
Performance Evaluation of LMI Based on Low-Frequency Three-Dimensional Total Lightning Flash Location Data

Abstract
:1. Introduction
2. Data Sources
2.1. FY-4A Lightning Mapping Imager
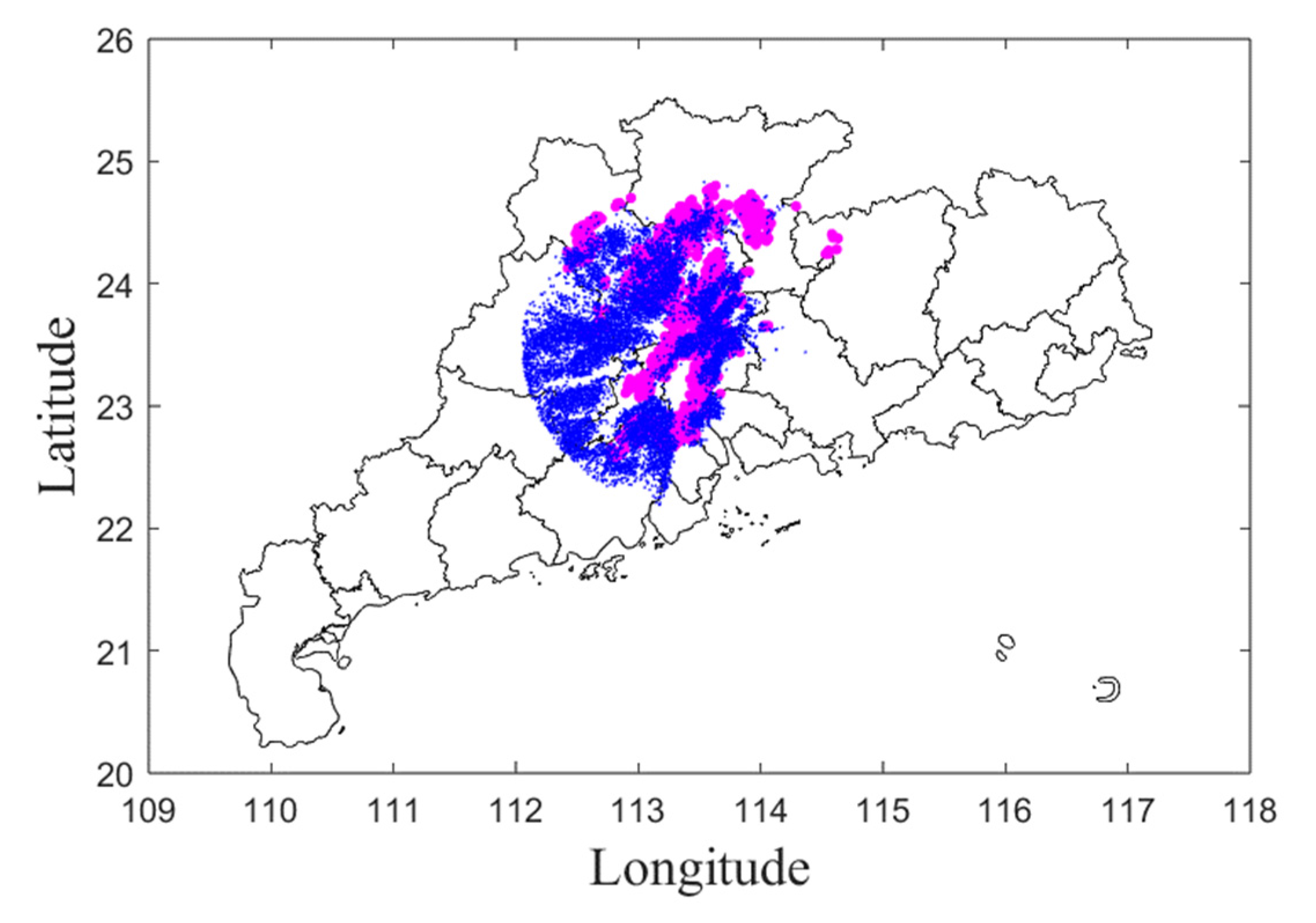
2.2. Low-Frequency Electrical Detection Array
3. Assessment Methodology
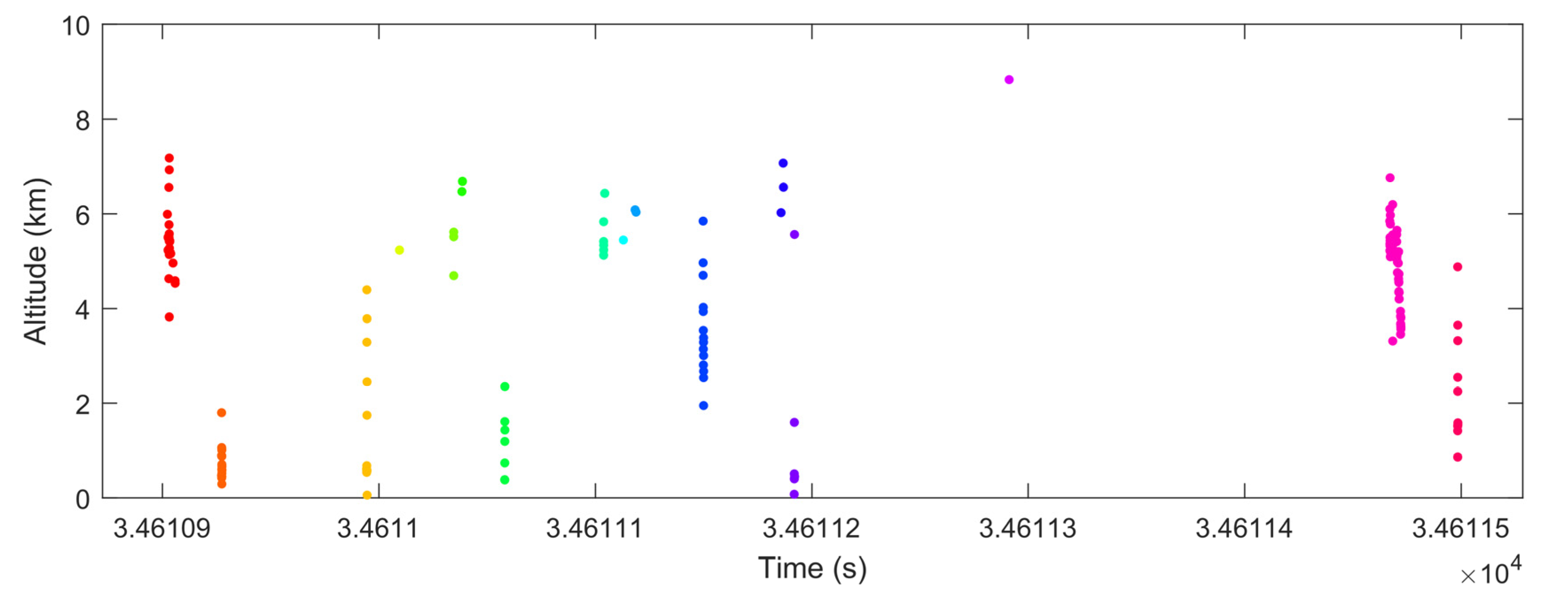
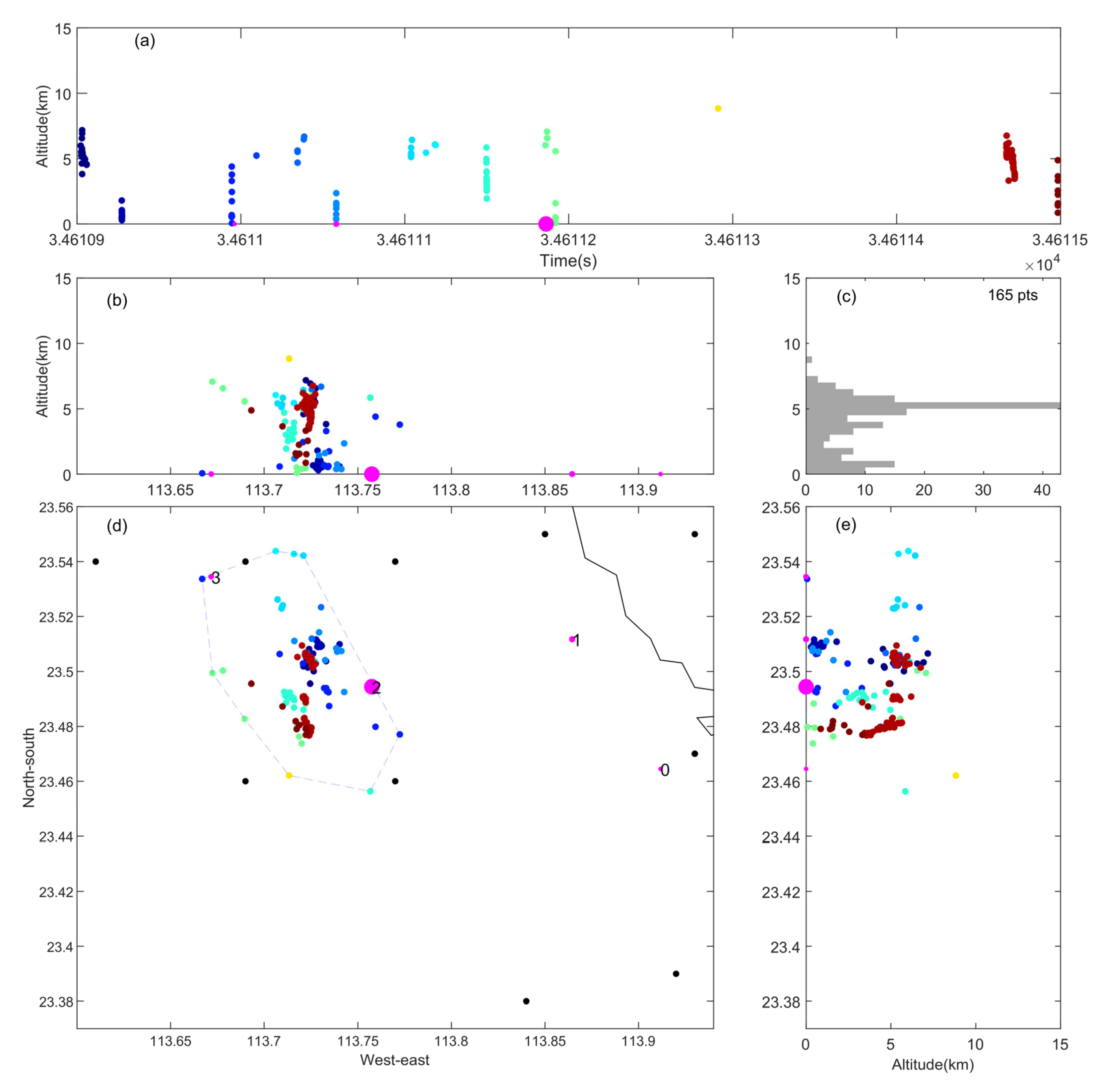
3.1. Methods for the Flash and Group Clustering
3.2. Time-Space Matching Criteria
3.3. Matching Method between LMI_F and LFEDA_F
3.4. Matching Method between LMI_G and LFEDA_G
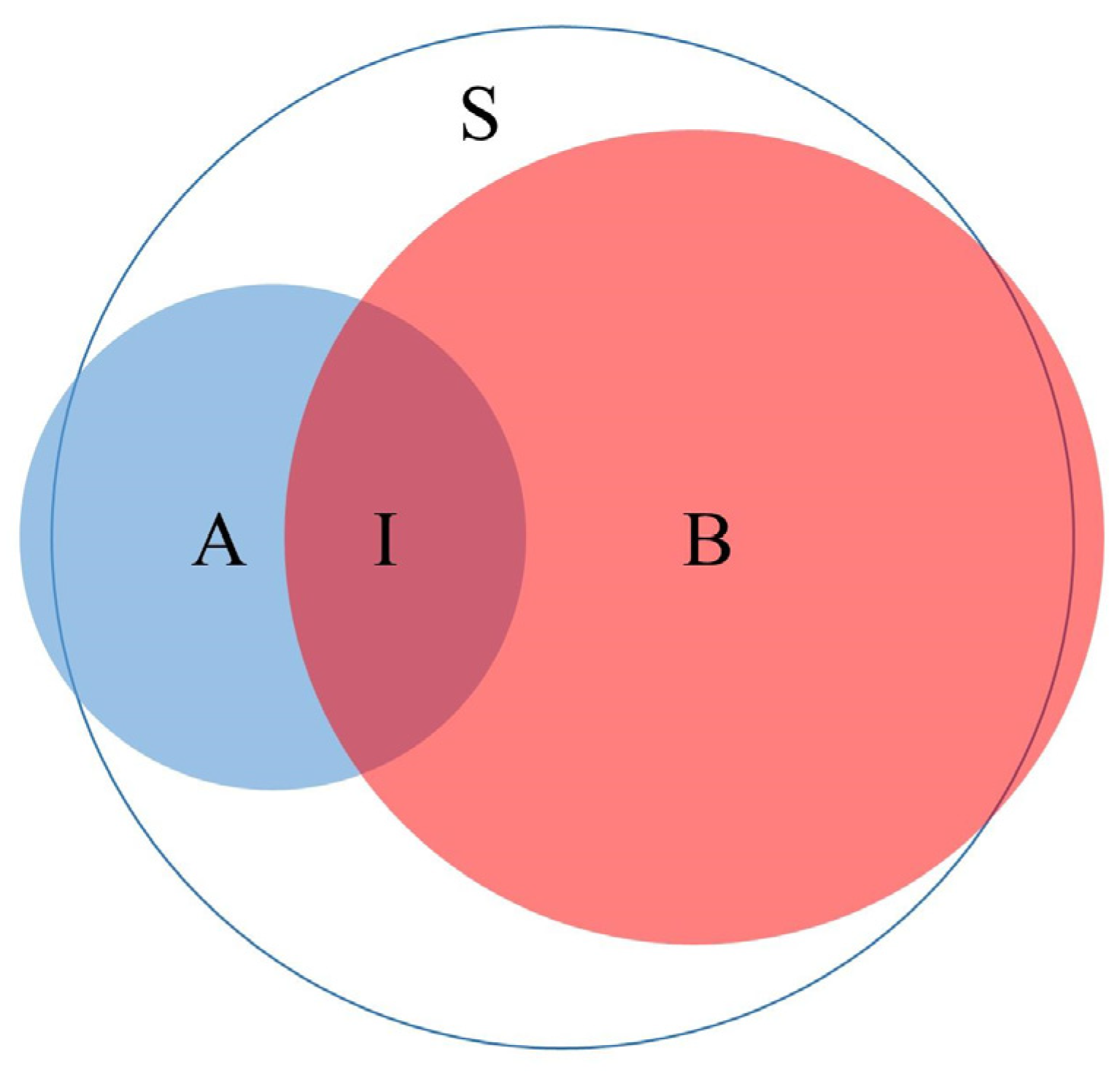
3.5. Detection Efficiency
4. Assessment Results
4.1. The Systematic Bias of LMI
4.2. Performance Evaluation of LMI
4.2.1. Evaluation of Detection Efficiency in ‘Flash’ and ‘Group’
4.2.2. Assessment of Detection Accuracy
5. Conclusions and Discussion
- There was a systematic bias in the data detected via LMI. The time bias was around −0.946 s, the longitude bias was about −0.0817° and the latitude bias was about −0.0245°.
- The relative detection efficiency of LMI at the flash level was 17.6%, while the estimated detection efficiency was 16.5%. The relative detection efficiency of LMI at the group level was 9.8% and the estimated detection efficiency was 9.4%. The detection efficiency of LMI for both flash and group at nighttime was significantly better than its detection efficiency during the daytime. The relative detection efficiency and the estimated detection efficiency for flash achieved 26.5% and 24.0% at