
The Simultaneous Prediction of Soil Properties and Vegetation Coverage from Vis-NIR Hyperspectral Data with a One-Dimensional Convolutional Neural Network: A Laboratory Simulation Study

Abstract
:
1. Introduction
2. Materials and Methods
2.1. Experimental Design
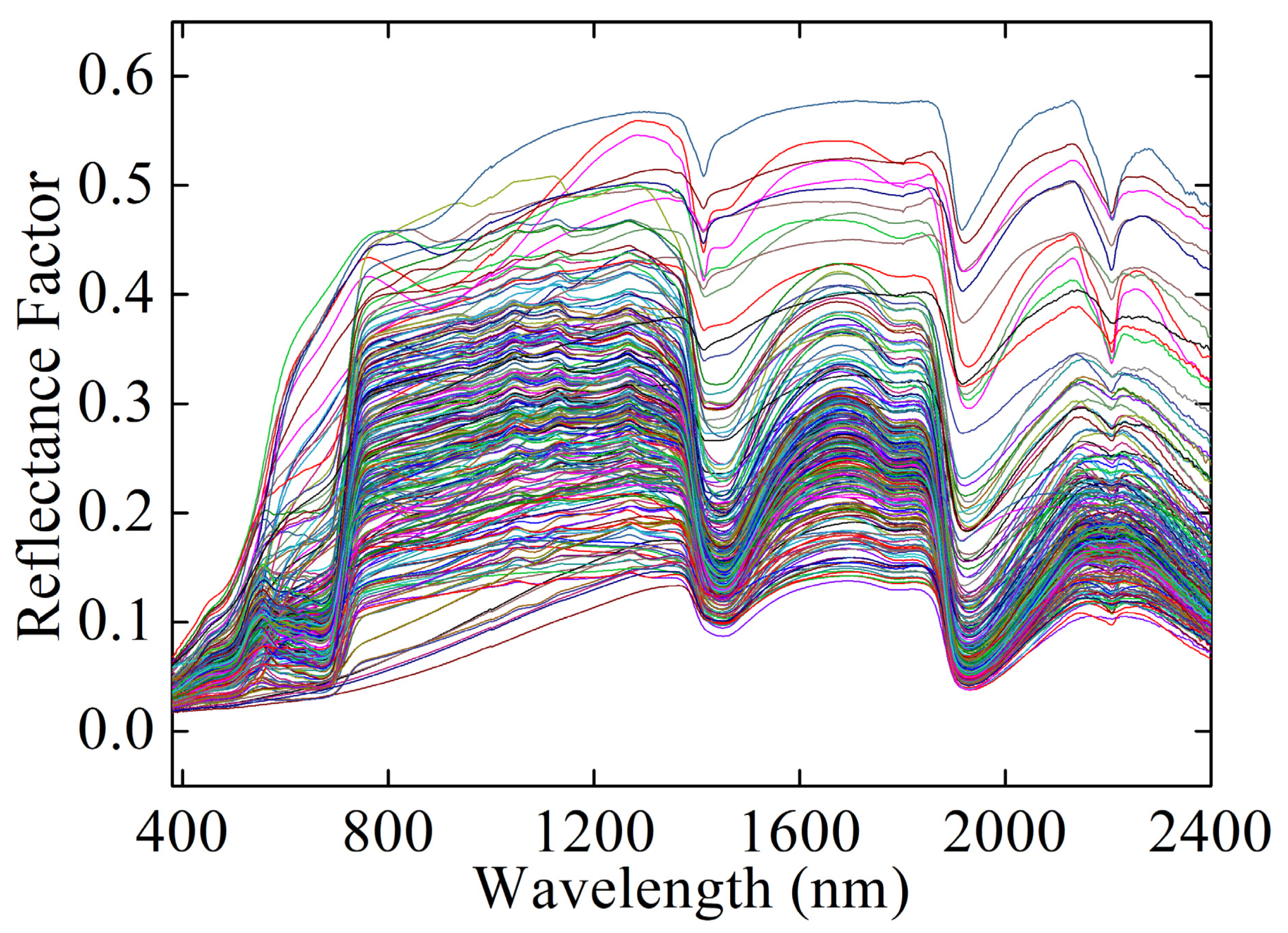
2.2. Spectra Collection
2.3. Data Preparation
2.4. Models
2.4.1. Partial Least-Squares Regression (PLSR)
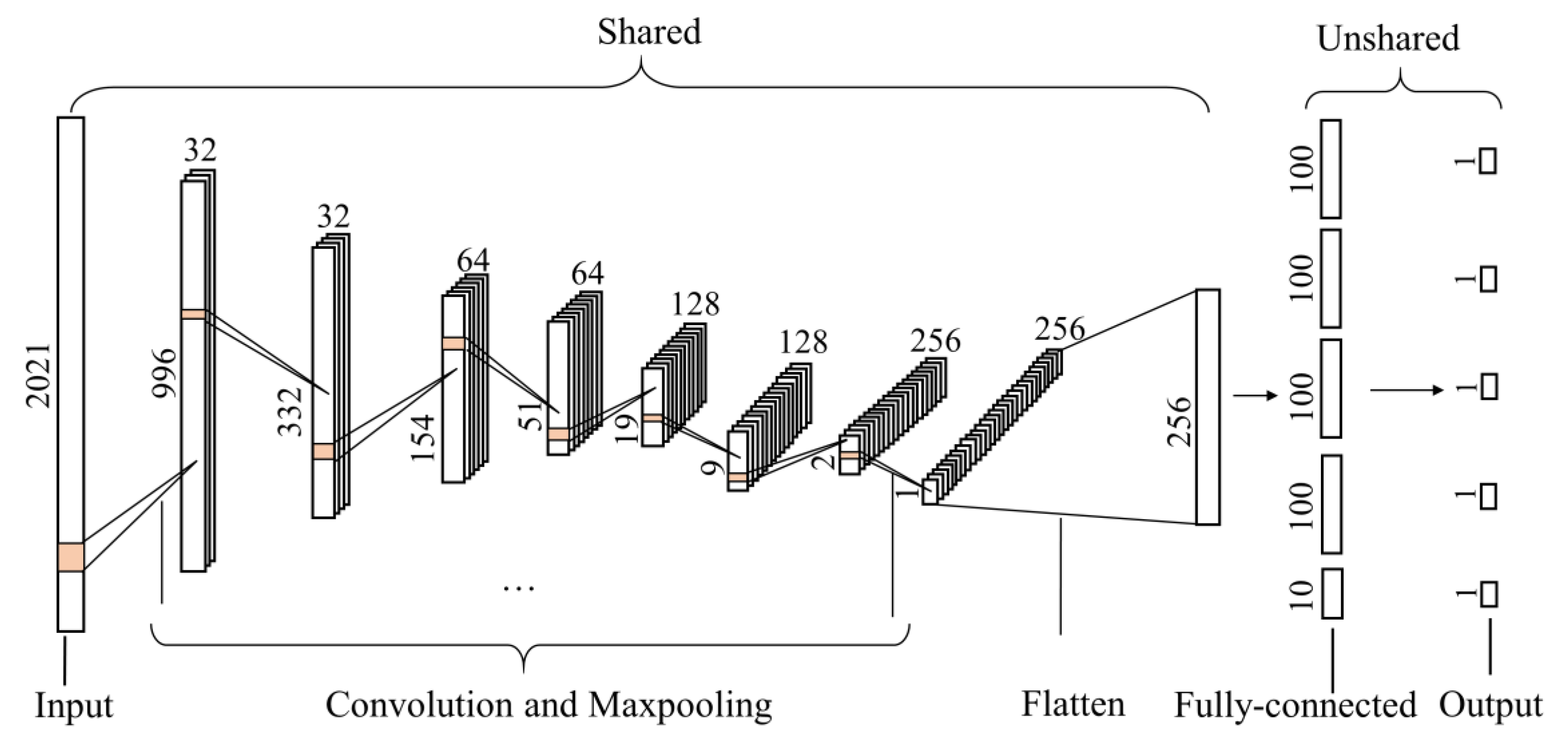
2.4.2. One-Dimension Convolutional Neural Network (1DCNN)
2.5. Implementation
2.6. Model Performance
3. Results
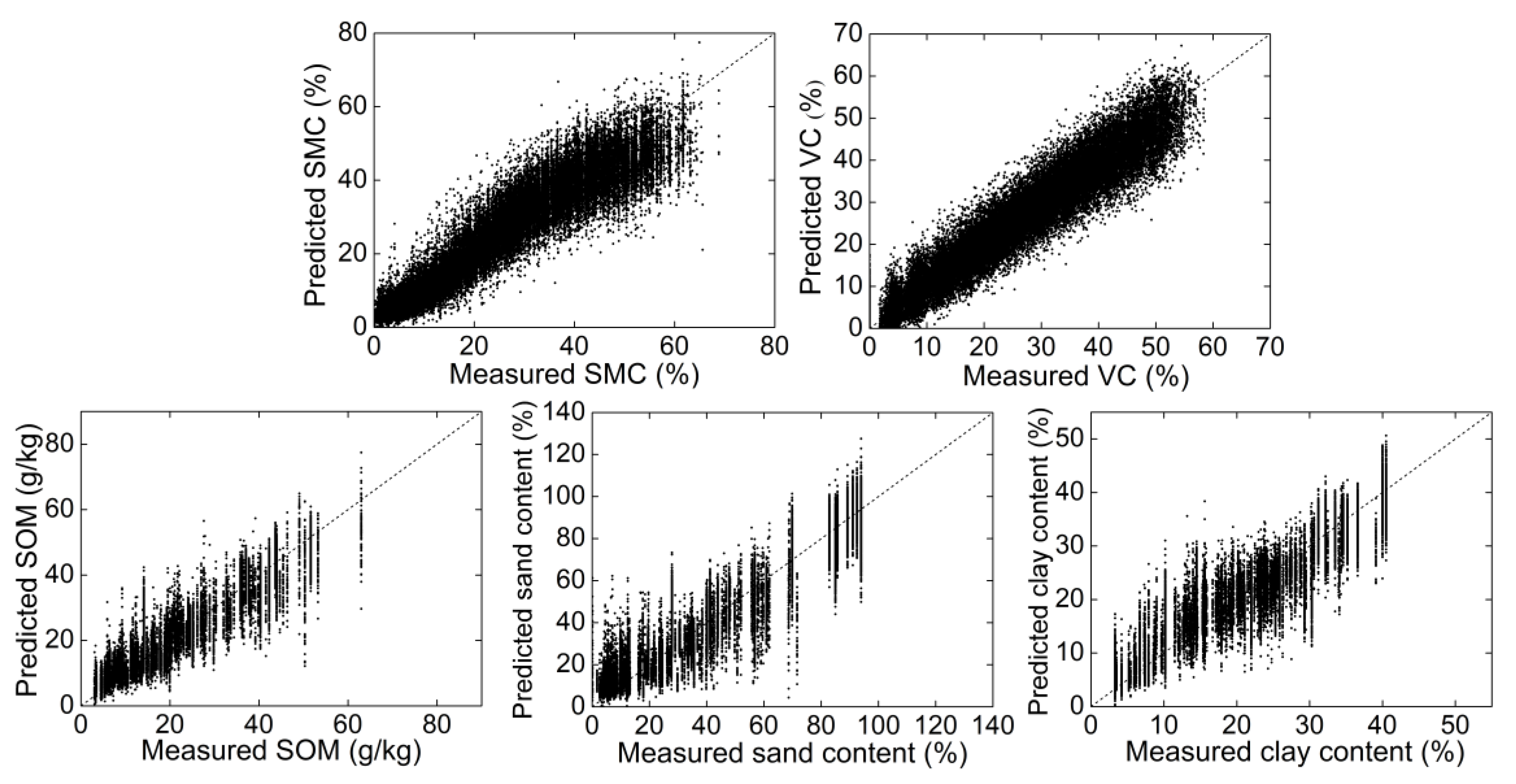
3.1. Results of 1DCNN
3.2. Comparison between 1DCNN and PLSR
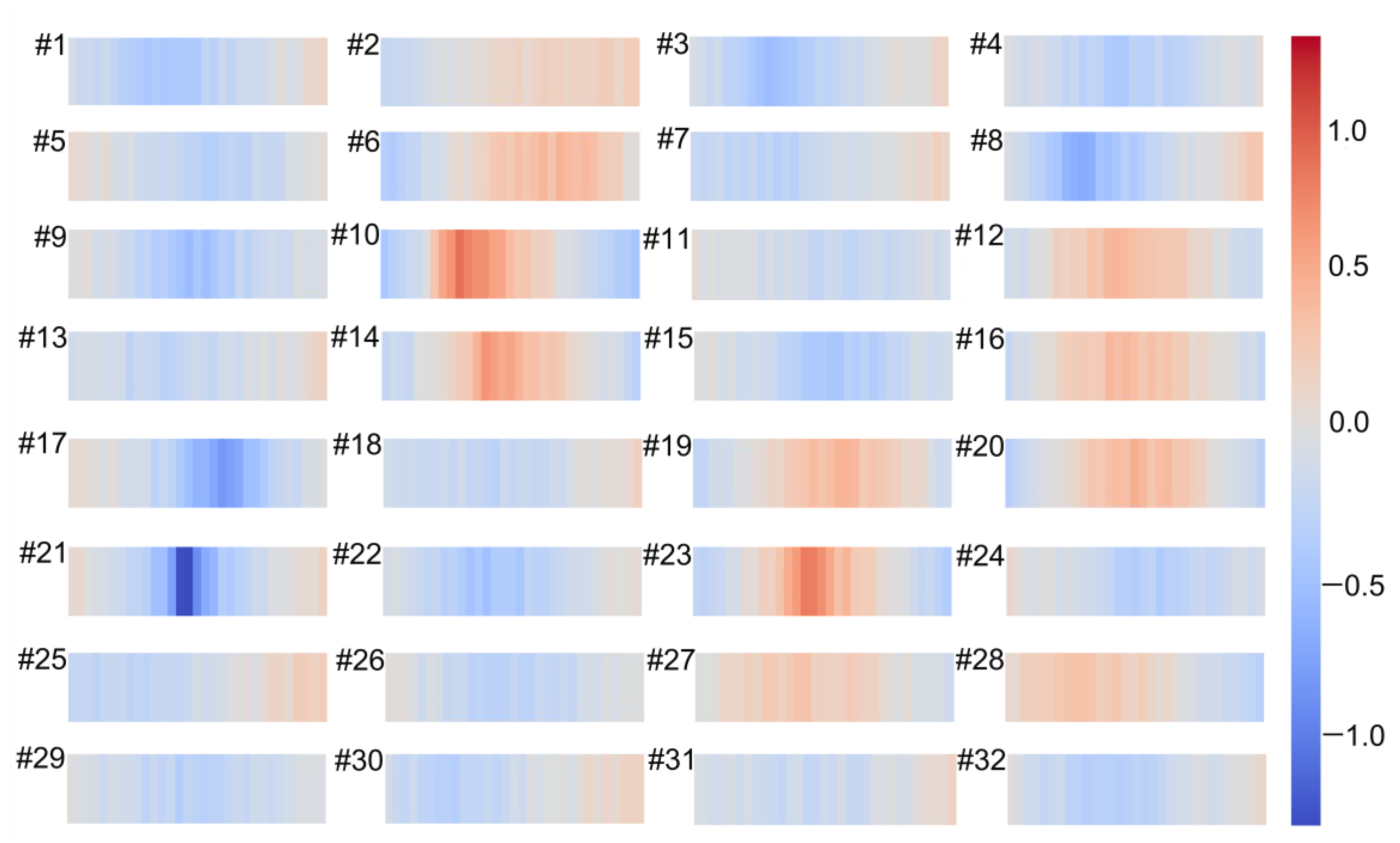
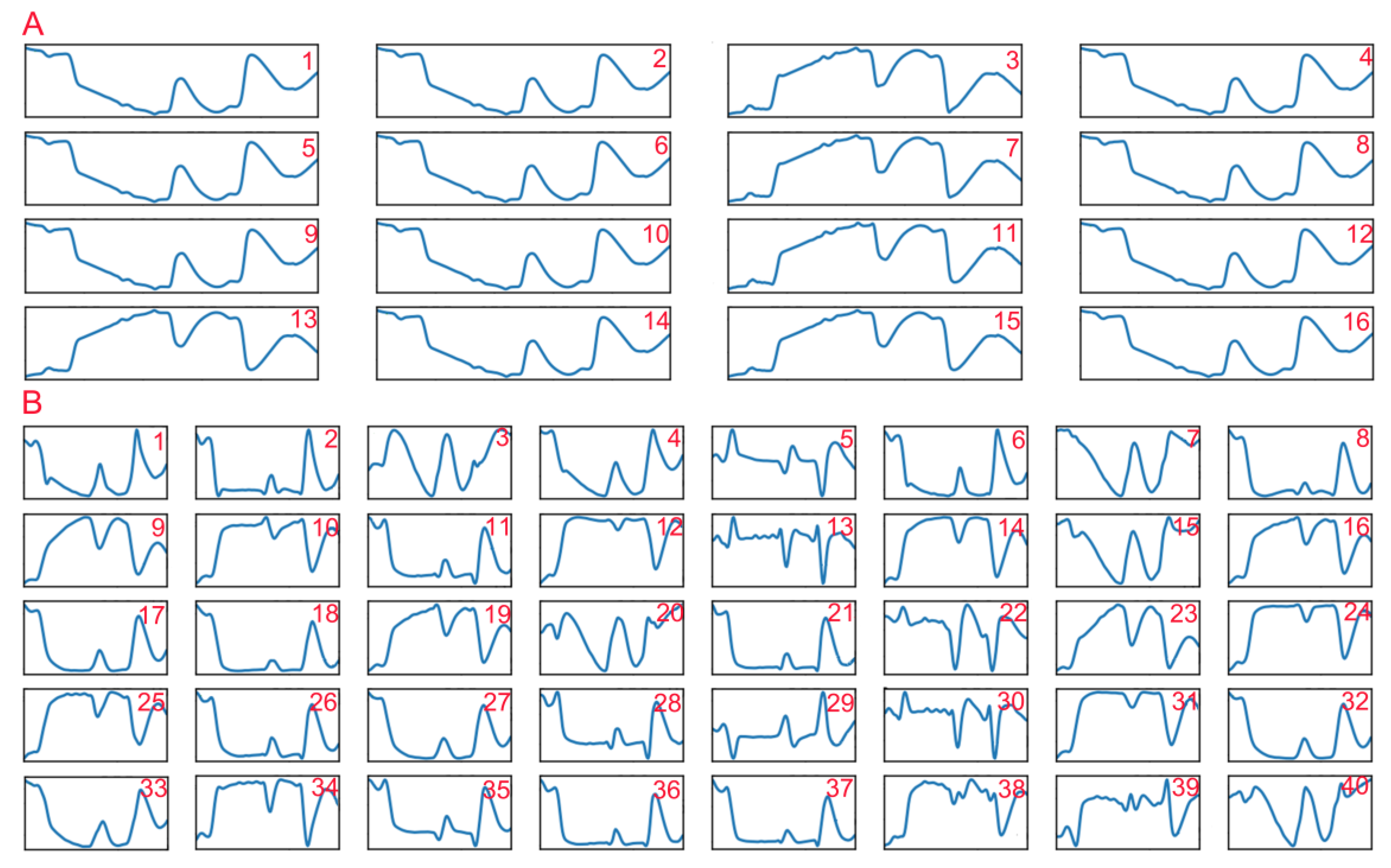
3.3. Visualization of 1DCNN
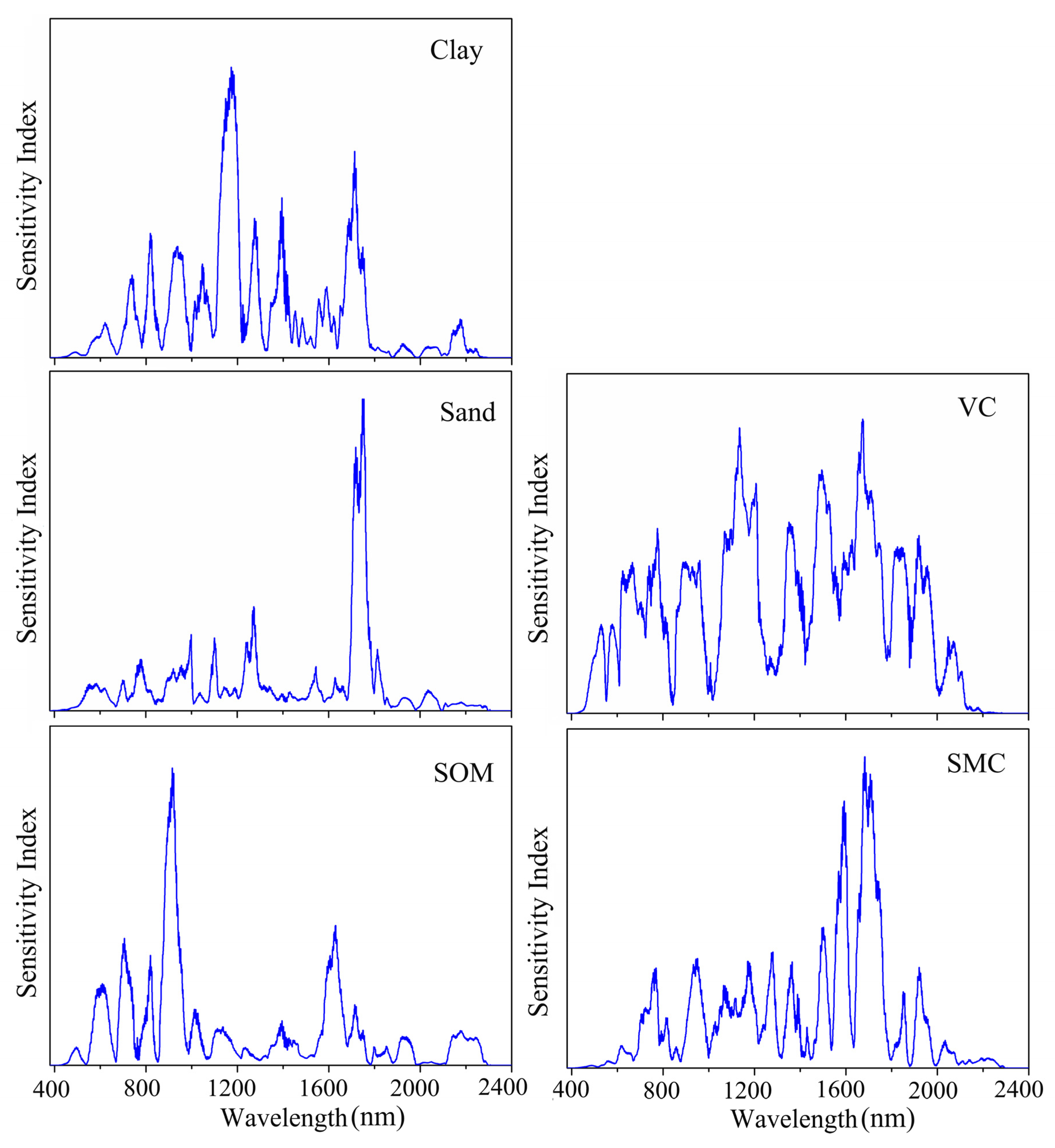
3.4. Determination of Important Wavelengths of 1DCNN
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hill, J. Remote Sensing of Surface Properties. The Key to Land Degradation and Desertification Assessments. In Sustainable Land Use in Deserts; Springer: Berlin/Heidelberg, Germany, 2001; pp. 243–254. [Google Scholar]
- Castaldi, F.; Casa, R.; Castrignanò, A.; Pascucci, S.; Palombo, A.; Pignatti, S. Estimation of soil properties at the field scale from satellite data: A comparison between spatial and non-spatial techniques. Eur. J. Soil Sci. 2014, 65, 842–851. [Google Scholar] [CrossRef]
- Ayehu, G.; Tadesse, T.; Gessesse, B.; Yigrem, Y. Soil Moisture Monitoring Using Remote Sensing Data and a Stepwise-Cluster Prediction Model: The Case of Upper Blue Nile Basin, Ethiopia. Remote Sens. 2019, 11, 125. [Google Scholar] [CrossRef] [Green Version]
- Wiesmair, M.; Feilhauer, H.; Magiera, A.; Otte, A.; Waldhardt, R. Estimating Vegetation Cover from High-Resolution Satellite Data to Assess Grassland Degradation in the Georgian Caucasus. Mt. Res. Dev. 2016, 36, 56–65. [Google Scholar] [CrossRef] [Green Version]
- Keshava, N.; Mustard, J.F. Spectral unmixing. IEEE Signal. Process Mag. 2002, 19, 44–57. [Google Scholar] [CrossRef]
