

2D-DOA Estimation in Multipath Using EMVS Rectangle Array

Abstract
:
1. Introduction
- ▪
- We address the issue of 2D-DOA estimation for uniform rectangular array (URA). Unlike decorrelation methods in [24,25,26], the proposed algorithm utilizes matrix reordering for data preprocessing before decomposing the covariance matrix into a subspace. Moreover, under the same Uniform Rectangular Array (URA) structure, it is applicable to single-snapshot scenarios without loss of array effective aperture when the inter-element spacing is larger than the wavelength. So the proposed method outperforms the existing SS and PS methods.
- ▪
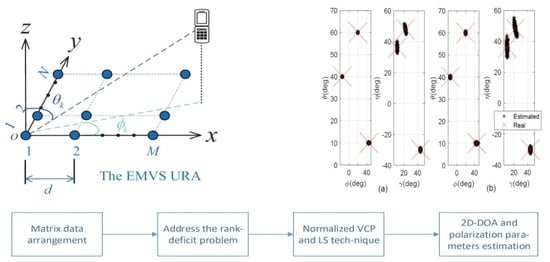
- We propose a novel estimation approach for EMVS rectangle array. Different from [27,28], the proposed algorithm is based on reordering the array outputs, rather than reconstructing the signal covariance matrix, which significantly reduces the computational burden. It not only achieves automatic pairing of 2D-DOA, but also enables estimation of the polarization state simultaneously. The 2D-DOA and polarization characteristics are obtained via the vector cross product (VCP) and the least squares (LS) method. More importantly, the proposed algorithm achieves excellent estimation performance with a small number of snapshots, while maintaining stable estimation performance for uncorrelated, partially correlated and fully coherent signals.
- ▪
- In our analysis, we examine the proposed algorithm in terms of identifiability, complexity and the Cramér–Rao Bound (CRB). Additionally, we conduct comprehensive computer simulations to validate the effectiveness of the algorithm.
2. Signal Model of Polarized URA
- A1.
- The number of sensors along the x-axis must not be less than the number of source signals K, i.e., .
- A2.
- The DOA pairs are distinct, so that the column vectors are orthogonal, i.e., , . Special emphasis is placed on the fact that under the simulated source DOA conditions in this article, when the DOA difference between the sources is greater than 10 degrees, it is considered that is orthogonal at this time. The relevant proofs of the following lemma in this article also follow this condition.
