Optimizing SIFT for Matching of Short Wave Infrared and Visible Wavelength Images

Abstract
:1. Introduction
2. Background
3. Related Work
4. Image Dataset Characteristics
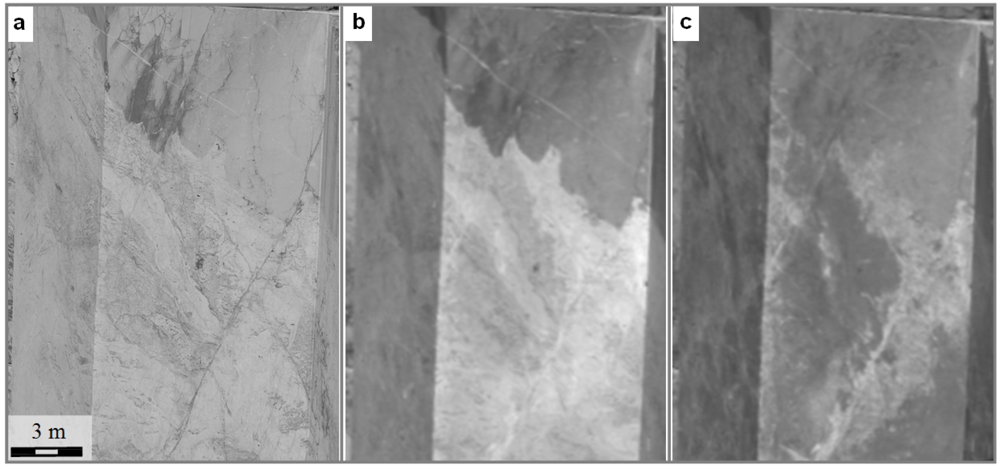
