Mapping Canopy Height and Growing Stock Volume Using Airborne Lidar, ALOS PALSAR and Landsat ETM+

Abstract
:1. Introduction
1.1. Background
1.2. Objectives
- the performance of a stand-level retrieval of CH and GSV with ALS data in commercial forest
- the performance of a retrieval of CH and GSV with ALOS PALSAR and Landsat data when using stand-level CH and GSV estimates from ALS as surrogate reference for model development
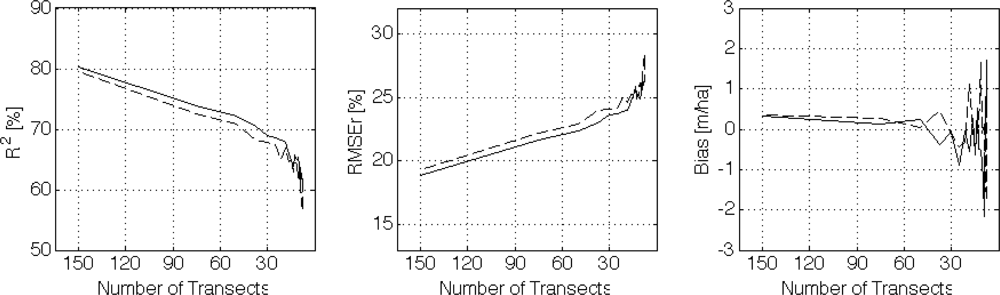
- the required ALS sampling density (in form of the number of transects that are flown)
2. Study Area, Data and Methods
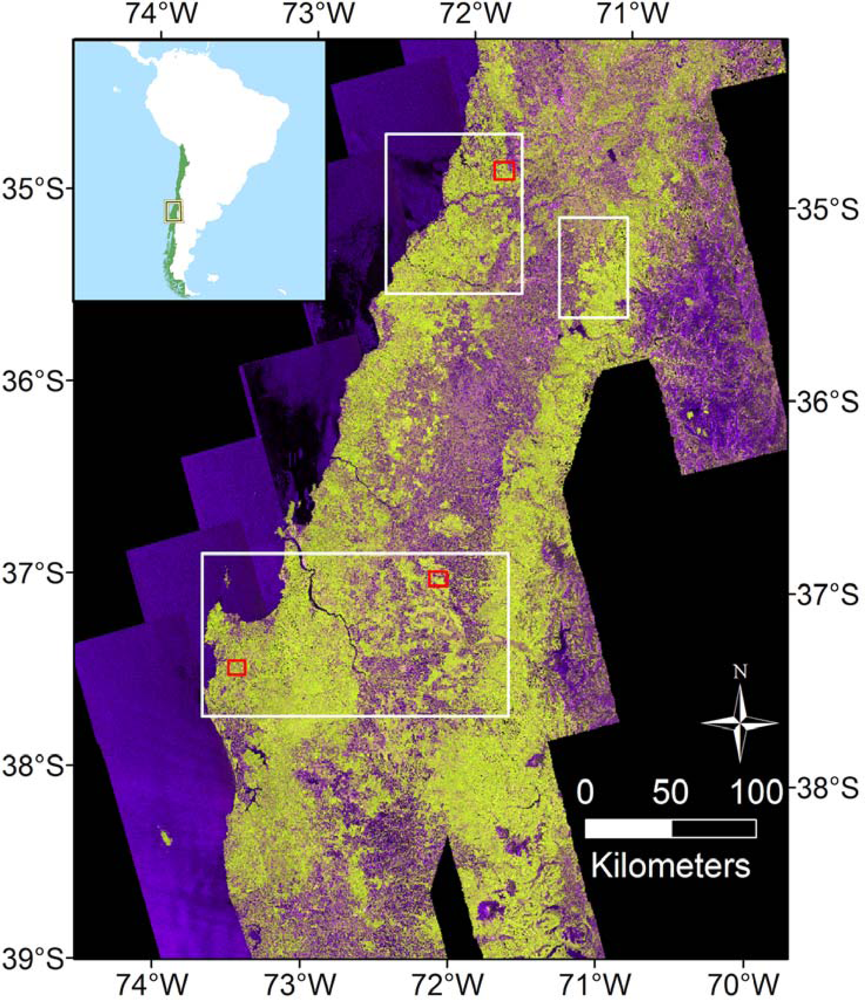
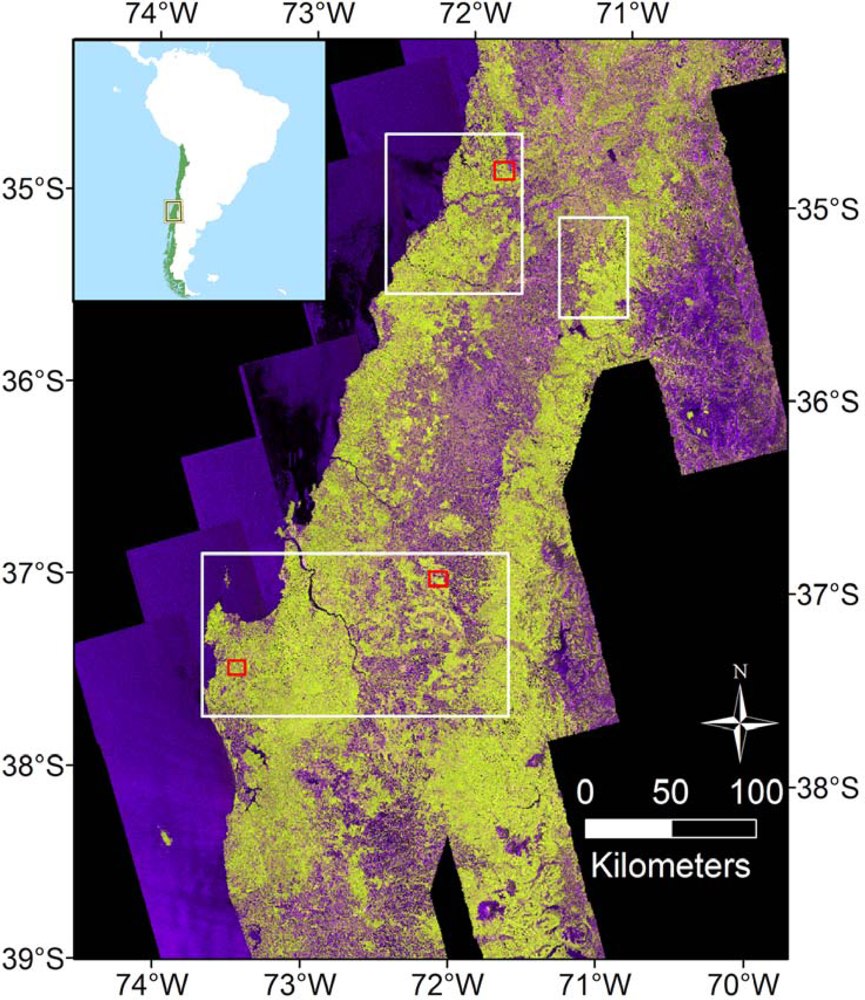
2.1. Study Area and Field Data
2.2. Data
2.2.1. ALOS PALSAR
2.2.2. Airborne Laser Scanner Data
2.2.3. Landsat ETM+
2.2.4. Weather Data
2.3. Data Preparation
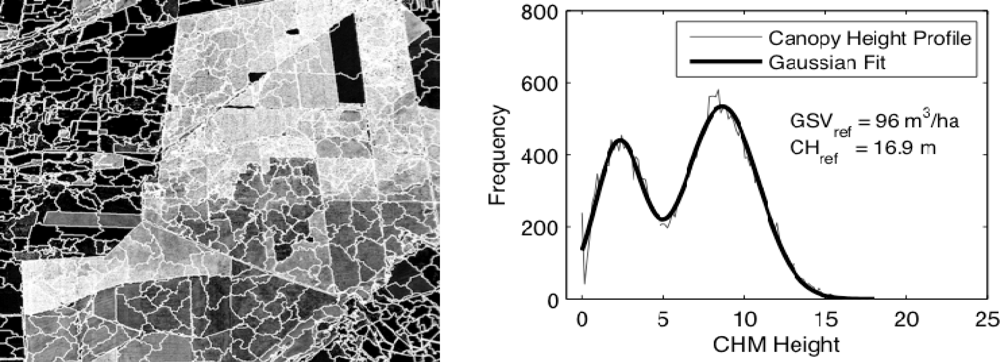
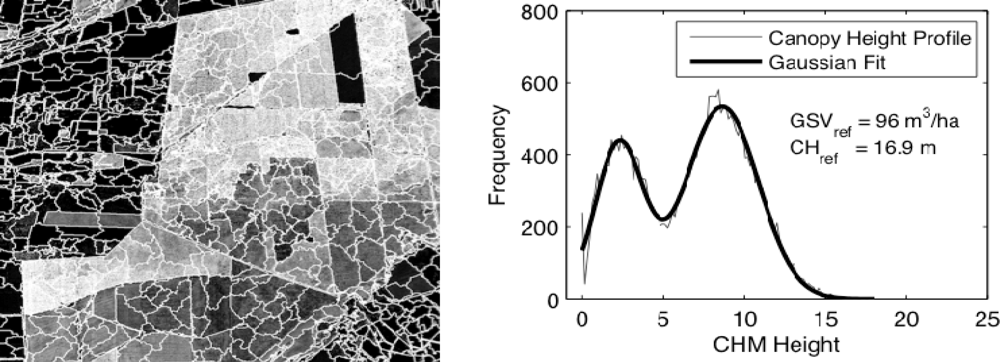
2.3.1. Stand-Level Canopy Structure Indices
2.3.2. Segmentation
2.4. Modeling
2.5. Layout and Spatial Scale of Fusion Experiments
2.5.1. Test Sites
2.5.2. Extrapolation to Entire PALSAR Frames
3 Results and Discussion
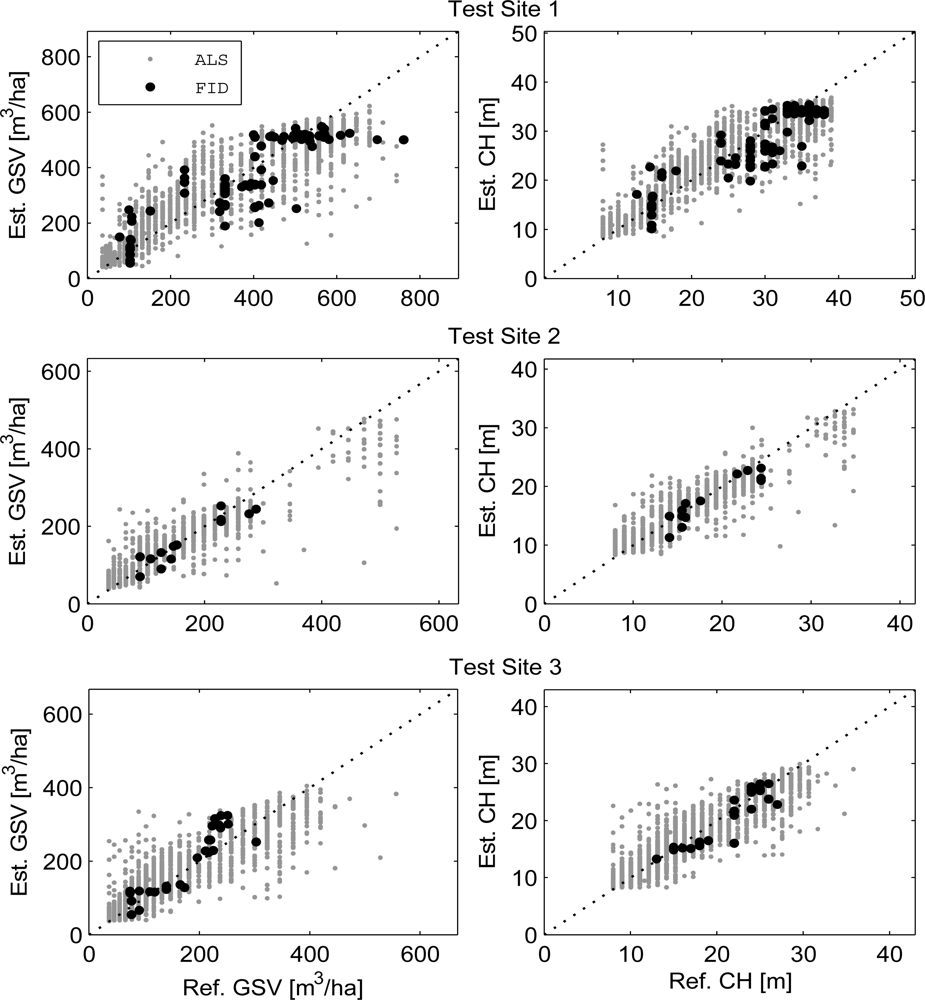
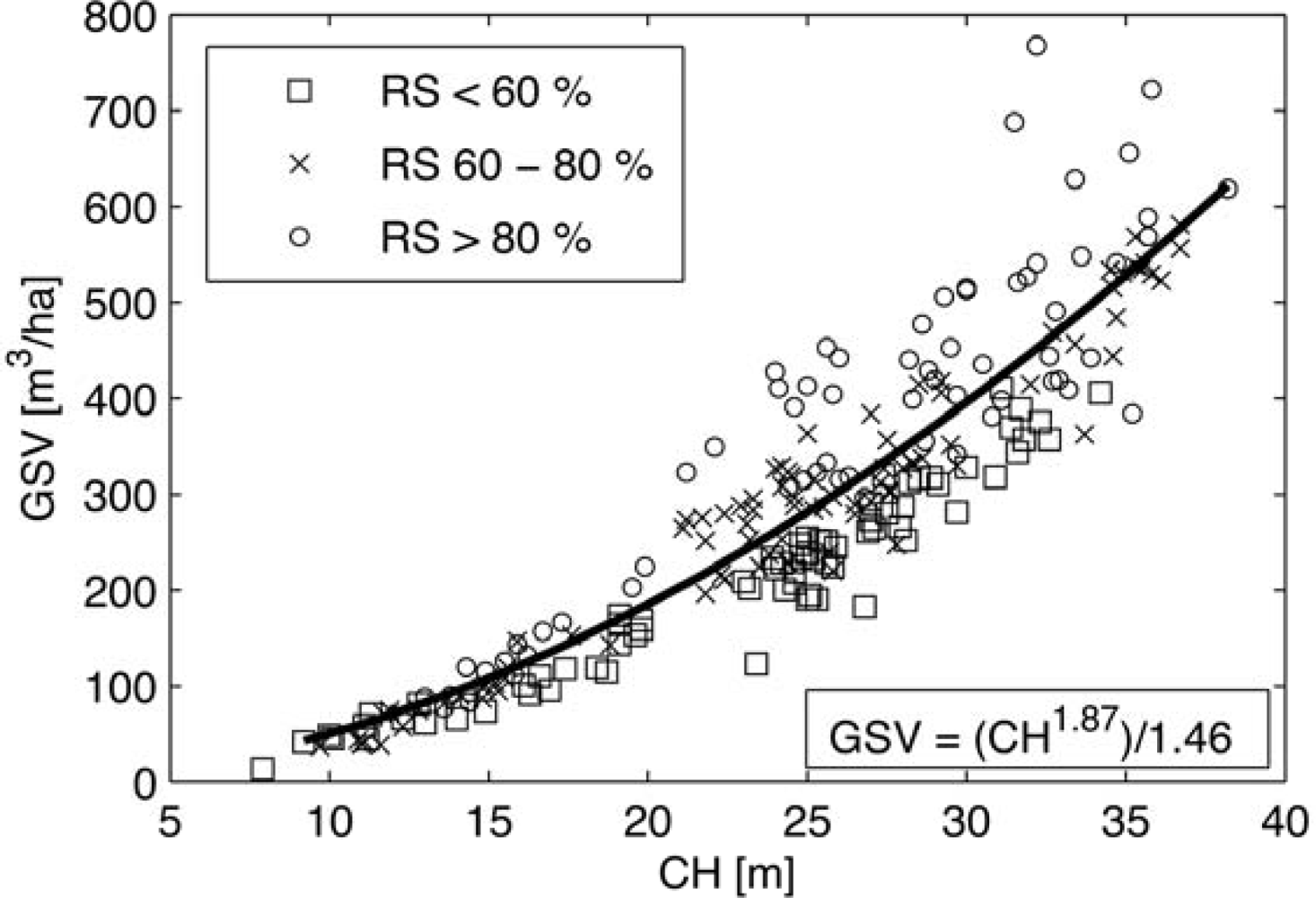
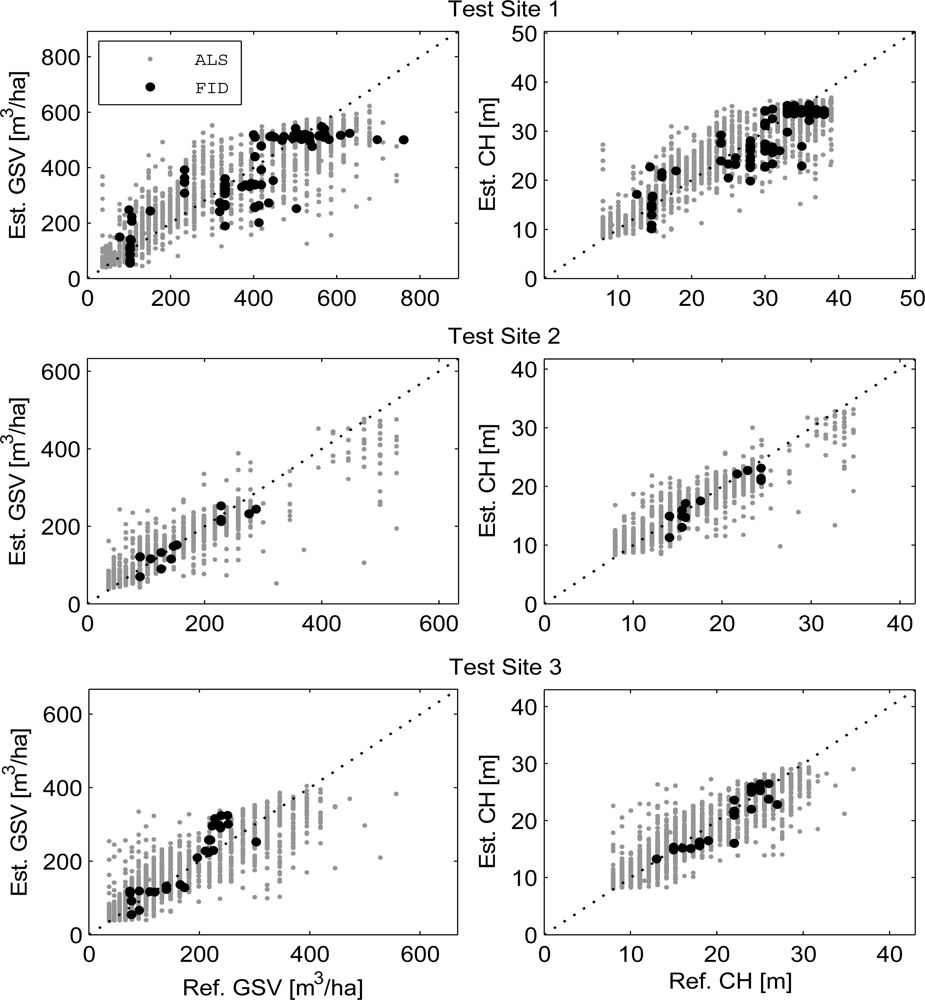
3.1. Stand-Level Retrieval of CH and GSV with ALS
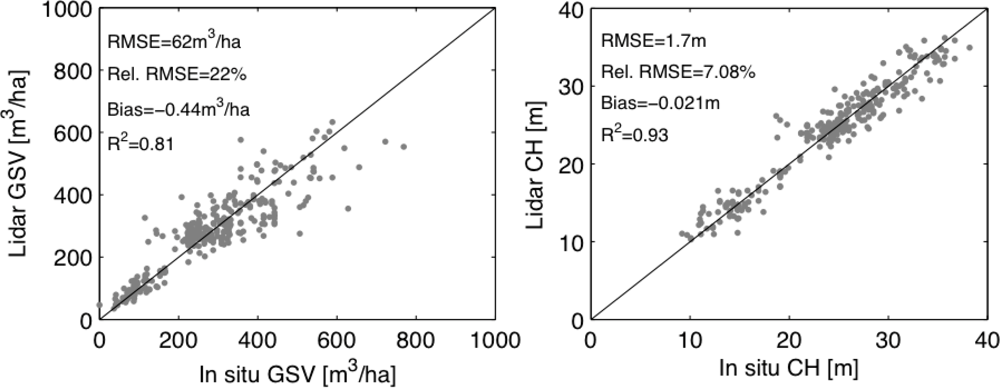
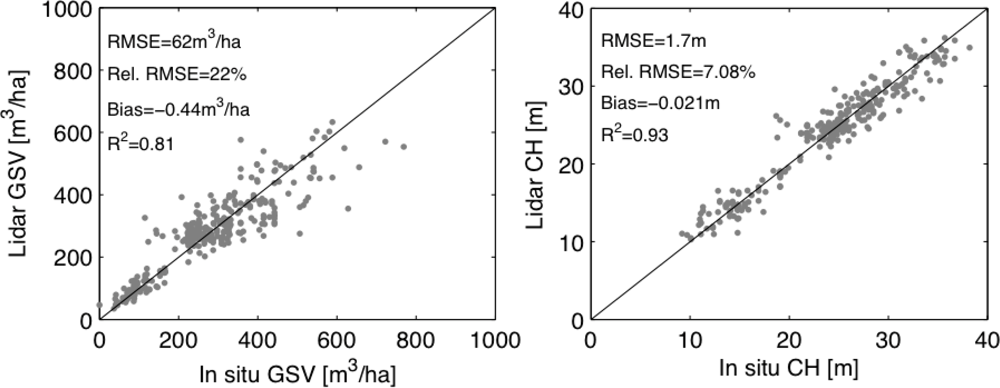
3.1.1. Retrieval Accuracy
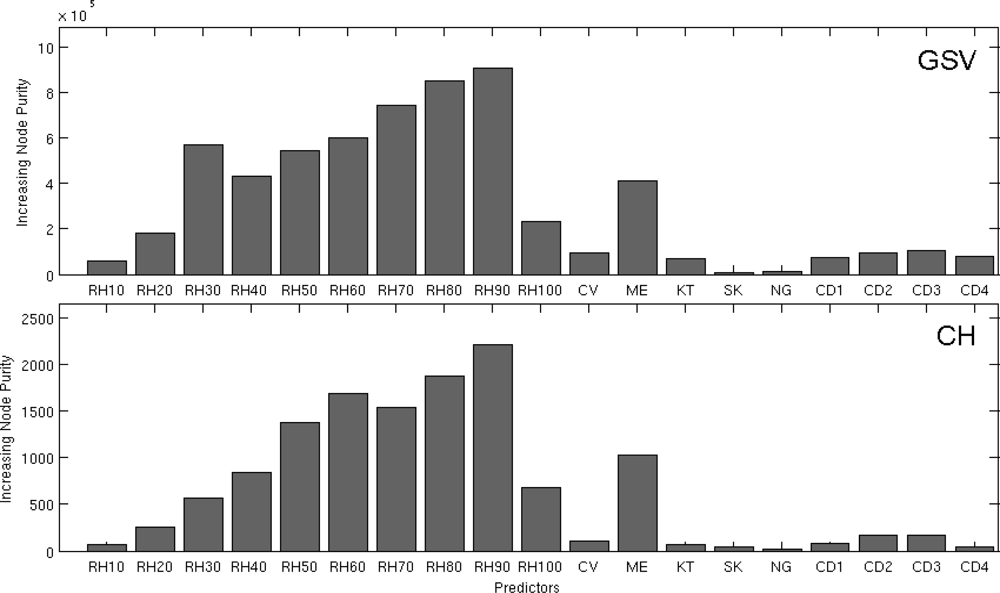
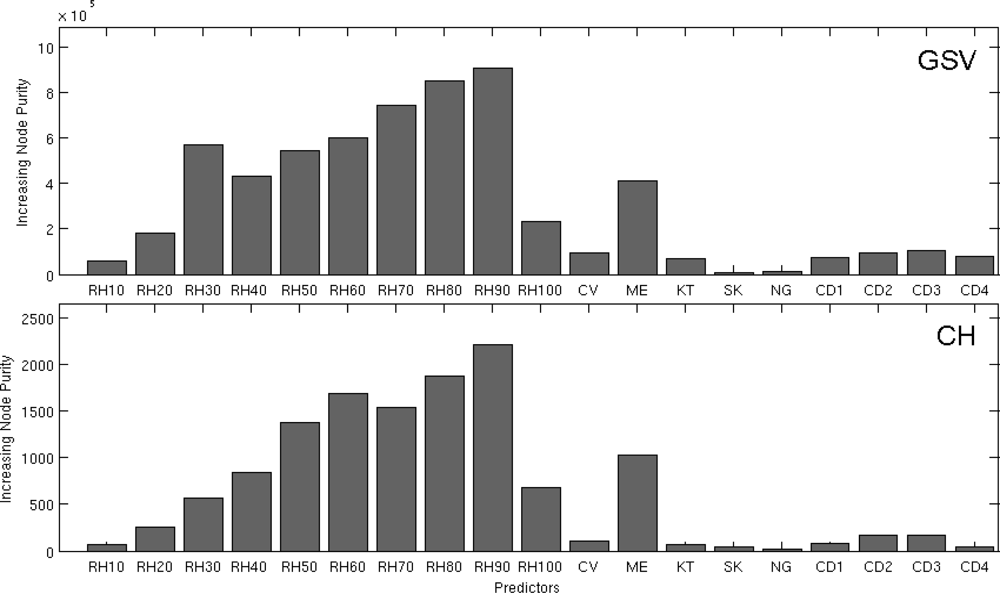
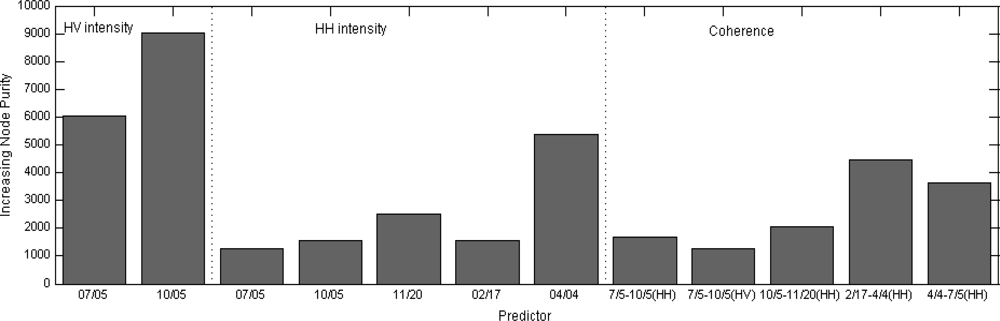
3.1.2. Information Content of the ALS Canopy Structure Indices
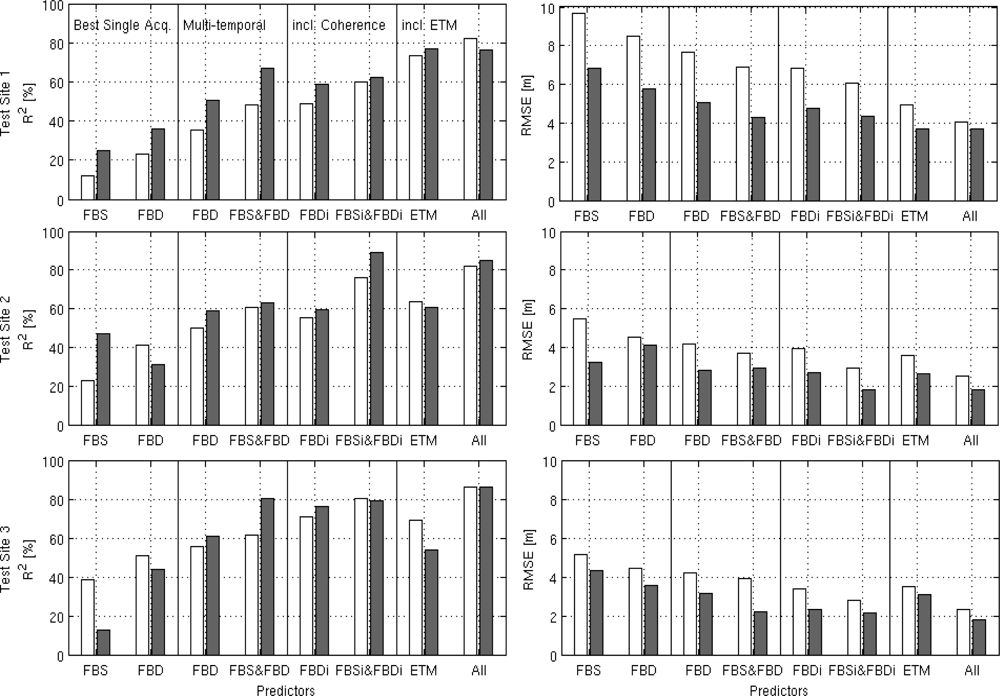
3.2. CH and GSV Retrieval through Synergy of ALS, PALSAR & Landsat
3.2.1. Retrieval with All Spaceborne L-Band SAR/InSAR and Optical Images
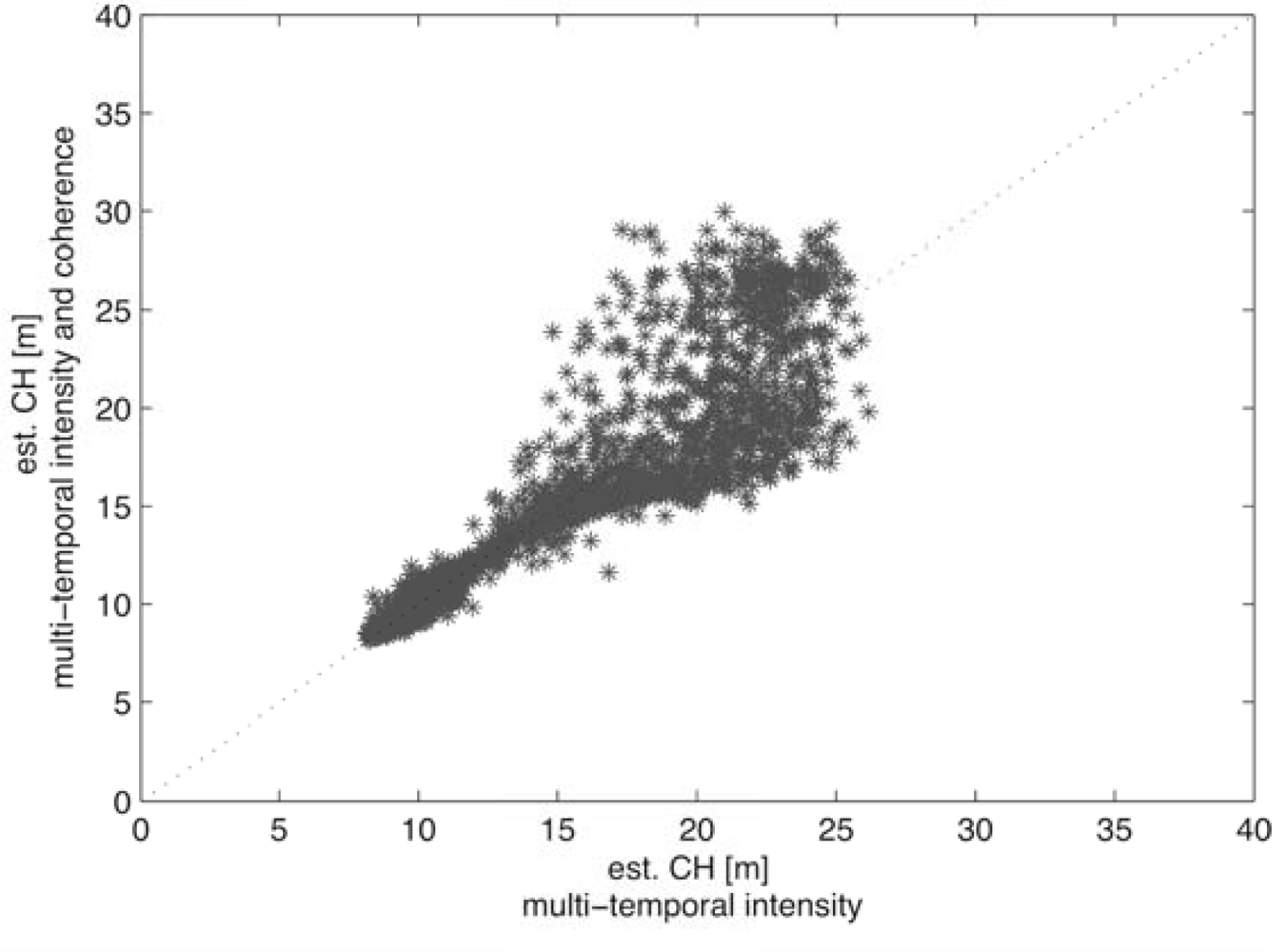
3.2.2. Benefit of the Fusion of Multi-Temporal L-Band SAR/InSAR and Landsat Data
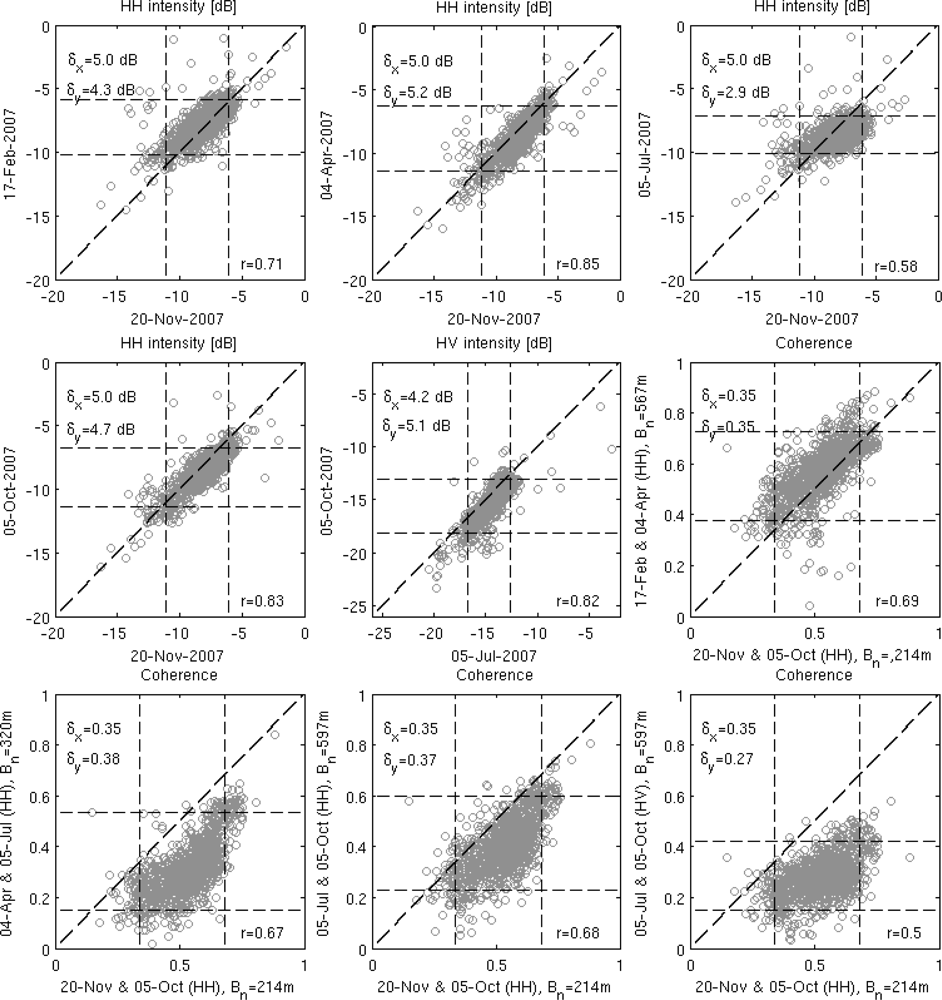
