
Low-Complexity 2D DOA Estimation and Self-Calibration for Uniform Rectangle Array with Gain-Phase Error

Air and Missile Defense College, Air Force Engineering University, Xi’an 710051, China
*
Author to whom correspondence should be addressed.
Remote Sens. 2022, 14(13), 3064; https://doi.org/10.3390/rs14133064
Submission received: 24 May 2022
/
Revised: 23 June 2022
/
Accepted: 23 June 2022
/
Published: 26 June 2022
(This article belongs to the Topic Advances in Array Signal Processing with Errors: Models, Algorithms and Applications)
Abstract
:Most subspace-based algorithms need exact array manifold for direction of arrival (DOA) estimation, while, in practical applications, the gain-phases of different array elements are usually inconsistent, degrading their estimation performance. In this paper, a novel low-complexity 2D DOA and gain-phase error estimation algorithm is proposed by adding auxiliary array elements in a uniform rectangular array (URA). Firstly, the URA is modeled as the Kronecker product of two uniform linear arrays (ULAs) to decouple the 2D DOA estimation. Then, several well-calibrated auxiliary array elements are added in the two ULAs, based on which the rotation invariant factor of the URA destroyed by the gain-phase error is reconstructed by solving constrained optimization problems. Lastly, ESPRIT is used to estimate the 2-D DOA and the gain-phase error coefficients. The closed-form expressions of the estimation CRBs are also derived, providing insight into the impact of gain-phase error on DOA estimation. Simulation results are used to validate the effectiveness of the proposed algorithm and the correctness of the theoretical analysis.
1. Introduction
In the research field of array signal processing, direction of arrival (DOA) estimation [1,2,3] has occupied a fundamental position in radar, sonar, and communication systems. At present, many DOA estimation algorithms have been proposed in the one-dimensional (1D) spatial domain, while most arrays in actual systems are rectangular planar arrays. Therefore, study on the two-dimensional (2D) DOA estimation is obviously more meaningful. Many algorithms have been used to estimate the 2D DOAs for uniform rectangle array (URA) [4,5,6], while the effectiveness of these algorithms depends on the precisely known array manifold. In practice, there are inherent unknown antenna array errors, inevitably disturbing the array manifold. If not considered, the performance of these 2D DOA estimation algorithms will be seriously deteriorated [7,8].
According to their different influences on received signals, array errors can be summarized into three categories: mutual coupling, gain-phase error, and position error. Compared with the other two kinds of array errors, gain-phase error is more common in practice. For the calibration of gain-phase error, the algorithms proposed in the early stage require one or several well-calibrated sources as the prior information [9,10]. In order to realize the self-calibration of gain-phase error without well-calibrated sources, a gain-phase blind calibration method was proposed for a linear array with non-Gaussian sources in [11], where the independent component analysis is used to estimate the product of the array error matrix and the array response matrix. By exploiting the ESPRIT algorithm, an approach for DOA and gain-phase estimation was proposed in [12], where the unknown DOAs and gain-phases can be estimated in the closed form without performing a spectral search. Based on a central symmetric array (CSA), the problem of DOA estimation for noncircular sources in the presence of sensor gain-phase uncertainties was studied in [13]. Then, the mixed far-field and near-field source localization was concerned in [14] with the CSA under the condition of gain-phase perturbations. A DOA estimation method based on the errors-in-variables model, i.e., the simultaneous orthogonal matching pursuit-total least squares algorithm, was proposed in [15], where the sparsity of the received signal is exploited. By using the sparse representation technique, an optimization method for direction finding with unknown gain-phase in the presence of spatially non-uniform noise was proposed in [16]. However, all the algorithms mentioned above are proposed for linear arrays and cannot be easily extended to 2D DOA estimation for planar arrays.
To realize 2D DOA estimation in the presence of gain-phase error, a gain-phase calibration algorithm based on subspace was proposed for 2D array in [17]. A simple and robust least-squares algorithm for joint 2D DOA estimation and phase calibration was presented in [18] for URA, while the phase and DOA parameters cannot be identified together without ambiguity when performing phase autocalibration. In study [19], an efficient three-step-iteration algorithm was performed to provide a robust DOA estimator for large URAs in underwater sonar imaging systems. Without the need of good initial guesses, a MUSIC-like iterative calibration algorithm, which uses the improved 2D MUSIC algorithm, was proposed in [20] for the planar equispaced array (PEA). In study [21], by exploiting one well-calibrated incident signal, the 2D DOA and gain-phase error were estimated via the mixing matrix obtained by blind signal separation for a large-scale planar array. Although 2D DOA estimation can be achieved in the presence of gain-phase error, most of the above algorithms need to perform spectral peak search or iterative operation, increasing their computational complexities.
