


A Block-Scale FFT Filter Based on Spatial Autocorrelation Features of Speckle Noise in SAR Image


 , ,
, , 
Abstract
:1. Introduction
2. Data and Methods
2.1. Data
2.1.1. Overview of the Study Area
2.1.2. Satellite Imagery
2.2. Method
2.2.1. Speckle Noise Period Characteristics of BC
- (1).
- Characteristics of ground objects on BC
- (2).
- Calculation method of SAR image noise spatial period
- (1)
- Matrix of m row n column:
- (2)
- remove the average value mean (A) of :
- (3)
- calculating autocorrelation of the
- (4)
- Normalize the autocorrelation coefficient matrix
- (5)
- Calculate the autocorrelation coefficient of images at different pixel scales d.
- (6)
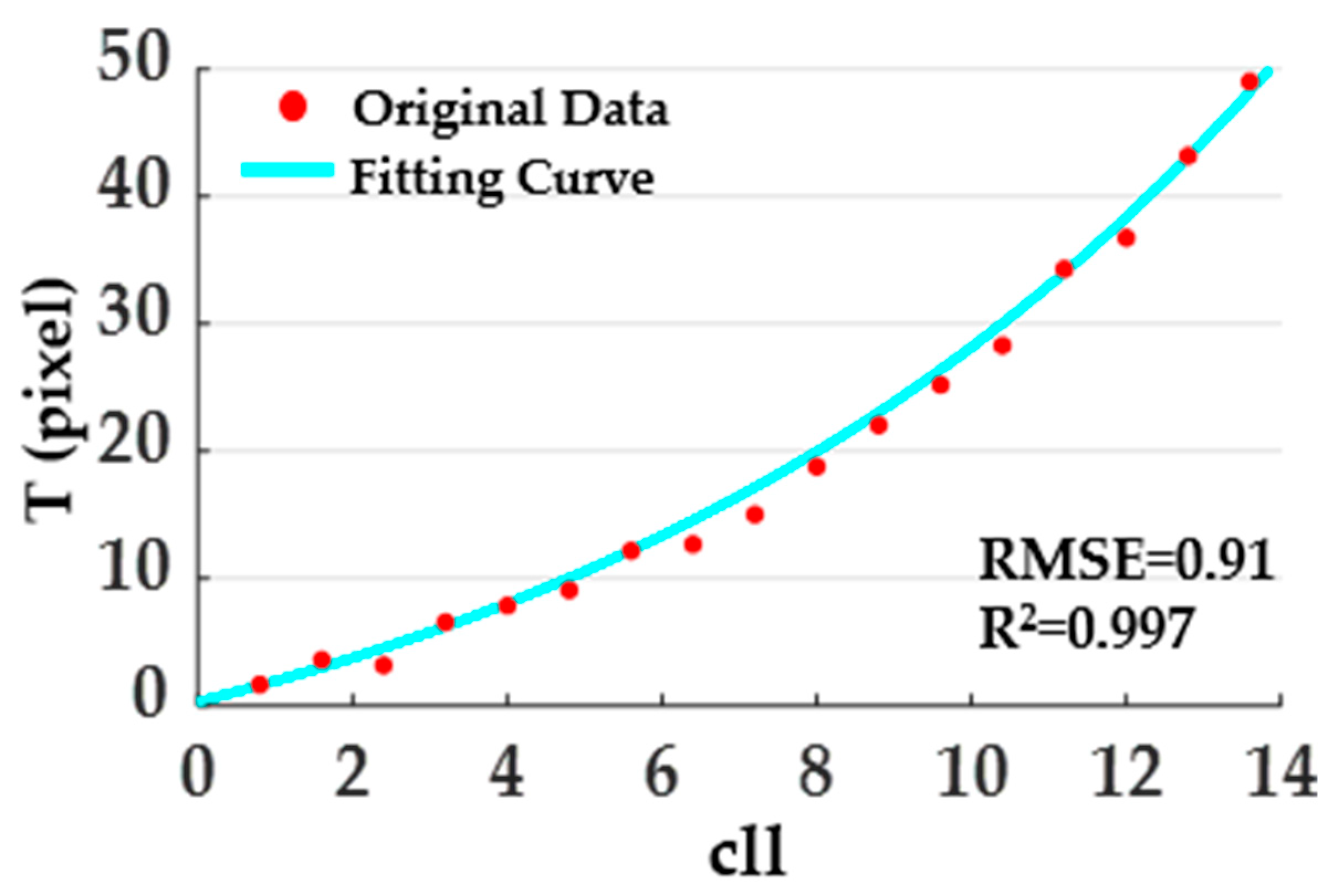
- Gaussian fit
- (7)
- Relationship between correlation length and period
2.2.2. FFT Filtering Algorithm at Land Parcel Scale
2.2.3. Filter Quality
2.2.4. Comparison of Multiple Filtering Methods
3. Results
3.1. Annual Analysis of Different Ground Object Noise Periods
3.2. Comparison of the Effects of Multiple Filtering Methods
3.3. Comparison of the Filtering Effects of the Time-Series Images
4. Discussion
4.1. The Filtering Method Based on the Land Parcel Boundary Improves the Boundary Blur Phenomenon of the Original Filtering Method
4.2. Filtering Effect Varies with the Change of the FFT Filter Radius and the Selection of the Optimal Filter Radius
4.3. BFFT Filter Method for Large Area
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Polarization | Filter Method | Water | Paddy | Corn | Soybean |
|---|---|---|---|---|---|
| VV | Original | 0.0057 | 0.050 | 0.122 | 0.125 |
| Mean | 0.0062 | 0.052 | 0.122 | 0.125 | |
| Med | 0.0054 | 0.047 | 0.116 | 0.119 | |
| Lee | 0.0058 | 0.061 | 0.086 | 0.115 | |
| ReLee | 0.0057 | 0.060 | 0.085 | 0.113 | |
| Frost | 0.0058 | 0.050 | 0.122 | 0.125 | |
| NLM | 0.0062 | 0.053 | 0.122 | 0.125 | |
| BFFT | 0.0057 | 0.049 | 0.123 | 0.125 | |
| VH | Original | 0.0014 | 0.010 | 0.022 | 0.029 |
| Mean | 0.0015 | 0.010 | 0.022 | 0.029 | |
| Med | 0.0013 | 0.009 | 0.021 | 0.027 | |
| Lee | 0.0013 | 0.012 | 0.018 | 0.022 | |
| ReLee | 0.0013 | 0.012 | 0.017 | 0.022 | |
| Frost | 0.0014 | 0.010 | 0.022 | 0.029 | |
| NLM | 0.0014 | 0.010 | 0.022 | 0.029 | |
| BFFT | 0.0014 | 0.009 | 0.022 | 0.029 |
| Polarization | Filter Method | Water | Paddy | Corn | Soybean |
|---|---|---|---|---|---|
| VV | Original | 0.0035 | 0.027 | 0.052 | 0.052 |
| Mean | 0.0029 | 0.017 | 0.023 | 0.020 | |
| Med | 0.0018 | 0.015 | 0.023 | 0.020 | |
| Lee | 0.0027 | 0.046 | 0.042 | 0.050 | |
| ReLee | 0.0029 | 0.047 | 0.044 | 0.053 | |
| Frost | 0.0022 | 0.018 | 0.025 | 0.022 | |
| NLM | 0.0023 | 0.014 | 0.016 | 0.012 | |