4.1. SWIR Hyperspectral Imagery
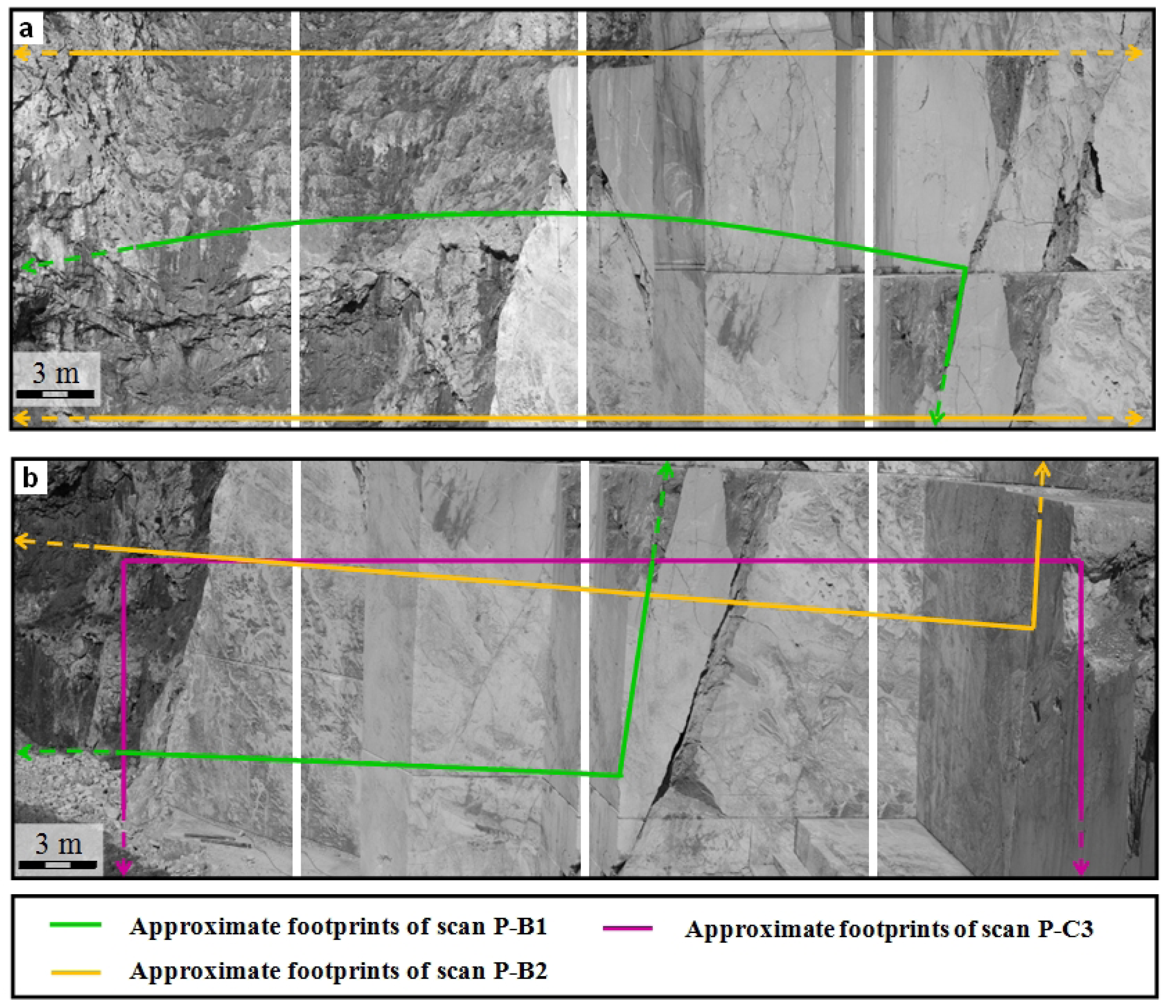
4.2. VIS Imagery
5. Optimization of Selected SIFT Parameters
5.1. Experiment Description
5.2. Uncertainty
5.3. Analysis of Results
6. Results and Discussion
