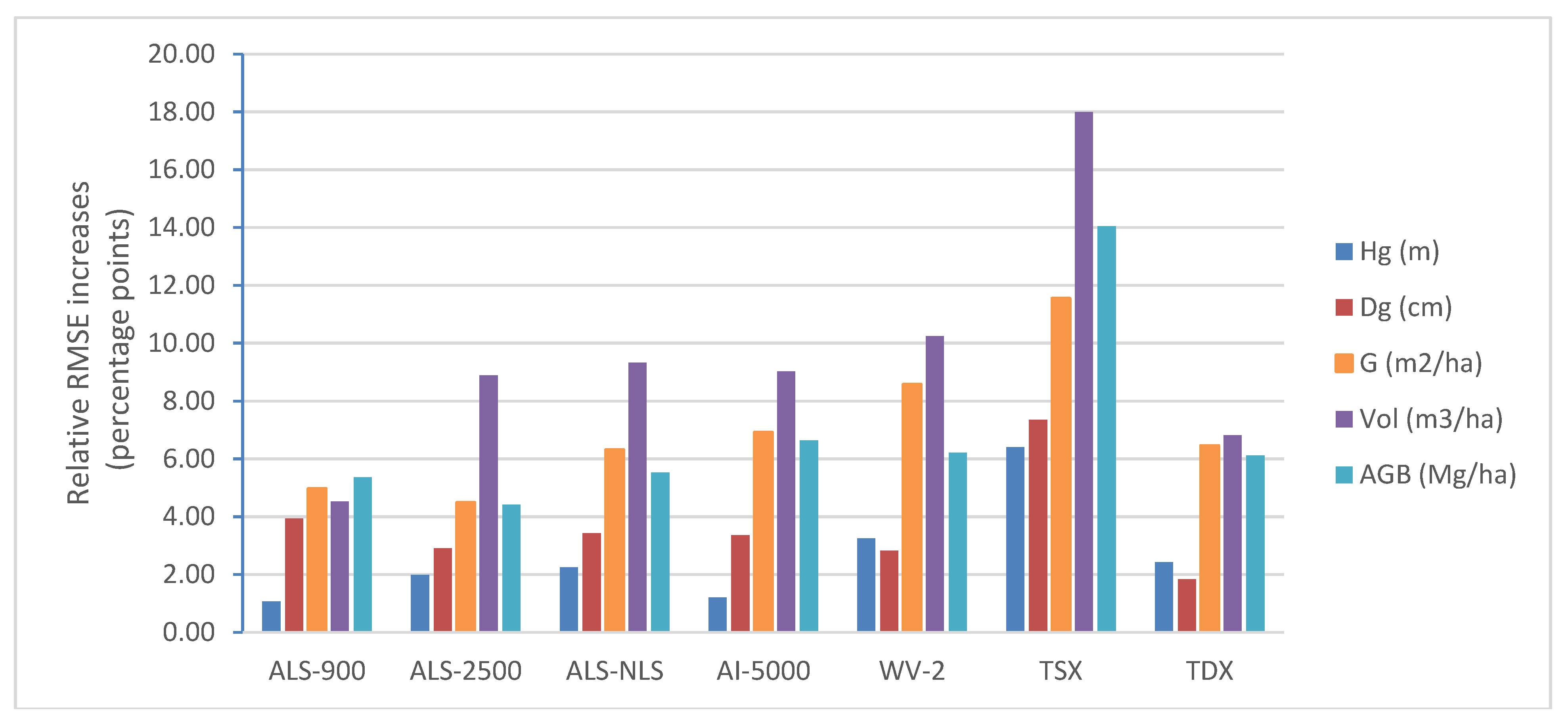
In this research, a comparison study was conducted to assess the explanatory power and information contents of several remote sensing data sources (laser scanning data, aerial images, WorldView-2 satellite images, SAR and InSAR) and methods providing 3D point clouds for the retrieval of plot level AGB, VOL, G, Dg and Hg. Results presented in this study showed that both space-borne and airborne 3D point clouds can be used for forest attribute mapping inventories. The relative RMSEs achieved were 4.6%–13.4% for Hg, 11.7%–20.6% for Dg, 14.8%–25.8% for G, 15.9%–31.2% for VOL and 14.3%–27.5% for AGB, respectively, depending on the data used. Overall results showed that ALS data produce the most accurate estimates for forest inventory attributes when compared with 3D point clouds generated from stereo airborne images using dense matching and space-borne radar images using radargrammetry and interferometry. However, the point density of ALS data is higher than image-based data. It is expected that estimation accuracy could be further improved with image-based point clouds when image resolution, radiometry and viewing geometry are improved. For example, WorldView-3 panchromatic imagery with a resolution of 0.3 m could produce a denser point cloud than WorldView-2 images. Features used in this study were originally developed for ALS point clouds. However, due to the nature of image-based clouds, i.e., the most of the points are created following the envelope of canopy, new features should be exploited in the future study although current set of the features performed well. When image-based data were compared, high altitude aerial images and WorldView-2 satellite images gave similar results, which were comparable to those obtained with ALS data. It seems that Interferometric SAR contains more information than radargrammetry SAR. Based on the analysis of plot size impact, we recommend predicting forest inventory attributes at a resolution greater than 500 m2 when using image-based point clouds to achieve an acceptable accuracy level.
The major advantage of space-borne images, compared with airborne images or ALS, has been their availability and larger coverage. In the past, the saturation that occurs with higher biomass have restricted the use of optical and radar data in forest mapping. The results presented in this paper confirms usefulness of combination of airborne/space-borne images and 3D techniques as an option in developing methods for operational inventory and monitoring of large areas of forest attributes with improved accuracy and more frequent inventory cycles. Therefore, these alternative 3D techniques will be increasingly used supplementary to ALS in forest mapping and monitoring applications requiring high spatial accuracy at regional and country levels. It is anticipated that many of the future remote sensing processes for forestry will be based on 3D point cloud processing since canopy height information from forest is the main parameter remotely sensed data can provide for forest measurements. With its capability of penetration into the canopy, ALS is now the primary technique that is used for acquiring 3D information of vegetation, but other 3D techniques can be used to create forest attribute maps with accuracy close to ALS after high-quality DTM (created with ALS) exists from the areas of interest. When selecting the optimal data source, the costs of the data acquisition and of data preprocessing has to be taken into account in addition to the 3D point cloud processing costs, which is common to all of them. With the information of the expected accuracy, costs and availability of the data, foresters can select optimal/appropriate dataset for their purposes.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}