nighttime, whereas it was 14.4% and 13.7% during the daytime. The relative detection efficiency of LMI at the group level was 16.2% and the estimated detection efficiency was 14.9% at nighttime, while they were only 7.4% and 7.2% during the daytime, respectively.
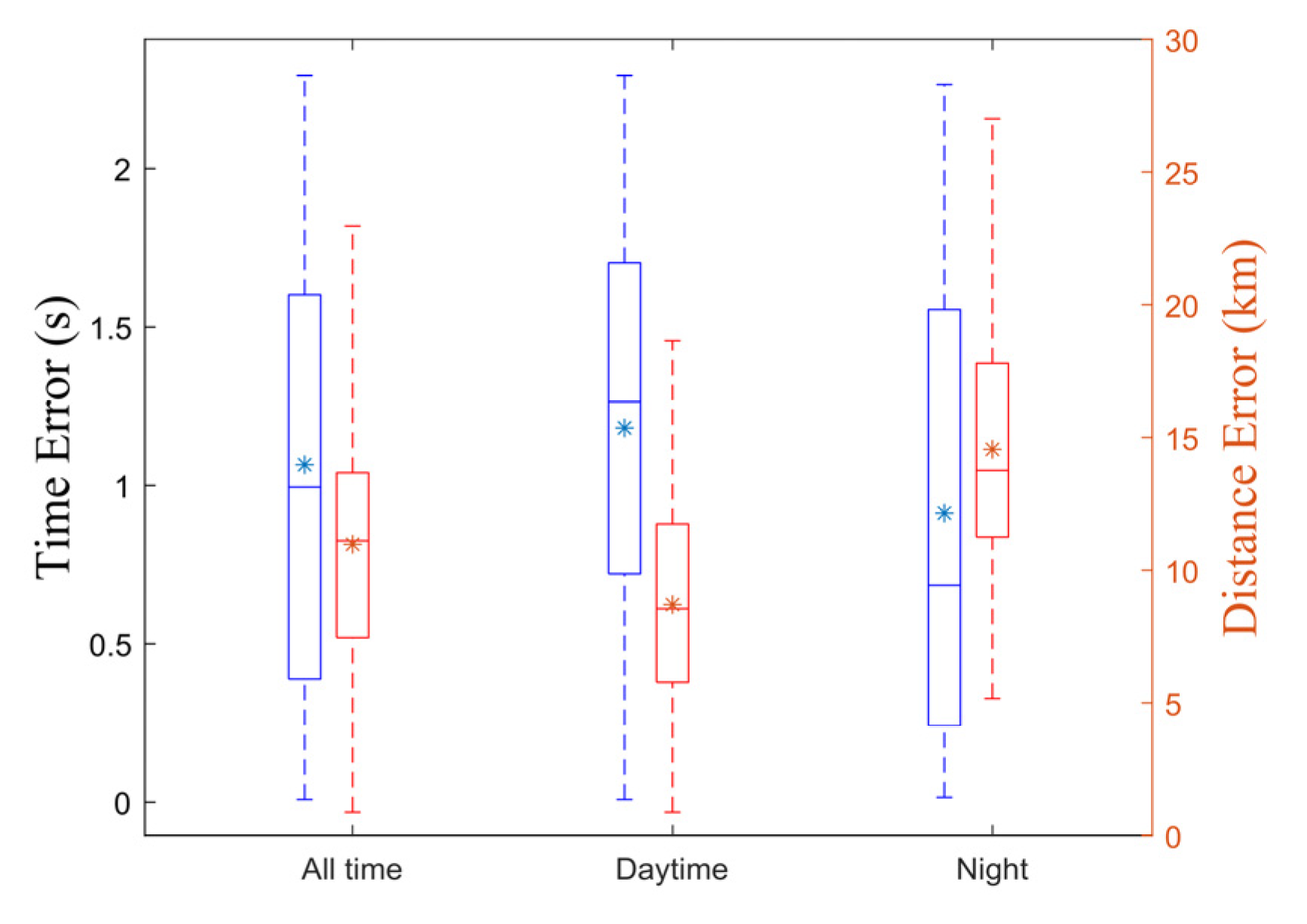
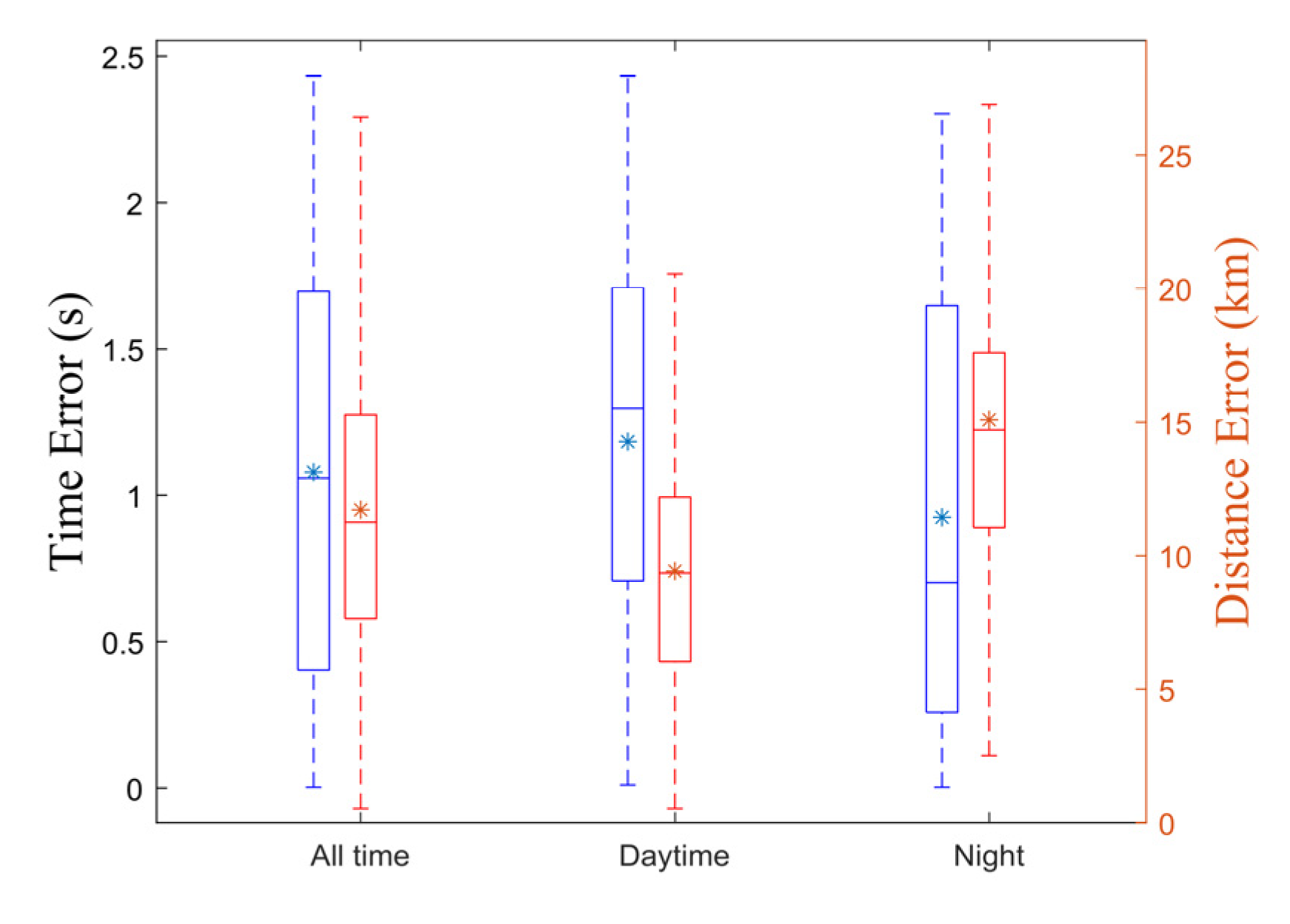
- After removing the systematic biases, the mean (median) errors in the time and distance at the flash level were 0.647 s (0.647 s) and 6.09 km (5.02 km), respectively. The mean (median) detection errors of time and distance at the group level were 0.674 s (0.660 s) and 7.19 km (6.54 km), respectively. Before the systematic biases adjustment, the mean (median) time error of LMI_Fs was 1.065 s (0.994 s), and the distance error was 10.98 km (11.11 km). The mean (median) time and distance errors of LMI_Gs were 1.079 s (1.059 s) and 11.72 km (11.25 km), respectively.
- There was a significant difference in the detection accuracy of LMI during the daytime and at nighttime. When the systematic biases were removed, the mean (median) time and distance errors of LMI_Fs were 0.599 s (0.577 s) and 5.54 km (4.60 km), respectively. The corresponding values were 0.710 s (0.727 s) and 7.17 km (6.20 km) at nighttime. The values of LMI_Gs were 0.609 s (0.558 s) and 6.53 km (5.68 km) during the daytime, while the values were 0.760 s (0.865 s) and 8.10 km (7.23 km) at nighttime. Before correcting the systematic biases, the mean (median) time and distance errors of the LMI_Fs were 1.181 