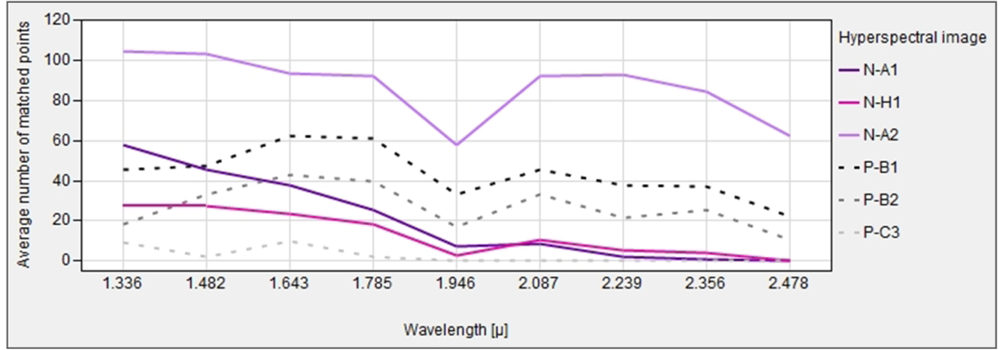
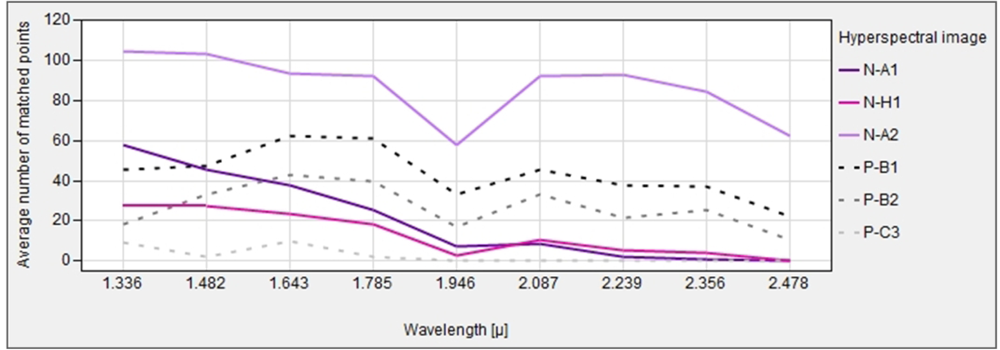
6.1. Pre-Analysis
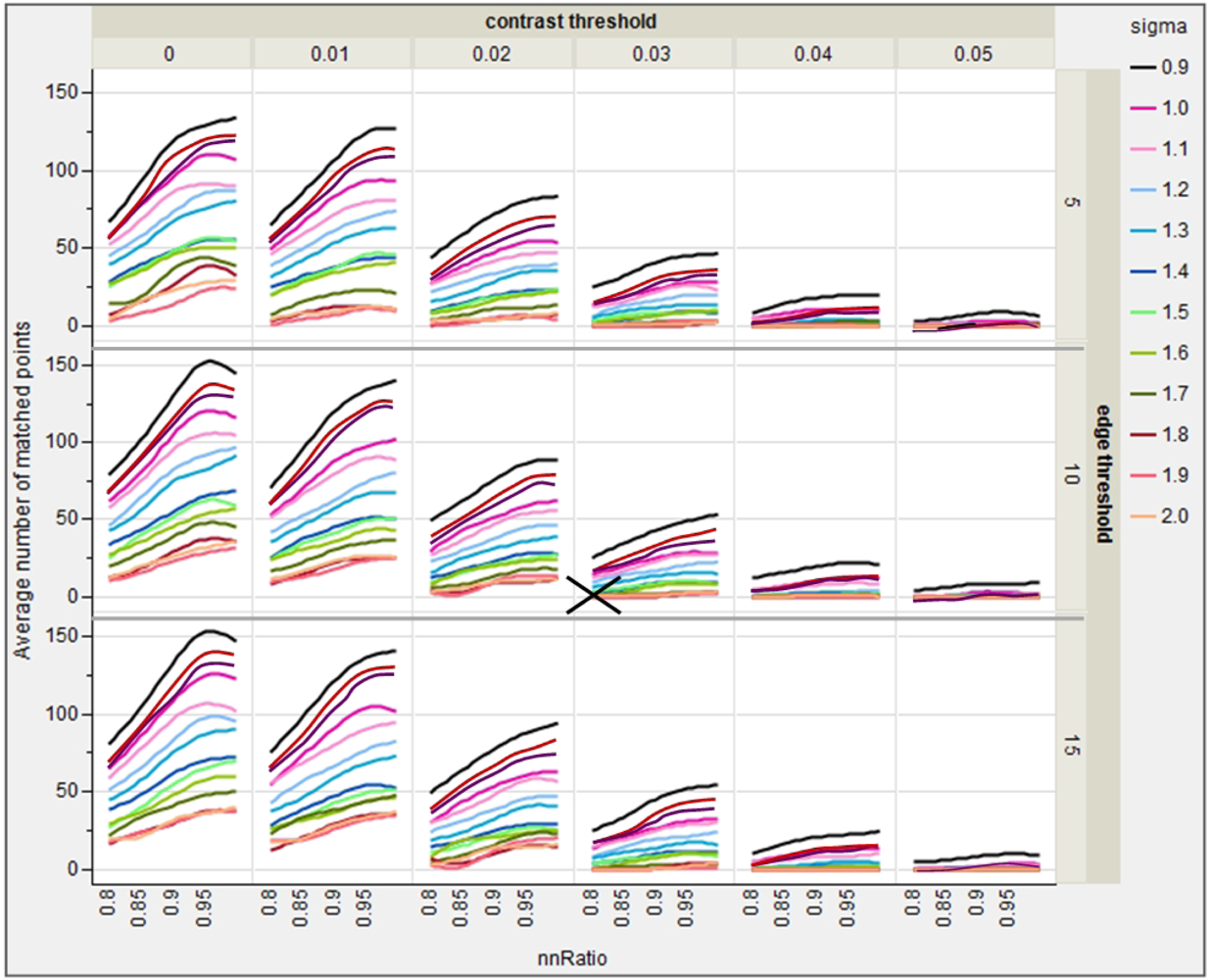
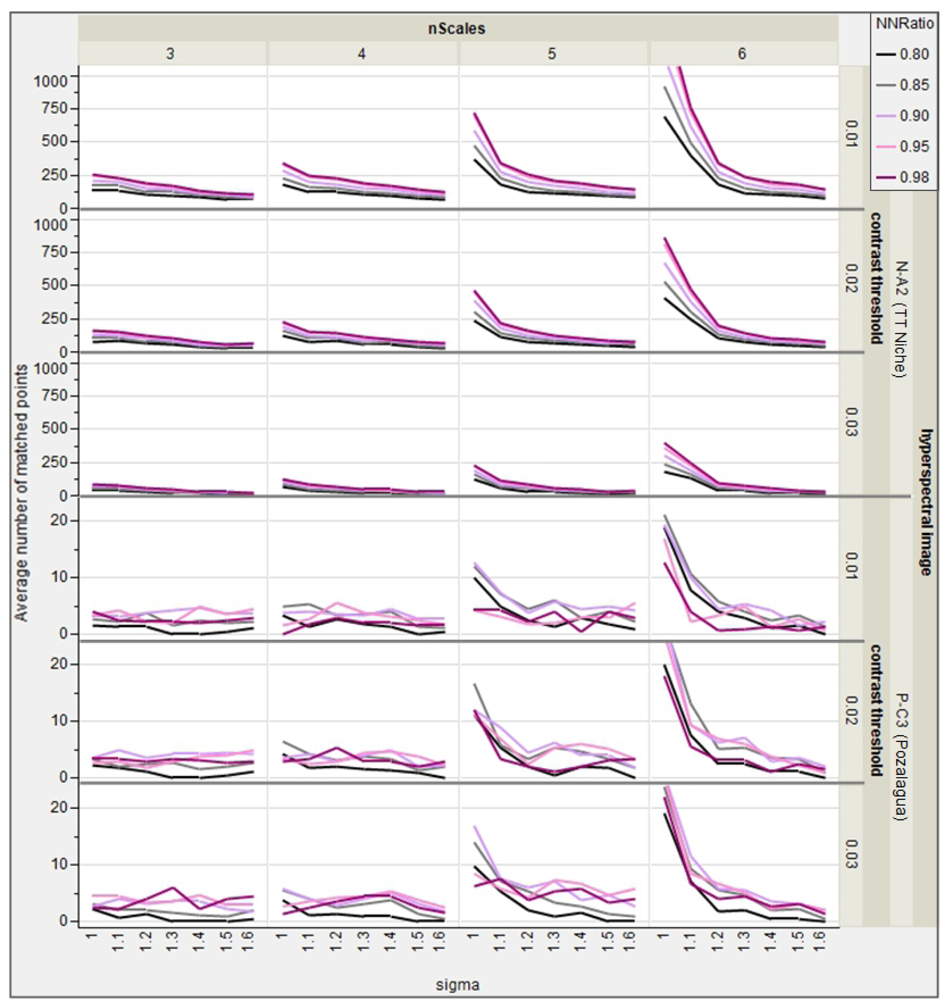
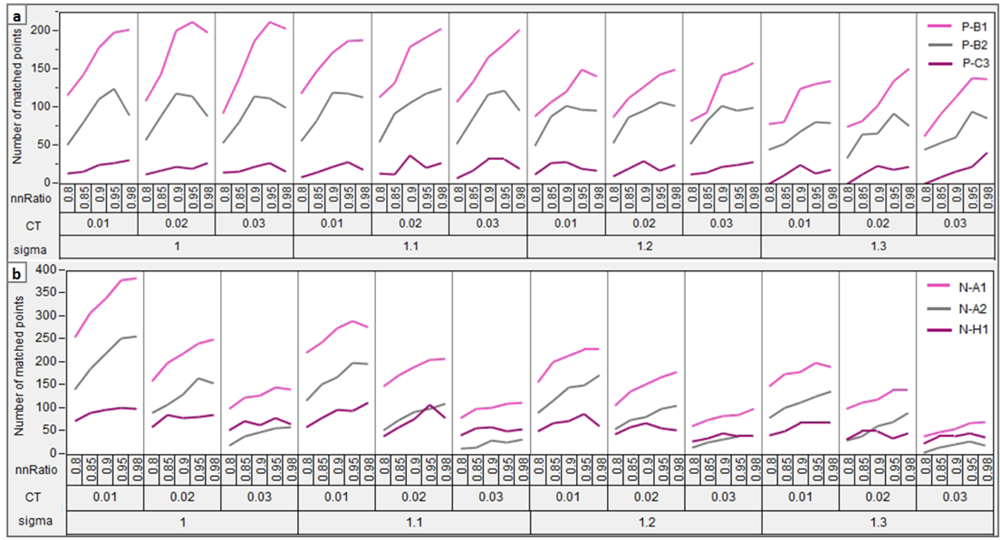
