Videographic Analysis of Eriophorum Vaginatum Spatial Coverage in an Ombotrophic Bog

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Data and Methodology
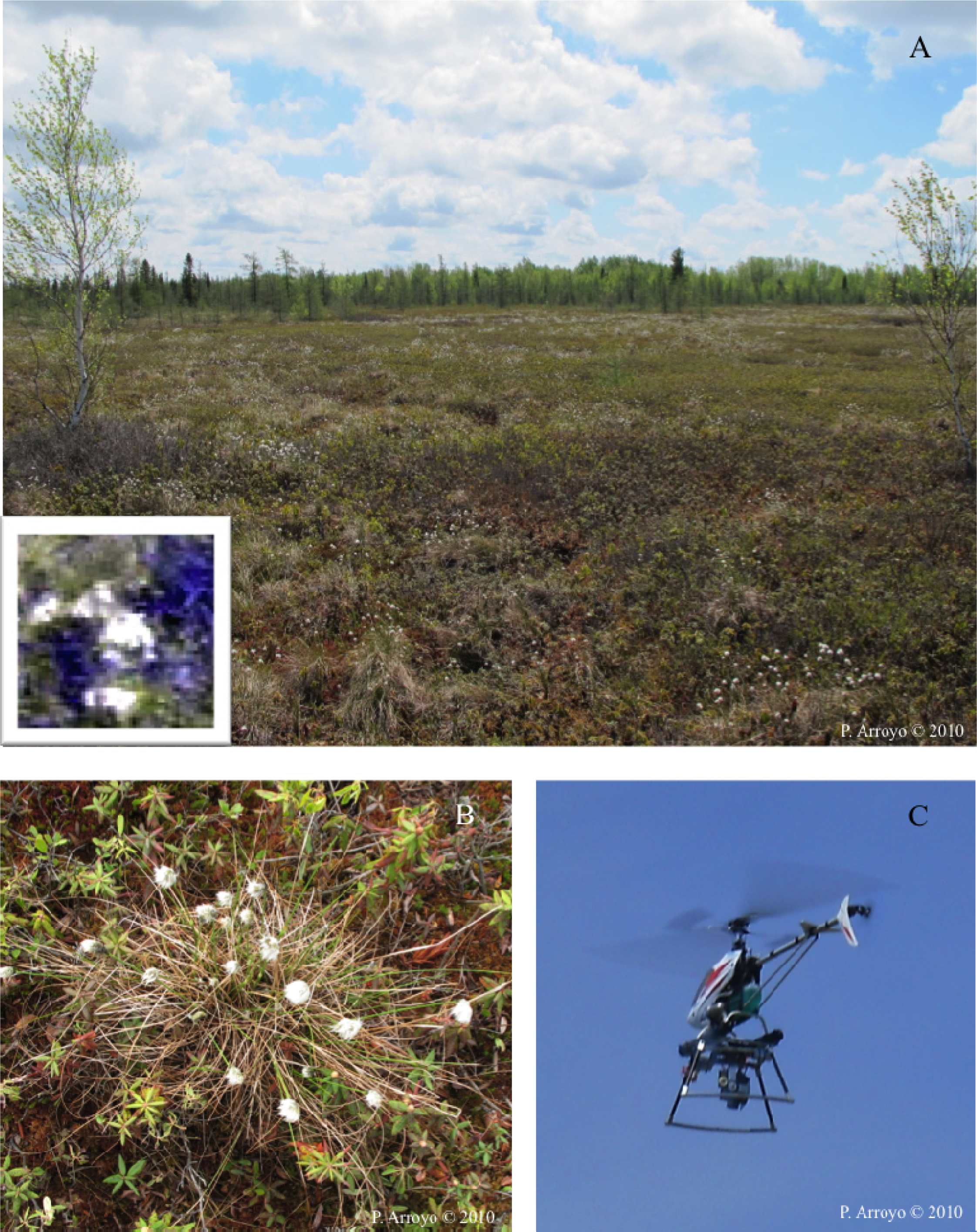
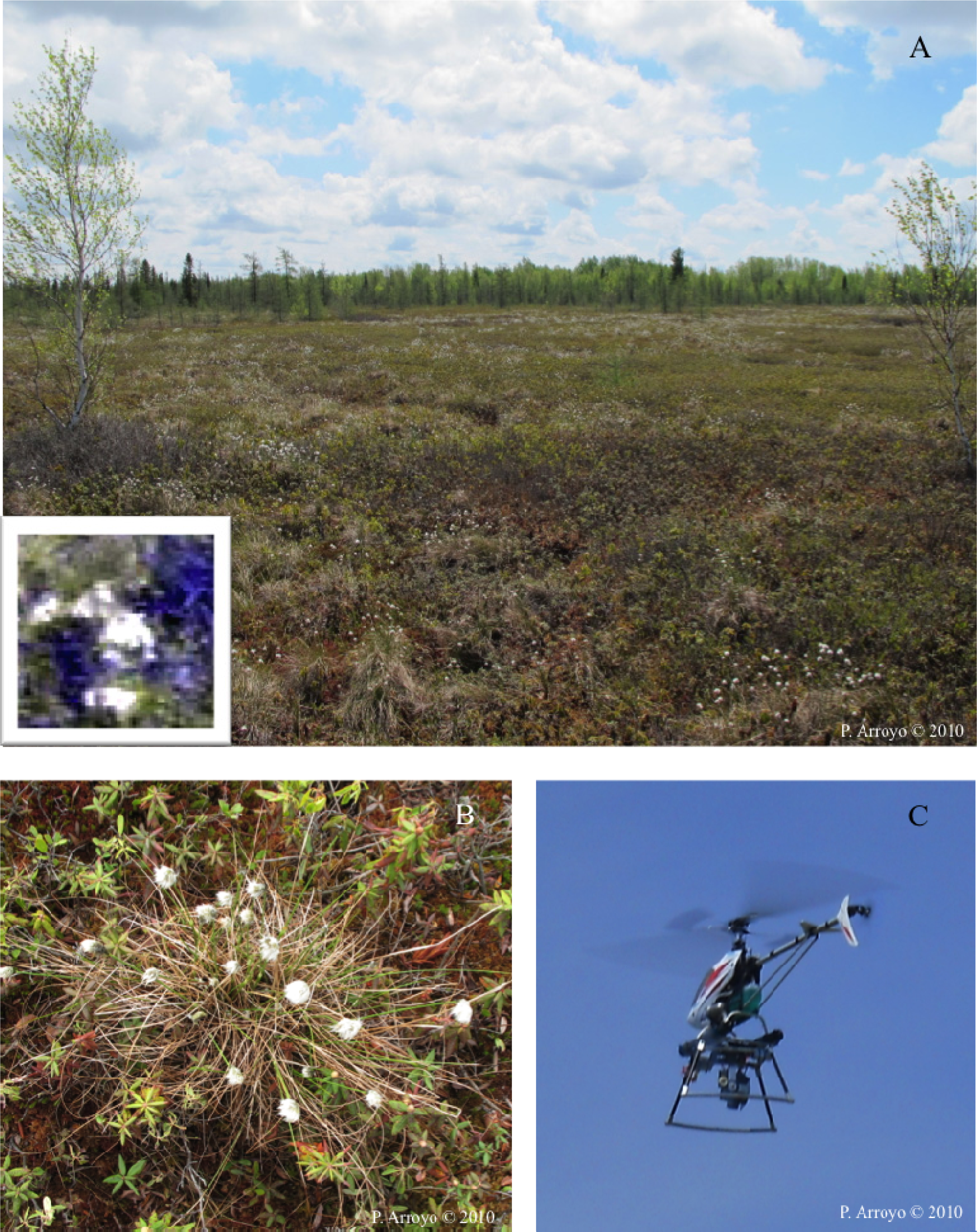
2.1. Study Area
2.2. Data Collection and Preparation
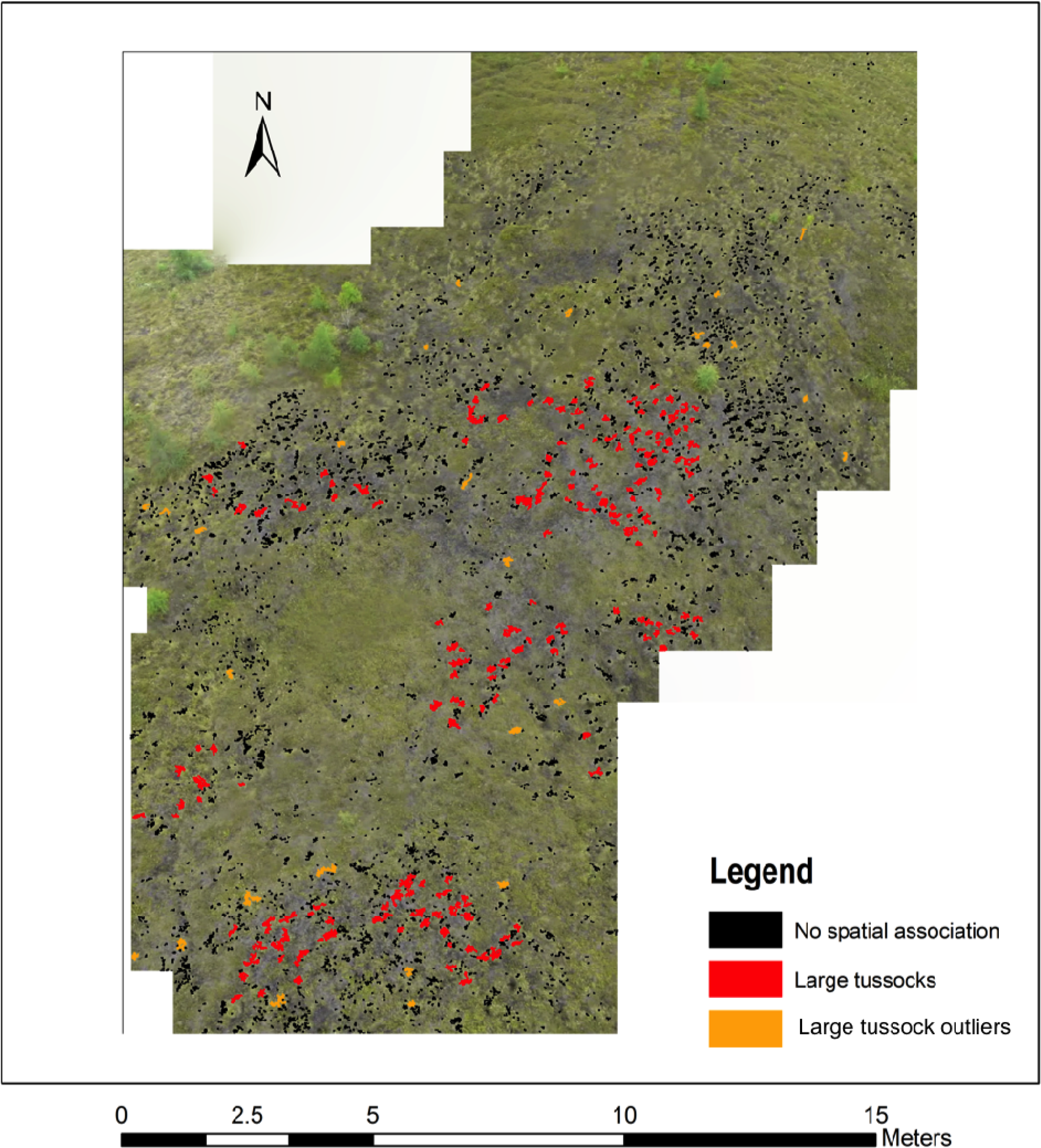
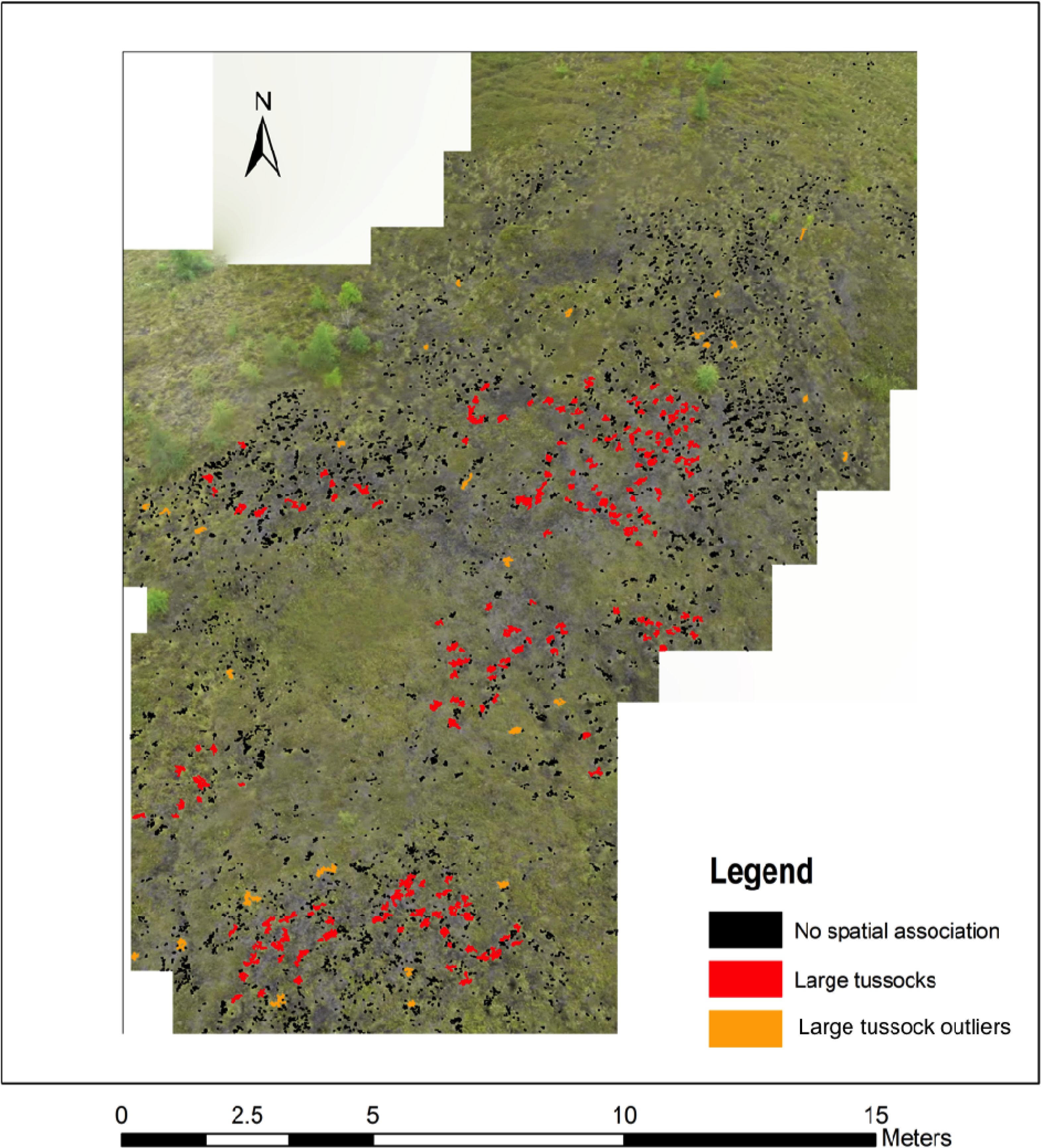
2.3. Classification
2.4. Field Data Collection
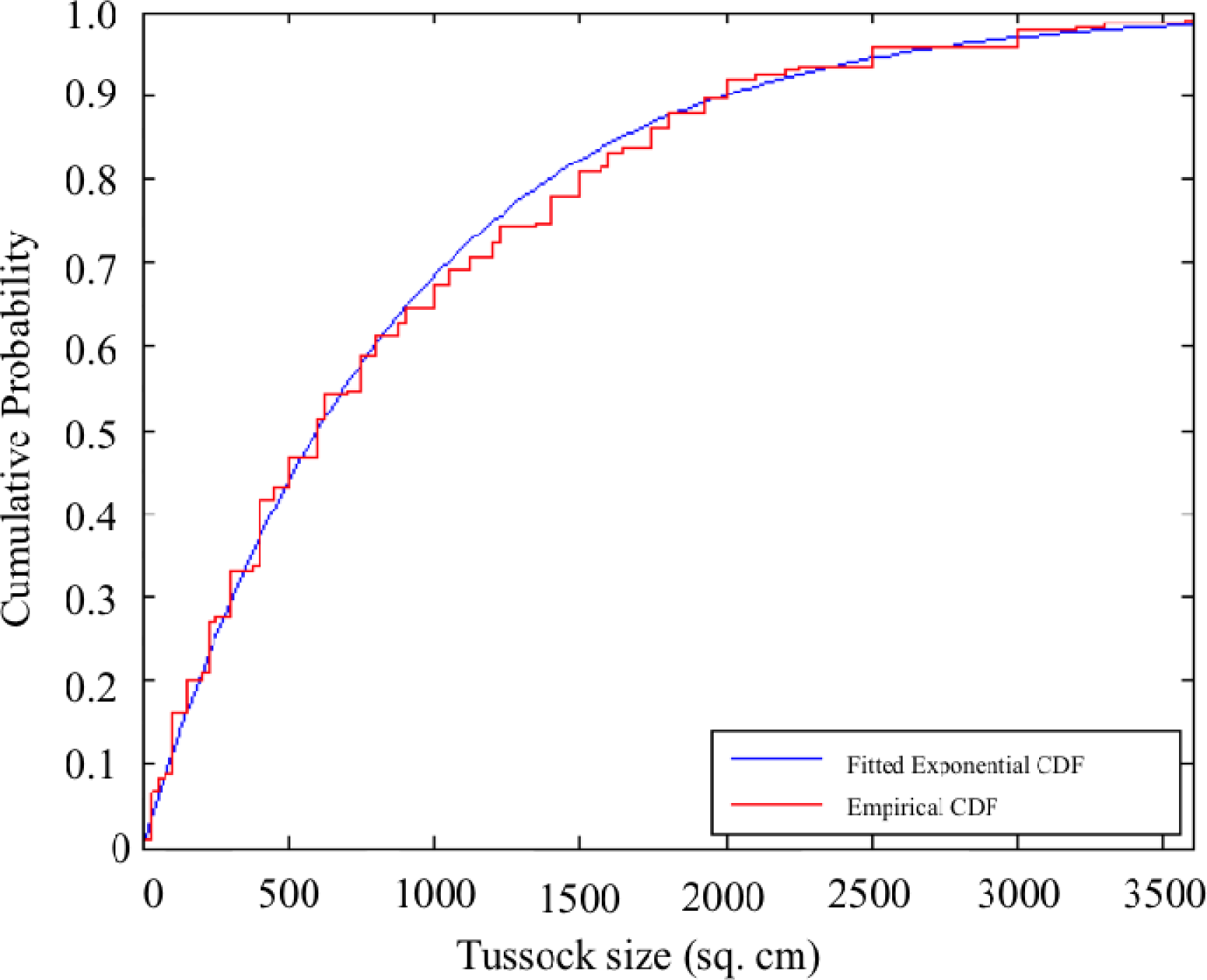
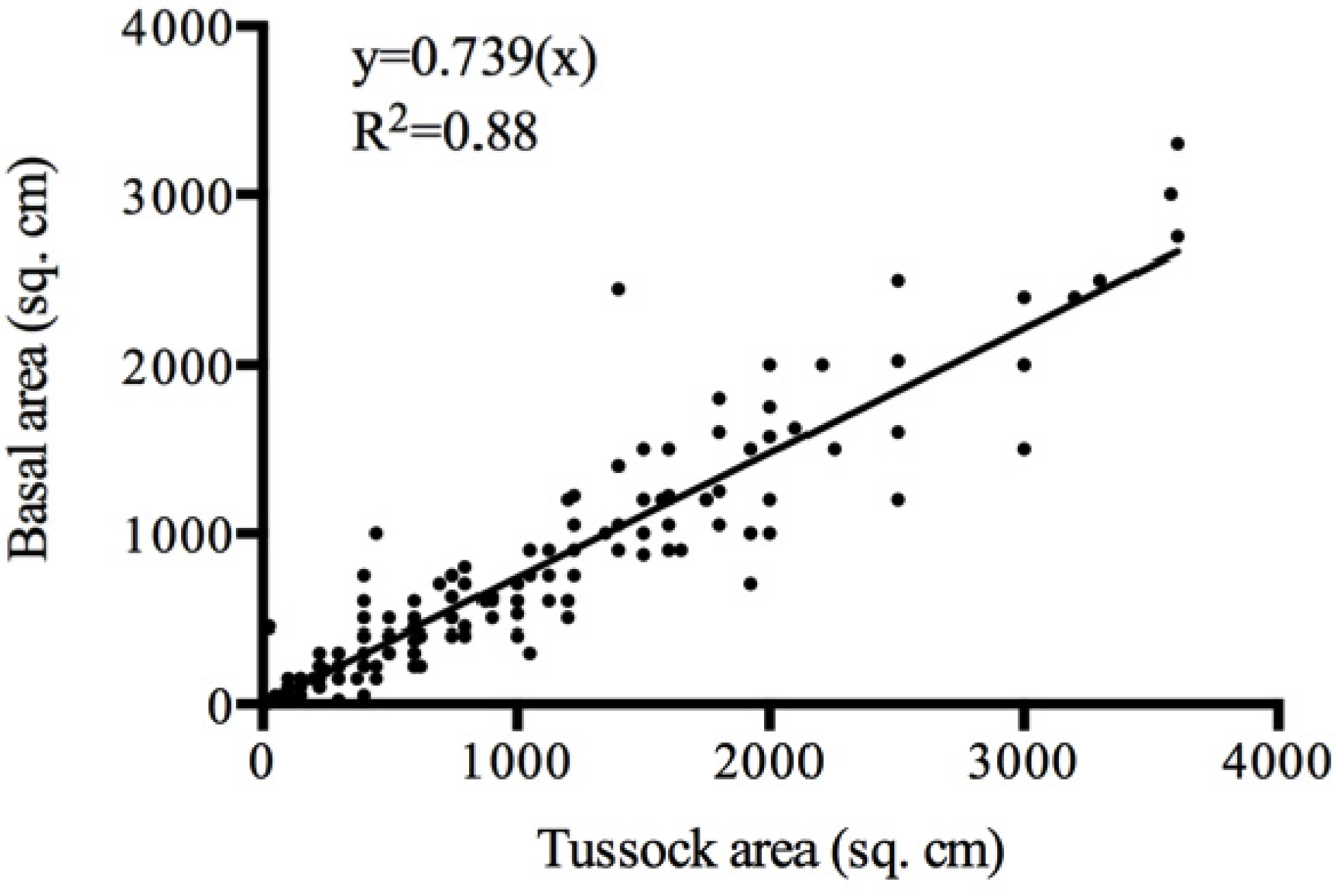
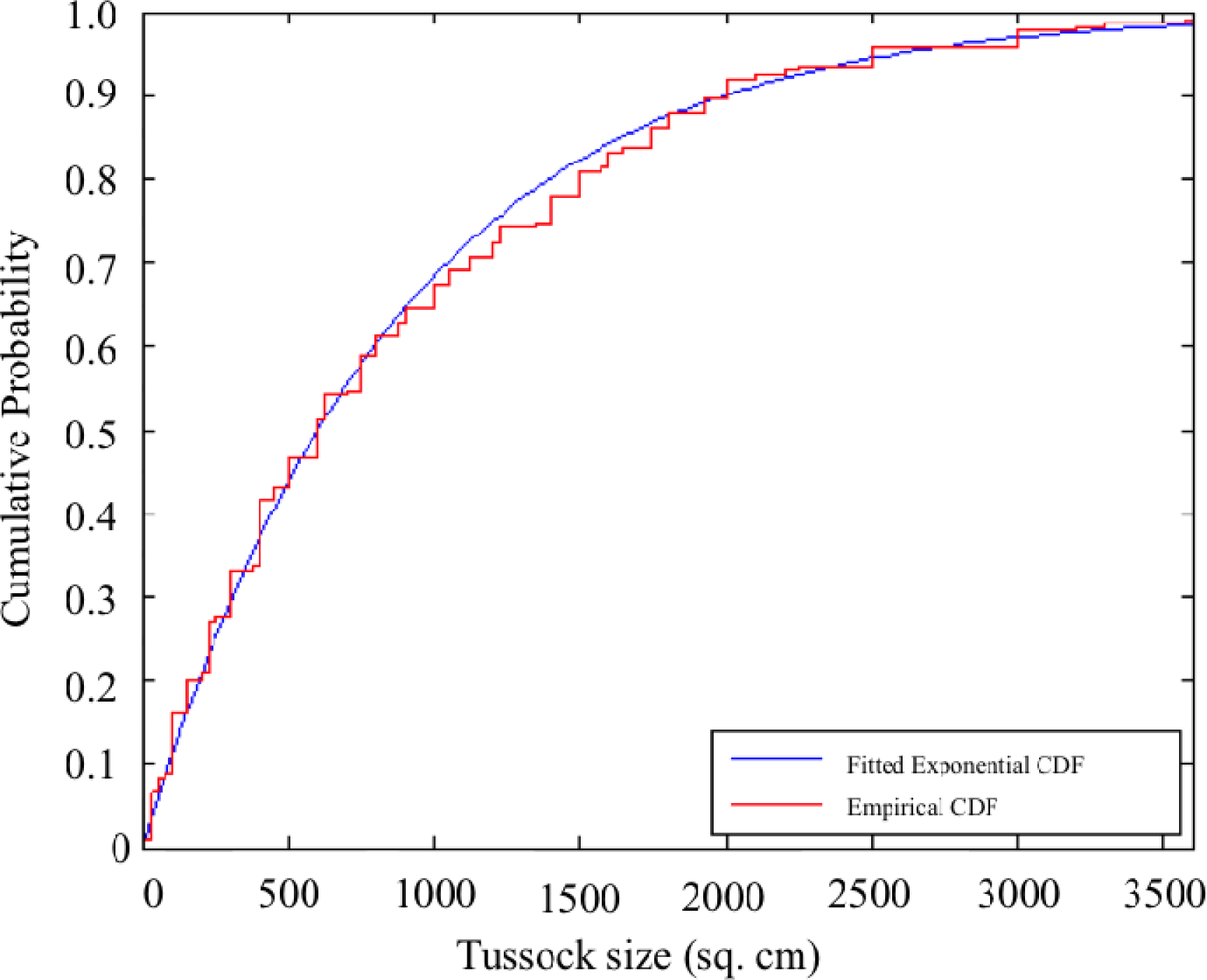
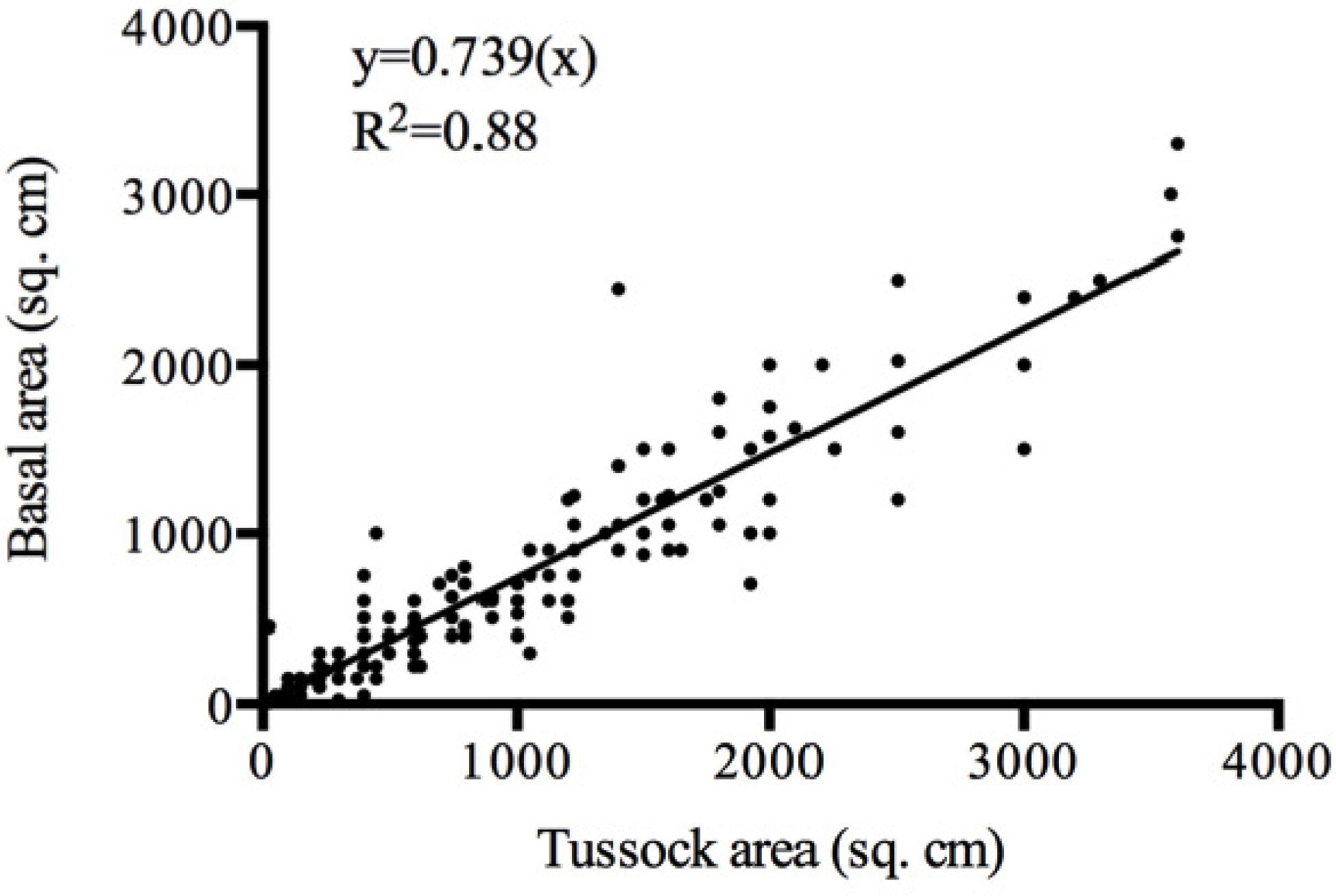
2.5. Statistical Analysis
3. Results and Discussion
4. Conclusions and Recommendations
Acknowledgments
Conflicts of Interest
References
- Berni, J.A.J.; Zarco-Tejada, P.J.; Suarez, L.; Fereres, E. Thermal and narrowband multispectral remote sensing for vegetation monitoring from an unmanned aerial vehicle. IEEE Trans. Geosci. Remote Sens 2009, 47, 722–738. [Google Scholar]
