
Relief Effects on the L-Band Emission of a Bare Soil


Abstract
:
1. Introduction
2. Experimental Setup and Measurements
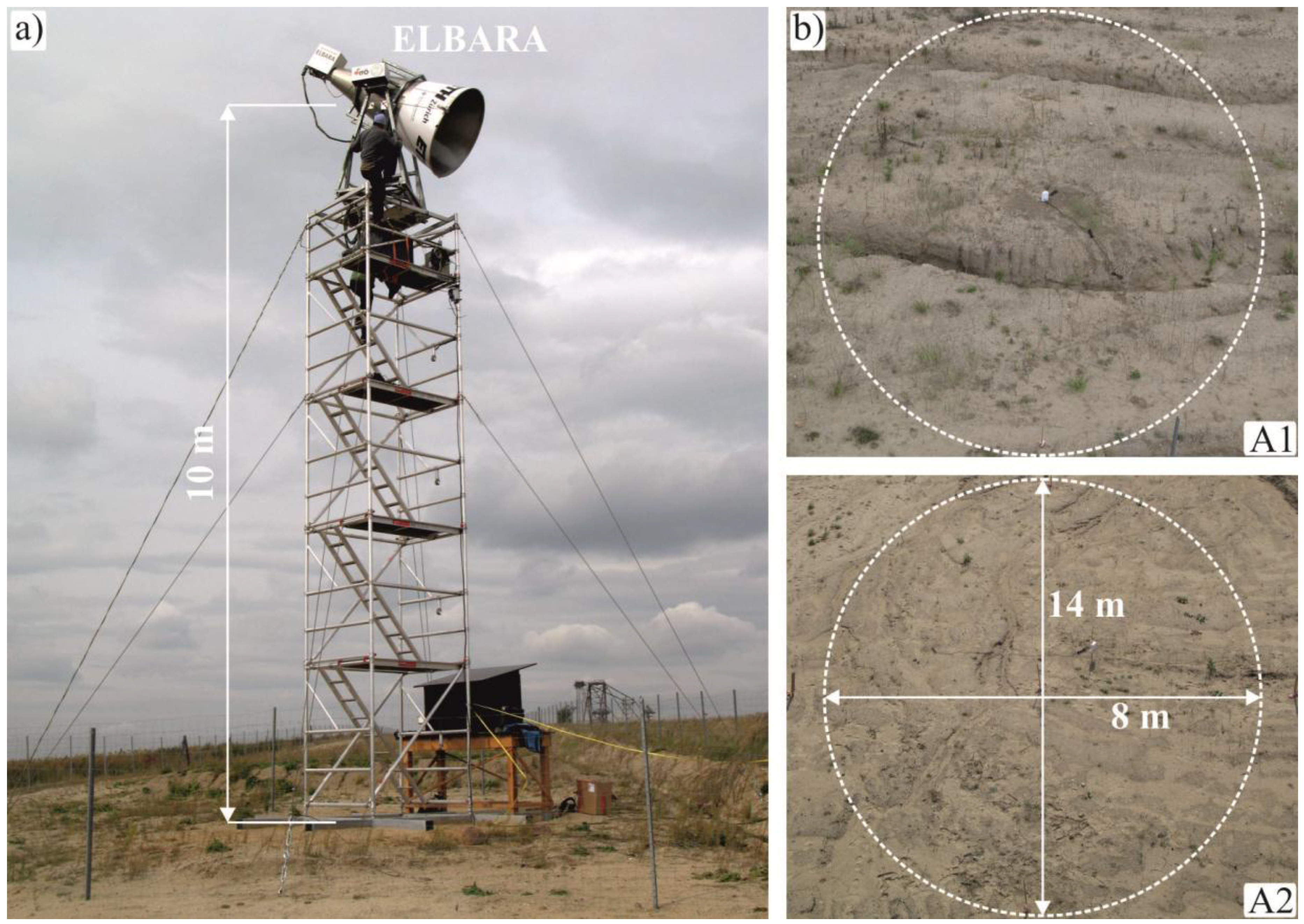
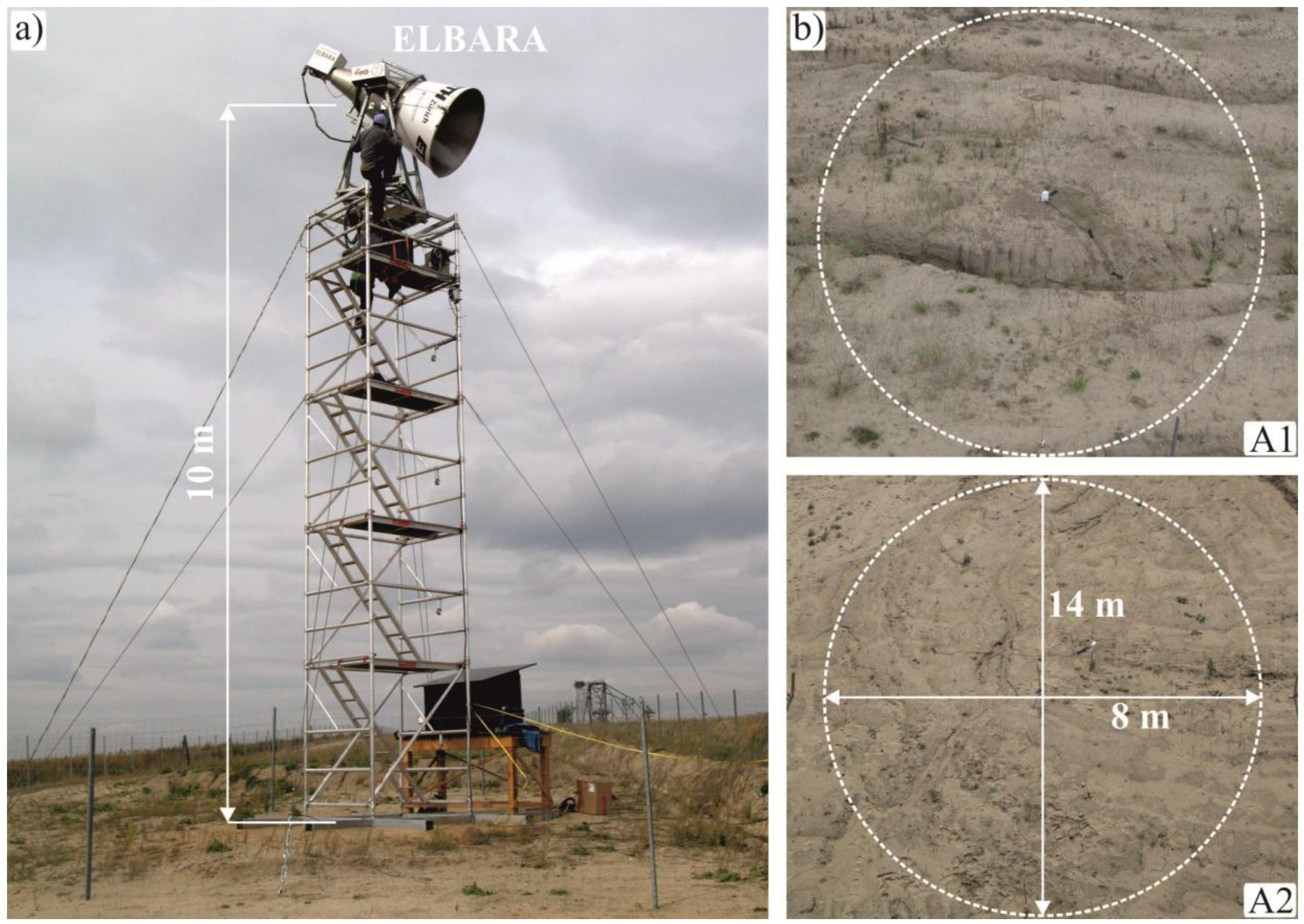
2.1. Investigation Area and General Setup
2.2. Brightness-Temperature Measurements
2.3. Hydrometeorological and in situ Soil Measurements
2.4. Topography Measurements
3. Brightness-Temperature Simulations
