
Automatic Detection and Classification of Pole-Like Objects in Urban Point Cloud Data Using an Anomaly Detection Algorithm



Abstract
:
1. Introduction
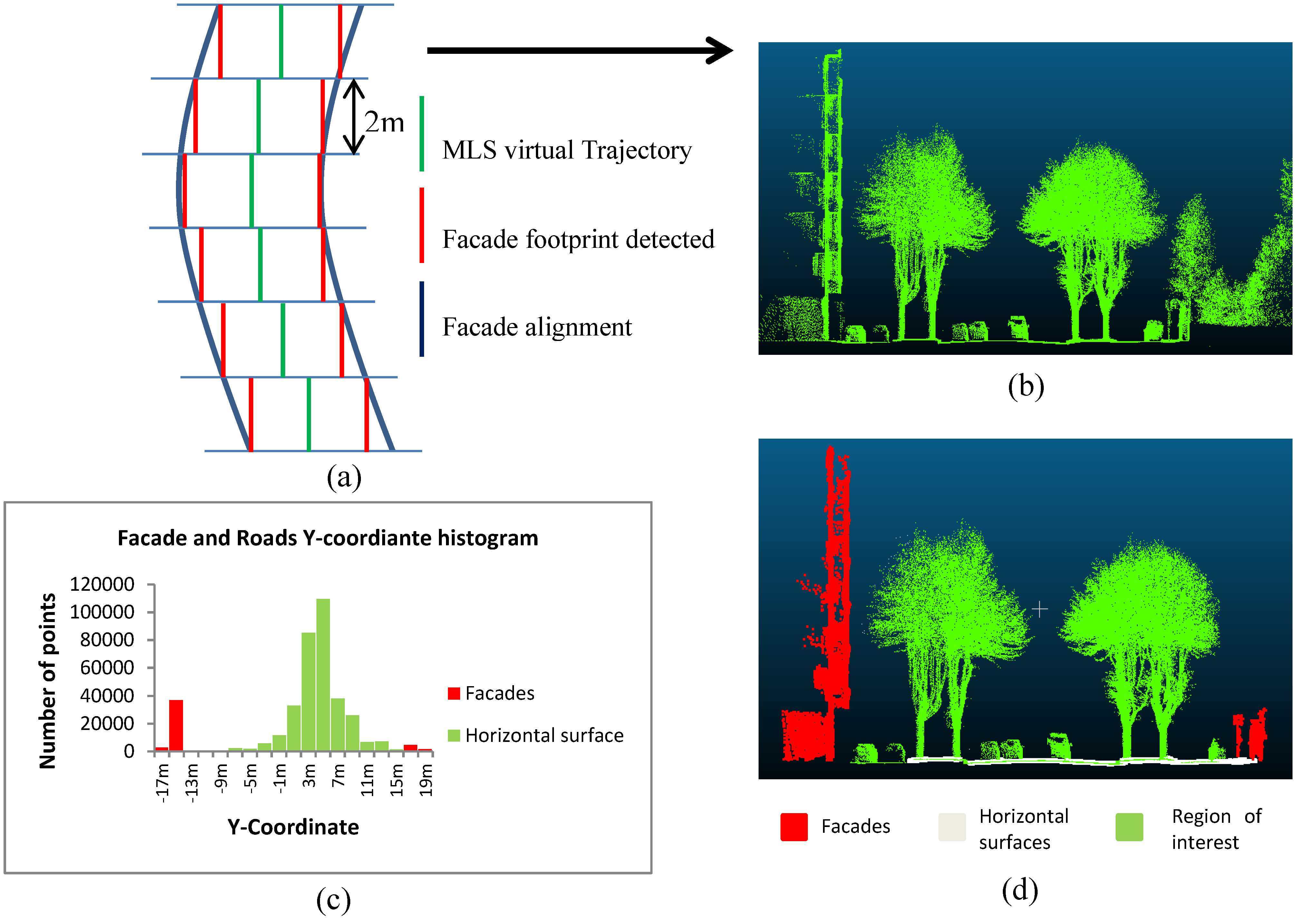
- A preprocessing stage, including a reference frame transformation and a region of interest (ROI) isolation. These procedures diminish the size of the original point cloud, the number of false positives in the following procedures, and the computational effort of the successive stages.
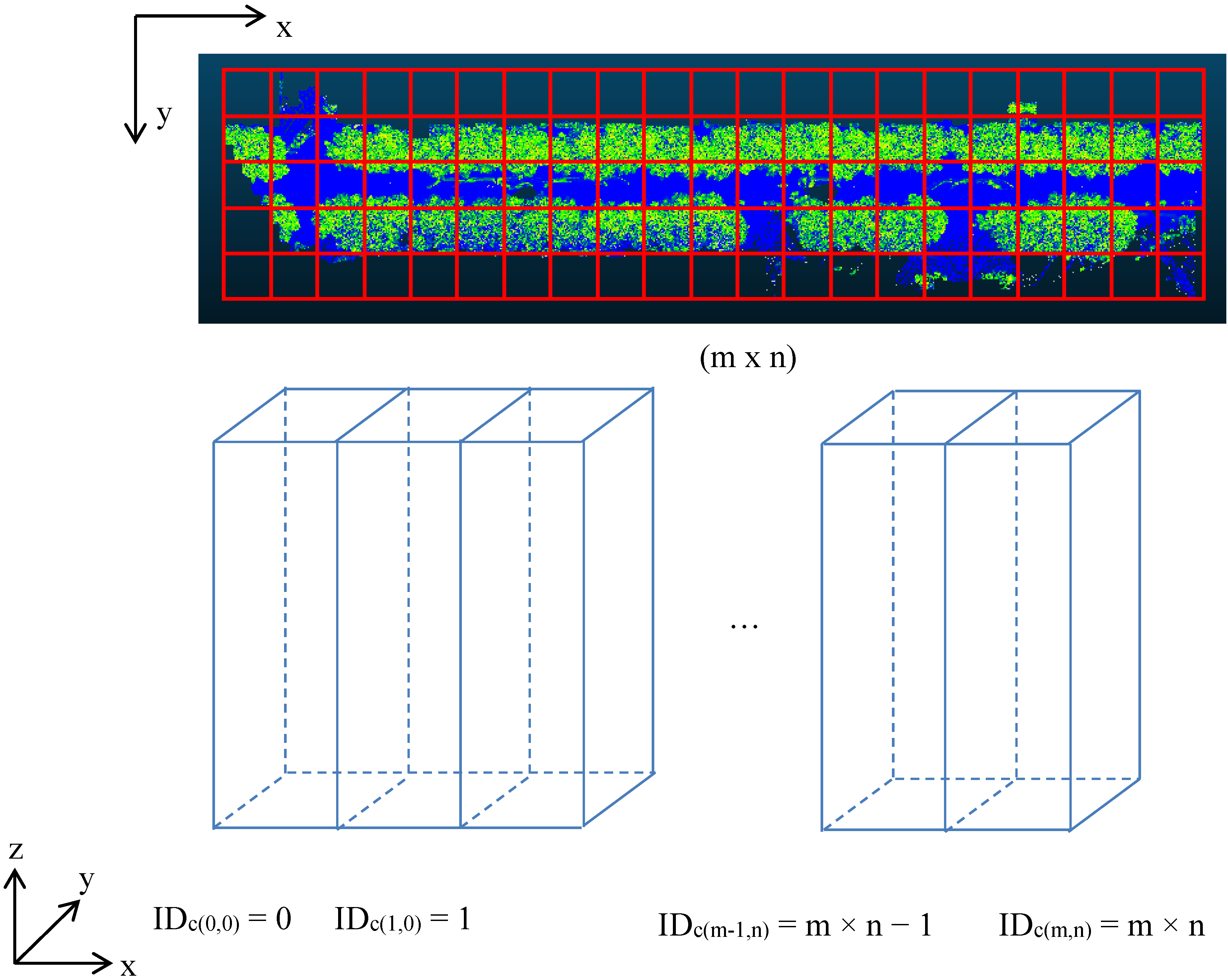
- Vertical urban elements detection using the Reed and Xiaoli (RX) anomaly detection algorithm. Previously the preprocessed point cloud is organized in a pillar structure.