- Knoth, C.; Klein, B.; Prinz, T.; Kleinebecker, T. Unmanned aerial vehicles as innovative remote sensing platforms for high-resolution infrared imagery to support restoration monitoring in cut-over bogs. Appl. Veg. Sci 2013, 16, 509–517. [Google Scholar]
- Anderson, K.; Bennie, J.J.; Milton, E.J.; Hughes, P.D.M.; Lindsay, R.; Meade, R. Combining LiDAR and IKONOS data for eco-hydrological classification of an ombrotrophic peatland. J. Environ. Qual 2010, 39, 260–273. [Google Scholar]
- Dribault, Y.; Chokmani, K.; Bernier, M. Monitoring seasonal hydrological dynamics of Minerotrophic peatlands using multi-date GeoEye-1 high resolution imagery and object-based classification. Remote Sens 2012, 4, 1887–1912. [Google Scholar]
- Middleton, M.; Narhi, P.; Arkimaa, H.; Hyvonen, E.; Kuosmanen, V.; Treitz, P.; Sutinen, R. Ordination and hyperspectral remote sensing approach to classify peatland biotopes along soil moisture and fertility gradients. Remote Sens. Environ 2012, 124, 596–609. [Google Scholar]
- Weissert, L.F.; Disney, M. Carbon storage in peatlands: A case study on the Isle of Man. Geoderma 2013, 204, 111–119. [Google Scholar]
- Garnett, M.H.; Hardie, S.M.L.; Murray, C. Radiocarbon analysis of methane emitted from the surface of a raised peat bog. Soil Biol. Biochem 2012, 50, 158–163. [Google Scholar]
- Roulet, N.T.; Lafleur, P.M.; Richard, P.J.H.; Moore, T.R.; Humphreys, E.R.; Bubier, J. Contemporary carbon balance and late Holocene carbon accumulation in a northern peatland. Glob. Chang. Biol 2007, 13, 397–411. [Google Scholar]
- Gorham, E. Northern peatlands: Role in the carbon budget and probable responses to global warming. Ecol. Appl 1991, 1, 182–195. [Google Scholar]