3.2.3. Contribution of SAR, InSAR and Optical Datasets
3.3. Extrapolation to ALOS PALSAR Frames
4. Conclusions
Acknowledgments
References
- Lefsky, M.; Harding, D.; Cohen, W.B.; Parker, G.; Shugart, H. Surface lidar remote sensing of Basal area and biomass in deciduous forests of Eastern Maryland, USA. Remote Sens. Environ 1999, 67, 83–98. [Google Scholar]
- Lefsky, M.; Cohen, W.B.; Parker, G.; Harding, D. Lidar remote sensing for ecosystem studies. BioScience 2002, 52, 19–30. [Google Scholar]
- Means, J.E.; Acker, S.A.; Harding, D.J.; Blair, J.B.; Lefsky, M.A.; Cohen, W.B.; Harmon, M.E.; McKee, W.A. Use of large-footprint scanning airborne lidar to estimate forest stand characteristics in the Western Cascades of Oregon. Remote Sens. Environ 1999, 67, 298–308. [Google Scholar]
- Drake, J.B.; Dubayah, R.; Knox, R.; Clark, D.B.; Blair, J. Sensitivity of large-footprint lidar to canopy structure and biomass in a neotropical rainforest. Remote Sens. Environ 2002, 81, 378–392. [Google Scholar]
- Anderson, J.; Martin, M.; Smith, M.; Dubayah, R.; Hofton, M.; Hyde, P.; Peterson, B.; Blair, J.; Knox, R. The use of waveform lidar to measure northern temperate mixed conifer and deciduous forest structure in New Hampshire. Remote Sens. Environ 2006, 105, 248–261. [Google Scholar]
- Bergen, K.; Goetz, S.; Dubayah, R.; Henebry, G.M.; Hunsaker, C.T.; Imhoff, M.L.; Nelson, R.; Parker, G.G.; Radeloff, V.C. Remote sensing of vegetation 3-D structure for biodiversity and habitat: Review and implications for lidar and radar spaceborne missions. J. Geophys. Res. 2009, 114, G00E06,. 1–13. [Google Scholar]
- Lefsky, M.; Ramond, T.; Weimer, C.S. Alternate spatial sampling approaches for ecosystem structure inventory using spaceborne lidar. Remote Sens. Environ 2011, 115, 1361–1368. [Google Scholar]
