
A Natural-Rule-Based-Connection (NRBC) Method for River Network Extraction from High-Resolution Imagery


Abstract
:
1. Introduction
2. Methodology
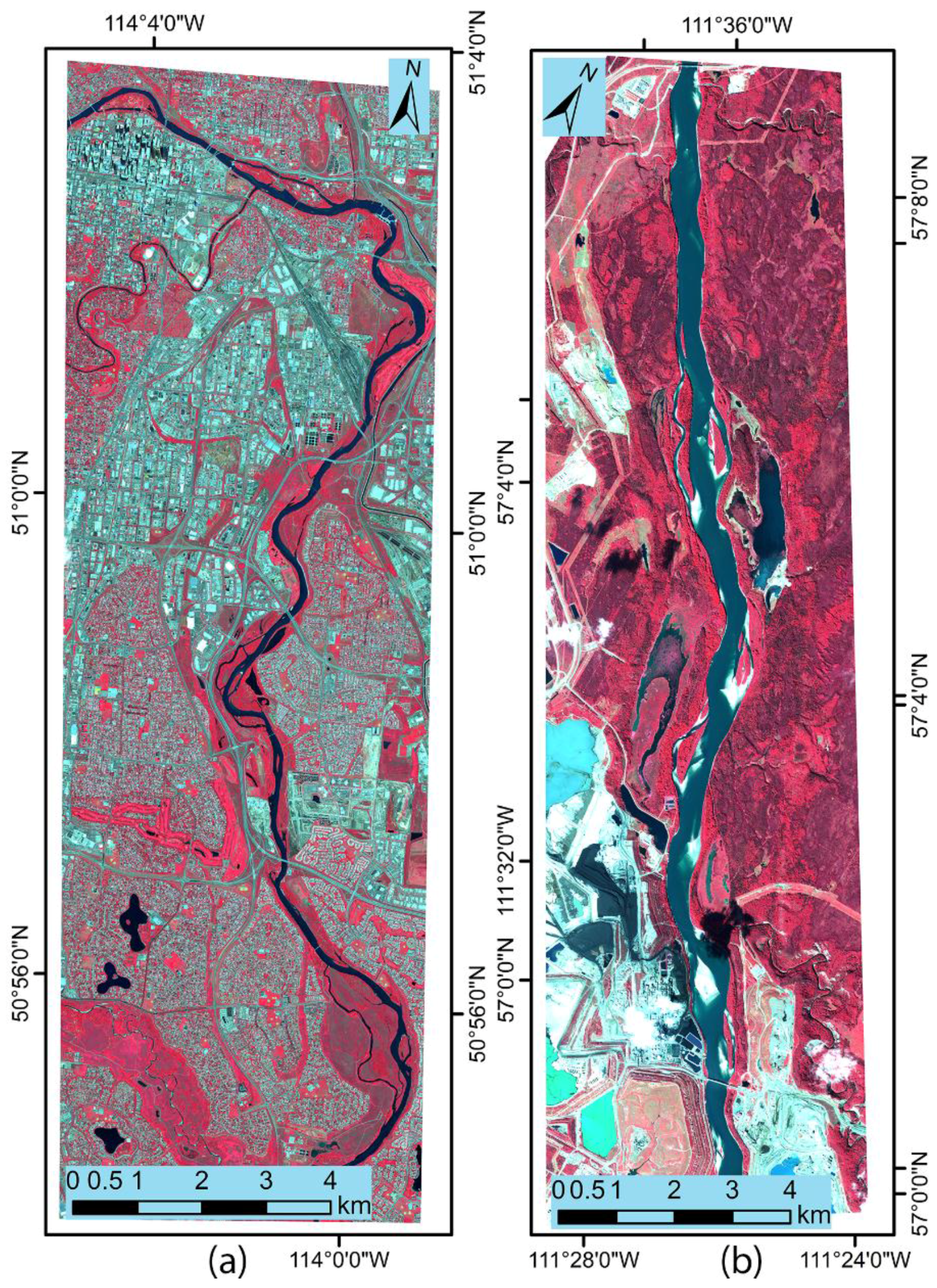
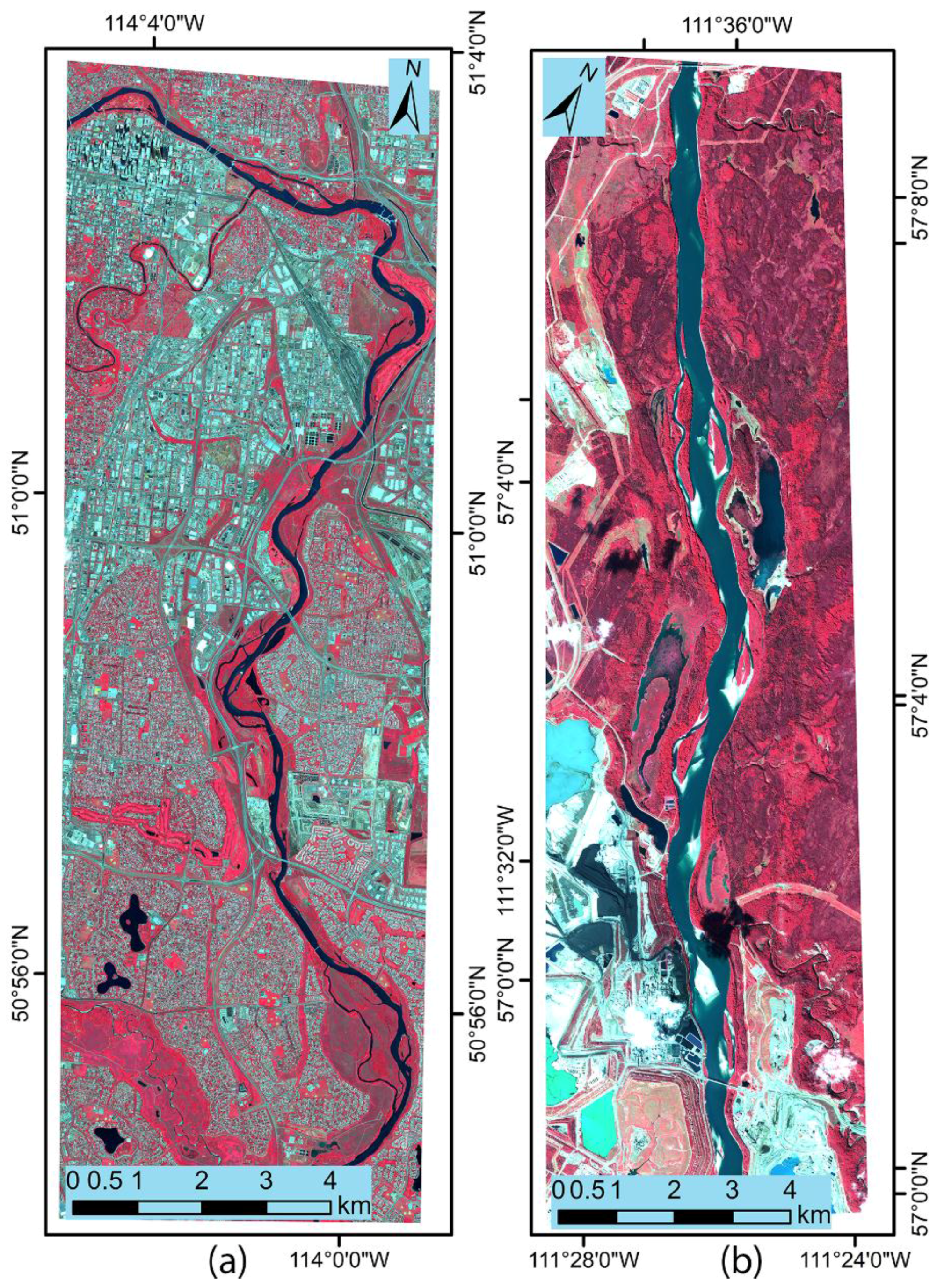
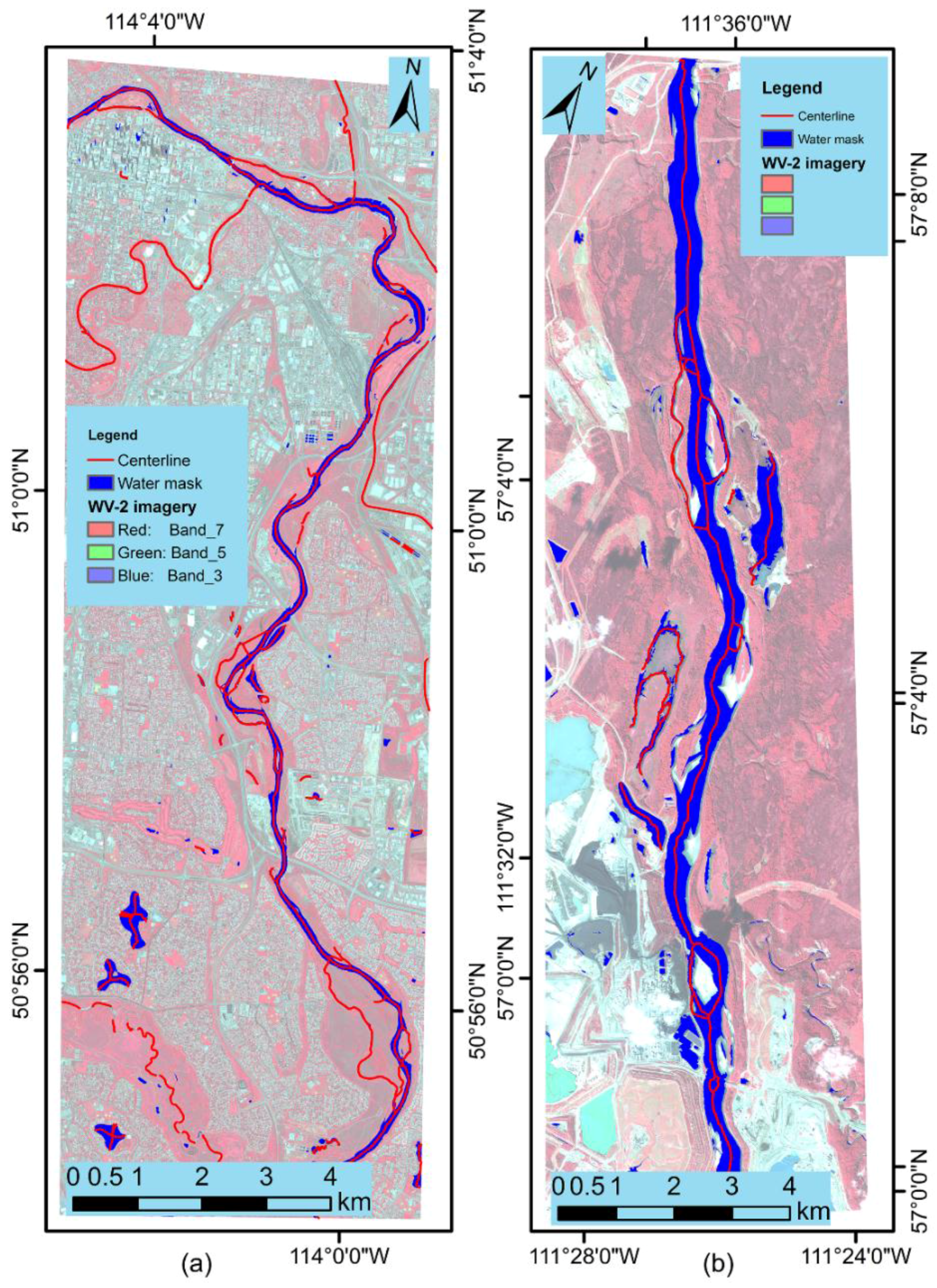
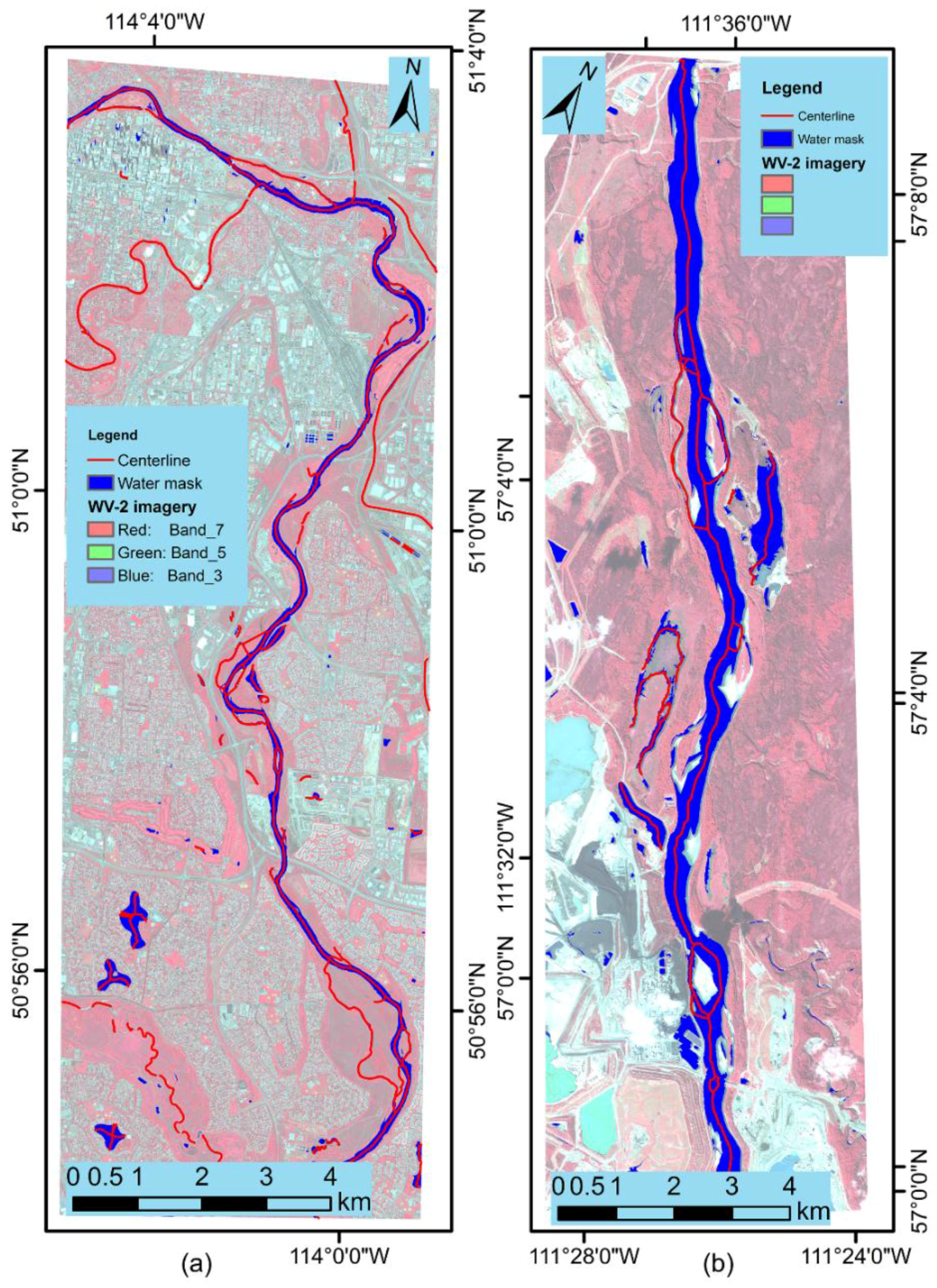
2.1. The Study Site and Imagery

| WV-2 Parameters | Bow River Site | Athabasca River Site |
|---|---|---|
| Central location | 50.973N, 114.036W | 57.063N, 111.524W |
| Acquisition time | 1 August 2012 | 13 September 2013 |
| Image size (pixel) * | 3965 × 9069 | 6959 × 9902 |
| Sun elevation angle | 56.0° | 36.3° |
| Spatial resolution | 1 Pan-band: 0.5m; 8 Multi-spectral bands: 2m | |
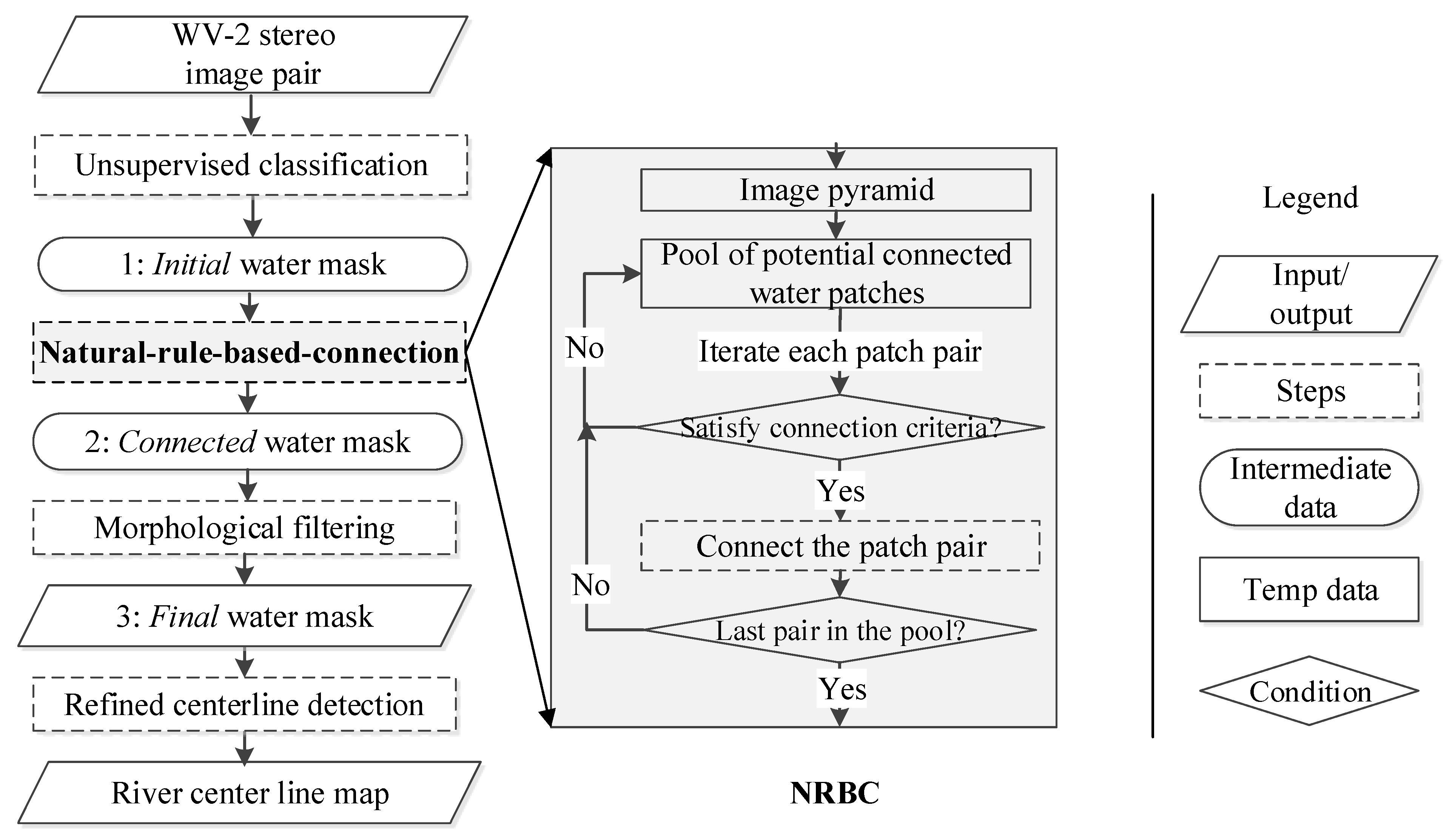
2.2. The Framework of Water Body Detection
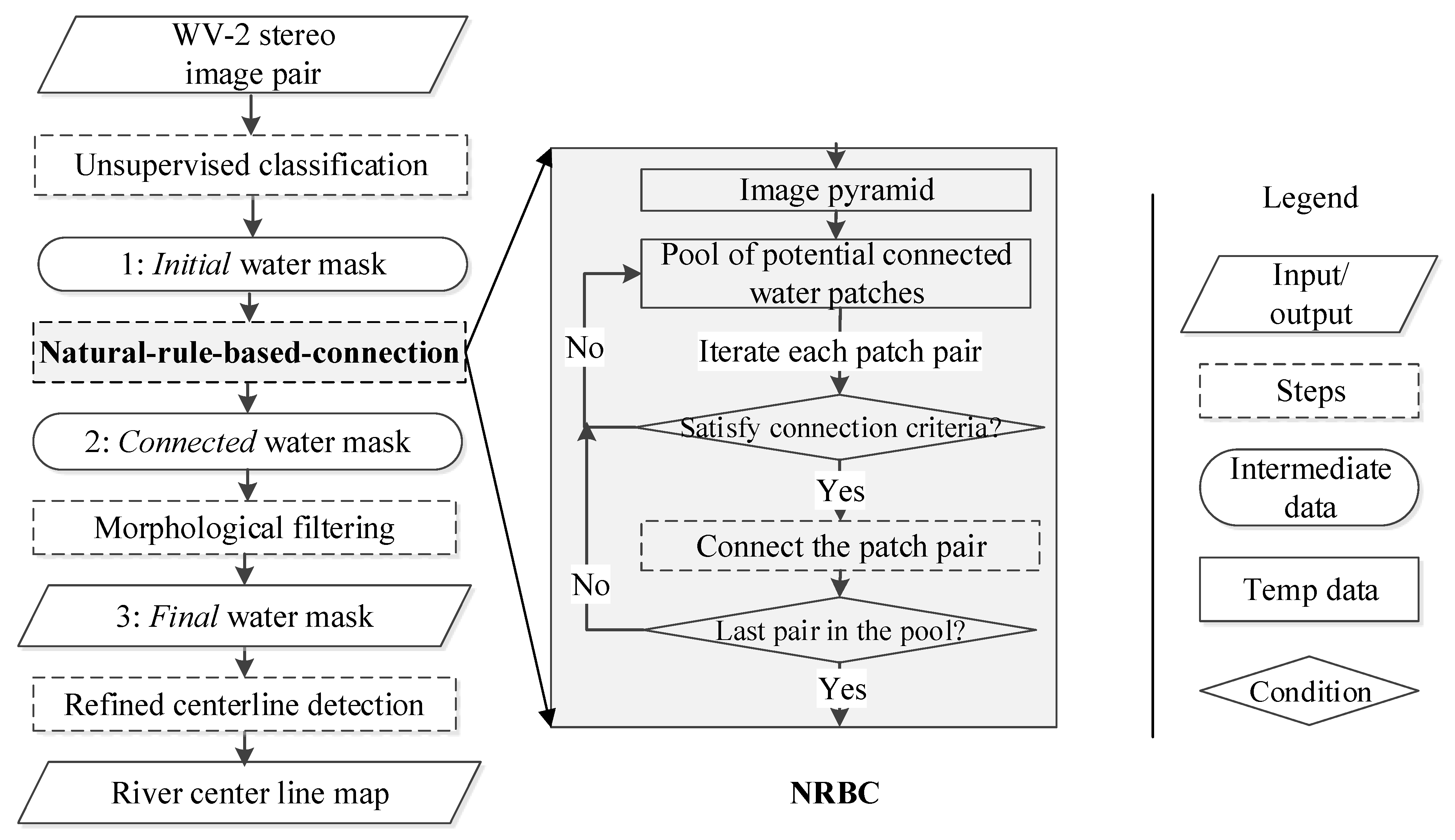
2.3. Unsupervised Classification
3. Natural Rule Based Connection (NRBC)
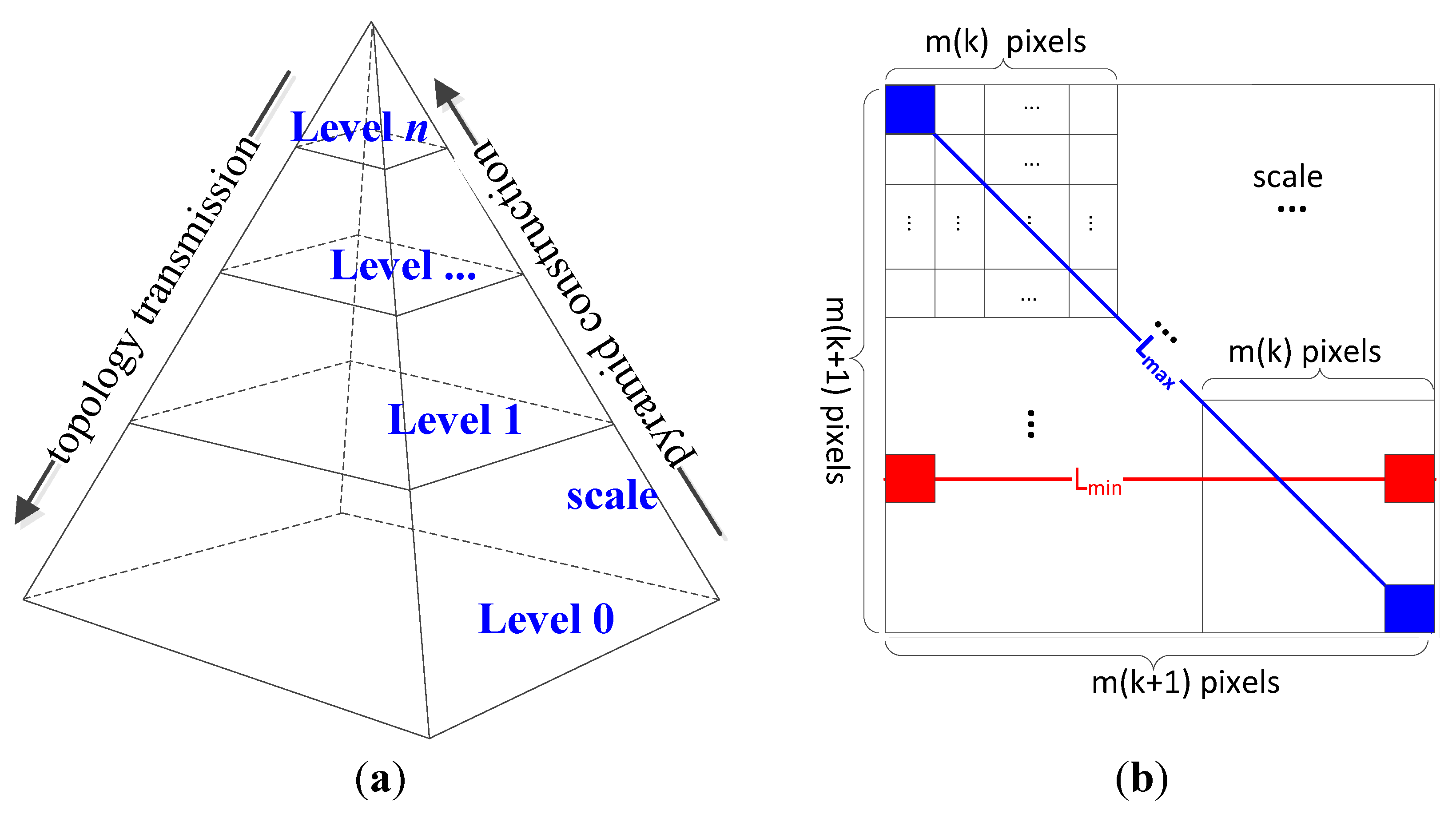
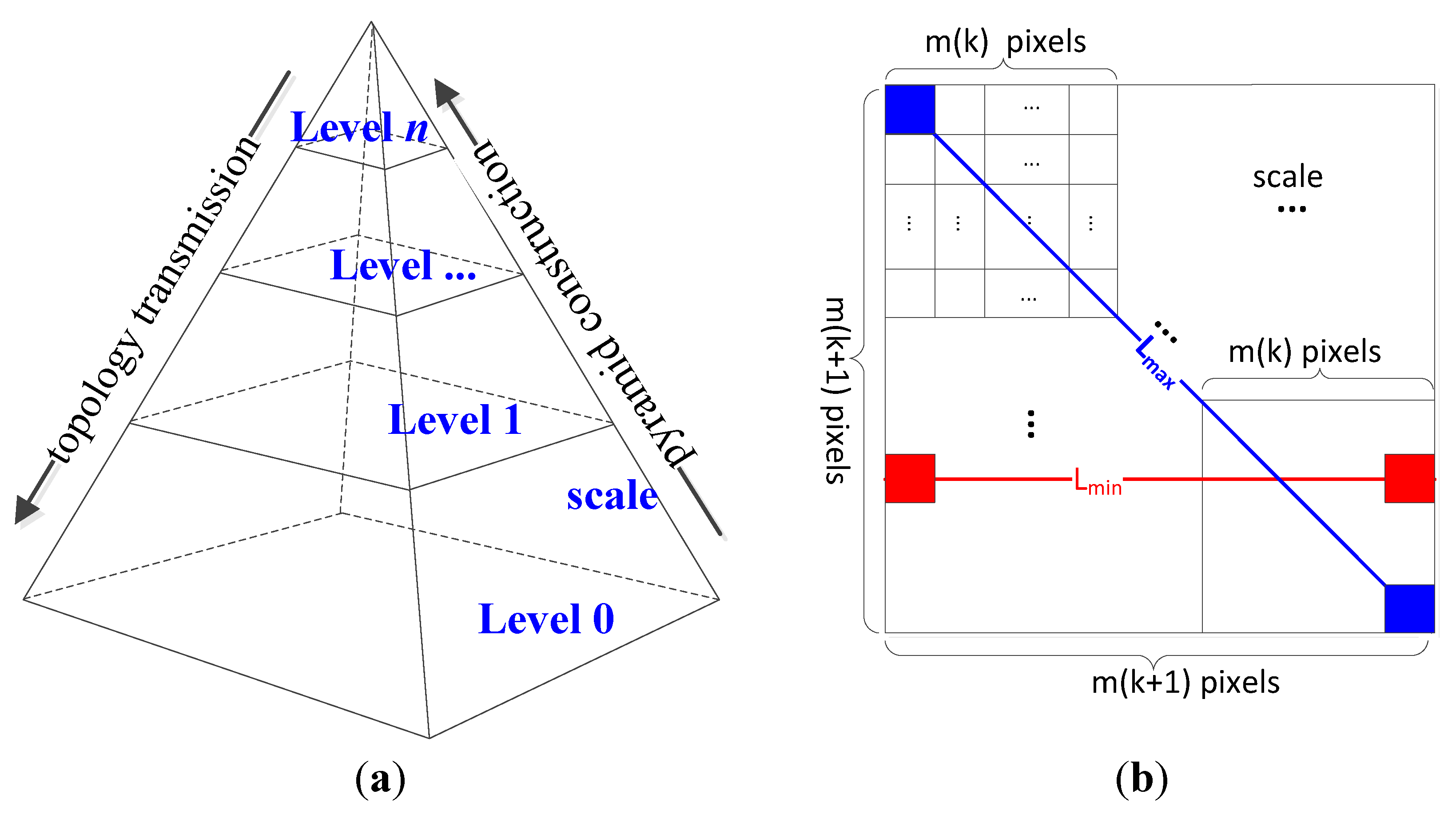
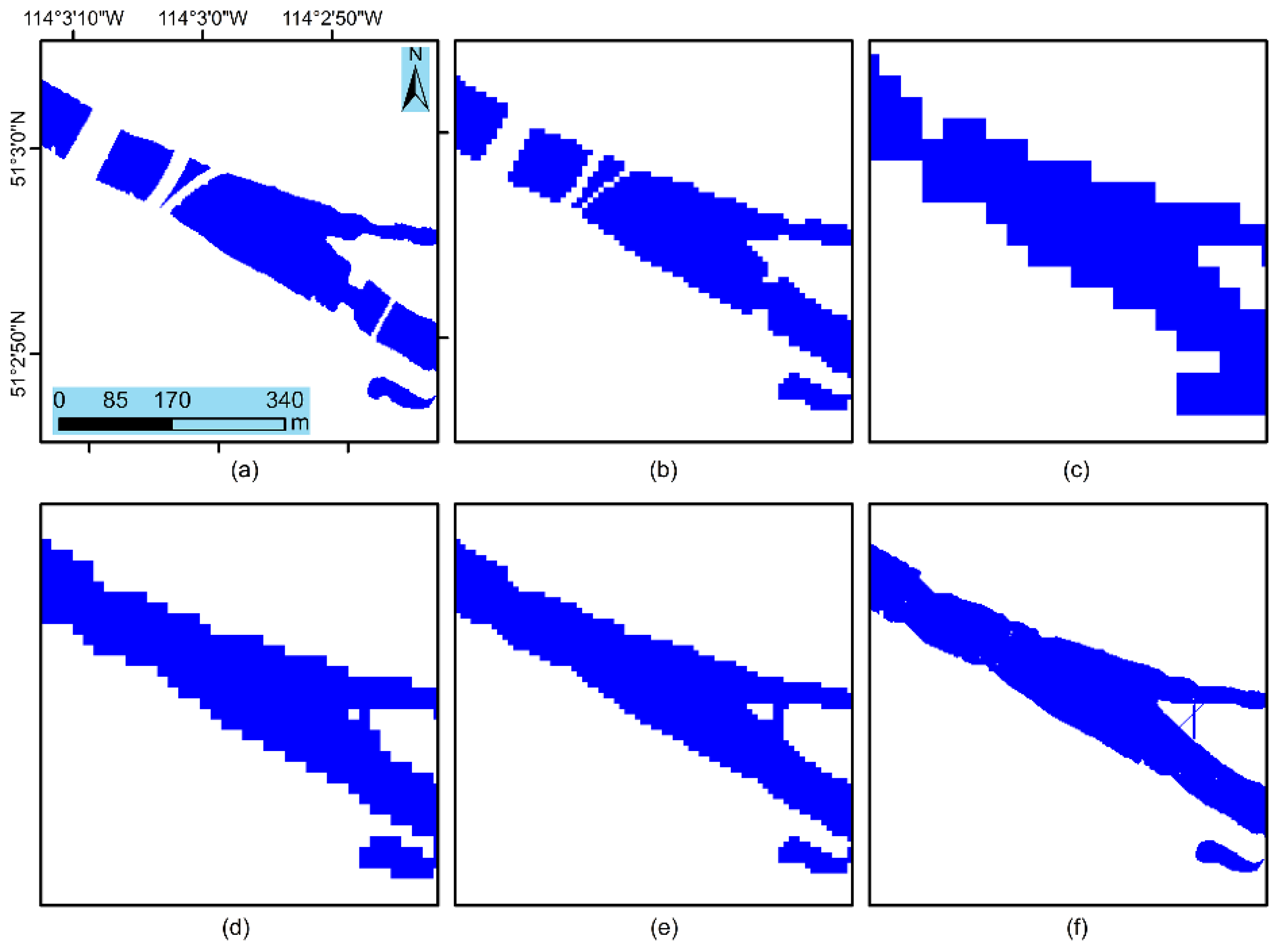
3.1. Image Pyramid Construction
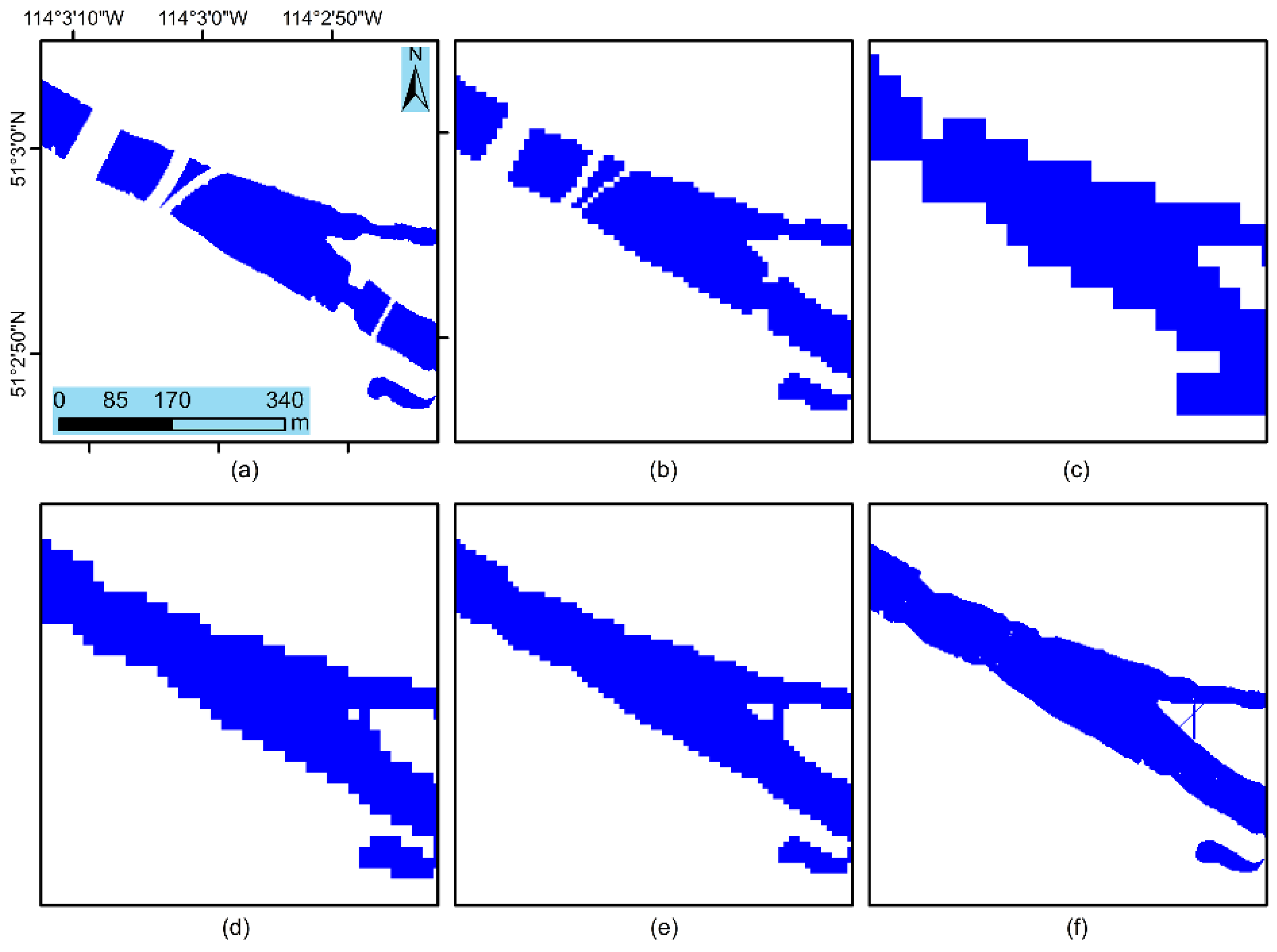
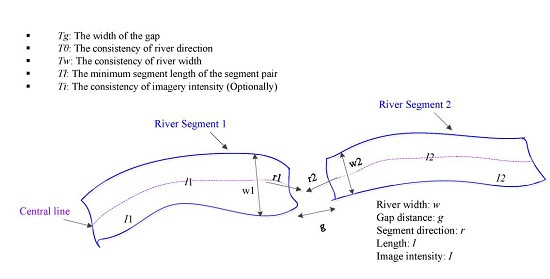
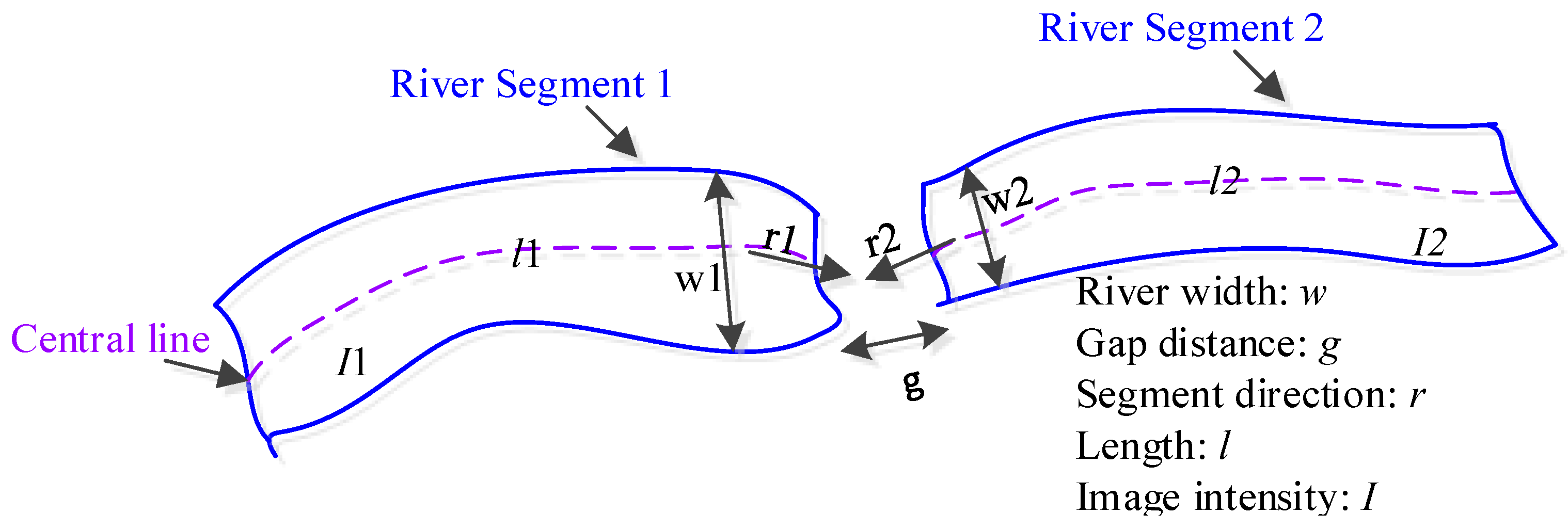
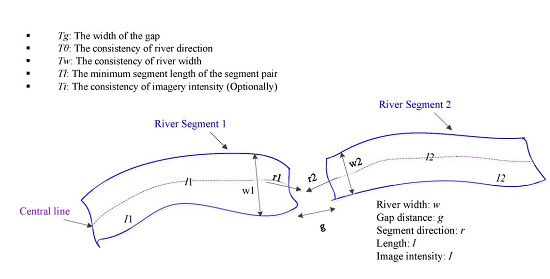
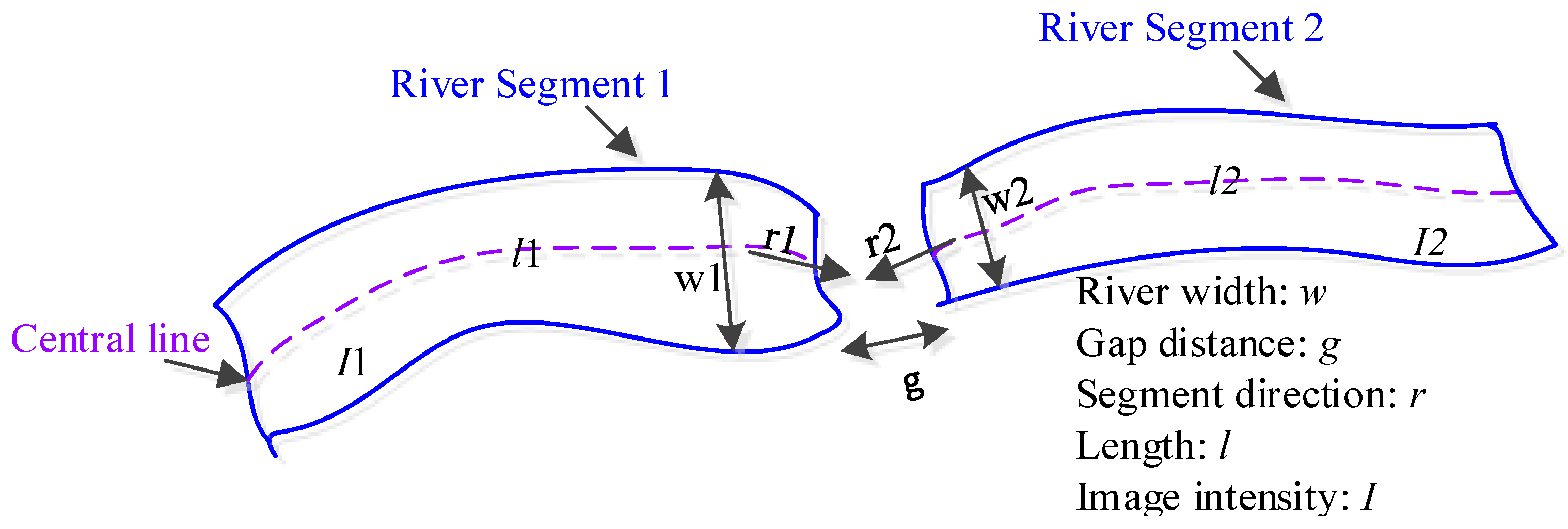
3.2. Rules to Connect River Segments
- Tg: The width of the gap
- Tθ: The consistency of river direction
- Tw: The consistency of river width
- Tl: The minimum segment length of the segment pair
- Ti: The consistency of imagery intensity (optionally)

3.3. River Segment Connection Method


4. Post-Processing and River Centerline Extraction
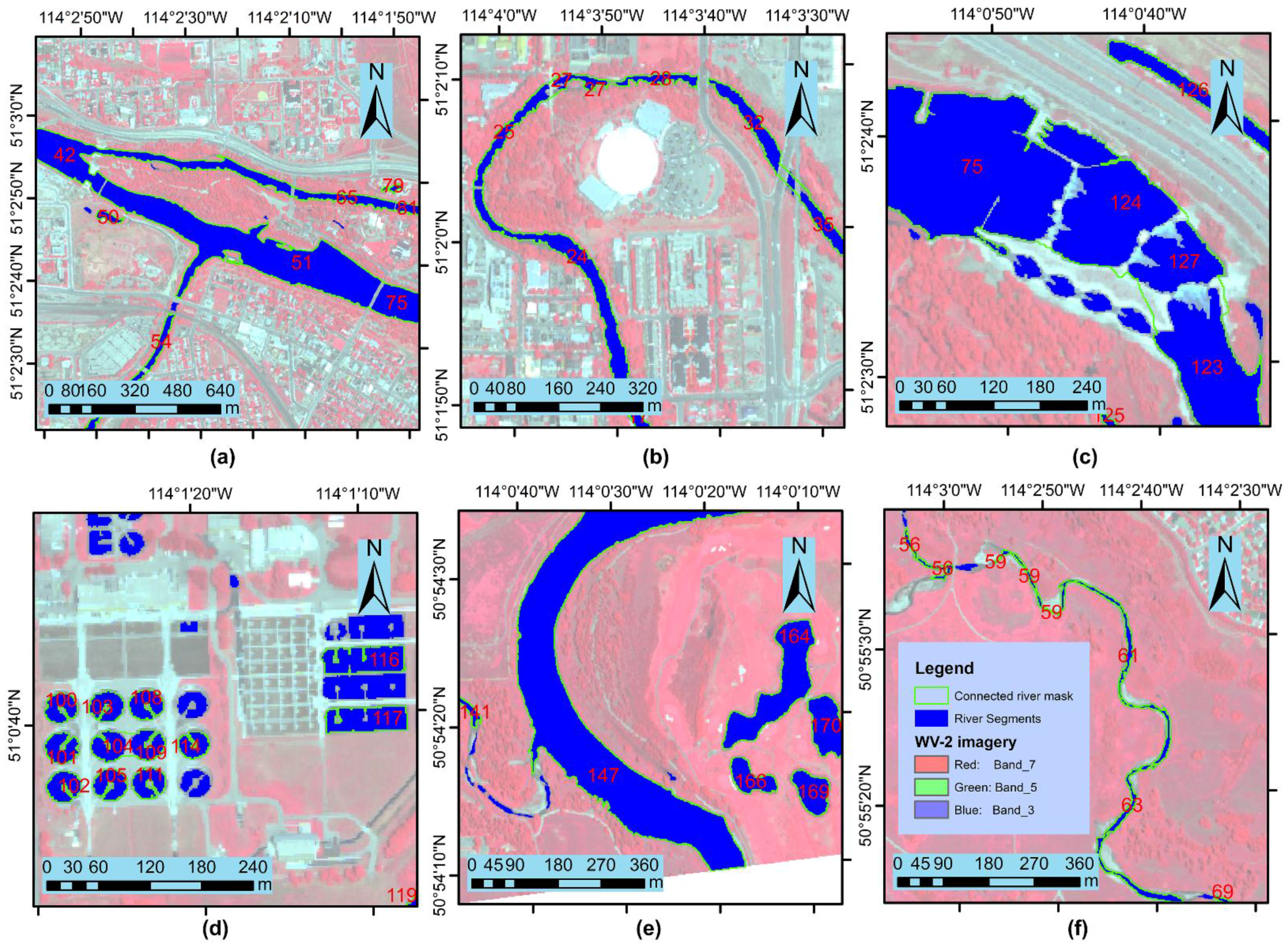
