
Evaluation of Linear Kernel-Driven BRDF Models over Snow-Free Rugged Terrain
 ,
,
Abstract
:1. Introduction
2. Model Development
2.1. RTLSR Kernel-Driven Model
2.2. TCKD Model
2.3. KDST-TCKD Model
3. Materials and Methods
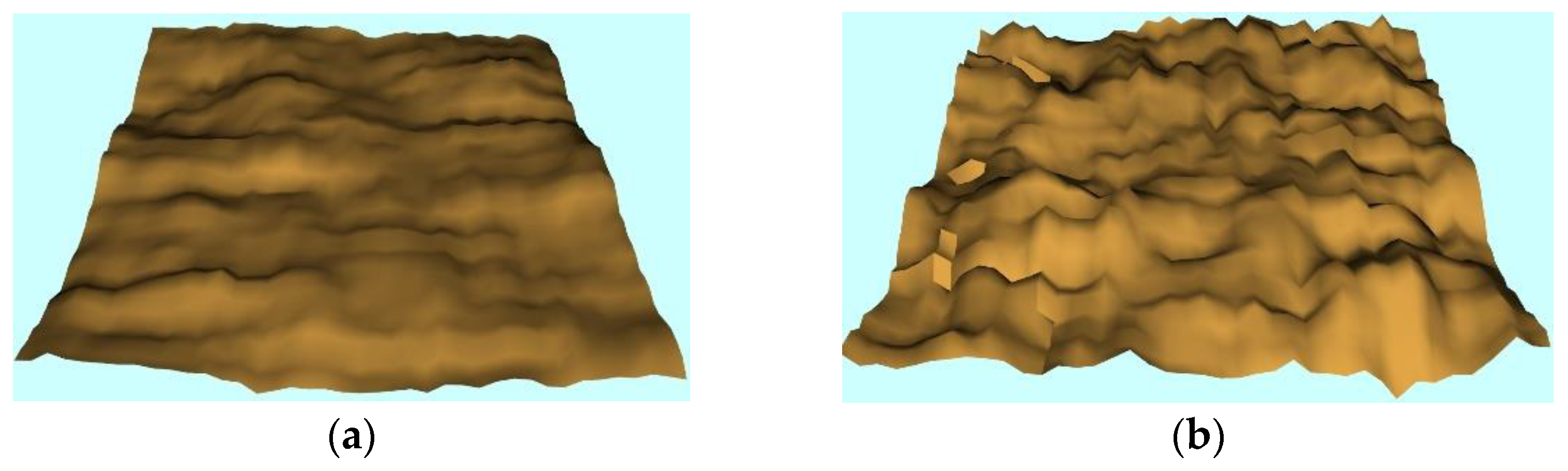
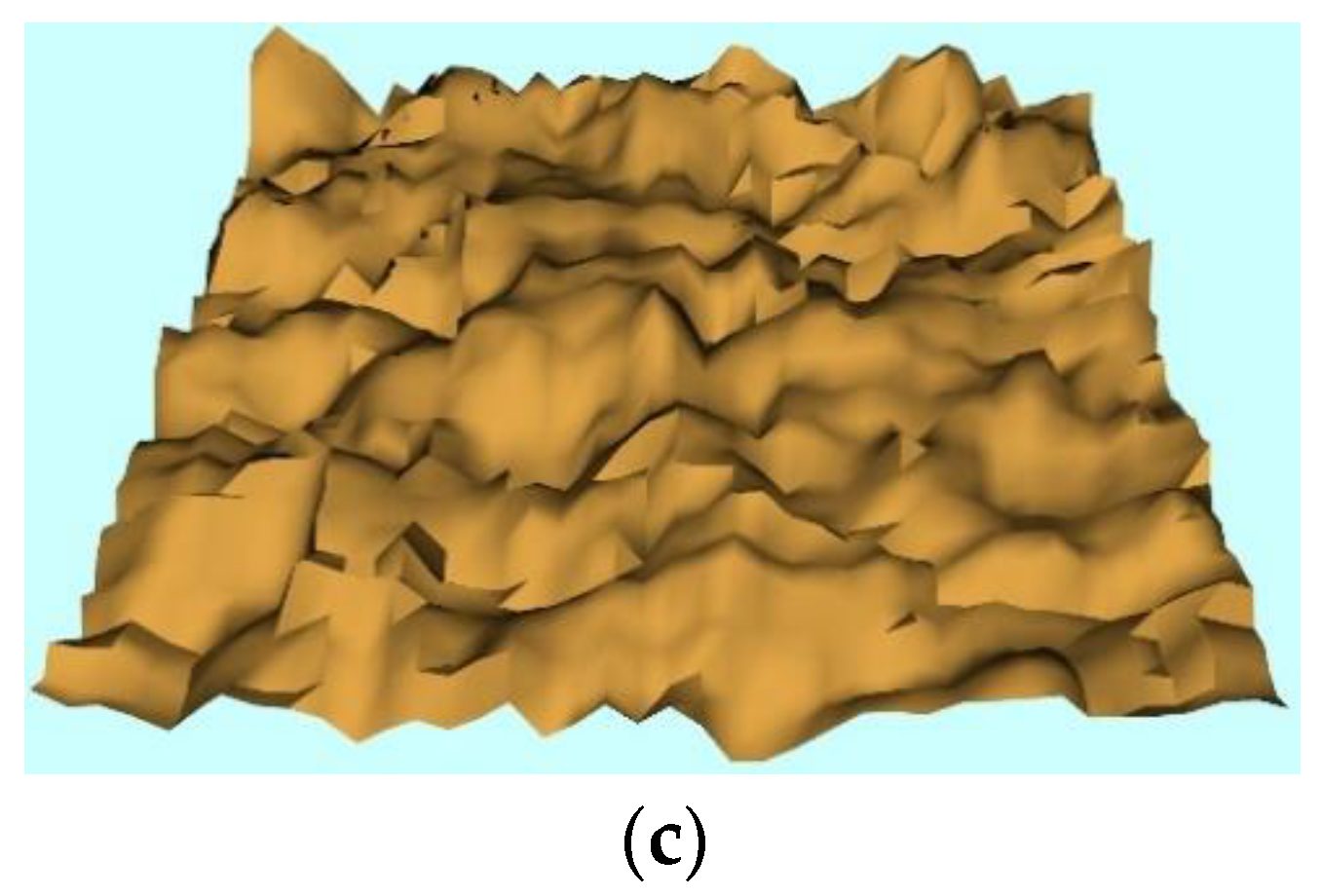
3.1. Simulated Multi-Angle Reflectance of Rough Terrain with 3-D LESS
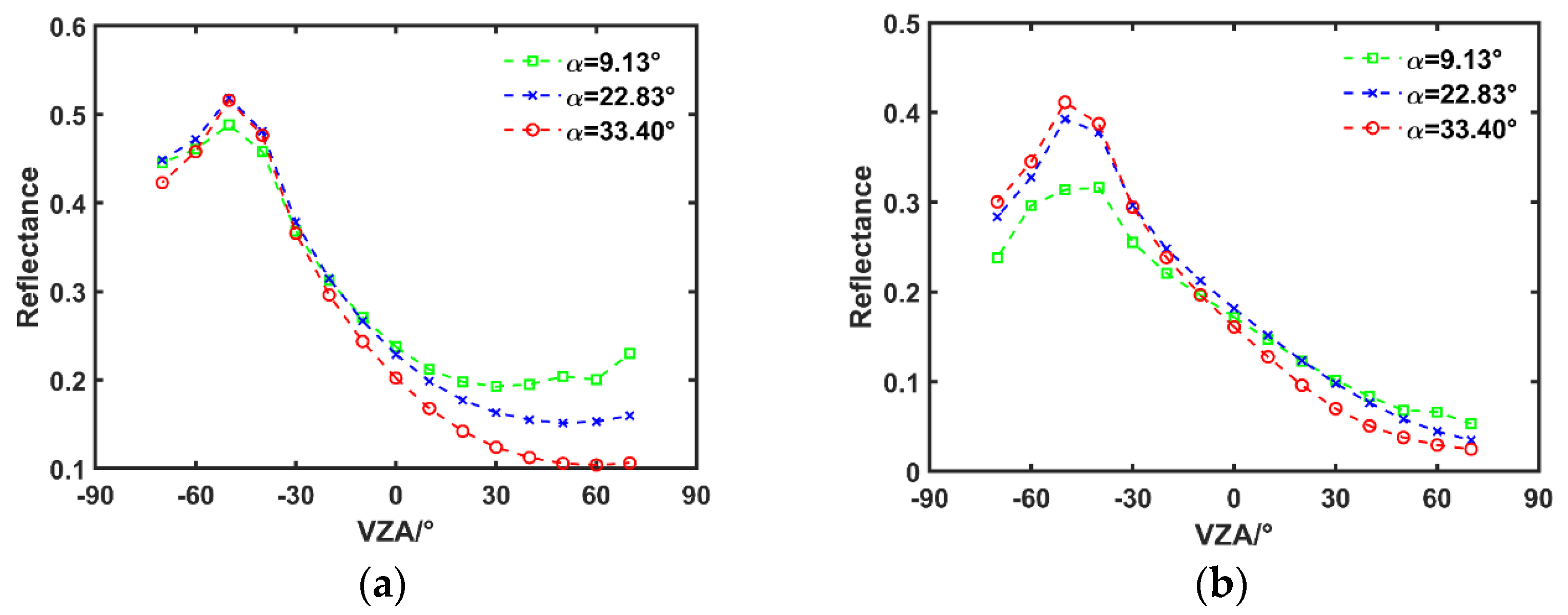
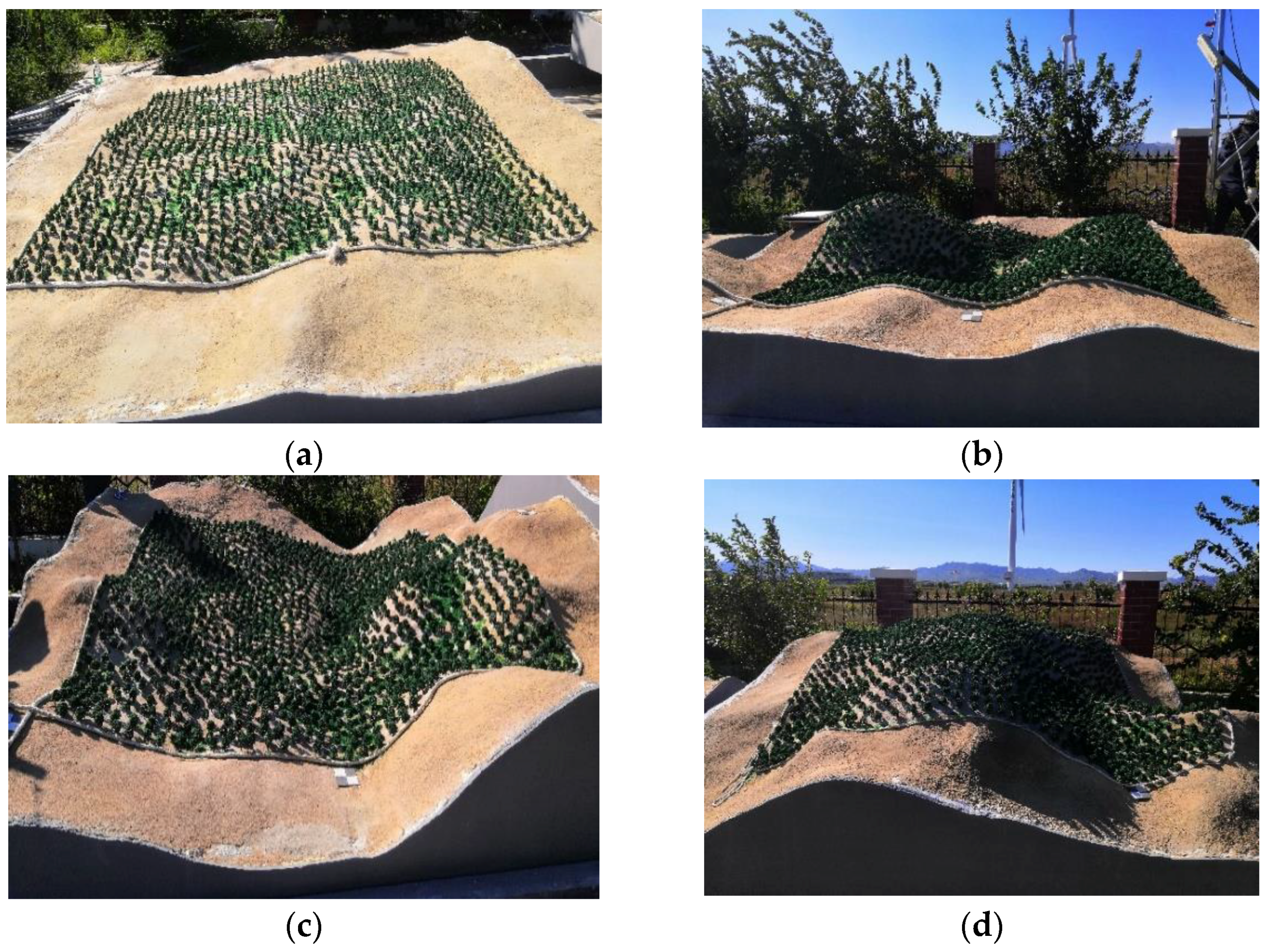
3.2. Multi-Angle Reflectance Data from the Terrain Sandbox
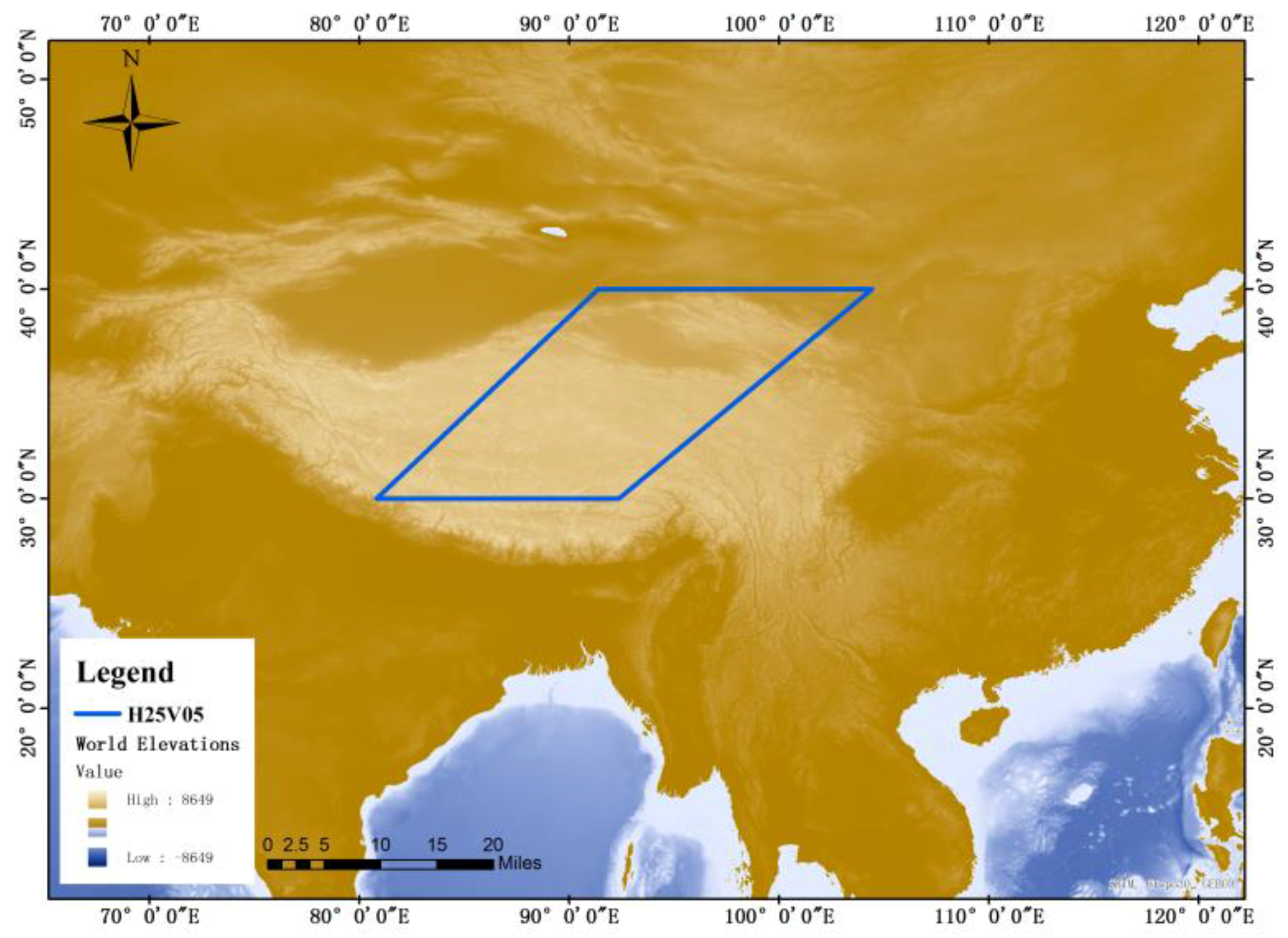
3.3. MODIS Satellite Observations
3.4. Evaluation Methods
4. Result
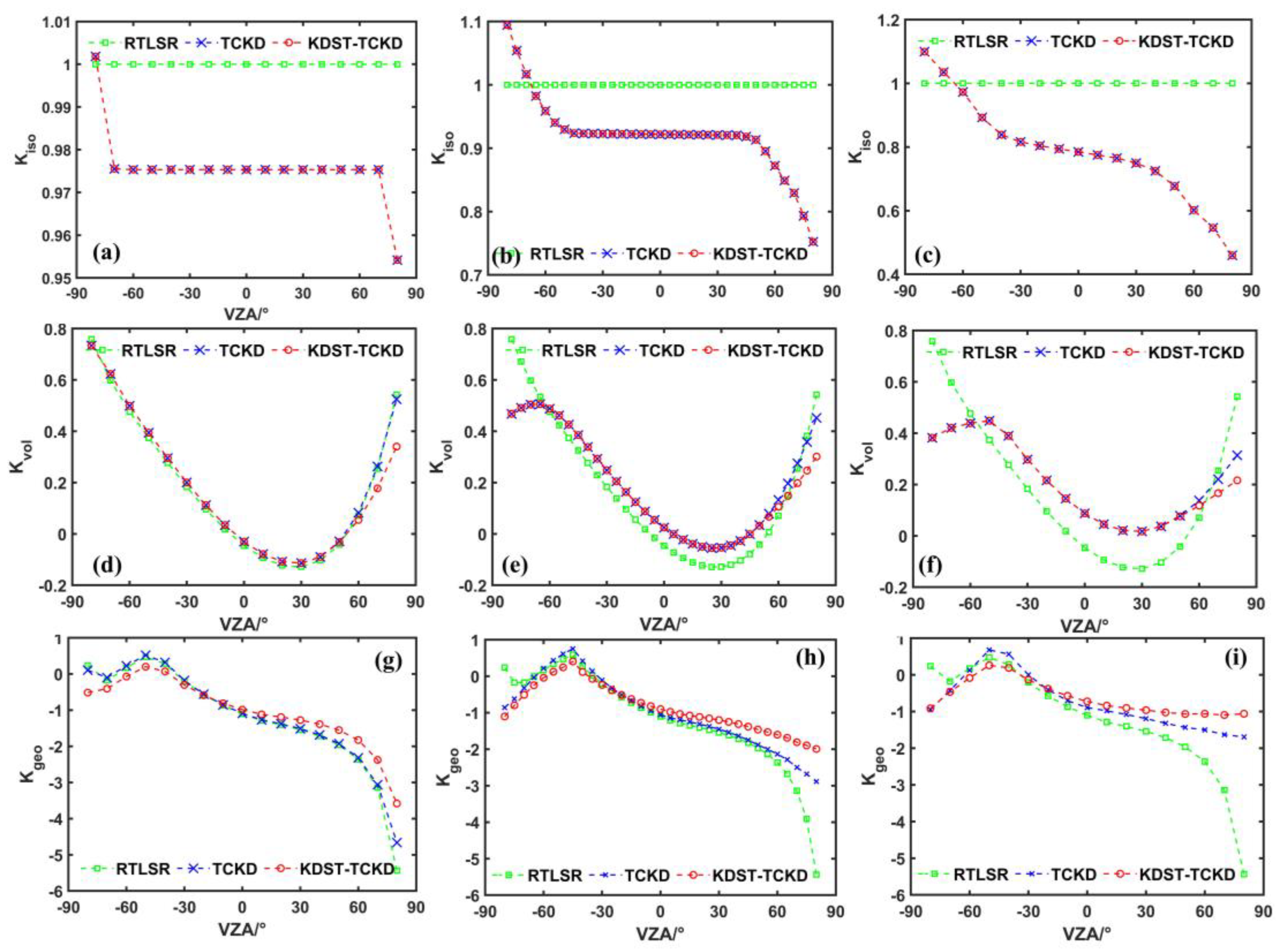
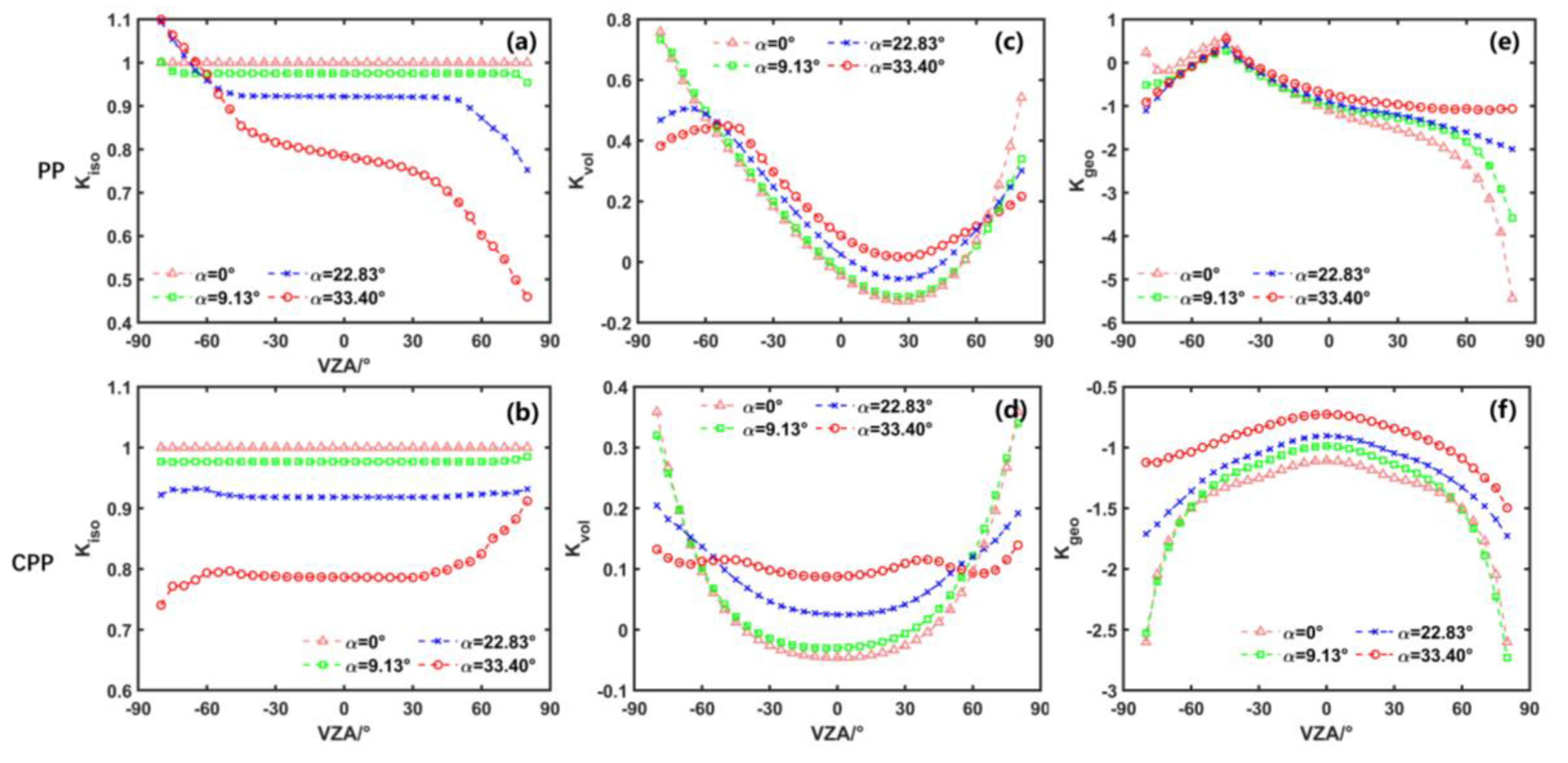
4.1. Evaluation of Kernel Shapes
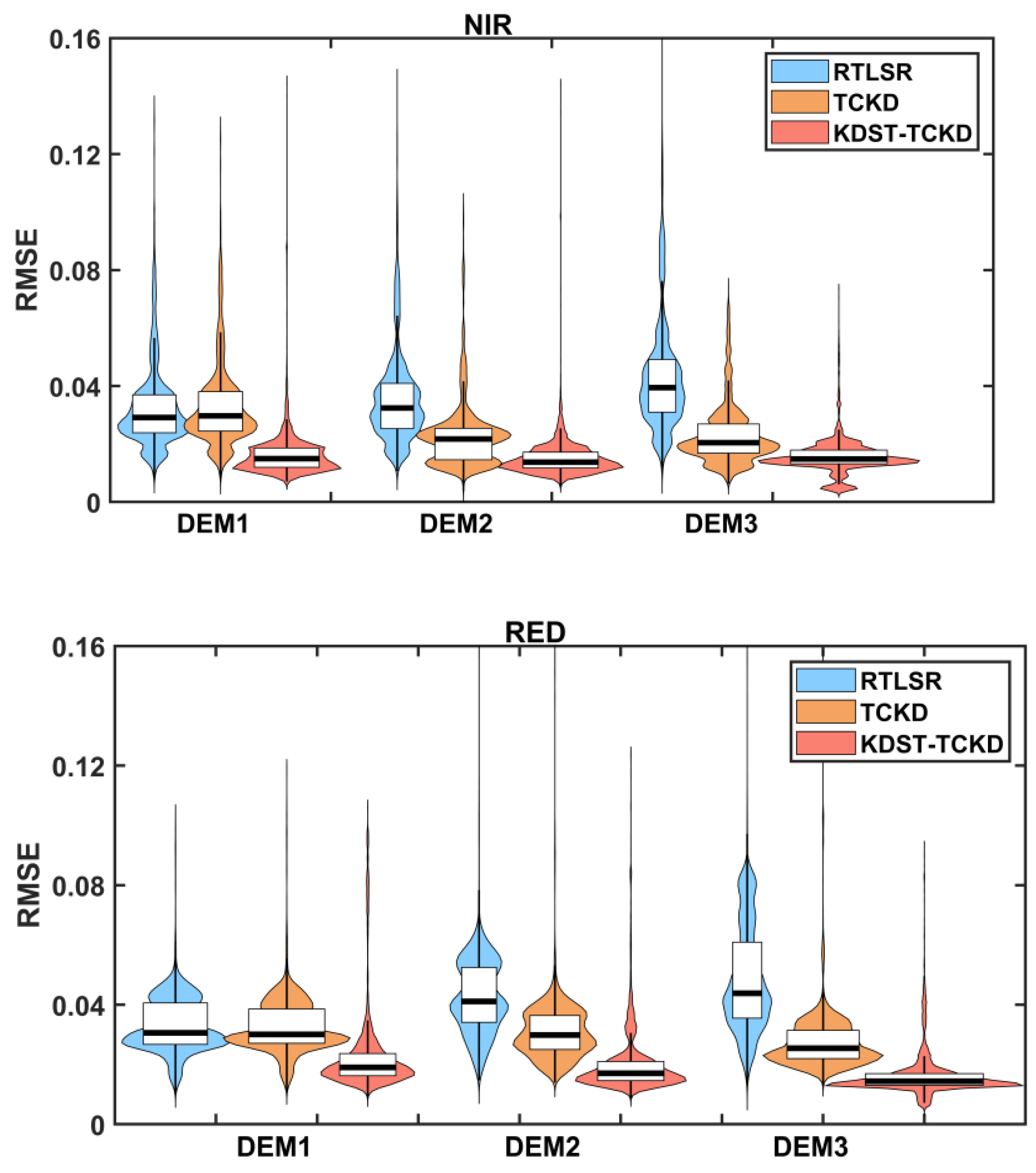
4.2. Model Comparisons with 3-D LESS Simulations
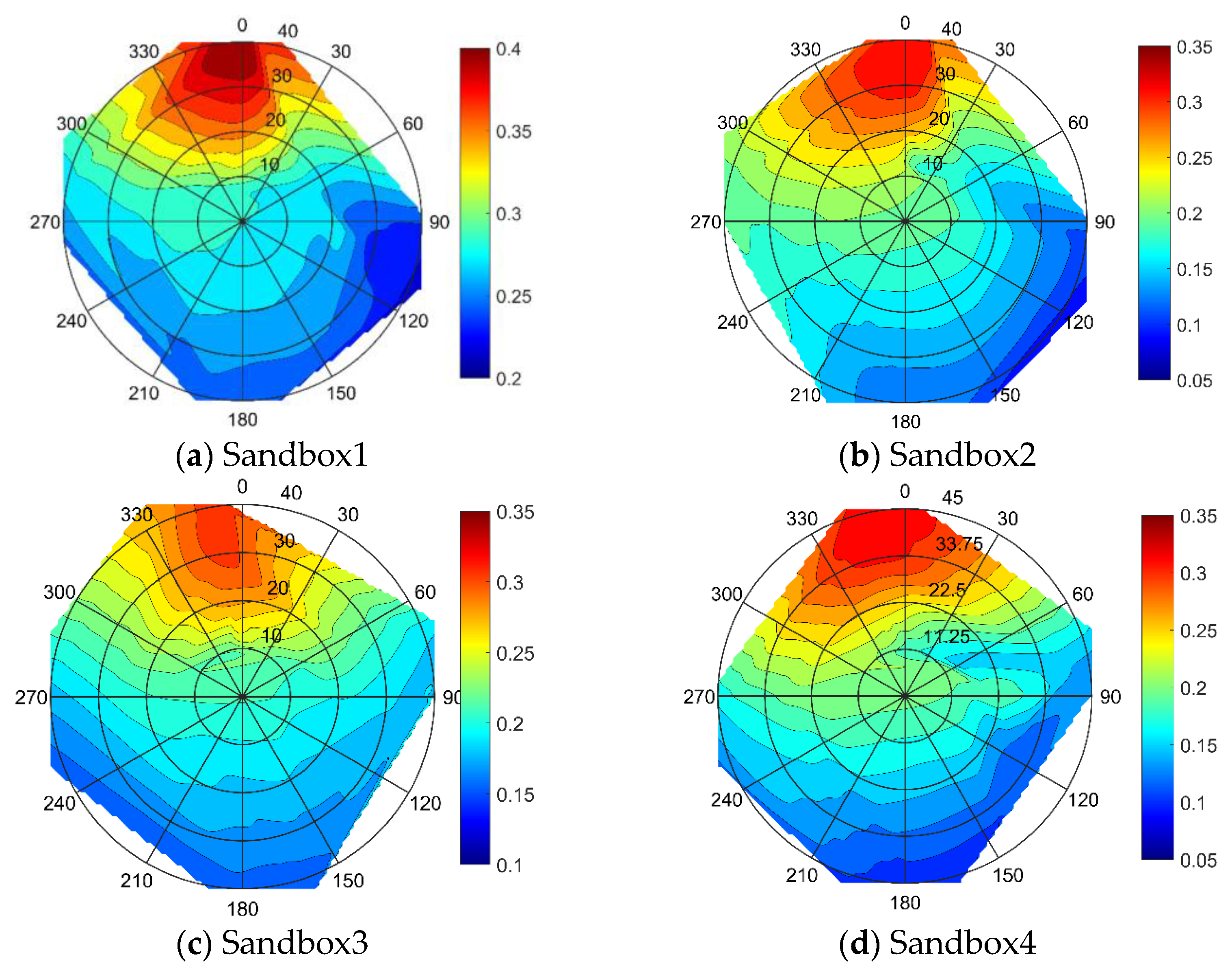
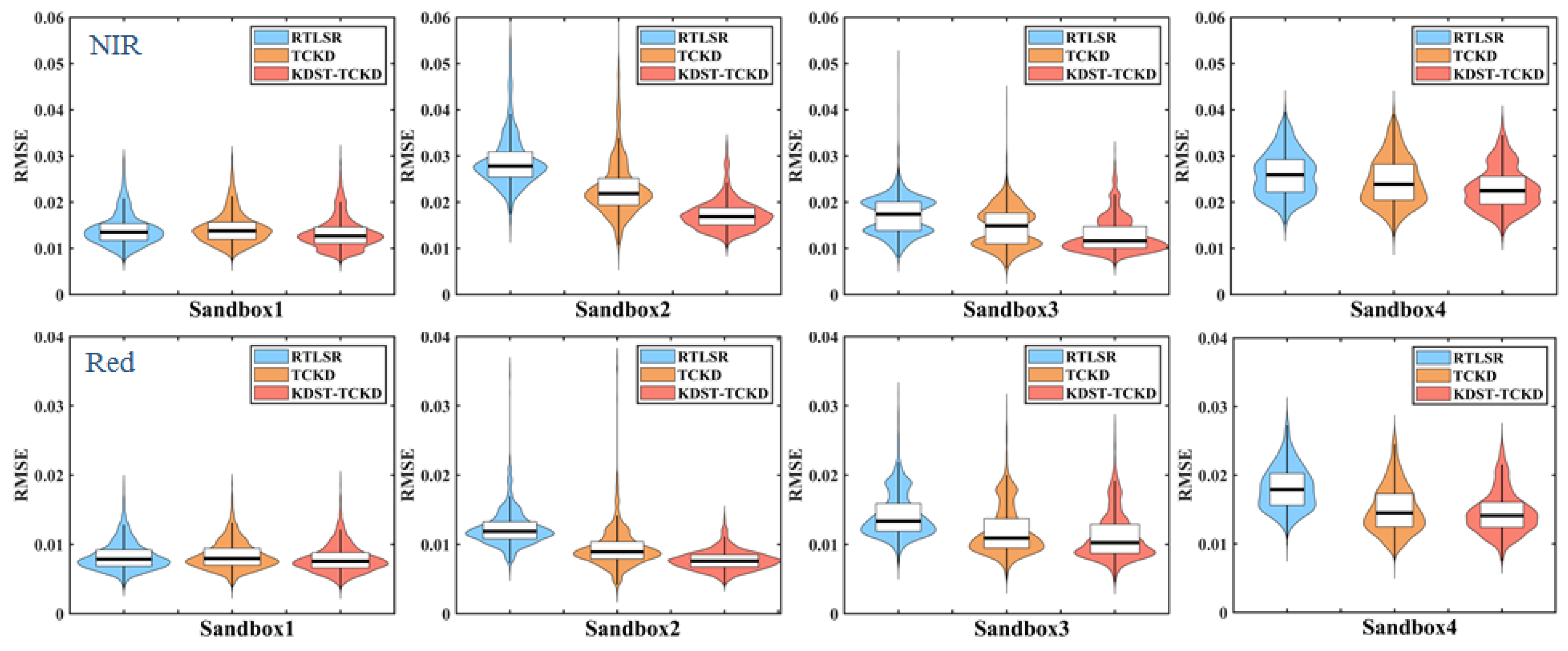
4.3. Model Comparisons with Sandbox Measurements
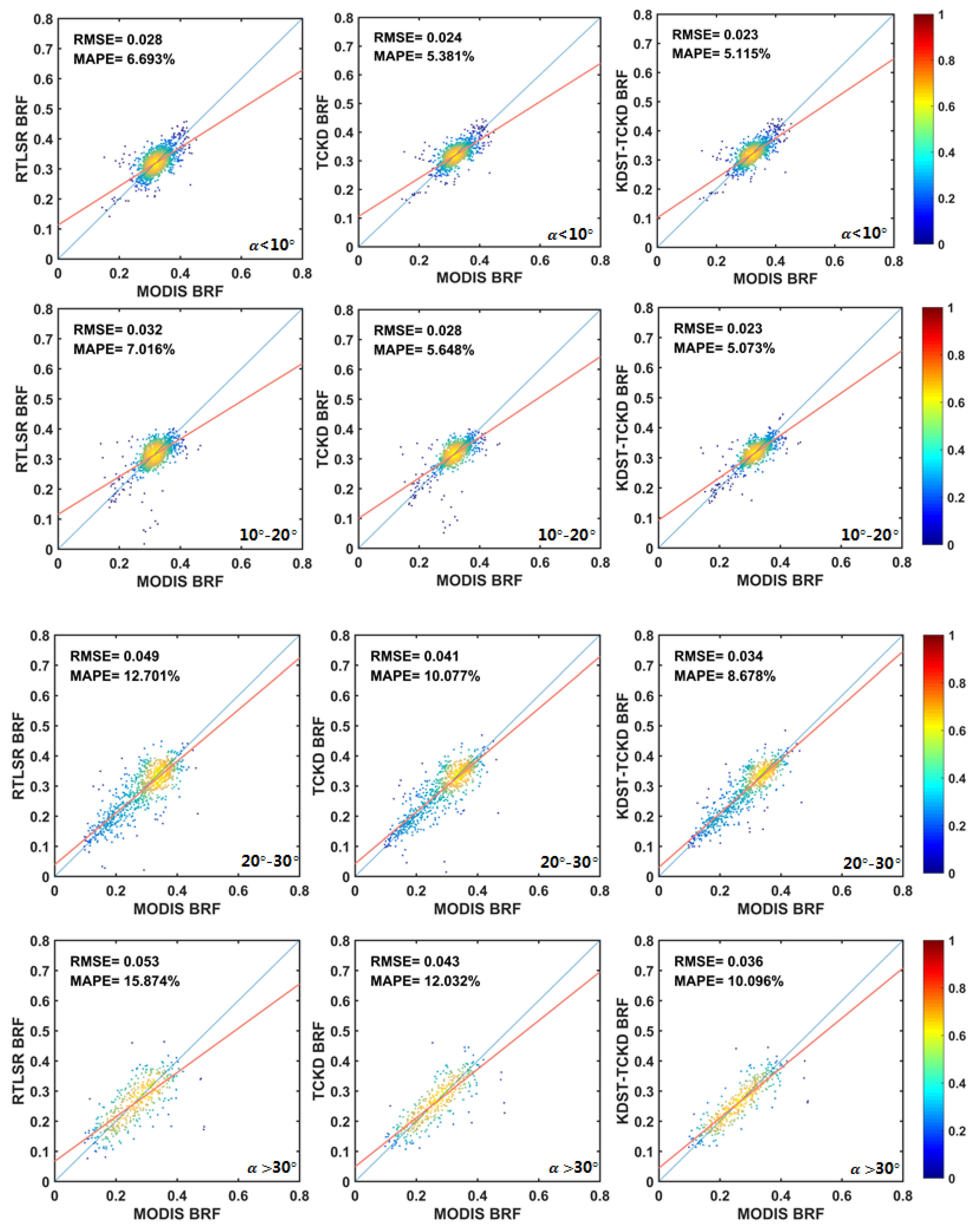
4.4. Model Comparisons with MODIS Observations
5. Discussion and Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Roujean, J.; Leroy, M.; Deschamps, P.; Podaire, A. A surface bidirectional reflectance model to be used for the correction of directional effects in remote sensing multitemporal data sets. In Proceedings of the 10th Annual International Symposium on Geoscience and Remote Sensing, College Park, MD, USA, 20–24 May 1990; pp. 1785–1789. [Google Scholar]
- Schaaf, C.B.; Gao, F.; Strahler, A.H.; Lucht, W.; Li, X.W.; Tsang, T.; Strugnell, N.C.; Zhang, X.Y.; Jin, Y.F.; Muller, J.P.; et al. First operational BRDF, albedo nadir reflectance products from MODIS. Remote Sens. Environ. 2002, 83, 135–148. [Google Scholar] [CrossRef] [Green Version]
- Wen, J.G.; Dou, B.C.; You, D.Q.; Tang, Y.; Xiao, Q.; Liu, Q.; Qinhuo, L. Forward a Small-Timescale BRDF/Albedo by Multisensor Combined BRDF Inversion Model. IEEE Trans. Geosci. Remote Sens. 2017, 55, 683–697. [Google Scholar] [CrossRef]
