Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data

Abstract
:
1. Introduction
1.1. Overview of Mapping Technologies
1.2. Overview of Methods Related to Extraction of Pole-Like Objects
1.3. Objectives of the Study

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Gyro input range | ±1,000 deg/s |
| Gyro rate bias | 1.0 deg/h |
| Gyro rate scale factor | 150 ppm |
| Angular random walk | 0.125 deg/hr |
| Accelerometer range | ±50 g |
| Accelerometer linearity | 500 ppm |
| Accelerometer scale factor | 300 ppm |
| Accelerometer Bias | 1.0 mg |
2. Material
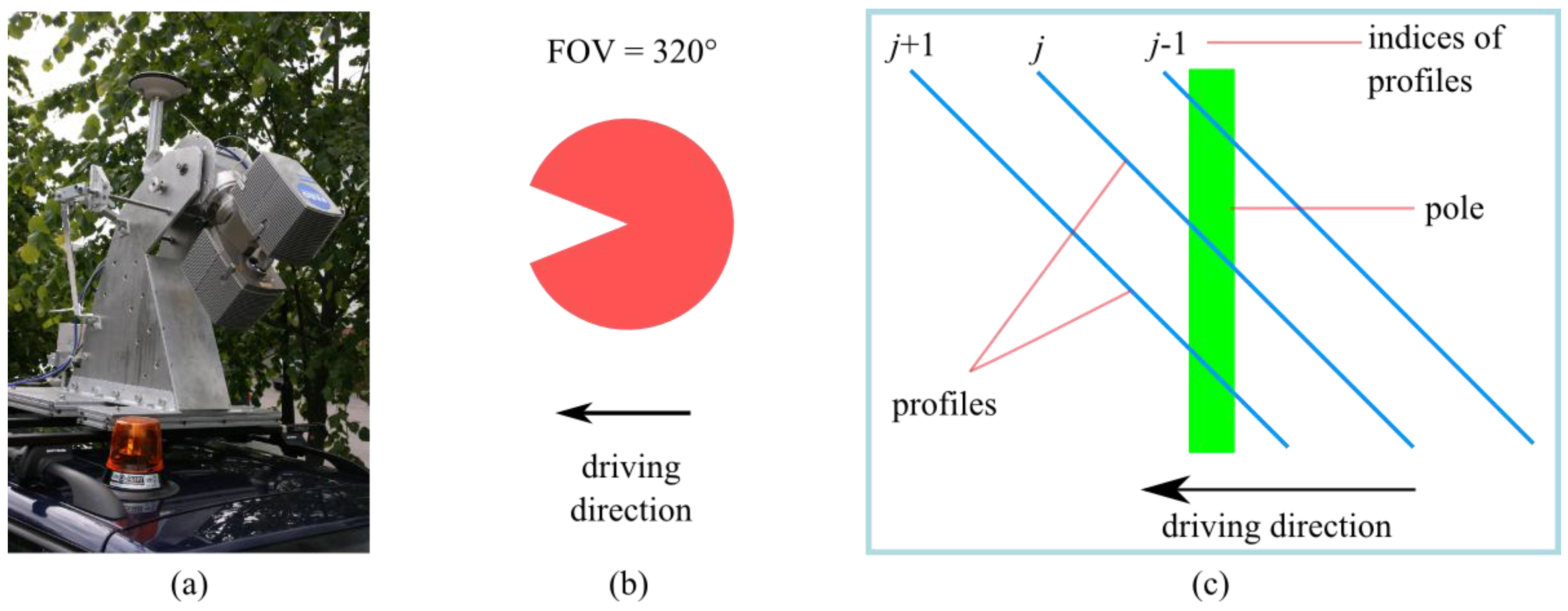
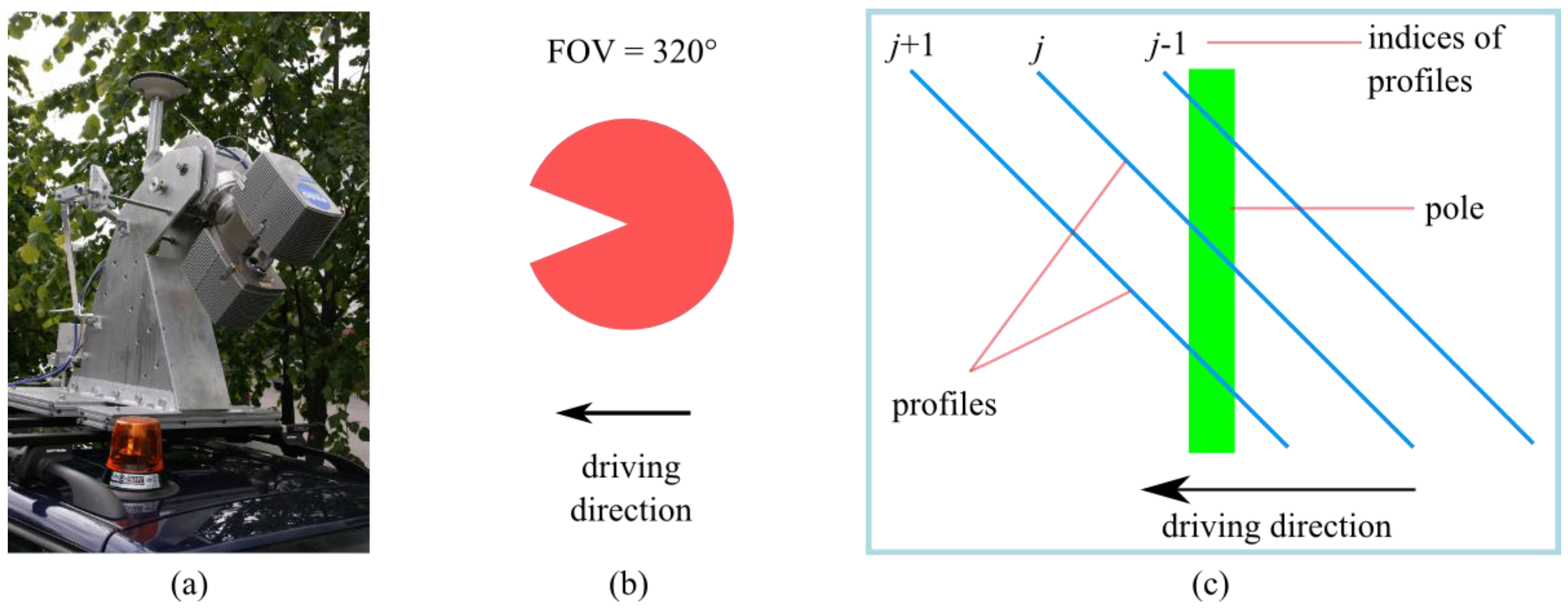
2.1. FGI Roamer
| Property | Value |
|---|---|
| Maximum range | ~76 m |
| Measurement rate | 120 kHz |
| Angular range in scanning plane | 320° |
| Beam divergence | 0.2 mrad, 3 mm at aperture |
| Angular resolution (15 Hz mirror frequency) | 0.045° |
| Ranging error | ±3 mm, linearity e. |