4.1. The Final Water Mask after River Segment Connection

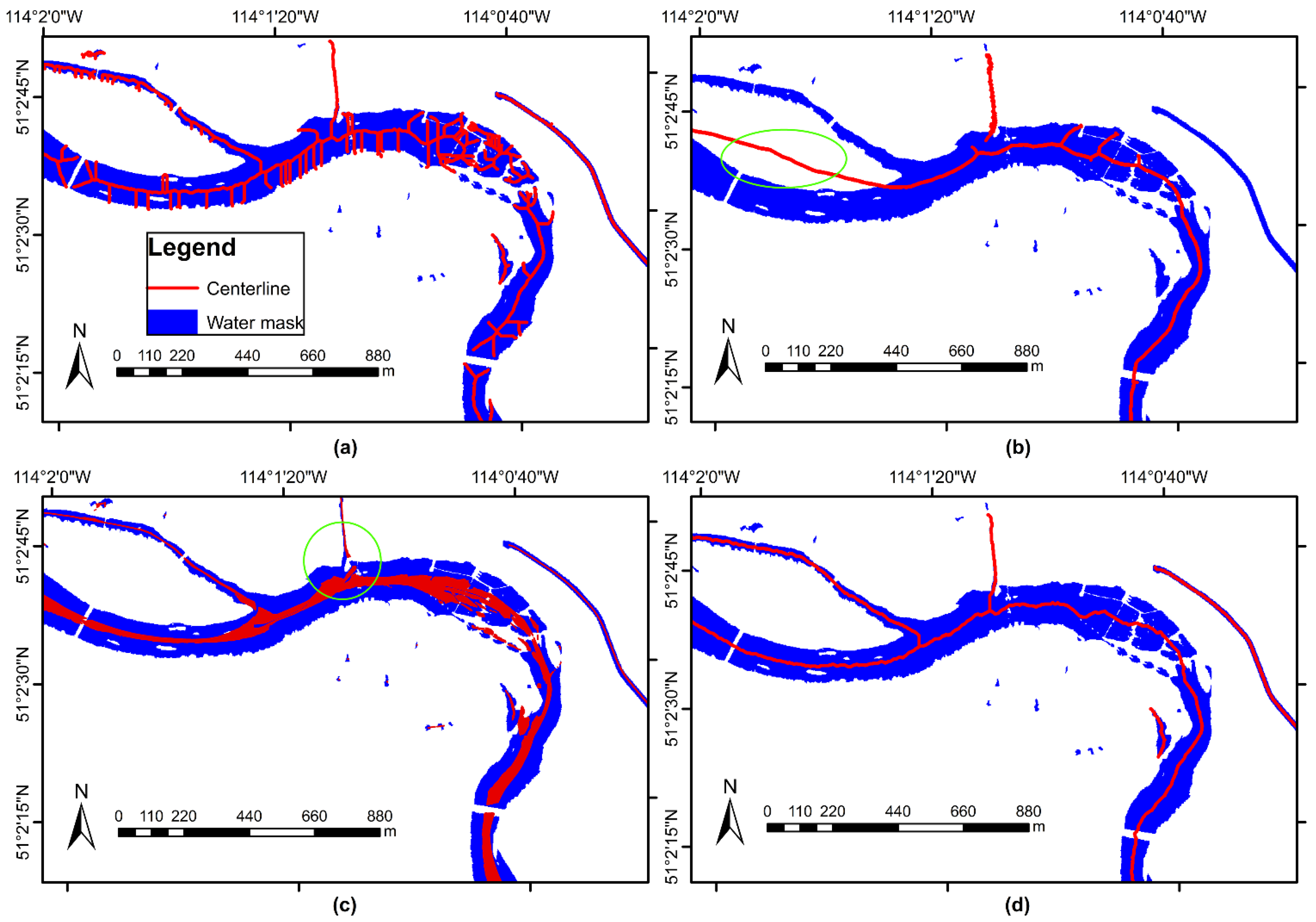
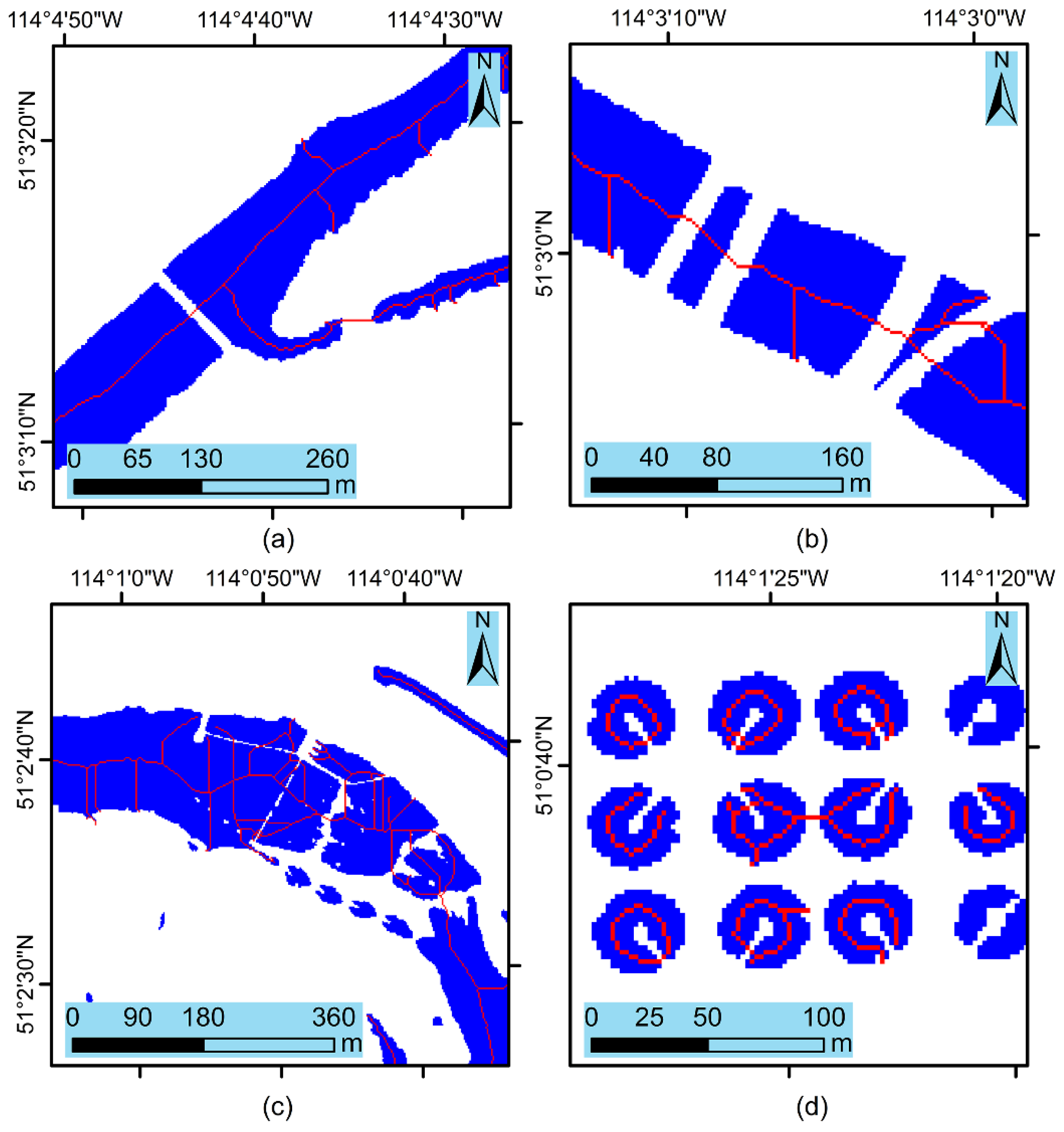
4.2. River Centerline Extraction
5. Results and discussions
5.1. Unsupervised Classification Accuracy
- User’s accuracy (UA) = overlapped area/detected water area
- Producer’s accuracy (PA) = overlapped area/reference water area
- Quality (Q) = overlapped area/(detected water area + reference water area − overlapped area)
| Methods | UA | PA | Q |
|---|---|---|---|
| ISODATA | 95.3% | 96.1% | 91.7% |
| MNDWI (threshold: 0.45) | 88.7% | 67.8% | 62.4% |
5.2. Qualitative Analysis of NRBC
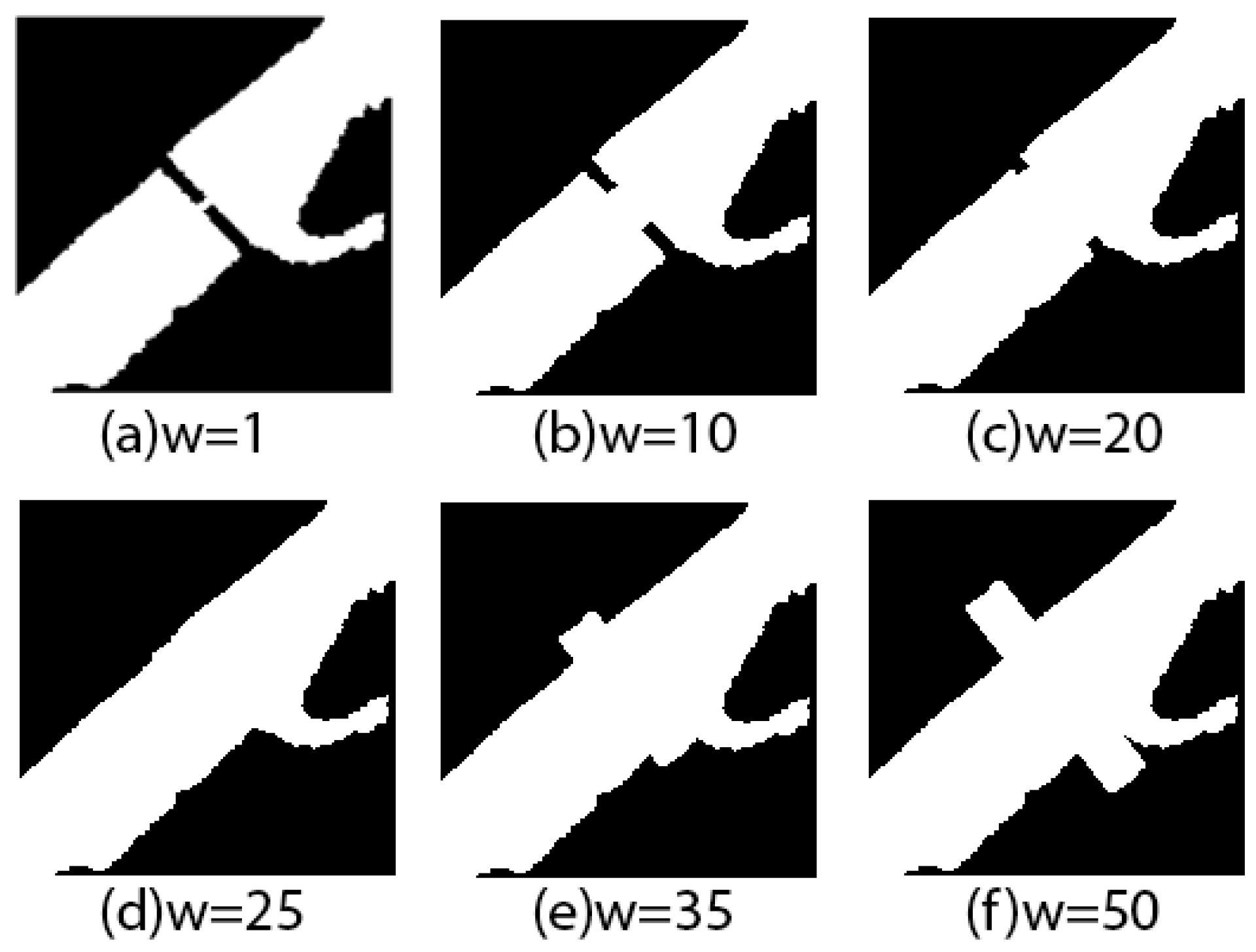
5.3. The Sensitivity of Criteria in NRBC
- “T→T”: for a pair of river segments set as “should be connected (T)” by visual inspection, it is connected (T) in the experiment.
- “T→F”: for a pair of river segments set as “should be connected (T)” by visual inspection, it is not connected (F) in the experiment.
- “F→T”: for a pair of river segments set as “should not be connected (F)” by visual inspection, it is connected (T) in the experiment.
| Image Pyramid (scale ^level) | Gap Width (pixels) | T→T * | T→F | F→T | UA | PA | Q |
|---|---|---|---|---|---|---|---|
| 2 ^3 | 11 | 31 | 26 | 3 | 91.2% | 57.4% | 54.4% |
| 2 ^4 | 22 | 44 | 13 | 3 | 93.6% | 81.5% | 77.2% |
| 2 ^5 | 45 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| 2 ^6 | 90 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| 2 ^7 | 181 | 50 | 7 | 3 | 94.3% | 92.6% | 87.7% |
| 2 ^8 | 362 | 50 | 7 | 3 | 94.3% | 92.6% | 87.7% |
| Direction Angle (°) | T→T * | T→F | F→T | UA | PA | Q |
|---|---|---|---|---|---|---|
