3.1. Influence on UERE and UDRE
To obtain the equivalent clock correction broadcast by the WADS, the UERE of the B1I/B3I signal was calculated as follows:
where
is the UERE of the B1I/B3I signal from satellite i to receiver B.
According to Equations (5) and (11), Equation (12) can be obtained:
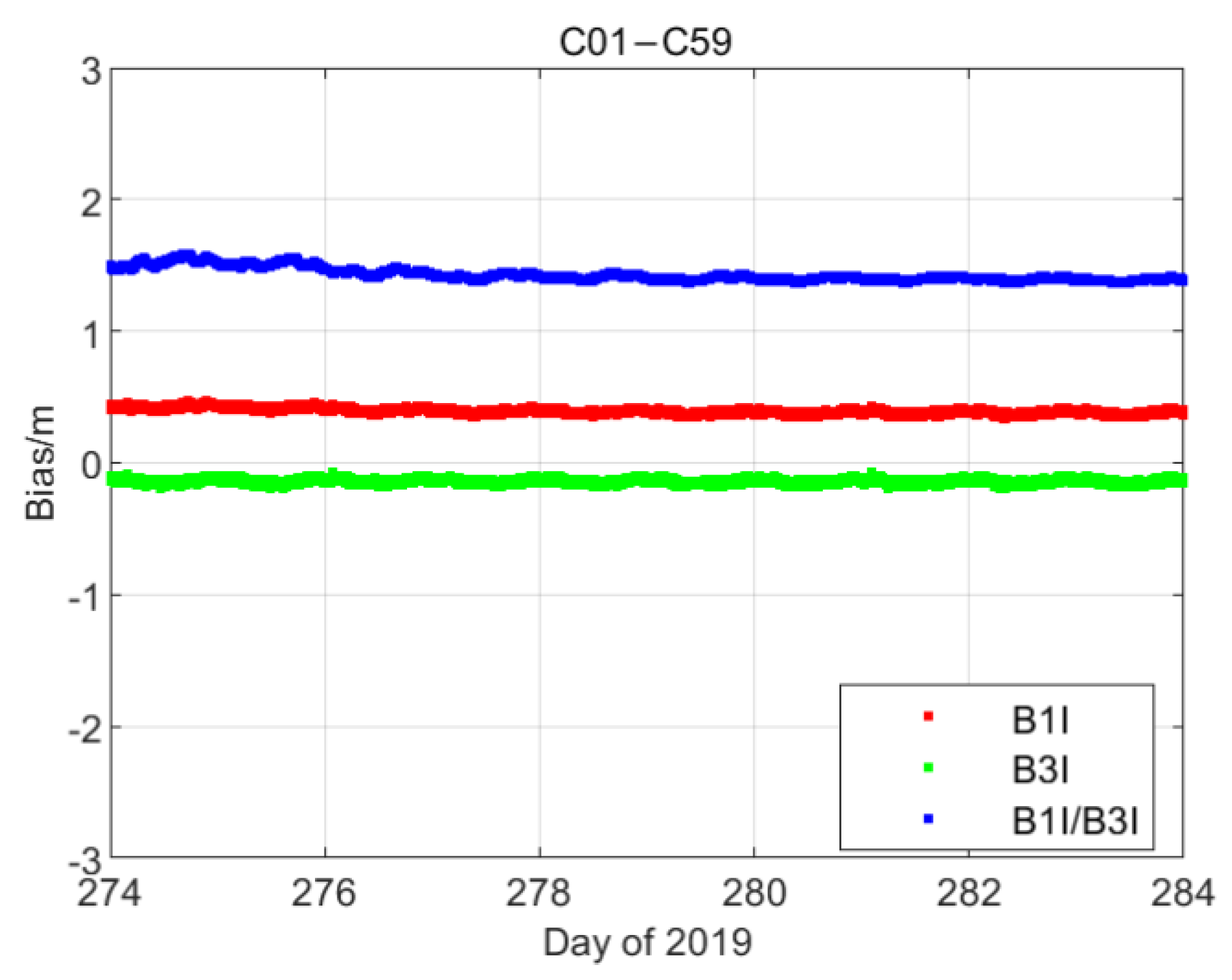
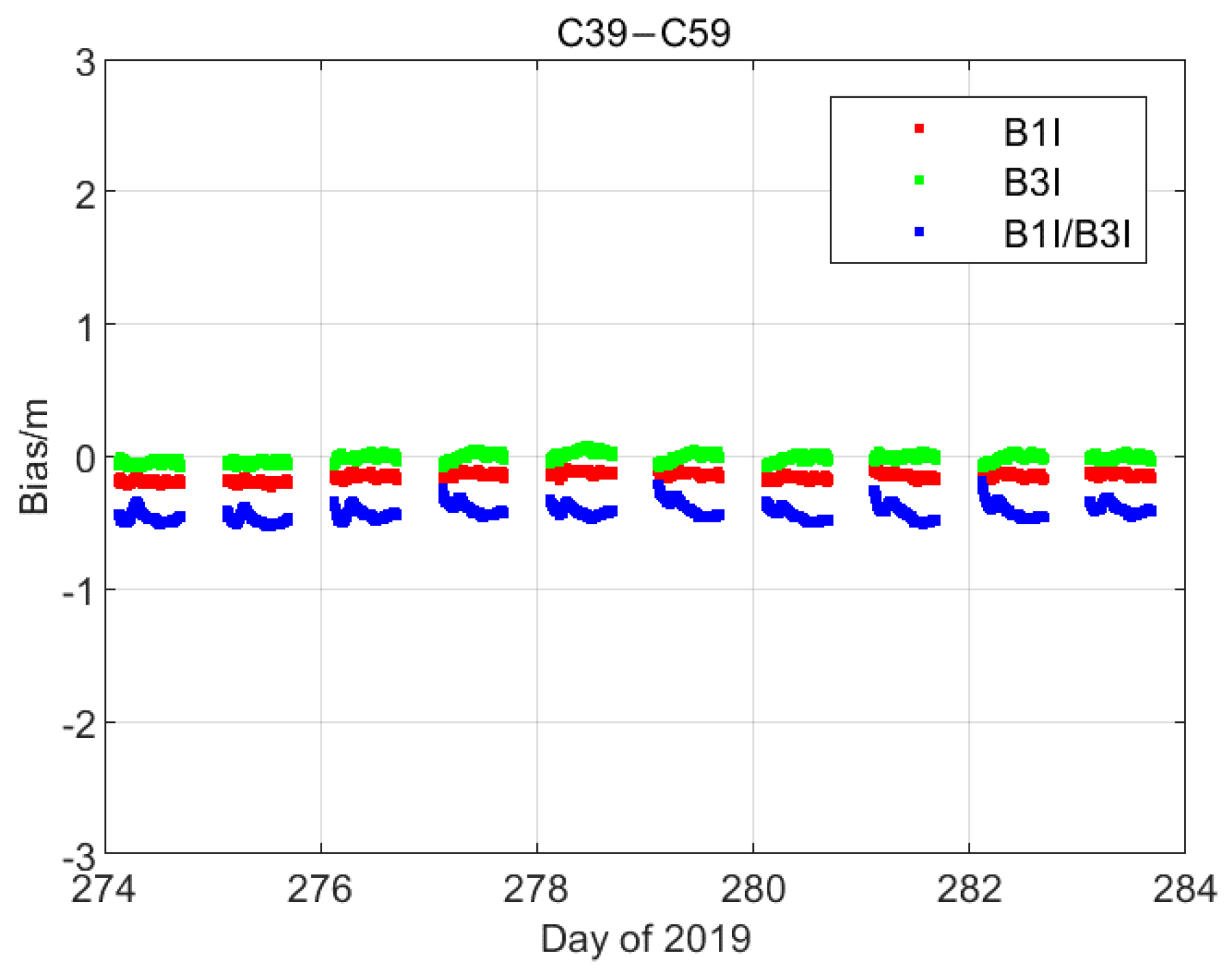
From Equation (12), if the user receiver has the same configuration as the BDS monitoring receiver, the pseudorange bias of this type of receiver is canceled by the pseudorange bias in the equivalent clock correction to obtain an ideal effect of correction under the WADS. If there is a different pseudorange bias between the user receiver and the BDS monitoring receiver, it will inevitably bring a relative pseudorange bias .
Similarly, the UERE of the B1I signal under the WADS was calculated as follows:
where
is the user equivalent range error of the B1I signal from the satellite i to the receiver B.
Equation (14) can be obtained according to Equations (5), (9) and (13):
In contrast to the UERE of the B1I/B3I signal, ionospheric correction was added to the UERE of the B1I signal. If there is a pseudorange bias in the observation from the BDS satellite to the monitoring receiver, a bias will be introduced in the ionospheric correction, which will affect the UERE of the BII signal. In contrast to the UERE of the B1I/B3I signal in Equation (12), the bias in Equation (14) cannot be completely deducted if the user receiver has the same configuration as the monitoring receiver.
