Ontology-Based Classification of Building Types Detected from Airborne Laser Scanning Data



 and
and
Abstract
:
1. Introduction
2. Previous Work
2.1. Buildings Extraction from ALS Data
2.2. Ontology Approaches in GIScience and Remote Sensing
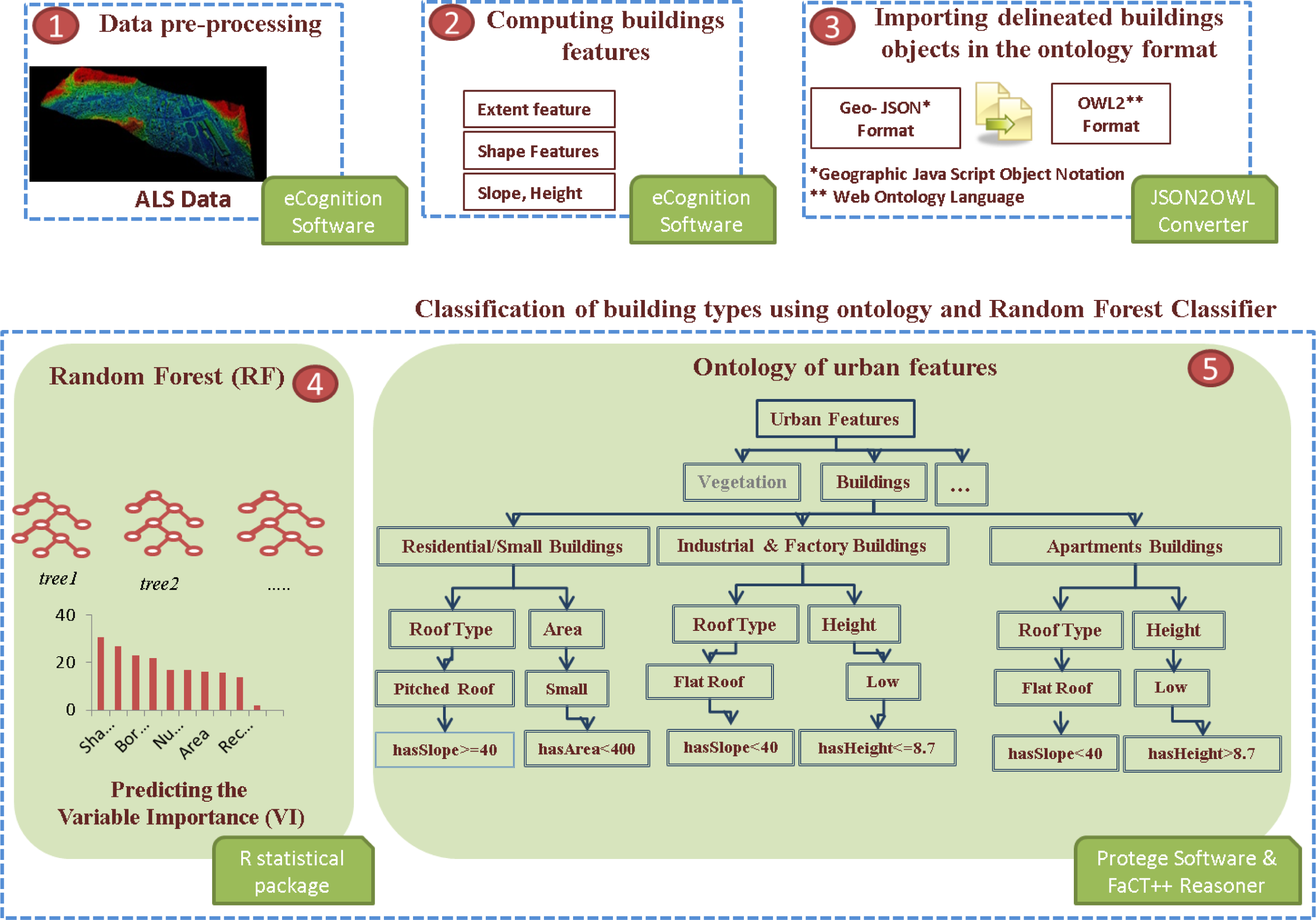
3. Methodology
3.1. Preprocessing Step: Automatic Extraction of Buildings from ALS Data
3.2. Classification of Building Types Data Using Ontology and Random Forest Classifier
3.2.1. Knowledge Acquisition and Conceptualization
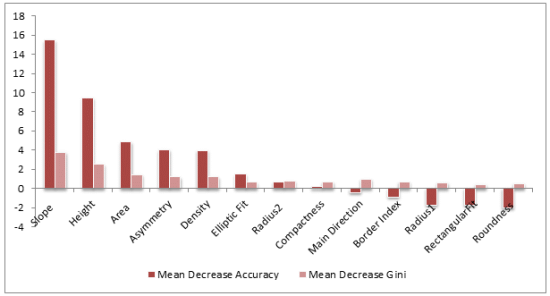
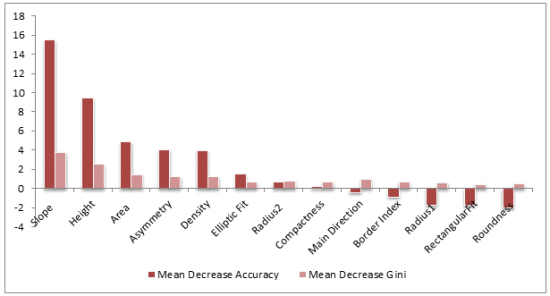
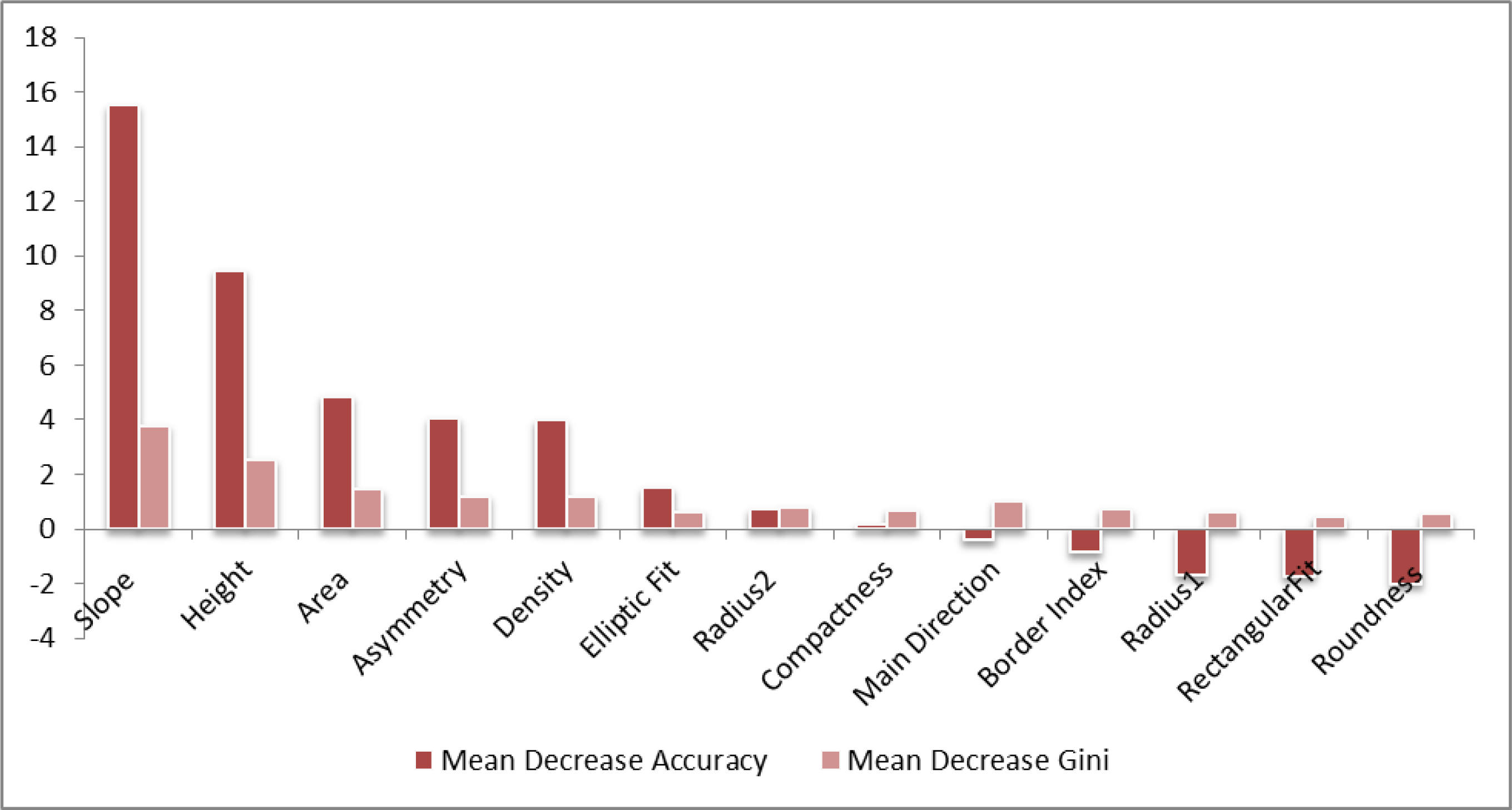
3.2.2. Feature Selection—Rejecting Irrelevant Features and Ranking the Feature Relevance
3.2.3. Ontology Formalization and Classification of the Building Types Using Fact++ Reasoner
3.3. Accuracy Assessment
4. Results and Discussion
4.1. Buildings Extraction from ALS Data
4.2. Feature Importance Results
4.3. Results of the Ontology-Based Classification of the Building Types