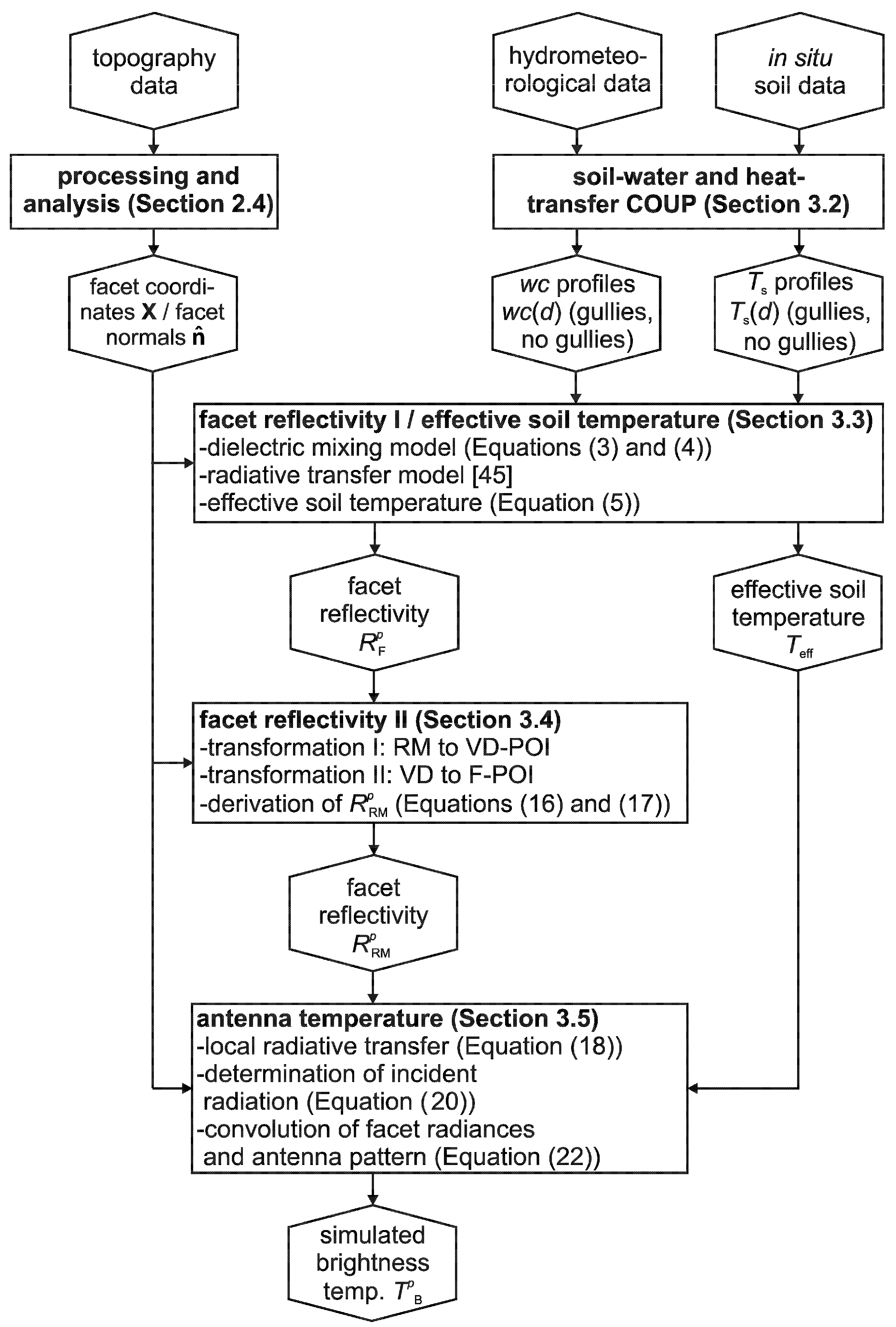
3.1. General Modeling Approach
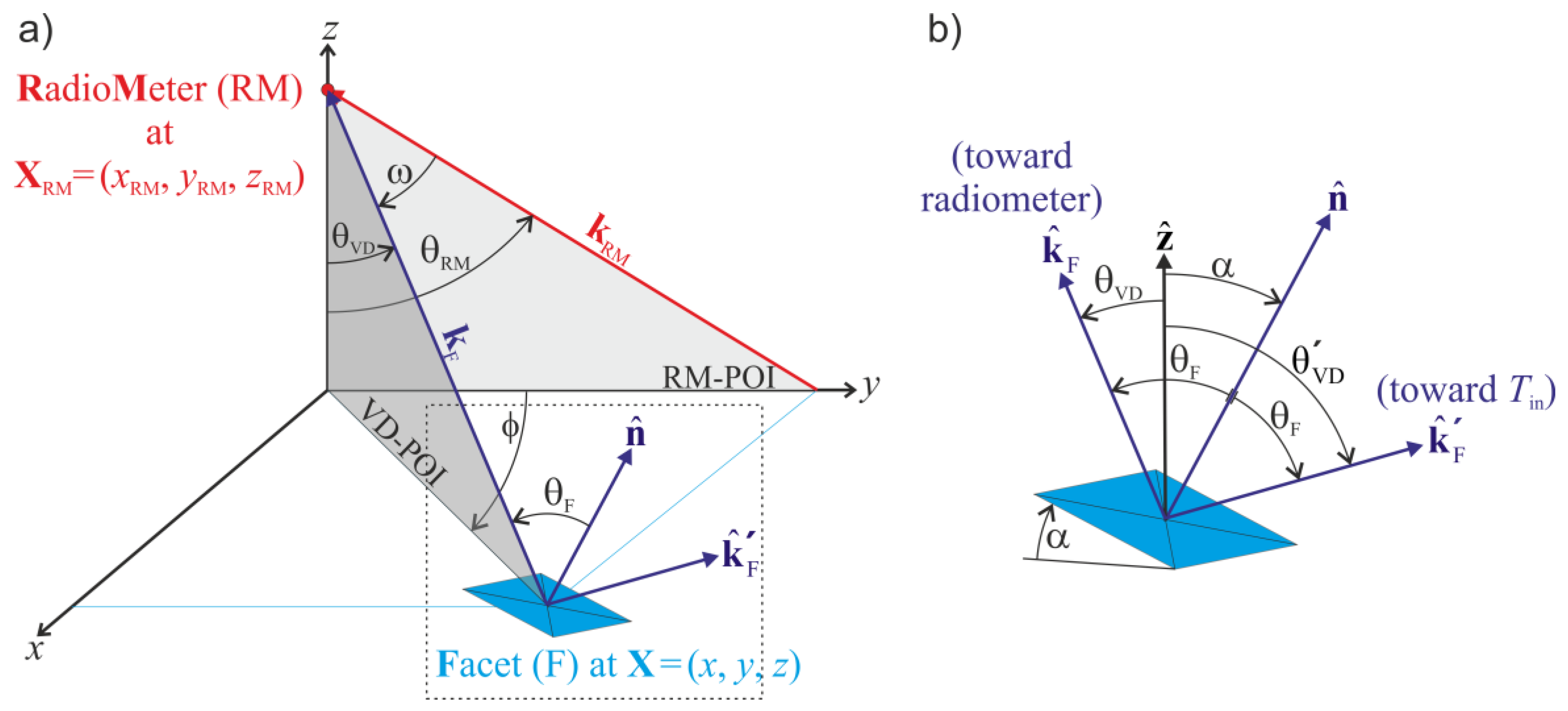
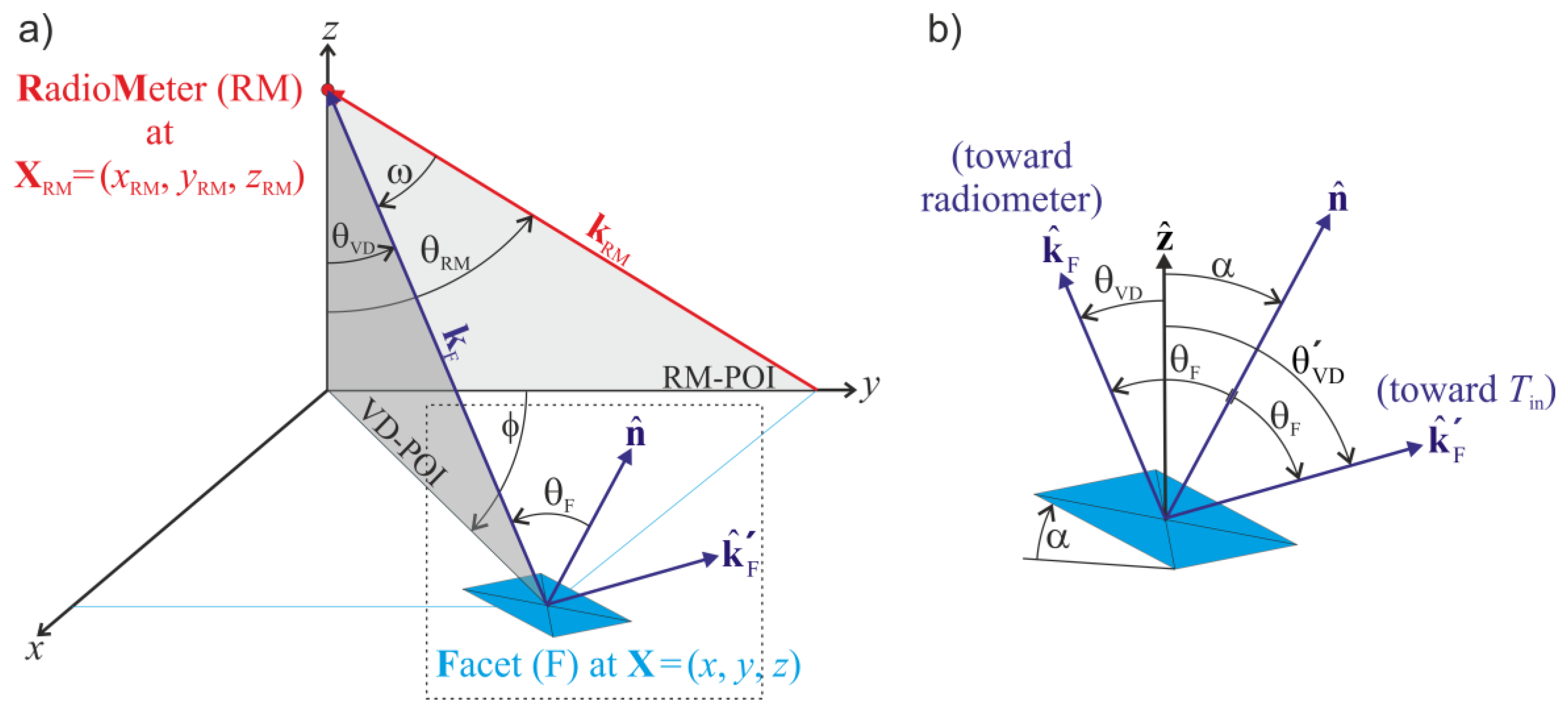
- The RadioMeter Plane Of Incidence (RM-POI) is normal to the xy-plane, and comprises the antenna main axis kRM. Hence, it is spanned by the two unit vectors and the vertical ẑ = (0, 0, 1). The corresponding radiometer elevation angle θRM = 55° is the nadir angle of the antenna main axis.
