

Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review


1
School of Communications and Information Engineering, Chongqing University of Posts and Telecommunications, Chongqing 400065, China
2
Department of Land Surveying and Geo-Informatics, The Hong Kong Polytechnic University, Hong Kong 999077, China
3
State Key Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing (LIESMARS), Wuhan University, Wuhan 430079, China
*
Author to whom correspondence should be addressed.
Remote Sens. 2024, 16(2), 398; https://doi.org/10.3390/rs16020398
Submission received: 27 October 2023
/
Revised: 15 January 2024
/
Accepted: 18 January 2024
/
Published: 19 January 2024
(This article belongs to the Special Issue Advanced Technologies for Position and Navigation under GNSS Signal Challenging or Denied Environments III)
Abstract
:High-precision indoor positioning technology is regarded as one of the core components of artificial intelligence (AI) and Internet of Things (IoT) applications. Over the past decades, society has observed a burgeoning demand for indoor location-based services (iLBSs). Concurrently, ongoing technological innovations have been instrumental in establishing more accurate, particularly meter-level indoor positioning systems. In scenarios where the penetration of satellite signals indoors proves problematic, research efforts focused on high-precision intelligent indoor positioning technology have seen a substantial increase. Consequently, a stable assortment of location sources and their respective positioning methods have emerged, characterizing modern technological resilience. This academic composition serves to illuminate the current status of meter-level indoor positioning technologies. An in-depth overview is provided in this paper, segmenting these technologies into distinct types based on specific positioning principles such as geometric relationships, fingerprint matching, incremental estimation, and quantum navigation. The purpose and principles underlying each method are elucidated, followed by a rigorous examination and analysis of their respective technological strides. Subsequently, we encapsulate the unique attributes and strengths of high-precision indoor positioning technology in a concise summary. This thorough investigation aspires to be a catalyst in the progression and refinement of indoor positioning technologies. Lastly, we broach prospective trends, including diversification, intelligence, and popularization, and we speculate on a bright future ripe with opportunities for these technological innovations.
1. Introduction
Precise indoor positioning and navigation are regarded as core components of the Internet of Things (IoT) and artificial intelligence (AI), which also play an essential role in smart city applications. Navigation and positioning are both related and different; navigation requires positioning information and can also help improve the performance of positioning. Navigation is developed on the basis of positioning to guide and control carrier navigation, while positioning is developed to acquire the location of users under different scenarios. High-precision positioning information is the foundation for providing highly reliable location-based services (LBSs). With the continuous development of technology, particularly in wireless communication, high-precision navigation and positioning are becoming ubiquitous in public daily life. For outdoor environments, the Global Navigation Satellite System (GNSS) has been widely used with significant practical applications. By applying related technology such as real-time kinematic (RTK) [1] and precise point positioning (PPP) [2], along with high-precision atmospheric rectification and orbit correction [3] provided using ground-based augmentation systems (GBAS) such as ground tracking stations, sub-meter or even centimeter-level positioning accuracy can be achieved in open areas of outdoor environments. However, GNSS signals are often inaccurate or even rendered ineffective in enclosed indoor environments or urban canyons due to their susceptibility to signal interference, such as signal blockage and multipath effects. According to the report from the US Environmental Protection Agency, humans spend nearly 70~90% of their time indoors [4], leading to a demand for indoor positioning, such as user habit analytics, intelligent robots, mall navigation and shopping guidance, and emergency evacuation. Sustainable and intelligent indoor positioning has become a hot research topic for research institutions and enterprises, aiming to address the “last kilometer” problem unaddressed by outdoor GNSS-based navigation.
Classical indoor positioning methodologies predominantly incorporate technologies such as Wi-Fi and Bluetooth. Typically, the spatial accuracy of fingerprint recognition methods hovers within the range of 2 to 5 m [5]. The white paper on fifth-generation mobile communication technology (5G) sets a clear mandate that both indoor and outdoor positioning accuracy should surpass a metric precision of one meter [6,7,8]. Underpinned by the continuous evolution of technologies such as 5G communications, IoT, AI, and cloud services, a plethora of opportunities have emerged for high-precision location services. These include applications in logistics management, trajectory tracking, personal inquiries, and the increasingly pervasive Internet of Everything. As such, sustainable, high-precision indoor positioning technology has experienced rapid growth and development. Riding this wave of progression, technology continues to break new ground, pushing the envelope even further in terms of precision and applicability. It is noteworthy that these advancements, driven by research and innovation, could potentially revolutionize how we navigate indoor environments and interact with the digital world.
Table 1 lists existing surveys on indoor localization and demonstrates how the scope of this survey is different from the existing ones.
It can be seen from Table 1 that the current reviews about indoor positioning technologies mostly involve one or several kinds of positioning methods, while none of the current reviews focus on meter-level indoor positioning methods. Therefore, this paper provides a comprehensive discussion and summarization of advanced technologies with positioning accuracy better than 1 m. Currently, numerous scholars have conducted research on various positioning technologies, including Wi-Fi Fine Time Measurement (FTM) [21], ultra-wideband (UWB) [22], acoustic signal [23], pseudolites [24], 5G [25], magnetic field [26], channel state information (CSI) [27], visible light [28], inertial navigation [29], visual odometry [30], quantum navigation [31], and others. These merging sustainable positioning technologies significantly improve the accuracy of indoor positioning and meet the application needs of most indoor scenarios. This paper focuses on high-precision indoor positioning technology, providing an overview of the sustainable development of technology status, followed by a basic explanation of the principles and applications of mainstream high-precision indoor positioning technologies, mainly based on geometric relations, fingerprint matching, and incremental estimation. Furthermore, this article analyzes and summarizes the characteristics of existing high-precision, especially meter-level indoor positioning technologies, and discusses their future development trends.
The remainder of this article is organized as follows. Section 2 presents the current development of meter-level indoor positioning technologies. Section 3 compares the characteristics of current meter-level indoor positioning technologies. Section 4 presents the development trends of meter-level indoor positioning technologies. Section 5 concludes this article.
2. Current Development of Meter-Level Indoor Positioning Technologies
This paper mainly discusses the current development of high-precision indoor positioning technologies with an accuracy better than 1 m based on smart platforms. The classification of indoor positioning was introduced in [4]. The authors analyzed a classification method based on location type, globality, activeness, accuracy, and coverage range, helping developers better evaluate positioning performance. In reference [32], they presented three classification methods: classification based on location-awareness technology, classification based on signal measurement technology, and classification based on sensor types. Reference [33] reviewed the latest positioning methods, techniques, and technologies using IoT terminals and pointed out the challenges in real-world applications.
This paper refers to the classification methods in the existing literature, aiming at realizing high-accuracy indoor positioning technologies on the IoT platform. We categorize existing meter-level indoor positioning technologies into four categories: geometry-based, fingerprint-based, incremental estimation, and quantum navigation-based high-precision indoor positioning. We categorize these four kinds of meter-level indoor positioning technologies based on their measurement principle and the way of location acquisition, in which the geometry approach focuses on distance or angle measurements from local stations with absolute coordinates, the fingerprint approach focuses on acquiring location information according to the generated database, incremental estimation focuses on continuous recursion based on previous location information, and quantum navigation acquires location information based on the quantum entanglement.
2.1. Current Development of Geometry-Relation-Based Positioning
High-precision indoor positioning based on geometry relation relies on the distance and angle measurements between base stations and mobile terminals. It establishes the relationship between the observed quantities and the parameters to be estimated based on geometric principles. Commonly used observed quantities include round-trip time (RTT), Time of Arrival (TOA), Time Difference of Arrival (TDOA), Angle of Arrival (AOA), and received signal strength (RSS). TDOA and TOA can be measured using geometric relations; TDOA is a positioning methodology that determines the difference between the measured TOA signals from different wireless stations, while RSS measurements need to be converted through path loss models. The trilateration-based measurement and positioning principle is commonly employed, which involves the distance measurement results of time-based or RSS-based approaches, as shown in Figure 1. Points A, B, and C represent the known points, while point P represents the unknown point. , , and correspond to the measurement variables of the signals observed from points A, B, and C to point O. The angle measurement and positioning principle are based on AOA measurements, as shown in Figure 2. Points A and B are the known points, while point O represents the unknown point, with and denoting the AOA. Each positioning technique discussed in the following sections revolves around one or more measurement variables, and certain geometric measurement variables have general applicability.
With the development of wireless communication and signal detection, geometry-relation-based indoor positioning has emerged as a high-accuracy distance/angle measurement technology instead of traditional RSS-based ranging approaches. In this section, five different kinds of geometry-relation-based positioning technologies are compared: Wi-Fi FTM, UWB, acoustic, pseudo-satellite, 5G, and visible light communication. In which the Wi-Fi FTM and UWB are applied based on the wireless TOA/TDOA/RTT measurements, acoustics technology is applied based on the sound-based TOA/TDOA measurements, pseudo-satellite is applied as the same protocol as the outdoor GNSS, and 5G supports both TOA and AOA.
2.1.1. Wi-Fi-FTM-Based Positioning
In December 2016, with the release of the new IEEE 802.11 standard, an additional IEEE 802.11mc protocol introduced a new Wi-Fi Fine Time Measurement function [34]. This standard supports calculating the distance between the mobile terminal as the initiator and the Wi-Fi access point (AP) as the responder by measuring the round-trip time (RTT) information [21]. The measurement principle is illustrated in Figure 3. Firstly, the initiator sends an FTM ranging request to the responder, and the responder responds by sending an acknowledge character (ACK) signal. Then, the responder initiates the FTM ranging signal, and multiple sets of FTM signals are exchanged between the initiator and the responder. In Figure 3 [35], , , , and represent the times measured between the initiator and the responder during one exchange period. This ranging method can be used simultaneously for multiple initiators and responders. Since the distance between the initiator and the responder is determined by subtracting the time difference between the initiator’s timestamp and the responder’s timestamp, twice the flight time equals ( − ) − ( − ) and can also calculate the average of multiple time differences for improving the ranging accuracy. This approach effectively mitigates the impact of clock drift without the need for clock synchronization. The average RTT information is calculated as follows:
where t1_k indicates the recorded timestamp of ranging parameters firstly emitted by the initiator, t2_k represents the timestamp of the acquired ranging parameters by the responder, t3_k indicates the timestamp when the responder returns back the ACK signal to the initiator, t4_k indicates the timestamp of the final received ACK signal by the initiator side, and the n represents the definition of “FTMs per burst” during each ranging procedure, in which burst indicates the entire process of obtaining RTT measurements under each round.
In terms of application research, reference [37] proposed a dedicated short-range communication method improved by Wi-Fi FTM for outdoor vehicle ranging and discussed a time series compression method that discarded the most significant bit of each FTM frame. Reference [38] proposed a machine learning-based ranging method that effectively addressed the low bandwidth problem and improved ranging accuracy through a trained model using precise measurement values and indoor channel simulation values. The authors in Reference [36] proposed an effective integration model based on Wi-Fi FTM and smartphone built-in sensors. To decrease the effects of indoor multipath propagation and non-line-of-sight (NLOS), a novel Wi-Fi FTM ranging model is generated, and the Unscented Kalman Filter (UKF) is applied for multi-source fusion with the enhancement of multi-pattern PDR. The proposed fusion structure effectively maintains the positioning accuracy of Wi-Fi FTM in NLOS/LOS mixed indoor environments [39,40]. In their paper [41], they further extended the 2D Wi-Fi-FTM-based positioning system into 3D by proposing a 3D-WFBS structure, using the combination of proximity detection and a ranging model to provide more Wi-Fi FTM observations. Furthermore, an unscented particle filter (UPF) is developed to fuse the different location sources together with the quasi-static magnetic field (QSMF)-assisted PDR. Meter-level positioning accuracy can be realized in complex 3D environments using the proposed 3D-WFBS structure.
Although Wi-Fi FTM has many unique advantages in indoor positioning applications, further investment is needed in terminal and software platform support. In terms of hardware, routers from companies like Google and Compulab already support Wi-Fi FTM, laying the foundation for its application. However, only a few kinds of smartphones, such as the Google Pixel series and Xiaomi Redmi Note 9 Pro, currently support Wi-Fi FTM, so its widespread commercial use has not yet been achieved at this stage due to the hardware differences between terminal manufacturers. In addition, more and more IoT products—such as Esp32s2, developed by ESPRESSIF—have also begun to support Wi-Fi FTM. In the future, Wi-Fi FTM will still be a sustainable development direction for the high-precision indoor positioning field due to its wide range of potential applications in IoT terminals.