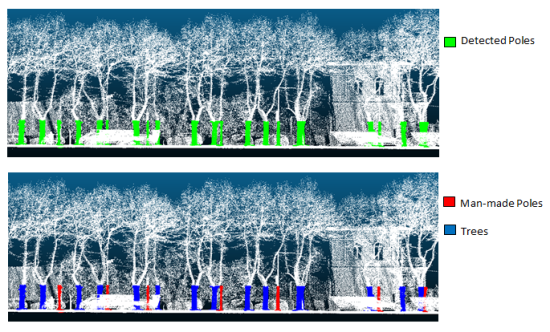
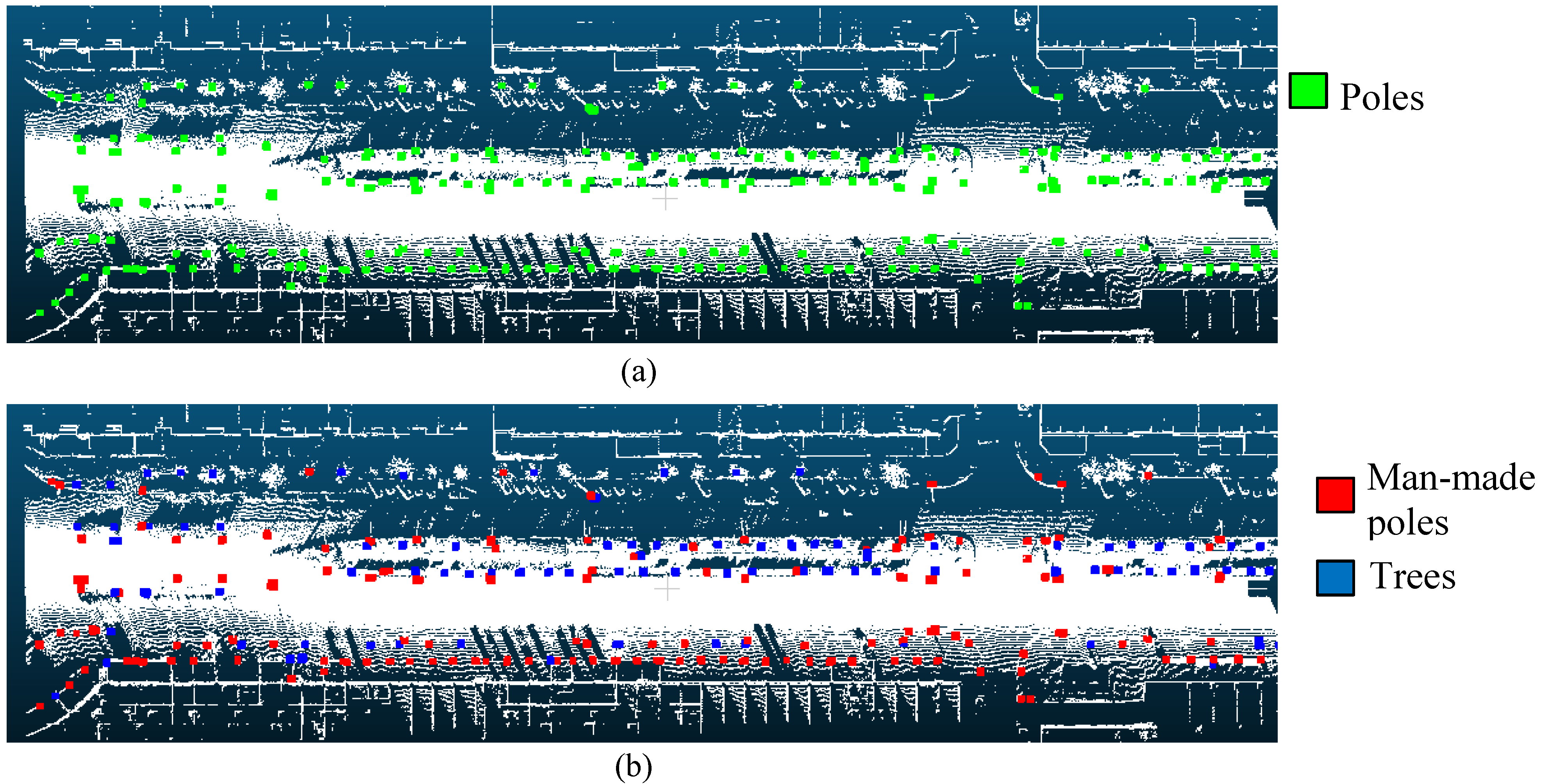
- Vertical elements classification into two classes (trees and man-made poles) using an unsupervised classification algorithm.
2. Method
2.1. Preprocessing
2.1.1. Reference Frame Transformation
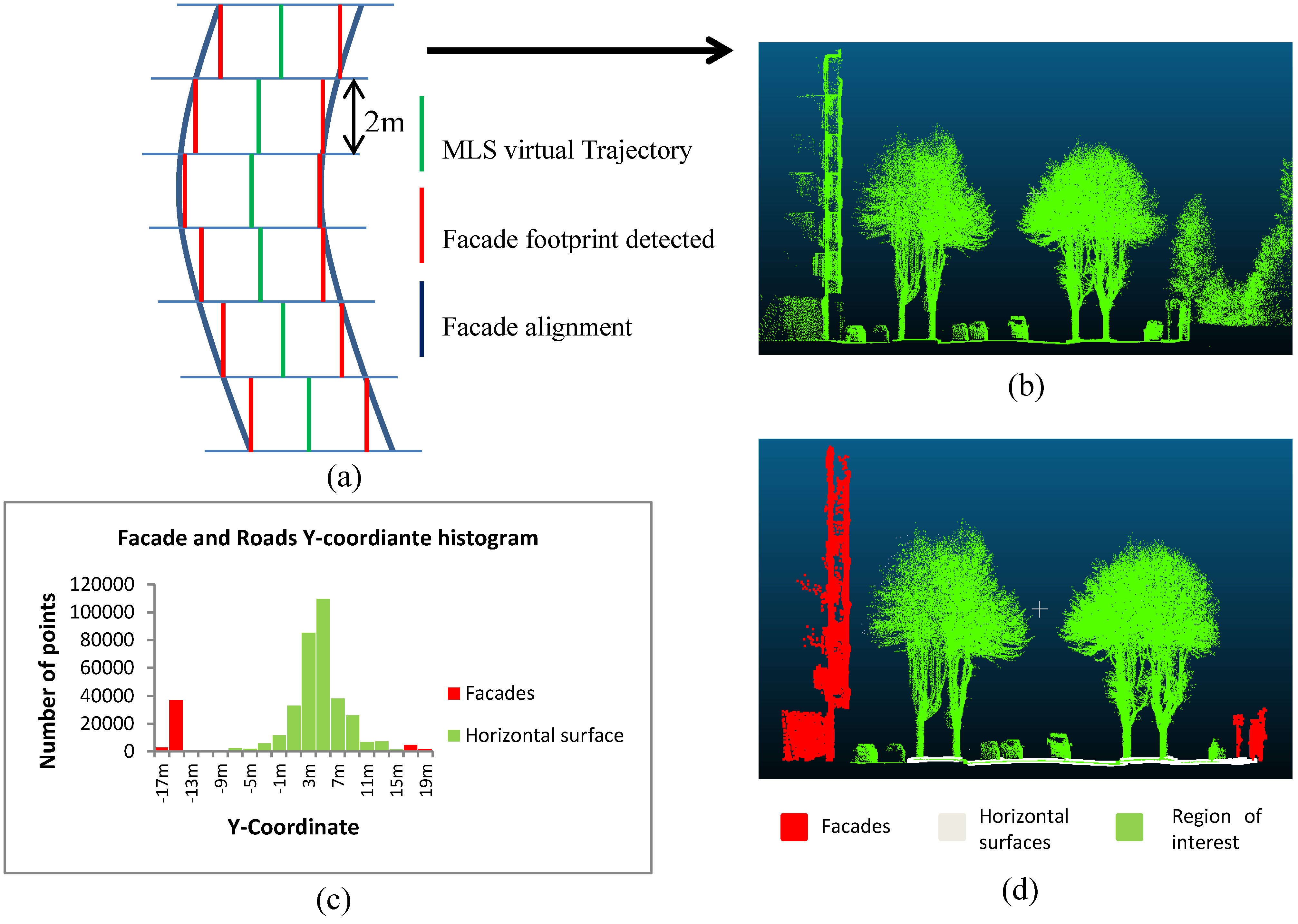
2.1.2. Removing Uninteresting Points
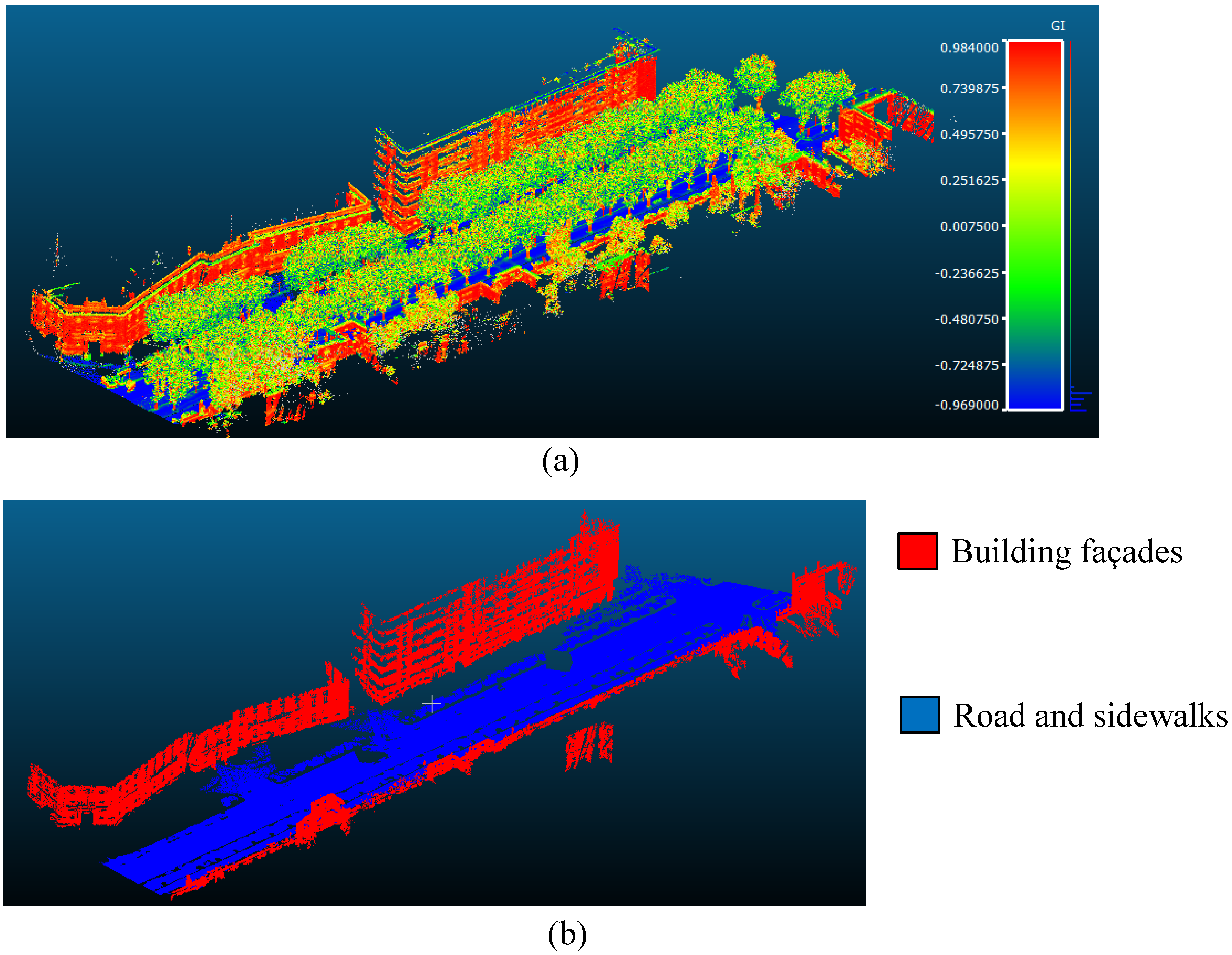
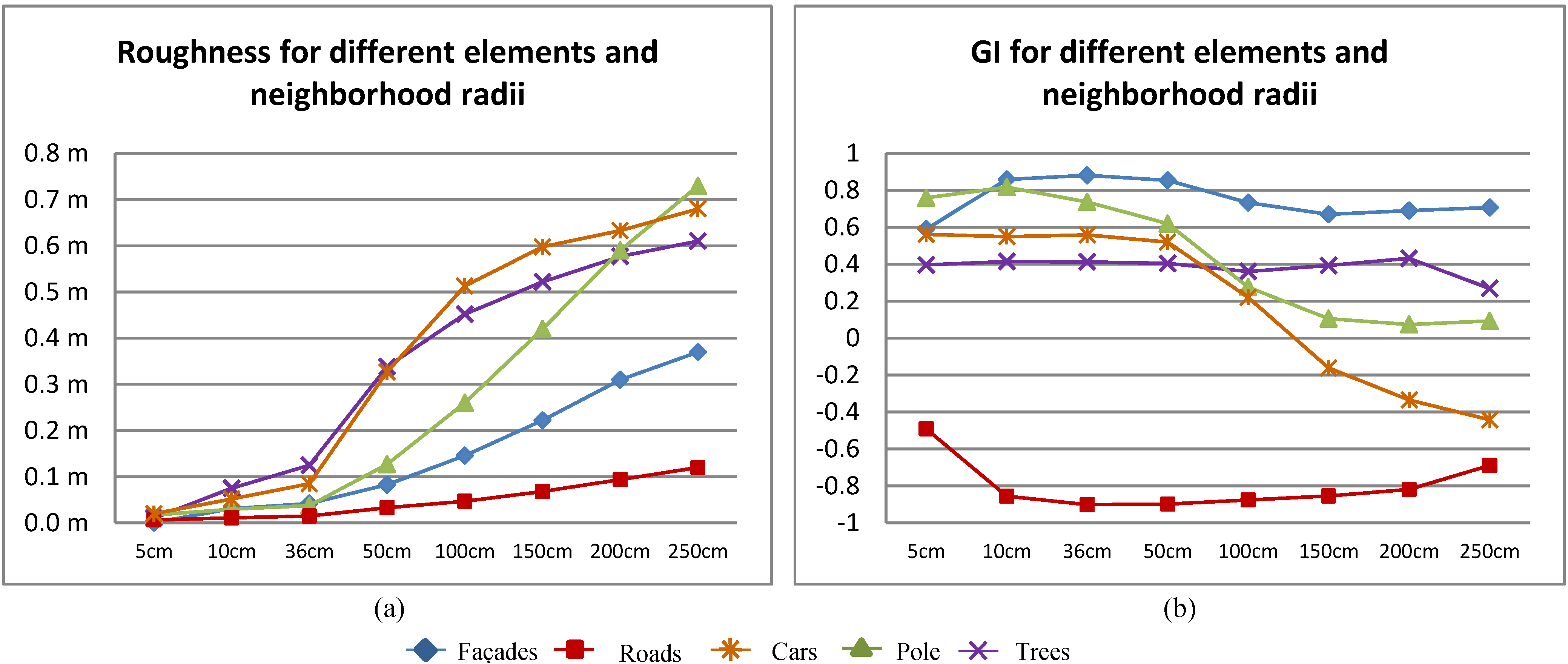
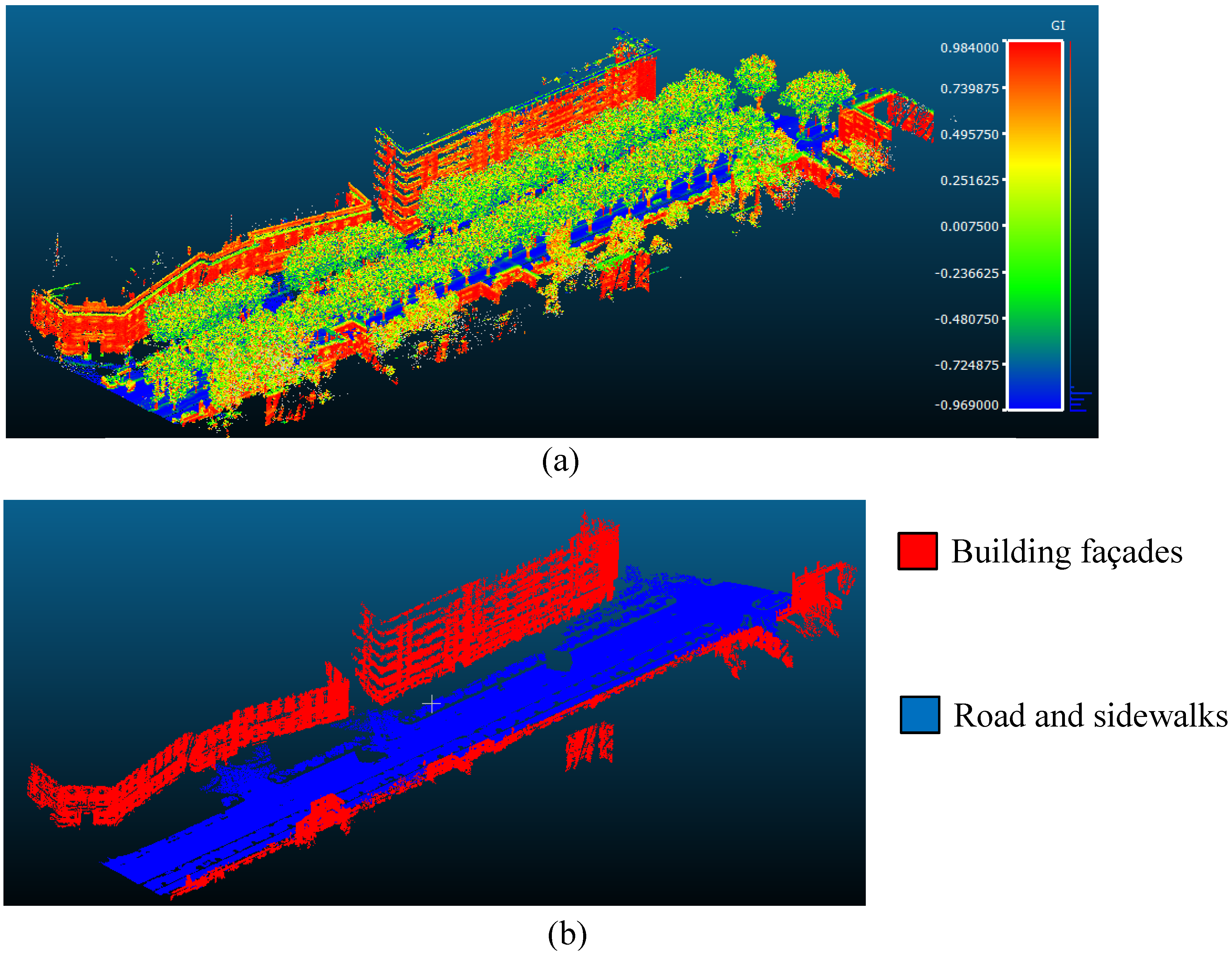
Geometric Index Definition
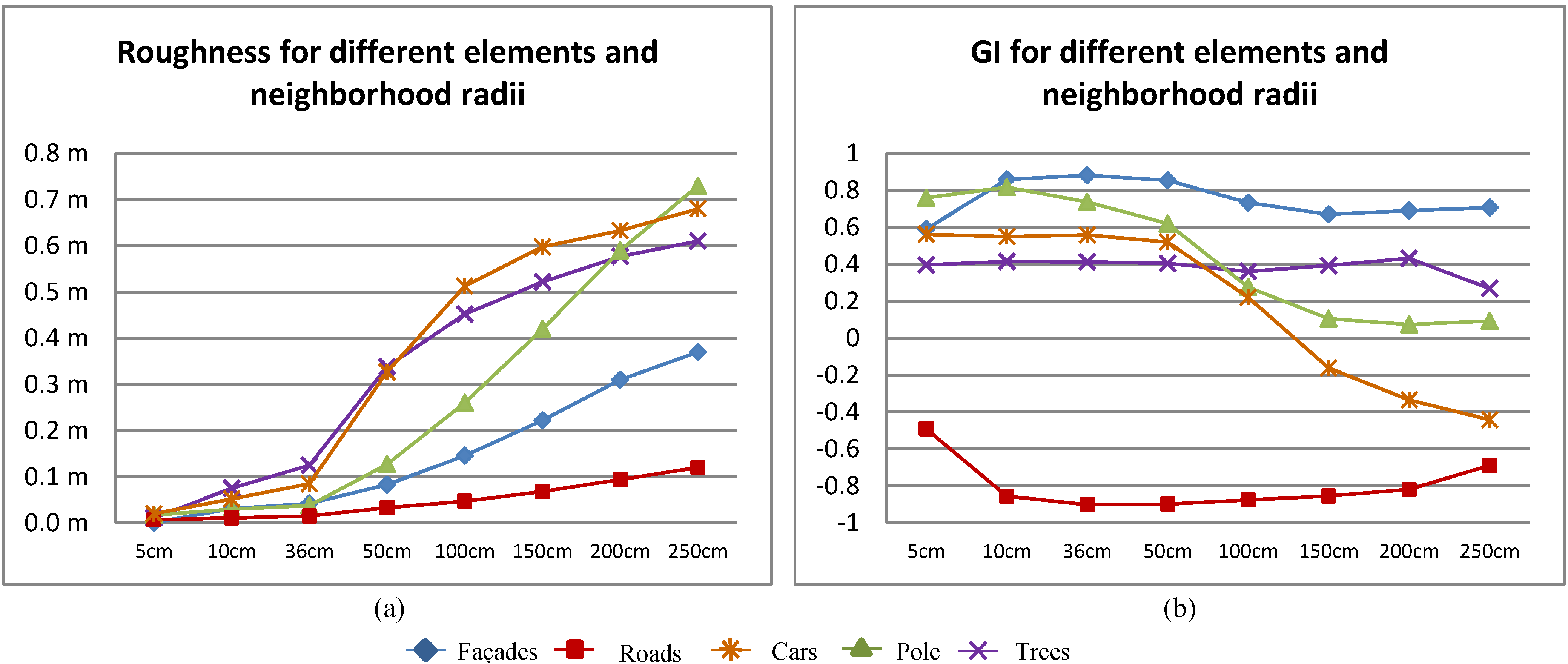
Extraction of Vertical and Horizontal Surfaces
Original Point Cloud Reduction
2.2. Pole-Like Elements Detection
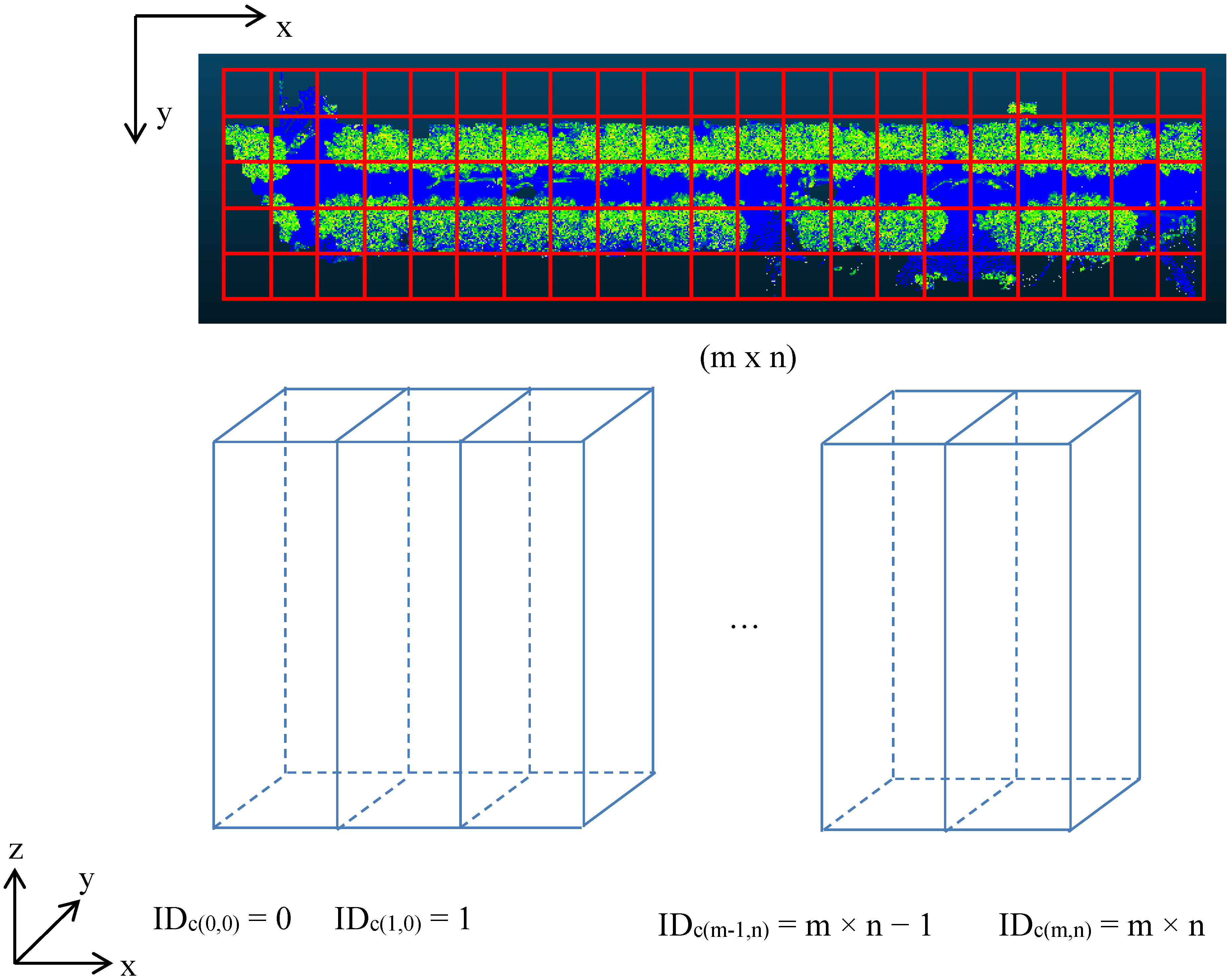
2.2.1. Point Cloud Structuring
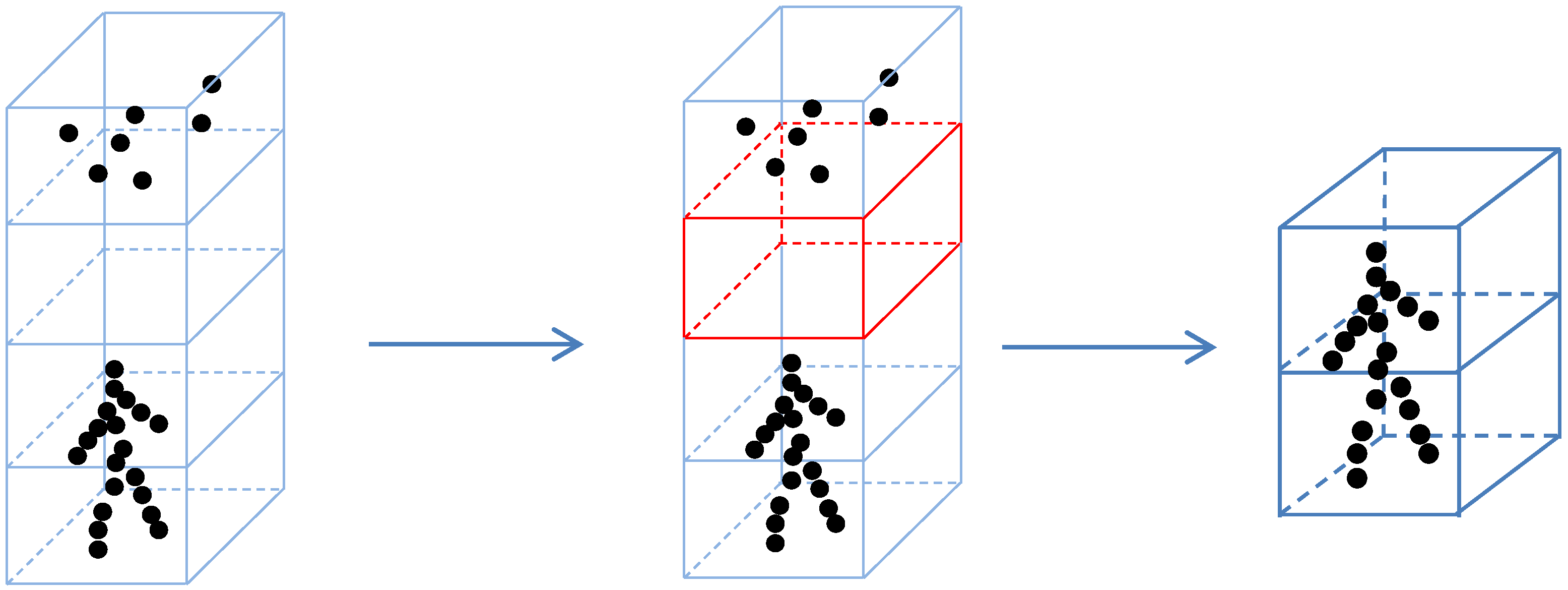
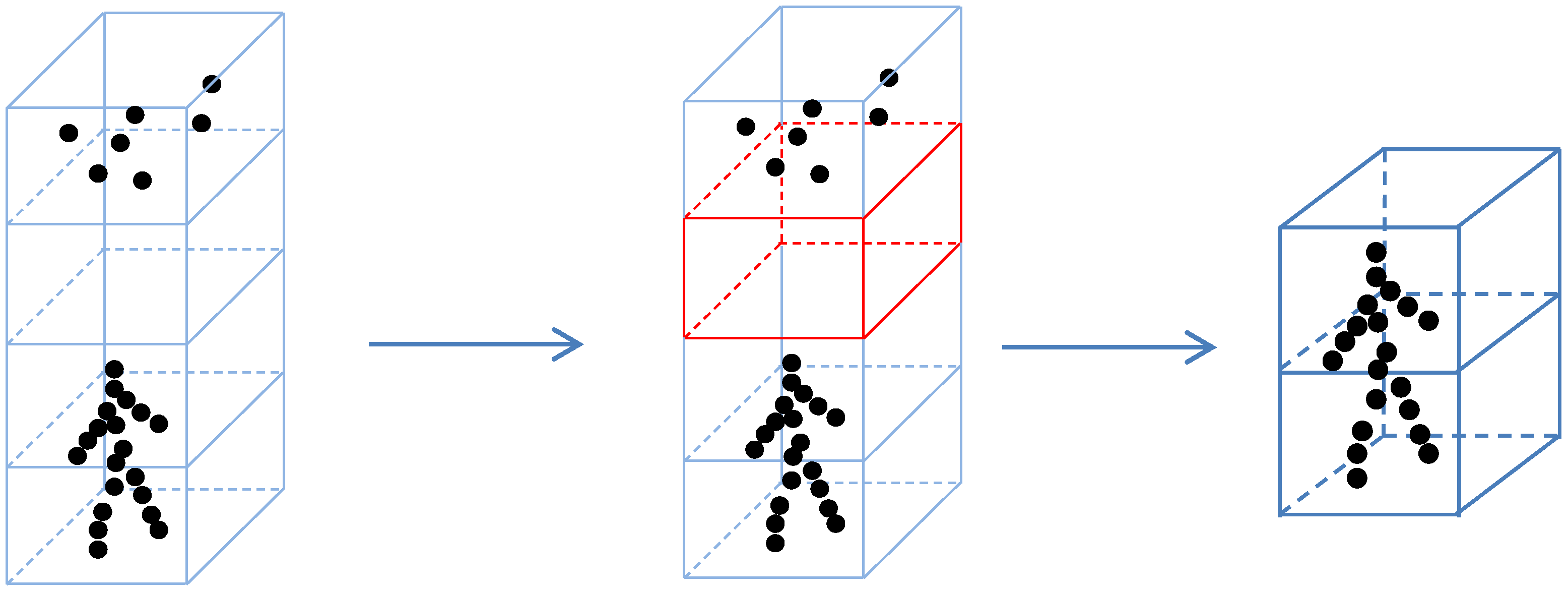