s (1.263 s) and 8.71 km (8.55 km) during the daytime, while the LMI_Gs were 1.183 s (1.297 s) and 9.42 km (9.35 km). During the nighttime, the mean (median) time and distance errors of the LMI_Fs were 0.912 s (0.684 s) and 14.56 km (13.76 km), while for the LMI_Gs, they were 0.925 s (0.702 s) and 15.09 km (14.71 km). The spatial accuracy was always better during the daytime than at nighttime, regardless of whether the systematic biases were removed or not.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Wang, J.; Zheng, D.; Lyu, W.; Zhang, Y.; Fan, Y.; Fan, X.; Yao, W. Progress of Observation and Study on CMA_FEBLS Low Frequency Three-Dimensional Total Lightning Flash Detection Technology in the Last Decade. J. Trop. Meteorol. 2021, 37, 298–308. [Google Scholar] [CrossRef]
- Wacker, R.S.; Orville, R.E. Changes in Measured Lightning Flash Count and Return Stroke Peak Current after the 1994 U.S. National Lightning Detection Network Upgrade: 1. Observations. J. Geophys. Res. 1999, 104, 2151–2157. [Google Scholar] [CrossRef]
- Cummins, K.L.; Murphy, M.J. An Overview of Lightning Locating Systems: History, Techniques, and Data Uses, with an In-Depth Look at the U.S. NLDN. IEEE Trans. Electromagn. Compat. 2009, 51, 499–518. [Google Scholar] [CrossRef]
- Rison, W.; Thomas, R.J.; Krehbiel, P.R.; Hamlin, T.; Harlin, J. A GPS-Based Three-Dimensional Lightning Mapping System: Initial Observations in Central New Mexico. Geophys. Res. Lett. 1999, 26, 3573–3576. [Google Scholar] [CrossRef]