2.1.2. UWB-Based Positioning
UWB is a short-range, high-bandwidth wireless communication technology. As defined by the United States Federal Communications Commission (FCC), signals are wireless signals with a relative bandwidth exceeding 20% of the center frequency or an absolute bandwidth equal to or greater than 500 MHz [22]. UWB signals are characterized by a series of extremely short pulses, typically ranging from a few nanoseconds to less than one nanosecond in duration. Each pulse possesses a significantly wide spectral bandwidth, which grants UWB signals exceptional time resolution. Under ideal conditions, UWB signals can achieve centimeter-level ranging accuracy. Moreover, UWB signals demonstrate remarkable attributes such as strong penetration capabilities, resistance to multipath interference, and high transmission rates. Common UWB positioning systems rely on the principles of TOA, TDOA, or Two-Way Time of Flight (TW-TOF) for accurate position estimation.
In terms of practical applications, Ubisense introduced an indoor positioning system that leveraged TDOA and TOA techniques coupled with UWB technology [42]. This state-of-the-art system delivered remarkable positioning accuracy of up to 15 cm, covering a range of 50 m [43]. Furthermore, DecaWave developed a low-power UWB chip that enabled researchers to pursue secondary development and use two-way ranging (TWR) approaches to avoid the clock drift of the IoT hardware platform. This chip offered a positioning accuracy of up to 30 cm. Notably, the Chinese industrial sector has made significant strides in advancing UWB positioning technology. Companies such as H3C Technologies Co., Limited in Hangzhou and EverHigh Technology Co., Ltd. in Chengdu have successfully developed high-precision UWB positioning systems. In summary, the TOA-based approach requires time synchronization, by which the positioning accuracy would be limited by the performance of IoT hardware, while the use of TDOA and TWR can effectively reduce the effect of clock drift and maintain accuracy.
In Reference [44], a collaborative ultra-wideband positioning system based on TDOA and two-way ranging was implemented. This system effectively utilized the distance differential observation values to the base station and the distance observation values to other tags, resulting in a significant improvement in positioning accuracy. In Reference [45], the UWB system employed distance estimation techniques along with heading information provided by the inertial measurement unit (IMU) to achieve synchronized position estimation of tags and base stations. The achieved accuracies were 0.77 m and 0.5 m, respectively. One of the main challenges in UWB positioning was the influence of non-line-of-sight (NLOS) conditions. In dynamic indoor environments, there was a significant disparity between line-of-sight (LOS) and NLOS observations. Therefore, it was crucial to employ suitable classification methods to identify and correct NLOS situations. In Reference [46], a deep learning approach was applied to classify LOS and NLOS environments. This involved utilizing convolutional neural networks and long short-term memory networks, which achieved a high level of classification accuracy.
2.1.3. Acoustic-Based Positioning
The acoustic positioning system normally achieves localization by measuring the propagation distance of sound from the audio base station to the receiving device. With the sound’s propagation speed limited to 340.29 m/s, a high time synchronization is not required for the acoustic positioning system. A synchronization accuracy of 0.1 ms is adequate to achieve a ranging accuracy of 3.4 cm. Moreover, audio components offer cost advantages and easy deployment. When considering the audio types, acoustic positioning signals can be classified into single-frequency signals, orthogonal coding-based modulation signals, and linear frequency modulation (chirp) signals [23]. Among these, single-frequency signals are typically within the audible range but exhibit limited interference resistance. Chirp signals currently dominate the mainstream as they are better suited for locating moving targets. In terms of measurement methods, acoustic positioning techniques can be categorized into TOA, TDOA, and Doppler-effect-based methods.
In chirp-based acoustic localization, the accurate detection of the shortest path from the speaker nodes to the signal receiver is crucial due to the influence of multipath and NLOS. There are primarily two methods for detecting the shortest path: (1) time–frequency analysis, which is based on the linear change of signal frequency over time; (2) cross-correlation-based method, which accurately measures the degree of matching between the signals from the speaker nodes and the receiver. The maximum peak value is often used to search for the shortest path.
Reference [47] presented an indoor positioning system for smartphones using acoustic signals. It detects signals from base stations and uses a least-squares estimator for static situations and a Kalman filter with an inertial measurement unit for dynamic situations. The system achieves high accuracy in range estimation, with static positioning accuracy below 0.5 m and comparable performance to ultra-wideband technology in dynamic scenarios. The authors in [48] developed an acoustic positioning system like Beep but utilized chirp signals in the frequency range of 18–22 kHz, resulting in a dynamic positioning accuracy of 0.3 m. In the subsequent reference [49], a significant breakthrough was made by employing a chirp signal ranging from 3 to 8 kHz. This approach yielded a superior ranging accuracy of less than 0.3 m within a distance range of 30 m, showcasing a substantial improvement over the traditional matched filtering method. Additionally, reference [50] introduces an acoustic indoor positioning method. It employs a dual-step chirp signal detection algorithm, including coarse and fine searches. The coarse search achieves a success rate of over 99.9% and an error rate below 0.4%. The fine search offers accurate ranging, with average errors and RMSE below 0.25 m and 0.35 m.
2.1.4. Pseudo-Satellite-Based Positioning
Pseudo-satellite positioning technology utilizes ground-based pseudo-satellites capable of transmitting signals like those of a Global Navigation Satellite System (GNSS) for distance positioning. This technology employs distinct signals and mechanisms to avoid interference with GNSS satellites. Within the realm of pseudo-satellite positioning technology, one category focuses on improving the geometric distribution of GNSS satellites, while the other enables direct, independent positioning. The latter involves users receiving GNSS-like signals on their receivers and accurately calculating coordinates. Indoor positioning utilizes the second category of pseudo-satellite positioning technology. In addition to the challenges of clock synchronization and the multipath effect, pseudo-satellite positioning also faces the disadvantage of a fixed constellation structure, which impacts the precision of positioning. In addition, near–far interference is also an unavoidable problem for pseudo-satellite positioning systems due to the fact that receivers that are close to the transmitter experience much stronger signals than those that are far away. The methods suggested for overcoming the near–far problem focus on pulsing the pseudolite signals or applying frequency offsets and alternative codes.
In the realm of research, pseudo-satellite positioning is closely associated with satellite navigation systems. Pseudo-satellites, such as the Yuma satellite navigation testbed established by the United States [51], were utilized for the initial validation of the Global Positioning System (GPS). Currently, the Locata Corporation offers the most advanced indoor pseudo-satellite system. Their solution employed time lock technology to achieve precise time synchronization, enabling the neglect of clock discrepancies when processing phase information. In non-differential scenarios, the horizontal positioning error was below 6 cm, while the vertical accuracy was approximately 15 cm [52]. Simulations conducted in reference [53] demonstrated that high precision could be attained by fixing ambiguities using the Least-Squares Ambiguity Decorrelation Adjustment (LAMBDA) and Extended Kalman Filter (EKF) methods.
Reference [54] introduced a novel pseudo-satellite-based indoor positioning system. The pseudo-satellite clocks could be synchronized with each other, and the signals could be processed using standard receivers. Simulation results indicated that this method achieved high-precision horizontal positioning in both static and dynamic scenarios. Furthermore, reference [55] employed an improved particle swarm optimization algorithm to enhance the search efficiency of the ambiguity function method. This approach aimed to achieve high-precision positioning at the centimeter level for a single epoch. In reference [56], a novel pseudo-satellite positioning approach was implemented, eliminating the need for known point initialization. This method considered the accuracy requirements of the LAMBDA method and achieved rapid fixing of pseudo-satellite ambiguities. Notably, the positioning accuracy reached the centimeter and millimeter levels in dynamic and static tests, respectively.
2.1.5. 5G-Based Positioning
Featuring high speed, low latency, large capacity, high bandwidth, and massive antenna arrays, 5G is the latest generation of cellular mobile communication technology. These characteristics can be applied to indoor positioning, where the sparse nature of high-frequency channels effectively mitigates multipath interference. The low latency also contributes to precise ranging, while the massive antenna arrays provide higher spatial resolution for beamforming. The angular measurement accuracy increases with the number of antennas. Previous cellular positioning based on 4G is affected by signal bandwidth, synchronization, and network deployment. The positioning accuracy is generally around tens of meters. With the presentation of 5G, the support of large bandwidth, multiple antennas, and high-precision synchronization technology can make 5G-based positioning more accurate. At present, the accuracy can reach the meter level in test scenarios, which can make up for the deficiencies of satellite positioning in indoor and tunnel environments. Currently, TOA and AOA positioning are the main research directions for 5G base station localization using signal detection technology with large bandwidth, multiple antennas, and high-precision synchronization.
In the realm of research, reference [57] proposed an algorithm for estimating the TOA in 5G millimeter wave communications based on distributed compressed sensing. This algorithm reconstructs the subcarrier reconstruction signal into the global channel through weighted summation, effectively mitigating the influence of Gaussian noise. Moreover, it eliminates erroneous elements using the spatial generalized expectation maximization principle before estimating the delay, thereby achieving a precise estimation of the major path delay. In their analysis, reference [58] examined the localization and directional observations imposed by millimeter-wave multipath channels in both uplink and downlink scenarios, offering a comprehensive discussion on the independent boundaries of various system parameters. However, time synchronization remains a challenge for 5G TOA positioning, as the current synchronization error in 5G networks stands at approximately 50 ns. This error can lead to a distance measurement discrepancy of up to 15 m, highlighting a need for future improvements in this area.
In terms of AOA positioning, reference [59] utilized a rotation-invariant approach to calculate set source factors and employed an oblique projection structure for AOA estimation. Reference [60] effectively derived the Cramér-Rao lower bound for location update in millimeter wave systems under multipath channels. Real-world experiments in different environments demonstrated millimeter-level localization precision.
Given the existing limitations in timestamp synchronization precision and the relatively lower stability of crystal oscillators at the receiving end, AOA-based positioning methods are considered more reasonable.
2.1.6. Visible-Light-Based Positioning
With the continuous advancement of visible light communication and light source detection technology, the widespread application of LED light sources provides favorable conditions for the research and application of Visible Light Positioning (VLP) technology in the field of indoor positioning. VLP technology uses the widely existing indoor LED light sources as positioning beacons, considering both communication positioning and lighting. It has the advantages of simple system deployment, no electromagnetic interference, high positioning accuracy, and low cost, showing good application prospects in the field of indoor positioning. In 2020, the National Standardization Management Committee released the Information Technology Visible Light Communication System Indoor Positioning Transmission Protocol Standard (GB/T 36628.4-2019) [61], drafted by the China Electronics Standardization Institute, HiSilicon Technologies Co., Ltd., Tsinghua University, Information Engineering University, Peking University, and other universities and companies. This marks the implementation phase of the industrialization of visible light communication positioning applications in China.
Visible Light Positioning (VLP) technology is an application of Visible Light Communication (VLC) technology. Depending on the type of sensor used by the positioning terminal to receive VLC signals, it can be divided into imaging and non-imaging methods [62]. The non-imaging method, also known as the PD method, mainly uses PD to receive and analyze visible light signals and received signal strength (RSS) and performs ranging intersection [63] or fingerprint matching [64] based on RSS to achieve position estimation of the PD terminal. The positioning accuracy can reach a sub-meter or even a centimeter level. The literature [65,66], respectively, studied the VLP system based on the VLC’s time of arrival (TOA) and time difference of arrival (TDOA). The method based on TDOA achieved a simulation accuracy of 3.6 cm in a 5 m × 5 m × 3 m environment. The literature [67] used a circular PD array to construct a VLP method based on the angle of arrival (AOA) and proposed a weighted angle perception calculation method. The VLP method can also combine multiple methods [28], improving the system’s anti-interference ability and positioning accuracy. The VLP method based on PD has a high communication rate and fast positioning speed; however, it has high control requirements for the light source system, the system design is relatively complex, the portability is poor, and the positioning accuracy is greatly affected by the environment.
The VLP method based on imaging is simply referred to as the Image Sensor (IS) method. It mainly uses a CMOS sensor to image the VLP light source, utilizes the rolling shutter effect of the CMOS sensor to obtain the stripe image of the VLP light source, and obtains the coordinate information corresponding to the light source ID through the stripe image [68]. Then, the spatial coordinates of the photographic point relative to the VLC light source are calculated through the principle of photogrammetry, thereby achieving positioning [69]. The IS method has a small communication transmission capacity, but it has high positioning accuracy and strong portability. With the widespread application of CMOS imaging sensors in smart terminals, the IS method based on smartphones and visual mobile robots has achieved many application results [70].