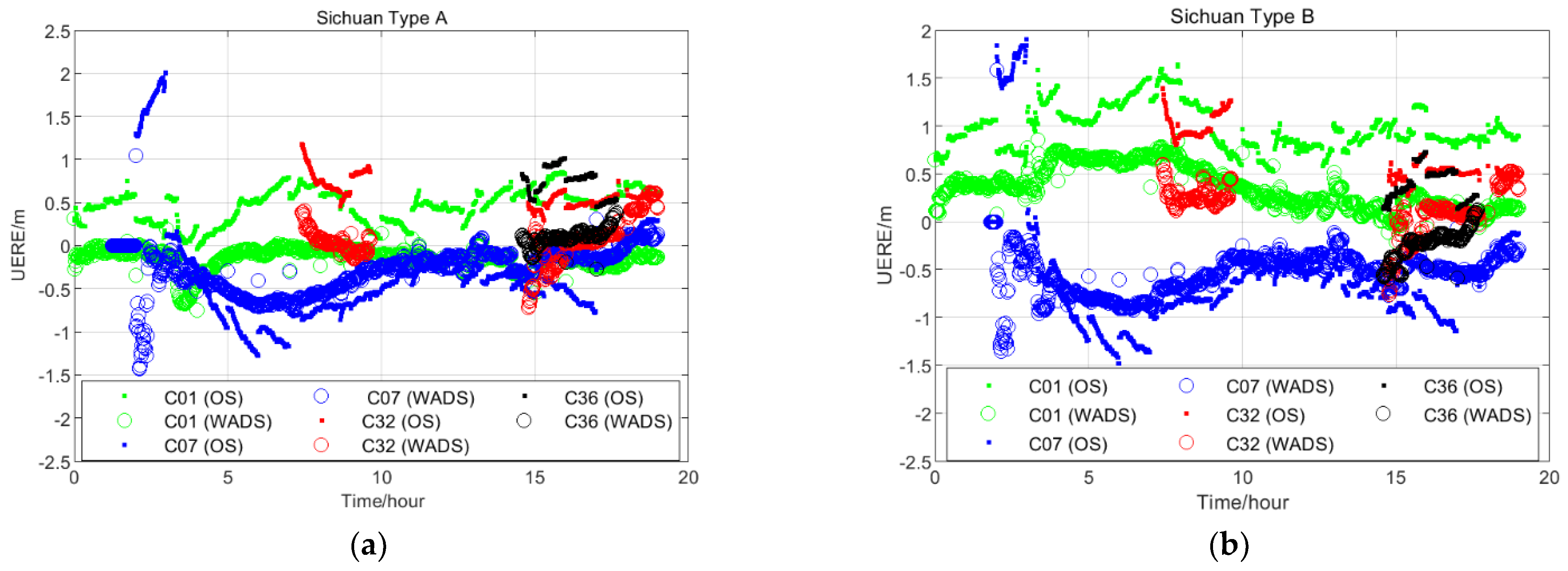
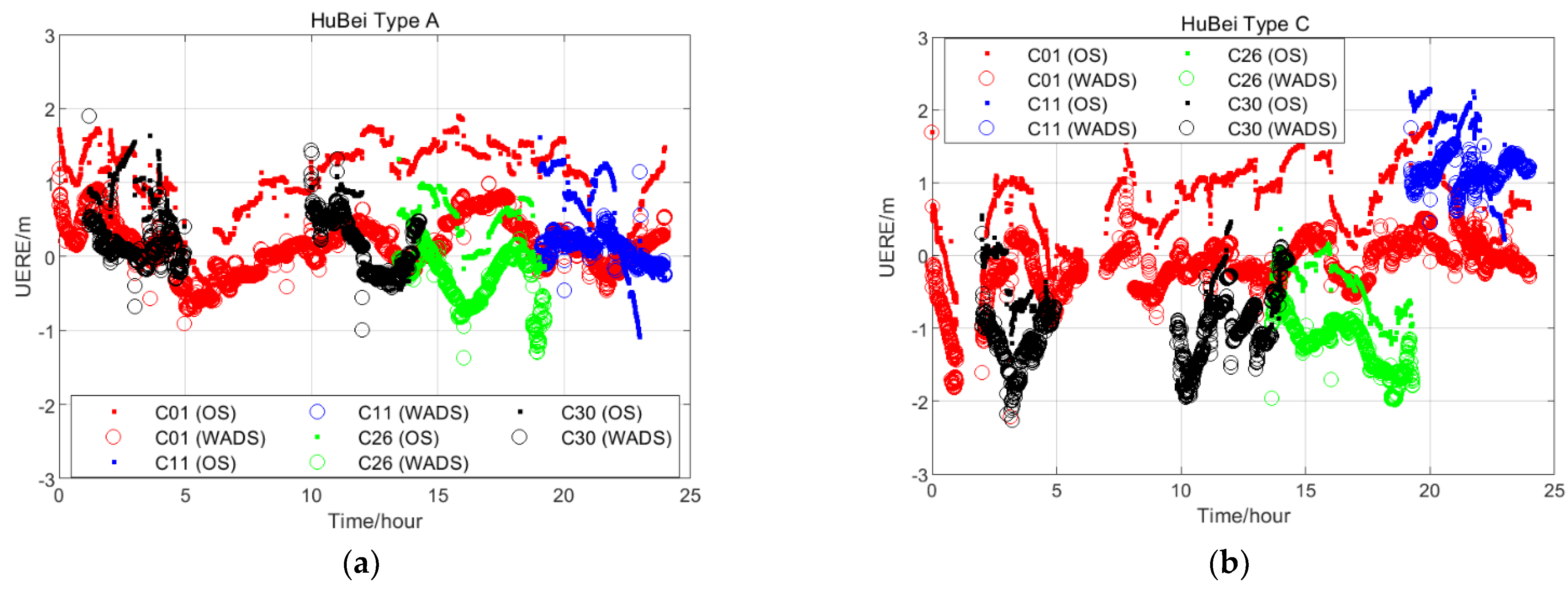
We used type A and type B receivers in the Sichuan Province and type A and type C receivers in the Hubei Province. The receivers in the same province were very close to each other. To study the impact of pseudorange bias on the WADS, observations of these receivers on 25 January 2020 were used to calculate the UERE of the BDS satellite B1I/B3I signal under the OS and the WADS. Based on the two receivers with different type, the UERE of the C1, C7, C32 and C36 satellites in the Sichuan Province are shown in
Figure 4, and the UERE of the C1, C11, C26 and C30 satellites in the Hubei Province are shown in
Figure 5.
Figure 4a,b represent the UERE of the type A and type B receivers under the OS and the WADS in the Sichuan Province.
Figure 5a,b are the UERE of the type A and type C receivers under the OS and the WADS in the Hubei Province.
In these figures, there are different constant biases in the UEREs of some satellites, as calculated by three types of receivers (type A, type B and type C) in the OS. These biases could be effectively eliminated by the equivalent clock correction parameter in the type A receiver UEREs, but they were still there and partly increased in type B and type C