- The View-Direction Plane Of Incidence (VD-POI) of a Facet (F) is also normal to the xy-plane, but is spanned by the two unit vectors and ẑ, and is thus rotated in azimuth by the angle ϕ with respect to the RM-POI. The corresponding view-direction elevation angle θVD is the angle at which a facet is seen from the radiometer, and is given by the scalar product:
- The local or Facet Plane Of Incidence (F-POI) is normal to the facet’s surface and is spanned by and the facet’s surface normal . The corresponding facet elevation angle θF is the incidence angle of radiation incident on a facet that is reflected in the specular direction toward the radiometer. It is given by:and thus deviates from θVD for facet tilt angles α ≠ 0°.
3.2. Soil-Water Content and Soil-Temperature Profiles

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soil Depth (m) | wcsat(m3∙m−3) | Ψa (cm) | λp (−) | wcres (m3∙m−3) | ksata (mm∙d−1) | ksatb (mm∙d−1) |
|---|---|---|---|---|---|---|
| 0–0.06 | 0.27 | 15 | 0.60 | 0.055 | 200 | 50 |
| 0.06–0.30 | 0.31 | 15 | 0.60 | 0.055 | 2500 | 250 |
| 0.30–0.70 | 0.28 | 10 | 0.15 | 0.080 | 4000 | 400 |
| 0.70–3.00 | 0.26 | 10 | 0.15 | 0.082 | 3000 | 300 |
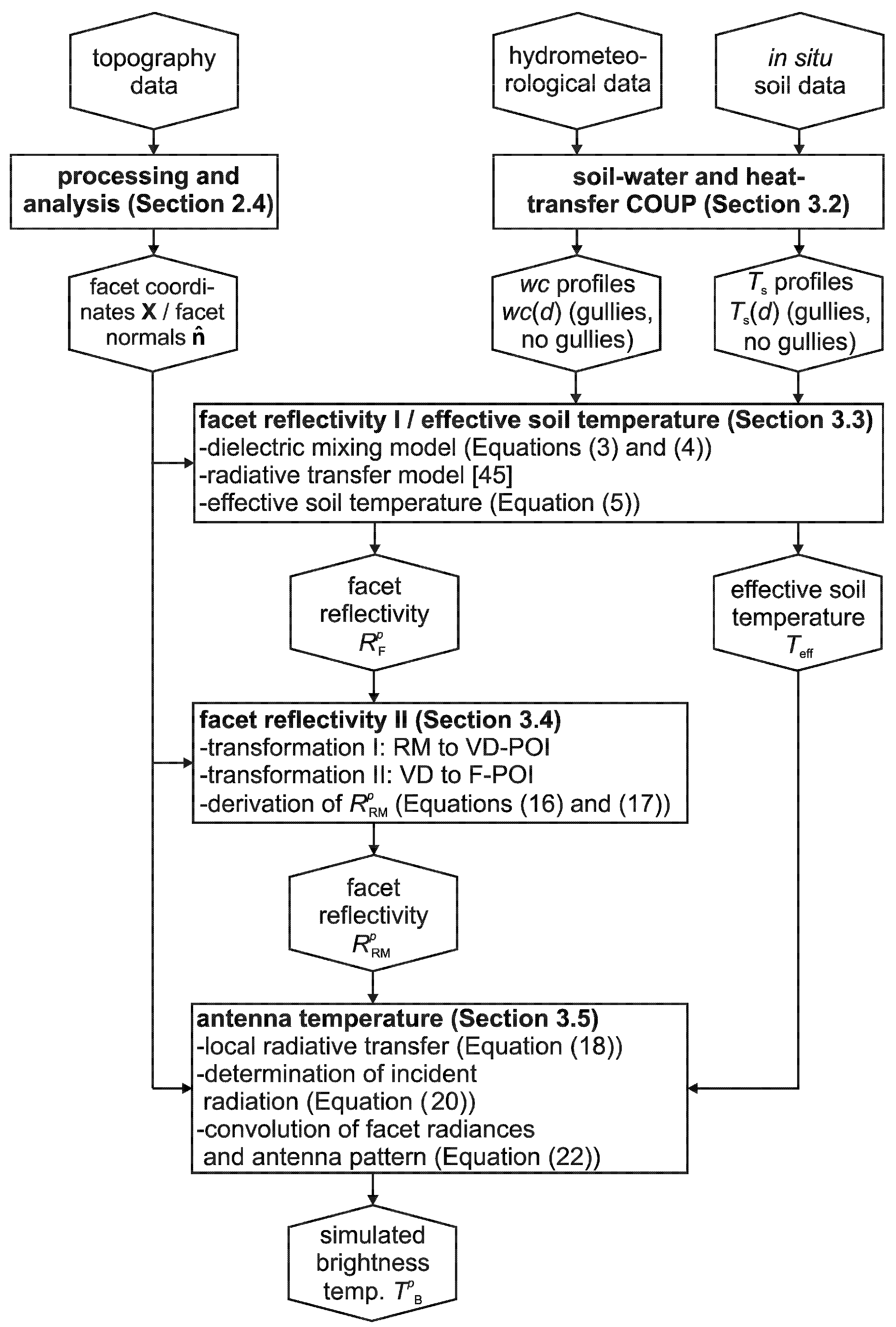
3.3. Facet Reflectivities with Respect to the F-POI and Effective Soil Temperatures
3.4. Facet Reflectivities with Respect to the RM-POI
3.4.1. Transformation I: RM-POI to VD-POI
3.4.2. Transformation II: VD-POI to F-POI
3.4.3. Derivation of
3.5. Antenna Brightness Temperature
4. Results
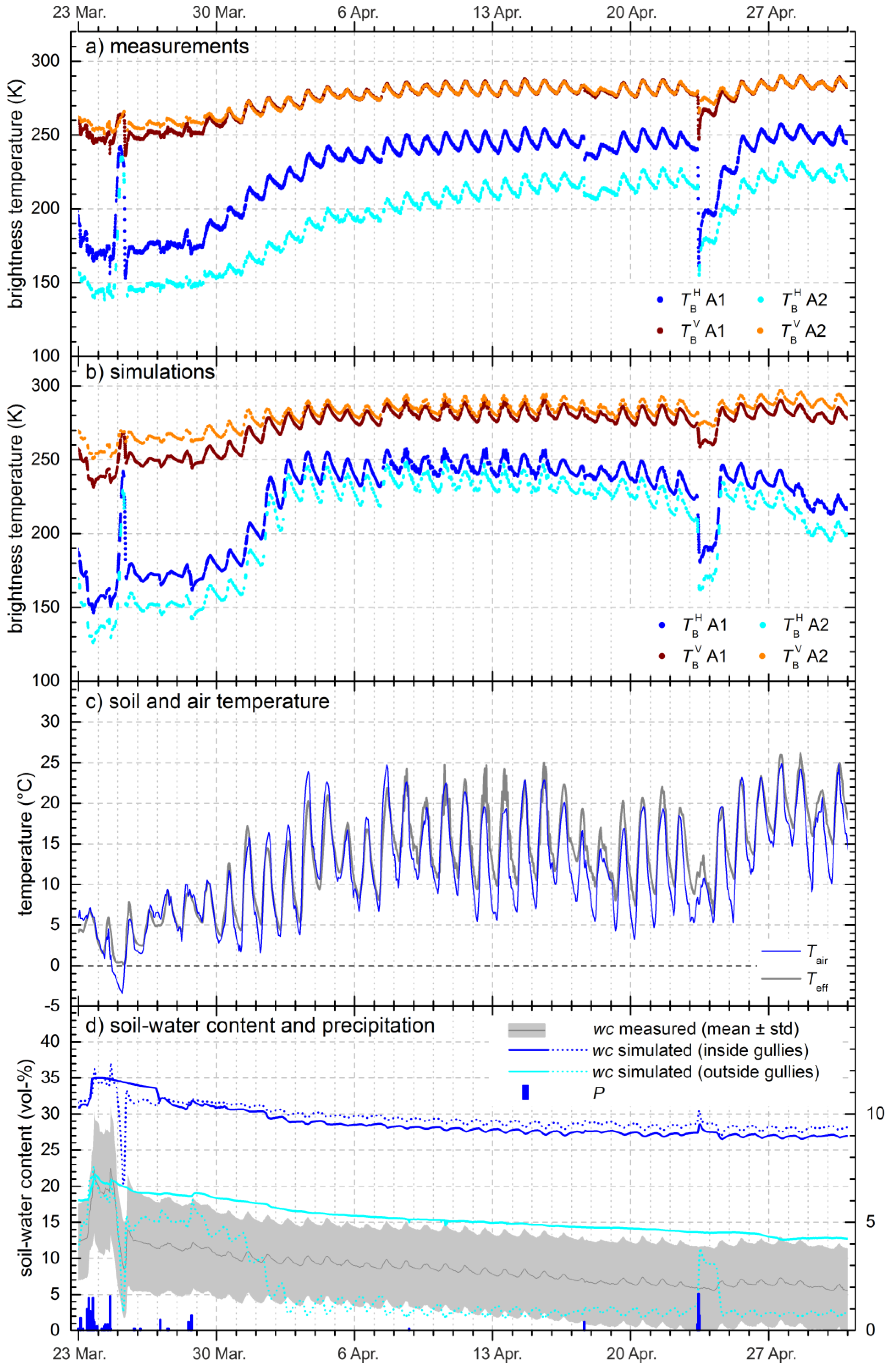
4.1. Meteorological Conditions
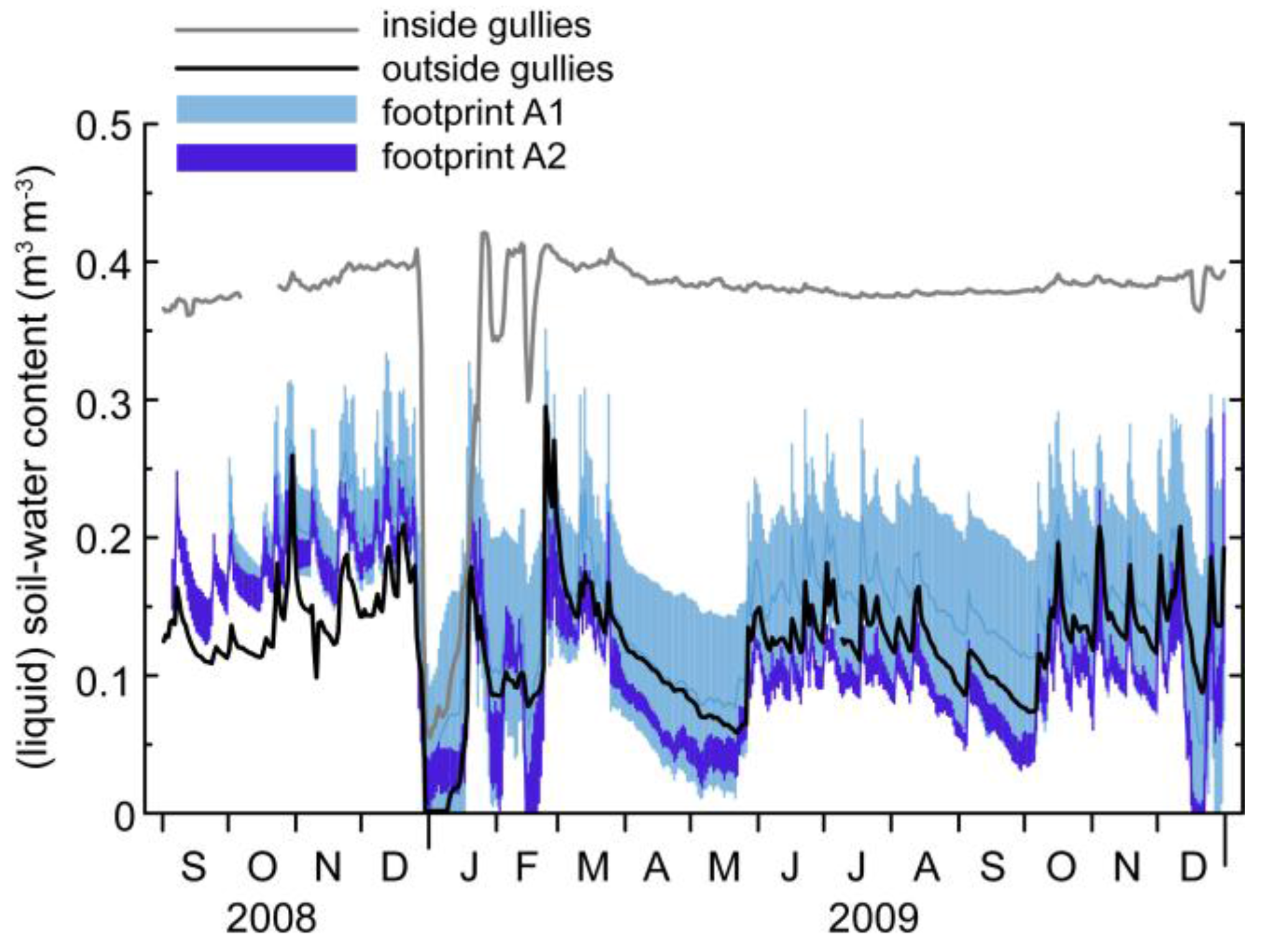
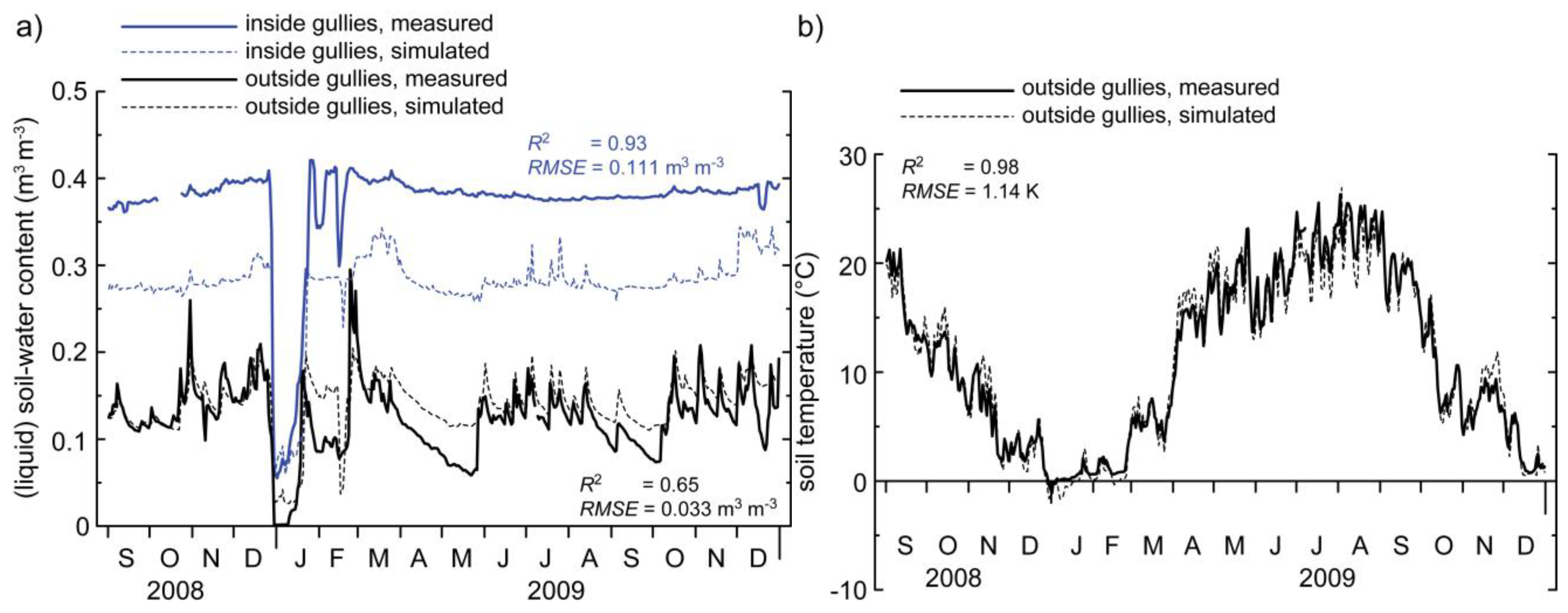
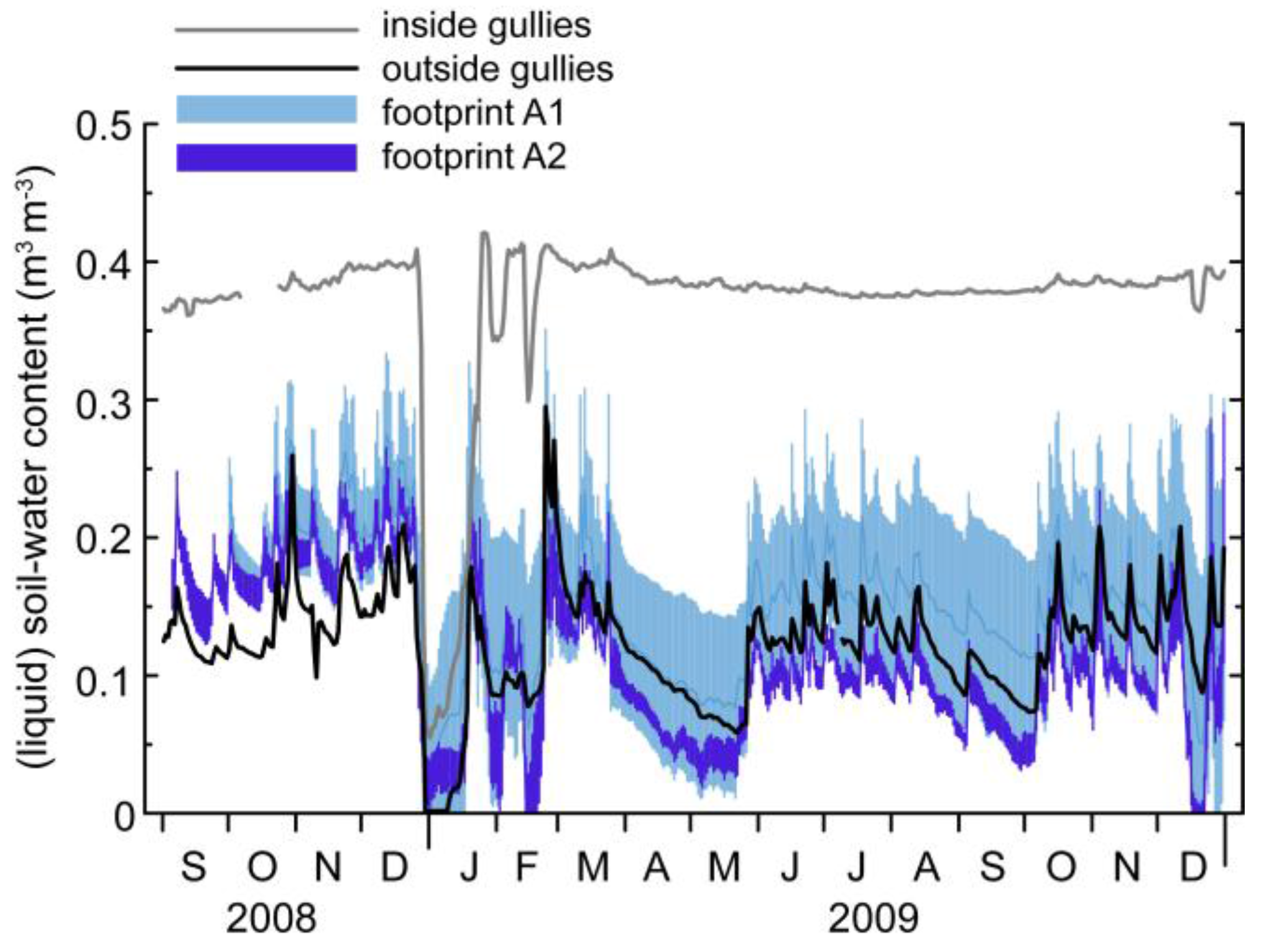
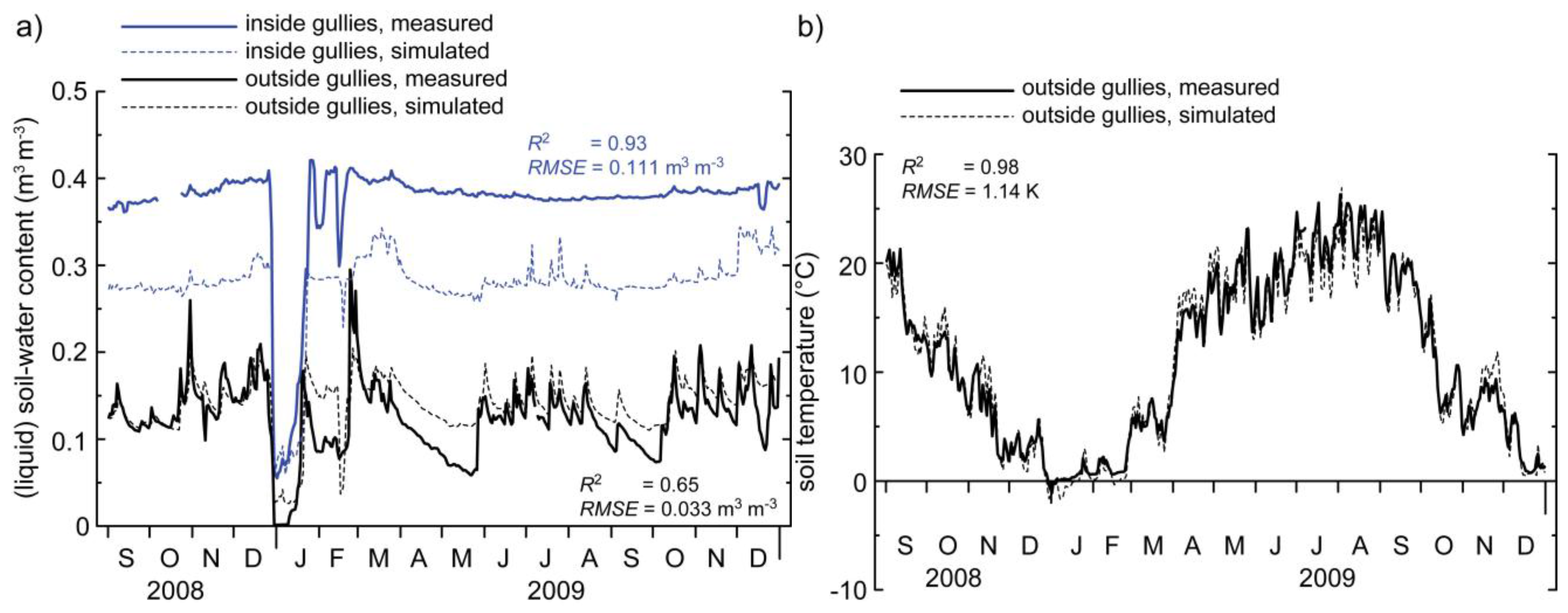
4.2. Measured and Simulated Soil-Water Content and Soil-Temperature Dynamics
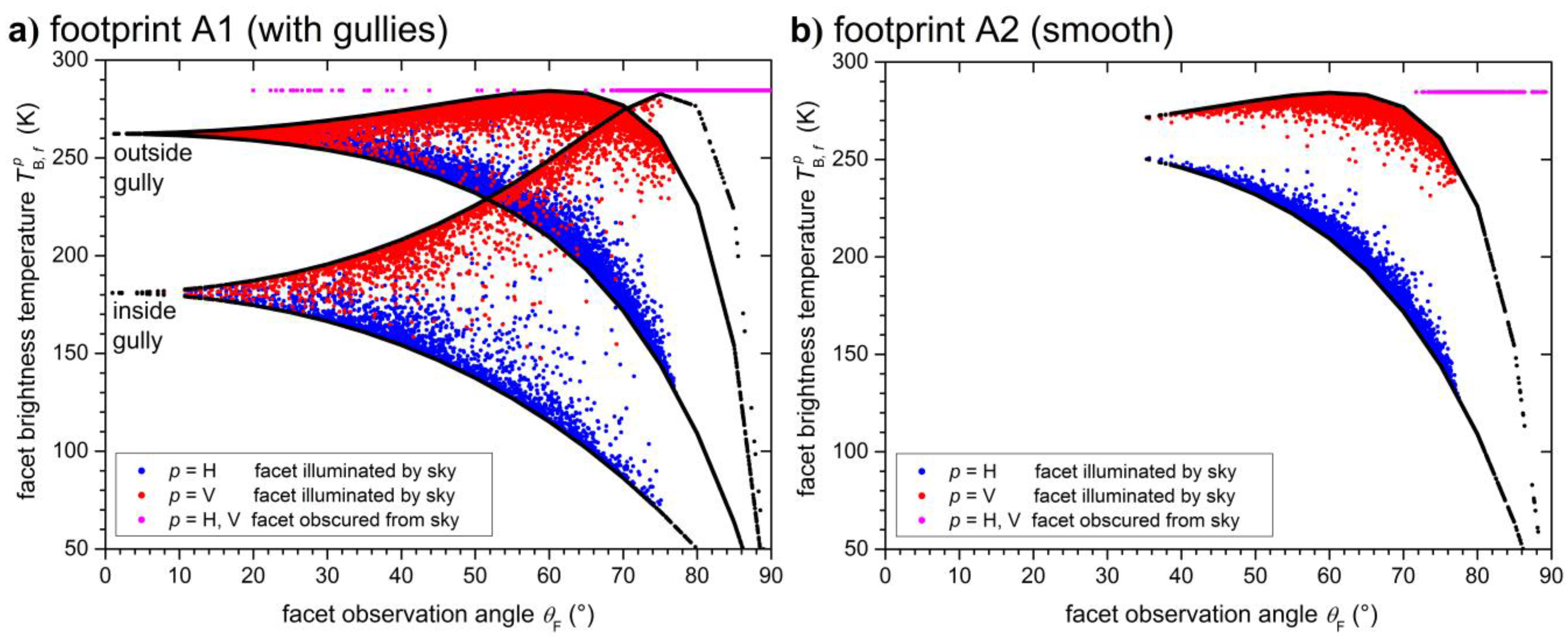
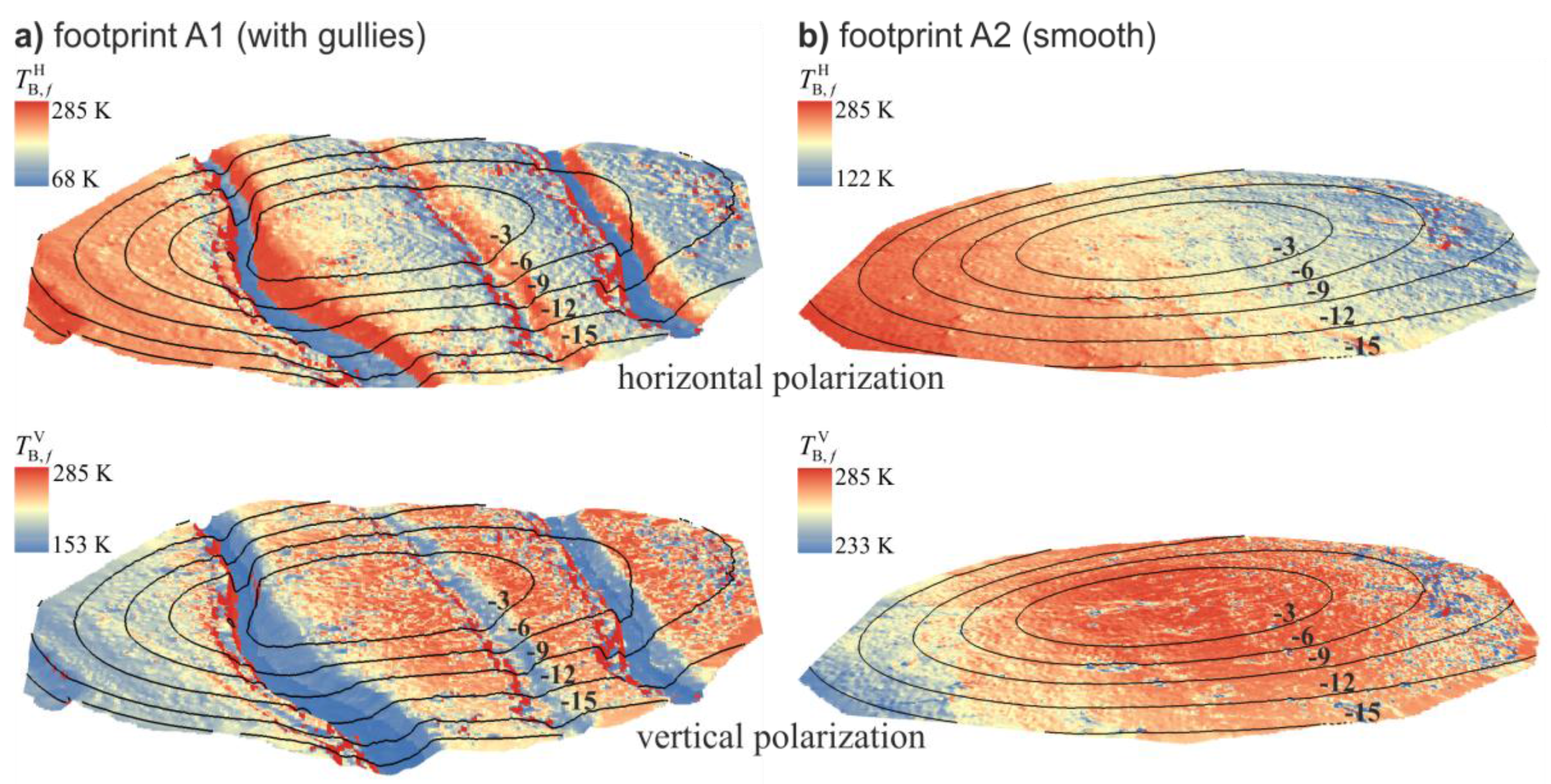