2.2. Current Development of Fingerprint-Based Positioning
The fundamental principle underlying high-precision positioning based on fingerprint matching involves computing the disparities between the measured data and the reference fingerprints stored in the database to achieve the closest match. The positioning process encompasses an offline phase and an online phase, as depicted in Figure 4. In this context, , , and denote signal access points, while , , and represent received signal strengths. and correspond to the media access control (MAC) addresses associated with and , respectively. and indicate the signal strengths of and within the grid, respectively. During the offline collection stage, distinctive features are extracted from the raw signals. Subsequently, in the learning stage, these features undergo processing to establish a database or a corresponding mathematical model. In the positioning stage, real-time features acquired during the process are combined with the learned database or data model to determine the real-time location accurately. Fingerprint features are derived from a variety of sensors, including magnetic field features, cellular signal features, Wi-Fi signal features, visual image features, radar point cloud features, and more. The focus of this paper revolves around introducing fingerprint-based localization methods that leverage magnetic field features and CSI features.
The final constructed fingerprinting database can be described as follows:
where j indicates the capacity of the final generated fingerprinting database. represents the location of each reference point in the generated database, and is the corresponding RSS vector.
The traditional RSS-based fingerprinting-based positioning makes it difficult to realize meter-level accuracy due to the large fluctuation of RSS signals and deviations between different hardware platforms. This section focuses on three merging fingerprinting-based positioning technologies using more stable and refined features, including magnetic field, CSI, and visible light. Magnetic-based fingerprinting can be realized without additional stations, and CSI and visible-light-based approaches require the deployment of local stations to obtain the navigation database.
2.2.1. Magnetic-Field-Based Positioning
Magnetic-field-based positioning technology refers to the utilization of the carrier’s real-time collection of characteristic information from the geomagnetic field during its movement. Subsequently, a comparison is made between the stored geomagnetic reference map and the collected geomagnetic data, and the best matching result is obtained based on certain criteria, enabling autonomous positioning of the carrier. The influence of indoor buildings on the magnetic field leads to distortions and creates specific patterns. In contrast to RSS features, the characteristics of buildings make the magnetic field features more unique. As a result, the measured feature data are not affected by time or obstacles. Magnetic positioning can be classified into two methods: based on active magnetic fields (external emission sources) and based on passive magnetic fields. Active magnetic field positioning usually requires the deployment of numerous coils and devices. In general, the passive magnetic field approach is primarily used, which relies on the Earth’s magnetic field and the magnetic field distortions within the environment for positioning.
In previous studies, the earliest application of geomagnetic fields for positioning was in the self-localization of robots. In reference [71], the disturbance characteristics of geomagnetic information caused by indoor structures were utilized for robot self-localization, enabling preliminary position determination in a corridor. Reference [72] further discovered that the steel-reinforced concrete building framework induces system-level disturbances in the indoor magnetic field, resulting in unique patterns in the geomagnetic field distribution for each indoor scene. Fingerprint-based localization techniques based on geomagnetic features achieved an accuracy of over 90%.
However, the geomagnetic signals can exhibit similar intensities at different locations and vary over time, leading to significant mismatches when relying solely on magnetic field intensity matching. Subsequently, researchers found that geomagnetic sequences of the same indoor trajectory exhibit similarities across different time periods, reducing the mismatch rate. In reference [73], the dynamic time warping (DTW) algorithm was applied using the geomagnetic intensity modulus as a feature for geomagnetic positioning, achieving real-time matching with a positioning accuracy of 1 m. In reference [74], a temporal convolutional network (TCN) was used to extract features from the triaxial geomagnetism in the time domain. With a grid length of 10.2 m, the matching accuracy was better than 0.7 m.
2.2.2. Channel-State-Information-Based Positioning
The traditional RSS represents the superposition effect of multipath propagation in the channel, while CSI conveys the channel’s state and can characterize the multipath propagation of the signal. Compared to RSS, CSI provides richer signal features. Firstly, it can roughly distinguish propagation paths based on the time-domain delays and frequency-domain attenuations. Secondly, it can obtain the amplitude characteristics of each subcarrier, adding more fingerprint features. Since its introduction in 2011, CSI has been widely studied and applied [75].
Research in this field primarily focuses on broadband communication systems such as Wi-Fi and Long-Term Evolution (LTE). For Wi-Fi, Reference [76] was the first to utilize CSI data for fingerprint matching, enabling indoor positioning systems. In reference [77], a feedback decision tree was used to analyze subcarrier amplitude values and establish a random forest model, achieving positioning accuracies better than 0.2 m and 0.4 m in LOS and NLOS environments, respectively, with four Wi-Fi Aps. Currently, there are no consumer-grade products available for LTE CSI. Smartphones can only obtain the received signal strength indication (RSSI), reference signal receiving power (RSRP), and reference signal receiving quality (RSRQ) of neighboring base stations through the application programming interface (API).
Professional equipment such as Universal Software Radio Peripheral (USRP) (Ettus Research, New York, NY, USA) is required to access CSI information. Utilizing the widespread adoption of wireless technology and IoT progression, Reference [78] introduces a passive 3D indoor tracking system that caters to the rising interest in context-sensitive applications without additional detectors or user interaction. The proposed method reduces ambient interference by employing wireless signal channel status data in a radio grid, enhancing user-device interaction. They divide 3D space, construct a radio grid from channel status data, and transform these data into a tensor using a CP decomposition technique. The extracted attributes are optimized with t-SNE and information theory, forming a refined fingerprint grid. A recurrent neural network model learns from this optimized dataset, establishing a nonlinear correlation for accurate indoor tracking. The proposed method, tested on standard wireless technology in indoor environments, demonstrates robust meter-level precision and interference resistance.
2.3. Current Development of Incremental-Estimation-Based Positioning
High-precision positioning based on incremental estimation refers to a positioning technique that utilizes integration, matching, and other methods to measure the position and attitude changes between consecutive epochs in order to obtain the current position. It is a form of incremental localization, merging localization systems containing inertial navigation and visual/laser odometry.
The advantages of incremental estimation-based positioning technology are that they can realize more refined pedestrian motion and position tracking without additional local facilities and can also maintain their accuracy using optimization algorithms or in a short time period. The disadvantages of incremental estimation-based positioning technology focus on the cumulative error caused by incremental algorithms and complex human motion and handheld modes during the walking period.
2.3.1. Inertial Navigation
The inertial navigation system (INS) normally utilizes the inertial measurement unit (IMU) to obtain the inertial and rotational information of a carrier. By integrating this information with the initial navigation state of the INS (position, attitude, and velocity), it determines the 3D pose and attitude of the carrier based on the previous status and real-time motion data. Depending on the sensor deployment platform, there are two types of inertial navigation systems: a gimbaled inertial navigation system (GINS) and a strap-down inertial navigation system (SINS) mounted directly on the carrier. INS is updated using the dead reckoning (DR)-based approach [79], and therefore, it accumulates errors over time. The positioning accuracy of INS depends on sensor quality and sensor placement. Research suggests that foot-mounted inertial navigation can achieve positioning errors of less than 1% of the traveled distance through zero-velocity updates to restrict drift [80]. Since the performance of INS is affected by both algorithms and hardware levels, achieving meter-level positioning accuracy requires overall improvements in position and attitude update algorithms and hardware performance.
For indoor scenarios in the field of pedestrian navigation, pedestrian dead reckoning (PDR) based on smartphones has been a research focus in recent years, which updates the location of the pedestrian using step detection and step-length estimation-based algorithms. Because of the low-precision sensors integrated into smartphones, it is difficult to realize meter-level positioning accuracy using only the PDR algorithm; hence, the PDR algorithm is usually combined with INS and other absolute location sources or using the optimization algorithm and map-matching algorithm to achieve meter-level performance.
Reference [81] introduced a cost-effective, low-power personnel positioning system using foot-mounted inertial modules, smartphones, and QR code markers. It achieved precise real-time localization through data fusion, proving its effectiveness and feasibility in extensive indoor and outdoor experiments. Reference [82] introduced a robust smartphone-based PDR algorithm, integrating gyroscope, accelerometer, and magnetometer data with gravity and magnetic field vectors, posture, and gait models. Experimental results showed superior position estimation performance across various phone positions, surpassing existing methods. Reference [83] presented the NavShoe system, which utilized inertial sensing for position tracking in wearable computing and mixed reality. It overcame the limitations of existing methods, eliminating the need for markers or mapping. The compact, low-power device provided reliable approximate position and precise foot orientation tracking. Reference [84] proposed an accurate and convenient indoor pedestrian positioning system (IPPS) that could acquire pedestrian trajectories in multistory buildings. It utilized algorithms to match trajectories, correct drift errors, and offer wide application potential and cost-effectiveness.
2.3.2. Visual/Laser Odometry
Visual odometry (VO), also known as visual simultaneous localization and mapping (SLAM), is the front end of SLAM. Its objective is to establish matching relationships between observed data [85]. It gained popularity in 2004 and serves a similar purpose to wheel odometry. It estimates the motion parameters of a mobile robot incrementally, but instead of relying on wheel rotations to measure distance traveled, VO utilizes images captured using cameras, making it less affected by adverse terrain conditions. Corresponding points are selected for feature matching between images, and based on the coordinate changes of these points between consecutive frames, the camera’s pose change is estimated, and the motion trajectory is constructed [86]. In the case of a monocular camera, the camera’s motion is estimated based on two sets of 2D points using Epipolar Geometry, as illustrated in Figure 5. The pose estimation stage can be divided into direct and feature-based methods. The direct method utilizes all image information and minimizes the grayscale error between adjacent frames based on the brightness constancy assumption for corresponding points to estimate the pose. The feature-based method involves extracting feature points from each frame and then matching them using descriptors or optical flow [87] to establish positional associations between different images for pose estimation.
In related research, a study [88] proposed an improved Scale-Invariant Feature Transform (SIFT) method for extracting image feature points. Based on the scale and rotation invariance of feature points, accurate matching of projected points in the image was achieved. Another study [89] introduced Dense Tracking and Mapping in Real Time (DTAM), which used the direct method to obtain real-time dense maps and camera poses based on the entire image matching. It was the first system to use the direct method for SLAM localization. In a separate study [90], a direct large-scale monocular SLAM algorithm was proposed. This algorithm achieved high-precision pose estimation and could reconstruct a semi-dense depth map and a pose graph of keyframes for the 3D environment map. Another study [91] utilized a convolutional neural network to extract features and build an image database index. Then, the Oriented FAST and Rotated BRIEF (ORB) detection algorithms were used to extract corresponding feature points and establish their relationships. The pose change matrix was calculated, and the system achieved average positioning accuracy better than 0.1 m and orientation accuracy better than 0.2° on the datasets from Imperial College London and the National University of Ireland, Maynooth.
2.4. Current Development of Quantum Navigation
Quantum navigation is a navigation and positioning technology based on quantum properties that was first proposed in reference [92]. It uses quantum effect sensors to calculate actual physical quantities such as the intensity, frequency, time, and phase of electric or magnetic fields, obtaining position and time information with higher precision than classical measurements. Since quantum navigation does not use electromagnetic waves but relies on the preparation and transmission technology of quantum entangled states, it has unique advantages in terms of information transmission security and accuracy. Quantum navigation is expected to solve the problems of security, accuracy, and usage condition limitations faced by traditional navigation and has become a research hotspot in the new generation of navigation technology. At this stage, quantum theory can be leveraged in both satellite-based quantum navigation systems and inertial navigation.
The satellite-based quantum navigation system operates on a positioning principle akin to traditional Global Navigation Satellite Systems (GNSS). However, instead of transmitting electromagnetic wave signals like GNSS, it utilizes ranging signals that are pulsed and exhibit quantum characteristics composed of photons that are devoid of charge or mass.