- Yan, G.J.; Wang, T.X.; Jiao, Z.H.; Mu, X.H.; Zhao, J.; Chen, L. Topographic radiation modeling and spatial scaling of clear-sky land surface longwave radiation over rugged terrain. Remote Sens. Environ. 2016, 172, 15–27. [Google Scholar] [CrossRef]
- Qu, Y.; Liu, Q.; Liang, S.; Wang, L.; Liu, N.; Liu, S. Direct-Estimation Algorithm for Mapping Daily Land-Surface Broadband Albedo From MODIS Data. IEEE Trans. Geosci. Remote Sens. 2013, 52, 907–919. [Google Scholar] [CrossRef]
- Pasolli, L.; Asam, S.; Castelli, M.; Bruzzone, L.; Wohlfahrt, G.; Zebisch, M.; Notarnicola, C. Retrieval of Leaf Area Index in mountain grasslands in the Alps from MODIS satellite imagery. Remote Sens. Environ. 2015, 165, 159–174. [Google Scholar] [CrossRef]
- Zhao, P.; Fan, W.J.; Liu, Y.; Mu, X.H.; Xu, X.R.; Peng, J.J. Study of the Remote Sensing Model of FAPAR over Rugged Terrains. Remote Sens. 2016, 8, 309. [Google Scholar] [CrossRef] [Green Version]
- Vanonckelen, S.; Lhermitte, S.; Van Rompaey, A. The effect of atmospheric and topographic correction methods on land cover classification accuracy. Int. J. Appl. Earth Obs. Geoinf. 2013, 24, 9–21. [Google Scholar] [CrossRef] [Green Version]
- Wen, J.G.; Liu, Q.; Tang, Y.; Dou, B.C.; You, D.Q.; Xiao, Q.; Liu, Q.H.; Li, X.W. Modeling Land Surface Reflectance Coupled BRDF for HJ-1/CCD Data of Rugged Terrain in Heihe River Basin, China. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 8, 1506–1518. [Google Scholar] [CrossRef]
- Hao, D.L.; Wen, J.G.; Xiao, Q.; Wu, S.B.; Lin, X.W.; You, D.Q.; Tang, Y. Modeling Anisotropic Reflectance Over Composite Sloping Terrain. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3903–3923. [Google Scholar] [CrossRef]
- Li, F.Q.; Jupp, D.L.B.; Thankappan, M.; Lymburner, L.; Mueller, N.; Lewis, A.; Held, A. A physics-based atmospheric and BRDF correction for Landsat data over mountainous terrain. Remote Sens. Environ. 2012, 124, 756–770. [Google Scholar] [CrossRef]
