Area-Based Approach for Mapping and Monitoring Riverine Vegetation Using Mobile Laser Scanning

 ,
,  , ,
, ,
Abstract
:
1. Introduction
2. Materials and Methods
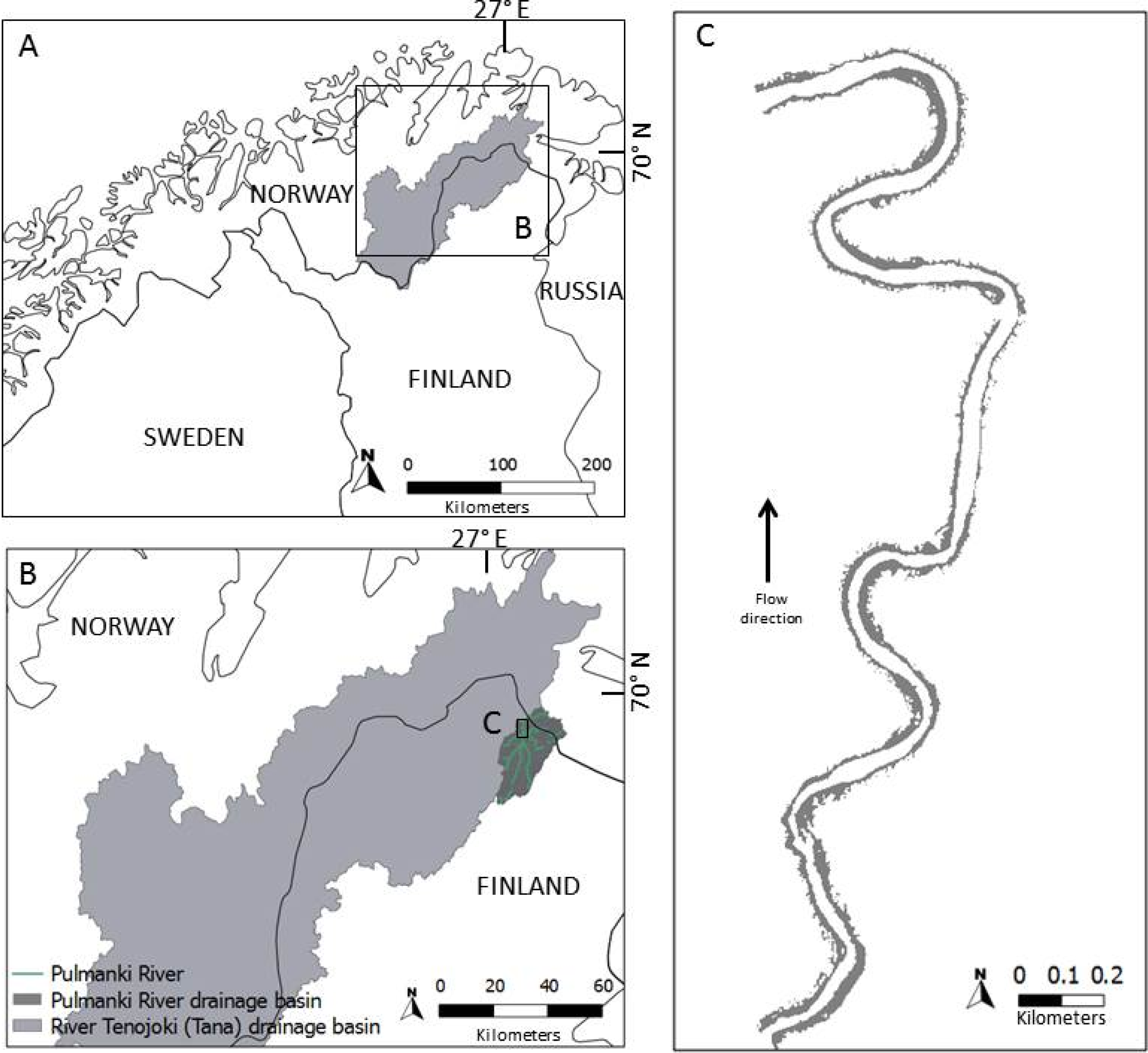
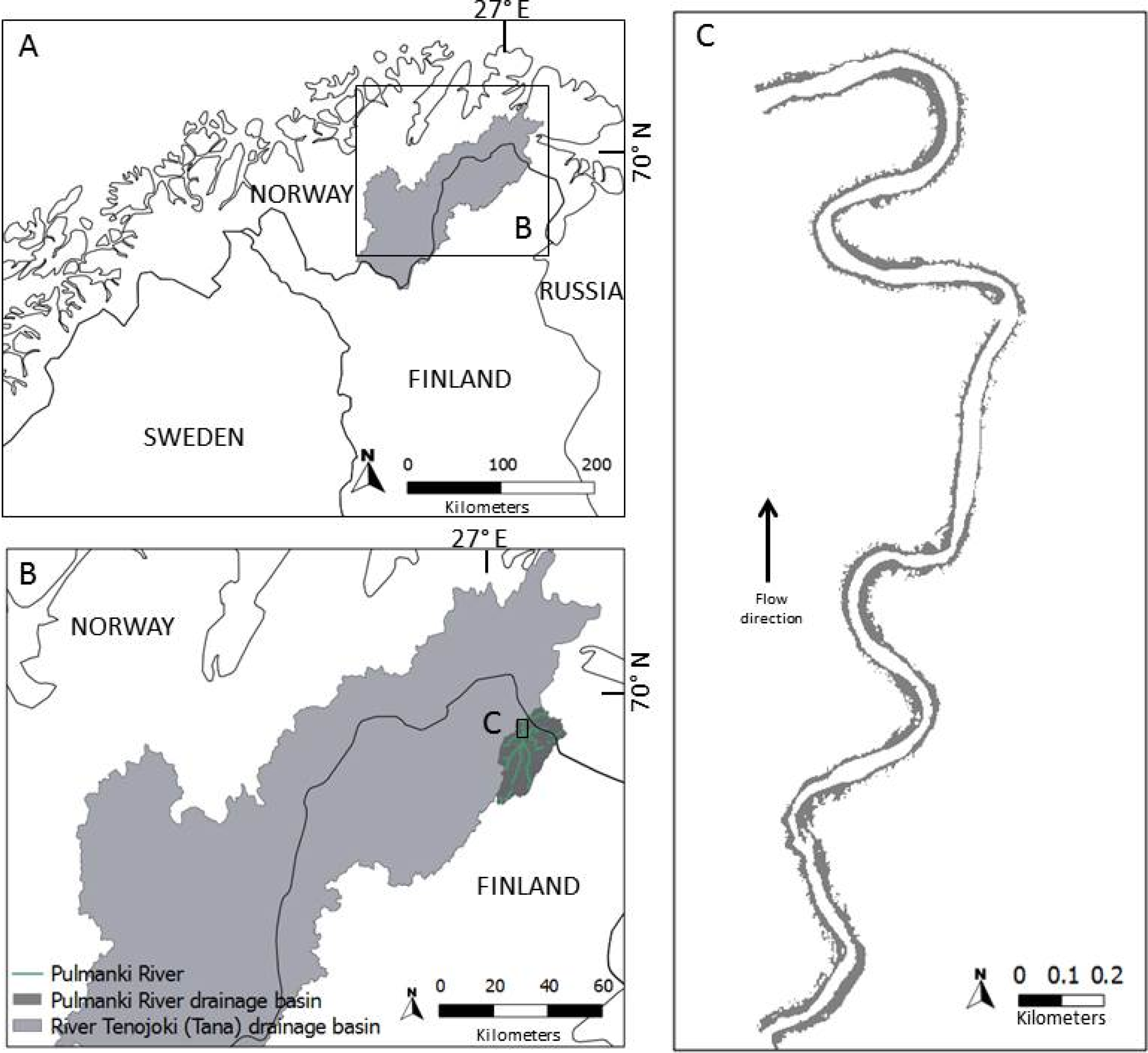
2.1. Study Area
2.2. Mobile Laser Scanning Data
2.3. Aerial Images
2.4. Filtering and Generation of Digital Terrain Models
2.5. Extraction of Metrics from MLS
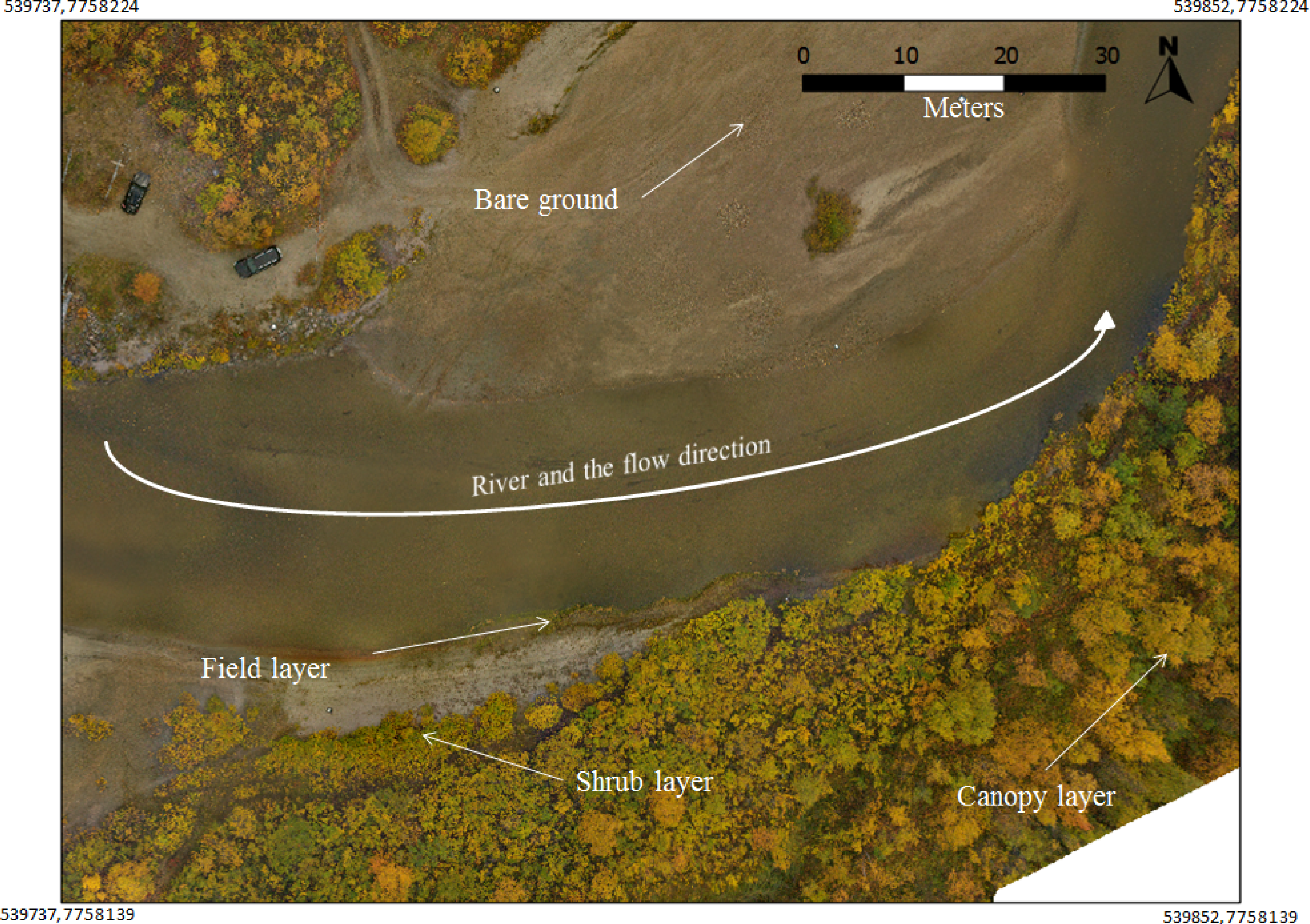
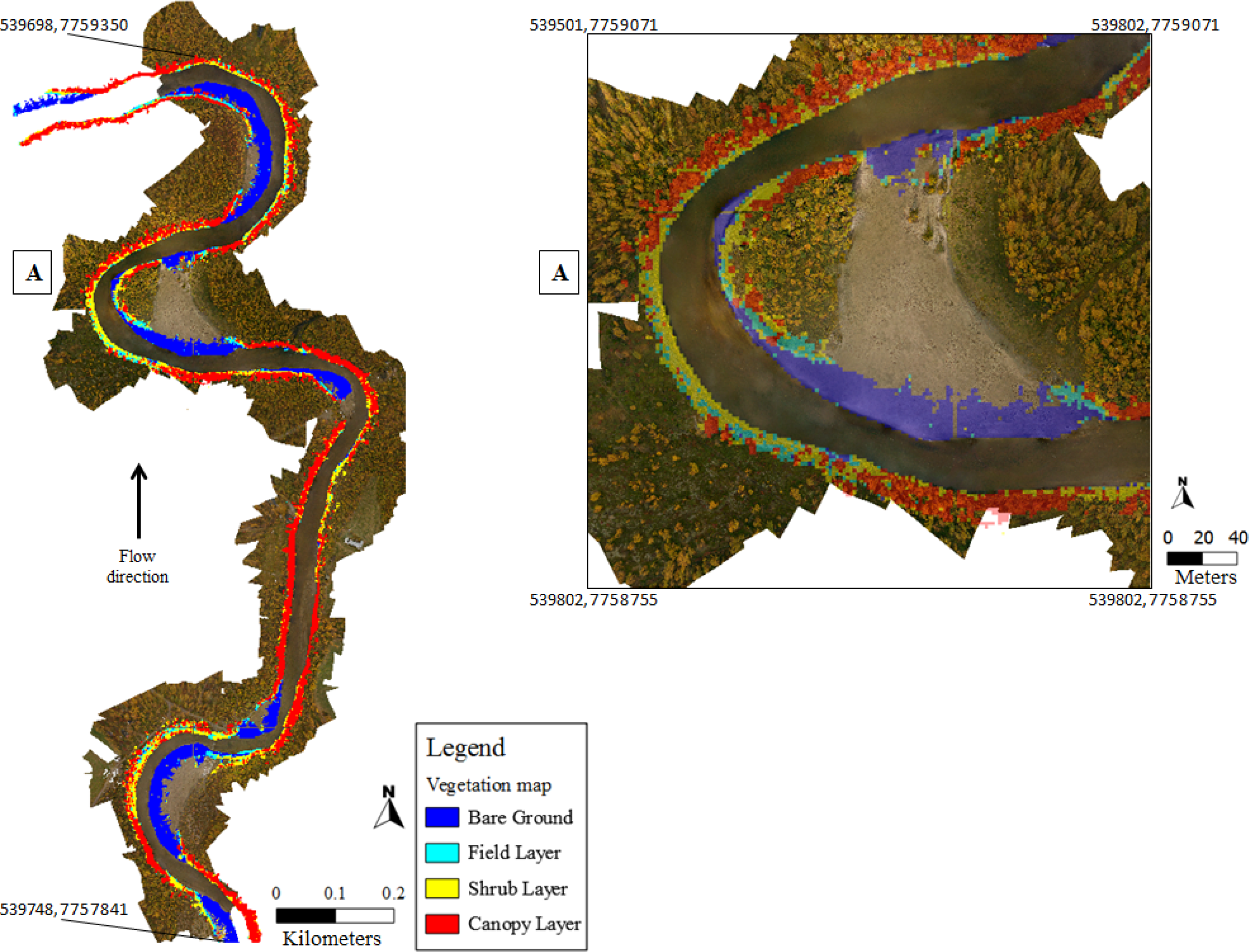
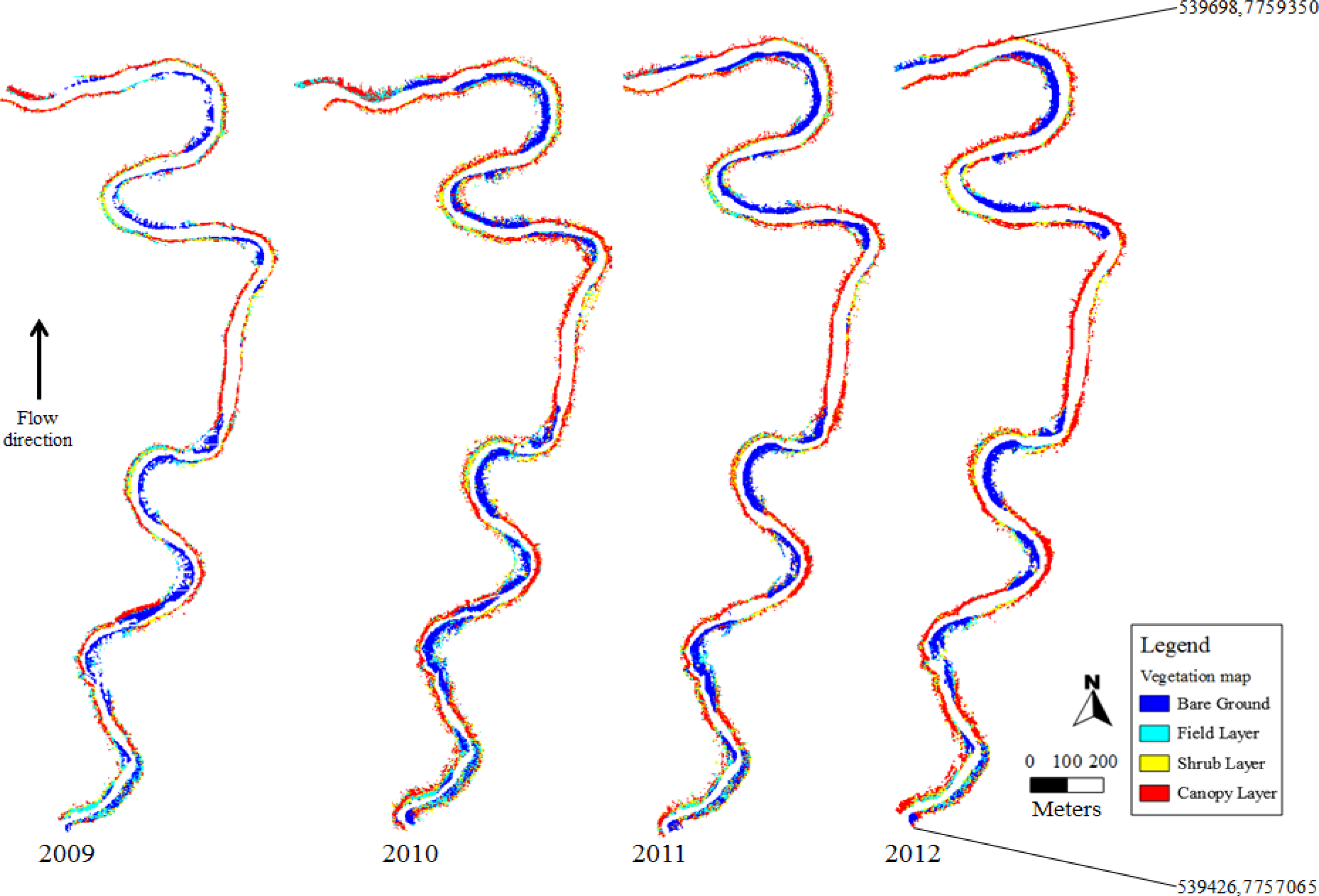
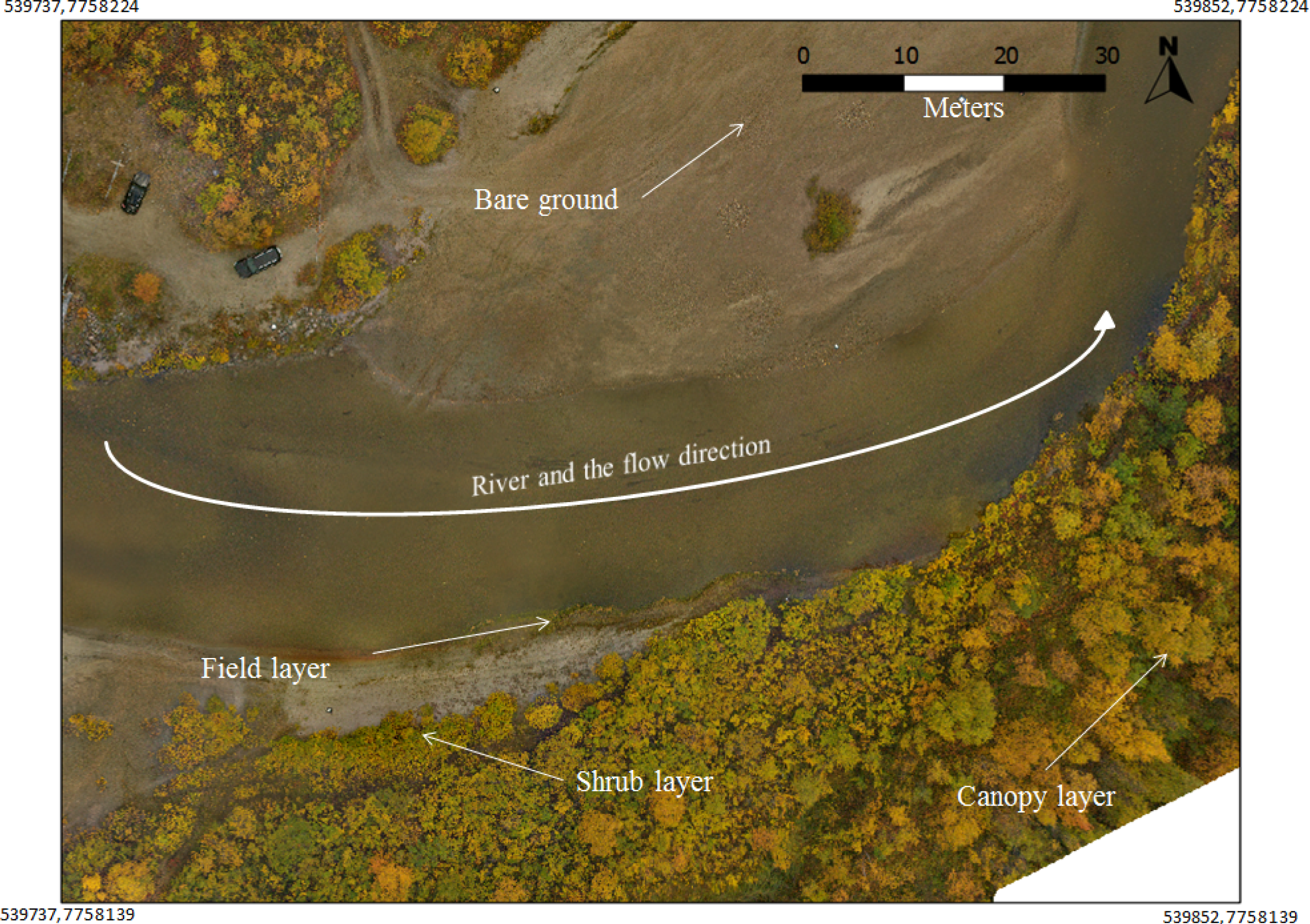
2.6. Vegetation Classes
2.7. Classification of Vegetation Using the Area-Based Approach
3. Results
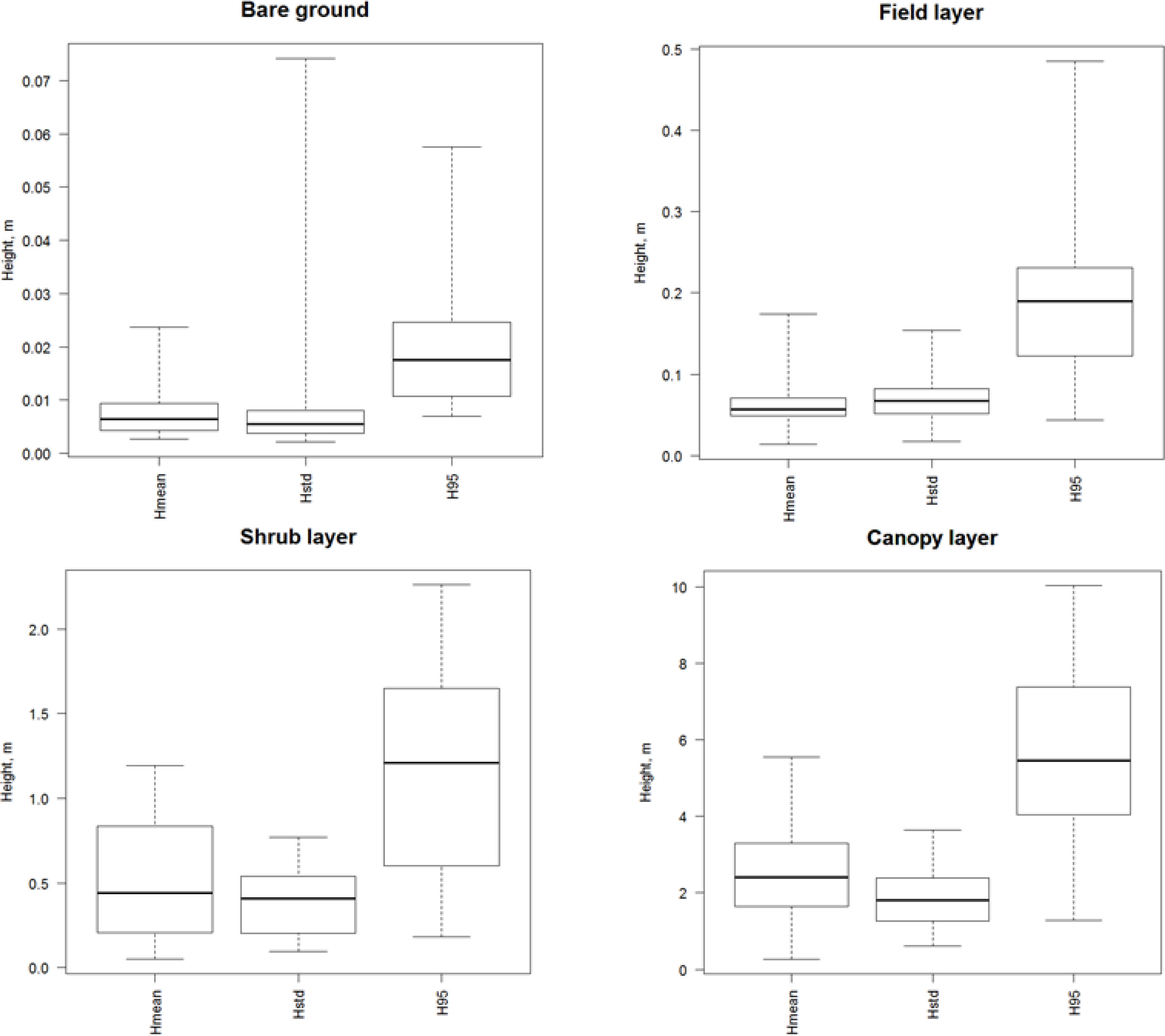
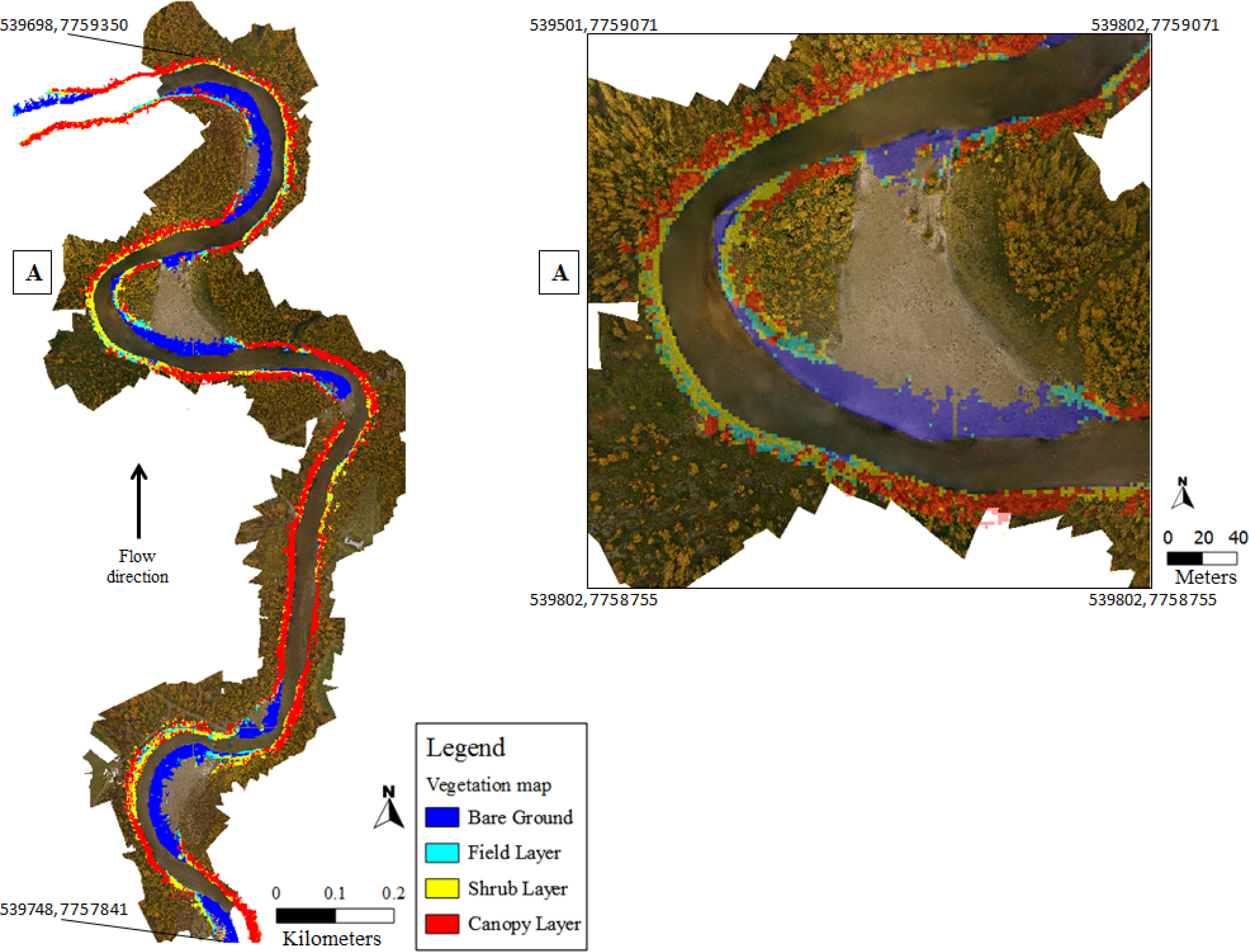
3.1. Accuracy of Mapping Vegetation
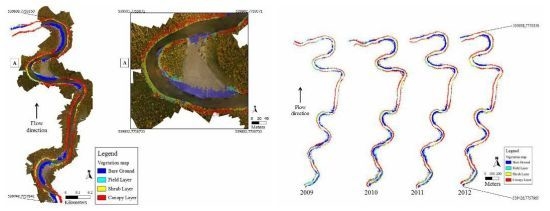
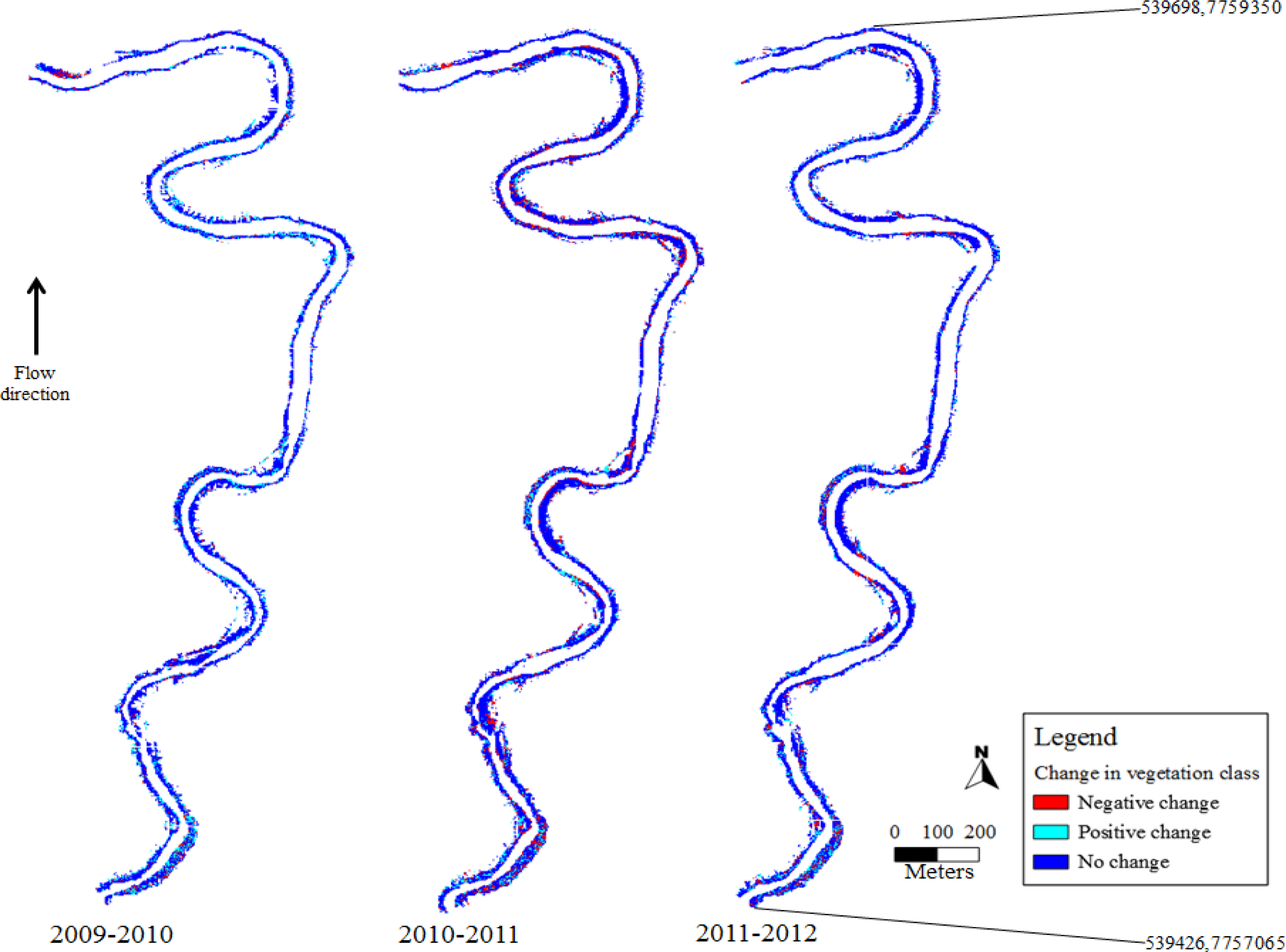
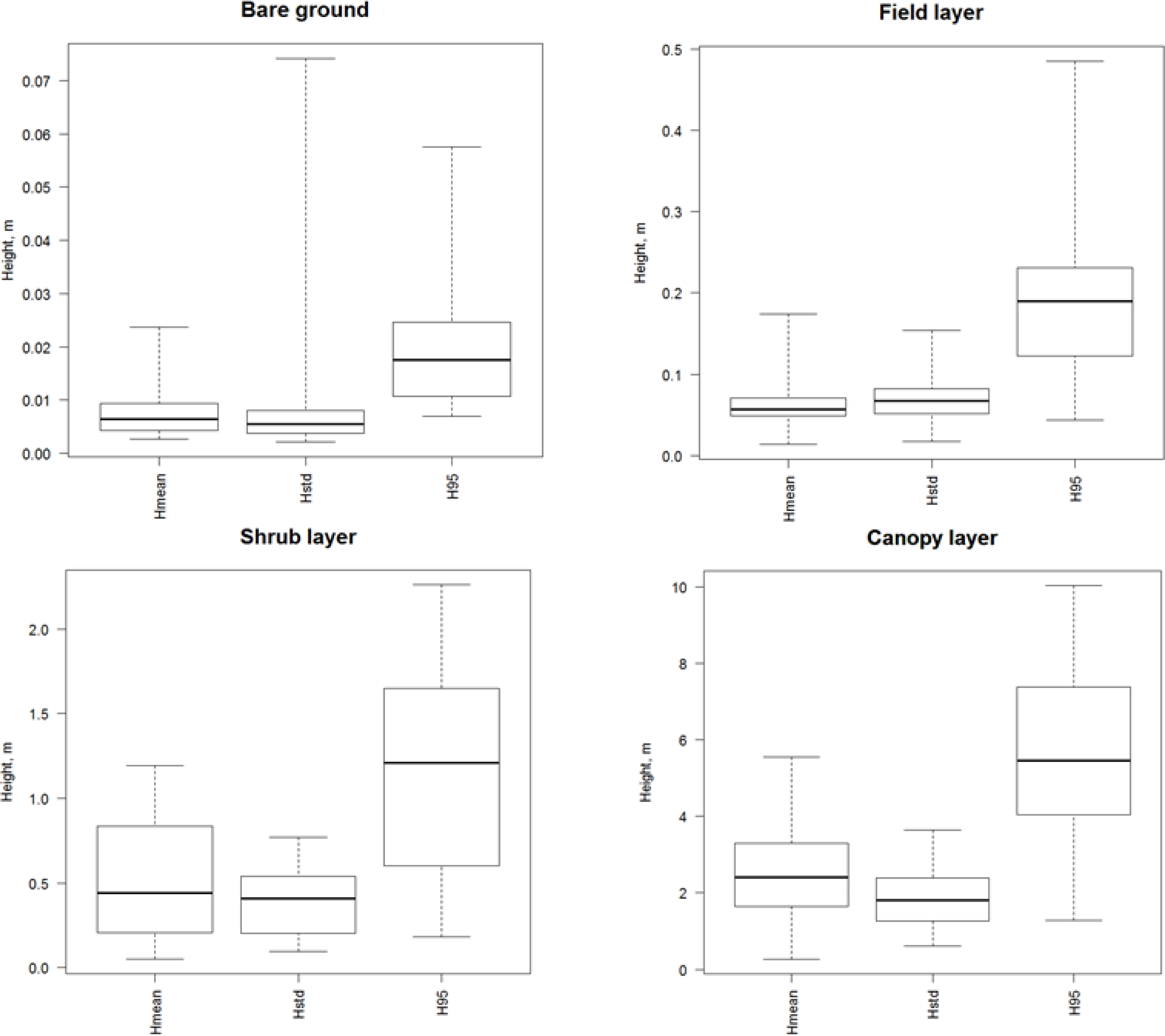