- Borel, C.C.; Gerstl, S.A. Nonlinear spectral mixing models for vegetative and soil surfaces. Remote Sens. Environ. 1994, 47, 403–416. [Google Scholar] [CrossRef]
- Gholizadeh, A.; Borůvka, L.; Saberioon, M.; Vašát, R. A memory-based learning approach as compared to other data mining algorithms for the prediction of soil texture using diffuse reflectance spectra. Remote Sens. 2016, 8, 341. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.; Xu, D.; Chen, S.; Li, H.; Shi, Z. Evaluation of machine learning approaches to predict soil organic matter and pH using vis-NIR spectra. Sensors 2019, 19, 263. [Google Scholar] [CrossRef] [Green Version]
- Zhu, Y.; Weindorf, D.C.; Chakraborty, S.; Haggard, B.; Johnson, S.; Bakr, N. Characterizing surface soil water with field portable diffuse reflectance spectroscopy. J. Hydrol. 2010, 391, 133–140. [Google Scholar] [CrossRef]
- Dennison, P.E.; Qi, Y.; Meerdink, S.K.; Kokaly, R.F.; Thompson, D.R.; Daughtry, C.S.T.; Quemada, M.; Roberts, D.A.; Gader, P.D.; Wetherley, E.B.; et al. Comparison of methods for modeling fractional cover using simulated satellite hyperspectral imager spectra. Remote Sens. 2019, 11, 2072. [Google Scholar] [CrossRef]
- Chen, S.; Xu, D.; Li, S.; Ji, W.; Yang, M.; Zhou, Y.; Hu, B.; Xu, H.; Shi, Z. Monitoring soil organic carbon in alpine soils using in situ vis-NIR spectroscopy and a multilayer perceptron. Land Degrad. Dev. 2020, 31, 1026–1038. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, X.; Guo, X.; Guo, J. Deep learning application for predicting soil organic matter content by VIS-NIR spectroscopy. Comput. Intell. Neurosci. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Zhang, F.; Wu, S.; Liu, J.; Wang, C.; Guo, Z.; Xu, A.; Pan, K.; Pan, X. Predicting soil moisture content over partially vegetation covered surfaces from hyperspectral data with deep learning. Soil Sci. Soc. Am. J. 2021, 85, 989–1001. [Google Scholar] [CrossRef]