- Garrigues, S.; Allard, D.; Baret, F.; Weiss, M. Influence of landscape spatial heterogeneity on the non-linear estimation of leaf area index from moderate spatial resolution remote sensing data. Remote Sens. Environ. 2006, 105, 286–298. [Google Scholar] [CrossRef]
- Hao, D.L.; Wen, J.G.; Xiao, Q.; Lin, X.W.; You, D.Q.; Tang, Y.; Liu, Q.; Zhang, S.S. Sensitivity of Coarse-Scale Snow-Free Land Surface Shortwave Albedo to Topography. J. Geophys. Res. Atmos. 2019, 124, 9028–9045. [Google Scholar] [CrossRef]
- Tao, X.; Liang, S.L.; Wang, D.D. Assessment of five global satellite products of fraction of absorbed photosynthetically active radiation: Intercomparison and direct validation against ground-based data. Remote Sens. Environ. 2015, 163, 270–285. [Google Scholar] [CrossRef]
- Yan, G.J.; Jiao, Z.H.; Wang, T.X.; Mu, X.H. Modeling surface longwave radiation over high-relief terrain. Remote Sens. Environ. 2020, 237, 111556. [Google Scholar] [CrossRef]
- Wen, J.G.; Liu, Q.; Xiao, Q.; Liu, Q.H.; You, D.Q.; Hao, D.L.; Wu, S.B.; Lin, X.W. Characterizing Land Surface Anisotropic Reflectance over Rugged Terrain: A Review of Concepts and Recent Developments. Remote Sens. 2018, 10, 370. [Google Scholar] [CrossRef] [Green Version]
- Yin, G.F.; Li, A.N.; Zhao, W.; Jin, H.A.; Bian, J.H.; Wu, S.B.A. Modeling Canopy Reflectance Over Sloping Terrain Based on Path Length Correction. IEEE Trans. Geosci. Remote Sens. 2017, 55, 4597–4609. [Google Scholar] [CrossRef]
- Shi, H.Y.; Xiao, Z.Q. The 4SAILT Model: An Improved 4SAIL Canopy Radiative Transfer Model for Sloping Terrain. IEEE Trans. Geosci. Remote Sens. 2021, 59, 5515–5525. [Google Scholar] [CrossRef]
- Schaaf, C.B.; Li, X.W.; Strahler, A.H. Topographic effects on bidirectional and hemispherical reflectances calculated with a geometric-optical canopy model. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1186–1193. [Google Scholar] [CrossRef]