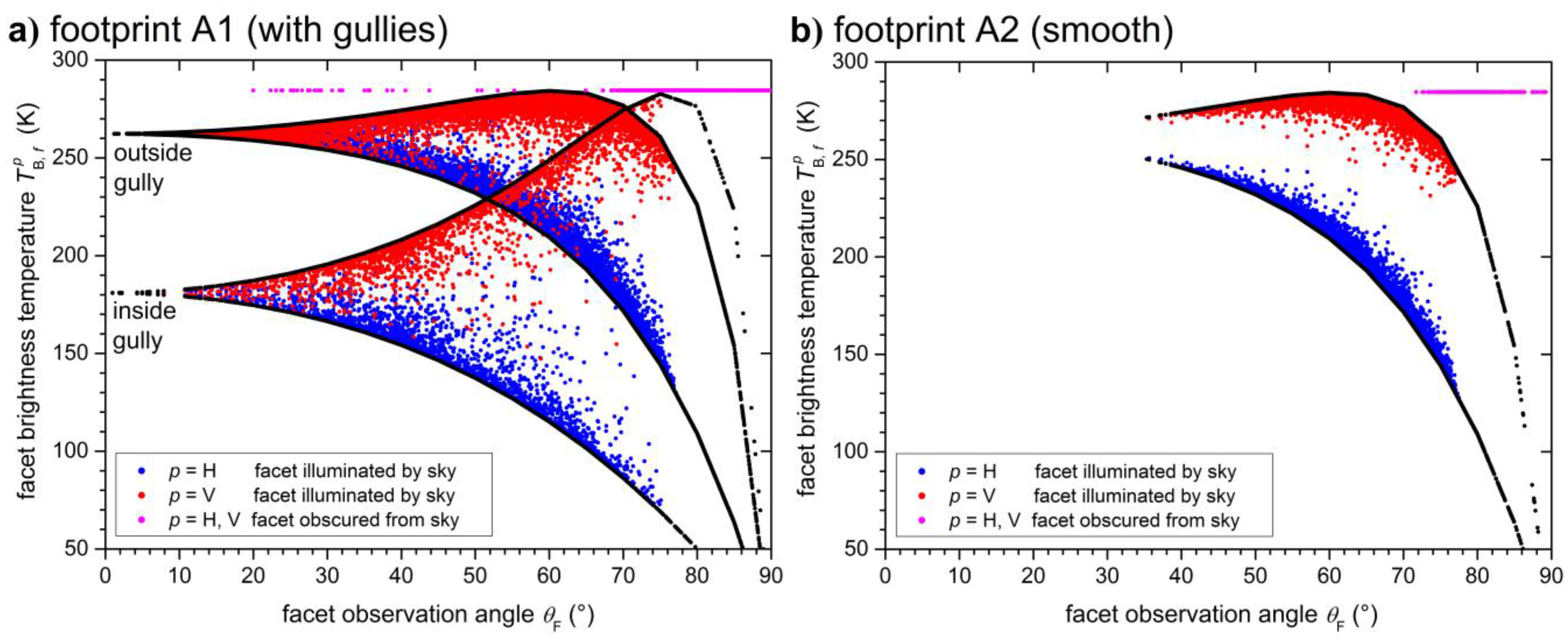
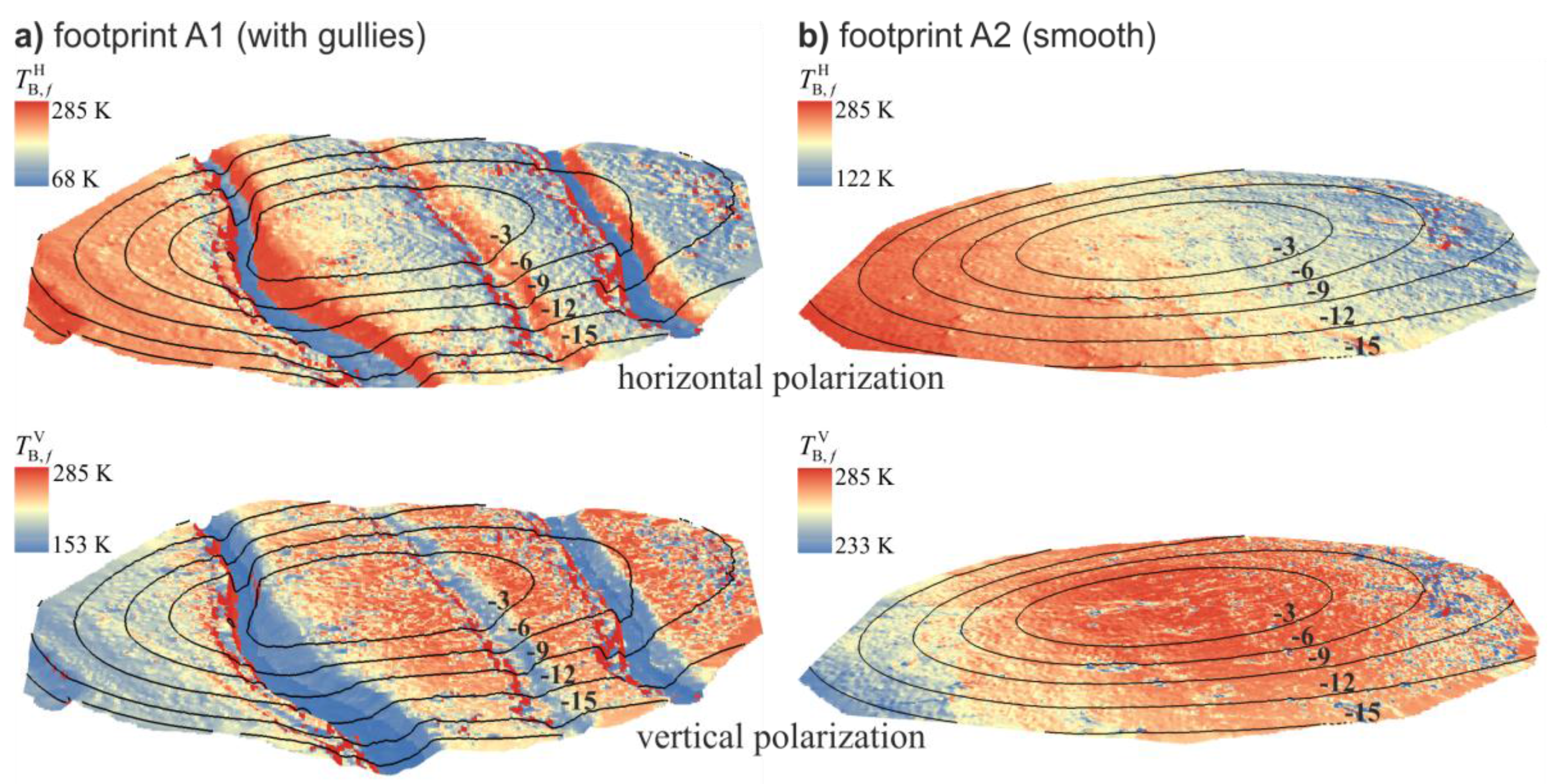
4.3. Footprint Topographies and Exemplary Brightness-Temperature Simulation
| Parameter | Footprint A1 | Footprint A2 |
|---|---|---|
| total number n of facets/area of footprint | 48,529/121 m2 | 60,089/150 m2 |
| number of invisible facets | 3077 | 99 |
| number of facets in gullies | 3666 (2546) | 0 |
| number of facets receiving radiation from the surrounding landscape | 3466 (1619) | 445 (380) |
| distance r between radiometer and facets | 13.18 m ≤ r ≤ 25.26 m | 14.22 m ≤ r ≤ 29.64 m |
| azimuth angle ϕ between and | 0° ≤ ϕ ≤ 23° | 0° ≤ ϕ ≤ 21° |
| polar angle ω between and | 0° ≤ ω ≤ 19° | 0° ≤ ω ≤ 18° |
| view-direction elevation angle θVD | 36° ≤ θVD ≤ 66° | 39° ≤ θVD ≤ 66° |
| slope (tilt angle) α | 0° ≤ α ≤ 75° | 0° ≤ α ≤ 43° |
| facet elevation angle θF | 1° ≤ θF ≤ 127° | 35° ≤ θF ≤ 97° |
| angle φ of polarization rotation | 0° ≤ φ ≤ 90° | 0° ≤ φ ≤ 40° |
| elevation angle θ’VD of radiation incident on the facets | 1° ≤ θ’VD ≤ 179° | 14° ≤ θ’VD ≤ 129° |
4.4. Brightness-Temperature Time Series
4.4.1. Measurements

| Measurements | Simulations | |||||
|---|---|---|---|---|---|---|
| Polarization | (K) | (K) | (K) | (K) | (K) | (K) |
| p = H | 200.6 | 174.8 | 25.8 | 195.9 | 178.5 | 17.4 |
| p = V | 260.0 | 264.4 | −4.4 | 259.4 | 270.5 | −11.1 |
4.4.2. Simulations
4.4.3. Simulation Performance
| Footprint, Polarization | Measured Topography | Tilted Planes | ||||
|---|---|---|---|---|---|---|
| B (K) | RMSE (K) | R2 | B (K) | RMSE (K) | R2 | |
| A1, H-pol. | −4.7 | 18.8 | 0.71 | −11.2 | 22.7 | 0,70 |
| A1, V-pol. | −0.6 | 7.1 | 0.82 | 7.2 | 9.7 | 0.82 |
| A2, H-pol. | 3.7 | 25.0 | 0.56 | 2.8 | 25.0 | 0.56 |
| A2, V-pol. | 6.1 | 8.7 | 0.78 | 7.1 | 9.5 | 0.78 |
5. Discussion
- The observed scene is approximated by a mosaic of planar facets, which means small-scale surface roughness and diffuse scattering are ignored.