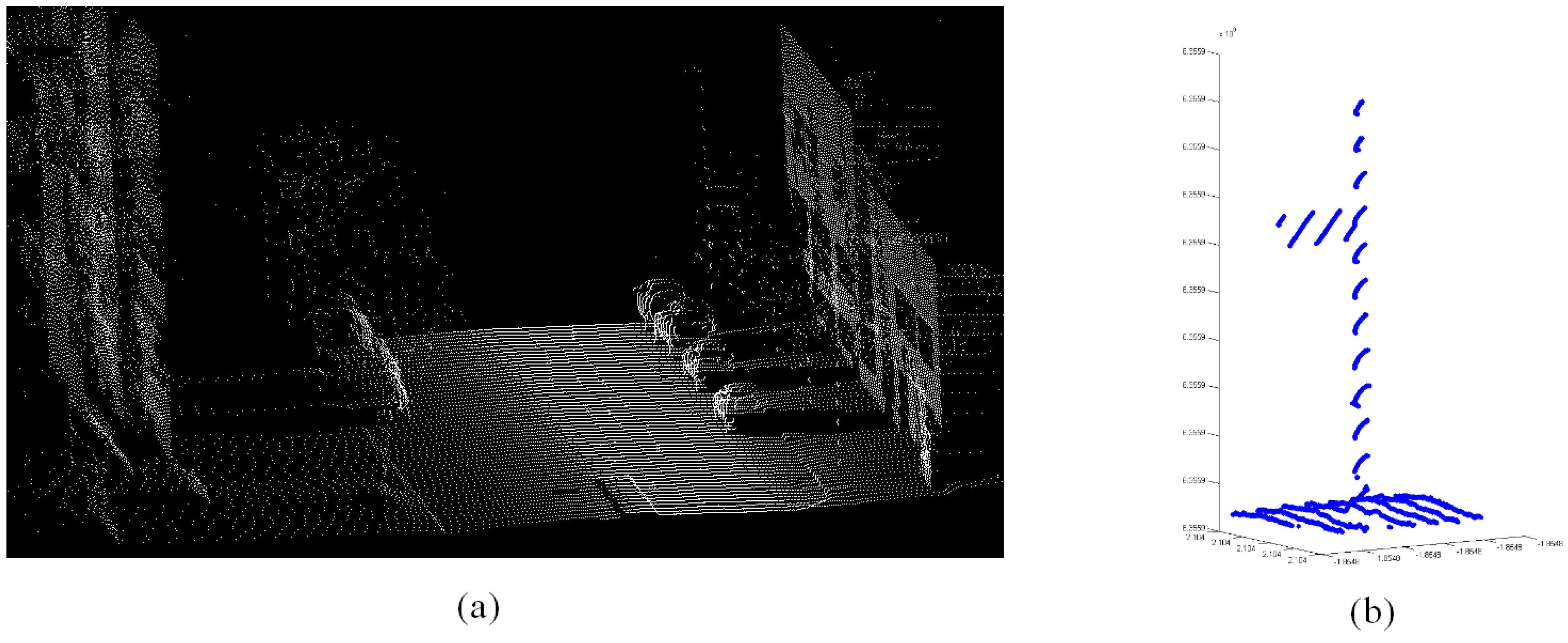
2.2. Test Site and Collection, Pre-Processing and Quality of Data
2.3. Field and Data Reference
3. Developed Method

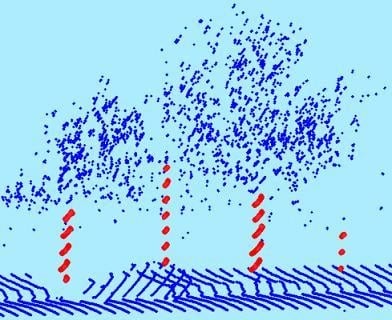
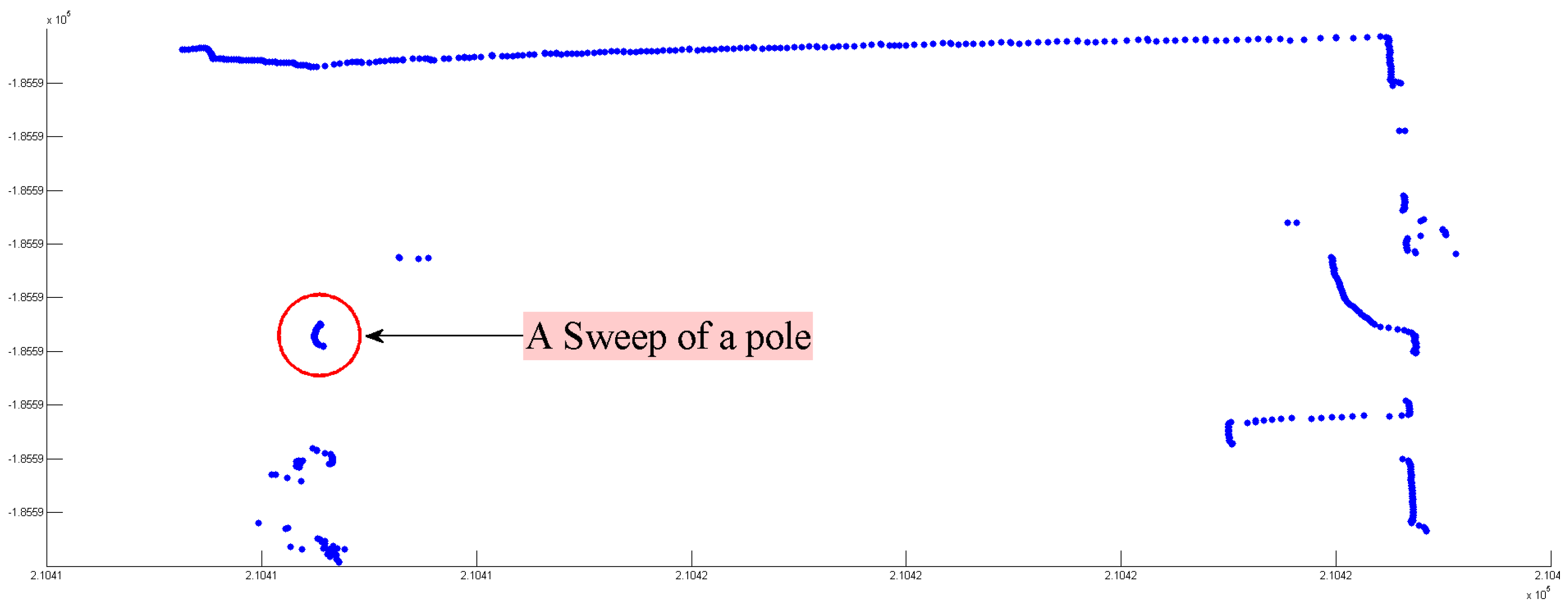
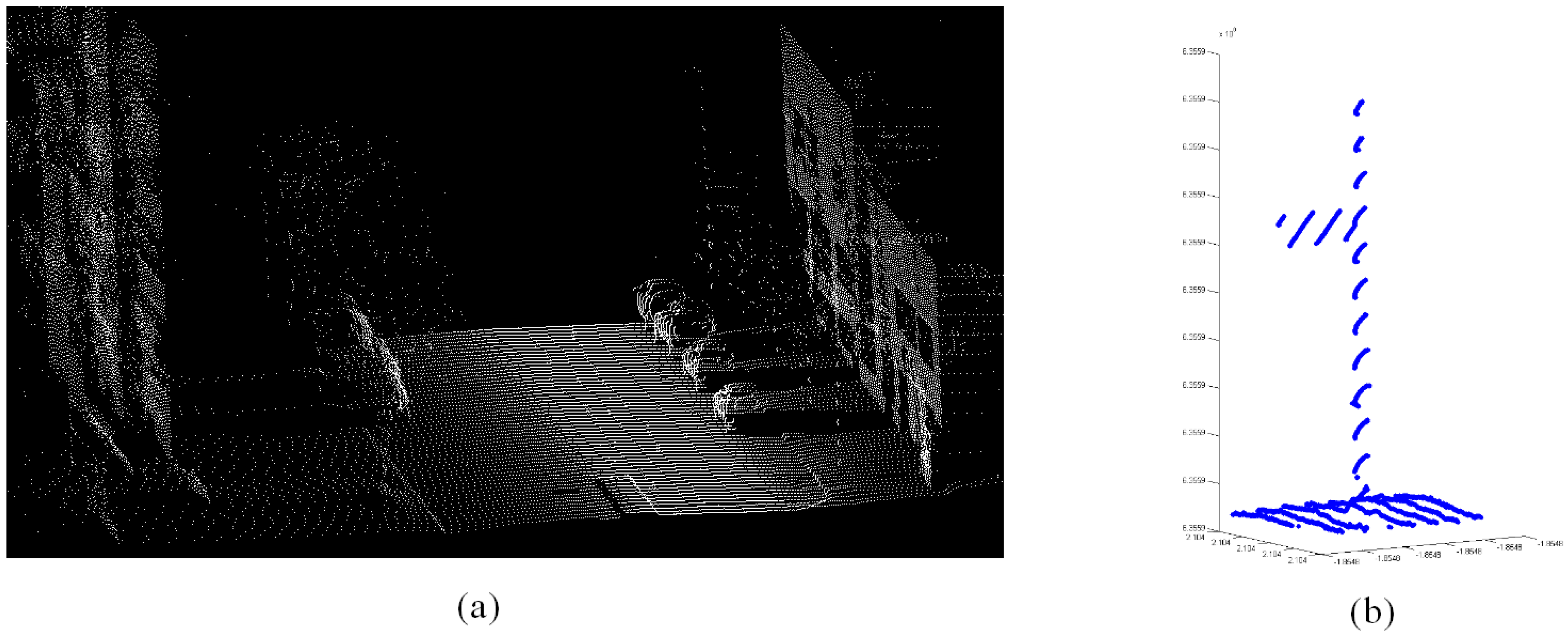
3.1. Scan Line Segmentation

3.2. Clustering
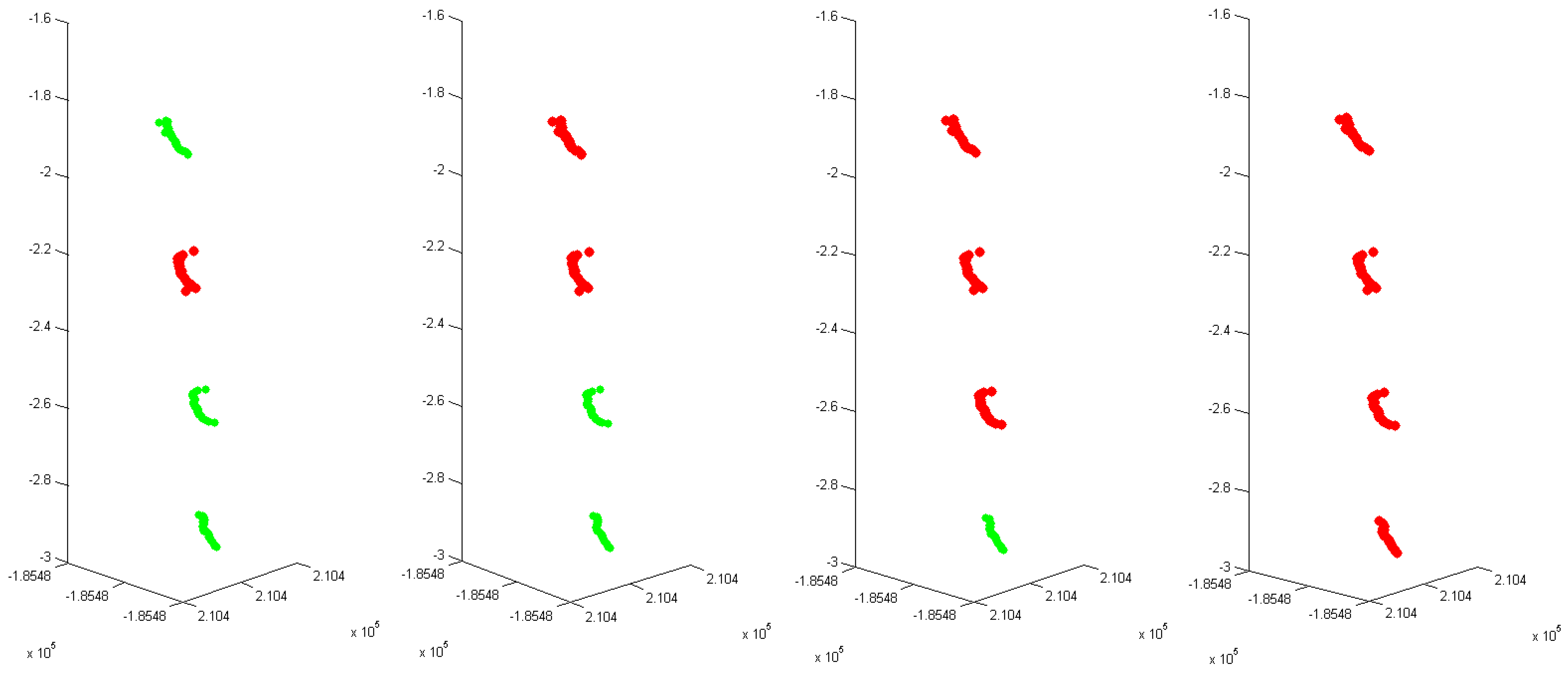
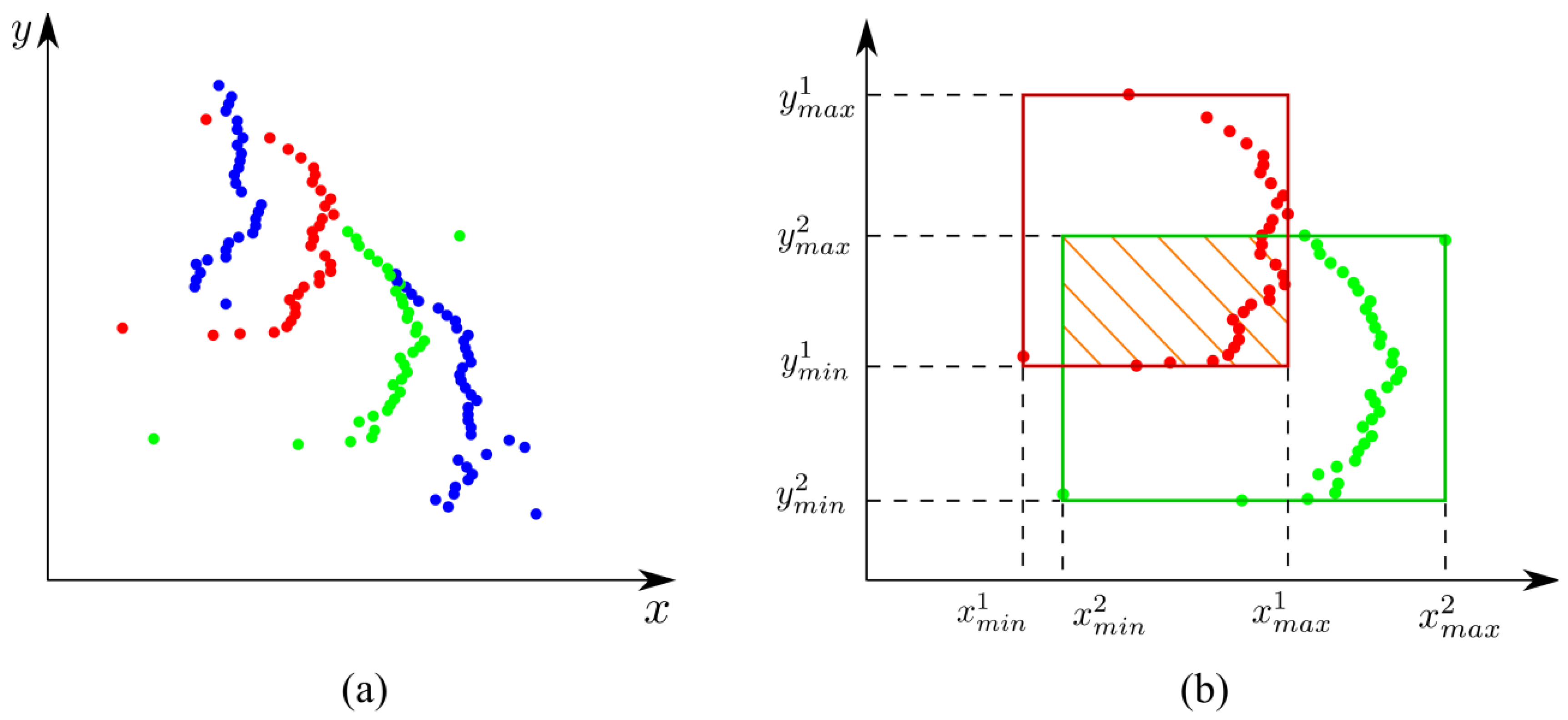
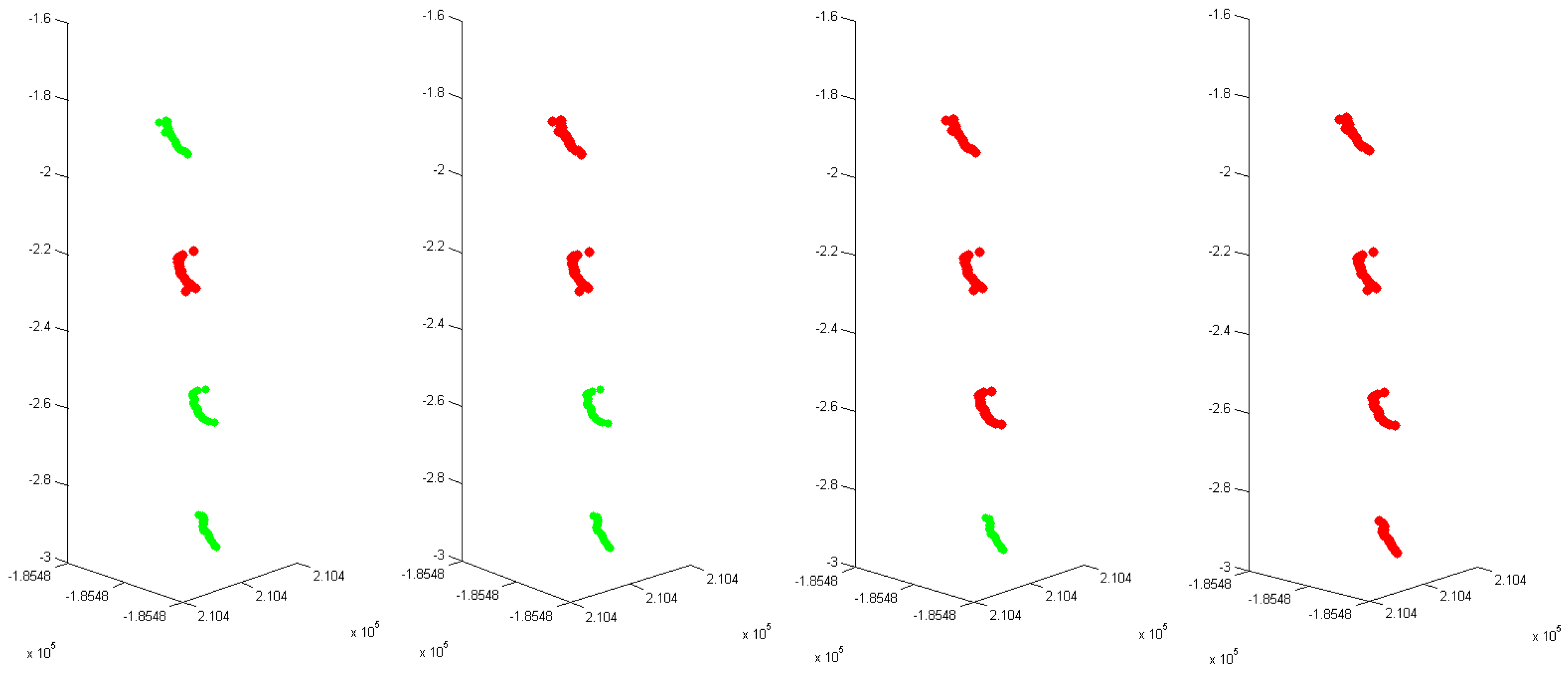
3.3. Merging of Clusters
- (i)
- , where is a small positive constant.
- (ii)
- The distance between the two clusters is not too long.
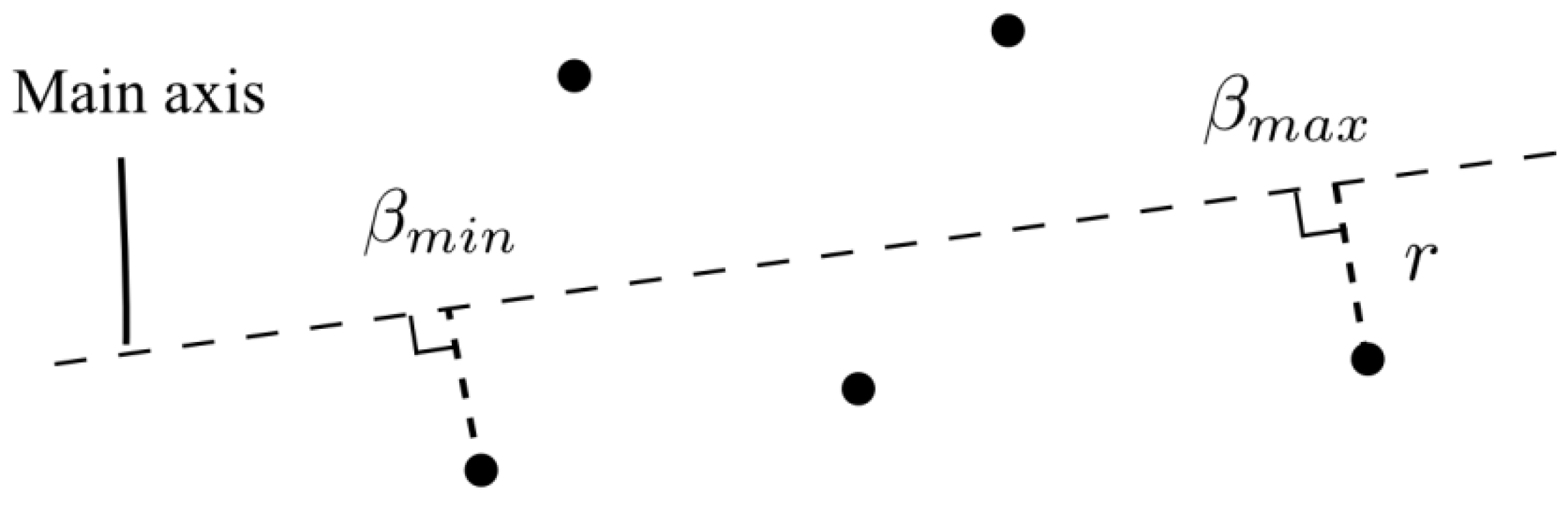
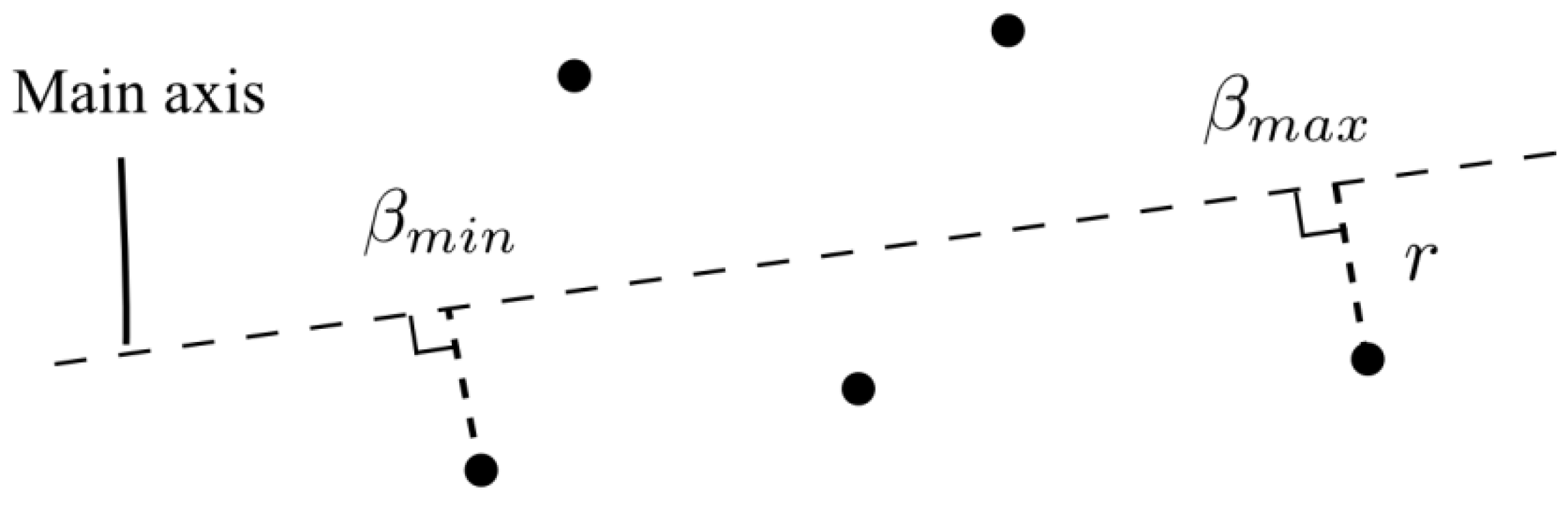
3.4. Classification of Candidate Clusters
- (a)
- The cluster’s length along its main axis has to be high enough.
- (b)
- The cluster has to consist of minimum three sweeps.
- (c)
- The cluster has to have a pole-like shape.
- (d)