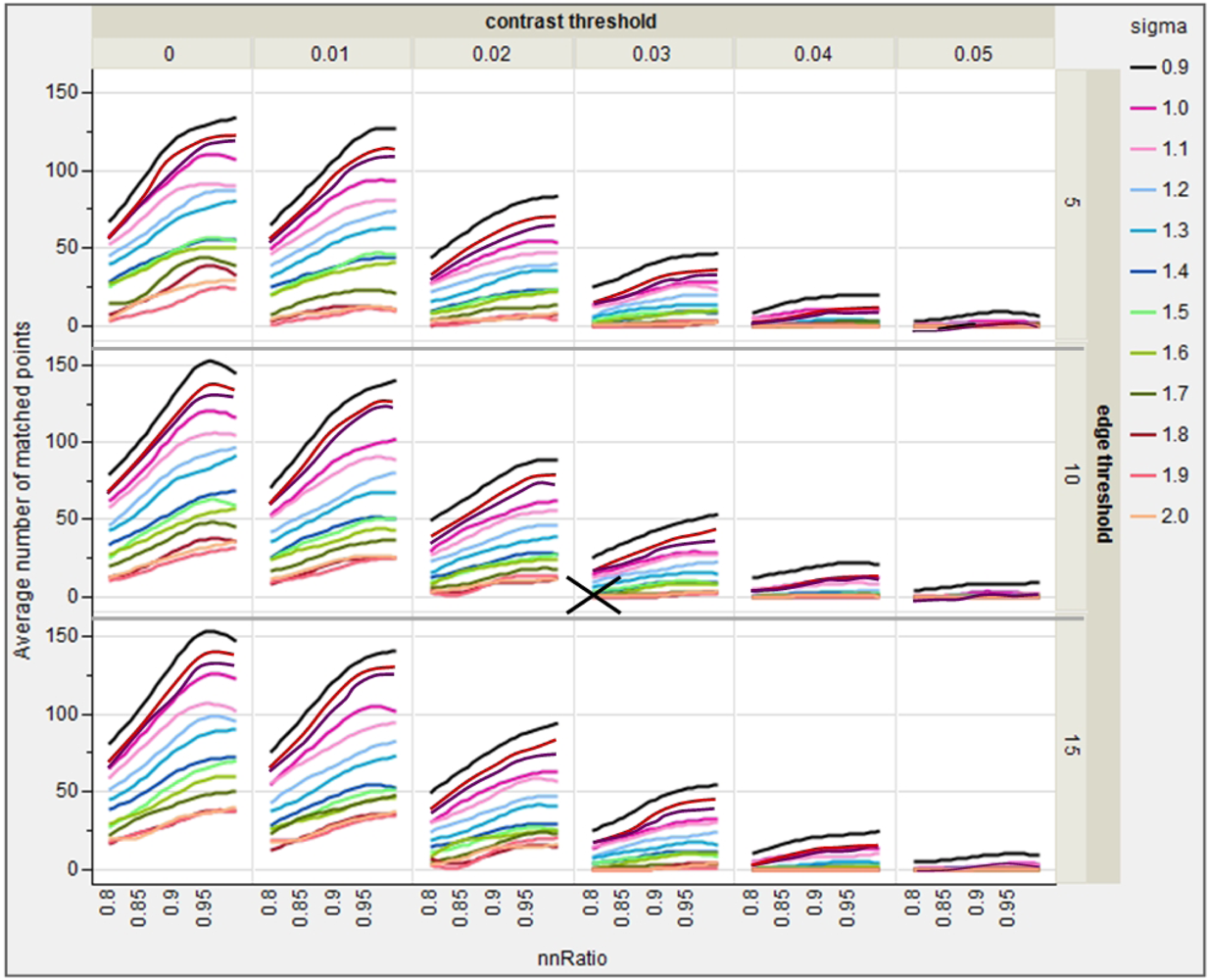
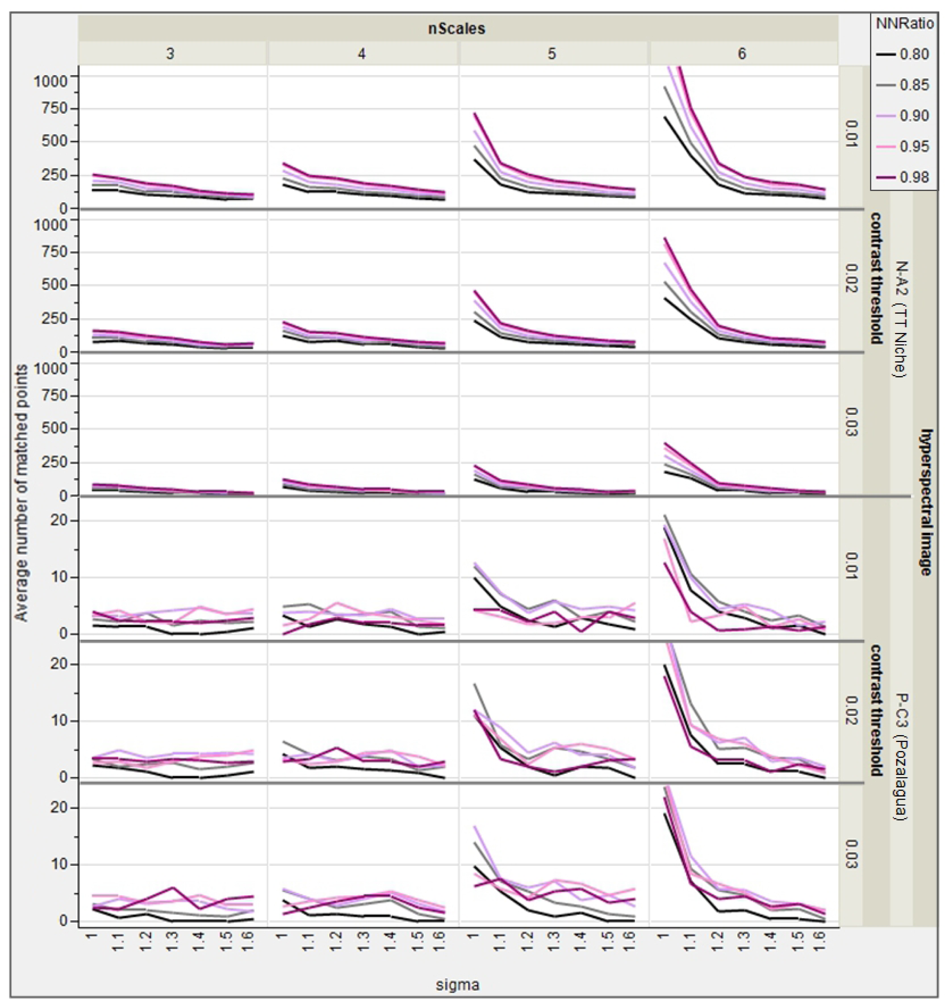
6.2. Parameter Optimization Analysis
7. Conclusions
Acknowledgments
- Conflict of InterestThe authors declare no conflict of interest.