- Facet contributions are added incoherently, even though facet dimensions (5 cm × 5 cm) are smaller than the L-band observation wavelength λ ≈ 21 cm (the corresponding justification is provided in Section 3).
- The dielectric mixing model (Equations (3) and (4)) applied to derive soil permittivity from soil-water content does not take into account any soil-specific dielectric properties of the investigated footprints.
- When distinguishing facets obscured from the cold sky by their surroundings, we assumed a flat horizon and represented such facets as black-body radiators in the radiative transfer model Equation (18).
- The COUP model uses a one-dimensional approach that does not take into account lateral water and heat flow.
- The thermal and hydrological soil properties were assumed to be identical everywhere laterally, and only four different parameterizations were used in vertical direction (Table 1). Temporal variations in soil properties caused, e.g., by a redistribution of the different soil fractions were neglected.
- The soil parameterization is based on soil texture and in situ measurements within the research catchment. Differences in soil properties arising from the different histories of both footprint areas (especially the initial leveling of footprint A2) are not considered.
6. Summary and Conclusions
Supplementary Files
Supplementary File 1Acknowledgments
Author Contributions
Conflicts of Interest
References
- Wagner, W.; Bloschl, G.; Pampaloni, P.; Calvet, J.C.; Bizzarri, B.; Wigneron, J.-P.; Kerr, Y. Operational readiness of microwave remote sensing of soil moisture for hydrologic applications. Nord. Hydrol. 2007, 38, 1–20. [Google Scholar] [CrossRef]