receiver UEREs after the correction based on the equivalent clock correction parameter. The UEREs of the type B and type C receivers for some satellites could not be improved in the WADS because of the pseudorange bias, which further affected the accuracy of the WADS for users.
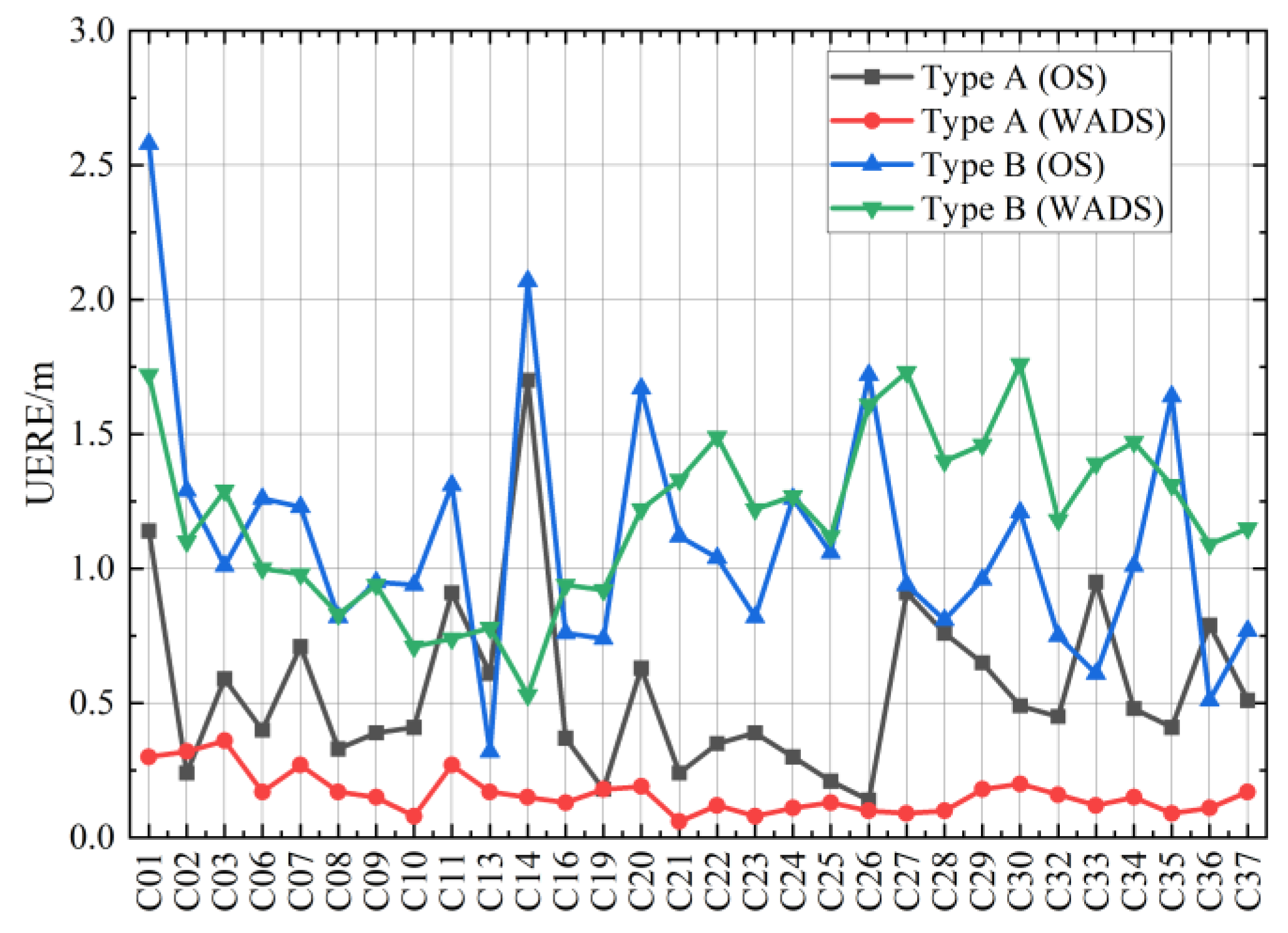
To study the influence of pseudorange bias on the UERE under the OS and the WADS, we obtained observations from type A and type B receivers in Beijing on 2 January 2020 and counted the UEREs of the BDS-3 satellites to these receivers, which are shown in
Figure 6. In
Figure 6, the black and red curves represent the UERE of the type A receiver under the OS and the WADS, respectively, and the blue and green curves represent the UERE of the type B receiver under the OS and the WADS, respectively. The pseudorange bias affected most of the UEREs of the type B receivers, which made the WADS unable to provide effective services to type B receivers.
To quantify the influence of the pseudorange bias on the type B receiver, we statistically determined the mean and standard deviation of the UERE for all BDS-3 satellites to type A and type B receivers according to
Figure 7, which are shown in
Table 4.
Table 4 shows that: (1) the average UERE of type A receivers is 0.55 m under the OS, while this average UERE is reduced by 71% under the WADS to 0.16 m; (2) the average UEREs of type B receivers are 1.11 m and 1.19 m under the OS and the WADS, respectively, and when affected by the pseudorange bias, the averages increase by 7% through the amendment of the equivalent clock parameter; (3) through the effective correction of the equivalent clock parameter, the UEREs of the type A receivers decrease to make the standard deviation of these UEREs decrease from 0.33 m to 0.07 m, however, for the standard deviation of the UEREs of the type B receivers, the number decreases from 0.47 m to 0.33 m and does not change significantly.
The WADS cannot measure the influence of pseudorange bias on different users, which means that the UDRE cannot be used by users who are influenced by pseudorange bias. The observation data and UDRE of the C04 satellite from 5 December 2019 were acquired, taking the UERE of type A and type B receivers as examples, which were compared to the UDRE, as shown in
Figure 7. The blue and black lines represent the UERE of C04 to the type A and type B receivers under the WADS, respectively, and the red line is the C04 UDRE. Obviously, the UDRE cannot fully envelop the UERE of the type B receivers, which is under the WADS.