- Ng, W.; Minasny, B.; Montazerolghaem, M.; Padarian, J.; Ferguson, R.; Bailey, S.; McBratney, A.B. Convolutional neural network for simultaneous prediction of several soil properties using visible/near-infrared, mid-infrared, and their combined spectra. Geoderma. 2019, 352, 251–267. [Google Scholar] [CrossRef]
- Tsakiridis, N.L.; Keramaris, K.D.; Theocharis, J.B.; Zalidis, G.C. Simultaneous prediction of soil properties from VNIR-SWIR spectra using a localized multi-channel 1-D convolutional neural network. Geoderma. 2020, 367, 114208. [Google Scholar] [CrossRef]
- Padarian, J.; Minasny, B.; McBratney, A.B. Using deep learning to predict soil properties from regional spectral data. Geoderma Reg. 2019, 16, e00198. [Google Scholar] [CrossRef]
- Graziani, M.; Andrearczyk, V.; Müller, H. Visualizing and interpreting feature reuse of pretrained CNNs for histopathology. In Proceedings of the Irish Machine Vision and Image Processing Conference (IMVIP 2019), Dubin, Ireland, 28–30 August 2019. [Google Scholar]
- Samek, W.; Binder, A.; Montavon, G.; Lapuschkin, S.; Müller, K. Evaluating the visualization of what a deep neural network has learned. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 2660–2673. [Google Scholar] [CrossRef] [Green Version]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on computer vision, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Adv. Neural Inf. Process. Syst. 2012, 25, 1097–1105. [Google Scholar] [CrossRef]
- Wang, C.; Pan, X. Improving the prediction of soil organic matter using visible and near infrared spectroscopy of moist samples. J. Near Infrared Spectrosc. 2016, 24, 231–241. [Google Scholar] [CrossRef]
- Bahadori, M.; Tofighi, H. Investigation of soil organic carbon recovery by the Walkley-Black method under diverse vegetation systems. Soil Sci. 2017, 182, 101–106. [Google Scholar] [CrossRef]
- Ashworth, J.; Keyes, D.; Kirk, R.; Lessard, R. Standard procedure in the hydrometer method for particle size analysis. Commun. Soil Sci. Plant. Anal. 2001, 32, 633–642. [Google Scholar] [CrossRef]