- Stock, M.G.; Akita, M.; Krehbiel, P.R.; Rison, W.; Edens, H.E.; Kawasaki, Z.; Stanley, M.A. Continuous Broadband Digital Interferometry of Lightning Using a Generalized Cross-Correlation Algorithm. J. Geophys. Res. Atmos. 2014, 119, 3134–3165. [Google Scholar] [CrossRef]
- Mach, D.M.; Christian, H.J.; Blakeslee, R.J.; Boccippio, D.J.; Goodman, S.J.; Boeck, W.L. Performance Assessment of the Optical Transient Detector and Lightning Imaging Sensor. J. Geophys. Res. 2007, 112, 2006JD007787. [Google Scholar] [CrossRef]
- Boccippio, D.J.; Koshak, W.; Blakeslee, R.; Driscoll, K.; Mach, D.; Buechler, D.; Boeck, W.; Christian, H.J.; Goodman, S.J. The Optical Transient Detector (OTD): Instrument Characteristics and Cross-Sensor Validation. J. Atmos. Oceanic Technol. 2000, 17, 441–458. [Google Scholar] [CrossRef]
- Goodman, S.J.; Blakeslee, R.J.; Koshak, W.J.; Mach, D.; Bailey, J.; Buechler, D.; Carey, L.; Schultz, C.; Bateman, M.; McCaul, E.; et al. The GOES-R Geostationary Lightning Mapper (GLM). Atmos. Res. 2013, 125–126, 34–49. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, Z.; Wei, C.; Lu, F.; Guo, Q. Introducing the New Generation of Chinese Geostationary Weather Satellites, Fengyun-4. Bull. Am. Meteorol. Soc. 2017, 98, 1637–1658. [Google Scholar] [CrossRef]
- For the First Time over Europe and Africa, the Lightning Imager (LI) Provides Real-Time Data on the Location and Intensity of Lightning Flashes. Available online: https://www.eumetsat.int/mtg-lightning-imager (accessed on 22 November 2023).