| BFFT | 0.0016 | 0.013 | 0.021 | 0.010 | |
| VH | Original | 0.0007 | 0.005 | 0.010 | 0.013 |
| Mean | 0.0005 | 0.003 | 0.004 | 0.005 | |
| Med | 0.0002 | 0.003 | 0.004 | 0.005 | |
| Lee | 0.0005 | 0.007 | 0.008 | 0.011 | |
| ReLee | 0.0006 | 0.007 | 0.009 | 0.012 | |
| Frost | 0.0003 | 0.003 | 0.004 | 0.006 | |
| NLM | 0.0003 | 0.002 | 0.002 | 0.003 | |
| BFFT | 0.0002 | 0.002 | 0.004 | 0.004 |
| Polarization | Filter Method | Water | Paddy | Corn | Soybean |
|---|---|---|---|---|---|
| VV | Original | 2.652 | 3.341 | 5.541 | 5.756 |
| Mean | 4.532 | 9.297 | 27.183 | 38.870 | |
| Med | 8.590 | 9.760 | 24.763 | 36.003 | |
| Lee | 4.546 | 1.787 | 4.188 | 5.222 | |
| ReLee | 3.860 | 1.631 | 3.672 | 4.484 | |
| Frost | 6.662 | 7.729 | 23.098 | 31.040 | |
| NLM | 7.535 | 14.532 | 58.593 | 117.565 | |
| BFFT | 12.870 | 13.953 | 34.364 | 84.829 | |
| VH | Original | 3.547 | 3.249 | 4.993 | 5.160 |
| Mean | 7.830 | 11.185 | 30.689 | 32.545 | |
| Med | 32.681 | 12.644 | 27.734 | 28.891 | |
| Lee | 5.985 | 2.968 | 4.301 | 4.448 | |
| ReLee | 5.250 | 2.456 | 3.547 | 3.636 | |
| Frost | 16.317 | 9.125 | 24.081 | 25.963 | |
| NLM | 18.029 | 17.261 | 85.977 | 96.003 | |
| BFFT | 57.077 | 22.631 | 39.339 | 65.446 |
References
- Lee, J.-S. Speckle Suppression and Analysis for Synthetic Aperture Radar Images. Opt. Eng. 1986, 25, 636–643. [Google Scholar] [CrossRef]
- Liu, F.; Masouros, C.; Petropulu, A.P.; Griffiths, H.; Hanzo, L. Joint Radar and Communication Design: Applications, State-of-the-Art, and the Road Ahead. IEEE Trans. Commun. 2020, 68, 3834–3862. [Google Scholar] [CrossRef] [Green Version]
- Maity, A.; Pattanaik, A.; Sagnika, S.; Pani, S. A Comparative Study on Approaches to Speckle Noise Reduction in Images. In Proceedings of the 1st International Conference on Computational Intelligence and Networks (CINE 2015), Bhubaneswar, India, 12–13 January 2015; pp. 148–155. [Google Scholar] [CrossRef]
- López-Martínez, C.; Fàbregas, X. Polarimetric SAR Speckle Noise Model. IEEE Trans. Geosci. Remote Sens. 2003, 41, 2232–2242. [Google Scholar] [CrossRef] [Green Version]
- Qiu, F.; Berglund, J.; Jensen, J.R.; Thakkar, P.; Ren, D. Speckle Noise Reduction in SAR Imagery Using a Local Adaptive Median Filter. Gisci. Remote Sens. 2004, 41, 244–266. [Google Scholar] [CrossRef] [Green Version]
- Ma, X.; Wu, P.; Wu, Y.; Shen, H. A Review on Recent Developments in Fully Polarimetric SAR Image Despeckling. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 743–758. [Google Scholar] [CrossRef]
- Wu, W.; Huang, X.; Shao, Z.; Teng, J.; Li, D. SAR-DRDNet: A SAR Image Despeckling Network with Detail Recovery. Neurocomputing 2022, 493, 253–267. [Google Scholar] [CrossRef]