- Schmugge, T.J.; Kustas, W.P.; Ritchie, J.C.; Jackson, T.J.; Rango, A. Remote sensing in hydrology. Adv. Water Res. 2002, 25, 1367–1385. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Waldteufel, P.; Wigneron, J.-P.; Delwart, S.; Cabot, F.; Boutin, J.; Escorihuela, M.J.; Font, J.; Reul, N.; Gruhier, C.; et al. The SMOS mission: New tool for monitoring key elements of the global water cycle. Proc. IEEE 2010, 98, 666–687. [Google Scholar] [CrossRef] [Green Version]
- Schmugge, T. Remote sensing of soil moisture. In Encyclopedia of Hydrological Forecasting; Anderson, M.G., Burt, T., Eds.; Wiley: Chichester, UK, 1985; pp. 101–124. [Google Scholar]
- Shutko, A.M. Microwave radiometry of lands under natural and artificial moistening. IEEE Trans. Geosci. Remote Sens. 1982, GE-20, 18–26. [Google Scholar] [CrossRef]
- Guglielmetti, M.; Schwank, M.; Mätzler, C.; Oberdörster, C.; Vanderborght, J.; Flühler, H. FOSMEX: Forest soil moisture experiments with microwave radiometry. IEEE Trans. Geosci. Remote Sens. 2008, 46, 727–735. [Google Scholar] [CrossRef]
- Wigneron, J.-P.; Kerr, Y.H.; Waldteufel, P.; Saleh, K.; Escorihuela, M.-J.; Richaume, P.; Ferrazzoli, P.; Rosnay, P.D.; Gurney, R.; Calvet, J.-C.; et al. L-band microwave emission of the biosphere (L-MEB) model: Description and calibration against experimental data sets over crop fields. Remote Sens. Environ. 2007, 107, 639–655. [Google Scholar] [CrossRef]
- Choudhury, B.J.; Schmugge, T.; Mo, T. A parameterization of effective soil temperature for microwave emission. J. Geophys. Res. 1982, 87, 1301–1304. [Google Scholar] [CrossRef]
- Wigneron, J.-P.; Chanzy, A.; Rosnay, P.D.; Rüdiger, C.; Calvet, J.-C. Estimating the effective soil temperature at L-band as a function of soil properties. IEEE Geosci. Remote Sens. Lett. 2008, 46, 797–807. [Google Scholar] [CrossRef]
- Wiesmann, A.; Mätzler, C. Microwave emission model of layered snowpacks. Remote Sens. Environ. 1999, 70, 307–316. [Google Scholar] [CrossRef]
- Mätzler, C. Passive microwave signatures of landscapes in winter. Meteorol. Atmos. Phys. 1994, 54, 241–260. [Google Scholar] [CrossRef]