- Wulder, M.A.; White, J.; Nelson, R.; Næsset, E.; Ørka, H.O.; Coops, N.C.; Hilker, T.; Bater, C.W.; Gobakken, T. Lidar sampling for large-area forest characterization: A review. Remote Sens. Environ 2012, 121, 196–209. [Google Scholar]
- Boudreau, J.; Nelson, R.; Margolis, H.; Beaudoin, A.; Guindon, L.; Kimes, D. Regional aboveground forest biomass using airborne and spaceborne LiDAR in Québec. Remote Sens. Environ 2008, 112, 3876–3890. [Google Scholar]
- Nelson, R.; Ranson, K.J.; Sun, G.; Kimes, D.; Kharuk, V.; Montesano, P.M. Estimating Siberian timber volume using MODIS and ICESat/GLAS. Remote Sens. Environ 2009, 113, 691–701. [Google Scholar]
- Lefsky, M.A. A global forest canopy height map from the Moderate Resolution Imaging Spectroradiometer and the Geoscience Laser Altimeter System. Geophys. Res. Lett 2010, 37, 1–5. [Google Scholar]
- Saatchi, S.S.; Harris, N.; Brown, S.; Lefsky, M.; Mitchard, E.T.; Salas, W.; Zutta, B.R.; Buerman, W.; Lewsi, S.L.; Hagen, S.; Petrova, S.; White, L.; Silman, M.; Morel, A. Benchmark map of forest carbon stocks in tropical regions across three continents. Proc. Natl. Amer. Sci 2011, 108, 9899–9904. [Google Scholar]
- Simard, M.; Pinto, N.; Fisher, J.B.; Baccini, A. Mapping forest canopy height globally with spaceborne lidar. J. Geophys. Res 2011, 116, 1–12. [Google Scholar]
- Baccini, A.; Goetz, S.; Walker, W.S.; Laporte, N.; Sun, M.; Sulla-Menashe, D.; Hackler, J.; Beck, P.S.A.; Dubayah, R.; Friedl, M.A.; Samanta, S.; Houghton, R.A. Estimated carbon dioxide emissions from tropical deforestation improved by carbon-density maps. Nature Clim. Change 2012, 2, 1–4. [Google Scholar]
- Wulder, M.A.; Seemann, D. Forest inventory height update through the integration of LIDAR data with segmented Landsat imagery. Can. J. Remote Sens 2003, 29, 536–543. [Google Scholar]
- Hudak, A.; Lefsky, M.; Cohen, W.B.; Berterretche, M. Integration of lidar and Landsat ETM+ data for estimating and mapping forest canopy height. Remote Sens. Environ 2002, 82, 397–416. [Google Scholar]