- Holmlund, K.; Grandell, J.; Schmetz, J.; Stuhlmann, R.; Bojkov, B.; Munro, R.; Lekouara, M.; Coppens, D.; Viticchie, B.; August, T.; et al. Meteosat Third Generation (MTG): Continuation and Innovation of Observations from Geostationary Orbit. Bull. Am. Meteorol. Soc. 2021, 102, E990–E1015. [Google Scholar] [CrossRef]
- Hui, W.; Zhang, W.; Lyu, W.; Li, P. Preliminary Observations from the China Fengyun-4A Lightning Mapping Imager and Its Optical Radiation Characteristics. Remote Sens. 2020, 12, 2622. [Google Scholar] [CrossRef]
- Zhang, W.; Hui, W.; Lyu, W.; Cao, D.; Li, P.; Zheng, D.; Fang, X.; Zhang, Y. FY-4A LMI Observed Lightning Activity in Super Typhoon Mangkhut (2018) in Comparison with WWLLN Data. J. Meteorol. Res. 2020, 34, 336–352. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, H.; Li, Z.; Wang, Z. A Verification of the Lightning Detection Data from FY-4A LMI as Compared with ADTD-2. Atmos. Res. 2021, 248, 105163. [Google Scholar] [CrossRef]
- Chen, Z.; Qie, X.; Sun, J.; Xiao, X.; Zhang, Y.; Cao, D.; Yang, J. Evaluation of Fengyun-4A Lightning Mapping Imager (LMI) Performance during Multiple Convective Episodes over Beijing. Remote Sens. 2021, 13, 1746. [Google Scholar] [CrossRef]
- Li, P.; Zhai, G.; Pang, W.; Hui, W.; Zhang, W.; Chen, J.; Zhang, L. Preliminary Research on a Comparison and Evaluation of FY-4A LMI and ADTD Data through a Moving Amplification Matching Algorithm. Remote Sens. 2020, 13, 11. [Google Scholar] [CrossRef]