3.2. Influence on Position Accuracy
According to Equation (12), the observation equation was set and
was represented as
.
could not be absorbed by the receiver clock error because the same type of receiver had different pseudorange biases for different satellites, which further affected the positioning accuracy for the user.
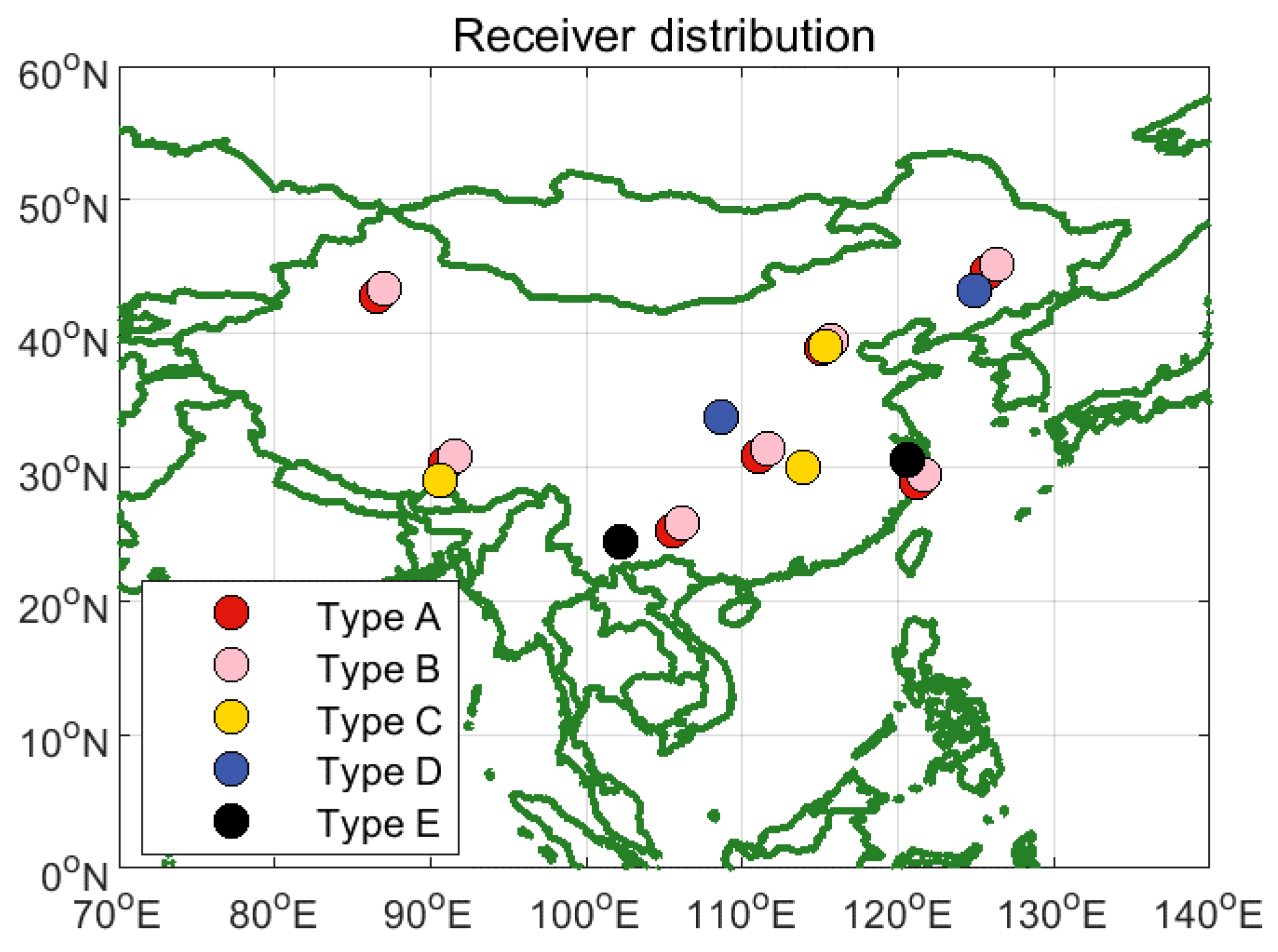
Some receivers were affected by the pseudorange bias, which prevented the UERE from being effectively reduced by the equivalent clock parameter. Moreover, the positioning accuracy was influenced by the UERE and DOP. To analyze the influence of pseudorange bias on the user positioning accuracy of the WADS, we chose 21 receivers in China, including 7 type A receivers, 7 type B receivers collocated with type A receivers, 3 type C receivers, 2 type D receivers and 2 type E receivers. The distribution of these receivers is shown in
Figure 8.