- The main axis of the cluster should be close to vertical.
- (e)
- There should not be too many points around the cluster in its close neighbourhood.

4. Results and Discussion
4.1. Data Reference
| Statistical Number | Data Reference d < 30 m | Data Reference d < 12.5 m |
|---|---|---|
| Completeness (%) | 77.7 | 83.5 |
| Correctness (%) | 81.0 | 86.5 |
| Mean Accuracy (%) | 79.3 | 85.0 |

| Subclasses | Detection Rates (%) | |
|---|---|---|
| Data Reference | Field Reference | |
| Traffic Signs | 73.3 | 59.0 |
| Lamp posts | 93.0 | 93.0 |
| Tree Trunks | 76.1 | 64.6 |
| Targets with Length ≥ 2.5 m | – | 81.6 |
| Targets Thicker than 10 cm | – | 78.8 |
4.2. Field Reference
| Statistical Number | Field Reference d < 30 m | Field Reference d < 12.5 m |
|---|---|---|
| Completeness (%) | 67.1 | 76.4 |
| Correctness (%) | 81.7 | 87.4 |
| Mean Accuracy (%) | 73.7 | 81.5 |
4.3. Validation of the Method
4.4. Applicability of the Method in Other MMS
4.5. Future Work
5. Conclusions
Acknowledgements
References
- Brenner, C. Extraction of Features from Mobile Laser Scanning Data for Future Driver Assistance Systems. In Proceedings of the 12th Agile Conference, Hannover, Germany, 2009.
- Chen, Y.-Z.; Zhao, H.-J.; Shibasaki, R. A Mobile System Combining Laser Scanners and Cameras for Urban Spatial Objects Extraction. In Proceedings of the Sixth International Conference on Machine Learning and Cybernetics, Hong Kong, China, 2007.
- Manandhar, D.; Shibasaki, R. Feature Extraction from Range Data. In Proceedings of the 22nd Asian Conference on Remote Sensing, Singapore, 2001.
- Shi, Y.; Shibasaki, R.; Shi, Z. Towards Automatic Road Mapping by Fusing Vehicle-Borne Multi-Sensor Data. Int. Arch. Photogramm. Remote Sens. 2008, XXXVII–B5, 867–872. [Google Scholar]
- Doubek, P.; Perd'och, M.; Matas, J.; Šochman, J. Mobile Mapping of Vertical Traffic Infrastructure. In Proceedings of the 13th Computer Vision Winter Workshop 2008, Ljubljana, Slovenia, 2008.