In terms of application research, reference [93] compared the atmospheric effects on satellite-based quantum communication, demonstrating several atmospheric factors on quantum communication through experimental evidence. Reference [94] investigated the potential of executing space-to-ground quantum key distribution (QKD) utilizing the orbital angular momentum (OAM) of light. Given the vulnerability of OAM states, the prevailing belief is that turbulence would make OAM QKD unfeasible in a space-to-ground channel. Reference [95] proposed a near-Earth space quantum positioning algorithm grounded on the fixed-point iteration principle and conducted simulations. The results indicated that the positioning accuracy reached 1 cm when the measurement error was 1 μm. In August 2016, China pioneered the launch of the world’s first quantum science experimental satellite, “Micius”. This groundbreaking initiative marked the first global achievement in quantum communication between satellites and ground stations. Consequently, it established an experimental system for integrated, quantum-secure communication between space and Earth.
Moreover, a novel generation of inertial navigation systems, known as the quantum inertial navigation and positioning system, is constructed on the foundations of quantum entanglement and compressibility principles. This system employs quantum gyroscopes, quantum accelerometers, and atomic clocks, all of which exhibit high sensitivity and ultra-low zero drift. In comparison to conventional inertial navigation systems, the quantum inertial navigation and positioning system delivers superior accuracy, reduced errors, and enhanced sensitivity in attitude detection. Furthermore, the inherent quantum characteristics, such as unclonability and uncertainty, offer high-level security for quantum navigation, thereby paving the way for advancements in inertial navigation.
The latest research in [96] introduces an innovative method for assessing the response of a cold atom interferometer (CAI) by tracking the atom wave packet’s position in a novel sensor frame. This approach utilizes data from a standard inertial measurement unit (IMU) and common strap-down terminology, facilitating the hybridization of both systems for acceleration and angular rate measurements. The sensor frame simplifies the mathematical representation of the CAI measurement and its integration into advanced navigation systems. The authors evaluated the dynamic terms emerging from the IMU frame transformation into the CAI sensor frame through simulations and detailed the method’s implementation as a prediction model in an Extended Kalman Filter, demonstrating significant improvements over the traditional IMU strap-down solution in realistic simulations. Reference [97] documents the development of China’s inaugural nuclear magnetic resonance gyroscope prototype, with a gyroscope zero drift of less than 2°/h. In reference [98], a measurement methodology based on hybrid entangled quantum signals was proposed, leveraging the transfer properties of quantum. This method surpassed classical techniques in terms of precision and demonstrated robust interference capabilities. In conclusion, quantum navigation, as a burgeoning navigation technology, showcases significant advantages over traditional positioning methodologies.
3. Characteristics of Current Meter-Level Indoor Positioning Technologies
The introduced meter-level indoor positioning technologies based on geometric relations, fingerprint matching, and incremental estimation exhibit characteristics of high measurement accuracy and strong spatial dependency but limited adaptability to different environments. To further enhance the accuracy and reliability of indoor positioning, a multi-sensor fusion approach is necessary. Table 2 describes the comparison of current meter-level positioning technologies. For the comparison criteria, refer to the previous studies and characteristics of the IoT-based hardware platform. We classify the 11 kinds of meter-level positioning technologies using three main principles and choose five accuracy indexes for comparison purposes: typical coverage, robustness, calculation complexity, scalability, and cost.
It can be seen from Table 1 that we classify the current 11 kinds of meter-level indoor positioning technologies into three different positioning principles and compare them using five accuracy indexes. Since the coverage index of current meter-level positioning technologies is sufficient for use in a specific scenario, for large-scale indoor areas, the scalability index is more important to maintain positioning accuracy under different application scenarios. In addition, the cost index is also an important factor for real-world applications, especially for commercial use. For the robustness index, almost all the geometric-relation- and fingerprint-matching-based technologies are affected by complex environmental interference, especially multipath propagation and NLOS, while the incremental estimation-based technologies are not affected by environments but are limited by cumulative error and complex motion modes. To a certain extent, the advantages of different positioning principle-based technologies are complementary, and the realization of multi-source integrated positioning is also a very potential direction. The special characteristics of current meter-level indoor positioning technologies are summarized as follows:
- High measurement accuracy: High-precision indoor positioning technologies based on geometric relations rely on the accuracy of time synchronization and the precision of distance and angle estimation. The TDOA positioning method only requires time synchronization between base stations. In audio-based positioning, achieving time synchronization is relatively easy due to the slower speed of sound. In this case, the focus is primarily on detecting the first path and avoiding significant time errors caused by multipath propagation, thus achieving higher positioning accuracy. For positioning methods based on the TOA principle, precise time synchronization between the transmitter and receiver is needed to ensure accurate distance measurement. Signals with high bandwidth offer excellent time resolution, resulting in higher estimation accuracy. In positioning, consideration is mainly given to the impact of hardware delays. For indoor positioning based on the AOA method, the multi-antenna array of 5G signals provides high-precision angle information, thereby obtaining accurate positioning results.
- Strong spatial dependency: High-precision positioning technologies based on fingerprint matching rely on spatial characteristics and the correlation between geographical locations, exhibiting strong spatial dependency. The establishment of fingerprints and the positioning phase are often asynchronous. Wi-Fi and LTE positioning based on CSI rely on relatively stable feature fingerprints. During the positioning phase, signal obstructions have a significant impact on the positioning results, making them highly sensitive to spatial variations. Magnetic field-based positioning relies on a previously captured magnetic reference map and the current magnetic information for comparison to obtain the positioning result. The more pronounced the spatial changes are, the more significant the magnetic information becomes. Any changes in the physical information within space directly affect the accuracy of the magnetic reference map.
- Limited environmental adaptability: Localization methods based on incremental estimation accumulate errors over time, resulting in lower positioning accuracy. Inertial sensors can provide absolute information based on measured triaxial acceleration and angular velocity, and they have a high sampling rate. However, long-term velocity and displacement integration leads to increased errors. Visual odometry relies on cameras to track key feature points in the scene. It can face challenges in scenes with weak texture or when there is rapid motion, resulting in the loss of key feature point information and the inability to obtain absolute information. Furthermore, the presence of dynamic objects in the scene can interfere with both visual and laser odometry, leading to decreased accuracy and reliability.
4. Development Trends of Meter-Level Indoor Positioning Technologies
The above section details the current development of meter-level indoor positioning technologies under four different positioning principles. According to the comparison of current meter-level indoor positioning technologies, almost all the existing geometric relation and fingerprint-matching-based technologies are affected by complex environmental interference, especially multipath propagation and NLOS, while the incremental-estimation-based technologies are not affected by environments but are limited by cumulative error and complex motion modes. Hence, there is a pressing need to develop and apply these technologies to more diverse application scenarios. In order to make the current meter-level indoor positioning technologies more suitable for the requirements of real-world applications, the development of high-precision indoor positioning technology is moving towards diversification, intelligence, and popularization. This is primarily manifested in enhanced environmental perception through multi-source fusion, interdisciplinary research with deep learning, and the exploration of low-cost, open, and universal technical solutions.
4.1. Diversification: Multi-Source Fusion Enhanced by Environmental Perception
Environmental perception can be divided into scene-type perception and motion target perception. Scene-type perception involves partial positioning sources being sensitive to obstacles in the surrounding environment, requiring perception of environments with obstacles. Examples include audio signals, Wi-Fi RTT, and other distance measurement signals. The range of accuracy decreases in NLOS environments. Fusion positioning can be achieved by combining an inertial navigation system over a certain period of time to improve positioning accuracy and reliability. Motion target perception involves positioning sources being sensitive to moving targets, requiring detection of the moving targets to avoid interference. Visual odometry technology, for example, can be disrupted by the presence of moving targets during feature point matching. By adopting environmental perception methods to segment and remove dynamic targets (e.g., deep learning), the positioning accuracy and reliability of visual odometry can be enhanced. It is evident that different indoor localization technologies exist with different strengths, weaknesses, and available usage environments. Considering the relative complexity of urban environments, relying on only one location source cannot maintain localization precision in complex scenes. Therefore, it is important to integrate different location sources and dynamically perceive environmental knowledge in real time to improve the performance of indoor localization.
During the procedure of intelligent integration, it is very important to dynamically choose different combination models of location sources and consider the error factors of different location sources. The design of the experimental scheme involves considering fusion methods and fusion algorithms. Fusion methods mainly include loosely coupled and tightly coupled. In a loosely coupled structure, each kind of location source conducts independently, and integrated locations are provided by classical filters. In a tightly coupled structure, the original observations from each positioning source are used as measurement inputs, and the integrated locations are updated using filtering algorithms. Normally applied integration structures contain a Kalman Filter (KF) [99], an Extended Kalman Filter (EKF) [100], an Unscented Kalman Filter (UKF) [101], and a Particle Filter [102]. In addition, merging graph-based multi-source fusion structures is also a hot topic; for instance, graph optimization [103], factor graph optimization [104], etc.
4.2. Intelligence: Interdisciplinary Integration with Deep Learning
For the development trend, sustainable high-precision positioning technologies will further integrate with artificial intelligence (AI) and deep learning (DL), primarily under the described three points:
- Motion scene and behavior detection: Current indoor positioning solutions still face various issues, including low-quality device data and unstable positioning source signals, which compromise system stability. Accurately perceiving the user’s location scene and behavioral semantics can make indoor positioning applications more ubiquitous and robust, and it is also a key aspect of future intelligent location services. Compared to traditional methods that rely on manually defined low-level features for scene classification and motion behavior detection, deep neural networks can automatically learn high-level features from data provided by positioning sources, achieving higher recognition accuracy.
- Data augmentation: Data augmentation is a technique that uses algorithms to generate additional data from limited data, thereby expanding the sample quantity and diversity. It can provide prior knowledge through data augmentation constraints to reduce the negative impact of irrelevant information features on the performance of deep learning models. In visual localization, traditional 2D image data augmentation methods include geometric transformations, color transformations, and pixel transformations. For fingerprint-based localization methods such as Wi-Fi and Bluetooth, traditional 1D sensor data are typically augmented by adding random noise to the fingerprint database. Currently, automatic data augmentation, data augmentation based on generative adversarial networks, and data augmentation methods combining autoencoders and generative adversarial networks are regarded as mature techniques for improving data quality.
- Uncertainty error modeling: Data fusion based on the KF plays a crucial role in indoor high-precision positioning. Data-driven deep learning models rely on statistical features rather than the physical description of the system and can learn and estimate the positioning system from input and output data. Therefore, combining deep learning algorithms with the Kalman filter allows for modeling and predicting errors [104,105]. For example, the GNSS/INS system tends to be a nonlinear system and does not follow any simple motion model when considering random errors, making error modeling challenging for micro-electro-mechanical systems (MEMS) sensors [106,107]. In typical applications, the position error from the inertial navigation system is combined with an error prediction algorithm based on neural networks to achieve external optimization of the Kalman filter. Additionally, deep learning algorithms can be adopted to generate the relationship between the Kalman filter gain and the observations within a multi-source fusion system, learning the propagation rules of signals. Aiming at changeable uncertainty errors provided by different location sources, this structure can provide more stable and accurate positioning results compared with existing approaches.
4.3. Popularization: Researching Low-Cost, Open, and Universal Technical Solution
Future meter-level indoor positioning technologies possess the characteristics of low cost and openness. On one hand, the cost reduction in sensors, such as cameras, LiDAR, and MEMS inertial sensors, lays the foundation for the development of high-precision indoor positioning technologies. On the other hand, more open data interfaces are crucial. The limitations of a single positioning source can be overcome by accessing additional physical layer information, such as LTE and 5G signal characteristics, through APIs on mobile devices. This enables the utilization of data from multiple sources for fusion-based positioning.
Due to the heterogeneity of various positioning sources in high-precision indoor positioning, it is necessary to establish a seamless and adaptable positioning system framework that can cater to different requirements and accommodate new technological advancements. This framework should possess the following features: technology-agnostic scalability to facilitate the integration of new technologies, a unified service interface for convenient location services, and strong migration capabilities for seamless integration. By constructing a universal structure, the foundation for the widespread adoption of high-precision indoor positioning in various applications can be established.
5. Conclusions
With the continuously increasing maturity of indoor positioning and navigation systems and the growing demand for high precision, especially meter-level indoor location services, there has been significant progress in the development of indoor positioning technologies that offer high precision, low cost, and high availability. In this review, high-precision indoor positioning methods are classified and introduced based on geometric relations, fingerprint matching, and incremental estimation, with quantum navigation also showing promise in specific applications. Existing positioning technologies exhibit characteristics such as high observation accuracy and strong spatial dependence. However, these indoor positioning techniques are susceptible to environmental influences and demonstrate limited environmental adaptability. Consequently, future advancements in sustainable high-precision indoor positioning will focus on environment-aware multi-source fusion, leveraging the interdisciplinary intersection of deep learning, and exploring directions that emphasize low cost, openness, and universality. With the application of next-generation communication technologies and advancements in related hardware performance, high-precision indoor positioning technologies are poised to become commonplace, greatly enhancing public daily life and social development.