In this study, a novel low-complexity algorithm for 2D DOA and gain-phase error estimation is proposed for URA. The URA is modeled as the Kronecker product of two uniform linear arrays (ULAs) and several well-calibrated auxiliary elements are added into the two ULAs, respectively. Then, the rotation invariances destroyed by the gain-phase error are reconstructed by solving two constrained optimization problems, so that the ESPRIT algorithm can be used for 2D DOA estimation. During the 2D DOA estimation process, the proposed algorithm does not need any gain-phase error information of the URA and can realize the unambiguous joint 2D DOA and gain-phase error coefficient estimation without spectral peak search or iteration operation. Thus, the proposed algorithm has low computational complexity.
Notation:, ⊙, and ◦ denote Kronecker product, Hadamard product, and Khatri-Rao product, respectively. diag[∙] denotes the diagonal matrix formed by a column or row vector, vecd[∙] denotes the column vector formed by the diagonal elements of a matrix. trace[∙] denotes the trace of a matrix. Re(∙) denotes the real part of a plural. arccos[∙] denotes the inverse cosine. E[∙] denotes the expected value. denotes the Frobenius norm. denotes the ceiling function. (∙)*, (∙)T, (∙)H, (∙)−1, and (∙)# denote complex conjugate, transpose, Hermitian transpose, matrix inverse, and pseudo-inverse, respectively. Ia denotes an a × a identity matrix. 0a×b denotes an a × b zero matrix.
2. Signal Model of URA with Gain-Phase Error
As shown in Figure 1, consider that a URA is located on the x-y plane with Nx2 × Ny2 elements and the distance between the adjacent elements is λ/2, where Nx2 and Ny2 denote the number of array elements along x-axis and y-axis, and λ is wavelength of the received signal. To tackle with the problem of gain-phase error, some well-calibrated auxiliary array elements are added to the URA. The distance between the adjacent auxiliary array elements and the distance between the original URA and the auxiliary array are both λ/2. The position of the (m, n)-th array element is (m, n) × λ/2 with , , , and . For convenience, we use the auxiliary array element located at (0, 0) as the reference.
Assume that there are P noncoherent far-field sources located at the same range and the 2D DOA of the p-th source with respect to the x-axis and the y-axis are and . Then, the received signal of the original URA can be expressed as
where xmn denotes the received signal of the (m, n)-th array element, is amplitude of the p-th source, denotes the noise vector, modeled as a zero-mean spatially white Gaussian noise with the covariance matrix of . is the gain-phase error matrix, gmn and denote the gain and phase error of the (m, n)-th array element, and is the steering vector of the original URA corresponding to the p-th source, described as . It can be seen that the URA can be modeled as the Kronecker product of two ULAs located on the x-axis and y-axis, and thus the 2D DOA can be decoupled.
Similar to Equation (1), the received signal of the extended URA can be expressed as
where , , is the steering vector of the extended URA corresponding to the pth source with and .
Equation (2) can be rewritten in the matrix form as
where , , , is the source amplitude vector and is the zero-mean spatially white Gaussian noise vector of the extended URA with the covariance matrix of .
The covariance matrix of y(t) can be expressed as
By conducting eigenvalue decomposition of , the signal subspace and the noise subspace can be obtained. Since the signal subspace Us and the steering matrix span the same subspace, they have the following relationship
where T is a nonsingular matrix.
In the case with finite snapshots, the covariance matrix of y(t) can be estimated by
3. The Proposed Algorithm
3.1. Algorithm Description
Define the following selective matrix
where Jx1 and Jx2 are the (Nx-1)×Nx submatrices formed by the first and the last Nx-1 rows and , Jy1, and Jy2 are the (Ny-1)×Ny submatrices formed by the first and the last Ny-1 rows of .
Assume , , , , , , where ax1 and ax2 are the first and the last Nx-1 elements of ax; ay1 and ay2 are the first and the last Ny-1 elements of ay. According to the signal model given in Equation (3), the ESPRIT algorithm cannot be directly used to estimate the 2D DOA due to the existence of gain-phase error, while the following proposition makes it possible to reconstruct the rotation invariances of the URA destroyed by the gain-phase error.
Proposition 1.
Let Ux1, Ux2and Uy1, Uy2be the submatrices formed from Us in the same way with Ax1, Ax2and Ay1, Ay2formed from A; the extended URA have the following rotation invariances along the x-axis and y-axis
where , is a diagonal matrix formed by the diagonal elements of without , is a diagonal matrix formed by the diagonal elements of without ; , is a diagonal matrix formed by the diagonal elements of without , is a diagonal matrix formed by the diagonal elements of without , , , , .
Proof.