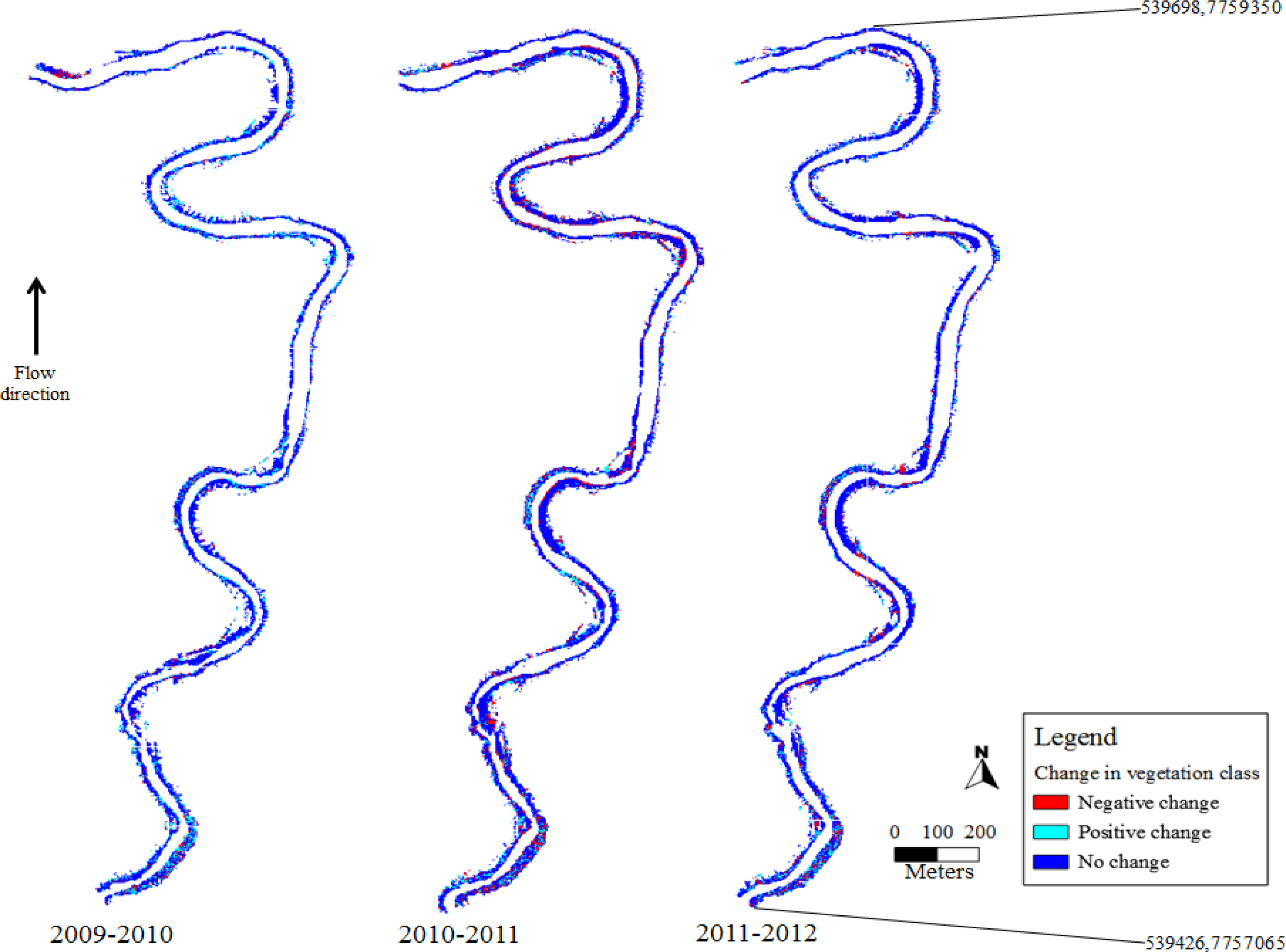
3.2. Monitoring Vegetation Structure
4. Discussion
5. Conclusions
Acknowledgments
Conflict of Interest
References
- Connor, D.J.; Loomis, R.S.; Cassman, K.G. Crop Ecology: Productivity and Management in Agricultural Systems; Cambridge University Press: Cambridge, UK, 2011; p. 351. [Google Scholar]
- Styczen, M.E.; Morgan, R.P.C. Engineering Properties of Vegetation. In Slope Stabilization and Erosion Control: A Bioengineering Approach; Morgan, R.P.C., Rickson, R.J., Eds.; Taylor & Francis: London, UK, 1995. [Google Scholar]
- Beeson, C.E.; Doyle, P.F. Comparison of bank erosion at vegetated and non-vegetated channel bends. J. Am. Water Resour. Assoc 1995, 31, 983–990. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Yu, X.; Kaartinen, H.; Kukko, H.; Holopainen, M. Forest Inventory Using Small-Footprint Airborne Lidar. In Topographic Laser Ranging and Scanning: Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2008; pp. 335–370. [Google Scholar]