- Li, R.; Wang, W.; Tseng, H.Z. Detection and Location of Objects from Mobile Mapping Image Sequences by Hopfield Neural Networks. Photogramm. Eng. Remote Sens. 1999, 65, 1199–1205. [Google Scholar]
- Hyyppä, J.; Hyyppä, H.; Yu, X.; Kaartinen, H.; Kukko, A.; Holopainen, M. Forest Inventory Using Small-Footprint Airborne LiDAR. In Topographic Laser Ranging and Scanning, Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Sithole, G.; Vosselman, G. Experimental Comparison of Filter Algorithms for Bare-Earth Extraction from Airborne Laser Scanning Point Clouds. ISPRS J. Photogramm. Remote Sens. 2004, 59, 85–101. [Google Scholar] [CrossRef]
- Hyyppä, J.; Hyyppä, H.; Litkey, P.; Yu, X.; Haggrén, H.; Rönnholm, P.; Pyysalo, U.; Pitkänen, J.; Maltamo, M. Algorithms and Methods of Airborne Laser Scanning for Forest Measurements. Int. Arch. Photogramm. Remote Sens. 2004, XXXVI–8/W2, 82–89. [Google Scholar]
- Brenner, C. Building Reconstruction from Images and Laser Scanning. Int. J. Appl. Earth Obs. Geoinf. 2005, 6, 187–198. [Google Scholar] [CrossRef]
- Maas, H.G.; Vosselman, G. Two Algorithms for Extracting Building Models from Raw Laser Altimetry Data. ISPRS J. Photogramm. Remote Sens. 1999, 54, 153–163. [Google Scholar] [CrossRef]
- Ahokas, E.; Kaartinen, H.; Matikainen, L.; Hyyppä, J.; Hyyppä, H. Accuracy of High-Pulse-Rate Laser Scanners for Digital Target Models. In Observing Our Environment from Space: New Solutions for a New Millennium: Proceedings of the 21st EARSeL Symposium, Paris, France, 14–16 May 2001; Balkema: Leiden, the Netherlands, 2002; pp. 175–178. [Google Scholar]
- Stamos, I.; Allen, P. 3-D Model Construction Using Range and Image Data. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Hilton Head, SC, USA, 2000; pp. 1531–1536.