<EquivalentClasses><Class IRI="#Flat-Roof"/><DataSomeValuesFrom><DataProperty IRI="#Slope-Value"/><DatatypeRestriction><Datatype abbreviatedIRI="xsd:double"/><FacetRestriction facet="&xsd;maxExclusive"><Literal datatypeIRI="&xsd;double"< 25.0</Literal></FacetRestriction></DatatypeRestriction></DataSomeValuesFrom></EquivalentClasses>
4.4. Ontology Considerations
- (i)
- The logical consistency of the developed ontology can be automatically evaluated by the existing reasoner [19].
- (ii)
- Ontology represents a declarative knowledge model that can be subject to community scrutiny and can be easily extended or adapted to new application scenarios [20].
- (iii)
- Data provenance can be easily identified [43] as the class definitions are explicitly formulated into a machine and human understandable format. Therefore, the users can assess whether the generated thematic information fits the purpose of their application.
- (iv)
- The semantics of the evaluated categories is explicitly specified and therefore, it is possible to infer implicit knowledge by running a reasoner.
5. Summary
Acknowledgments
Author Contributions
Conflict of Interest
References
- Okada, S.; Takai, N. Classifications of Structural Types and Damage Patterns of Buildings for Earthquake Field Investigation. Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 30 January–4 February 2000.
- Heiple, S.; Sailor, D.J. Using building energy simulation and geospatial modeling techniques to determine high resolution building sector energy consumption profiles. Energy Build 2008, 40, 1426–1436. [Google Scholar]
- Cheng, L.; Gong, J.; Chen, X.; Han, P. Building boundary extraction from high resolution imagery and lidar data. Int. Archive. Photogramm. Remote Sens. Spatial Inf. Sci 2008, 37(Part B3), 693–698. [Google Scholar]
- Niemeyer, J.; Rottensteiner, F.; Soergel, U. Contextual classification of lidar data and building object detection in urban areas. ISPRS J. Photogramm. Remote Sens 2014, 87, 152–165. [Google Scholar]
- Rottensteiner, F.; Briese, C. A New Method for Building Extraction in Urban Areas from High-Resulution LIDAR Data. Proceedings of Commission IV Symposium “Geospatial Theory, Processing and Applications”, Ottawa, ON, Canada, 9–12 July 2001.