| 30 | 40 | 17 | 2 | 95.2% | 74.1% | 71.4% |
| 40 | 44 | 13 | 2 | 95.7% | 81.5% | 78.6% |
| 50 | 48 | 9 | 2 | 96.0% | 88.9% | 85.7% |
| 60 | 50 | 7 | 3 | 94.3% | 92.6% | 87.7% |
| 70 | 50 | 7 | 3 | 94.3% | 92.6% | 87.7% |
| 80 | 50 | 7 | 3 | 94.3% | 92.6% | 87.7% |
| 90 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| 100 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| Width Ratio (max/min) | T→T* | T→F | F→T | UA | PA | Q |
|---|---|---|---|---|---|---|
| 1.5 | 45 | 12 | 1 | 97.8% | 83.3% | 81.8% |
| 2 | 48 | 9 | 2 | 96.0% | 88.9% | 85.7% |
| 2.5 | 51 | 6 | 2 | 96.2% | 94.4% | 91.1% |
| 3 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| 3.5 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| 4 | 52 | 5 | 3 | 94.5% | 96.3% | 91.2% |
| 4.5 | 52 | 5 | 3 | 94.5% | 96.3% | 91.2% |
| 5 | 52 | 5 | 3 | 94.5% | 96.3% | 91.2% |
| Min Len Ratio (Seg/gap) | T→T * | T→F | F→T | UA | PA | Q |
|---|---|---|---|---|---|---|
| 1 | 51 | 6 | 6 | 89.5% | 94.4% | 85.0% |
| 1.5 | 51 | 6 | 5 | 91.1% | 94.4% | 86.4% |
| 2 | 51 | 6 | 3 | 94.4% | 94.4% | 89.5% |
| 2.5 | 50 | 7 | 2 | 96.2% | 92.6% | 89.3% |
| 3 | 50 | 7 | 2 | 96.2% | 92.6% | 89.3% |
| 3.5 | 50 | 7 | 1 | 98.0% | 92.6% | 90.9% |
| 4 | 45 | 12 | 1 | 97.8% | 83.3% | 81.8% |
| 4.5 | 44 | 13 | 1 | 97.8% | 81.5% | 80.0% |
| 5 | 42 | 15 | 1 | 97.7% | 77.8% | 76.4% |
5.4. Comparison 1: River Segments Connection

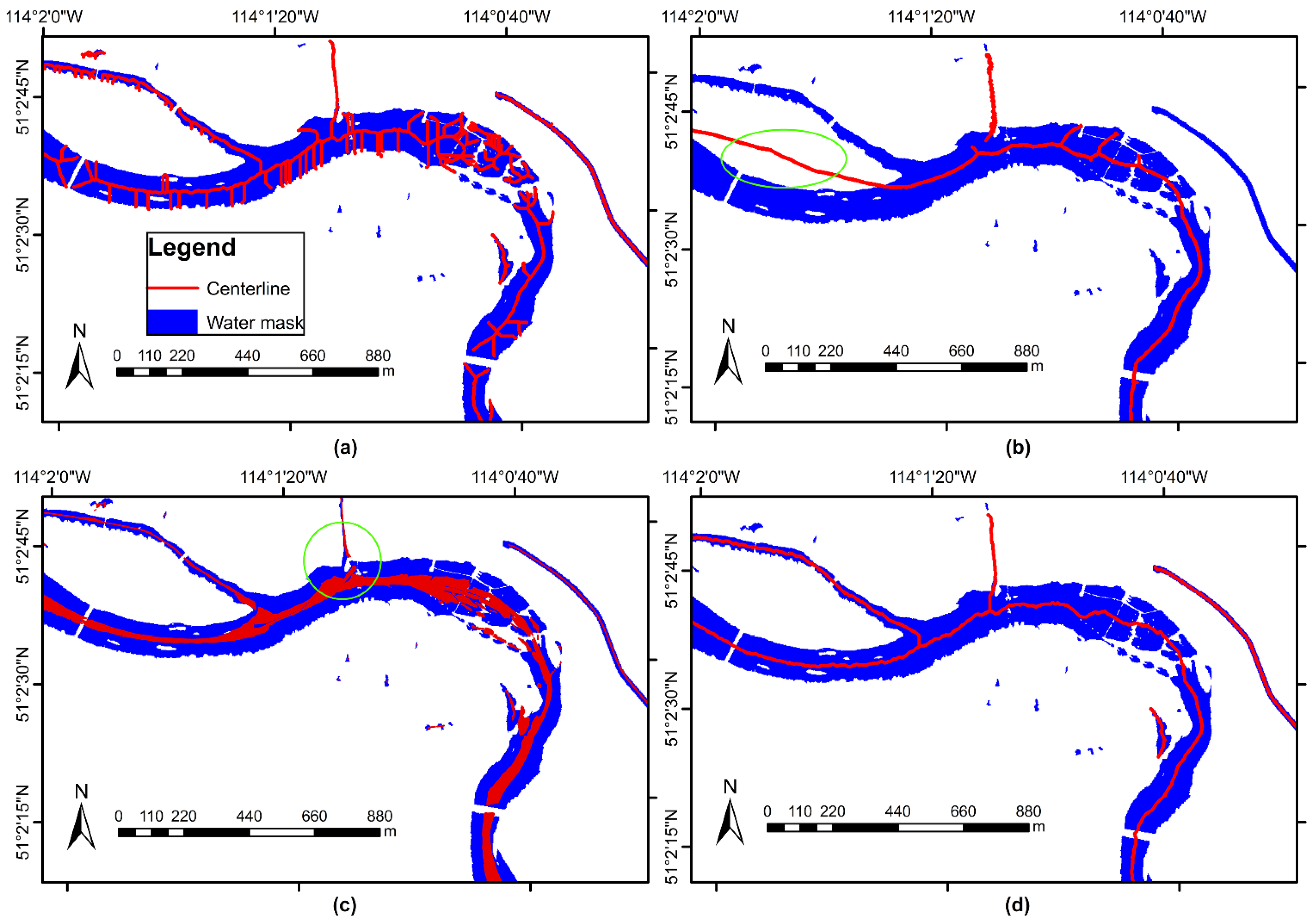
5.5. Comparison 2: River Centerline Extraction
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
5.6. The Final Water Mask and River Centerlines