- Boulaassal, H.; Landes, T.; Grussenmeyer, P.; Tarsha-Kurdi, F. Automatic Segmentation of Building Façades Using Terrestrial Laser Data. Int. Arch. Photogramm. Remote Sens. 2007, XXXVI–3/W52, 65–70. [Google Scholar]
- Pu, S.; Vosselman, G. Extracting Windows from Terrestrial Laser Scanning. Int. Arch. Photogramm. Remote Sens. 2007, XXXVI–3/W52, 320–325. [Google Scholar]
- Gorte, B.; Pfeifer, N. Structuring Laser-Scanned Trees Using 3D Mathematical Morphology. Int. Arch. Photogramm. Remote Sens. 2004, XXXV–B5, 929–933. [Google Scholar]
- Pfeifer, N.; Gorte, B.; Winterhalder, D. Automatic Reconstruction of Single Trees from Terrestrial Laser Scanner Data. Int. Arch. Photogramm. Remote Sens. 2004, XXXV–B5, 114–119. [Google Scholar]
- El-Sheimy, N. An Overview of Mobile Mapping Systems. In Proceedings of the FIG Working Week 2005 and GSDI-8, Cairo, Egypt, 2005; pp. 16–21.
- Jaakkola, A.; Hyyppä, J.; Hyyppä, H.; Kukko, A. Retrieval Algorithms for Road Surface Modelling Using Laser-Based Mobile Mapping. Sensors 2008, 8, 5238–5249. [Google Scholar] [CrossRef]
- Goulette, F.; Nashashibi, F.; Abuhadrous, I.; Ammoun, S.; Laurgeau, C. An Integrated On-board Laser Range Sensing System for On-the-Way City and Road Modelling. In Proceedings of ISPRS Commission I Symposium, Paris, France, 2006.
- Früh, C.; Jain, S.; Zakhor, A. Data Processing Algorithms for Generating Textured 3D Building Façade Meshes from Laser Scans and Camera Images. Int. J. Comput. Vis. 2005, 61, 159–184. [Google Scholar] [CrossRef]
- Yu, S.; Sukumar, S.; Koschan, A.; Page, D.; Abidi, M. 3D Reconstruction of Road Surfaces Using an Integrated Multi-Sensory Approach. Opt. Lasers Eng. 2007, 45, 808–818. [Google Scholar] [CrossRef]
- Zhao, H.; Shibasaki, R. Reconstructing a Textured CAD Model of an Urban Environment Using Vehicle-Borne Laser Range Scanners and Line Cameras. Mach. Vis. Appl. 2003, 14, 35–41. [Google Scholar] [CrossRef]
- Petrie, G.; Toth, C.K. Terrestrial Laser Scanners. In Topographic Laser Ranging and Scanning, Principles and Processing; Shan, J., Toth, C.K., Eds.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Ellum, C.; El-Sheimy, N. Land-Based Mobile Mapping Systems. Photogramm. Eng. Remote Sens. 2002, 68, 13–17. [Google Scholar]
- Tao, C. Mobile Mapping Technology for Road Network Data Acquisition. J. Geospat. Eng. 2000, 2, 1–13. [Google Scholar]
- Newman, T.S.; Flynn, P.J.; Jain, A.K. Model-Based Classification of Quadric Surfaces. CVGIP: Image Underst. 1993, 58, 235–249. [Google Scholar] [CrossRef]
- Marshall, D.; Lukacs, G.; Martin, R. Robust Segmentation of Primitives from Range Data in the Presence of Geometric Degeneracy. IEEE Trans. Pattern. Anal. Mach. Intell. 2001, 23, 304–314. [Google Scholar] [CrossRef]
- Lukács, G.; Martin, R.; Marshall, D. Faithful Least-Squares Fitting of Spheres, Cylinders, Cones and Tori for Reliable Segmentation. In Proceedings of the Fifth European Conference on Computer Vision, Freiburg, Germany, 1998.
- Rabbani, T.; van den Heuvel, F. Efficient Hough Transform for Automatic Detection of Cylinders in Point Clouds. Int. Arch. Photogramm. Remote Sens. 2005, XXXVI–3/W19, 60–65. [Google Scholar]
- Bolles, R.; Fischler, M. A Ransac-Based Approach to Model Fitting and Its Application to Finding Cylinders in Range Data. In Proceedings of the 7th IJCAI, Vancouver, Canada, 1981; pp. 637–643.
- Chaperon, T.; Goulette, F. Extracting Cylinders in Full 3D Data Using a Random Sampling Method and the Gaussian Image. In Proceedings of the Vision Modeling and Visualization Conference, University of Stuttgart, Germany, 2001; pp. 35–42.
- Schnabel, R.; Wahl, R.; Klein, R. Efficient Ransac for Point-Cloud Shape Detection. Comput. Graph. Forum 2007, 26, 214–226. [Google Scholar] [CrossRef]
- Luo, D.; Wang, Y. Rapid Extracting Pillars by Slicing Point Clouds. Int. Arch. Photogramm. Remote Sens. 2008, XXXVII–B3b, 215–218. [Google Scholar]
- Forsman, P. Three-Dimensional Localization and Mapping of Static Environments by Means of Mobile Perception. PhD Thesis, Helsinki University of Technology, Espoo, Finland, 2001. [Google Scholar]
- Aschoff, T.; Spiecker, H. Algorithms for the Automatic Detection of Trees in Laser Scanner Data. Int. Arch. Photogramm. Remote Sens. 2004, XXXVI–8/W2, 71–75. [Google Scholar]
- Bienert, A.; Maas, H.-G.; Scheller, S. Analysis of the Information Content of Terrestrial Laserscanner Point Clouds for the Automatic Determination of Forest Inventory Parameters. In Proceedings of the International Workshop on 3D Remote Sensing in Forestry, Vienna, Austria, 2006; pp. 55–60.