In addition, since meter-level indoor positioning technologies are applied mostly to humans or smart robotics, the hardware platform and positioning solutions need to be lightweight and robust. With the continuous development of sensing technology, more and more positioning technologies and characteristics will be supported by the MEMS sensors and integrated into the smart hardware platform, which can be divided into radio-based sources—for instance, Bluetooth Low Energy (BLE)/UWB Angle of Arrival (AOA) and Angle of Departure (AOD) [108,109,110,111], acoustic-based sources such as acoustic AOA [112], and ultrasonic ranging [113]—and mapping-based sources such as Light Laser Detection and Ranging (LiDAR) [114], 4D millimeter wave radar [115], and depth/monocular camera (Author et al. [116]). How to adaptively select and integrate the above-mentioned location sources and cover complex and changeable scenarios to realize meter-level and even sub-meter-level positioning performance is also a challenge that needs to be solved, and a more diversified, intelligent, and popularized indoor positioning system is the development goal in the future.
Author Contributions
This paper is a collaborative work by all the authors. Y.Y. proposed the idea and implemented the system. L.Q. and Y.L. performed the experiments, analyzed the data, and wrote the manuscript. L.C. and R.C. aided in proposing the idea, gave suggestions, and revised the rough draft. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China under Grant 52175531, in part by the Science and Technology Research Program of Chongqing Municipal Education Commission under Grant KJQN202000605 and Grant KJZD-M202000602, and the Hong Kong Polytechnic University under Grant P0045937. This work is also supported by Open Fund of State Laboratory of Information Engineering in Surveying, Mapping and Remote Sensing, Wuhan University (Grant No. 23P03).
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Rana, M.; Mittal, V. Wearable sensors for real-time kinematics analysis in sports: A review. IEEE Sens. J. 2020, 21, 1187–1207. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Shen, Z.; Han, J.; Li, L.; Wang, B. Review of PPP–RTK: Achievements, challenges, and opportunities. Satell. Navig. 2022, 3, 28. [Google Scholar] [CrossRef]
- Kazmierski, K.; Zajdel, R.; Sośnica, K. Evolution of orbit and clock quality for real-time multi-GNSS solutions. GPS Solut. 2020, 24, 111. [Google Scholar] [CrossRef]
- Ruizhi, C.; Liang, C. Indoor Positioning with Smartphones: The State-of-the-art and the Challenges. Acta Geod. Cartogr. Sin. 2017, 46, 1316. [Google Scholar]
- Jang, B.; Kim, H. Indoor positioning technologies without offline fingerprinting map: A survey. IEEE Commun. Surv. Tutor. 2018, 21, 508–525. [Google Scholar] [CrossRef]
- Alliance, N. 5G White Paper. Next Generation Mobile Networks, White Paper, 2015, 1. Available online: https://ngmn.org/wp-content/uploads/NGMN_5G_White_Paper_V1_0.pdf (accessed on 20 September 2023).
- del Peral-Rosado, J.A.; Raulefs, R.; López-Salcedo, J.A.; Seco-Granados, G. Survey of cellular mobile radio localization methods: From 1G to 5G. IEEE Commun. Surv. Tutor. 2017, 20, 1124–1148. [Google Scholar] [CrossRef]
- Gao, K.; Wang, H.; Lv, H.; Liu, W. Toward 5G NR high-precision indoor positioning via channel frequency response: A new paradigm and dataset generation method. IEEE J. Sel. Areas Commun. 2022, 40, 2233–2247. [Google Scholar] [CrossRef]
- Harle, R. A Survey of Indoor Inertial Positioning Systems for Pedestrians. IEEE Commun. Surv. Tutor. 2013, 15, 1281–1293. [Google Scholar] [CrossRef]
- Yang, Z.; Wu, C.; Zhou, Z.; Zhang, X.; Wang, X.; Liu, Y. Mobility increases localizability: A survey on wireless indoor localization using inertial sensors. ACM Comput. Surv. (Csur) 2015, 47, 54. [Google Scholar] [CrossRef]
- Shang, J.; Hu, X.; Gu, F.; Wang, D.; Yu, S. Improvement Schemes for Indoor Mobile Location Estimation: A Survey. Math. Probl. Eng. 2015, 2015, 1–32. [Google Scholar] [CrossRef]
- Davidson, P.; Piche, R. A Survey of Selected Indoor Positioning Methods for Smartphones. IEEE Commun. Surv. Tutor. 2016, 19, 1347–1370. [Google Scholar] [CrossRef]
- Pei, L.; Zhang, M.; Zou, D.; Chen, R.; Chen, Y. A survey of crowd sensing opportunistic signals for indoor localization. Mob. Inf. Syst. 2016, 2016, 4041291. [Google Scholar] [CrossRef]
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Gu, F.; Hu, X.; Ramezani, M.; Ramezani, M.; Acharya, D.; Khoshelham, K.; Valaee, S.; Shang, J. Indoor localization improved by spatial context—A survey. ACM Comput. Surv. (CSUR) 2019, 52, 1–35. [Google Scholar] [CrossRef]
- Guo, X.; Ansari, N.; Hu, F.; Shao, Y.; Elikplim, N.R.; Li, L. A survey on fusion-based indoor positioning. IEEE Commun. Surv. Tutor. 2019, 22, 566–594. [Google Scholar] [CrossRef]
- Alam, F.; Faulkner, N.; Parr, B. Device-free localization: A review of non-RF techniques for unobtrusive indoor positioning. IEEE Internet Things J. 2020, 8, 4228–4249. [Google Scholar] [CrossRef]
- Tiglao, N.M.; Alipio, M.; Cruz, R.D.; Bokhari, F.; Rauf, S.; Khan, S.A. Smartphone-based indoor localization techniques: State-of-the-art and classification. Measurement 2021, 179, 109349. [Google Scholar] [CrossRef]
- Farahsari, P.S.; Farahzadi, A.; Rezazadeh, J.; Bagheri, A. A survey on indoor positioning systems for IoT-based applications. IEEE Internet Things J. 2022, 9, 7680–7699. [Google Scholar] [CrossRef]
- Jang, B.; Kim, H.; wook Kim, J. Survey of landmark-based indoor positioning technologies. Inf. Fusion 2023, 89, 166–188. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Li, W.; Wu, Y.; Zhou, H. A robust seamless localization framework based on Wi-Fi FTM/GNSS and built-in sensors. IEEE Commun. Lett. 2021, 25, 2226–2230. [Google Scholar] [CrossRef]
- Ridolfi, M.; Kaya, A.; Berkvens, R.; Weyn, M.; Joseph, W.; Poorter, E.D. Self-calibration and collaborative localization for UWB positioning systems: A survey and future research directions. ACM Comput. Surv. (CSUR) 2021, 54, 1–27. [Google Scholar] [CrossRef]
- Xu, S.; Chen, R.; Guo, G.; Li, Z.; Qian, L.; Ye, F.; Huang, L. Bluetooth, floor-plan, and microelectromechanical systems-assisted wide-area audio indoor localization system: Apply to smartphones. IEEE Trans. Ind. Electron. 2021, 69, 11744–11754. [Google Scholar] [CrossRef]
- Liu, X.; Yao, Z.; Lu, M. A rapid convergent positioning algorithm based on projected cancellation technique for pseudolite positioning systems. GPS Solut. 2022, 26, 15. [Google Scholar] [CrossRef]
- Wen, F.; Kulmer, J.; Witrisal, K.; Wymeersch, H. 5G positioning and mapping with diffuse multipath. IEEE Trans. Wirel. Commun. 2020, 20, 1164–1174. [Google Scholar] [CrossRef]
- Hanley, D.; De Oliveira, A.S.D.; Zhang, X.; Kim, D.H.; Wei, Y.; Bretl, T. The impact of height on indoor positioning with magnetic fields. IEEE Trans. Instrum. Meas. 2021, 70, 8501719. [Google Scholar] [CrossRef]
- Rocamora, J.M.; Wang-Hei Ho, I.; Mak, W.M.; Lau, A.P.T. Survey of CSI fingerprinting-based indoor positioning and mobility tracking systems. IET Signal Process. 2020, 14, 407–419. [Google Scholar] [CrossRef]
- Maheepala, M.; Kouzani, A.Z.; Joordens, M.A. Light-based indoor positioning systems: A review. IEEE Sens. J. 2020, 20, 3971–3995. [Google Scholar] [CrossRef]
- Bai, N.; Tian, Y.; Liu, Y.; Yuan, Z.; Xiao, Z.; Zhou, J. A high-precision and low-cost IMU-based indoor pedestrian positioning technique. IEEE Sens. J. 2020, 20, 6716–6726. [Google Scholar] [CrossRef]
- He, M.; Zhu, C.; Huang, Q.; Ren, B.; Liu, J. A review of monocular visual odometry. Vis. Comput. 2020, 36, 1053–1065. [Google Scholar] [CrossRef]
- Calderaro, L.; Agnesi, C.; Dequal, D.; Vedovato, F.; Schiavon, M.; Santamato, A.; Villoresi, P. Towards quantum communication from global navigation satellite system. Quantum Sci. Technol. 2018, 4, 015012. [Google Scholar] [CrossRef]
- Chen, R.; Guo, G.; Chen, L.; NIU, X. Application Status, Development and Future Trend of High-Precision Indoor Navigation and Tracking. Geomat. Inf. Sci. Wuhan Univ. 2023, 48, 1591–1600. [Google Scholar]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; El-Sheimy, N. Toward location-enabled IoT (LE-IoT): IoT positioning techniques, error sources, and error mitigation. IEEE Internet Things J. 2020, 8, 4035–4062. [Google Scholar] [CrossRef]
- IEEE Standard for Information Technology—Telecommunications and Information Exchange between Systems. Local and Metropolitan Area Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications. In IEEE Std 802.11 (2016) (Revision of IEEE Std 802.11-2012); IEEE: New York, NY, USA, 2016; pp. 1–3534.