- Hassanein, M.; Lari, Z.; El-Sheimy, N. A new vegetation segmentation approach for cropped fields based on threshold detection from hue histograms. Sensors 2018, 18, 1253. [Google Scholar] [CrossRef] [Green Version]
- Ballard, D.H. Generalizing the Hough transform to detect arbitrary shapes. Pattern Recognit. 1981, 13, 111–122. [Google Scholar] [CrossRef] [Green Version]
- Djuris, J.; Ibric, S.; Djuric, Z. Chemometric methods application in pharmaceutical products and processes analysis and control. In Computer-Aided Applications in Pharmaceutical Technology; Djuris, J., Ed.; Woodhead Publishing: Sawston, UK, 2013; pp. 57–90. [Google Scholar]
- Kawamura, K.; Nishigaki, T.; Andriamananjara, A.; Rakotonindrina, H.; Tsujimoto, Y.; Moritsuka, N.; Rabenarivo, M.; Razafimbelo, T. Using a One-Dimensional Convolutional Neural Network on Visible and Near-Infrared Spectroscopy to Improve Soil Phosphorus Prediction in Madagascar. Remote Sens. 2021, 13, 1519. [Google Scholar] [CrossRef]
- Chen, Y.; Li, L.; Whiting, M.; Chen, F.; Sun, Z.; Song, K.; Wang, Q. Convolutional neural network model for soil moisture prediction and its transferability analysis based on laboratory Vis-NIR spectral data. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102550. [Google Scholar] [CrossRef]
- Haghi, R.K.; Pérez-Fernández, E.; Robertson, A.H.J. Prediction of various soil properties for a national spatial dataset of Scottish soils based on four different chemometric approaches: A comparison of near infrared and mid-infrared spectroscopy. Geoderma. 2021, 396, 115071. [Google Scholar] [CrossRef]
- Liu, S.; Shi, Q. Multitask deep learning with spectral knowledge for hyperspectral image classification. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1–5. [Google Scholar] [CrossRef] [Green Version]
- Ranjan, R.; Patel, V.M.; Chellappa, R. HyperFace: A deep multi-task learning framework for face detection, landmark localization, pose estimation, and gender recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 41, 121–135. [Google Scholar] [CrossRef] [Green Version]