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Becker, M.; da Silva, J.S.; Calmant, S.; Robinet, V.; Linguet, L.; Seyler, F. Water level fluctuations in the congo basin derived from envisat satellite altimetry. Remote Sens. 2014, 6, 9340–9358. [Google Scholar] [CrossRef]
- Ghoshal, S.; James, L.A.; Singer, M.B.; Aalto, R. Channel and floodplain change analysis over a 100-year period: Lower yuba river, California. Remote Sens. 2010, 2, 1797–1825. [Google Scholar] [CrossRef]
- Khan, S.I.; Hong, Y.; Gourley, J.J.; Khattak, M.U.; de Groeve, T. Multi-sensor imaging and space-ground cross-validation for 2010 flood along indus river, Pakistan. Remote Sens. 2014, 6, 2393–2407. [Google Scholar] [CrossRef]
- Chen, L.; Michishita, R.; Xu, B. Abrupt spatiotemporal land and water changes and their potential drivers in poyang lake, 2000–2012. ISPRS J. Photogramm. Remote Sens. 2014, 98, 85–93. [Google Scholar] [CrossRef]
- Ghosh, M.K.; Kumar, L.; Roy, C. Monitoring the coastline change of hatiya island in bangladesh using remote sensing techniques. ISPRS J. Photogramm. Remote Sens. 2015, 101, 137–144. [Google Scholar] [CrossRef]
- Smith, L.C. Satellite remote sensing of river inundation area, stage, and discharge: A review. Hydrol. Processes 1997, 11, 1427–1439. [Google Scholar] [CrossRef]
- Frazier, P.S.; Page, K.J. Water body detection and delineation with landsat TM data. Photogramm. Eng. Remote Sens. 2000, 66, 1461–1467. [Google Scholar]
- Rodríguez-Cuenca, B.; Alonso, M.C. Semi-automatic detection of swimming pools from aerial high-resolution images and lidar data. Remote Sens. 2014, 6, 2628–2646. [Google Scholar] [CrossRef]