By multiplying the selective matrices Fx1, Fx2, Fy1, Fy2 by , we have
According to Equation (5), the relationships between Ux1, Ux2, Uy1, Uy2 and Bx1, Bx2, By1, By2 can be expressed as
Substitute and into (11a) and (11b) respectively, which can obtain the rotation invariances given in (8a) and (8b).
The unknown , , , and can be obtained by solving the following constrained optimization problems
where , ,, and .
Based on the minimum mean square error (MMSE) criterion, and in (12a) and (12b) can be obtained as
Substitute Equation (13) into Equation (12), and the constrained optimization problems can be rewritten as
where and .
In Equation (14a), we have
where .
Equation (15) is derived with the help of the following relationships
where F and H are n × n matrices, , and z is a n × 1 vector. Similar to Equation (15), in Equation (14b) we have [12]
where .
Substitute Equations (15) and (18) into Equation (14a,b), and we have
Then, based on the Lagrange operator method, Equation (19a,b) can be solved, giving
According to the expression of and the definitions of and , the expression of dx can be described as
According to Equation (21), the i-th () gain-phase error coefficient of the original URA can be calculated from Equation (20a) as
where .
We note that, apart from Equation (22), can also be calculated by in Equation (20b) or by the average of and , which is not repeated here for simplification.
Substitute Equation (20a,b) into Equation (13a,b), respectively, and and can be estimated as
Denoting , and as the eigenvalues and eigenvectors of , the DOA corresponding to the x-axis can be estimated as
It can be seen from the expressions of and that they have the same eigenvector for the same source. Therefore, the eigenvalues of can be obtained by
Hence, the DOA corresponding to the y-axis can be estimated as
It should be pointed out that the eigenvalue decomposition of can be avoided by Equation (25), thus reducing the computational complexity of the proposed algorithm. At the same time, the automatic pairing of the estimated 2D DOAs can be realized by Equations (24) and (26). □
3.2. Algorithm Summary
The proposed low-complexity 2D DOA estimation and gain-phase self-calibration algorithm can be summarized in the following five steps:
Step 1. Estimate the covariance matrix of the extended URA via Equation (6) and then obtain the signal subspace by the eigenvalue composition of .
Step 2. Construct Ux1, Ux2 and Uy1, Uy2 from .
Step 3. Calculate Qx and Qy based on Ux1, Ux2 and Uy1, Uy2.
Step 4. Use Equation (22) to estimate the gain-phase error coefficients, which can be used to self-calibrate the original URA.
Step 5. Estimate the 2D DOAs of all sources according to Equations (23)–(26).
3.3. Algorithm Remarks
Through the description of the proposed algorithm in the previous sub-section, the following qualitative remarks can be drawn:
Remark 1.
In the process of gain-phase error self-calibration for URA, the proposed algorithm does not need any auxiliary well-calibrated sources, thus avoiding the influence of auxiliary source angle errors on the estimation performance.
Remark 2.
Without any iteration and spectral peak search process, the proposed algorithm can avoid the problems of high-dimension, nonlinear search, and local convergence. Thus, the computational complexity of the proposed algorithm can be reduced. Its main computational complexity is focusing on the estimation of covariance matrix , the eigenvalue composition of , the calculation of Qx and Qy, and the eigenvalue composition of and . Therefore, the computational complexity of the proposed algorithm is .
Remark 3.
If the gain-phase error matrix of the original URA satisfies with and having the Vandermonde properties, the 2D DOA estimation and the gain-phase error estimation will be blurred, resulting in large estimation biases [22]. Due to the introduction of well-calibrated auxiliary array elements, whose gain-phase error coefficients are both 1, the gain-phase error matrix of the extended URA does not have the Vandermonde property. Therefore, the proposed algorithm can eliminate the ambiguity caused by the coupling of the DOA and the gain-phase error.
Remark 4.
The implementation of the proposed algorithm does not use the first-order Taylor approximation of the steering vector to simplify the parameter estimation problem, so there is no need to make micro-perturbation assumptions for the gain-phase errors of the URA and thus, it is more consistent with the actual case of array perturbation.
4. Cramer–Rao Bound (CRB)
The CRB provides a lower bound on the variance of the DOA estimator, which can be calculated by taking the inverse of the Fisher information matrix (FIM). For 2D DOA and gain-phase error coefficient estimation for URA, the unknown parameters include
Thus, the FIM can be represented in blocks as
where is the matrix block of the DOA estimations corresponding to x-axis, is the matrix block of the DOA estimations corresponding to y-axis, is the matrix block of the gain error coefficient estimations, is the matrix block of the phase error coefficient estimations, and the rest are the cross-correlation blocks of corresponding parameter estimations.
The element of the FIM can be obtained by [23]
where and the partial derivative of with respect to can be calculated by
where .