- Baraha, S.; Sahoo, A.K.; Modalavalasa, S. A Systematic Review on Recent Developments in Nonlocal and Variational Methods for SAR Image Despeckling. Signal Process. 2022, 196, 108521. [Google Scholar] [CrossRef]
- Foucher, S.; Farage, G.; Bénié, G.B. Polarimetric SAR Image Filtering with Trace-Based Partial Differential Equations. Can. J. Remote Sens. 2014, 33, 226–236. [Google Scholar] [CrossRef]
- Chan, D.; Gambini, J.; Frery, A.C. Entropy-Based Non-Local Means Filter for Single-Look SAR Speckle Reduction. Remote Sens. 2022, 14, 509. [Google Scholar] [CrossRef]
- Pang, Y.; Jiang, S.; Cheng, B.; Liu, W.; Wu, Y. Design and Implement of Median Filter toward Remote Sensing Images Based on FPGA. In Proceedings of the International Conference on ASIC, Kunming, China, 26–29 October 2021. [Google Scholar] [CrossRef]
- Yommy, A.S.; Liu, R.; Onuh, S.O.; Ikechukwu, A.C. SAR Image Despeckling and Compression Using K-Nearest Neighbour Based Lee Filter and Wavelet. In Proceedings of the 2015 8th International Congress on Image and Signal Processing (CISP 2015), Shenyang, China, 14–16 October 2015; pp. 158–167. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Z.; Chen, Y.; Liu, S.; Song, Y. Frost Filtering Algorithm of SAR Images with Adaptive Windowing and Adaptive Tuning Factor. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1097–1101. [Google Scholar] [CrossRef]
- Quegan, S.; Yu, J.J. Filtering of Multichannel SAR Images. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2373–2379. [Google Scholar] [CrossRef]
- Lattari, F.; Leon, B.G.; Asaro, F.; Rucci, A.; Prati, C.; Matteucci, M. Deep Learning for SAR Image Despeckling. Remote Sens. 2019, 11, 1532. [Google Scholar] [CrossRef] [Green Version]
- Franceschetti, G.; Schirinzi, G. A SAR Processor Based on Two-Dimensional FFT Codes. IEEE Trans. Aerosp. Electron. Syst. 1990, 26, 356–366. [Google Scholar] [CrossRef]
- Weaver, J.B.; Xu, Y.; Healy, D.M.; Cromwell, L.D. Filtering Noise from Images with Wavelet Transforms. Magn. Reson. Med. 1991, 21, 288–295. [Google Scholar] [CrossRef]
- Dong, Y.; Milne, A.K.; Forster, B.C. Toward Edge Sharpening: A SAR Speckle Filtering Algorithm. IEEE Trans. Geosci. Remote Sens. 2001, 39, 851–863. [Google Scholar] [CrossRef]
- Simard, M.; Degrandi, G. Analysis of Speckle Noise Contribution on Wavelet Decomposition of SAR Images. IEEE Trans. Geosci. Remote Sens. 1998, 36, 1953–1962. [Google Scholar] [CrossRef]
- Sentinel-1—Overview—Sentinel Online—Sentinel Online. Available online: https://sentinels.copernicus.eu/web/sentinel/missions/sentinel-1/overview (accessed on 18 December 2022).