- Huang, H.; Brenner, C.; Sester, M. A generative statistical approach to automatic 3D building roof reconstruction from laser scanning data. ISPRS J. Photogramm. Remote Sens 2013, 79, 29–43. [Google Scholar]
- Awrangjeb, M.; Ravanbakhsh, M.; Fraser, C.S. Automatic detection of residential buildings using LIDAR data and multispectral imagery. ISPRS J. Photogramm. Remote Sens 2010, 65, 457–467. [Google Scholar]
- Hermosilla, T.; Ruiz, L.A.; Recio, J.A.; Estornell, J. Evaluation of automatic building detection approaches combining high resolution images and lidar data. Remote Sens 2011, 3, 1188–1210. [Google Scholar]
- Chen, Y.; Su, W.; Li, J.; Sun, Z. Hierarchical object oriented classification using very high resolution imagery and LIDAR data over urban areas. Advanc. Space Res 2009, 43, 1101–1110. [Google Scholar]
- Wurm, M.; Taubenböck, H.; Roth, A.; Dech, S. Urban Structuring Using Multisensoral Remote Sensing Data: By the Example of the German Cities Cologne and Dresden. Proceedings of Urban Remote Sensing Event, Shanghai, China, 20–22 May 2009.
- Barnsley, M.J.; Barr, S.L. Distinguishing urban land-use categories in fine spatial resolution land-cover data using a graph-based, structural pattern recognition system. Comput. Environ. Urban Syst 1997, 21, 209–225. [Google Scholar]
- Herold, M.; Scepan, J.; Müller, A.; Günther, S. Object-Oriented Mapping and Analysis of Urban Land Use/Cover Using IKONOS Data. Proceedings of 22nd EARSeL Symposium Geoinformation for European-Wide Integration, Prague, Czech Republic, 4–6, June 2002.
- De Almeida, J.P.; Morley, J.G.; Dowman, I.J. A graph-based algorithm to define urban topology from unstructured geospatial data. Int. J. Geogr. Inf. Sci 2013, 27, 1514–1529. [Google Scholar]
- Gonzalez-Aguilera, D.; Crespo-Matellan, E.; Hernandez-Lopez, D.; Rodriguez-Gonzalvez, P. Automated urban analysis based on LiDAR-derived building models. IEEE Trans. Geosci. Remote Sens 2013, 51, 1844–1851. [Google Scholar]
- Forestier, G.; Puissant, A.; Wemmert, C.; Gançarski, P. Knowledge-based region labeling for remote sensing image interpretation. Comput. Environ. Urban Syst 2012, 36, 470–480. [Google Scholar]
- Guan, H.; Li, J.; Chapman, M.; Deng, F.; Ji, Z.; Yang, X. Integration of orthoimagery and lidar data for object-based urban thematic mapping using random forests. Int. J. Remote Sens 2013, 34, 5166–5186. [Google Scholar]
- Smeulders, W.M.A.; Worring, M.; Santini, S.; Gupta, A.; Jain, R. Content-based image retrieval at the end of the early years. IEEE Trans. Pattern Anal. Mach. Intell 2000, 22, 1349–1380. [Google Scholar]
- Steiniger, S.; Lange, T.; Burghardt, D.; Weibel, R. An approach for the classification of urban building structures based on discriminant analysis techniques. Trans. GIS 2008, 12, 31–59. [Google Scholar]
- Arvor, D.; Durieux, L.; Andrés, S.; Laporte, M.-A. Advances in geographic object-based image analysis with ontologies: A review of main contributions and limitations from a remote sensing perspective. ISPRS J. Photogramm. Remote Sens 2013, 82, 125–137. [Google Scholar]
- Lüscher, P.; Weibel, R.; Burghardt, D. Integrating ontological modelling and Bayesian inference for pattern classification in topographic vector data. Comput. Environ. Urban Syst 2009, 33, 363–374. [Google Scholar] [Green Version]
- Gruber, T.R. A translation approach to portable ontology specifications. J. Knowl. Acquis. Knowl.-Based Syst 1993, 5, 199–220. [Google Scholar]
- Wang, Z.; Schenk, T. Extracting Buildings Information from LiDAR Data. Proceedings of ISPRS Commission III Symposium on Object Recognition and Scene Classification from Multispectral and Multisensor Pixels, Columbus, OH, USA, 6–10 July 1998; pp. 279–284.