Substituting Equation (30) into Equation (29), we can obtain
In order to facilitate the calculation of CRB, a more detailed expression of the FIM is given in Appendix B.
Furthermore, to visually assess the influence of gain-phase errors on the 2D DOA estimation, the FIM is divided into the following blocks
where , . Then, the CRB of the 2D DOA estimation can be obtained as
Since is a positive definite matrix, we have
where denotes the CRB of 2D DOA estimations when the gain-phase error coefficients of the URA are known.
It can be seen from Equation (34) that, when the 2D DOA and the gain-phase error coefficients are estimated at the same time, the CRB becomes larger and the DOA estimation performance will be deteriorated, while in Equation (34) indicates that the performance loss occurs because of the lack of gain-phase error information, which will be confirmed by the simulations in the Section 5.
5. Simulation Results
In this section, simulation results are presented to validate the proposed algorithm.
Consider a URA with Nx2 = 4, Ny2 = 5, and its gain-phase error coefficients are generated by [14]
where and are independent and identically distributed random variables over [−0.5 0.5], and and are the standard deviations of and , respectively. In the following simulations, and are set as 0.1 and 15°.
Assume there are 3 noncoherent far-field sources located at the same range, whose 2D DOAs are , , and .
5.1. Estimated 2D DOAs and Gain-Phase Error Coefficients
In the first simulation, the number of auxiliary array elements along x-axis and y-axis are set as Nx1 = 2 and Ny1 = 3, respectively, signal-to-noise ratio (SNR) is set as 10 dB, the Monte Carlo trial number is set as 50, and the number of snapshots is set as L = 256. Figure 2 shows the 2D DOAs estimated by the proposed algorithm. Table 1 shows the mean and root mean square error (RMSE) of the gain-phase error coefficients obtained by the proposed algorithm, where only the first 8 gain-phase error coefficients of the original URA are given for simplification.
It can be seen from Figure 2 that the proposed algorithm can accurately estimate the 2D DOAs for the URA with gain-phase errors and the estimated 2D DOAs can be automatically paired. Therefore, it can achieve the localization of multiple sources. It can be seen from Table 1 that the proposed algorithm can also accurately estimate the gain-phase error coefficients, hence to further realize the self-calibration of the gain-phase errors of the URA.
5.2. 2D DOA Estimation Performance
Using the same settings with Section 5.1, the proposed algorithm is assessed and compared with the MUSIC-like algorithm in [20] under different SNRs and different snapshots. Given L = 256, Figure 3a shows the 2D DOA estimation RMSEs of the proposed algorithm and the MUSIC-like algorithm with the SNR changing from 0 dB to 40 dB in a step of 2 dB. Given SNR = 10 dB, Figure 3b gives the 2D DOA estimation RMSEs of the proposed algorithm and the MUSIC-like algorithm with the snapshot number changing from 10 to 5000 in a step of 100. Both Figure 3a,b are obtained by averaging over 500 Monte Carlo trials. The theoretical CRB curves with unknown and known gain-phase error coefficients are also shown in Figure 3a,b.
It can be seen that, with the increase of the SNR and the snapshot number, the DOA estimation performance of both algorithms is gradually improved. Although its RMSEs are slightly larger than those of the MUSIC-like algorithm, the proposed algorithm can complete the 2D DOA estimation without any iteration and spectral peak search, hence has a much lower computing complexity (the running time of the proposed algorithm and the MUSIC-like algorithm are 0.2721 s and 1.9375 s, respectively).
5.3. Gain-Phase Error Self-Calibration Performance
Define the self-calibration errors of the gain error and phase error coefficients as and , respectively, where , and , are the estimated and real error coefficients.
Given L = 256, Figure 4a,b show the self-calibration errors of the gain-phase error coefficients obtained by the proposed algorithm and the MUSIC-like algorithm with the SNR changing from 0 dB to 40 dB in a step of 2 dB. Given SNR = 10 dB, Figure 5a,b show the self-calibration errors of the gain-phase error coefficients obtained by the proposed algorithm and the MUSIC-like algorithm with the snapshot number changing from 10 to 5000 in a step of 100. The theoretical CRBs of the gain-phase error coefficient estimations are also shown in Figure 4 and Figure 5.
It can be seen from Figure 4 and Figure 5 that the self-calibration errors of the proposed algorithm are basically the same as that of the MUSIC-like algorithm in [20]. With the increase of the SNR and the snapshot number, the gain-phase self-calibration errors are progressively decreased, which means that the estimated gain-phase error matrix is close to the actual one, hence meeting the requirements of URA self-calibration.