- Wahlen, M.; Tanaka, N.; Henry, R.; Deck, B.; Zeglen, J.; Vogel, J.S.; Southon, J.; Shemesh, A.; Fairbanks, R.; Broecker, W. Carbon-14 in methane sources and in atmospheric methane: The contribution from fossil carbon. Science 1989, 245, 286–290. [Google Scholar]
- Moore, T.; Dalva, M. The influence of temperature and water table position on methane and carbone dioxide emissions from laboratory columns and peatland soils. J. Soil Sci 1993, 44, 651–654. [Google Scholar]
- Bogart, S.J.; Spiers, G.; Cholewa, E. X-ray mu CT imaging technique reveals corm microstructures of an arctic-boreal cotton-sedge, Eriophorum vaginatum. J. Struct. Biol 2010, 171, 361–371. [Google Scholar]
- Marinier, M.; Glatzel, S.; Moore, T.R. The role of cotton-grass (Eriophorum vaginatum) in the exchange of CO2 and CH4 at two restored peatlands, eastern Canada. Ecoscience 2004, 11, 141–149. [Google Scholar]
- Moore, T.R.; De Young, A.; Bubier, J.L.; Humphreys, E.R.; Lafleur, P.M.; Roulet, N.T. A multi-year record of methane flux at the Mer Bleue Bog, Southern Canada. Ecosystems 2011, 14, 646–657. [Google Scholar]
- Frolking, S.; Roulet, N.T.; Moore, T.R.; Lafleur, P.M.; Bubier, J.L.; Crill, P.M. Modeling seasonal to annual carbon balance of Mer Bleue Bog, Ontario, Canada. Glob. Biogeochem. Cycles 2002, 16, 4:1–4:21. [Google Scholar]
- Lai, D.Y.F.; Roulet, N.T.; Humphreys, E.R.; Moore, T.R.; Dalva, M. The effect of atmospheric turbulence and chamber deployment period on autochamber CO2 and CH4 flux measurements in an ombrotrophic peatland. Biogeosciences 2012, 9, 3305–3322. [Google Scholar]
- Rango, A.; Laliberte, A.; Steele, C.; Herrick, J.E.; Bestelmeyer, B.; Schmugge, T.; Roanhorse, A.; Jenkins, V. Using unmanned aerial vehicles for rangelands: Current applications and future potentials. Environ. Pract 2006, 8, 159–168. [Google Scholar]