- Naesset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ 2002, 80, 88–99. [Google Scholar]
- Koch, B. Status and future of laser scanning, synthetic aperture radar and hyperspectral remote sensing data for forest biomass assessment. ISPRS J. Photogramm. Remote Sens 2010, 65, 581–590. [Google Scholar]
- Næsset, E.; Gobakken, T.; Holmgren, J.; Hyyppä, H.; Hyyppä, J.; Maltamo, M.; Nilsson, M.; Olsson, H.; Persson, Å.; Söderman, U. Laser scanning of forest resources: The Nordic experience. Scand. J. For. Res 2004, 19, 482–499. [Google Scholar]
- Vastaranta, M.; Holopainen, M.; Karjalainen, M.; Kankare, V.; Hyyppä, J.; Kaasalainen, S. TerraSAR-X stereo SAR and airborne scanning LiDAR height metrics in imputation of forest above-ground biomass and stem volume. IEEE Trans. Geosci. Remote Sens. 2013. [Google Scholar] [CrossRef]
- Kankare, V.; Vastaranta, M.; Holopainen, M.; Räty, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Alho, P.; Viitala, R. Retrieval of forest aboveground biomass and stem volume with airborne scanning LiDAR. Remote Sens 2013, 5, 2257–2274. [Google Scholar]
- Raumonen, P.; Kaasalainen, M.; Åkerblom, M.; Kaasalainen, S.; Kaartinen, H.; Vastaranta, M.; Holopainen, M.; Disney, M.; Lewis, P. Fast automatic precision tree models from terrestrial laser scanner data. Remote Sens 2013, 5, 491–520. [Google Scholar]
- Kankare, V.; Holopainen, M.; Vastaranta, M.; Puttonen, E.; Yu, X.; Hyyppä, J.; Vaaja, M.; Hyyppä, H.; Alho, P. Individual tree biomass estimation using terrestrial laser scanning. ISPRS J. Photogramm. Remote Sens 2013, 75, 64–75. [Google Scholar]
- Thoma, D.P.; Gupta, S.C.; Bauer, M.E.; Kirchoff, C.E. Airborne laser scanning for riverbank erosion assessment. Remote Sens. Environ 2005, 95, 493–501. [Google Scholar]