2.2.2. RX Anomaly Detection Algorithm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ΔH (m) | σx (m) | σy (m) | |
|---|---|---|---|
| Ground Truth Horizontal surfaces | 0.044 | 0.141 | 0.140 |
| Ground Truth Vertical elements | 2.78 | 0.103 | 0.098 |
| Full pillars average | 0.151 | 0.136 | 0.134 |
| P90 | 1.16 | 0.129 | 0.114 |
| P95 | 1.64 | 0.121 | 0.103 |
| P99 | 2.96 | 0.106 | 0.102 |
| ΔH | σx | σy | |
|---|---|---|---|
| RX | 0.72 | −0.44 | −0.57 |
2.3. Pole-Like Elements Classification
| Test Case | µr poles-trees | poles-trees | poles-trees |
|---|---|---|---|
| Dataset A | 1.51 | 1.76 | 1.72 |
| Dataset B | 1.52 | 1.88 | 1.53 |
3. Test Cases
3.1. Mapping Data
3.1.1. Dataset A
3.1.2. Dataset B
3.2. Reference Data
3.3. Algorithm Settings
| Algorithm Settings | Parameter Ranges | |
|---|---|---|
| Vertical surfaces threshold (αV) | 0.8 | [0.75; 0.85] |
| Horizontal surfaces threshold (αH) | −0.8 | [−0.9; −0.7] |