- Ruder, S. An overview of multi-task learning in deep neural networks. arXiv 2017, arXiv:1706.05098. [Google Scholar]
- Yatabe, K.; Masuyama, Y.; Oikawa, Y. Rectified Linear Unit Can Assist Griffin-Lim Phase Recovery. In Proceedings of the 16th International Workshop on Acoustic Signal Enhancement (IWAENC), Tokyo, Japan, 17–20 September 2018; pp. 555–559. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Perez-Lapillo, J.; Galkin, O.; Weyde, T. Improving Singing Voice Separation with the Wave-U-Net Using Minimum Hyperspherical Energy. In Proceedings of the 2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 3272–3276. [Google Scholar] [CrossRef] [Green Version]
- Choi, K.; Medley, J.K.; König, M.; Stocking, K.; Smith, L.; Gu, S.; Sauro, H.M. Tellurium: An extensible python-based modeling environment for systems and synthetic biology. BioSystems 2018, 171, 74–79. [Google Scholar] [CrossRef]
- Bellon-Maurel, V.; Fernandez-Ahumada, E.; Palagos, B.; Roger, J.M.; McBratney, A. Critical review of chemometric indicators commonly used for assessing the quality of the prediction of soil attributes by NIR spectroscopy. TrAC. Trends Analyt. Chem. 2010, 29, 1073–1081. [Google Scholar] [CrossRef]
- Chang, C.W.; Laird, D.A.; Mausbach, M.J.; Hurburgh, C.R. Near-infrared reflectance spectroscopy—principal components regression analyses of soil properties. Soil Sci. Soc. Am. J. 2001, 65, 480–490. [Google Scholar] [CrossRef] [Green Version]
- Terhoeven-Urselmans, T.; Vagen, T.G.; Spaargaren, O.; Shepherd, K.D. Prediction of soil fertility properties from a globally distributed soil mid infrared spectral library. Soil Sci. Soc. Am. J. 2010, 74, 1792–1799. [Google Scholar] [CrossRef] [Green Version]
- Ng, W.; Minasny, B.; de Sousa Mendes, W.; Demattê, J. Estimation of effective calibration sample size using visible near infrared spectroscopy: Deep learning vs. machine learning. Soil Discuss. 2019, 1–21. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Li, Y.; Song, Y.; Rong, X. The Influence of the Activation Function in a Convolution Neural Network Model of Facial Expression Recognition. Appl. Sci. 2020, 10, 1897. [Google Scholar] [CrossRef] [Green Version]