- Xie, H.; Luo, X.; Xu, X.; Tong, X.; Jin, Y.; Pan, H.; Zhou, B. New hyperspectral difference water index for the extraction of urban water bodies by the use of airborne hyperspectral images. J. Appl. Remote Sens. 2014, 8. [Google Scholar] [CrossRef]
- Schumann, G.; Baldassarre, G.D.; Bates, P.D. The utility of spaceborne radar to render flood inundation maps based on multialgorithm ensembles. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2801–2807. [Google Scholar] [CrossRef]
- Li, X.; Liu, X.; Liu, L.; Xue, K. Comparative study of water-body information extraction methods based on electronic sensing image. In Advances in Mechanical and Electronic Engineering; Springer Berlin Heidelberg: Berlin, Germany, 2013; pp. 331–336. [Google Scholar]
- Song, C.; Huang, B.; Ke, L.; Richards, K.S. Remote sensing of alpine lake water environment changes on the tibetan plateau and surroundings: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 26–37. [Google Scholar] [CrossRef]
- Jiang, H.; Feng, M.; Xiao, T.; Wang, C. A narrow river extraction method based on linear feature enhancement in tm image. Acta Geod. Cartogr. Sin. 2014, 43, 705–710. [Google Scholar]
- Yang, K.; Li, M.; Liu, Y.; Cheng, L.; Duan, Y.; Zhou, M. River delineation from remotely sensed imagery using a multi-scale classification approach. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4726–4736. [Google Scholar] [CrossRef]
- Zhou, Y.; Luo, J.; Shen, Z.; Hu, X.; Yang, H. Multiscale water body extraction in urban environments from satellite images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4301–4312. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the normalized difference water index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Xu, H. Modification of normalised difference water index (NDWI) to enhance open water features in remotely sensed imagery. Int. J. Remote Sens. 2006, 27, 3025–3033. [Google Scholar] [CrossRef]