- Yu, Y.; Chen, R.; Liu, Z.; Guo, G.; Ye, F.; Chen, L. Wi-Fi fine time measurement: Data analysis and processing for indoor localisation. J. Navig. 2020, 73, 1106–1128. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Guo, G.; Ye, F.; Liu, Z. A robust dead reckoning algorithm based on Wi-Fi FTM and multiple sensors. Remote Sens. 2019, 11, 504. [Google Scholar] [CrossRef]
- Niesen, U.; Ekambaram, V.N.; Jose, J.; Wu, X. Intervehicle range estimation from periodic broadcasts. IEEE Trans. Veh. Technol. 2017, 66, 10637–10646. [Google Scholar] [CrossRef]
- Dvorecki, N.; Bar-Shalom, O.; Banin, L.; Amizur, Y. A machine learning approach for Wi-Fi RTT ranging. In Proceedings of the 2019 International Technical Meeting of the Institute of Navigation, Reston, VA, USA, 28–31 January 2019; pp. 435–444. [Google Scholar]
- Martin-Escalona, I.; Zola, E. Improving Fingerprint-Based Positioning by Using IEEE 802.11 mc FTM/RTT Observables. Sensors 2022, 23, 267. [Google Scholar] [CrossRef] [PubMed]
- Feng, X.; Nguyen, K.A.; Luo, Z. Wifi access points line-of-sight detection for indoor positioning using the signal round trip time. Remote Sens. 2022, 14, 6052. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Xu, S.; Li, W.; Wu, Y.; Zhou, H. Precise 3-D indoor localization based on Wi-Fi FTM and built-in sensors. IEEE Internet Things J. 2020, 7, 11753–11765. [Google Scholar] [CrossRef]
- Ruiz, A.R.J.; Granja, F.S. Comparing ubisense, bespoon, and decawave uwb location systems: Indoor performance analysis. IEEE Trans. Instrum. Meas. 2017, 66, 2106–2117. [Google Scholar] [CrossRef]
- Jiménez, A.R.; Seco, F. Comparing Decawave and Bespoon UWB location systems: Indoor/outdoor performance analysis. In Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–8. [Google Scholar]
- Djaja-Josko, V.; Kolakowski, J. A new method for wireless synchronization and TDOA error reduction in UWB positioning system. In Proceedings of the 2016 21st International Conference on Microwave, Radar and Wireless Communications (MIKON), Krakow, Poland, 9–11 May 2016; pp. 1–4. [Google Scholar]
- Gentner, C.; Ulmschneider, M. Simultaneous localization and mapping for pedestrians using low-cost ultra-wideband system and gyroscope. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Jiang, C.; Shen, J.; Chen, S.; Chen, Y.; Liu, D.; Bo, Y. NLOS/LOS Classification Using Deep Learning Method. IEEE Commun. Lett. 2020, 24, 2226–2230. [Google Scholar] [CrossRef]
- Chen, R.; Li, Z.; Ye, F.; Guo, G.; Xu, S.; Qian, L.; Huang, L. Precise indoor positioning based on acoustic ranging in smartphone. IEEE Trans. Instrum. Meas. 2021, 70, 9509512. [Google Scholar] [CrossRef]
- Höflinger, F.; Zhang, R.; Hoppe, J.; Bannoura, A.; Reindl, L.M.; Wendeberg, J.; Bührer, M.; Schindelhauer, C. Acoustic self-calibrating system for indoor smartphone tracking (assist). In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 1–9. [Google Scholar]
- Zhang, L.; Chen, M.; Wang, X.; Wang, Z. TOA estimation of chirp signal in dense multipath environment for low-cost acoustic ranging. IEEE Trans. Instrum. Meas. 2018, 68, 355–367. [Google Scholar] [CrossRef]
- Li, Z.; Chen, R.; Guo, G.; Ye, F.; Qian, L.; Xu, S.; Chen, L. Dual-Step Acoustic Chirp Signals Detection using Pervasive Smartphones in Multipath and NLOS Indoor Environments. IEEE Internet Things J. 2023. [Google Scholar] [CrossRef]
- Parkinson, B.W.; Enge, P.; Axelrad, P.; Spilker, J.J., Jr. Global Positioning System: Theory and Applications Volume I; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 1996. [Google Scholar]
- Rizos, C.; Roberts, G.; Barnes, J.; Gambale, N. Experimental results of Locata: A high accuracy indoor positioning system. In Proceedings of the 2010 Inter-national Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–7. [Google Scholar]
- Wan, X. Research on Pseudolite Positioning Technique. Ph.D. Thesis, Shanghai Jiaotong University, Shanghai, China, 2011. [Google Scholar]
- Xu, R.; Chen, W.; Xu, Y.; Ji, S. A new indoor positioning system architecture using GPS signals. Sensors 2015, 15, 10074–10087. [Google Scholar] [CrossRef] [PubMed]
- Li, X.; Zhang, P.; Guo, J.; Wang, J.; Qiu, W. A new method for single-epoch ambiguity resolution with indoor pseudolite positioning. Sensors 2017, 17, 921. [Google Scholar] [CrossRef]
- Zhao, Y.; Guo, J.; Zhang, P. Application and Accuracy Analysis of RTK Technology in Indoor Pseudo-Satellite System. In Proceedings of the China Satellite Navigation Conference, Harbin, China, 23 May 2018. [Google Scholar]
- Shahmansoori, A.; Garcia, G.E.; Destino, G.; Seco-Granados, G.; Wymeersch, H. 5G position and orientation estimation through millimeter wave MIMO. In Proceedings of the 2015 IEEE Globecom Workshops (GC Wkshps), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Abu-Shaban, Z.; Zhou, X.; Abhayapala, T.; Seco-Granados, G.; Wymeersch, H. Error bounds for uplink and downlink 3D localization in 5G millimeter wave systems. IEEE Trans. Wirel. Commun. 2018, 17, 4939–4954. [Google Scholar] [CrossRef]
- Wan, L.; Han, G.; Shu, L.; Feng, N. The critical patients localization algorithm using sparse representation for mixed signals in emergency healthcare system. IEEE Syst. J. 2015, 12, 52–63. [Google Scholar] [CrossRef]
- Wang, P.; Pajovic, M.; Orlik, P.V.; Koike-Akino, T.; Kim, K.J.; Fang, J. Sparse channel estimation in millimeter wave communications: Exploiting joint AoD-AoA angular spread. In Proceedings of the 2017 IEEE International conference on communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- GB/T 36628.4-2019. Available online: https://openstd.samr.gov.cn/bzgk/gb/newGbInfo?hcno=047BBF8151BBA2671B49659270258F52 (accessed on 20 September 2023).
- Luo, J.; Fan, L.; Li, H. Indoor positioning systems based on visible light communication: State of the art. IEEE Commun. Surv. Tutor. 2017, 19, 2871–2893. [Google Scholar] [CrossRef]
- Afzalan, M.; Jazizadeh, F. Indoor positioning based on visible light communication: A performance-based survey of real-world prototypes. ACM Comput. Surv. (CSUR) 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Tran, H.Q.; Ha, C. Machine learning in indoor visible light positioning systems: A review. Neurocomputing 2022, 491, 117–131. [Google Scholar] [CrossRef]
- Sun, X.; Duan, J.; Zou, Y.; Shi, A. Impact of multipath effects on theoretical accuracy of TOA-based indoor VLC positioning system. Photonics Res. 2015, 3, 296–299. [Google Scholar] [CrossRef]
- Do, T.H.; Hwang, J.; Yoo, M. TDoA based indoor visible light positioning systems. In Proceedings of the 2013 Fifth International Conference on Ubiquitous and Future Networks (ICUFN), Da Nang, Vietnam, 2–5 July 2013; pp. 456–458. [Google Scholar]
- Hong, C.Y.; Wu, Y.C.; Liu, Y.; Chow, C.W.; Yeh, C.H.; Hsu, K.L.; Chen, Y.Y. Angle-of-arrival (AOA) visible light positioning (VLP) system using solar cells with third-order regression and ridge regression algorithms. IEEE Photonics J. 2020, 12, 7902605. [Google Scholar] [CrossRef]
- Xie, C.; Guan, W.; Wu, Y.; Fang, L.; Cai, Y. The LED-ID detection and recognition method based on visible light positioning using proximity method. IEEE Photonics J. 2018, 10, 7902116. [Google Scholar] [CrossRef]
- Yan, J.; Zhu, B.; Chen, L.; Wang, J.; Liu, J. Error analysis on indoor localization with visible light communication. Remote Sens. 2019, 11, 427. [Google Scholar] [CrossRef]
- Ji, Y.Q.; Xiao, C.X.; Gao, J.; Ni, J.; Cheng, H.; Zhang, P.; Sun, G. A single LED lamp positioning system based on CMOS camera and visible light communication. Opt. Commun. 2019, 443, 48–54. [Google Scholar] [CrossRef]
- Zhang, Q.; Wang, P.; Chen, Z. An improved particle filter for mobile robot localization based on particle swarm optimization. Expert Syst. Appl. 2019, 135, 181–193. [Google Scholar] [CrossRef]
- Haverinen, J.; Kemppainen, A. Global indoor self-localization based on the ambient magnetic field. Robot. Auton. Syst. 2009, 57, 1028–1035. [Google Scholar] [CrossRef]
- Jiapeng, Z.; Yunjia, W.; Xin, L.I.; Xiaoxiang, C.; Hongji, C.A.O. Research on geomagnetic indoor positioning technology. Bull. Surv. Mapp. 2019, 18–22. [Google Scholar]
- Sun, Y.; Gong, P.; Xu, Z. A Novel Indoor Positioning Based on Geomagnetic Trajectory Signal. J. Signal Process. 2021, 37, 952–957. [Google Scholar]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Tool release: Gathering 802.11 n traces with channel state information. ACM SIGCOMM Comput. Commun. Rev. 2011, 41, 53. [Google Scholar] [CrossRef]
- Wu, K.; Xiao, J.; Yi, Y.; Chen, D.; Luo, X.; Ni, L.M. CSI-based indoor localization. IEEE Trans. Parallel Distrib. Syst. 2012, 24, 1300–1309. [Google Scholar] [CrossRef]