References
- Tuytelaars, T.; Mikolajczyk, K. Local invariant feature detectors: A survey. Found. Trends Comput. Graph. Vis. 2007, 3, 177–280. [Google Scholar]
- Harris, C.; Stephens, M. A Combined Corner and Edge Detector. Proceedings of 4th Alvey Vision Conference, Alvey, UK, 31 August–2 September 1988; pp. 147–151.
- Meierhold, N.; Spehr, M.; Schilling, A.; Gumhold, S.; Maas, H.-G. Automatic feature matching between digital images and 2D representations of a 3D laser scanner point cloud. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2010, 38, 446–451. [Google Scholar]
- Rosten, E.; Drummond, T. Machine Learning for High-speed Corner Detection. Proceedings of European Conference on Computer Vision, ECCV 2006, Graz, Austria, 7–13 May 2006; pp. 1–14.
- Calonder, M.; Lepetit, V.; Strecha, C.; Fua, P. BRIEF: Binary robust independent elementary features. Lect. Note. Comput. Sci. 2010, 6314, 778–792. [Google Scholar]
- Rublee, E.; Rabaud, V.; Konolige, K.; Bradski, G. ORB: An Efficient Alternative to SIFT or SURF. Proceedings of IEEE International Conference on Computer Vision, ICCV 2011, Barcelona, Spain, 8–11 November 2011; pp. 2564–2571.
- Matas, J.; Chum, O.; Urban, M.; Pajdla, T. Robust wide-baseline stereo from maximally stable extremal regions. Image Vision Comput. 2004, 22, 761–767. [Google Scholar]
- Morel, J.-M.; Yu, G. ASIFT: A new framework for fully affine invariant image comparison. J. Imaging Sci. 2009, 2, 438–469. [Google Scholar]
- Alahi, A.; Ortiz, R.; Vandergheynst, P. FREAK: Fast Retina Keypoint. In Proceedings of 2012 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2012, Providence, RI, USA, 16–21 June 2012; pp. 510–517.
- Lowe, D. Object Recognition from Local Scale-Invariant Features. Proceedings of the Seventh IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; 2, pp. 1150–1157.
- Wessel, B.; Huber, M.; Roth, A. Registration of near real-time SAR images by image-to-image matching. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 179–184. [Google Scholar]
- Khan, N.Y.; McCane, B.; Wyvill, G. SIFT and SURF Performance Evaluation against Various Image Deformations on Benchmark Dataset. Proceedings of 2011 International Conference on Digital Image Computing: Techniques and Applications, Noosa Australia, 6–8 December 2011; pp. 501–506.
- Lingua, A.; Marenchino, D.; Nex, F. Performance Analysis of the SIFT Operator for Automatic Feature Extraction and Matching in Photogrammetric Applications. Proceedings of the 10th CESCG Conference, Budmerice Castle, Slovakia, 20–22 April 2009; 9, pp. 3745–3766.
- Nieto, J.I.; Monteiro, S.T. 3D Geological Modelling Using Laser and Hyperspectral Data. Proceedings of the IGARSS 2010 Symposium, Honolulu, HI, USA, 25–30 July 2010; pp. 4568–4571.
- Sima, A.A.; Buckley, S.J.; Kurz, T.H.; Schneider, D. Semi-automatic integration of panoramic hyperspectral imagery with photorealistic lidar models. Photogramm. Fernerkund. Geoinf. 2012, 2012, 443–454. [Google Scholar]
- De Matías, J.; de Sanjosé, J.J.; López-Nicolás, G.; Sagüés, C.; Guerrero, J.J. Photogrammetric methodology for the production of geomorphologic maps: Application to the Veleta Rock Glacier (Sierra Nevada, Granada, Spain). Remote Sens. 2009, 1, 829–841. [Google Scholar]
- Delponte, E.; Isgrò, F.; Odone, F.; Verri, A. SVD-matching using SIFT features. Graph. Model. 2006, 68, 415–431. [Google Scholar]
- Yun, S.U.; Min, D.; Sohn, K. 3D Scene Reconstruction System with Hand-held Stereo Cameras. Proceedings of 3DTV Conference, Kos Island, Greece, 3–7 May 2007.
- Ostiak, P. Implementation of HDR Panorama Stitching Algorithm. Proceedings of the 10th CESCG Conference, Castá-Papiernicka, Slovakia, 23–26 April 2006.
- Ogawa, Y.; Shimada, N.; Shirai, Y. Environmental Mapping for Mobile Robot by Tracking SIFT Feature Points Using Trinocular Vision. Proceedings of the SICE Annual Conference, Takamatsu, Japan, 17–20 September 2007; pp. 1996–2001.