- De Rose, R.C.; Basher, L.R. Measurement of river bank and cliff erosion from sequential LiDAR and historical aerial photography. Geomorphology 2011, 126, 132–147. [Google Scholar]
- Nasermoaddeli, M.H.; Pasche, E. Application of Terrestrial 3D Laser Scanner in Quantification of the Riverbank Erosion and Deposition. Proceedings of International Conference on Fluvial Hydraulics (Riverflow 2008), Cesme-Ismir, Turkey, 3–5 September 2008; 3, pp. 2407–2416.
- Resop, J.P.; Hession, W.C. Terrestrial laser scanning for monitoring streambank retreat: Comparison with traditional surveying techniques. J. Hydraul. Eng 2010, 136, 794–798. [Google Scholar]
- Vaaja, M.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Hyyppä, H.; Alho, P. Mapping topography changes and elevation accuracies using a mobile laser scanner. Remote Sens 2011, 3, 587–600. [Google Scholar]
- O’Neal, M.A.; Pizzuto, J.E. The rates and spatial patterns of annual riverbank erosion revealed through terrestrial laser-scanner surveys of the Sourth River, Virginia. Earth Surf. Process. Landf 2011, 36, 695–701. [Google Scholar]
- Kasvi, E.; Vaaja, M.; Petteri, A.; Hyyppä, H.; Hyyppä, J.; Kaartinen, H.; Kukko, A. Morphological changes on meander point bars associated with flow structure at different discharges. Earth Surf. Process. Landf 2013, 38, 577–590. [Google Scholar]
- Alho, P.; Kukko, A.; Hyyppa, H.; Kaartinen, H.; Hyyppä, J.; Jaakkola, A. Application of boat-based laser river survey. Earth Surf. Process. Landf 2009, 34, 1831–1838. [Google Scholar]
- Barber, D.M.; Mills, J.P. Vehicle Based Waveform Laser Scanning in a Coastal Environment. Proceedings of the 5th International Symposium on Mobile Mapping Technology, Pradua, Italy, 29–31 May 2007.