- Wang, H.; Wang, Y.; Lou, Y.; Song, Z. The Role of Activation Function in CNN. In Proceedings of the 2020 2nd International Conference on Information Technology and Computer Application (ITCA), Guangzhou, China, 18–20 December 2020; pp. 429–432. [Google Scholar] [CrossRef]
- Nocita, M.; Stevens, A.; Noon, C.; van Wesemael, B. Prediction of soil organic carbon for different levels of soil moisture using Vis-NIR spectroscopy. Geoderma 2013, 199, 37–42. [Google Scholar] [CrossRef]
- Verhoef, W. Light scattering by leaf layers with application to canopy reflectance modeling: The SAIL model. Remote Sens. Environ. 1984, 16, 125–141. [Google Scholar] [CrossRef] [Green Version]
- Tsakiridis, N.L.; Tziolas, N.V.; Theocharis, J.B.; Zalidis, G.C. A genetic algorithm-based stacking algorithm for predicting soil organic matter from vis–NIR spectral data. Eur. J. Soil Sci. 2019, 70, 578–590. [Google Scholar] [CrossRef]
- Jaconi, A.; Vos, C.; Don, A. Near infrared spectroscopy as an easy and precise method to estimate soil texture. Geoderma 2019, 337, 906–913. [Google Scholar] [CrossRef]
- Teixeira, S.; Guimarães, A.M.; Proença, C.A.; Rocha, J.C.F.D.; Caires, E.F. Data Mining Algorithms for Prediction of Soil Organic Matter and Clay Based on Vis-NIR Spectroscopy. Int J. Agric. For. 2014, 4, 310–316. [Google Scholar] [CrossRef]
- Sung, J. Development of nondestructive grouping system for soil organic matter using VIS and NIR spectral reflectance. Agric. Biosyst. Eng. 2005, 6, 15–21. [Google Scholar]
- Lee, K.S.; Lee, D.H.; Sudduth, K.A.; Chung, S.O.; Drummond, S.T. Wavelength Identification for Reflectance Estimation of surface and subsurface soil properties. In Proceedings of the ASAE Annual Meeting, Chicago, IL, USA, 23 August 2007. [Google Scholar]
- Rossel, R.A.V.; Behrens, T. Using data mining to model and interpret soil diffuse reflectance spectra. Geoderma 2010, 158, 46–54. [Google Scholar] [CrossRef]