- Lowe, D. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar]
- Yi, Z.; Cao, Z.; Xiao, Y. Multi-spectral remote image registration based on SIFT. Electron. Lett. 2008, 44, 4–5. [Google Scholar]
- Aguilera, C.; Barrera, F.; Lumbreras, F.; Sappa, A.D.; Toledo, R. Multispectral image feature points. Sensors 2012, 12, 12661–12672. [Google Scholar]
- Buckley, S.J.; Kurz, T.H.; Howell, J.A.; Schneider, D. Terrestrial lidar and hyperspectral data fusion products for geological outcrop analysis. Comput. Geosci. 2013, 54, 249–258. [Google Scholar]
- Goetz, A.F.H.; Vane, G.; Solomon, J.E.; Rock, B.N. Imaging spectrometry for earth remote sensing. Science 1985, 228, 1147–1153. [Google Scholar]
- Kruse, F.A.; Bidell, R.L.; Taranik, J.V.; Peppin, W.A.; Weatherbee, O.; Calvin, W.M. Mapping alteration minerals at prospect, outcrop, and drill core scales using imaging spectrometry. Int. J. Remote Sens. 2012, 33, 1780–1898. [Google Scholar]
- Kurz, T.H.; Dewit, J.; Buckley, S.J.; Thurmond, J.B.; Hunt, D.W.; Swennen, R. Hyperspectral image analysis of different carbonate lithologies (limestone, karst and hydrothermal dolomites): The Pozalagua Quarry case study (Cantabria, North-west Spain). Sedimentology 2012, 59, 623–645. [Google Scholar]
- Clark, R.N.; King, T.V.V; Klejwa, M.; Swayze, G.A. High spectral resolution reflectance spectroscopy of minerals. J. Geophys. Res. 1990, 95, 12653–12680. [Google Scholar]
- Clark, R.N.; Roush, T.L. Reflectance spectroscopy: Quantitative analysis techniques for remote sensing applications. J. Geophys. Res. 1984, 89, 6329. [Google Scholar]
- Kurz, T.H.; Buckley, S.J.; Howell, J.A.; Schneider, D. Integration of panoramic hyperspectral imaging with terrestrial lidar data. Photogramm. Rec. 2011, 26, 212–228. [Google Scholar]
- May, M.; Turner, M.J. Scale Invariant Feature Transform: A Graphical Parameter Analysis. Proceedings of the BMVC 2010 UK. Postgraduate Workshop, Aberystwyth, UK, 31 August–3 September 2010; pp. 1–11.
- Park, U.; Pankanti, S.; Jain, A.K. Fingerprint Verification Using SIFT Features. Proceedings of SPIE Defense and Security Symposium 2008, Orlando, FL, USA, 16–20 March 2008; pp. 1–9.