- Chen, Y. Research and Application of Clustering Algorithm for FY-4A Lightning Mapping Imager. Master’s Thesis, Nanjing University of Information Science and Technology, Nanjing, China, 2019. [Google Scholar]
- Shi, D.; Zheng, D.; Zhang, Y.; Zhang, Y.; Huang, Z.; Lu, W.; Chen, S.; Yan, X. Low-Frequency E-Field Detection Array (LFEDA)—Construction and Preliminary Results. Sci. China Earth Sci. 2017, 60, 1896–1908. [Google Scholar] [CrossRef]
- Mach, D.M. Geostationary Lightning Mapper Clustering Algorithm Stability. JGR Atmos. 2020, 125, e2019JD031900. [Google Scholar] [CrossRef]
- Shi, D. Lightning Location Based on Low-Frequency Electric Fieldpulse and Relationship between Lightning Initiation Andthunderstorm Structure. Master’s Thesis, Nanjing University of Information Science and Technology, Nanjing, China, 2017. [Google Scholar]
- Chen, S.M.; Fan, L.M.; He, H.M.; Zhong, D.Z. Evaluation of the Guang Dong Lightning Location System with Transmission Line Fault Data. IEE Proc. Sci. Meas. Technol. 2002, 149, 9–16. [Google Scholar] [CrossRef]
- Chen, L.; Zhang, Y.; Lu, W.; Zheng, D.; Zhang, Y.; Chen, S.; Huang, Z. Performance Evaluation for a Lightning Location System Based on Observations of Artificially Triggered Lightning and Natural Lightning Flashes. J. Atmos. Ocean. Technol. 2012, 29, 1835–1844. [Google Scholar] [CrossRef]
- Zhang, D. Inter-Comparison of Space- and Groud-Dased Observation of Lightning. Ph.D. Thesis, The University of Arizona, Tucson, AZ, USA, 2019. [Google Scholar]