- Rautiainen, K.; Lemmetyinen, J.; Schwank, M.; Kontu, A.; Ménard, C.B.; Mätzler, C.; Drusch, M.; Wiesmann, A.; Ikonen, J.; Pulliainen, J. Detection of soil freezing from L-band passive microwave observations. Remote Sens. Environ. 2014, 147, 206–218. [Google Scholar] [CrossRef]
- Schwank, M.; Rautiainen, K.; Mätzler, C.; Stähli, M.; Lemmetyinen, J.; Pulliainen, J.; Vehviläinen, J.; Kontu, A.; Ikonen, J.; Ménard, C.B.; et al. Model for microwave emission of a snow-covered ground with focus on L band. Remote Sens. Environ. 2014, 154, 180–191. [Google Scholar] [CrossRef]
- Schwank, M.; Stähli, M.; Wydler, H.; Leuenberger, J.; Mätzler, C.; Flühler, H. Microwave L-band emission of freezing soil. IEEE Trans. Geosci. Remote Sens. 2004, 42, 1252–1261. [Google Scholar] [CrossRef]
- Schneeberger, K.; Schwank, M.; Stamm, C.; Rosnay, P.d.; Mätzler, C.; Flühler, H. Topsoil structure influencing soil water retrieval by microwave radiometry. Vadose Zone J. 2004, 3, 1169–1179. [Google Scholar] [CrossRef]
- Schwank, M.; Völksch, I.; Wigneron, J.-P.; Kerr, Y.H.; Mialon, A.; Rosnay, P.D.; Mätzler, C. Comparison of two bare-soil reflectivity models and validation with L-band radiometer measurements. IEEE Trans. Geosci. Remote Sens. 2010, 48, 325–337. [Google Scholar] [CrossRef]
- Wigneron, J.-P.; Laguerre, L.; Kerr, Y.H. A simple parameterization of the L-band microwave emission from rough agricultural soils. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1697–1707. [Google Scholar] [CrossRef]
- Mätzler, C.; Standley, A. Technical note: Relief effects for passive microwave remote sensing. Int. J. Remote Sens. 2000, 21, 2403–2412. [Google Scholar] [CrossRef]
- Kerr, Y.H.; Secherre, F.; Lastenet, J.; Wigneron, J.-P. SMOS: Analysis of perturbing effects over land surfaces. In Proceedings of the International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 908–910.