- Feyisa, G.L.; Meilby, H.; Fensholt, R.; Proud, S.R. Automated water extraction index: A new technique for surface water mapping using landsat imagery. Remote Sens. Environ. 2014, 140, 23–35. [Google Scholar] [CrossRef]
- Rokni, K.; Ahmad, A.; Selamat, A.; Hazini, S. Water feature extraction and change detection using multitemporal landsat imagery. Remote Sens. 2014, 6, 4173–4189. [Google Scholar] [CrossRef]
- McKay, P.; Blain, C.A. An automated approach to extracting river bank locations from aerial imagery using image texture. River Res. Appl. 2015, 30, 1048–1055. [Google Scholar] [CrossRef]
- Kallio, K.; Attila, J.; Härmä, P.; Koponen, S.; Pulliainen, J.; Hyytiäinen, U.-M.; Pyhälahti, T. Landsat ETM+ images in the estimation of seasonal lake water quality in boreal river basins. Environ. Manag. 2008, 42, 511–522. [Google Scholar] [CrossRef] [PubMed]
- Dillabaugh, C.R.; Niemann, K.O.; Richardson, D.E. Semi-automated extraction of rivers from digital imagery. GeoInformatica 2002, 6, 263–284. [Google Scholar] [CrossRef]
- Jensen, J.R. Introductory Digital Image Processing: A Remote Sensing Perspective, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- Lau, T.Y.; Franklin, W.R. River network completion without height samples using geometry-based induced terrain. Cartogr. Geogr. Inf. Sci. 2013, 40, 316–325. [Google Scholar] [CrossRef]
- Zhang, Y. A method for continuous extraction of multispectrally classified urban rivers. Photogramm. Eng. Remote Sens. 2000, 66, 991–999. [Google Scholar]