- Fan, W.L.; Chen, J.M.; Ju, W.M.; Zhu, G.L. GOST: A Geometric-Optical Model for Sloping Terrains. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5469–5482. [Google Scholar] [CrossRef]
- Hu, G.Y.; Li, A.N. SGOT: A Simplified Geometric-Optical Model for Crown Scene Components Modeling over Rugged Terrain. Remote Sens. 2022, 14, 1821. [Google Scholar] [CrossRef]
- Wu, S.B.; Wen, J.G.; Lin, X.W.; Hao, D.L.; You, D.Q.; Xiao, Q.; Liu, Q.H.; Yin, T.G. Modeling Discrete Forest Anisotropic Reflectance Over a Sloped Surface With an Extended GOMS and SAIL Model. IEEE Trans. Geosci. Remote Sens. 2019, 57, 944–957. [Google Scholar] [CrossRef]
- Wen, J.G.; Liu, Q.; Liu, Q.H.; Xiao, Q.; Li, X.W. Scale effect and scale correction of land-surface albedo in rugged terrain. Int. J. Remote Sens. 2009, 30, 5397–5420. [Google Scholar] [CrossRef]
- Shuai, Y.M.; Schaaf, C.B.; Strahler, A.H.; Liu, J.C.; Jiao, Z.T. Quality assessment of BRDF/albedo retrievals in MODIS operational system. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- He, T.; Liang, S.L.; Wang, D.D. Direct Estimation of Land Surface Albedo From Simultaneous MISR Data. IEEE Trans. Geosci. Remote Sens. 2017, 55, 2605–2617. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.; Sun, Q.; Erb, A.M.; Li, Z.; Schaaf, C.B.; Zhang, X.; Roman, M.O.; Scott, R.L.; Zhang, Q.; et al. Evaluation of the VIIRS BRDF, Albedo and NBAR products suite and an assessment of continuity with the long term MODIS record. Remote Sens. Environ. 2017, 201, 256–274. [Google Scholar] [CrossRef]
- Wang, Z.; Schaaf, C.B.; Sun, Q.; Shuai, Y.; Román, M.O. Capturing rapid land surface dynamics with Collection V006 MODIS BRDF/NBAR/Albedo (MCD43) products. Remote Sens. Environ. 2018, 207, 50–64. [Google Scholar] [CrossRef]