- Alharthy, A.; Bethel, J. Heuristic Filtering and 3D Feature Extraction from LiDAR Data. Proceedings of Computer Society Conference on Computer Vision and Pattern Recognition, Kauai, HI, USA, 8–14 December 2001.
- Elaksher, A.F.; Bethel, J.S. Building Extraction Using LiDAR Data. Proceedings of ASPRS-ACSM Annual Conference and FIG XXII Congress, Wachington, DC, USA, 22–26 May 2002.
- Bimal, R.K.; Kumar, S.R. An algorithm for polygonal approximation of digitized curves. Pattern Recognit. Lett 1992, 13, 489–496. [Google Scholar]
- Hofmann, A.; Maas, H.G.; Streilein, A. Knowledge-based building detection based on laser scanner data and topographic map information. Int. Archives Photogramm. Remote Sens 2002, 34, 169–174. [Google Scholar]
- Cho, W.; Jwa, Y.-S.; Chang, H.-J.; Lee, S.-H. Pseudo-Grid Based Building Extraction Using Airborne LIDAR Data. Proceedings of ISPRS Congress Istanbul 2004, Istanbul, Turkey, 12–23 July 2004; pp. 3–6.
- Miliaresis, G.; Kokkas, N. Segmentation and object-based classification for the extraction of the building class from LIDAR DEMs. Comput. Geosci 2007, 33, 1076–1087. [Google Scholar]
- Evans, I. An integrated system for terrain analysis and slope mapping. Zeitschrift fuer Geomorphologie 1980, 36, 274–290. [Google Scholar]
- Jochem, A.; Hoefle, B.; Wichmann, V.; Rutzinger, M.; Zipf, A. Area-wide roof plane segmentation in airborne LiDAR point clouds. Comput. Environ. Urban Syst 2012, 36, 54–64. [Google Scholar]
- Wurm, M.; Taubenböck, H.; Schardt, M.; Esch, T.; Dech, S. Object-based image information fusion using multisensor earth observation data over urban areas. Int. J. Imag. Data Fus 2011, 2, 121–147. [Google Scholar]
- Agarwal, P. Ontological considerations in GIScience. Int. J. Geogr. Inf. Sci 2005, 19, 501–536. [Google Scholar]
- Lutz, M.; Klien, E. Ontology-based retrieval of geographic information. Int. J. Geogr. Inf. Sci 2006, 20, 233–260. [Google Scholar]
- Lüscher, P.; Weibel, R.; Burghardt, D. Alternative Options of Using Processing Knowledge to Populate Ontologies for the Recognition of Urban Concepts. Proceedings of 11th ICA Workshop on Generalisation and Multiple Representation, Montpellier, France, 20–21 June 2008.