With and without gain-phase self-calibration by the proposed algorithm, Figure 6 and Figure 7 show the spatial spectra and the corresponding contour maps obtained by 2D MUSIC algorithm. In the simulation, the snapshots L = 256 and the SNR = 10 dB. It can be seen that, when the gain-phase error is not calibrated, the 2D MUSIC spatial spectrum cannot form accurate spectral peaks at the 2D DOAs of the three sources, thus the three sources cannot be distinguished. After gain-phase error self-calibration via the proposed algorithm, the 2D MUSIC spatial spectrum can form obvious and sharp spectral peaks at the 2D DOAs of the three sources. Therefore, the proposed algorithm can well accomplish the task of gain-phase error self-correction for the URA.
5.4. Performance Assessment under Different Numbers of Auxiliary Array Elements
The purpose of the final simulation is to assess the 2D DOA estimation performance of the proposed algorithm under different numbers of auxiliary array elements, so as to guide the application of the proposed algorithm in practice. Figure 8 shows the 2D DOA estimation RMSEs with the SNR changing from 0 dB to 40 dB in a step of 2 dB in the condition of , , , , and for different source numbers.
It can be seen that, with the increase of the number of auxiliary array elements, the 2D DOA estimation performance of the proposed algorithm will be slightly improved regardless of the source number and angular position, while the improvement is negligible compared to the cost of the additional auxiliary array elements. Hence, for practical URAs with gain-phase errors, the proposed algorithm only needs and auxiliary array elements for 2D DOA estimation.
6. Conclusions
Considering the gain-phase error of a URA, a low-complexity 2D DOA estimation and self-calibration algorithm is proposed in this study. First of all, the URA is modeled as the Kronecker product of two uniform linear arrays (ULAs), and several well-calibrated auxiliary elements are added into the two ULAs, respectively. Then, the rotation invariances destroyed by the gain-phase error are reconstructed by solving two constrained optimization problems, so that the ESPRIT algorithm can be used for 2D DOA estimation. Therefore, by setting several well-calibrated auxiliary array elements in the URA, the proposed algorithm can realize unambiguous joint 2D DOA and gain-phase error estimation. Simulation results indicate that the proposed algorithm can achieve high performance of 2D DOA estimation and gain-phase error self-calibration. Compared with existing typical algorithms, the proposed algorithm does not need any gain-phase error information during the DOA estimation process and does not need any iteration or peak search operations. Moreover, as the proposed algorithm does not need well-calibrated sources and does not use the small perturbation assumption of the array error, it is more suitable for the actual applications.
Author Contributions
Conceptualization, Y.G. and W.F.; methodology, Y.G.; validation, Y.G., X.H. and W.F.; investigation, J.G.; data curation, Y.G. and J.G.; writing—original draft preparation, Y.G. and W.F.; writing—review and editing, Y.G. and X.H.; supervision, J.G.; funding acquisition, W.F. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by National Natural Science Foundation of China under grant number 62001507 and Young Talent fund of University Association for Science and Technology in Shaanxi, China under grant number 20210106.
Data Availability Statement
The data presented in this study are available from the corresponding author upon reasonable request.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
As , , , and are similar to each other, only the first equation is proved here as an example.
According to its definition, the matrix block form of the selective matrix Fx1 can be rewritten as
The matrix block form of the diagonal matrix is
where are diagonal matrices.
Multiplying the selective matrix Fx1 by , we can obtain
According to the gain-phase error matrix, can be divided as , where k = 1,2,…,Ny, and is a diagonal matrix. Meanwhile, can be written as . Hence, we can obtain
According to its definition, the matrix block form of can be expressed as
Multiplying by the selective matrix Fx1, we can obtain
where
Therefore, according to Equations (A3), (A4), (A6), and (A7), we have .
Appendix B
Appendix B.1. 2D DOA FI Submatrix
The partial derivative of with respect to can be calculated by
where , , and vm denotes the m-th column of the identity matrix IP.
Let and substitute Equation (A8) into Equation (31), and we can obtain
which can be written in the matrix form as
Equation (A10) is the FI submatrix about the DOA estimations corresponding to the x-axis. In the same way, the FI submatrix of the DOA estimations corresponding to the y-axis and the FI submatrix between them can be calculated by
where ,, and .
Appendix B.2. Gain-Phase Error FI Submatrix
Since the auxiliary array elements are well-calibrated, their corresponding diagonal elements in the gain-phase error matrix are all 1, regarded as the known parameters. Thus, the partial derivative of with respect to can be calculated by
where denotes the m-th phase error coefficient of .
Substituting Equation (A14) into Equation (31), the FI submatrix of the gain error coefficients can be obtained as
In the same way, the FI submatrices of other gain-phase error coefficients can be obtained as
where
In addition to the above-mentioned FI submatrices, FIM also contains some submatrices with the cross terms of DOA and gain-phase error coefficient, e.g., , , , , whose solving process is basically similar to the above-mentioned submatrices; it will not be presented here for simplification.