- Kellndorfer, J.; Walker, W.; LaPoint, E.; Kirsch, K.; Bishop, J.; Fiske, G. Statistical fusion of lidar, InSAR, and optical remote sensing data for forest stand height characterization: A regional-scale method based on LVIS, SRTM, Landsat ETM+, and ancillary data sets. J. Geophys. Res. 2010, 115, G00E08,. 1–10. [Google Scholar]
- Englhart, S.; Keuck, V.; Siegert, F. Aboveground biomass retrieval in tropical forests—The potential of combined X- and L-band SAR data use. Remote Sens. Environ 2011, 115, 1260–1271. [Google Scholar]
- Sun, G.; Ranson, K.J.; Guo, Z.; Zhang, Z.; Montesano, P.; Kimes, D. Forest biomass mapping from lidar and radar synergies. Remote Sens. Environ 2011, 115, 2906–2916. [Google Scholar]
- He, Q.S.; Cao, C.H.; Chen, E.; Sun, G.Q.; Ling, F.L.; Pang, Y.; Zhang, H.; Ni, W.J.; Xu, M.; Li, Z.; Li, X.W. Forest stand biomass estimation using ALOS PALSAR data based on LiDAR-derived prior knowledge in the Qilian Mountain, western China. Int. J. Remote Sens 2012, 33, 710–729. [Google Scholar]
- Magnussen, S.; Boudewyn, P. Derivations of stand heights from airborne laser scanner data with canopy-based quantile estimators. Can. J. For. Res 1998, 28, 1016–1031. [Google Scholar]
- Means, J.E.; Acker, S.A.; Fltt, B.J.; Renslow, M.; Hendrix, C.J. Predicting forest stand characteristics with Airborne Scanning Lidar. Photogramm. Eng. Remote Sensing 2000, 66, 1367–1371. [Google Scholar]
- Van Aardt, J.A.N.; Wynne, R.H.; Oderwald, R.G. Lidar-distributional parameters on a per-segment basis. For. Sci 2006, 52, 636–649. [Google Scholar]
- Næsset, E. Predicting forest stand characteristics with airborne scanning laser using a practical two-stage procedure and field data. Remote Sens. Environ 2002, 80, 88–99. [Google Scholar]
- Næsset, E.; Gobakken, T. Estimation of above- and below-ground biomass across regions of the boreal forest zone using airborne laser. Remote Sens. Environ 2008, 112, 3079–3090. [Google Scholar]