- Wang, Y.; Xiu, C.; Zhang, X.; Yang, D. Wi-Fi indoor localization with CSI fingerprinting-based random forest. Sensors 2018, 18, 2869. [Google Scholar] [CrossRef] [PubMed]
- Ding, J.; Wang, Y.; Si, H.; Gao, S.; Xing, J. Three-dimensional indoor localization and tracking for mobile target based on wifi sensing. IEEE Internet Things J. 2022, 9, 21687–21701. [Google Scholar] [CrossRef]
- Yu, Y.; Shi, W.; Chen, R.; Chen, L.; Bao, S.; Chen, P. Map-Assisted Seamless Localization Using Crowdsourced Trajectories Data and Bi-LSTM Based Quality Control Criteria. IEEE Sens. J. 2022, 22, 16481–16491. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian tracking with shoe-mounted inertial sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Liu, T.; Kuang, J.; Ge, W.; Zhang, P.; Niu, X. A simple positioning system for large-scale indoor patrol inspection using foot-mounted INS, QR code control points, and smartphone. IEEE Sens. J. 2020, 21, 4938–4948. [Google Scholar] [CrossRef]
- Kuang, J.; Niu, X.; Chen, X. Robust pedestrian dead reckoning based on MEMS-IMU for smartphones. Sensors 2018, 18, 1391. [Google Scholar] [CrossRef]
- Qi, L.; Yu, Y.; Liu, Y.; Gao, C.; Feng, T.; Hui, J.; Wang, S. A Robust Foot-Mounted Positioning System Based on Dual IMU Data and Ultrasonic Ranging. IEEE Sens. J. 2023, 23, 4085–4095. [Google Scholar] [CrossRef]
- Niu, X.; Liu, T.; Kuang, J.; Zhang, Q.; Guo, C. Pedestrian trajectory estimation based on foot-mounted inertial navigation system for multistory buildings in postprocessing mode. IEEE Internet Things J. 2021, 9, 6879–6892. [Google Scholar] [CrossRef]
- Kazerouni, I.A.; Fitzgerald, L.; Dooly, G.; Toal, D. A survey of state-of-the-art on visual, S.L.A.M. Expert Syst. Appl. 2022, 205, 117734. [Google Scholar] [CrossRef]
- Bao, S.; Shi, W.; Chen, P.; Xiang, H.; Yu, Y. A systematic mapping framework for backpack mobile mapping system in common monotonous environments. Measurement 2022, 197, 111243. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Q.; Li, J.; Zhang, S.; Liu, J. A computationally efficient semantic slam solution for dynamic scenes. Remote Sens. 2019, 11, 1363. [Google Scholar] [CrossRef]
- Kasiselvanathan, M.; Sangeetha, V.; Kalaiselvi, A. Palm pattern recognition using scale invariant feature transform. Int. J. Intell. Sustain. Comput. 2020, 1, 44–52. [Google Scholar] [CrossRef]
- Newcombe, R.A.; Lovegrove, S.J.; Davison, A.J. DTAM: Dense tracking and mapping in real-time. In Proceedings of the 2011 International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 2320–2327. [Google Scholar]
- Engel, J.; Schöps, T.; Cremers, D. LSD-SLAM: Large-scale direct monocular SLAM. In European Conference on Computer Vision; Springer International Publishing: Cham, Switzerland, 2014; pp. 834–849. [Google Scholar]
- Chen, Y.; Chen, R.; Liu, M.; Xiao, A.; Wu, D.; Zhao, S. Indoor visual positioning aided by CNN-based image retrieval: Training-free, 3D modeling-free. Sensors 2018, 18, 2692. [Google Scholar] [CrossRef] [PubMed]
- Giovannetti, V.; Lloyd, S.; Maccone, L. Quantum-enhanced positioning and clock synchronization. Nature 2001, 412, 417–419. [Google Scholar] [CrossRef] [PubMed]
- Sharma, V.; Banerjee, S. Analysis of atmospheric effects on satellite-based quantum communication: A comparative study. Quantum Inf. Process. 2019, 18, 67. [Google Scholar] [CrossRef]
- Wang, Z.; Malaney, R.; Burnett, B. Satellite-to-earth quantum key distribution via orbital angular momentum. Phys. Rev. Appl. 2020, 14, 064031. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, X.; Deng, Y. Research on the Near-Earth Spacecraft Quantum Positioning Determinacy Algorithm. Flight Dyn. 2015, 6, 551–554. [Google Scholar]
- Tennstedt, B.; Rajagopalan, A.; Weddig, N.B.; Abend, S.; Schön, S.; Rasel, E.M. Atom Strapdown: Toward Integrated Quantum Inertial Navigation Systems. NAVIGATION J. Inst. Navig. 2023, 70, navi.604. [Google Scholar] [CrossRef]
- Song, P.; Ma, J.; Ma, Z.; Zhang, S.; Si, C.; Han, G. Research and Development Status of Quantum Navigation Technology. Laser Optoelectron. Prog. 2018, 55, 29–43. [Google Scholar]
- Ren, Z.; Miao, Q.; Wu, D. Navigation Angle Measurement Scheme Based on Hybrid Entangled Quantum Signal. Acta Opt. Sin. 2022, 42, 244–252. [Google Scholar]
- Yang, S.; Liu, J.; Gong, X.; Huang, G.; Bai, Y. A robust heading estimation solution for smartphone multi-sensor integrated indoor positioning. IEEE Internet Things J. 2021, 8, 17186–17198. [Google Scholar] [CrossRef]
- Cheng, L.; Li, Y.; Xue, M.; Wang, Y. An indoor localization algorithm based on modified joint probabilistic data association for wireless sensor network. IEEE Trans. Ind. Inform. 2020, 17, 63–72. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Li, W.; Wu, Y.; Zhou, H. H-WPS: Hybrid wireless positioning system using an enhanced wi-fi FTM/RSSI/MEMS sensors integration approach. IEEE Internet Things J. 2021, 9, 11827–11842. [Google Scholar] [CrossRef]
- Xu, S.; Chen, R.; Yu, Y.; Guo, G.; Huang, L. Locating smartphones indoors using built-in sensors and Wi-Fi ranging with an enhanced particle filter. IEEE Access 2019, 7, 95140–95153. [Google Scholar] [CrossRef]
- Wu, C.; Zhang, F.; Wang, B.; Liu, K.R. EasiTrack: Decimeter-level indoor tracking with graph-based particle filtering. IEEE Internet Things J. 2019, 7, 2397–2411. [Google Scholar] [CrossRef]
- Bai, X.; Wen, W.; Zhang, G.; Ng, H.F.; Hsu, L.T. GNSS Outliers Mitigation in Urban Areas Using Sparse Estimation Based on Factor Graph Optimization. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 197–202. [Google Scholar]
- Liu, Z.; Shi, W.; Yu, Y.; Chen, P.; Chen, B.Y. A LSTM-based approach for modelling the movement uncertainty of indoor trajectories with mobile sensing data. Int. J. Appl. Earth Obs. Geoinf. 2022, 108, 102758. [Google Scholar] [CrossRef]
- Shi, W.; Yu, Y.; Liu, Z.; Chen, R.; Chen, L. A deep-learning approach for modelling pedestrian movement uncertainty in large-scale indoor areas. Int. J. Appl. Earth Obs. Geoinf. 2022, 114, 103065. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.; Deng, Z.; Fu, M. A model-free calibration method of inertial navigation system and Doppler sensors. IEEE Sens. J. 2020, 21, 2219–2229. [Google Scholar] [CrossRef]
- Ye, H.; Yang, B.; Long, Z.; Dai, C. A method of indoor positioning by signal fitting and PDDA algorithm using BLE AOA device. IEEE Sens. J. 2022, 22, 7877–7887. [Google Scholar] [CrossRef]
- Huang, C.; Zhuang, Y.; Liu, H.; Li, J.; Wang, W. A performance evaluation framework for direction finding using BLE AoA/AoD receivers. IEEE Internet Things J. 2020, 8, 3331–3345. [Google Scholar] [CrossRef]
- Margiani, T.; Cortesi, S.; Keller, M.; Vogt, C.; Polonelli, T.; Magno, M. Angle of Arrival and Centimeter Distance Estimation on a Smart UWB Sensor Node. IEEE Trans. Instrum. Meas. 2023, 72, 9508110. [Google Scholar] [CrossRef]
- Han, S.; Yoo, H.; Choo, H.; Jang, B.J. IEEE 802.15. 4z UWB Angle of Departure Tag Design for Indoor Positioning. In Proceedings of the 2023 53rd European Microwave Conference (EuMC), Berlin, Germany, 19–21 September 2023; pp. 975–978. [Google Scholar]
- Kraljević, L.; Russo, M.; Stella, M.; Sikora, M. Free-field TDOA-AOA sound source localization using three soundfield microphones. IEEE Access 2020, 8, 87749–87761. [Google Scholar] [CrossRef]
- Fischer, G.; Bordoy, J.; Schott, D.J.; Xiong, W.; Gabbrielli, A.; Höflinger, F.; Rupitsch, S.J. Multimodal indoor localization: Fusion possibilities of ultrasonic and bluetooth low-energy data. IEEE Sens. J. 2022, 22, 5857–5868. [Google Scholar] [CrossRef]
- Dou, Z.; Yao, Z.; Zhang, Z.; Lu, M. A Lidar-assisted Self-localization Technology for Indoor Wireless Sensor Networks. IEEE Internet Things J. 2023, 10, 17515–17529. [Google Scholar] [CrossRef]
- Shastri, A.; Valecha, N.; Bashirov, E.; Tataria, H.; Lentmaier, M.; Tufvesson, F.; Casari, P. A review of millimeter wave device-based localization and device-free sensing technologies and applications. IEEE Commun. Surv. Tutor. 2022, 24, 1708–1749. [Google Scholar] [CrossRef]
- Hu, Z.; Yuan, J.; Gao, Y.; Wang, B.; Zhang, X. NALO-VOM: Navigation-Oriented LiDAR-Guided Monocular Visual Odometry and Mapping for Unmanned Ground Vehicles. IEEE Trans. Intell. Veh. 2023, 1–12. [Google Scholar] [CrossRef]
Figure 1.
(a) Trilateration-based location calculation. (b) Hyperbolic-lateration-based location calculation.
Figure 1.
(a) Trilateration-based location calculation. (b) Hyperbolic-lateration-based location calculation.
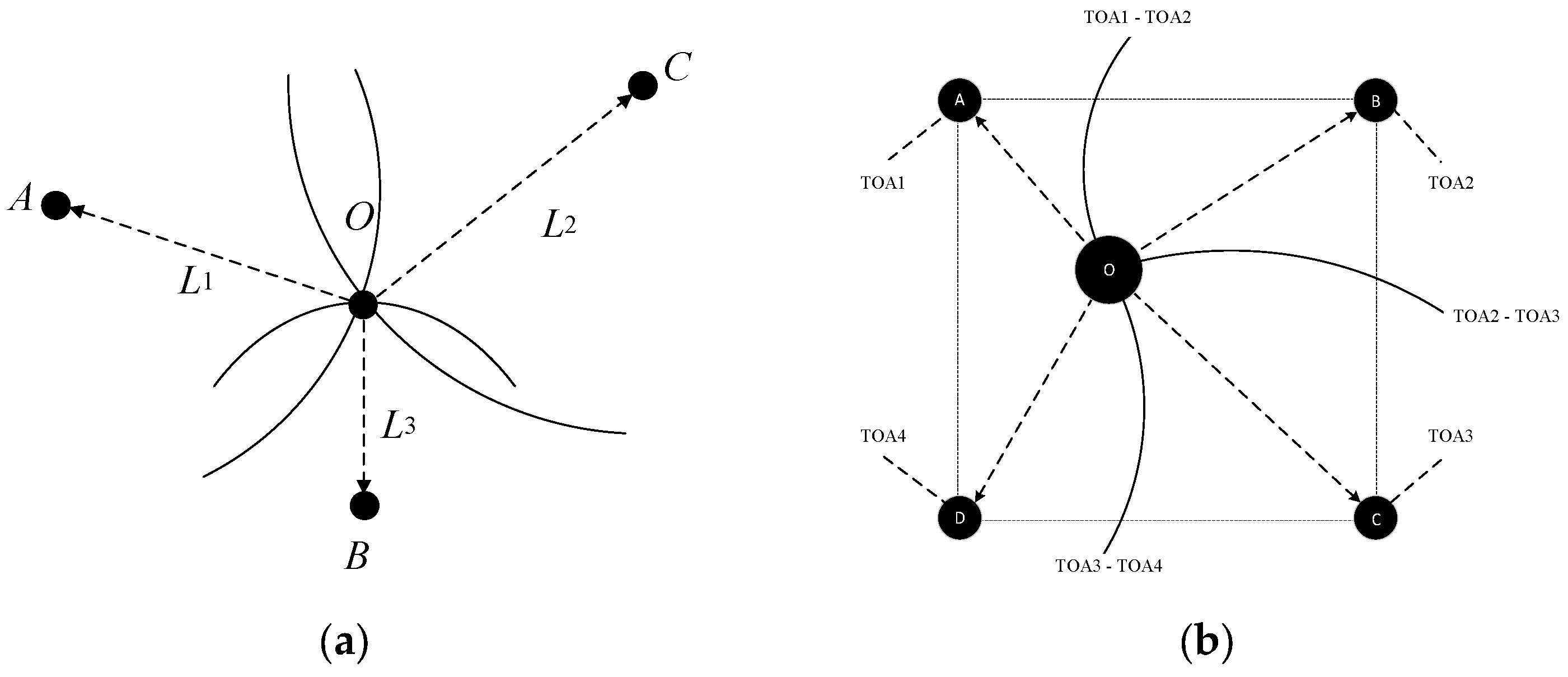
Figure 2.
Angle-measurement-based location calculation.

Figure 3.
Principle of Wi-Fi FTM; FTMs per burst = n [36].
Figure 3.
Principle of Wi-Fi FTM; FTMs per burst = n [36].
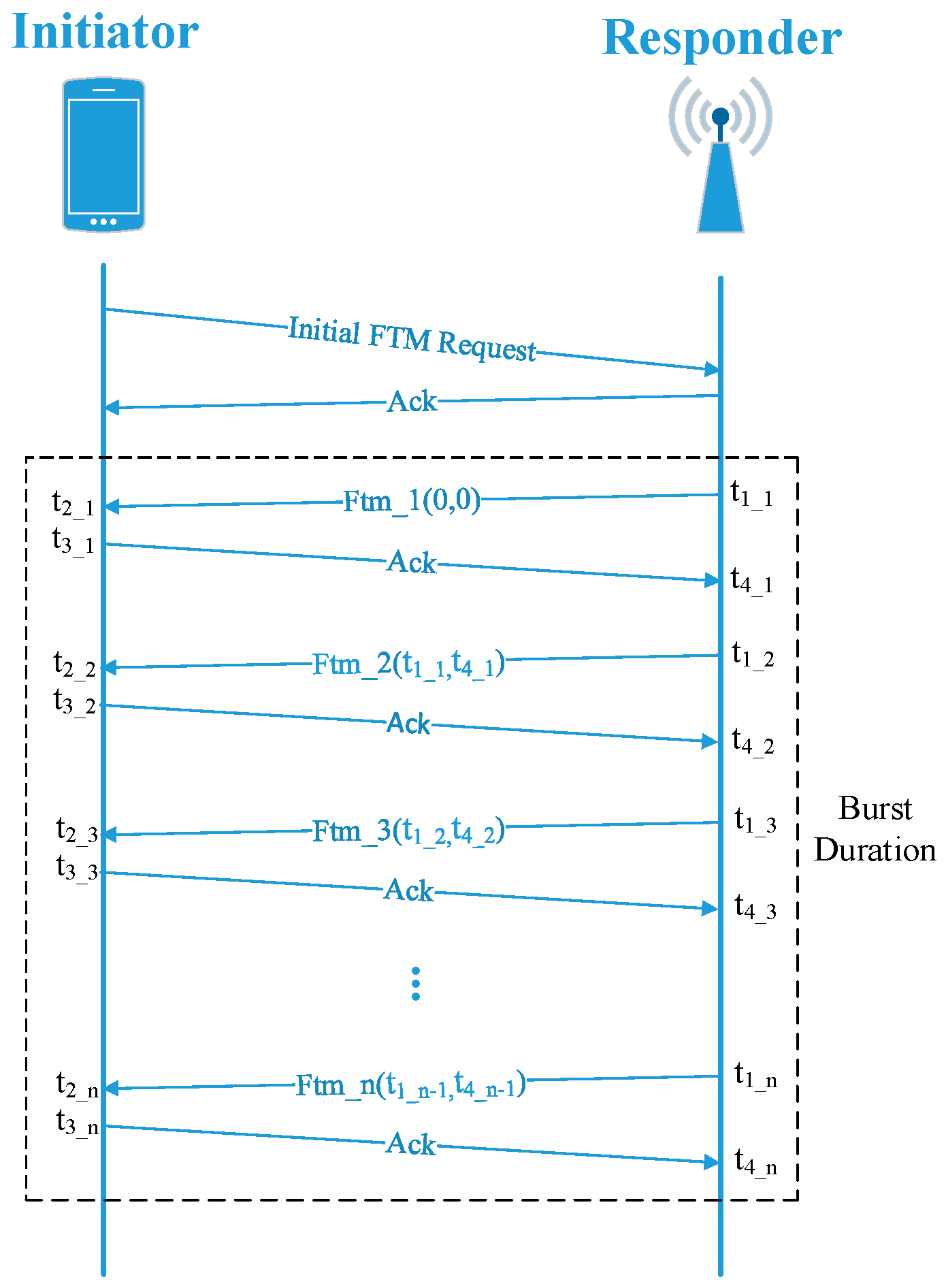
Figure 4.