References
- Abeida, H.; Delmas, J.P. Robustness of subspace-based algorithms with respect to the distribution of the noise: Application to DOA estimation. Signal Process. 2019, 164, 313–319. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S.M.; Ahmed, A.; Zhang, Y.D.; Sun, S.Q. Enhanced DOA estimation exploiting multi-frequency sparse array. IEEE Trans. Signal Process. 2021, 69, 5935–5946. [Google Scholar] [CrossRef]
- Luo, J.; Zhang, Y.; Yang, J.; Zhang, D.; Zhang, Y.; Zhang, Y.; Huang, Y.; Jakobsson, A. Online sparse DOA estimation based on sub–aperture recursive LASSO for TDM–MIMO radar. Remote Sens. 2022, 14, 2133. [Google Scholar] [CrossRef]
- Fu, X.W.; Cao, R.Z.; Wen, F.Q. A de-noising 2D-DOA estimation method for uniform rectangle array. IEEE Commun. Lett. 2018, 22, 1854–1857. [Google Scholar] [CrossRef]
- Yu, J.; Li, J.; Sun, B.; Jiang, Y.; Xu, L. Multiple RFI sources location method combining two-dimensional ESPRIT DOA estimation and particle swarm optimization for spaceborne SAR. Remote Sens. 2021, 13, 1207. [Google Scholar] [CrossRef]
- Li, J.; Zhao, J.; Ding, Y.H.; Li, Y.F.; Chen, F.J. An improved co-prime parallel array with conjugate augmentation for 2-D DOA estimation. IEEE Sens. J. 2021, 21, 23400–23411. [Google Scholar] [CrossRef]
- Chen, P.; Chen, Z.M.; Cao, Z.X.; Wang, X.B. A new atomic norm for DOA estimation with gain-phase errors. IEEE Trans. Signal Process. 2020, 68, 4293–4306. [Google Scholar] [CrossRef]
- Wan, B.; Wu, X.; Yue, X.; Zhang, L.; Wang, L. Calibration of phased-array high-frequency radar on an anchored floating platform. Remote Sens. 2022, 14, 2174. [Google Scholar] [CrossRef]
- See, C.M.S. Method for array calibration in high-resolution sensor array processing. IEE Radar Sonar Navig. 1995, 142, 90–96. [Google Scholar] [CrossRef]
- Astely, D.; Swindlehurst, A.L.; Ottersten, B. Spatial signature estimation for uniform linear arrays with unknown receiver gains and phases. IEEE Trans. Signal Process. 1999, 47, 2128–2138. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Yang, H.J.; Jung, B.W.; Chun, J. Blind calibration for a linear array with gain and phase error using independent component analysis. IEEE Antennas Wirel. Propag. Lett. 2010, 9, 1259–1262. [Google Scholar] [CrossRef]
- Liao, B.; Chan, S.C. Direction-of-arrival estimation in subarrays-based linear sparse arrays with gain/phase uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2268–2280. [Google Scholar] [CrossRef]
- Xie, W.; Wang, C.S.; Wen, F.; Liu, J.B.; Wan, Q. DOA and gain-phase errors estimation for noncircular sources with central symmetric array. IEEE Sens. J. 2017, 17, 3068–3078. [Google Scholar] [CrossRef]
- Tian, Y.; Wang, Y.R.; Rong, X.R.; Lian, Q.S. Mixed source localization and gain-phase perturbation calibration in partly calibrated symmetric uniform linear arrays. Signal Process. 2020, 166, 1–7. [Google Scholar] [CrossRef]
- Hu, B.; Wu, X.C.; Zhang, X.; Yang, Q.; Deng, W.B. DOA estimation based on compressed sensing with gain/phase uncertainties. IET Radar Sonar Navig. 2018, 12, 1346–1352. [Google Scholar] [CrossRef]
- Fang, Y.F.; Zhu, S.Q.; Gao, Y.C. Direction finding by covariance matrix sparse representation with sensor gain and phase uncertainties in unknown non-uniform noise. IEEE Wirel. Commun. Lett. 2021, 10, 175–179. [Google Scholar] [CrossRef]
- Liu, A.F.; Liao, G.S.; Zeng, C.; Yang, Z.W.; Xu, Q. An eigenstructure method for estimating DOA and sensor gain-phase errors. IEEE Trans. Signal Process. 2011, 59, 5944–5956. [Google Scholar] [CrossRef]
- Philipp, H.; Abdelhak, M.Z.; Michael, R. Joint 2-D DOA estimation and phase calibration for uniform rectangular arrays. IEEE Trans. Signal Process. 2012, 60, 4683–4693. [Google Scholar]
- Yuan, L.T.; Jiang, R.X.; Chen, Y.W. Gain and phase autocalibration of large uniform rectangular arrays for underwater 3-D sonar imaging systems. IEEE J. Ocean. Eng. 2014, 39, 458–471. [Google Scholar] [CrossRef]
- Cui, H.; Peng, W.J.; Liu, T. MUSIC-like joint estimation of 2-D DOAs and sensor gain/phase responses for rectangular array. In Proceedings of the 2017 11th Asian Control Conference (ASCC), Gold Coast, QLD, Australia, 17–20 December 2017. [Google Scholar]
- Dai, Z.; Su, W.M.; Gu, H. A gain and phase autocalibration approach for large-scale planar antenna arrays. IEEE Commun. Lett. 2021, 25, 1645–1649. [Google Scholar] [CrossRef]
- Wang, B.H.; Wang, Y.L.; Chen, H.; Guo, Y. Array calibration of angularly dependent gain and phase uncertainties with carry-on instrumental sensors. Sci. China Ser. F Inf. Sci. 2004, 47, 777–792. [Google Scholar] [CrossRef]
- Mao, Z.; Liu, S.; Qin, S.; Haung, Y. Cramér-Rao Bound of joint DOA-range estimation for coprime frequency diverse arrays. Remote Sens. 2022, 14, 583. [Google Scholar] [CrossRef]
Figure 1.