- Bienert, A.; Scheller, S.; Keane, E.; Mohan, F.; Nugent, C. Tree Detection and Diameter Estimations by Analysis of Forest Terrestrial Laserscanner Point Clouds. Int. Arch. Photogramm. Remote Sens. 2007, XXXVI–3/W52, 50–55. [Google Scholar]
- Király, G.; Brolly, G. Tree Height Estimation Methods for Terrestrial Laser Scanning in a Forest Reserve. Int. Arch. Photogramm. Remote Sens. 2007, XXXVI–3/W52, 211–215. [Google Scholar]
- Liang, X.; Litkey, P.; Hyyppä, J.; Kukko, A.; Kaartinen, H.; Holopainen, M. Plot-Level Trunk Detection and Reconstruction Using One-Scan-Mode Terrestrial Laser Scanning Data. In Proceedings of the International Workshop on Earth Observation and Remote Sensing Applications, Beijing, China, 2008; pp. 1–5.
- Litkey, P.; Liang, X.; Kaartinen, H.; Hyyppä, J.; Kukko, A.; Holopainen, M. Single-Scan TLS Methods for Forest Parameter Retrieval. In Proceedings of the SilviLaser 2008, Edinburgh, UK, 2008; pp. 295–304.
- Haala, N.; Reulke, R.; Thies, M.; Aschoff, T. Combination of Terrestrial Laser Scanning with High Resolution Panoramic Images for Investigations in Forest Applications and Tree Species Recognition. In Proceedings of the ISPRS Working Group V/1 “Panoramic Photogrammetry Workshop”, Dresden, Germany, 2004.
- Liang, X.; Litkey, P.; Hyyppä, J.; Kaartinen, H.; Vastaranta, M.; Holopainen, M. Automatic Stem Location Mapping Using TLS for Plot-Wise Forest Inventory. In Proceedings of the SilviLaser, College station, TX, USA, 2009.
- Lalonde, J.-F.; Vandapel, N.; Huber, D.F.; Hebert, M. Natural Terrain Classification Using Three-Dimensional Ladar Data for Ground Robot Mobility. J. Field Robot. 2006, 23, 839–861. [Google Scholar] [CrossRef]
- Munoz, D.; Bagnell, J.A.; Vandapel, N.; Hebert, M. Contextual Classification with Functional Max-Margin Markov Networks. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Miami Beach, FL, USA, 2009.
- Kukko, A. Road Environment Mapper—3D Data Capturing with Mobile Mapping. Licentiate’s Thesis, Helsinki University of Technology, Espoo, Finland, 2009. [Google Scholar]
- Kukko, A.; Andrei, C.-O.; Salminen, V.-M.; Kaartinen, H.; Chen, Y.; Rönnholm, P.; Hyyppä, H.; Hyyppä, J.; Chen, R.; Haggrén, H.; Kosonen, I.; Čapek, K. Road Environment Mapping System of the Finnish Geodetic Institute—FGI Roamer. Int. Arch. Photogramm. Remote Sens. 2007, XXXVI–3/W52, 241–247. [Google Scholar]
- Hyötyniemi, H. Multivariate Regression—Techniques and Tools; Report 125; Helsinki University of Technology, Control Engineering Laboratory: Helsinki, Finland, 2001. [Google Scholar]
- Sithole, G.; Vosselman, G. Automatic Structure Detection in a Point-Cloud of an Urban Landscape. In Proceedings of the 2nd GRSS/ISPRS Joint Workshop on Remote Sensing and Data Fusion over Urban Areas, Berlin, Germany, 2003.
- Jiang, X.; Bunke, H. Fast Segmentation of Range Images into Planar Regions by Scan Line Grouping. Mach. Vis. Appl. 1994, 7, 115–122. [Google Scholar] [CrossRef]
- Jiang, X.; Bunke, H.; Meier, U. High-Level Feature Based Range Image Segmentation. Image Vis. Comput. 2000, 18, 817–822. [Google Scholar] [CrossRef]
- Hoover, A.; Jean-Baptiste, G.; Jiang, X.; Flynn, P.; Bunke, H.; Goldgof, D.; Bowyer, K.; Eggert, D.; Fitzgibbon, A.; Fisher, R. An Experimental Comparison of Range Image Segmentation Algorithms. IEEE Trans. Pattern. Anal. Mach. Intell. 1996, 18, 673–689. [Google Scholar] [CrossRef]
- Helldén, U. A Test of Landsat-2 Imagery and Digital Data for Thematic Mapping, Illustrated by an Environmental Study in Northern Kenya; Rapporter och Notiser 47; Lunds Universitets Naturgeografiska Institution: Lund, Sweden, 1980. [Google Scholar]
- de la Escalera, A.; Armingol, J.M.; Mata, M. Traffic Sign Recognition and Analysis for Intelligent Vehicles. Image. Vis. Comput. 2003, 21, 247–258. [Google Scholar] [CrossRef]
© 2010 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open-access article distributed under the terms and conditions of the Creative Commons Attribution license ( http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Lehtomäki, M.; Jaakkola, A.; Hyyppä, J.; Kukko, A.; Kaartinen, H. Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sens. 2010, 2, 641-664. https://doi.org/10.3390/rs2030641
Lehtomäki M, Jaakkola A, Hyyppä J, Kukko A, Kaartinen H. Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sensing. 2010; 2(3):641-664. https://doi.org/10.3390/rs2030641
Chicago/Turabian StyleLehtomäki, Matti, Anttoni Jaakkola, Juha Hyyppä, Antero Kukko, and Harri Kaartinen. 2010. "Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data" Remote Sensing 2, no. 3: 641-664. https://doi.org/10.3390/rs2030641
APA StyleLehtomäki, M., Jaakkola, A., Hyyppä, J., Kukko, A., & Kaartinen, H. (2010). Detection of Vertical Pole-Like Objects in a Road Environment Using Vehicle-Based Laser Scanning Data. Remote Sensing, 2(3), 641-664. https://doi.org/10.3390/rs2030641