- Nord-Larsen, T.; Schumacher, J. Estimation of forest resources from a country wide laser scanning survey and national forest inventory data. Remote Sens. Environ 2012, 119, 148–157. [Google Scholar]
- Lindberg, E.; Hollaus, M. Comparison of methods for estimation of stem volume, stem number and basal area from airborne laser scanning data in a hemi-boreal forest. Remote Sens 2012, 4, 1004–1023. [Google Scholar]
- Asner, G.P.; Powell, G.; Mascaro, J.; Knapp, D.E.; Clark, J.K.; Jacobson, J.; Kennedy-Bowdoin, T.; Balaji, A.; Paez-Acosta, G.; Victoria, E.; Secada, L.; Valqui, M.; Hughes, R.F. High-resolution forest carbon stocks and emissions in the Amazon. PNAS 2010, 107, 16738–16742. [Google Scholar]
- Rosenqvist, A.; Shimada, M.; Ito, N.; Watanabe, M. ALOS PALSAR: A pathfinder mission for global-scale monitoring of the environment. IEEE Trans. Geosci. Remote Sens 2007, 45, 3307–3316. [Google Scholar]
- Kurvonen, L.; Pulliainen, J.T.; Hallikainen, M.T. Retrieval of biomass in boreal forests from multitemporal ERS-1 and JERS-1 SAR images. IEEE Trans. Geosci. Remote Sens 1999, 37, 198–205. [Google Scholar]
- Askne, J.I.H.; Santoro, M.; Smith, G.; Fransson, J.E.S. Multitemporal repeat-pass SAR interferometry of boreal forests. IEEE Trans. Geosci. Remote Sens 2003, 41, 1540–1550. [Google Scholar]
- Rauste, Y. Multi-temporal JERS SAR data in boreal forest biomass mapping. Remote Sens. Environ 2005, 97, 263–275. [Google Scholar]
- Santoro, M.; Eriksson, L.E.B.; Askne, J.I.H.; Schmullius, C.C. Assessment of stand-wise stem volume retrieval in boreal forest from JERS-1 L-band SAR backscatter. Int. J. Remote Sens 2006, 27, 3425–3454. [Google Scholar]
- Santoro, M.; Beer, C.; Cartus, O.; Schmullius, C.C.; Shvidenko, A.; McCallum, I.; Wegmüller, U.; Wiesmann, A. Retrieval of growing stock volume in boreal forest using hyper-temporal series of Envisat ASAR ScanSAR backscatter measurements. Remote Sens. Environ 2011, 115, 490–507. [Google Scholar]