- Duan, S.B.; Li, Z.L.; Tang, B.H.; Wu, H.; Ma, L.L.; Zhao, E.Y.; Li, C.R. Land surface reflectance retrieval from hyperspectral data collected by an unmanned aerial vehicle over the Baotou test site. Plos One 2013, 8, e66972. [Google Scholar]
- Forbrich, I.; Kutzbach, L.; Wille, C.; Becker, T.; Wu, J.B.; Wilmking, M. Cross-evaluation of measurements of peatland methane emissions on microform and ecosystem scales using high-resolution landcover classification and source weight modelling. Agric. For. Meteorol 2011, 151, 864–874. [Google Scholar]
- Bubier, J.; Moore, T.; Savage, K.; Crill, P. A comparison of methane flux in a boreal landscape between a dry and a wet year. Glob. Biogeochem. Cy. 2005. [Google Scholar] [CrossRef]
- Thomas, V.; Treitz, P.; Jelinski, D.; Miller, J.; Lafleur, P.; McCaughey, J.H. Image classification of a northern peatland complex using spectral and plant community data. Remote Sens. Environ 2003, 84, 83–99. [Google Scholar]
- Uto, K.; Seki, H.; Saito, G.; Kosugi, Y. Characterization of rice paddies by a UAV-mounted miniature hyperspectral sensor system. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens 2013, 6, 851–860. [Google Scholar]
- Jensen, J.R; Jensen, R.R. Introductory Geographic Information Systems; Pearson: New York USA, 2013. [Google Scholar]
- Ripley, B.D. Spatial Statistics; John-Wiley & Sons: New York, USA, 2004. [Google Scholar]
- Lloyd, C.D. Spatial Data Analysis: An Introduction for GIS Users; Oxford University Press: Oxford, UK, 2010. [Google Scholar]
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Kalacska, M.; Arroyo-Mora, J.P.; De Gea, J.; Snirer, E.; Herzog, C.; Moore, T.R. Videographic Analysis of Eriophorum Vaginatum Spatial Coverage in an Ombotrophic Bog. Remote Sens. 2013, 5, 6501-6512. https://doi.org/10.3390/rs5126501
Kalacska M, Arroyo-Mora JP, De Gea J, Snirer E, Herzog C, Moore TR. Videographic Analysis of Eriophorum Vaginatum Spatial Coverage in an Ombotrophic Bog. Remote Sensing. 2013; 5(12):6501-6512. https://doi.org/10.3390/rs5126501
Chicago/Turabian StyleKalacska, Margaret, J. Pablo Arroyo-Mora, Julie De Gea, Eva Snirer, Carrie Herzog, and Tim R. Moore. 2013. "Videographic Analysis of Eriophorum Vaginatum Spatial Coverage in an Ombotrophic Bog" Remote Sensing 5, no. 12: 6501-6512. https://doi.org/10.3390/rs5126501
APA StyleKalacska, M., Arroyo-Mora, J. P., De Gea, J., Snirer, E., Herzog, C., & Moore, T. R. (2013). Videographic Analysis of Eriophorum Vaginatum Spatial Coverage in an Ombotrophic Bog. Remote Sensing, 5(12), 6501-6512. https://doi.org/10.3390/rs5126501