- De Bertrand de Beuvron, F.; Marc-Zwecker, S.; Puissant, A.; Zanni-Merk, C. From expert knowledge to formal ontologies for semantic interpretation of the urban environment from satellite images. Int. J. Knowl.-Based Intell. Eng. Syst 2013, 17, 55–65. [Google Scholar]
- Thonnat, M. Knowledge-based techniques for image processing and image understanding. J. de Physique EDP Sci 2002, 4, 189–235. [Google Scholar]
- Hudelot, C.; Thonnat, M. A Cognitive Vision Platform for Automatic Recognition of Natural Complex Objects. Proceedings of the 15th IEEE International Conference on Tools with Artificial Intelligence ICTAI ’03, Sacramento, CA, USA, 3–5 November 2003.
- Liu, Y.; Zhang, D.; Lu, G.; Ma, W.-Y. A survey of content-based image retrieval with high-level semantics. Pattern Recognit 2007, 40, 262–282. [Google Scholar]
- Guarino, N. Formal Ontology and Information Systems. Proceedings of International Conference on Formal Ontology in Information Systems (FOIS1998), Trento, Italy, 6–8 June 1998; pp. 3–15.
- Masolo, C.; Borgo, S.; Gangemi, A.; Guarino, N.; Oltramari, A.; Oltramari, R.; Schneider, L.; Istc-cnr, L.P.; Horrocks, I. The WonderWeb Library of Foundational Ontologies and the DOLCE Ontology; WonderWeb Deliverable D17, Final Report; ISTC-CNR: Trento, Italy, 2002. [Google Scholar]
- Raskin, R. Guide to SWEET Ontologies; NASA/Jet Propulsion Lab: Pasadena, CA, USA. Available online: http://sweet.jpl.nasa.gov/guide.doc (accessed on 30 January 2014).
- Mark, D.M.; Smith, B.; Egenhofer, M.; Hirtle, S. Ontological Foundations for Geographic Information Science. In A Research Agenda for Geographic Information Science; McMaster, R.B., Usery, E.L., Eds.; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Janowicz, K. Observation-driven geo-ontology engineering. Trans. GIS 2012, 16, 351–374. [Google Scholar]
- Motik, B.; Patel-Schneider, P.F.; Parsia, B.; Bock, C.; Fokoue, A.; Haase, P.; Hoekstra, R.; Horrocks, I.; Ruttenberg, A.; Sattler, U. Owl 2 web ontology language: Structural specification and functional-style syntax. W3C Recomm 2009, 27, 1–133. [Google Scholar]
- Trimble. eCognition Developer; Version 8.7.2; Trimble: Munich, Germany, 2012. [Google Scholar]
- Rutzinger, M.; Rottensteiner, F.; Pfeifer, N. A comparison of evaluation techniques for building extraction from airborne laser scanning. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sen 2009, 2, 11–20. [Google Scholar]
- Zevenbergen, L.W.; Thorne, C.R. Quantitative analysis of land surface topography. Earth Surf. Process. Landf 1987, 12, 47–56. [Google Scholar]
- Höfle, B.; Pfeifer, N. Correction of laser scanning intensity data: Data and model-driven approaches. ISPRS J. Photogramm. Remote Sens 2007, 62, 415–433. [Google Scholar]
- Höfle, B.; Hollaus, M.; Hagenauer, J. Urban vegetation detection using radiometrically calibrated small-footprint full-waveform airborne LiDAR data. ISPRS J. Photogramm. Remote Sens 2012, 67, 134–147. [Google Scholar]
- Taubenböck, H.; Klotz, M.; Wurm, M.; Schmieder, J.; Wagner, B.; Wooster, M.; Esch, T.; Dech, S. Delineation of central business districts in Mega city regions using remotely sensed data. Remote Sens. Environ 2013, 136, 386–401. [Google Scholar]
- Walde, I.; Hese, S.; Schmullius, C. Graph Based Mapping of Urban Structure Types from High Resolution Satellite Image Objects. Proceedings of 4th International conference on Geographic Object-Based Image Analysis, Rio de Janeiro, Brazil, 7–9 May 2012.