- Bitenc, M.; Lindenbergh, R.; Khoshelham, K.; van Waarden, A.P. Evaluation of a LiDAR land-based mobile mapping system for monitoring sandy coasts. Remote Sens 2011, 3, 1472–1491. [Google Scholar]
- Kukko, A.; Kaartinen, H.; Hyyppä, J.; Chen, Y. Multiplatform mobile laser scanning: Usability and performance. Sensors 2012, 12, 11712–11733. [Google Scholar]
- Glennie, C.; Brooks, B.; Ericksen, T.; Hauser, D.; Hudnut, K.; Foster, J.; Avery, J. Compact multipurpose mobile laser scanning system—Initial tests and results. Remote Sens 2013, 5, 521–538. [Google Scholar]
- Graham, L. Mobile mapping systems overview. Photogramm. Eng. Remote Sens 2010, 76, 222–228. [Google Scholar]
- Petrie, G. Mobile mapping systems: An introduction to the technology. GeoInformatics 2010, 13, 32–43. [Google Scholar]
- Simon, A.; Curini, A.; Darby, S.E.; Langedoen, E.J. Bank and near-bank processes in an incised channel. Geomorphology 2000, 35, 193–217. [Google Scholar]
- Rinaldi, M.; Darby, S.E. Modelling River-Bank-Erosion Processes and Mass Failure Mechanisms: Progress towards Fully Coupled Simulations. In Gravel-Bed Rivers VI: From Process Understanding to River Restoration; Habersack, H., Piégay, H., Rinaldi, M., Elsevier, B.V., Eds.; Elsevier Science Publishing Company: Oxford, UK, 2008; pp. 213–239. [Google Scholar]
- Parker, C.; Simon, A.; Thorne, C.R. The effects of variability in bank material properties on riverbank stability: Goodwin Creek, Mississippi. Geomorphology 2011, 101, 533–543. [Google Scholar]
- Motta, D.; Abad, J.D.; Langedoen, E.J.; Garcia, M.H. A simplified 2D model for meander migration with physically-based bank evolution. Geomorphology 2012, 163–164, 10–25. [Google Scholar]
- Millar, R.G. Influence of bank vegetation on alluvial channel patterns. Water Resour. Res 2000, 36, 1109–1118. [Google Scholar]
- Smith, D.G. Effect of vegetation on lateral migration of anastomosed channels of a glacier meltwater river. Geol. Soc. Am. Bull 1976, 87, 857–860. [Google Scholar]
- Wynn, T.M. The Effects of Vegetation on Stream Bank Erosion.
- Wynn, T.M.; Mostaghimi, S. The effects of vegetation and soil type on stream bank erosion, Southwestern Virginia, USA. J. Am. Water Resour. Assoc 2006, 42, 69–82. [Google Scholar]
- Gurnell, A. Plants as river system engineers. Earth Surf. Process. Landf. 2013. [Google Scholar] [CrossRef]
- Camporeale, C.; Ridolfi, L. Riparian vegetation distribution induced by river flow variability: A stochastic approach. Water Resour. Res. 2006. [Google Scholar] [CrossRef]
- Pollen-Bankhead, N.; Simon, A.; Jaeger, K.; Wohl, E. Destabilization of streambanks by removal of invasive species in Canyon de Chelly National Monument, Arizona. Geomorphology 2009, 103, 363–374. [Google Scholar]
- Chanson, H. The Hydraulics of Open Channel Flow—An Introduction; Butterworth Heinemann: Oxford, UK, 1999; p. 495. [Google Scholar]
- Hunter, N.M.; Bates, P.D.; Horrit, M.S.; Wilson, M.D. Simple spatially-distributed models for predicting flood inundation: A review. Geomorphology 2007, 90, 208–225. [Google Scholar]
- Midgley, T.L.; Fox, G.A.; Heeren, D.M. Evaluation of the bank stability and toe erosion model (BSTEM) for predicting lateral retreat on composite streambanks. Geomorphology 2012, 145–146, 107–114. [Google Scholar]
- Horrit, M.; Bates, P. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol 2002, 268, 87–99. [Google Scholar]
- Pasternack, G B.; Gilbert, A.T.; Wheaton, J.M.; Buckland, E.M. Error propagation for velocity and shear stress prediction using 2D models for environmental management. J. Hydrol 2006, 328, 227–241. [Google Scholar]
- McMillan, H.K.; Brasington, J. Reduced complexity strategies for modelling urban flood-plain inundation. Geomorphology 2007, 90, 226–243. [Google Scholar]
- Pender, G.; Néelz, S. Use of computer models of flood inundation to facilitate communication in flood risk management. Environ. Hazard 2007, 7, 106–114. [Google Scholar]
- Koivumäki, L.; Alho, P.; Lotsari, E.; Käyhkö, J.; Saari, A.; Hyyppä, H. Uncertainties in flood risk mapping: A case study on estimating building damages for a river flood in Finland. J. Flood Risk Manag 2010, 3, 166–183. [Google Scholar]
- Kasvi, E.; Alho, P.; Vaaja, M.; Hyyppä, H.; Hyyppä, J. Spatial and temporal distribution of fluvio-morphological processes on a meander point bar during a flood event. Hydrol. Res. 2013. [Google Scholar] [CrossRef]
- Lotsari, E.; Wainwright, D.; Corner, G.D.; Alho, P.; Käyhkö, J. Surveyed and modelled one-year morphodynamics in the braided lower Tana River. Hydrol. Process. 2013. [Google Scholar] [CrossRef]
- Alho, P.; Vaaja, M.; Kukko, A.; Kasvi, E.; Kurkela, M.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H. Mobile laser scanning in fluvial geomorphology: Mapping and change detection of point bars. Z. Geomorphol. Suppl. Issue 2011, 55, 31–50. [Google Scholar]
- Hohental, J.; Alho, P.; Hyyppä, J.; Hyyppä, H. Laser scanning applications in fluvial studies. Progr. Phys.Geogr 2011, 35, 782–809. [Google Scholar]
- Jaakkola, A.; Hyyppä, J.; Hyyppä, H.; Kukko, A. Retrieval algorithms for road surface modelling using laser-based mobile mapping. Sensors 2008, 8, 5238–5249. [Google Scholar]
- Kukko, A. Road Environment Mapper-3D Data Capturing with Mobile Mapping. Licentiate’s Thesis, Helsinki University of Technology, Espoo, Finland, 17 September 2009..
- Goulette, F.; Nashashibi, F.; Abuhadrous, I.; Ammoun, S.; Laurgeau, C. An Integrated On-board Laser Range Sensing System for On-the-Way City and Road Modelling. Proceedings of the ISPRS Commission I Symposium—From Sensors to Imagery, Paris, France, 3–5 July 2006; pp. 43:1–43:6.
- Jochem, A.; Höfle, B.; Rutzinger, M. Extraction of vertical walls from mobile laser scanning 441 data for solar potentiaL Assessment. Remote Sens 2011, 3, 650–667. [Google Scholar]
- Wu, B.; Yu, B.; Yue, W.; Shu, S.; Tan, W.; Hu, C.; Huang, Y.; Wu, J.; Liu, H. A voxel-based method for automated identification and morphological parameters estimation of individual street trees from mobile laser scanning data. Remote Sens 2013, 5, 584–611. [Google Scholar]
- Wang, Y.; Liang, X.; Flener, C.; Kukko, A.; Kaartinen, H.; Kurkela, M.; Vaaja, M.; Hyyppä, H.; Alho, P. 3D modeling of coarse fluvial sediments based on mobile laser scanning data. Remote Sens 2013, 5, 4571–4592. [Google Scholar]
- Holopainen, M.; Vastaranta, M.; Kankare, V.; Hyyppä, J.; Liang, X.; Litkey, P.; Yu, X.; Kaartinen, H.; Kukko, A.; Kaasalainen, S.; et al. The use of ALS, TLS and VLS Measurements in Mapping and Monitoring Urban Trees. Proceedings of Joint Urban Remote Sensing Event, JURSE, Munich, Germany, 11–13 April 2011. [CrossRef]
- Holopainen, M.; Kankare, V.; Vastaranta, M.; Liang, X.; Lin, Y.; Vaaja, M.; Yu, X.; Hyyppä, J.; Hyyppä, H.; Kaartinen, H.; et al. Urban tree mapping with airborne, terrestrial, and mobile laser scanning. Urban For. Urban Green. 2013; in press. [Google Scholar]
- Jaakkola, A.; Hyyppä, J.; Kukko, A.; Yu, X.; Kaartinen, H.; Lehtomäki, M.; Lin, Y. A low-cost multi-sensoral mobile mapping system and its feasibility for tree measurements. ISPRS J. Photogramm. Remote Sens 2010, 65, 514–522. [Google Scholar]
- Zlinszky, A.; Mücke, W.; Lehner, H.; Briese, A.; Pfeifer, N. Categorizing wetland vegetation by airborne laser scanning on Lake Balaton and Kis-Balaton, Hungary. Remote Sens 2012, 4, 1617–1650. [Google Scholar]
- Farid, A.; Rautenkranz, D.; Goodrich, D.C.; Marsh, S.E.; Sorooshian, S. Riparian vegetation classification from airborne laser scanning data with an emphasis on cottonwood trees. Can. J. Remote Sens 2006, 32, 15–18. [Google Scholar]
- Brodu, N.; Lague, D. 3D terrestrial lidar data classification of complex natural scenes using a multi-scale dimensionality criterion: Application in geomorphology. ISPRS J. Photogramm. Remote Sens 2012, 68, 121–134. [Google Scholar]
- Kukko, A.; Andrei, C.-O.; Salminen, V.-M.; Kaartinen, H.; Chen, Y.; Rönnholm, P.; Hyyppä, H.; Hyyppä, J.; Chen, R.; Haggrén, H.; et al. Road Environment Mapping System of the Finnish Geodetic Institute—FGI ROAMER. Proceedings of ISPRS Workshop on Laser Scanning 2007 and (SilviLaser 2007), Espoo, Finland, 12–14 September 2007; 36, pp. 241–247.