Observations of these 21 receivers taken over 14 days from 1 to 14 December 2019 were used to evaluate the positioning accuracy of the B1I and B1I/B3I frequencies in the OS and the WADS. The results are shown in
Table 5, and the average B1I and B1I/B3I positioning accuracies of the five types of receivers in the two services are presented in
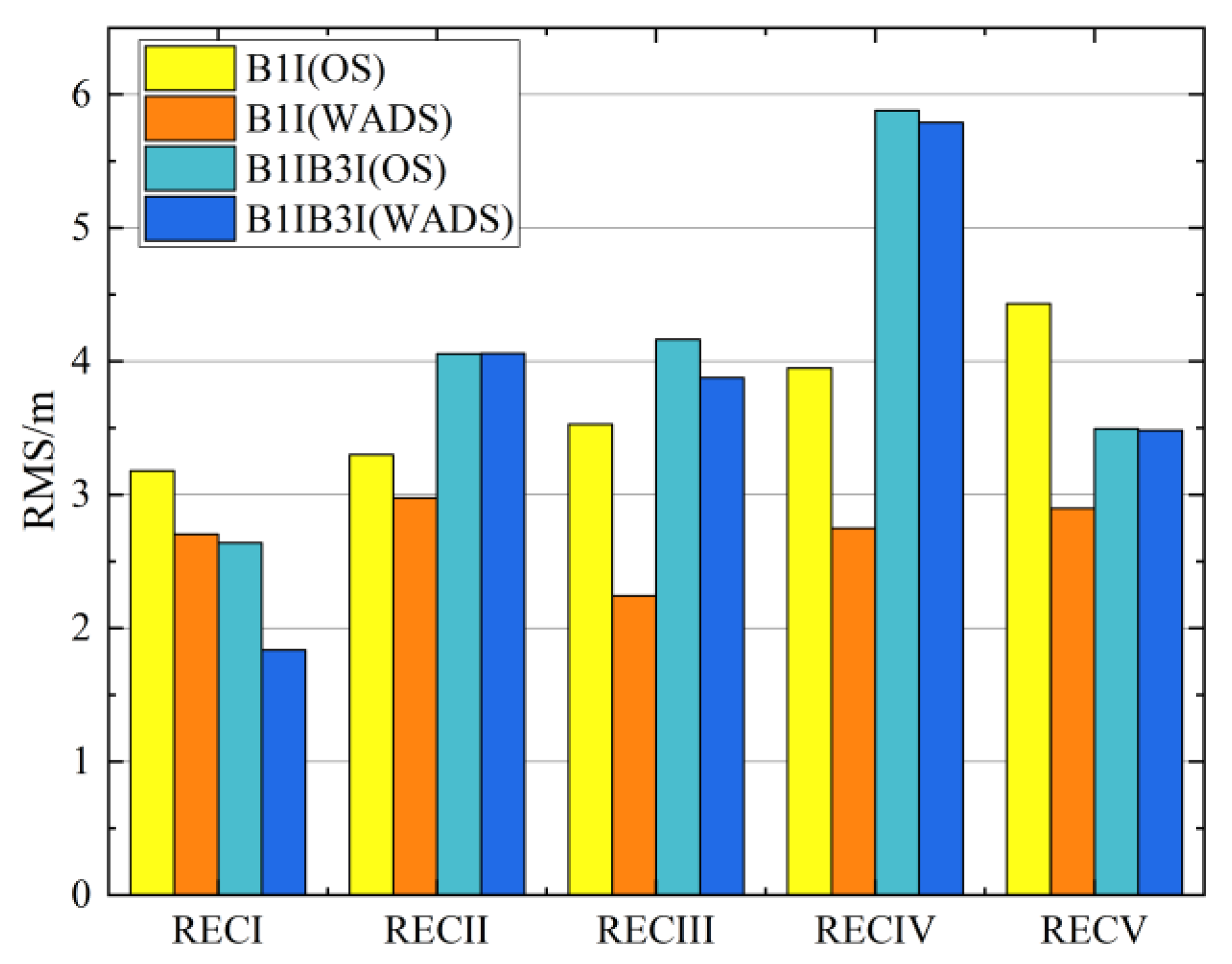
Figure 9.