| Minimum number of points (MINP) | 2000 points | [2000; 3000] |
| Octree level (OL) | 20 cm | [15cm ; 25cm] |
| Pillar size | 0.5m | [0.4m; 0.6m] |
| RX Percentile | P99 | [P98.5; P99] |
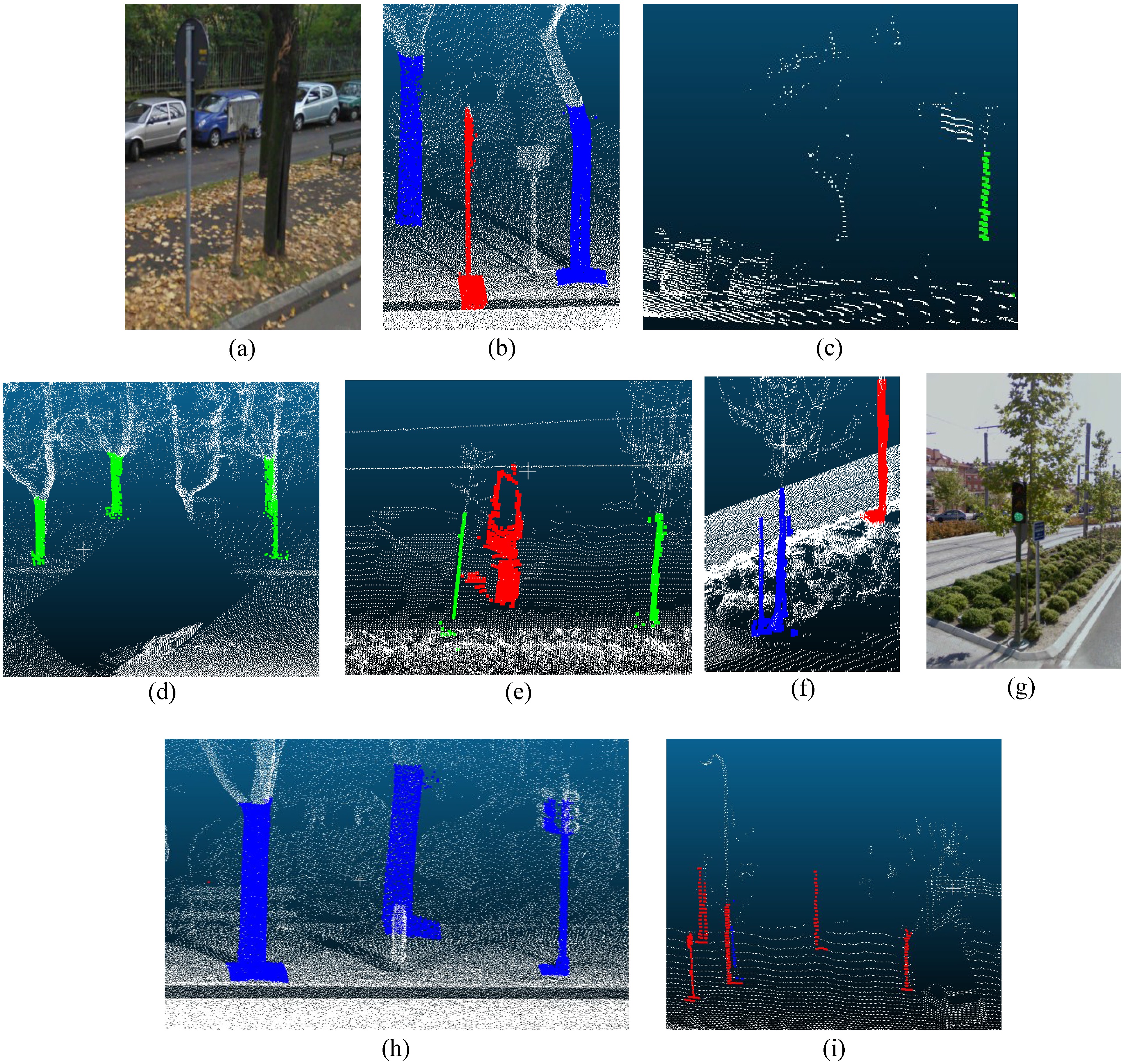
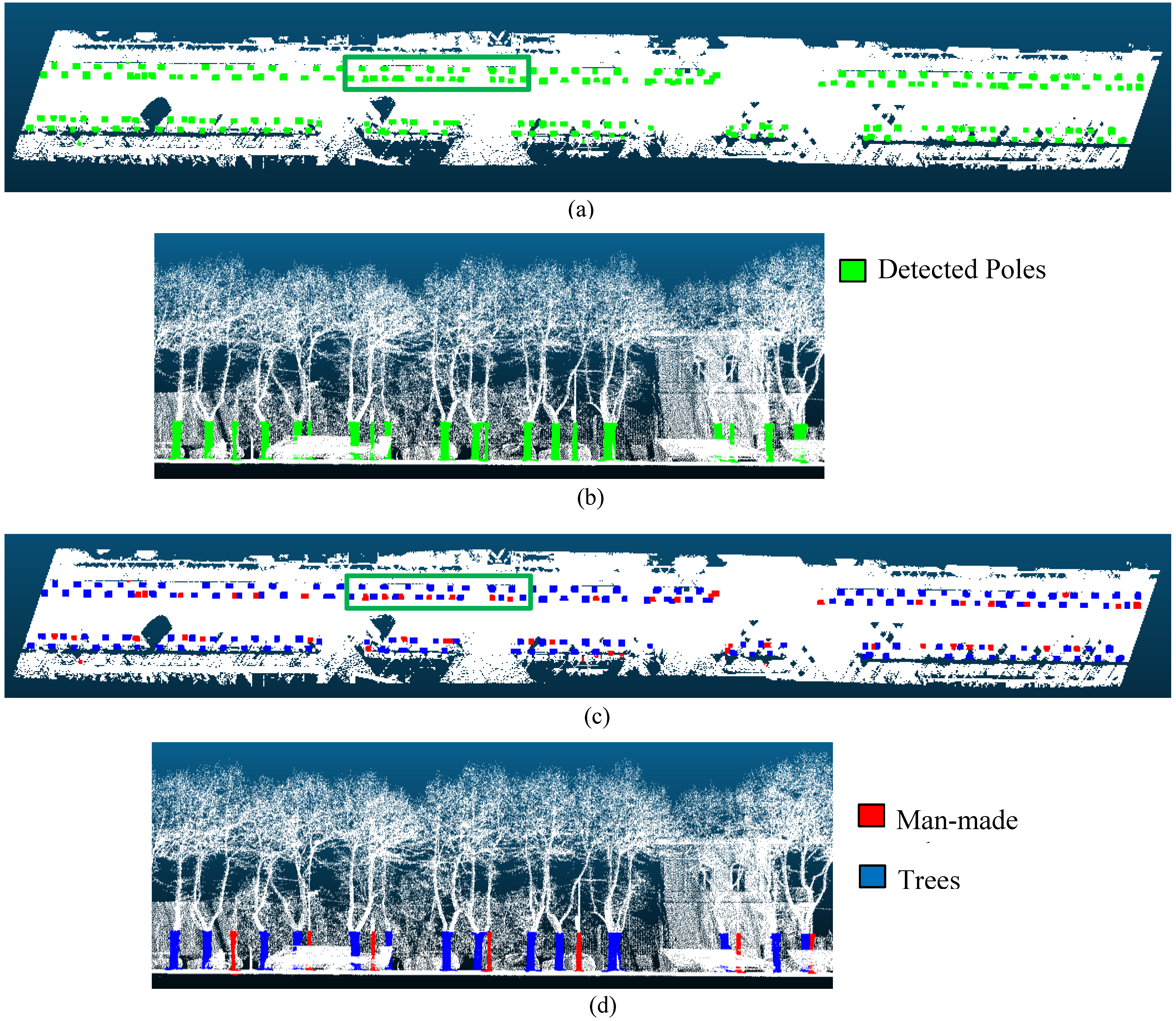
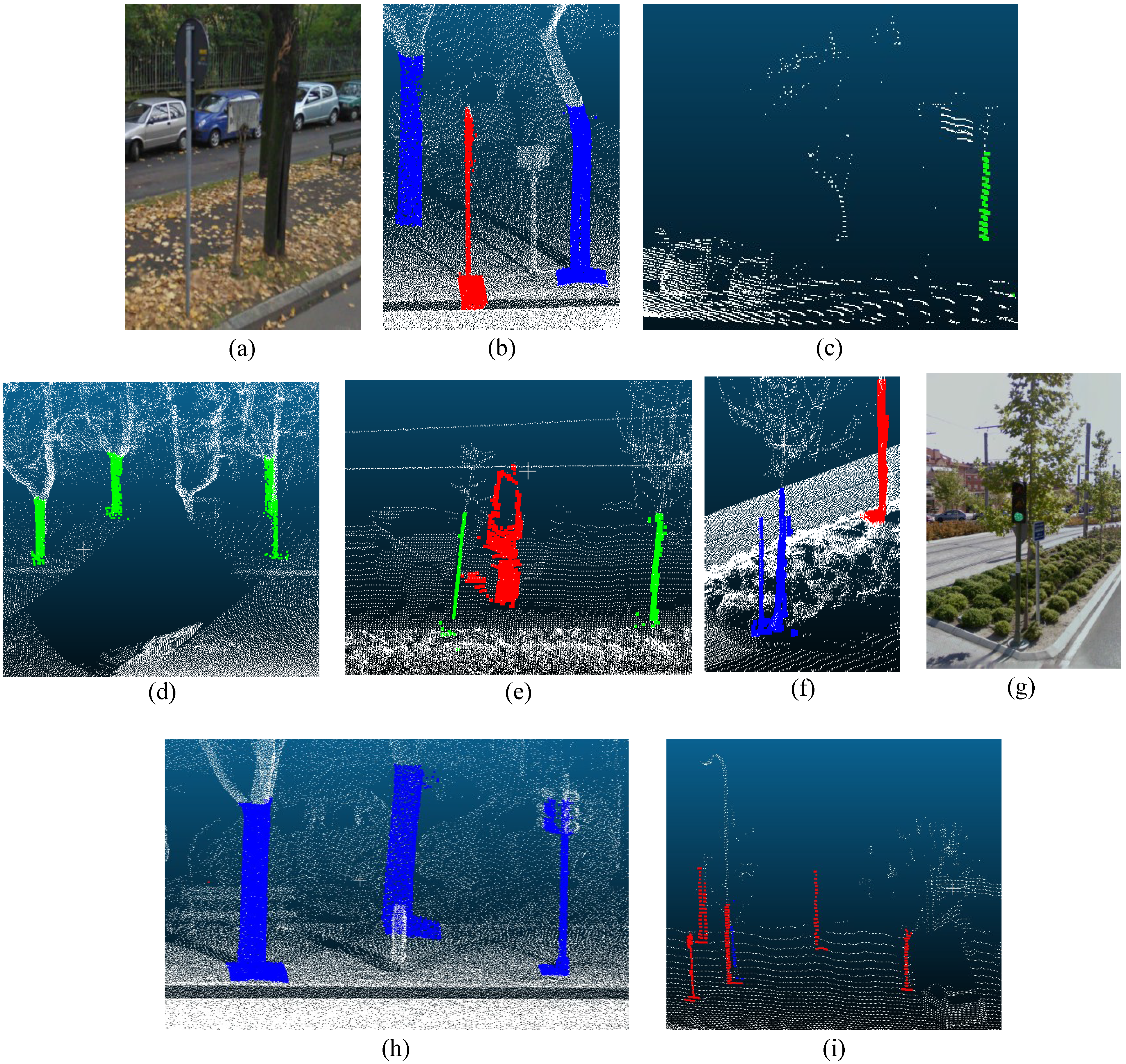
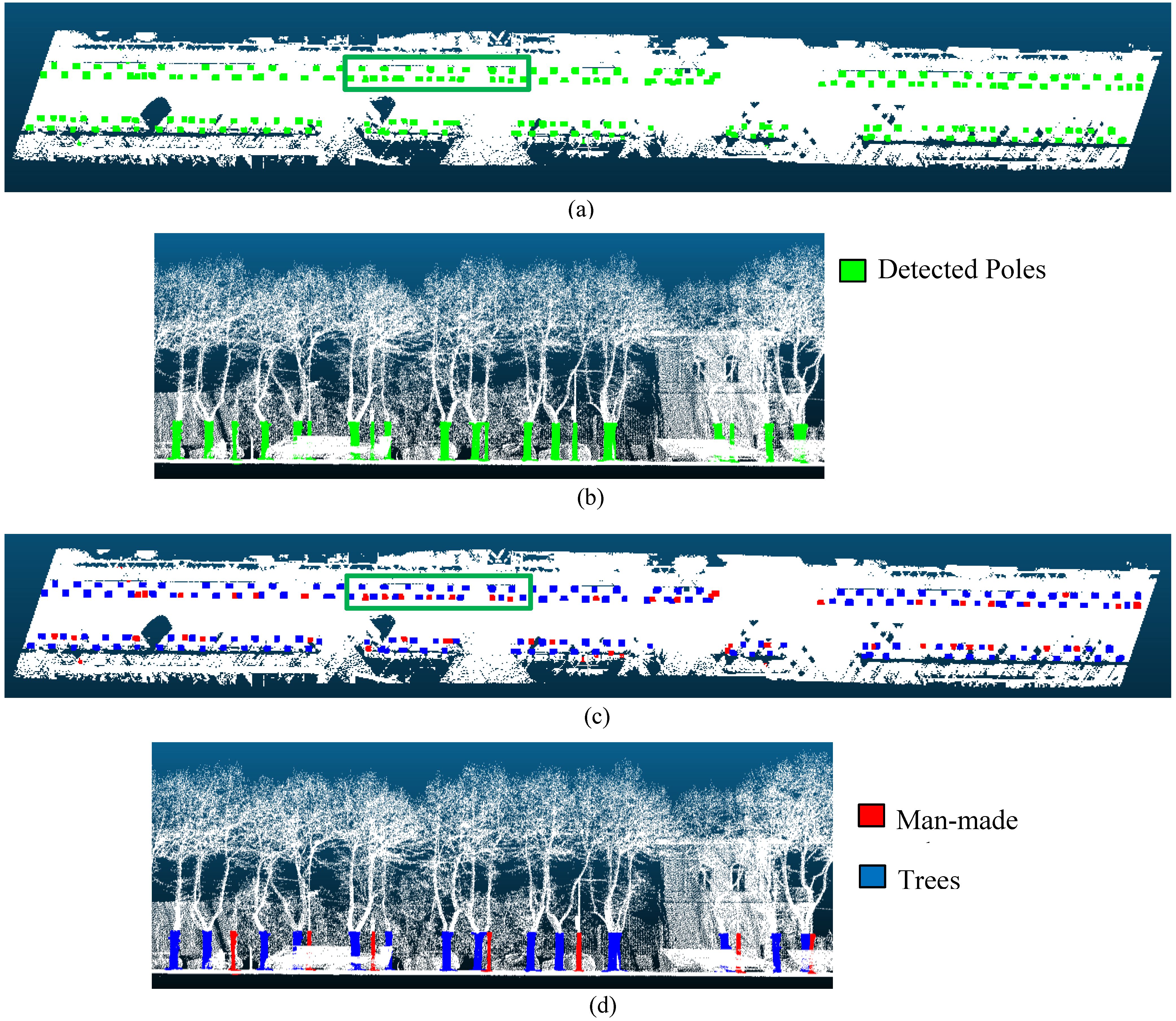
4. Results
4.1. Dataset A

| Test Site A/RX Percentile | Observed | Detected | FP | FN | TP | Completeness | Correctness | Quality |
| 97.5 | 241 | 347 | 111 | 5 | 236 | 97.93 | 68.01 | 67.05 |
| 98 | 241 | 314 | 78 | 5 | 236 | 97.93 | 75.16 | 73.98 |
| 98.5 | 241 | 252 | 17 | 6 | 235 | 97.51 | 93.25 | 91.09 |
| 99 | 241 | 233 | 3 | 11 | 230 | 95.4 | 98.7 | 94.3 |
| 99.5 | 241 | 144 | 2 | 99 | 142 | 58.92 | 98.61 | 58.44 |
| Test Site B/RX Percentile | Observed | Detected | FP | FN | TP | Completeness | Correctness | Quality |