Description of fingerprint-based positioning.
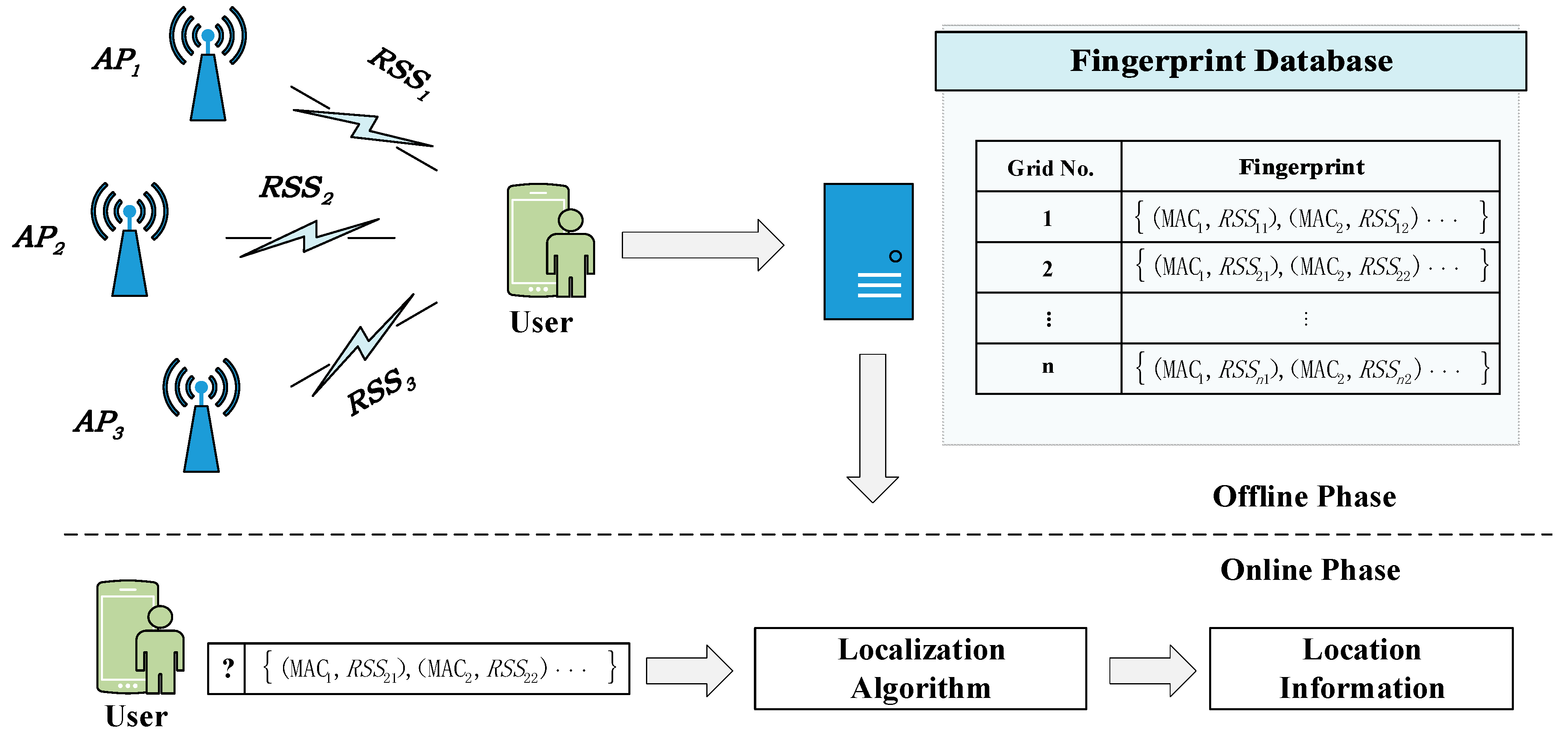
Figure 5.
Description of polar-geometric-based positioning.
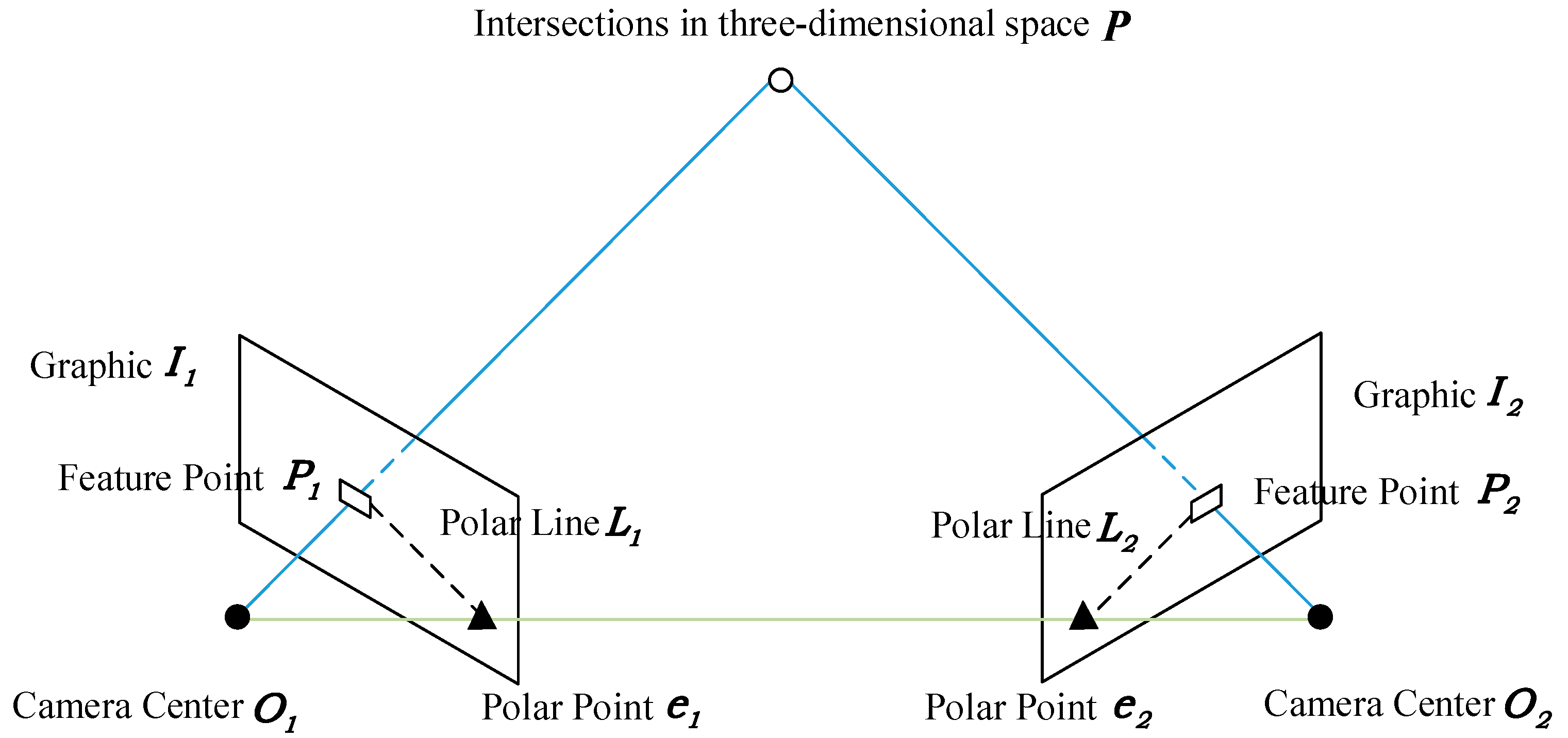

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Comparison of this work with existing survey works.
| Reference | Year | Methods | Meter-Level Accuracy Involved |
|---|---|---|---|
| Harle et al. [9] | 2013 | Dead reckoning | Partly |
| Yang et al. [10] | 2015 | Ranging, fingerprinting, dead reckoning | Partly |
| Shang et al. [11] | 2015 | Ranging, fingerprinting, dead reckoning, fusion-based | Partly |
| Davidson et al. [12] | 2016 | Ranging, fingerprinting, dead reckoning | Partly |
| Pei et al. [13] | 2016 | Ranging, dead reckoning, fusion-based | Partly |
| Zafari et al. [14] | 2017 | Ranging, fingerprinting | Partly |
| Gu et al. [15] | 2018 | Spatial constraints | Partly |
| Guo et al. [16] | 2019 | Fusion-based method | Partly |
| Alam et al. [17] | 2020 | Visible light, IR, physical excitation, electric field | Partly |
| Tiglao et al. [18] | 2021 | Wireless-based method | Partly |
| Farahsari et al. [19] | 2022 | Communication-based method | Partly |
| Jang et al. [20] | 2023 | Landmark-based method | Partly |
| This paper | 2023 | Geometry, fingerprinting, incrementation, quantum navigation | Wholly |
Table 2.
Comparison of high-precision positioning technologies.
| Positioning Principles | Positioning Technologies | Typical Coverage | Robustness | Calculation Complexity | Scalability | Cost |
|---|---|---|---|---|---|---|
| Lateration/Angulation | Wi-Fi-RTT [21,34,35,36,37,38,39,40,41] | 30–50 m | Affected by multipath propagation, NLOS, and user capacity; | Low | Easy | No additional cost |
| UWB [22,42,43,44,45,46] | 30–50 m | Prone to elec-tromagnetic interference and NLOS; | Medium | Medium | High | |
| Acoustic [23,47,48,49,50] | 30–50 m | Prone to multipath and NLOS interference; | Medium | Easy | Medium | |
| Pseudolites [51,52,53,54,55,56] | 10–1000 m | Has problems with clock synchronization, multipath, and near–far interference; | High | Medium | High | |
| Visible Light [28,62,63,64,65,66,67,68,69,70] | 10–50 m | Affected by NLOS; | Medium | Easy | High | |
| 5G [57,58,59,60] | 50–200 m | Affected by multipath propagation and NLOS; | Medium | Easy | Relatively high deployment cost | |
| Fingerprint Matching | Magnetic Field [71,72,73,74] | Do not require local stations | Not affected by obstacles but is time-consuming and labor-intensive; | High | Easy | Low |
| CSI [75,76,77,78] | 10–50 m | Time-consuming and labor-intensive; | High | Medium | High | |
| Incremental Estimation | Inertial Navigation [79,80,81,82,83,84] | Do not require local stations | Limited by cumulative error and complex motion modes; | Medium | Easy | Low |
| Visual Odometry [85,86,87,88,89,90,91] | Do not require local stations | Limited by cumulative error and complex motion modes; | Very High | Easy | Medium | |
| Quantum Navigation | Quantum Navigation [92,93,94,95,96,97,98] | Supports both active positioning and passive positioning | Enhanced information transmission security and accuracy. | Very High | Easy | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Qi, L.; Liu, Y.; Yu, Y.; Chen, L.; Chen, R. Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review. Remote Sens. 2024, 16, 398. https://doi.org/10.3390/rs16020398
AMA Style
Qi L, Liu Y, Yu Y, Chen L, Chen R. Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review. Remote Sensing. 2024; 16(2):398. https://doi.org/10.3390/rs16020398
Chicago/Turabian StyleQi, Lin, Yu Liu, Yue Yu, Liang Chen, and Ruizhi Chen. 2024. "Current Status and Future Trends of Meter-Level Indoor Positioning Technology: A Review" Remote Sensing 16, no. 2: 398. https://doi.org/10.3390/rs16020398
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.