- Weinmann, M.; Jutzi, B. Fully automatic image-based registration of unorganized TLS data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2011, 38, 1–6. [Google Scholar]
- May, M. Data Analytics and Methods for Improved Feature Selection and Matching, 2012; p. 232.
- Maestas, D.R.; Lumia, R.; Starr, G.; Wood, J. Scale Invariant Feature Transform (SIFT) parametric optimization using taguchi design of experiments. Design 2010, 6424, 630–641. [Google Scholar]
- Alonso-Fernandez, F.; Tome-Gonzalez, P.; Ruiz-Albacete, V.; Ortega-Garcia, J. Iris Recognition based on SIFT Features. Proceedings of 2009 First IEEE International Conference on Biometrics, Identity and Security (BIdS), Tampa, FL, USA, 22–23 September 2009; pp. 1–8.
- Schneider, D.; Maas, H.-G. A geometric model for linear-array-based terrestrial panoramic cameras. Photogramm. Rec. 2006, 21, 198–210. [Google Scholar]
- Durda, F. NTSC Primer. Available online: http://nemesis.lonestar.org/reference/internet/web/color/ntsc_primer (accessed on 22 October 2012).
- Fischer, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Graph. Image Process 1981, 24, 381–395. [Google Scholar]
- Montgomery, D.C. Design and Analysis of Experiments, 6th ed.; Wiley: New York, NY, USA, 2004; p. 660. [Google Scholar]
- Howell, D.C. Statistical Methods for Psychology, 4th ed.; Wadsworth: Belmont, CA, USA, 1997; p. 332. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | HySpex SWIR-320m | Nikon D200 | ||||
|---|---|---|---|---|---|---|
| Image | Number of Columns | Object Sampling Resolution (m) | Number of Bands Used | Covering Photos | Object Sampling Resolution (m) | |
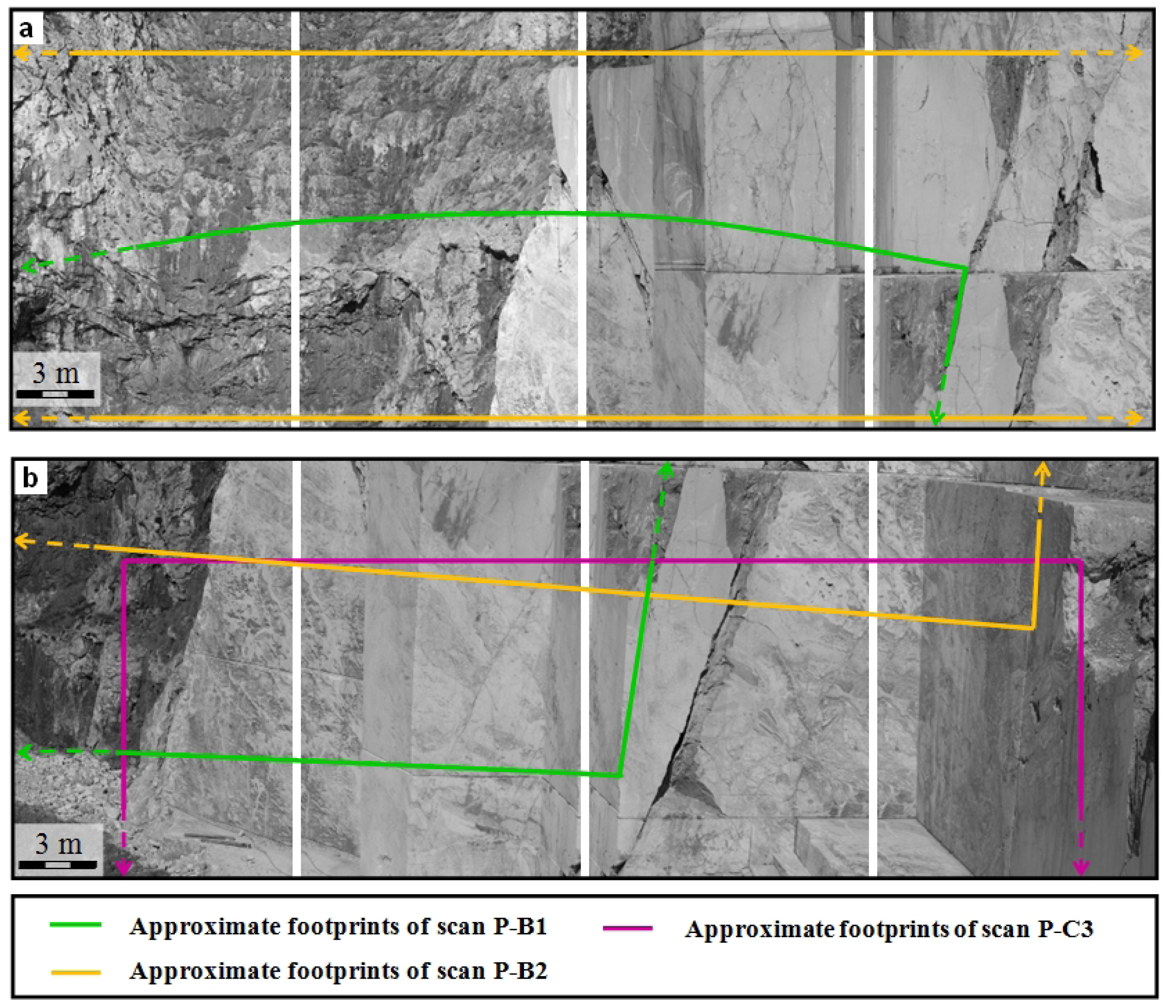
| Pozalagua quarry, Cantabria, Spain | P-B1 | 1,200 | 0.075 | 205 | 5 | 0.007 |
| P-B2 | 1,500 | 0.068 | 211 | 6 | 0.007 | |
| P-C3 | 700 | 0.049 | 204 | 3 | 0.005 | |
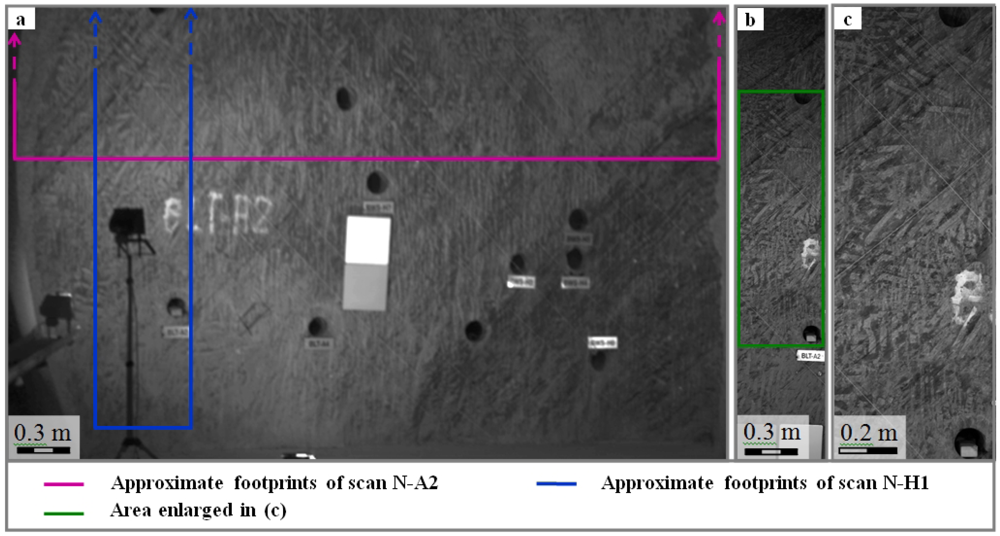
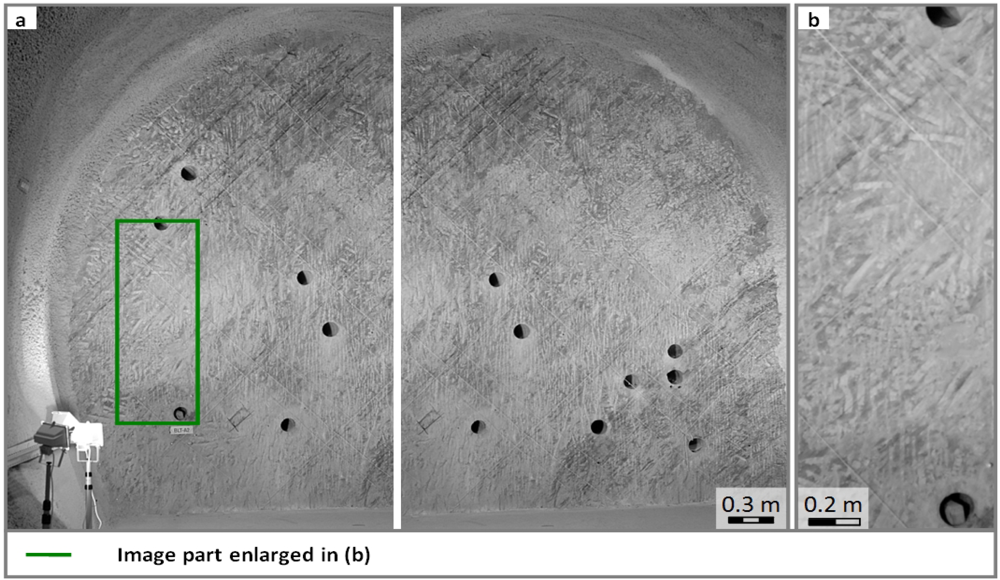
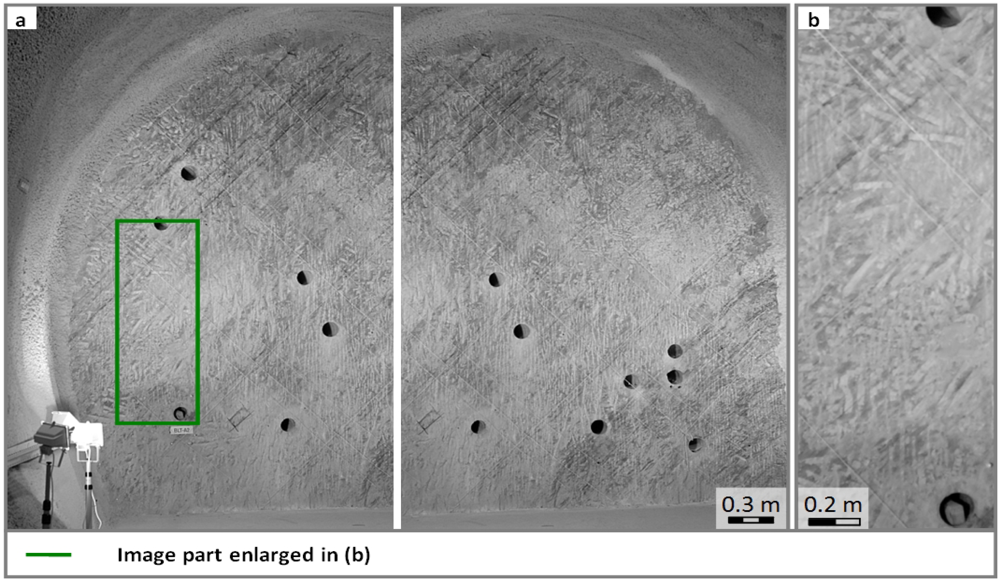
| TT Niche tunnel, Mont Terri, Switzerland | N-A1 | 510 | 0.010 | 241 | 2 | 0.002 |