| 97.5 | 228 | 359 | 136 | 5 | 223 | 97.81 | 60.43 | 61.26 |
| 98 | 228 | 314 | 91 | 5 | 223 | 97.81 | 68.83 | 69.91 |
| 98.5 | 228 | 244 | 21 | 5 | 223 | 97.81 | 91.39 | 89.56 |
| 99 | 228 | 222 | 2 | 8 | 220 | 96.5 | 99.1 | 95.7 |
| 99.5 | 228 | 119 | 1 | 110 | 118 | 51.75 | 99.16 | 51.53 |
| Dataset A | Trees | Poles | Σ | |
| Trees | 85 | 5 | 90 | |
| Poles | 8 | 132 | 140 | |
| Σ | 93 | 137 | 230 | |
| Overall Accuracy = 94.35% (217/230) | ||||
| Dataset A | Commission | Omission | ||
| Trees | 5.56% (5/90) | 8.6% (8/93) | ||
| Poles | 5.71% (8/140) | 3.65% (5/137) | ||
| Producer’s Accuracy | User’s Accuracy | |||
| Trees | 91.4% (85/93) | 94.44% (85/90) | ||
| Poles | 96.35% (132/137) | 94.29% (132/140) | ||
| Observed | Detected | FP | Undetected | Correctly Labeled | Wrongly Labeled | Accuracy | |