- A3.
- It is assumed that the noise follows a Gaussian white distribution with zero mean and a variance of . In addition, the noise is uncorrelated with the source signals.
3. The Proposed Method
3.1. Matrix Rearrangement
3.2. Estimation of Both 2D-DOA and Polarization
4. Algorithmic Analyses
4.1. Related Remarks
4.2. Identifiability
4.3. Complexity
4.4. CRB
4.5. The Orthogonality of Steering Vector
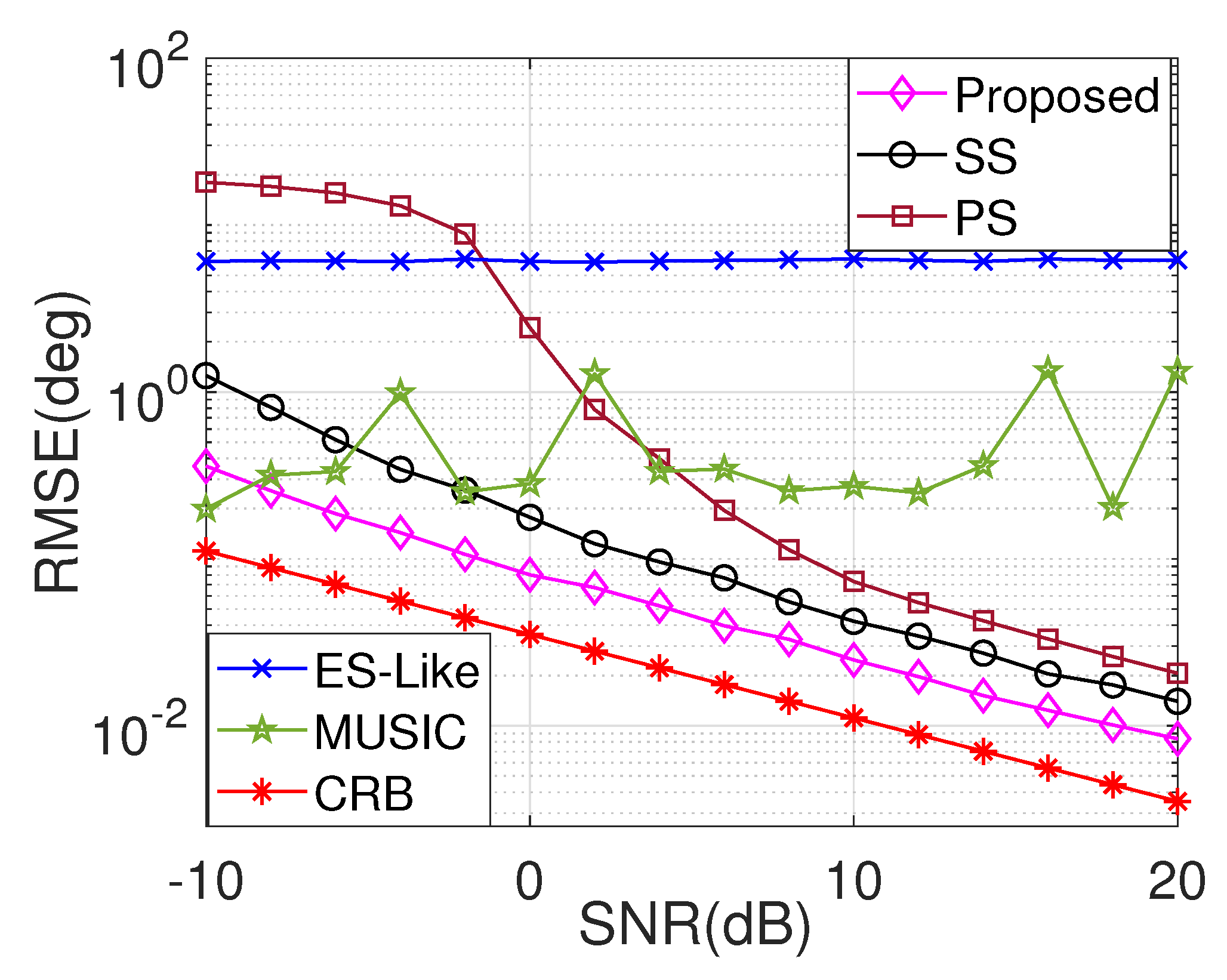
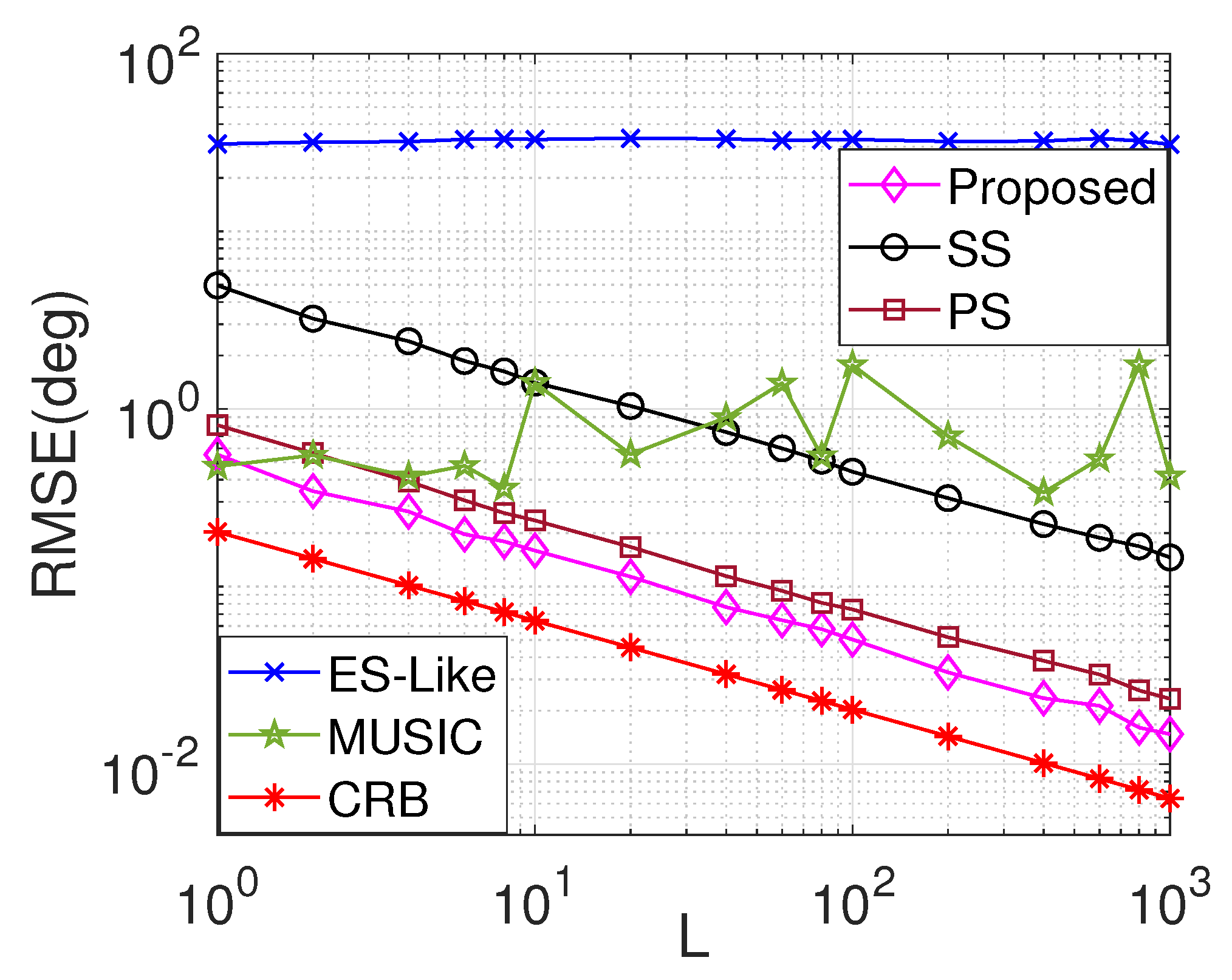
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yu, J.; Li, J.; Sun, B.; Jiang, Y.; Xu, L. Multiple RFI sources location method combining two-dimensional ESPRIT DOA estimation and particle swarm optimization for spaceborne SAR. Remote Sens. 2021, 13, 1207. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, Y.; Yang, J.; Zhang, D.; Zhang, Y.; Zhang, Y.; Huang, Y.; Jakobsson, A. Online sparse DOA estimation based on sub–aperture recursive LASSO for TDM–MIMO radar. Remote Sens. 2022, 14, 2133. [Google Scholar] [CrossRef]
- Wan, B.; Wu, X.; Yue, X.; Zhang, L.; Wang, L. Calibration of phased-array high-frequency radar on an anchored floating platform. Remote Sens. 2022, 14, 2174. [Google Scholar] [CrossRef]
- Ding, X.; Hu, Y.; Liu, C.; Wan, Q. Coherent targets parameter estimation for EVS-MIMO radar. Remote Sens. 2022, 14, 4331. [Google Scholar] [CrossRef]
- Mao, Z.; Liu, S.; Qin, S.; Haung, Y. Cramér-Rao Bound of joint DOA-range estimation for coprime frequency diverse arrays. Remote Sens. 2022, 14, 583. [Google Scholar] [CrossRef]
- McCloud, M.J.; Scharf, L.L. A new subspace identification algorithm for high-resolution DOA estimation. IEEE Trans. Antennas Propag. 2002, 50, 1382–1390. [Google Scholar] [CrossRef]
- Han, F.M.; Zhang, X.D. An ESPRIT-Like algorithm for coherent DOA estimation. IEEE Antennas Wireless Propag. Lett. 2005, 4, 443–446. [Google Scholar] [CrossRef]
- Shen, Q.; Liu, W.; Cui, W.; Wu, S.L. Underdetermined DOA Estimation Under the Compressive Sensing Framework: A Review. IEEE Access 2016, 4, 8865–8878. [Google Scholar] [CrossRef]