- Rossel, R.A.V.; Webster, R. Predicting soil properties from the Australian soil visible–near infrared spectroscopic database. Eur. J. Soil Sci. 2012, 63, 848–860. [Google Scholar] [CrossRef]
- Liu, W.; Baret, F.; Gu, X.; Zhang, B.; Tong, Q.; Zheng, L. Evaluation of methods for soil surface moisture estimation from reflectance data. Int. J. Remote Sens. 2003, 24, 2069–2083. [Google Scholar] [CrossRef]
- Patel, N.K.; Saxena, R.K.; Shiwalkar, A. Study of fractional vegetation cover using high spectral resolution data. J. Indian Soc. Remote Sens. 2007, 35, 73–79. [Google Scholar] [CrossRef]
- Mulder, V.L.; Bruin, S.D.; Schaepman, M.E.; Mayr, T.R. The use of remote sensing in soil and terrain mapping—A review. Geoderma 2011, 162, 1–19. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Wu, S.; Wang, C.; Xu, A.; Pan, X. Hyper-spectral estimation of wheat biomass after alleviating of soil effects on spectra by non-negative matrix factorization. Eur. J. Argon. 2017, 84, 58–66. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | |||||
|---|---|---|---|---|---|
| SOM (g/kg) | Sand (%) | Clay (%) | SMC (%) | VC (%) | |
| Minimum | 3.07 | 0.12 | 3.30 | 0.07 | 0 |
| Maximum | 62.99 | 94.00 | 40.50 | 68.85 | 58.60 |
| Mean | 23.43 | 41.39 | 21.89 | 25.20 | 20.30 |
| Median | 19.53 | 34.70 | 23.10 | 24.09 | 19.09 |
| Q1 | 12.53 | 23.50 | 14.00 | 11.76 | 4.12 |
| Q3 | 36.25 | 56.80 | 31.20 | 37.47 | 34.19 |
| SD | 13.34 | 25.27 | 10.98 | 15.73 | 16.55 |
| Skewness | 0.57 | 0.69 | −0.11 | 0.28 | 0.27 |
| Type | Layers | Filter Size | Filters | Activation |
|---|---|---|---|---|
| Shared | Convolutional + Batch Normalization | 31 | 32 | ReLU |
| Max-pooling | 3 | – | – | |
| Convolutional + Batch Normalization | 25 | 64 | ReLU | |
| Max-pooling | 3 | – | – | |
| Convolutional + Batch Normalization | 15 | 128 | ReLU | |
| Max-pooling | 2 | – | – | |
| Convolutional + Batch Normalization | 7 | 256 | ReLU | |
| Max-pooling | 2 | – | – | |
| Dropout (0.2) | – | – | – | |
| Flatten | – | – | – | |
| Unshared | Fully connected | – | 100/10 | ReLU |