| N-A2 | 510 | 0.010 | 241 | 2 | 0.002 | |
| N-H1 | 1,600 | 0.004 | 241 | 1 | 0.002 | |
| Parameter | Default Value [21] | Range in Pre-Analysis | Interval in Pre-Analysis | Range in Analysis | Interval in Analysis |
|---|---|---|---|---|---|
| Scales in octave (nScales) | 3 | 3–6 | 1 | 3–6 | 1 |
| Initial Gaussian blur (sigma) | 1.6 | 0.7–2.0 | 0.1 | 1.0–1.3 | 0.1 |
| Contrast threshold (CT) | 0.03 | 0.0–0.05 | 0.01 | 0.01–0.03 | 0.01 |
| Edge threshold | 10 | 5–15 | 5 | 10 | - |
| Nearest neighbor ratio (nnRatio) | 0.8 | 0.8–0.98 | 0.05 | 0.8–0.98 | 0.05 |
| Band number | 1 | 31 | 62 | 93 | 124 | 155 | 186 | 210 | 235 |
| Wavelength (μm) | 1.336 | 1.482 | 1.643 | 1.785 | 1.936 | 2.087 | 2.239 | 2.356 | 2.478 |
| Site | Image | nScales | Sigma | Contrast Threshold | Edge Threshold | nnRatio | Maximal Total Number of Matched Points | |
|---|---|---|---|---|---|---|---|---|
| Optimized Parameters | Default Parameters | |||||||
| Pozalagua | P-B1 | 3 | 1.0–1.1 | 0.01–0.03 | 10 | 0.9–0.95 | 214 | 31 |
| P-B2 | 3 | 1.0–1.1 | 0.01–0.03 | 10 | 0.9–0.95 | 132 | 30 | |
| P-C3 | 6 | 1.1 | 0.03 | 10 | 0.9–0.95 | 70 | 5 | |
| TT Niche | N-A1 | 3 | 1.0 | 0.01 | 10 | 0.95–0.98 | 258 | 12 |
| N-A2 | 3 | 1.0 | 0.01 | 10 | 0.95–0.98 | 383 | 17 | |
| N-H1 | 3 | 1.0 | 0.01 | 10 | 0.95–0.98 | 101 | 14 | |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Sima, A.A.; Buckley, S.J. Optimizing SIFT for Matching of Short Wave Infrared and Visible Wavelength Images. Remote Sens. 2013, 5, 2037-2056. https://doi.org/10.3390/rs5052037
Sima AA, Buckley SJ. Optimizing SIFT for Matching of Short Wave Infrared and Visible Wavelength Images. Remote Sensing. 2013; 5(5):2037-2056. https://doi.org/10.3390/rs5052037
Chicago/Turabian StyleSima, Aleksandra A., and Simon J. Buckley. 2013. "Optimizing SIFT for Matching of Short Wave Infrared and Visible Wavelength Images" Remote Sensing 5, no. 5: 2037-2056. https://doi.org/10.3390/rs5052037
APA StyleSima, A. A., & Buckley, S. J. (2013). Optimizing SIFT for Matching of Short Wave Infrared and Visible Wavelength Images. Remote Sensing, 5(5), 2037-2056. https://doi.org/10.3390/rs5052037