- Zhang, Y.; Ng, B.P. MUSIC-like DOA estimation without estimating the number of sources. IEEE Trans. Signal Process. 2010, 58, 1668–1676. [Google Scholar] [CrossRef]
- Wu, Y.; Liao, G.; So, H.C. A fast algorithm for 2-D direction-of-arrival estimation. Signal Process. 2003, 83, 1827–1831. [Google Scholar] [CrossRef] [Green Version]
- Xi, N.; Li, P.L. A computationally efficient subspace algorithm for 2-D DOA estimation with L-shaped array. IEEE Signal Process. Lett. 2014, 21, 971–974. [Google Scholar] [CrossRef]
- Chen, F.J.; Kwong, S.; Kok, C.W. ESPRIT-Like two-dimensional DOA estimation for coherent signals. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1477–1484. [Google Scholar] [CrossRef]
- Wen, F.Q.; Shi, J.P.; Gui, G.; Gacanin, H.; Dobre, O.A. 3-D Positioning Method for Anonymous UAV Based on Bistatic Polarized MIMO Radar. IEEE Internet Things J. 2023, 10, 815–827. [Google Scholar] [CrossRef]
- Zhang, B.; Xu, G.; Zhou, R.; Zhang, H.; Hong, W. Multi-channel back-projection algorithm for mmwave automotive MIMO SAR imaging with Doppler-division multiplexing. IEEE J. Sel. Top. Signal Process. 2022, 17, 445–457. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, B.J.; Yu, H.W.; Chen, J.; Xing, M.; Hong, W. Sparse Synthetic Aperture Radar Imaging from Compressed Sensing and Machine Learning: Theories, Applications and Trends. IEEE Geosci. Remote. Sens. Mag. 2022, 10, 32–69. [Google Scholar] [CrossRef]
- Xu, G.; Zhang, B.J.; Chen, J.L.; Hong, W. Structured Low-Rank and Sparse Method for ISAR Imaging With 2-D Compressive Sampling. IEEE Trans. Geosci. Remote. Sens. 2022, 60, 5239014. [Google Scholar] [CrossRef]
- Wen, F.Q.; Guan, G.; Gacanin, H.; Sari, H. Compressive Sampling Framework for 2D-DOA and Polarization Estimation in mmWave Polarized Massive MIMO Systems. IEEE Trans. Wirel. Commun. 2022, 22, 3071–3083. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. Closed-form direction finding and polarization estimation with arbitrarily spaced electromagnetic vector-sensors at unknown locations. IEEE Trans. Antenna. Propag. 2000, 48, 671–681. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Zhang, Y.; Zheng, G. ESPRIT-Like two-dimensional DOA estimation for monostatic MIMO radar with electromagnetic vector received sensors under the condition of gain and phase uncertainties and mutual coupling. Sensors 2017, 17, 2457. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, T.; Zhang, X.; Zheng, W. DOA estimation for coprime EMVS arrays via minimum distance criterion based on PARAFAC analysis. IET Radar Sonar Nav. 2019, 13, 65–73. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, H.; Wen, F.Q.; Shi, J.P. PARAFAC estimators for coherent targets in EMVS-MIMO radar with arbitrary geometry. Remote Sens. 2022, 14, 2905. [Google Scholar] [CrossRef]
- Fu, M.C.; Zheng, Z.; Wang, W.Q.; So, H.C. Coarray Interpolation for DOA Estimation Using Coprime EMVS Array. IEEE Signal Process. Lett. 2021, 28, 548–552. [Google Scholar] [CrossRef]
- Lan, X.; Liu, W.; Ngan, H.Y. Joint DOA and Polarization Estimation With Crossed-Dipole and Tripole Sensor Arrays. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 4965–4973. [Google Scholar] [CrossRef]
- Rahamim, D.; Tabrikian, J.; Shavit, R. Source localization using vector sensor array in a multipath environment. IEEE Trans. Signal Process. 2004, 52, 3096–3103. [Google Scholar] [CrossRef]
- Rahamim, D.; Shavit, R.; Tabrikian, J. Coherent source localization using vector sensor arrays. In Proceedings of the 2003 IEEE International Conference on Acoustics, Speech and Signal Processing, ICASSP ’03, Hong Kong, China, 6–10 April 2003; Volume 5, pp. V–141. [Google Scholar] [CrossRef]
- He, J.; Jiang, S.L.; Wang, J.T.; Liu, Z. Polarization difference smoothing for direction finding of coherent signals. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 469–480. [Google Scholar] [CrossRef]
- Wu, J.L.; Wen, F.Q.; Shi, J.P. Fast angle estimation in MIMO system with direction-dependent mutual coupling. IEEE Commun. Lett. 2021, 25, 2913–2917. [Google Scholar] [CrossRef]
- Ren, S.W.; Ma, X.C.; Yan, S.F.; Hao, C.P. 2-D unitary ESPRIT-Like direction-of-arrival (DOA) estimation for coherent signals with a uniform rectangular array. Sensors 2013, 13, 4272–4288. [Google Scholar] [CrossRef] [Green Version]