- Sentinel-1 Toolbox—Sentinel Online. Available online: https://sentinel.esa.int/web/sentinel/toolboxes/sentinel-1 (accessed on 2 October 2022).
- Durand, S.; Fadili, J.; Nikolova, M. Multiplicative Noise Cleaning via a Variational Method Involving Curvelet Coefficients. In Scale Space and Variational Methods in Computer Vision; Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2009; Volume 5567, pp. 282–294. [Google Scholar] [CrossRef]
- Salehi, H.; Vahidi, J.; Abdeljawad, T.; Khan, A.; Rad, S.Y.B. A SAR Image Despeckling Method Based on an Extended Adaptive Wiener Filter and Extended Guided Filter. Remote Sens. 2020, 12, 2371. [Google Scholar] [CrossRef]
- Marcoleonetti1 (2022). Speckle Autocorrelation—File Exchange—MATLAB Central. Available online: https://ww2.mathworks.cn/matlabcentral/fileexchange/94765-speckle-autocorrelation?s_tid=srchtitle_speckle%20autocorrelation_1 (accessed on 2 October 2022).
- Maes, M.A.; Breitung, K.; Dann, M.R. At Issue: The Gaussian Autocorrelation Function. Lect. Notes Civil Eng. 2021, 153 LNCE, 191–203. [Google Scholar] [CrossRef]
- Li, H.; Duan, X.L. SAR Ship Image Speckle Noise Suppression Algorithm Based on Adaptive Bilateral Filter. Wirel. Commun. Mob. Comput. 2022, 2022, 9392648. [Google Scholar] [CrossRef]
- Rubel, O.; Lukin, V.; Rubel, A.; Egiazarian, K. Selection of Lee Filter Window Size Based on Despeckling Efficiency Prediction for Sentinel SAR Images. Remote Sens. 2021, 13, 1887. [Google Scholar] [CrossRef]
- Irfan Shaikh, A.; Shafiyoddin Badroddin, S. Statistical Analysis of Speckle Noise Reduction in C-Band SAR Image Using FFT Based Circular Pass Filter And Circular Cut Filter. Ann. Rom. Soc. Cell Biol. 2021, 25, 1054–1065. [Google Scholar]
- Mateo, C.; Talavera, J.A. Short-Time Fourier Transform with the Window Size Fixed in the Frequency Domain (STFT-FD): Implementation. SoftwareX 2018, 8, 5–8. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Meng, Z.; Chen, S.; Feng, Z.; Li, X.; Guo, T.; Wang, C.; Zheng, X. A Block-Scale FFT Filter Based on Spatial Autocorrelation Features of Speckle Noise in SAR Image. Remote Sens. 2023, 15, 247. https://doi.org/10.3390/rs15010247
Wang X, Meng Z, Chen S, Feng Z, Li X, Guo T, Wang C, Zheng X. A Block-Scale FFT Filter Based on Spatial Autocorrelation Features of Speckle Noise in SAR Image. Remote Sensing. 2023; 15(1):247. https://doi.org/10.3390/rs15010247
Chicago/Turabian StyleWang, Xigang, Zhiguo Meng, Si Chen, Zhuangzhuang Feng, Xinbiao Li, Tianhao Guo, Chunmei Wang, and Xingming Zheng. 2023. "A Block-Scale FFT Filter Based on Spatial Autocorrelation Features of Speckle Noise in SAR Image" Remote Sensing 15, no. 1: 247. https://doi.org/10.3390/rs15010247