- Cartus, O.; Santoro, M.; Kellndorfer, J. Mapping of forest aboveground biomass in the northeastern United States with ALOS PALSAR dual-polarization L-Band. Remote Sens. Environ 2012, 124, 466–478. [Google Scholar]
- Eriksson, L.E.B.; Santoro, M.; Wiesmann, A.; Schmullius, C.C. Multitemporal JERS repeat-pass coherence for growing-stock volume estimation of Siberian forest. IEEE Trans. Geosci. Remote Sens 2003, 41, 1561–1570. [Google Scholar]
- Simard, M.; Hensley, S.; Lavalle, M.; Dubayah, R.; Pinto, N.; Hofton, M. An empirical assessment of temporal decorrelation using the uninhabited aerial vehicle synthetic aperture radar over forested landscapes. Remote Sens 2012, 4, 975–986. [Google Scholar]
- Tsui, W.O.; Coops, N.C.; Wulder, M.A.; Marshall, P.L.; McCardle, A. Using multi-frequency radar and discrete-return LiDAR measurements to estimate above-ground biomass and biomass components in a coastal temperate forest. ISPRS J. Photogramm 2012, 69, 121–133. [Google Scholar]
- Rignot, E.; Salas, W.; Skole, D. Mapping deforestation and secondary growth in Rondonia, Brazil, using imaging radar and thematic mapper data. Remote Sens. Environ 1997, 59, 167–179. [Google Scholar]
- Moghaddam, M.; Dungan, J.; Acker, S. Forest variable estimation from fusion of SAR and multispectral optical data. IEEE Trans. Geosci. Remote Sens 2002, 40, 2176–2187. [Google Scholar]
- Walker, W.; Kellndorfer, J.M.; Lapoint, E.; Hoppus, M.; Westfall, J. An empirical InSAR-optical fusion approach to mapping vegetation canopy height. Remote Sens. Environ 2007, 109, 482–499. [Google Scholar]
- Chen, W.; Blain, D.; Li, J.; Keohler, K.; Fraser, R.; Zhang, Y.; Leblanc, S.; Olthof, I.; Wang, J.; McGovern, M. Remote Biomass measurements and relationships with Landsat-7/ETM+ and JERS-1/SAR data over Canada’ s western sub-arctic and low arctic. Int. J. Remote Sens 2009, 30, 2355–2376. [Google Scholar]