- Mason, D.C.; Scott, T.R.; Wang, H.-J. Extraction of tidal channel networks from airborne scanning laser altimetry. ISPRS J. Photogramm. Remote Sens. 2006, 61, 67–83. [Google Scholar] [CrossRef]
- Yang, K.; Li, M.; Liu, Y.; Cheng, L.; Huang, Q.; Chen, Y. River detection in remotely sensed imagery using gabor filtering and path opening. Remote Sens. 2015, 7, 8779–8802. [Google Scholar] [CrossRef]
- Gonzalez, R.C.; Woods, R.E.; Eddins, S.L. Digital Image Processing Using Matlab; Tata McGraw Hill Education: Noida, UP, India, 2010. [Google Scholar]
- Mohammadzadeh, A.; Zoej, M.J.V. A self-organizing fuzzy segmentation (SOFS) method for road detection from high resolution satellite images. Photogramm. Eng. Remote Sens. 2010, 76, 27–35. [Google Scholar] [CrossRef]
- Isodata, A Novel Method of Data Analysis and Pattern Classification. Available online: www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=AD0699616 (accessed on 19 August 2015).
- Matlab Statistics and Machine Learning Toolbox: Dendrogram. Available online: http://www.mathworks.com/help/stats/dendrogram.html (accessed on 19 August 2015).
- Burt, P.J.; Adelson, E.H. The laplacian pyramid as a compact image code. IEEE Trans. Commun. 1983, 31, 532–540. [Google Scholar] [CrossRef]
- Klemenjak, S.; Waske, B.; Valero, S.; Chanussot, J. Automatic detection of rivers in high-resolution SAR data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1364–1372. [Google Scholar] [CrossRef]
- Matlab and Octave Functions for Computer Vision and Image Processing. Available online: http://www.csse.uwa.edu.au/~pk/research/matlabfns/ (accessed on 19 August 2015).