Geometry of the original and extended URAs for 2D DOA estimation.
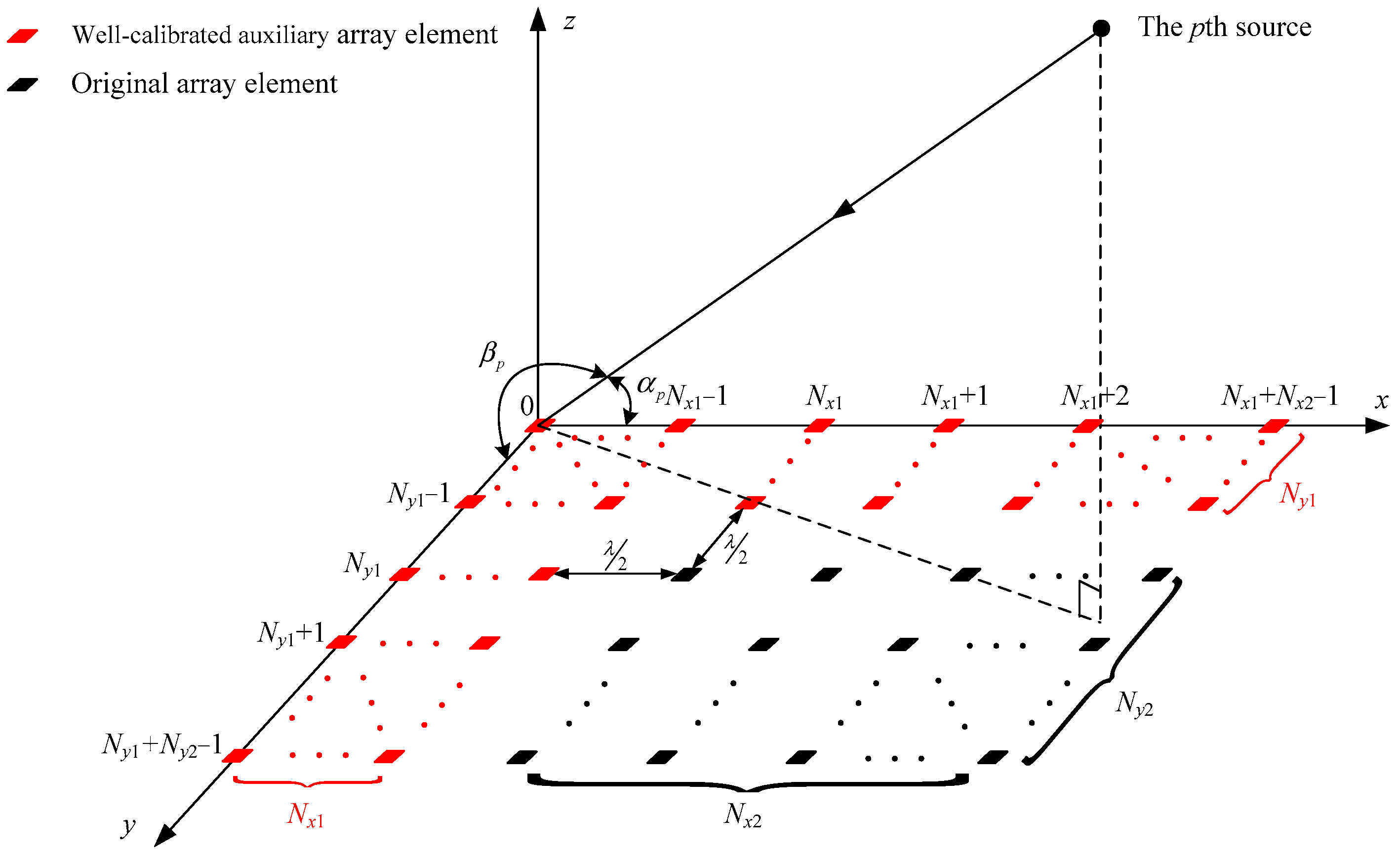
Figure 2.