- MacGorman, D.R.; Rust, W.D.; Schuur, T.J.; Biggerstaff, M.I.; Straka, J.M.; Ziegler, C.L.; Mansell, E.R.; Bruning, E.C.; Kuhlman, K.M.; Lund, N.R.; et al. TELEX The Thunderstorm Electrification and Lightning Experiment. Bull. Amer. Meteor. Soc. 2008, 89, 997–1014. [Google Scholar] [CrossRef]
- Zhang, D.; Cummins, K.L.; Bitzer, P.; Koshak, W.J. Evaluation of the Performance Characteristics of the Lightning Imaging Sensor. J. Atmos. Ocean. Technol. 2019, 36, 1015–1031. [Google Scholar] [CrossRef]
- Zhang, D.; Cummins, K.L.; Nag, A.; Murphy, M.; Bitzer, P. Evaluation of the National Lightning Detection Network Upgrade Using the Lightning Imaging Sensor. In Proceedings of the 24th International Lighting Detection Conference & 6th International Lighting Meteorology Conference, San Diego, CA, USA, 18–21 April 2016. [Google Scholar]
- Zhang, D.; Cummins, K.L. Time Evolution of Satellite-Based Optical Properties in Lightning Flashes, and Its Impact on GLM Flash Detection. J. Geophys. Res. Atmos. 2020, 125, e2019JD032024. [Google Scholar] [CrossRef]
- Rubinstein, M. On the Estimation of the Stroke Detection Efficiency by Comparison of Adjacent Lightning Location Systems. In Proceedings of the 22nd International Conference on Lightning Protection (ICLP), Budapest, Hungary, 19–23 September 1994. [Google Scholar]
- Bitzer, P.M.; Burchfield, J.C.; Christian, H.J. A Bayesian Approach to Assess the Performance of Lightning Detection Systems. J. Atmos. Ocean. Technol. 2016, 33, 563–578. [Google Scholar] [CrossRef]
- Bitzer, P.M.; Burchfield, J.C. Bayesian Techniques to Analyze and Merge Lightning Locating System Data. Geophys. Res. Lett. 2016, 43, 12–605. [Google Scholar] [CrossRef]