- Mousivand, A.; Verhoef, W.; Menenti, M.; Gorte, B. Modeling Top of Atmosphere Radiance over Heterogeneous Non-Lambertian Rugged Terrain. Remote Sens. 2015, 7, 8019–8044. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.B.; Wen, J.G.; Xiao, Q.; Liu, Q.H.; Hao, D.L.; Lin, X.W.; You, D.Q. Derivation of Kernel Functions for Kernel-Driven Reflectance Model Over Sloping Terrain. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 396–409. [Google Scholar] [CrossRef]
- Hao, D.L.; Wen, J.G.; Xiao, Q.; You, D.Q.; Tang, Y. An Improved Topography-Coupled Kernel-Driven Model for Land Surface Anisotropic Reflectance. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2833–2847. [Google Scholar] [CrossRef]
- Wanner, W.; Li, X.; Strahler, A.H. On the derivation of kernels for kernel-driven models of bidirectional reflectance. J. Geophys. Res. Atmos. 1995, 100, 21077–21089. [Google Scholar] [CrossRef]
- Li, X.W.; Strahler, A.H. Geometric-optical bidirectional reflectance modeling of the discrete crown vegetation canopy: Effect of crown shape and mutual shadowing. IEEE Trans. Geosci. Remote Sens. 1992, 30, 276–292. [Google Scholar] [CrossRef]
- Roujean, J.L.; Leroy, M.; Deschamps, P.Y. A bidirectional reflectance model of the Earth’s surface for the correction of remote sensing data. J. Geophys. Res. -Atmos. 1992, 97, 20455–20468. [Google Scholar] [CrossRef] [Green Version]
- Ross, J. The Radiation Regime and Architecture of Plant Stands; Springer: Dordrecht, The Netherlands, 1981. [Google Scholar]
- Qi, J.B.; Xie, D.H.; Yin, T.G.; Yan, G.J.; Gastellu-Etchegorry, J.P.; Li, L.Y.; Zhang, W.M.; Mu, X.H.; Norford, L.K. LESS: LargE-Scale remote sensing data and image simulation framework over heterogeneous 3D scenes. Remote Sens. Environ. 2019, 221, 695–706. [Google Scholar] [CrossRef]
- Jiao, Z.T.; Schaaf, C.B.; Dong, Y.D.; Roman, M.; Hill, M.J.; Chen, J.M.; Wang, Z.S.; Zhang, H.; Saenz, E.; Poudyal, R.; et al. A method for improving hotspot directional signatures in BRDF models used for MODIS. Remote Sens. Environ. 2016, 186, 135–151. [Google Scholar] [CrossRef] [Green Version]