- Kaartinen, H.; Hyyppä, J.; Kukko, A.; Jaakkola, A.; Hyyppä, H. Benchmarking the performance of mobile laser scanning systems using a permanent test field. Sensors 2012, 12, 12814–12835. [Google Scholar]
- Axelsson, P. DEM Generation from Laser Scanner Data Using Adaptive TIN Models. Proceedings of XIX ISPRS Congress, Amsterdam, The Netherlands, 16–22 July 2000; 33, pp. 110–117.
- Lotsari, E.; Vaaja, M.; Flener, C.; Kaartinen, H.; Kukko, A.; Kasvi, E.; Hyyppä, H.; Hyyppä, J.; Alho, P. Annual bank and point bar morphodynamics of a meandering river based on high-accuracy multi-temporal laser scanning and flow data. Water Resour. Res, 2013; under review. [Google Scholar]
- McGaughey, R.J. FUSION/LDV: Software for LiDAR Data Analysis and Visualization, FUSION Version 3.30; February 2013. Available online: http://forsys.cfr.washington.edu/fusion/FUSION_manual.pdf (accessed on 11 April 2013).
- Breiman, L. Random forests. Mach. Learn 2001, 45, 5–32. [Google Scholar]
- Jothityangkoon, C.; Sivapalan, M. Towards estimation of extreme floods: Examination of the roles of runoff process changes and floodplain flows. J. Hydrol 2003, 281, 206–229. [Google Scholar]
- Makaste, B.; Maas, G.J.; van den Brink, C.; Wolfert, H.P. The influence of floodplain vegetation succession on hydraulic roughness: Is ecosystem rehabilitation in dutch embanked floodplains compatible with flood safety standards? Ambio 2011, 40, 370–376. [Google Scholar]
- Rinaldi, M.; Mengoni, B.; Luppi, L.; Darby, S.E.; Mosselman, E. Numerical simulation of hydrodynamics and bank erosion in a river bend. Water Resour. Res 2008, 44, 1–17. [Google Scholar]
- Yu, X.; Hyyppä, J.; Vastaranta, M.; Holopainen, M. Predicting individual tree attributes from airborne laser point clouds based on random forest technique. ISPRS J. Photogramm. Remote Sens 2011, 66, 28–37. [Google Scholar]
- Hudak, A.; Crookston, N.; Evans, J.; Hall, D.; Falkowski, M. Nearest neighbor imputation of species-level, plot-scale forest structure attributes from LiDAR data. Remote Sens. Environ 2008, 112, 2232–2245. [Google Scholar]
- Latifi, H.; Nothdurft, A.; Koch, B. Non-parametric prediction and mapping of standing timber volume and biomass in a temperate forest: Application of multiple optical/LiDAR—Derived predictors. Forestry 2010, 83, 395–407. [Google Scholar]
- Falkowski, M.; Hudak, A.; Crookston, N.; Gessler, P.; Smith, A. Landscape-scale parameterization of a tree-level forest growth model: A k-NN imputation approach incorporating LiDAR data. Can. J. Forest Res 2010, 40, 184–199. [Google Scholar]
- Wasser, L.; Day, R.; Chasmer, L.; Taylor, A. Influence of vegetation structure on lidar-derived canopy height and fractional cover in forested riparian buffers during leaf-off and leaf-on conditions. PLoS One 2013, 8, e54776. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Date | fs (Hz) | fp (kHz) | hs (m) | ra (°) | |
|---|---|---|---|---|---|
| 2009 | 3 September | 30 | 120 | 2.5 | 0.090 |
| 2010 | 31 August | 49 | 244 | 2.5 | 0.072 |
| 2011 | 8 September | 49 | 244 | 2.5 | 0.072 |
| 2012 | 13 September | 49 | 488 | 2.5 | 0.036 |
| Metric | Description |
|---|---|
| Total Return | Total number of laser returns |
| Hmin | Minimum height of laser returns |
| Hmax | Maximum height of laser returns |
| Hmean | Arithmetic mean of laser heights |
| Hstd | Standard deviation of laser heights |
| H1-H99 | Percentiles of laser heights |
| Training Accuracy (%) | Testing Accuracy (%) | Kappa Training | Kappa Testing | |
|---|---|---|---|---|
| Bare Ground | 100.00 | 79.45 | 0.99 | 0.82 |
| Field Layer | 88.00 | 35.00 | 0.91 | 0.39 |
| Shrub Layer | 97.83 | 45.16 | 0.93 | 0.29 |
| Canopy Layer | 97.40 | 100.00 | 0.98 | 0.72 |
| Average | 97.39 | 72.64 | 0.96 | 0.61 |
| True/Estimated | Bare Ground | Field Layer | Shrub Layer | Canopy Layer | Total |
|---|---|---|---|---|---|
| Bare Ground | 58 | 4 | 8 | 3 | 73 |
| Field Layer | 1 | 14 | 16 | 9 | 40 |
| Shrub Layer | 0 | 1 | 14 | 16 | 31 |
| Canopy Layer | 0 | 0 | 0 | 68 | 68 |
© 2013 by the authors; licensee MDPI, Basel, Switzerland This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Saarinen, N.; Vastaranta, M.; Vaaja, M.; Lotsari, E.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Holopainen, M.; Hyyppä, H.; Alho, P. Area-Based Approach for Mapping and Monitoring Riverine Vegetation Using Mobile Laser Scanning. Remote Sens. 2013, 5, 5285-5303. https://doi.org/10.3390/rs5105285
Saarinen N, Vastaranta M, Vaaja M, Lotsari E, Jaakkola A, Kukko A, Kaartinen H, Holopainen M, Hyyppä H, Alho P. Area-Based Approach for Mapping and Monitoring Riverine Vegetation Using Mobile Laser Scanning. Remote Sensing. 2013; 5(10):5285-5303. https://doi.org/10.3390/rs5105285
Chicago/Turabian StyleSaarinen, Ninni, Mikko Vastaranta, Matti Vaaja, Eliisa Lotsari, Anttoni Jaakkola, Antero Kukko, Harri Kaartinen, Markus Holopainen, Hannu Hyyppä, and Petteri Alho. 2013. "Area-Based Approach for Mapping and Monitoring Riverine Vegetation Using Mobile Laser Scanning" Remote Sensing 5, no. 10: 5285-5303. https://doi.org/10.3390/rs5105285
APA StyleSaarinen, N., Vastaranta, M., Vaaja, M., Lotsari, E., Jaakkola, A., Kukko, A., Kaartinen, H., Holopainen, M., Hyyppä, H., & Alho, P. (2013). Area-Based Approach for Mapping and Monitoring Riverine Vegetation Using Mobile Laser Scanning. Remote Sensing, 5(10), 5285-5303. https://doi.org/10.3390/rs5105285