- Virts, K.S.; Koshak, W.J. Mitigation of Geostationary Lightning Mapper Geolocation Errors. J. Atmos. Ocean. Technol. 2020, 37, 1725–1736. [Google Scholar] [CrossRef]
- Cao, D.; Lu, F.; Zhang, X.; Yang, J. Lightning Activity Observed by the FengYun-4A Lightning Mapping Imager. Remote Sens. 2021, 13, 3013. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| LMI | LFEDA | Coincident Data | |
|---|---|---|---|
| Flash | 217 | 1234 | 133 |
| Group | 782 | 7916 | 368 |
| Daytime | Nighttime | |||||
|---|---|---|---|---|---|---|
| LMI | LFEDA | Coincident Data | LMI | LFEDA | Coincident Data | |
| Flash | 131 | 911 | 83 | 86 | 323 | 50 |
| Group | 428 | 7541 | 219 | 354 | 2175 | 149 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zou, M.; Zhang, Y.; Fan, Y.; Wang, J.; Zhang, H. Performance Evaluation of LMI Based on Low-Frequency Three-Dimensional Total Lightning Flash Location Data. Remote Sens. 2024, 16, 244. https://doi.org/10.3390/rs16020244
Zou M, Zhang Y, Fan Y, Wang J, Zhang H. Performance Evaluation of LMI Based on Low-Frequency Three-Dimensional Total Lightning Flash Location Data. Remote Sensing. 2024; 16(2):244. https://doi.org/10.3390/rs16020244
Chicago/Turabian StyleZou, Mengjin, Yang Zhang, Yanfeng Fan, Jingxuan Wang, and Huiyi Zhang. 2024. "Performance Evaluation of LMI Based on Low-Frequency Three-Dimensional Total Lightning Flash Location Data" Remote Sensing 16, no. 2: 244. https://doi.org/10.3390/rs16020244