- Combal, B.; Isaka, H.; Trotter, C. Extending a turbid medium BRDF model to allow sloping terrain with a vertical plant stand. IEEE Trans. Geosci. Remote Sens. 2000, 38, 798–810. [Google Scholar] [CrossRef]
- Wen, J.G.; Wu, X.D.; Wang, J.P.; Tang, R.Q.; Ma, D.J.; Zeng, Q.C.; Gong, B.C.; Xiao, Q. Characterizing the Effect of Spatial Heterogeneity and the Deployment of Sampled Plots on the Uncertainty of Ground “Truth” on a Coarse Grid Scale: Case Study for Near-Infrared (NIR) Surface Reflectance. J. Geophys. Res. Atmos. 2022, 127, e2022JD036779. [Google Scholar] [CrossRef]
- Li, H.L.; Yan, K.; Gao, S.; Song, W.J.; Mu, X.H. Revisiting the Performance of the Kernel-Driven BRDF Model Using Filtered High-Quality POLDER Observations. Forests 2022, 13, 435. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Models | DEM1 | DEM2 | DEM3 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| NIR | Red | NIR | Red | NIR | Red | |||||||
| RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | |
| RTLSR | 0.0358 | 7.859% | 0.0342 | 23.791% | 0.0392 | 9.665% | 0.0446 | 39.195% | 0.0471 | 15.7869% | 0.0516 | 61.869% |
| TCKD | 0.0366 | 7.992% | 0.0337 | 23.337% | 0.0257 | 6.245% | 0.0324 | 28.049% | 0.0252 | 8.8421% | 0.0292 | 30.511% |
| KDST-TCKD | 0.0192 | 4.409% | 0.0269 | 17.711% | 0.0167 | 4.522% | 0.0224 | 18.407% | 0.0169 | 5.1521% | 0.0180 | 18.930% |
| Band | Models | Sandbox1 | Sandbox2 | Sandbox3 | Sandbox4 | ||||
|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | ||
| NIR | RTLSR | 0.0147 | 4.198% | 0.0346 | 14.797% | 0.0174 | 5.247% | 0.0265 | 12.343% |
| TCKD | 0.0144 | 4.129% | 0.0298 | 14.002% | 0.0171 | 5.194% | 0.0251 | 11.699% | |
| KDST-TCKD | 0.0137 | 3.878% | 0.0175 | 8.402% | 0.0133 | 4.441% | 0.0234 | 11.111% | |
| Red | RTLSR | 0.0085 | 3.542% | 0.0156 | 18.666% | 0.0126 | 5.495% | 0.0165 | 12.023% |