- Breiman, L. Random forests. Mach. Learn 2001, 45, 5–23. [Google Scholar]
- Houghton, R.; Butman, D.; Bunn, A.G.; Krankina, O.N.; Schlesinger, P.; Stone, T.A. Mapping Russian forest biomass with data from satellites and forest inventories. Environ. Res. Lett 2007, 2, 45032. [Google Scholar]
- Avitabile, V.; Baccini, A.; Friedl, M.A.; Schmullius, C.C. Capabilities and limitations of Landsat and land cover data for aboveground woody biomass estimation of Uganda. Remote Sens. Environ 2012, 117, 366–380. [Google Scholar]
- Toro, J.; Gessel, S. Radiata pine plantations in Chile. New Forests 1999, 18, 33–44. [Google Scholar]
- Shimada, M.; Isoguchi, O.; Tadono, T.; Isono, K. PALSAR radiometric and geometric calibration. IEEE Trans. Geosci. Remote Sens 2009, 47, 3915–3932. [Google Scholar]
- Small, D. Flattening Gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosc. Remote Sens 2011, 49, 3081–3093. [Google Scholar]
- Castel, T.; Beaudoin, A.; Stach, N.; Stussi, N.; Le Toan, T.; Durand, P. Sensitivity of space-borne SAR data to forest parameters over sloping terrain. Theory and experiment. Int. J. Remote Sens 2001, 22, 2351–2376. [Google Scholar]
- Lopes, A.; Nezry, E.; Touzi, R.; Laur, H. Structure detection and statistical adaptive speckle filtering in SAR images. Int. J. Remote Sens 1993, 14, 1735–1758. [Google Scholar]
- Werner, C.; Wegmüller, U.; Strozzi, T.; Wiesmann, A.; Santoro, M. PALSAR Multi-Mode Interferometric Processing. Proceedings of the First Joint PI Symposium of ALOS Data Nodes for ALOS Science Program, Kyoto, Japan, 19–23 November 2007; pp. 19–23.
- Santoro, M.; Werner, C.; Wegmüller, U.; Cartus, O. Improvement of Interferometric SAR Coherence Estimates by Slope-Adaptive Range Common-Band Filtering. Proceedings of the IEEE 2007 International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 129–132.