|---|---|---|---|---|---|---|---|
| Test site A | 241 | 233 | 3 | 11 | 217 | 13 | 90.04 (217/241) |
| Test site B | 228 | 222 | 2 | 8 | 209 | 11 | 91.67 (209/228) |
4.2. Dataset B
| Dataset B | Trees | Poles | Σ | |
| Trees | 156 | 10 | 166 | |
| Poles | 1 | 53 | 54 | |
| Σ | 157 | 63 | 220 | |
| Overall Accuracy = 95.0% (209/220) | ||||
| Dataset B | Commission | Omission | ||
| Trees | 6.02% (10/166) | 0.63% (1/157) | ||
| Poles | 1.85% (1/54) | 15.87% (10/63) | ||
| Producer’s Accuracy | User’s Accuracy | |||
| Trees | 99.36% (156/157) | 93.98% (156/166) | ||
| Poles | 84.13% (53/63) | 98.15% (53/54) | ||
4.3. Comparison with Previous Methods
5. Conclusions and Future Works
Acknowledgments
Author Contributions
Conflicts of Interest
References and Notes
- Mundia, C.; Aniya, M. Analysis of land use/cover changes and urban expansion of Nairobi city using remote sensing and GIS. Int. J. Remote Sens. 2005, 26, 2831–2849. [Google Scholar] [CrossRef]
- Dimitrakopoulos, G.; Demestichas, P. Intelligent transportation systems. IEEE Veh. Technol. Mag. 2010, 5, 77–84. [Google Scholar] [CrossRef]
- Levinson, J.; Askeland, J.; Becker, J.; Dolson, J.; Held, D.; Kammel, S.; Kolter, J.Z.; Langer, D.; Pink, O.; Pratt, V. Towards fully autonomous driving: Systems and algorithms. In Proceedings of IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 163–168.
- Jiang, X.; Bunke, H. Fast segmentation of range images into planar regions by scan line grouping. Machine Vis. Appl. 1994, 7, 115–122. [Google Scholar] [CrossRef]
- Hyyppä, J.; Jaakkola, A.; Chen, Y.; Kukko, A. Unconventional LiDAR mapping from air, terrestrial and mobile. In Proceedings of the Photogrammetric Week, Stuttgart, Germany, 9–13 September 2013; pp. 205–214.