| TCKD | 0.0086 | 3.582% | 0.0127 | 17.866% | 0.0125 | 5.443% | 0.0154 | 11.297% | |
| KDST-TCKD | 0.0082 | 3.368% | 0.0079 | 11.124% | 0.0116 | 5.167% | 0.0149 | 11.075% | |
| Model | Broad | Needleleaf | Savannas | Shrub | Glasslands | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | ||
| a < 10° | RTLSR | 0.0309 | 6.161% | 0.0601 | 15.405% | 0.0603 | 16.128% | 0.0250 | 5.875% | 0.0300 | 6.261% |
| TCKD | 0.0307 | 6.011% | 0.0600 | 15.285% | 0.0599 | 15.974% | 0.0231 | 5.268% | 0.0293 | 6.057% | |
| KDST-TCKD | 0.0302 | 5.905% | 0.0580 | 14.721% | 0.0589 | 15.679% | 0.0223 | 5.058% | 0.0270 | 5.693% | |
| 10°–20° | RTLSR | 0.0360 | 7.443% | 0.0703 | 18.080% | 0.0682 | 16.792% | 0.0296 | 6.575% | 0.0340 | 7.413% |
| TCKD | 0.0309 | 6.154% | 0.0649 | 16.446% | 0.0692 | 16.296% | 0.0248 | 5.124% | 0.0297 | 6.069% | |
| KDST-TCKD | 0.0286 | 5.667% | 0.0602 | 14.964% | 0.0590 | 14.274% | 0.0202 | 4.641% | 0.0249 | 5.430% | |
| 20°–30° | RTLSR | 0.0421 | 10.684% | 0.0801 | 22.129% | 0.0677 | 17.138% | 0.0569 | 15.719% | 0.0396 | 9.480% |
| TCKD | 0.0287 | 6.485% | 0.0691 | 18.817% | 0.0613 | 15.924% | 0.0465 | 12.289% | 0.0332 | 7.581% | |
| KDST-TCKD | 0.0218 | 5.112% | 0.0633 | 17.360% | 0.0575 | 14.952% | 0.0377 | 10.518% | 0.0300 | 6.825% | |
| a > 30° | RTLSR | -- | -- | 0.0842 | 27.130% | 0.0718 | 19.038% | 0.0602 | 19.127% | 0.0514 | 14.240% |
| TCKD | -- | -- | 0.0843 | 26.971% | 0.0450 | 14.929% | 0.0498 | 14.558% | 0.0409 | 10.833% | |
| KDST-TCKD | -- | -- | 0.0765 | 24.059% | 0.0384 | 11.752% | 0.0420 | 12.544% | 0.0340 | 8.625% | |
| Model | Broad | Needleleaf | Savannas | Shrub | Glasslands | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | RMSE | MAPE | ||
| a < 10° | RTLSR | 0.0250 | 6.642% | 0.0544 | 19.478% | 0.0549 | 19.452% | 0.0209 | 6.587% | 0.0233 | 7.422% |
| TCKD | 0.0243 | 6.343% | 0.0543 | 19.288% | 0.0542 | 19.260% | 0.0202 | 6.170% | 0.0224 | 6.909% | |