- Walde, I.; Hese, S.; Berger, C.; Schmullius, C. Graph-based mapping of urban structure types from high-resolution satellite image objects: Case study of the German cities Rostock and Erfurt. IEEE Geosci. Remote Sens. Lett 2013, 10, 932–936. [Google Scholar]
- Hudelot, C.; Atif, J.; Bloch, I. Fuzzy spatial relation ontology for image interpretation. Fuzzy Set. Syst 2008, 159, 1929–1951. [Google Scholar]
- Kursa, M.B.; Rudnicki, W.R. Feature selection with the Boruta Package. J. Stat. Softw 2010, 36, 1–13. [Google Scholar]
- Breiman, L. Random forest. Mach. Learn 2001, 45, 5–32. [Google Scholar]
- Stumpf, A.; Kerle, N. Object-oriented mapping of landslides using Random Forests. Remote Sens. Environ 2011, 115, 2564–2577. [Google Scholar]
- Corcoran, J.; Knight, J.; Gallant, A. Influence of multi-source and multi-temporal remotely sensed and ancillary data on the accuracy of random forest classification of wetlands in Northern Minnesota. Remote Sens 2013, 5, 3212–3238. [Google Scholar]
- Immitzer, M.; Atzberger, C.; Koukal, T. Tree species classification with random forest using very high spatial resolution 8-Band WorldView-2 Satellite data. Remote Sens 2012, 4, 2661–2693. [Google Scholar]
- Touw, W.G.; Bayjanov, J.R.; Overmars, L.; Backus, L.; Boekhorst, J.; Wels, M.; van Hijum, S.A. Data mining in the life sciences with random forest: A walk in the park or lost in the jungle? Brief. Bioinforma 2013, 14, 315–326. [Google Scholar]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens 2012, 67, 93–104. [Google Scholar]
- Stadtsplanungsamt, Biberach der der Riss. Stadt Biberach. Available online: http://31.25.153.41/mapguide/mapviewerajax/?WEBLAYOUT=Library://web/Stadtplan.WebLayout&LOCALE=de&USERNAME=Anonymous&Password= (accessed on 30 January 2014).
- Team, D.C. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2013. [Google Scholar]
- Tsarkov, D.; Horrocks, I. FaCT++ description logic reasoner: System description. Automated Reason 2006, 4130, 292–297. [Google Scholar]
- Van Rijsbergen, C. Information Retrieval; Butterworth-Heinemann: London, UK, 1979. [Google Scholar]
- Lutz, M.; Kolas, D. Rule-based discovery in spatial data infrastructure. Trans. GIS 2007, 11, 317–336. [Google Scholar]
- Belgiu, M.; Drǎguţ, L.; Strobl, J. Quantitative evaluation of variations in rule-based classifications of land cover in urban neighbourhoods using WorldView-2 imagery. ISPRS J. Photogramm. Remote Sens 2014, 87, 205–215. [Google Scholar]
- Kohli, D.; Sliuzas, R.; Kerle, N.; Stein, A. An ontology of slums for image-based classification. Comput. Environ. Urban Syst 2012, 36, 154–163. [Google Scholar]
- Tripathi, A.; Babaie, H.A. Developing a modular hydrogeology ontology by extending the SWEET upper-level ontologies. Comput. Geosci 2008, 34, 1022–1033. [Google Scholar]
- Li, Y.; Yu, Y.; Heflin, J. Evaluating Reasoners under Realistic Semantic Web Conditions. Proceedings of the 2012 OWL Reasoner Evaluation Workshop, Ulm, Germany, 22 July 2012.
- Bock, J.; Haase, P.; Ji, Q.; Volz, R. Benchmarking OWL Reasoners. Proceedings of the ARea2008 Workshop, Tenerife, Spain, 2 June 2008.