- Monerris, A.; Benedicto, P.; Vall-Ilossera, M.; Camps, A.; Santanach, E.; Piles, M.; Prehn, R. Assessment of the topography impact on microwave radiometry at L-band. J. Geophys. Res. 2008, 113, B12202. [Google Scholar] [CrossRef]
- Utku, C.; le Vine, D.M. Topographic signatures in aquarius radiometer and scatterometer response. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4141–4154. [Google Scholar] [CrossRef]
- Pierdicca, N.; Pulvirenti, L.; Marzano, F.S. Simulating topographic effects on spaceborne radiometric observations between L and X frequency bands. IEEE Trans. Geosci. Remote Sens. 2010, 48, 273–282. [Google Scholar] [CrossRef]
- Pulvirenti, L.; Pierdicca, N.; Marzano, F.S. Prediction of the error induced by topography in satellite microwave radiometric observations. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3180–3188. [Google Scholar] [CrossRef]
- Utku, C.; le Vine, D.M. A model for prediction of the impact of topography on microwave emission. IEEE Trans. Geosci. Remote Sens. 2011, 49, 395–405. [Google Scholar] [CrossRef]
- Monerris, A.; Benedicto, P.; Vall-Hossera, M.; Camps, A.; Piles, M.; Santanach, E.; Prehn, R. Topography effects on the L-band emissivity of soils: TuRTLE 2006 field experiment. In Proceedings of the International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–28 July 2007; pp. 2244–2247.
- Mätzler, C.; Weber, D.; Wüthrich, M.; Schneeberger, K.; Stamm, C.; Wydler, H.; Flühler, H. ELBARA, the ETH L-band radiometer for soil-moisture research. In Proceedings of the International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 3058–3060.
- Gerwin, W.; Schaaf, W.; Biemelt, D.; Fischer, A.; Winter, S.; Hüttl, R.F. The artificial catchment “Chicken Creek” (Lusatia, Germany)—A landscape laboratory for interdisciplinary studies of initial ecosystem development. Ecol. Eng. 2009, 35, 1786–1796. [Google Scholar] [CrossRef]
- Gerwin, W.; Schaaf, W.; Biemelt, D.; Elmer, M.; Maurer, T.; Schneider, A. The artificial catchment “Hühnerwasser” (Chicken Creek): Construction and initial properties. In Ecosystem Development; Hüttel, R.F., Schaaf, W., Biemelt, D., Gerwin, W., Eds.; BTU Cottbus: Cottbus, Germany, 2010; Volume 1, Available online: http://opus4.kobv.de/opus4-btu/files/2008/Ecol_Dev_Vol_1_2010.pdf (accessed on 2 September 2014).
- SFB/TRR 38. Available online: http://www.tu-cottbus.de/fzlb_intern/Freigabe/sites/SFBTR_38/index.htm (accessed on 2 September 2014).
- Guglielmetti, M.; Schwank, M.; Mätzler, C.; Oberdörster, C.; Vanderborght, J.; Flühler, H. Measured microwave radiative transfer properties of a deciduous forest canopy. Remote Sens. Environ. 2007, 109, 523–532. [Google Scholar] [CrossRef]
- De Jeu, R.A.M.; Holmes, T.; Owe, M. Deriving land surface parameters from 3 different vegetated sites with the ELBARA 1.4-GHz passive microwave radiometer. In Proceedings of Remote Sensing of Agriculture, Ecosystems, and Hydrology V, Barcelona, Spain, 24 February 2004.
- Pickett, H.M.; Hardy, J.C.; Farhoomand, J. Characterization of a dual-mode horn for submillimeter wavelengths. IEEE Trans. Microw. Theory Tech. 1984, MTT-32, 936–937. [Google Scholar] [CrossRef]
- Schwank, M.; Wiesmann, A.; Werner, C.; Mätzler, C.; Weber, D.; Murk, A.; Völksch, I.; Wegmüller, U. ELBARA II, an L-band radiometer system for soil moisture research. Sensors 2010, 10, 584–612. [Google Scholar] [CrossRef] [PubMed]
- Schaaf, W.; Biemelt, D.; Hüttl, R.F. Initial development of the artificial catchment “Chicken Creek”-monitoring program and survey 2005–2008. In Ecosystem Development; Hüttel, R.F., Schaaf, W., Biemelt, D., Gerwin, W., Eds.; BTU Cottbus: Cottbus, Germany, 2010; Volume 2, Available online: http://opus4.kobv.de/opus4-btu/files/2009/Ecol_Dev_Vol_2_2010.pdf (accessed on 2 September 2014).
- ECH2O-TE. Available online: http://www.decagon.com/products/discontinued-products/ech2o-te/ingo (accessed on 2 September 2014).
- LMS-Z420i. Available online: http://www.riegl.com/nc/products/terrestrial-scanning/produktdetail/product/scanner/4/ (accessed on 2 September 2014).
- ArcGIS. Available online: http://www.esri.com/software/arcgis/index.html (accessed on 2 September 2014).
- Mätzler, C. Relief effects for microwave radiometry. In Thermal Microwave Radiation—Applications for Remote Sensing; Mätzler, C., Ed.; The Institution of Engineering and Technology (IET): London, UK, 2006; Volume 52, pp. 240–249. [Google Scholar]
- Schanda, E. Backscattering from rough surfaces. In Physical Fundamentals of Remote Sensing; Springer: Berlin, Germany, 1986; pp. 120–135. [Google Scholar]
- Wegmüller, U. The effect of freezing and thawing on the microwave signatures of bare soil. Remote Sens. Environ. 1990, 33, 123–135. [Google Scholar] [CrossRef]
- Jansson, P.-E.; Moon, D. A coupled model of water, heat and mass transfer using object orientation to improve flexibility and functionality. Environ. Model. Softw. 2001, 16, 37–46. [Google Scholar] [CrossRef]
- Richards, L.A. Capillary conduction of liquids through porous mediums. Physics 1931, 1, 318–333. [Google Scholar] [CrossRef]
- Brooks, R.H.; Corey, A.T. Hydraulic properties of porous media. In Hydrology Papers Colorado State University; Colorado State University: Fort Collins, CO, USA, 1964; pp. 1–25. [Google Scholar]
- Mualem, Y. A new model for predicting the hydraulic conductivity of unsaturated porous media. Water Resour. Res. 1976, 12, 513–522. [Google Scholar] [CrossRef]
- Dobrowolski, J.A. Optical properties of films and coatings. In Handbook of Optics, 2nd ed.; Bass, M., Stryland, E.W.V., Williams, D.R., Wolfe, W.L., Eds.; McGraw-Hill: New York, NY, USA, 1995; Volume 1, pp. 42.41–42.130. [Google Scholar]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef]
- Stogryn, A.P.; Bull, H.T.; Rubayi, K.; Iravanchy, S. The Microwave Permittivity of Sea and Fresh Water; Aerojet Internal Report; Aerojet: Sacramento, CA, USA, 1995. [Google Scholar]
- Schwank, M.; Green, T.R. Simulated effects of soil temperature and salinity on capacitance sensor measurements. Sensors 2007, 7, 548–577. [Google Scholar] [CrossRef]
- Chanzy, A.; Kerr, Y.H.; Wigneron, J.-P.; Calvet, J.-C. Soil moisture estimation under sparse vegetation using microwave radiometry at C-band. In Proceedings of the International Geoscience and Remote Sensing Symposium, Singapore, Singapore, 3–8 August 1997; pp. 1090–1092.
- Mätzler, C. Kirchhoff’s law of thermal radiation. In Thermal Microwave Radiation—Applications for Remote Sensing; Mätzler, C., Ed.; The Institution of Engineering and Technology (IET): London, UK, 2006; Volume 52, pp. 5–7. [Google Scholar]
- Ludwig, A.C. The definition of cross polarization. IEEE Trans. Antennas Propag. 1973, 21, 116–119. [Google Scholar] [CrossRef]
- Pellarin, T.; Wigneron, J.-P.; Calvet, J.-C.; Berger, M.; Douville, H.; Ferrazzoli, P.; Kerr, Y.H.; Lopez-Baeza, E.; Pulliainen, J.; Simmonds, L.P.; et al. Two-year global simulation of L-band brightness temperatures over land. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2135–2139. [Google Scholar] [CrossRef]
- Rautiainen, K.; Lemmetyinen, J.; Pulliainen, J.; Vehviläinen, J.; Drusch, M.; Kontu, A.; Kainulainen, J.; Seppänen, J. L-band radiometer observations of soil processes in boreal and subarctic environments. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1483–1497. [Google Scholar] [CrossRef]
- Mätzler, C. Dielectric properties of natural media. In Thermal Microwave Radiation—Applications for Remote Sensing; Mätzler, C., Ed.; The Institution of Engineering and Technology (IET): London, UK, 2006; Volume 52, pp. 427–505. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Völksch, I.; Schwank, M.; Stähli, M.; Mätzler, C. Relief Effects on the L-Band Emission of a Bare Soil. Remote Sens. 2015, 7, 14327-14359. https://doi.org/10.3390/rs71114327
Völksch I, Schwank M, Stähli M, Mätzler C. Relief Effects on the L-Band Emission of a Bare Soil. Remote Sensing. 2015; 7(11):14327-14359. https://doi.org/10.3390/rs71114327
Chicago/Turabian StyleVölksch, Ingo, Mike Schwank, Manfred Stähli, and Christian Mätzler. 2015. "Relief Effects on the L-Band Emission of a Bare Soil" Remote Sensing 7, no. 11: 14327-14359. https://doi.org/10.3390/rs71114327