- Masek, J.G.; Vermote, E.F.; Saleous, N.E.; Wolfe, R.; Hall, F.G.; Huemmrich, K.F.; Feng, G.; Kutler, J; Teng-Kui, L. A Landsat surface reflectance dataset for North America, 1990–2000. IEEE Geosci. Remote Sens. Lett 2006, 3, 68–72. [Google Scholar]
- Næsset, E.; Gobakken, T. Estimating forest growth using canopy metrics derived from airborne laser scanner data. Remote Sens. Environ 2005, 96, 453–465. [Google Scholar]
- Hofton, M.A.; Minster, J.B.; Blair, J.B. Decomposition of laser altimeter waveforms. IEEE Trans. Geosci. Remote Sens 2000, 38, 1989–1996. [Google Scholar]
- Liaw, A.; Wierner, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Baccini, A.; Laporte, N.; Goetz, S.; Sun, M.; Dong, H. A first map of tropical Africa’s above-ground biomass derived from satellite imagery. Environ. Res. Lett 2008, 3, 045011. [Google Scholar]
- Cohen, W.B.; Maiersperger, T.K.; Gower, S.T.; Turner, D.P. An improved strategy for regression of biophysical variables and Landsat ETM+ data. Remote Sens. Environ 2003, 84, 561–571. [Google Scholar]
- Lefsky, M.; Hudak, A.; Cohen, W.B.; Acker, S. Patterns of covariance between forest stand and canopy structure in the Pacific Northwest. Remote Sens. Environ 2005, 95, 517–531. [Google Scholar]
- Santoro, M.; Shvidenko, A.; McCallum, I.; Askne, J.I.H.; Schmullius, C.C. Properties of ERS-1/2 coherence in the Siberian boreal forest and implications for stem volume retrieval. Remote Sens. Environ 2007, 106, 154–172. [Google Scholar]
- Gobakken, T.; Næsset, E.; Nelson, R.; Bollandsås, O.M.; Gregoire, T.G.; Ståhl, G.; Holm, S.; Ørka, H.O.; Astrup, R. Estimating biomass in Hedmark County, Norway using national forest inventory field plots and airborne laser scanning. Remote Sens. Environ 2012, 123, 443–456. [Google Scholar]
- Santoro, M.; Fransson, J.E.S.; Eriksson, L.E.B.; Magnusson, M.; Ulander, L.M.H.; Olsson, H. Signatures of ALOS PALSAR L-band backscatter in Swedish forest. IEEE Trans. Geosci. Remote Sens 2009, 47, 4001–4019. [Google Scholar]
- Sandberg, G.; Ulander, L.M.H.; Fransson, J.E.S.; Holmgren, J.; Le Toan, T. L- and P-band backscatter intensity for biomass retrieval in hemiboreal forest. Remote Sens. Environ 2011, 115, 2874–2886. [Google Scholar]
- Zebker, H.A.; Villasenor, J. Decorrelation in interferometric Radar echoes. IEEE Trans. Geosci. Remote Sens 1992, 30, 950–959. [Google Scholar]
- Magnusson, M.; Fransson, J.E.S.; Holmgren, L. Effects on estimation accuracy of forest variables using different pulse density of laser data. For. Sci 2007, 53, 619–626. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean/SD | Range | |
|---|---|---|
| Canopy Height | 24/7 m | 8–39 m |
| Basal Area | 33/10 m2/ha | 13–77 m2/ha |
| Relative Stocking | 70/15% | 26–100% |
| Growing Stock Volume | 276/140 m3/ha | 37–768 m3/ha |
| Stand Size | 6.3/10 ha | 1–120 ha |
| Test Site | Slope (Mean/SD) | CH and GSV (mean/SD) | PALSAR Data | Coherence (Bn) | |
|---|---|---|---|---|---|
| Date | Mode | ||||
| 1 | 16/9° | CHFID: 29/11 m CHALS: 25/9 m GSVFID: 386/198 m3/ha GSVALS: 316/152 m3/ha | 10 Jul. | FBD | 10 Jul. & 10 Oct. (503 m) 10 Oct. & 25 Nov. (304 m) |
| 10 Oct. | FBD | ||||
| 7 Jan. | FBS | ||||
| 25 Nov. | FBS | ||||
| 11 Dec. | FBStc | ||||
| 2 | 2.6/5° | CHFID: 19/4 m CHALS: 17/6 m GSVFID: 172/70 m3/ha GSVALS: 154/98 m3/ha | 5 Jul. | FBDtc | 5 Jul. & 5 Oct. (597 m) 5 Oct. & 20 Nov. (214 m) 17 Feb. & 4 Apr. (567 m) 4 Apr. & 5 Jul. (320 m) |
| 5 Oct. | FBD | ||||
| 17 Feb. | FBStcu | ||||
| 4 Apr. | FBS | ||||
| 20 Nov. | FBS | ||||
| 3 | 6.5/4° | CHFID: 21/3 m | 17 Jul. | FBDtcu | |
| CHALS: 16/6 m | 1 Sep. | FBD | 17 Jul. & 1 Sep. (42 m) | ||
| GSVFID: 172/53 m3/ha | 1 Mar. | FBS | 1 Sep. & 2 Dec. (887 m) | ||
| GSVALS: 144/102 m3/ha | 2 Dec. | FBS | |||
| Test Site | Retrieval Error | ALS | FID | ||
|---|---|---|---|---|---|
| GSV | CH | GSV | CH | ||
| 1 | RMSE | 89.6 | 4.1 | 87.2 | 3.72 |
| RMSEr | 28.3 | 16.5 | 22.6 | 12.9 | |
| R2 | 0.79 | 0.82 | 0.72 | 0.76 | |
| Bias | 0.06 | 0.01 | −15.0 | −0.93 | |
| 2 | RMSE | 43.9 | 2.53 | 25.8 | 1.80 |
| RMSEr | 28.5 | 15.0 | 15.0 | 9.7 | |
| R2 | 0.81 | 0.82 | 0.87 | 0.86 | |
| Bias | 0.37 | 0.1 | −9.4 | −1.0 | |
| 3 | RMSE | 42.6 | 2.4 | 43.8 | 1.8 |
| RMSEr | 29.6 | 15.6 | 25.5 | 8.5 | |
| R2 | 0.83 | 0.86 | 0.87 | 0.86 | |
| Bias | −0.1 | 0.01 | 20 | −0.51 | |
Share and Cite
Cartus, O.; Kellndorfer, J.; Rombach, M.; Walker, W. Mapping Canopy Height and Growing Stock Volume Using Airborne Lidar, ALOS PALSAR and Landsat ETM+. Remote Sens. 2012, 4, 3320-3345. https://doi.org/10.3390/rs4113320
Cartus O, Kellndorfer J, Rombach M, Walker W. Mapping Canopy Height and Growing Stock Volume Using Airborne Lidar, ALOS PALSAR and Landsat ETM+. Remote Sensing. 2012; 4(11):3320-3345. https://doi.org/10.3390/rs4113320
Chicago/Turabian StyleCartus, Oliver, Josef Kellndorfer, Markus Rombach, and Wayne Walker. 2012. "Mapping Canopy Height and Growing Stock Volume Using Airborne Lidar, ALOS PALSAR and Landsat ETM+" Remote Sensing 4, no. 11: 3320-3345. https://doi.org/10.3390/rs4113320