- Blaschke, T. Object based image analysis for remote sensing. ISPRS J. Photogramm. Remote Sens 2010, 62, 2–16. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Variables | Feature Value Range | Explanations Provided by [45] |
|---|---|---|---|
| Extent | Area | [0, scene size] | The area of the identified object |
| Shape Features | Radius 1 | [0, ∞] | Similarity of an object to an ellipse (totally enclosing the image object) |
| Radius 2 | [0, ∞] | Similarity of an object to an ellipse (totally enclosed by the image object) | |
| Rectangular Fit | [0, 1] | Objects squareness | |
| Elliptic Fit | [0, 1] | Explains how well an object fits an ellipse | |
| Asymmetry | [0, 1] | Relative length of an object compared to a regular polygon | |
| Border Index * | [1, ∞] | Describes how jagged an object is; the more jagged, the higher its border index | |
| Main Direction | [0, 180] | Defined as the direction of the eigenvector belonging to the larger of the two eigenvalues | |
| Shape Index | [1, ∞] | Describes the smoothness of buildings boundaries the smoother the border of an image object, the lower its shape index | |
| Compactness | [0, ∞] | The more compact, the smaller its border appears. Similar to Border Index, but it is based on area | |
| Roundness | [0, ∞] | How similar an image is to an ellipse by the difference of enclosing and the enclosed ellipse | |
| Density | [0, depending on the shape of image object] | The most dense shape is a square | |
| Height | Mean Height | 2–25 m | Calculated from nDSM |
| Slope | Slope | [0, 80°] | Calculated from nDSM |
| Buildings Class | Natural Language Description |
|---|---|
| Residential/Small Buildings | High building density, small, rectangular building form (simple form) |
| Apartments/Block Buildings | Rectangular or elongated form, higher than industrial and factory buildings |
| Industrial and Factory Buildings | Low density building areas, larger dimensions, complex and compact building form, diverse main directions |
| Residential/Small Buildings | Relevant | Not Relevant |
|---|---|---|
| Retrieved | 551 | 16 |
| Not Retrieved | 9 | 109 |
| Recall (%) | 98.3 | |
| Precision (%) | 97.1 | |
| F-Measure (%) | 97.7 | |
| Total | 687 |
| Apartment Buildings | Relevant | Not Relevant |
|---|---|---|
| Retrieved | 37 | 13 |
| Not Retrieved | 36 | 711 |
| Recall (%) | 50.6 | |
| Precision (%) | 74.0 | |
| F-Measure (%) | 60.1 | |
| Total | 73 |
| Industrial and Factory Buildings | Relevant | Not Relevant |
|---|---|---|
| Retrieved | 22 | 47 |
| Not Retrieved | 5 | 723 |
| Recall (%) | 81.4 | |
| Precision (%) | 37.2 | |
| F-Measure (%) | 51.1 | |
| Total | 27 |
© 2014 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Belgiu, M.; Tomljenovic, I.; Lampoltshammer, T.J.; Blaschke, T.; Höfle, B. Ontology-Based Classification of Building Types Detected from Airborne Laser Scanning Data. Remote Sens. 2014, 6, 1347-1366. https://doi.org/10.3390/rs6021347
Belgiu M, Tomljenovic I, Lampoltshammer TJ, Blaschke T, Höfle B. Ontology-Based Classification of Building Types Detected from Airborne Laser Scanning Data. Remote Sensing. 2014; 6(2):1347-1366. https://doi.org/10.3390/rs6021347
Chicago/Turabian StyleBelgiu, Mariana, Ivan Tomljenovic, Thomas J. Lampoltshammer, Thomas Blaschke, and Bernhard Höfle. 2014. "Ontology-Based Classification of Building Types Detected from Airborne Laser Scanning Data" Remote Sensing 6, no. 2: 1347-1366. https://doi.org/10.3390/rs6021347
APA StyleBelgiu, M., Tomljenovic, I., Lampoltshammer, T. J., Blaschke, T., & Höfle, B. (2014). Ontology-Based Classification of Building Types Detected from Airborne Laser Scanning Data. Remote Sensing, 6(2), 1347-1366. https://doi.org/10.3390/rs6021347