| Fully connected | – | 1 | Linear |
| Model | Properties | R2 † | RMSE † | RPIQ † |
|---|---|---|---|---|
| 1DCNN | SOM (g/kg) | 0.91(0.01) | 4.15(0.32) | 5.78(0.46) |
| Sand (%) | 0.89(0.02) | 8.30(0.67) | 4.01(0.32) | |
| Clay (%) | 0.88(0.02) | 3.82(0.30) | 4.65(0.40) | |
| SMC (%) | 0.90(0.01) | 5.21(0.26) | 4.95(0.30) | |
| VC (%) | 0.95(0.00) | 3.92(0.24) | 7.75(0.45) | |
| PLSR | SOM (g/kg) | 0.71(0.01) | 7.18(0.13) | 3.34(0.08) |
| Sand (%) | 0.63(0.02) | 15.32(0.27) | 2.16(0.05) | |
| Clay (%) | 0.62(0.02) | 6.74(0.19) | 2.62(0.11) | |
| SMC (%) | 0.73(0.01) | 8.20(0.16) | 3.13(0.08) | |
| VC (%) | 0.98(0.00) | 2.41(0.04) | 12.57(0.28) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, F.; Wang, C.; Pan, K.; Guo, Z.; Liu, J.; Xu, A.; Ma, H.; Pan, X. The Simultaneous Prediction of Soil Properties and Vegetation Coverage from Vis-NIR Hyperspectral Data with a One-Dimensional Convolutional Neural Network: A Laboratory Simulation Study. Remote Sens. 2022, 14, 397. https://doi.org/10.3390/rs14020397
Zhang F, Wang C, Pan K, Guo Z, Liu J, Xu A, Ma H, Pan X. The Simultaneous Prediction of Soil Properties and Vegetation Coverage from Vis-NIR Hyperspectral Data with a One-Dimensional Convolutional Neural Network: A Laboratory Simulation Study. Remote Sensing. 2022; 14(2):397. https://doi.org/10.3390/rs14020397
Chicago/Turabian StyleZhang, Fangfang, Changkun Wang, Kai Pan, Zhiying Guo, Jie Liu, Aiai Xu, Haiyi Ma, and Xianzhang Pan. 2022. "The Simultaneous Prediction of Soil Properties and Vegetation Coverage from Vis-NIR Hyperspectral Data with a One-Dimensional Convolutional Neural Network: A Laboratory Simulation Study" Remote Sensing 14, no. 2: 397. https://doi.org/10.3390/rs14020397
APA StyleZhang, F., Wang, C., Pan, K., Guo, Z., Liu, J., Xu, A., Ma, H., & Pan, X. (2022). The Simultaneous Prediction of Soil Properties and Vegetation Coverage from Vis-NIR Hyperspectral Data with a One-Dimensional Convolutional Neural Network: A Laboratory Simulation Study. Remote Sensing, 14(2), 397. https://doi.org/10.3390/rs14020397