| KDST-TCKD | 0.0238 | 6.147% | 0.0530 | 18.742% | 0.0531 | 18.721% | 0.0196 | 5.986% | 0.0216 | 6.684% | |
| 10°–20° | RTLSR | 0.0282 | 9.161% | 0.0557 | 21.029% | 0.0690 | 21.201% | 0.0213 | 7.632% | 0.0333 | 10.116% |
| TCKD | 0.0238 | 7.221% | 0.0515 | 18.514% | 0.0634 | 18.849% | 0.0164 | 5.420% | 0.0274 | 7.849% | |
| KDST-TCKD | 0.0221 | 6.621% | 0.0484 | 17.358% | 0.0595 | 17.188% | 0.0157 | 5.136% | 0.0236 | 7.008% | |
| 20°–30° | RTLSR | 0.0643 | 14.828% | 0.0664 | 24.813% | 0.0695 | 21.954% | 0.0416 | 17.608% | 0.0322 | 11.468% |
| TCKD | 0.0579 | 11.395% | 0.0609 | 22.068% | 0.0566 | 17.112% | 0.0336 | 14.103% | 0.0272 | 9.016% | |
| KDST-TCKD | 0.0470 | 9.869% | 0.0547 | 19.154% | 0.0536 | 16.064% | 0.0297 | 12.137% | 0.0247 | 8.014% | |
| a > 30° | RTLSR | -- | -- | 0.0692 | 27.268% | 0.0774 | 23.279% | 0.0609 | 35.147% | 0.0429 | 19.369% |
| TCKD | -- | -- | 0.0601 | 25.493% | 0.0533 | 19.120% | 0.0453 | 24.785% | 0.0334 | 14.436% | |
| KDST-TCKD | -- | -- | 0.0584 | 25.733% | 0.0523 | 18.318% | 0.0358 | 19.428% | 0.0283 | 11.548% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, W.; You, D.; Wen, J.; Tang, Y.; Gong, B.; Han, Y. Evaluation of Linear Kernel-Driven BRDF Models over Snow-Free Rugged Terrain. Remote Sens. 2023, 15, 786. https://doi.org/10.3390/rs15030786
Zhu W, You D, Wen J, Tang Y, Gong B, Han Y. Evaluation of Linear Kernel-Driven BRDF Models over Snow-Free Rugged Terrain. Remote Sensing. 2023; 15(3):786. https://doi.org/10.3390/rs15030786
Chicago/Turabian StyleZhu, Wenzhe, Dongqin You, Jianguang Wen, Yong Tang, Baochang Gong, and Yuan Han. 2023. "Evaluation of Linear Kernel-Driven BRDF Models over Snow-Free Rugged Terrain" Remote Sensing 15, no. 3: 786. https://doi.org/10.3390/rs15030786
APA StyleZhu, W., You, D., Wen, J., Tang, Y., Gong, B., & Han, Y. (2023). Evaluation of Linear Kernel-Driven BRDF Models over Snow-Free Rugged Terrain. Remote Sensing, 15(3), 786. https://doi.org/10.3390/rs15030786