Figure 9 shows that the B1I positioning accuracies of the five types of receivers under the WADS are less than 3 m, which are significantly improved compared to those under the OS; however, for the B1I/B3I positioning accuracies, only type A receivers under the WADS are less than 3 m, which are significantly improved compared to those under the OS.
Through
Figure 9 and
Table 5, we show that: (1) the B1I positioning accuracies of the five types of receivers under the WADS (type A, type B, type C, type D and type E) are 2.7 m, 3.0 m, 2.2 m, 2.7 m and 2.9 m, which are improved by 15%, 10%, 37%, 30% and 35%, respectively, compared to the B1I positioning accuracies of these receivers under the OS; (2) the B1I/B3I positioning accuracies of these types of receivers under the WADS are 1.8 m, 4.0 m, 3.9 m, 5.8 m and 3.5 m, which change by 30%, 0%, 7%, 2% and 0%, respectively, compared to the B1I/B3I positioning accuracy of these receivers under the OS.
The pseudorange bias of the type B receiver at the B1I frequency is 0.14 m on average and is 1 m on average at the B1I/B3I frequency. This bias is amplified by the IF combination. The IF combination prevents the positioning accuracy from being significantly improved and becoming a non-negligible error for dual-frequency users.
3.3. Improvement after Deducting Pseudorange Bias
To improve the positioning accuracy of the receiver, which is affected by the pseudorange bias, this bias was treated as a kind of error and eliminated in the process of satellite navigation. The double-difference method was used to extract the pseudorange bias of the B1I/B3I signal. When the distance between receiver A and receiver B was close enough (such as less than 10 m), receiver A and satellite j were set as the reference receiver and satellite. Then, the following could be obtained:
The relative pseudorange bias extracted by Equation (16) could be set as an error and subtracted from the UERE to eliminate a part of the common bias:
The relative pseudorange bias
of receiver B to satellite j relative to receiver A to satellite j was simplified as
. According to the number of observations by receiver B, the observation equation set was formed and Equation (18) could be obtained:
where,
are the coordinates of receiver B,
are the coordinates of satellite n,
is the geometric distance between satellite n and receiver B,
is the coordinate accuracy of receiver B and
is the clock error of receiver B.
According to Equation (18), the least square method was used to calculate the coordinate accuracy and clock error accuracy of receiver B. To avoid the rank deficit of the equation, the number of available satellites n had to be greater than 4. Equation (18) shows that all satellites have the same constant bias from the UERE of satellite j to receiver B. This bias is eventually transferred to the receiver clock error and affects the timing accuracy of the navigation system for the user.
To verify the effectiveness of this method, type B and type C receivers were taken as examples. The positioning accuracies of these receivers under the OS and the WADS from 1 to 14 December 2019 were calculated after eliminating the pseudorange bias and the results are shown in
Table 6.
Compared to
Table 5,
Table 6 shows the following: (1) the positioning accuracy on the B1I/B3I frequency is effectively improved by eliminating the pseudorange bias. Under the OS, the positioning accuracies of the type B and type C receivers are 3.45 m and 3.88 m and increase by 15% and 14%, respectively, compared to the original result. Under the WADS, the positioning accuracies of the type B and type C receivers are 2.87 m and 3.30 m and increase by 29% and 15%, respectively. (2) After eliminating the influence of the pseudorange bias, the positioning accuracies on the B1I/B3I frequency of the type B and type C receivers under the WADS are increased by 17% and 8%, respectively, compared to the positioning accuracy in the OS. (3) There is no apparent improvement in the positioning accuracy on the B1I frequency by eliminating the pseudorange bias. Under the OS, the positioning accuracies of the type B and type C receivers are 3.22 m and 4.06 m and increase by 2% and −15%, respectively. Under the WADS, the positioning accuracies of the type B and type C receivers are 2.70 m and 2.52 m and increase by 9% and −13%, respectively.
The pseudorange bias extracted by double-difference observations was related to the reference receiver and reference satellite.
Figure 9 shows that the type C receivers were distant from the type A receivers, which meant that the result of the pseudorange bias for the type C receiver was influenced by the residual errors of the model corrections. Due to this, the improvement in the positioning accuracy on the B1I/B3I frequency of the type C receiver under the WADS is lower than that of the type B receiver. Compared to the B1I/B3I frequency, the pseudorange bias of the B1I frequency is smaller, which is obviously affected by the residual errors of the model corrections. The positioning accuracy of type C receivers is also not improved by eliminating the pseudorange bias.


 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}