- Zogg, H.; Ingensand, H. Terrestrial laser scanning for deformation monitoring—Load tests on the Felsenau Viaduct (CH). Int. Arch. Photogramm. Remote Sens. 2008, 37, 555–562. [Google Scholar]
- Rüther, H.; Held, C.; Bhurtha, R.; Schröder, R.; Wessels, S. Challenges in heritage documentation with terrestrial laser scanning. In Proceedings of the 1st AfricaGEO Conference, Capetown, South Africa, 30 May–2 June 2011.
- Zhu, L.; Hyyppa, J. The use of airborne and mobile laser scanning for modeling railway environments in 3D. Remote Sens. 2014, 6, 3075–3100. [Google Scholar] [CrossRef]
- Vosselman, G.; Gorte, B.G.; Sithole, G.; Rabbani, T. Recognising structure in laser scanner point clouds. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 46, 33–38. [Google Scholar]
- Douillard, B.; Underwood, J.; Kuntz, N.; Vlaskine, V.; Quadros, A.; Morton, P.; Frenkel, A. On the segmentation of 3D LiDAR point clouds. In Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 2798–2805.
- Yang, B.; Fang, L.; Li, J. Semi-automated extraction and delineation of 3D roads of street scene from mobile laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2013, 79, 80–93. [Google Scholar] [CrossRef]
- Rodríguez-Cuenca, B.; García-Cortés, S.; Ordóñez, C.; Alonso, M.C. An approach to detect and delineate street curbs from MLS 3D point cloud data. Autom. Constr. 2015, 51, 103–112. [Google Scholar] [CrossRef]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens. 2010, 65, 514–522. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Performance analysis of a pole and tree trunk detection method for mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 197–202. [Google Scholar] [CrossRef]
- Yujie, H.; Xiang, L.; Jun, X.; Lei, G. A novel approach to extracting street lamps from vehicle-borne laser data. In Proceedings of 19th International Conference on Geoinformatics, Shanghai, China, 24–26 June 2011; pp. 1–6.
- Rabbani, T.; van den Heuvel, F.; Vosselmann, G. Segmentation of point clouds using smoothness constraint. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36, 248–253. [Google Scholar]
- Golovinskiy, A.; Funkhouser, T. Min-cut based segmentation of point clouds. In Proceedings of IEEE 12th International Conference on Computer Vision Workshops (ICCV Workshops), Kyoto, Japan, 27 September–4 October 2009; pp. 39–46.
- Belton, D.; Lichti, D.D. Classification and segmentation of terrestrial laser scanner point clouds using local variance information. In Proceedings of ISPRS Commission V Symposium: Image Engineering and Vision Metrology (IAPRS), Dresden, Germany, 25–27 September 2006.
- Verma, V.; Kumar, R.; Hsu, S. 3D building detection and modeling from aerial LiDAR data. In Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, USA, 17–22 June 2006; pp. 2213–2220.
- City of Melbourne Street Furniture Plan. Available online: http://www.melbourne.vic.gov.au/ (accessed on 22 June 2015).
- Rabbani, T.; Van Den Heuvel, F. Efficient hough transform for automatic detection of cylinders in point clouds. In Proceedings of ISPRS Workshop: Laser Scanning 2005, Enschede, The Netherlands, 12–14 September 2005; pp. 60–65.
- Schnabel, R.; Wahl, R.; Klein, R. Efficient RANSAC for point-cloud shape detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Cabo, C.; Ordoñez, C.; García-Cortés, S.; Martínez, J. An algorithm for automatic detection of pole-like street furniture objects from mobile laser scanner point clouds. ISPRS J. Photogramm. Remote Sens. 2014, 87, 47–56. [Google Scholar] [CrossRef]
- Brenner, C. Extraction of features from mobile laser scanning data for future driver assistance systems. In Advances in Giscience; Springer: Berlin/Heidelberg, Germany, 2009; pp. 25–42. [Google Scholar]
- El-Halawany, S.I.; Lichti, D.D. Detection of road poles from mobile terrestrial laser scanner point cloud. In Proceedings of International Workshop on Multi-Platform/Multi-Sensor Remote Sensing and Mapping (M2RSM), Xiamen, China, 10–12 January 2011; pp. 1–6.
- Yokoyama, H.; Date, H.; Kanai, S.; Takeda, H. Pole-like objects recognition from mobile laser scanning data using smoothing and principal component analysis. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 115–120. [Google Scholar] [CrossRef]
- Rutzinger, M.; Pratihast, A.; Oude Elberink, S.; Vosselman, G. Detection and modelling of 3D trees from mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 520–525. [Google Scholar]
- Li, D.; Elberink, S.O. Optimizing detection of road furniture (pole-like objects) in mobile laser scanner data. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 1, 163–168. [Google Scholar] [CrossRef]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A voxel-based method for automated identification and morphological parameters estimation of individual street trees from mobile laser scanning data. Remote Sens. 2013, 5, 584–611. [Google Scholar] [CrossRef]
- Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of vertical pole-like objects in a road environment using vehicle-based laser scanning data. Remote Sens. 2010, 2, 641–664. [Google Scholar] [CrossRef]
- Yao, W.; Fan, H. Automated detection of 3D individual trees along urban road corridors by mobile laser scanning systems. In Proceedings of International Symposium on Mobile Mapping Technology (MMT), Tainan City, Taiwan, 1–3 May 2013.
- Yu, Y.; Li, J.; Guan, H.; Wang, C.; Yu, J. Semiautomated extraction of street light poles from mobile lidar point-clouds. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1374–1386. [Google Scholar] [CrossRef]
- Ioannou, Y.; Taati, B.; Harrap, R.; Greenspan, M. Difference of normals as a multi-scale operator in unorganized point clouds. In Proceedings of 2nd International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), Zurich, Switzerland, 13–15 October 2012; pp. 501–508.
- Di Stefano, L.; Bulgarelli, A. A simple and efficient connected components labeling algorithm. In Proceedings of International Conference on Image Analysis and Processing, Venice, Italy, 27–29 September 1999; pp. 322–327.
- Anagnostopoulos, C.N.E.; Anagnostopoulos, I.E.; Loumos, V.; Kayafas, E. A license plate-recognition algorithm for intelligent transportation system applications. IEEE Trans. Intell. Transp. Syst. 2006, 7, 377–392. [Google Scholar] [CrossRef]
- Hu, H.; Munoz, D.; Bagnell, J.A.; Hebert, M. Efficient 3-D scene analysis from streaming data. In Proceedings of IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 6–10 May 2013.
- Reed, I.S.; Yu, X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral distribution. IEEE Trans. Acoust. Speech Signal Process. 1990, 38, 1760–1770. [Google Scholar] [CrossRef]
- Chang, C.-I.; Chiang, S.-S. Anomaly detection and classification for hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2002, 40, 1314–1325. [Google Scholar] [CrossRef]
- Alonso, M.C.; Malpica, J.A. The combination of three statistical methods for visual inspection of anomalies in hyperspectral imageries. In Proceedings of 7th International Conference on Advances in Pattern Recognition (ICAPR), Kolkata, India, 4–6 February 2009; pp. 377–380.
- Hongchao, F.; Wei, Y.; Long, T. Identifying man-made objects along urban road corridors from mobile LiDAR data. IEEE Geosci. Remote Sens. Lett. 2014, 11, 950–954. [Google Scholar]
- Kailath, T. The divergence and Bhattacharyya distance measures in signal selection. IEEE Trans. Commun. Technol. 1967, 15, 52–60. [Google Scholar] [CrossRef]
- Puente, I.; González-Jorge, H.; Riveiro, B.; Arias, P. Accuracy verification of the Lynx mobile mapper system. Opt. Laser Technol. 2013, 45, 578–586. [Google Scholar] [CrossRef]
- Heipke, C.; Mayer, H.; Wiedemann, C.; Jamet, O. Evaluation of automatic road extraction. Int. Arch. Photogramm. Remote Sens. 1997, 32, 151–160. [Google Scholar]
- Jensen, J.R.; Lulla, K. Introductory Digital Image Processing: A Remote Sensing Perspective, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rodríguez-Cuenca, B.; García-Cortés, S.; Ordóñez, C.; Alonso, M.C. Automatic Detection and Classification of Pole-Like Objects in Urban Point Cloud Data Using an Anomaly Detection Algorithm. Remote Sens. 2015, 7, 12680-12703. https://doi.org/10.3390/rs71012680
Rodríguez-Cuenca B, García-Cortés S, Ordóñez C, Alonso MC. Automatic Detection and Classification of Pole-Like Objects in Urban Point Cloud Data Using an Anomaly Detection Algorithm. Remote Sensing. 2015; 7(10):12680-12703. https://doi.org/10.3390/rs71012680
Chicago/Turabian StyleRodríguez-Cuenca, Borja, Silverio García-Cortés, Celestino Ordóñez, and Maria C. Alonso. 2015. "Automatic Detection and Classification of Pole-Like Objects in Urban Point Cloud Data Using an Anomaly Detection Algorithm" Remote Sensing 7, no. 10: 12680-12703. https://doi.org/10.3390/rs71012680