- Cao, M.Y.; Mao, X.P.; Long, X.Z.; Huang, L. Tensor approach to DOA estimation of coherent signals with electromagnetic vector-sensor array. Sensors 2018, 18, 4320. [Google Scholar] [CrossRef] [Green Version]
- Wong, K.T.; Yuan, X. Vector Cross-Product Direction-Finding with an Electromagnetic Vector-Sensor of Six Orthogonally Oriented But Spatially Noncollocating Dipoles/Loops. IEEE Trans. Signal Process. 2010, 59, 160–171. [Google Scholar] [CrossRef]
- Wong, K.T.; Zoltowski, M.D. High accuracy 2D angle estimation with extended aperture vector sensor arrays. In Proceedings of the 1996 IEEE International Conference on Acoustics, Speech and Signal Processing Conference Proceedings, Atlanta, GA, USA, 9 May 1996; Volume 5, pp. 2789–2792. [Google Scholar] [CrossRef]
- Wen, F.Q.; Ren, D.; Zhang, X.X.; Gui, G.; Adebisi, B.; Sari, H.; Adachi, F. Fast localizing for anonymous UAVs oriented toward polarized massive MIMO systems. IEEE Internet Things J. 2023. [Google Scholar] [CrossRef]
- Zheng, Z.; Zheng, Y.; Wang, W.Q.; Zhang, H.B. Covariance matrix reconstruction with interference steering vector and power estimation for robust adaptive beamforming. IEEE Trans. Veh. Technol. 2018, 67, 8495–8503. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Coherent Source | Incoherent Source |
|---|---|---|
| ESPRIT | 0 | |
| MUSIC | 0 | |
| SS | ||
| PS | ||
| Proposed |
| Algorithm | Computation Load |
|---|---|
| ESPRIT | |
| SS | |
| PS | |
| MUSIC | |
| Proposed |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Zhang, L.; Wang, H.; Shi, J. 2D-DOA Estimation in Multipath Using EMVS Rectangle Array. Remote Sens. 2023, 15, 3308. https://doi.org/10.3390/rs15133308
Zhang Z, Zhang L, Wang H, Shi J. 2D-DOA Estimation in Multipath Using EMVS Rectangle Array. Remote Sensing. 2023; 15(13):3308. https://doi.org/10.3390/rs15133308
Chicago/Turabian StyleZhang, Zhe, Lei Zhang, Han Wang, and Junpeng Shi. 2023. "2D-DOA Estimation in Multipath Using EMVS Rectangle Array" Remote Sensing 15, no. 13: 3308. https://doi.org/10.3390/rs15133308