- Zeng, C.; Wang, J.; Lehrbass, B. An evaluation system for building footprint extraction from remotely sensed data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1640–1652. [Google Scholar] [CrossRef]
- Hu, X.; Li, Y.; Shan, J.; Zhang, J.; Zhang, Y. Road centerline extraction in complex urban scenes from lidar data based on multiple features. IEEE Trans. Geosci. Remote Sens. 2014, 52, 7448–7456. [Google Scholar]
- Pavelsky, T.M.; Smith, L.C. Rivwidth: A software tool for the calculation of river widths from remotely sensed imagery. IEEE Geosci. Remote Sens. Lett. 2008, 5, 70–73. [Google Scholar] [CrossRef]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, C.; Bird, S.; Luce, J.J.; Wang, J. A Natural-Rule-Based-Connection (NRBC) Method for River Network Extraction from High-Resolution Imagery. Remote Sens. 2015, 7, 14055-14078. https://doi.org/10.3390/rs71014055
Zeng C, Bird S, Luce JJ, Wang J. A Natural-Rule-Based-Connection (NRBC) Method for River Network Extraction from High-Resolution Imagery. Remote Sensing. 2015; 7(10):14055-14078. https://doi.org/10.3390/rs71014055
Chicago/Turabian StyleZeng, Chuiqing, Stephen Bird, James J. Luce, and Jinfei Wang. 2015. "A Natural-Rule-Based-Connection (NRBC) Method for River Network Extraction from High-Resolution Imagery" Remote Sensing 7, no. 10: 14055-14078. https://doi.org/10.3390/rs71014055
APA StyleZeng, C., Bird, S., Luce, J. J., & Wang, J. (2015). A Natural-Rule-Based-Connection (NRBC) Method for River Network Extraction from High-Resolution Imagery. Remote Sensing, 7(10), 14055-14078. https://doi.org/10.3390/rs71014055