The estimated 2D DOAs.
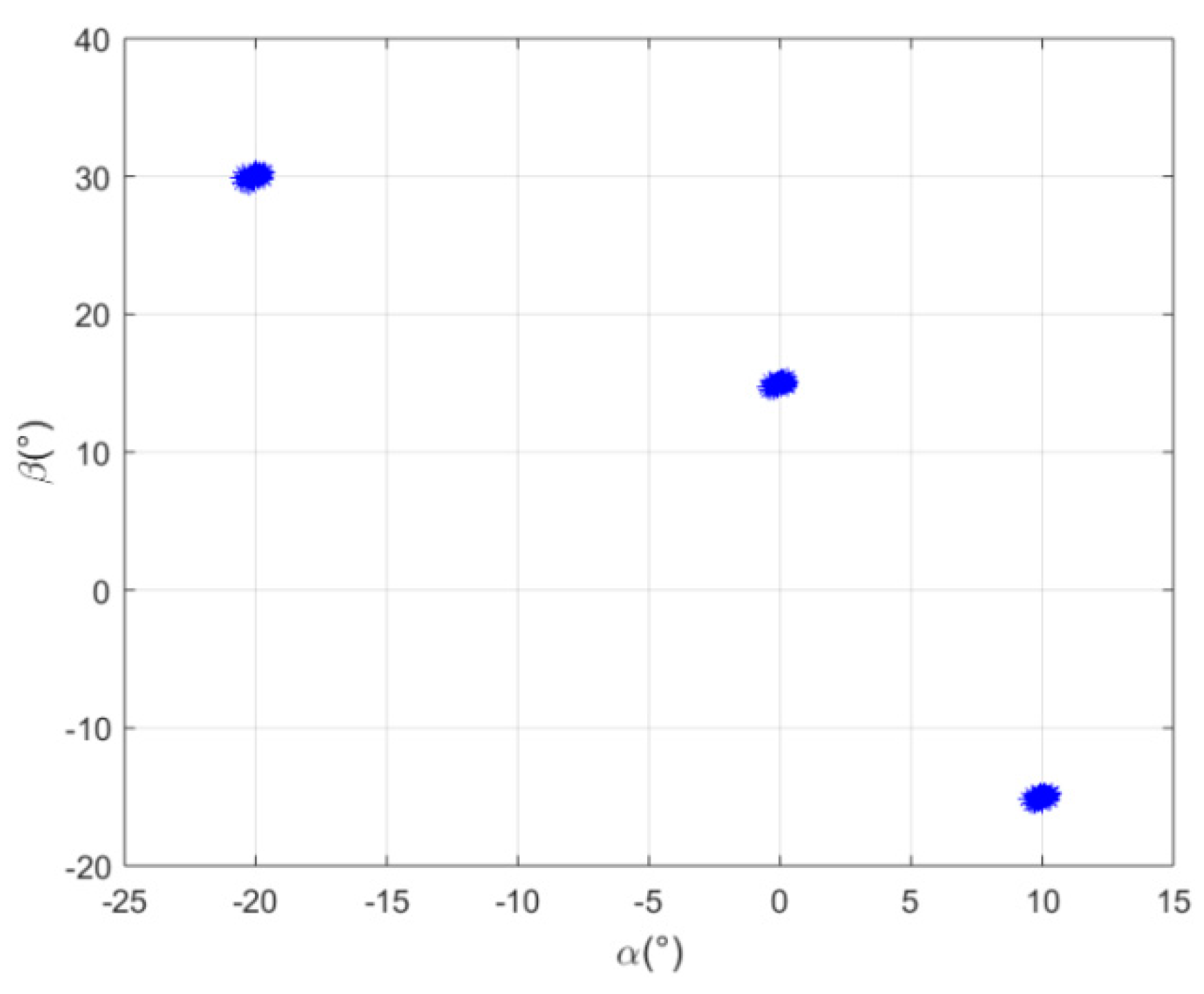
Figure 3.
The RMSEs of 2D DOA estimation. (a) RMSE versus SNR; (b) RMSE versus snapshots.
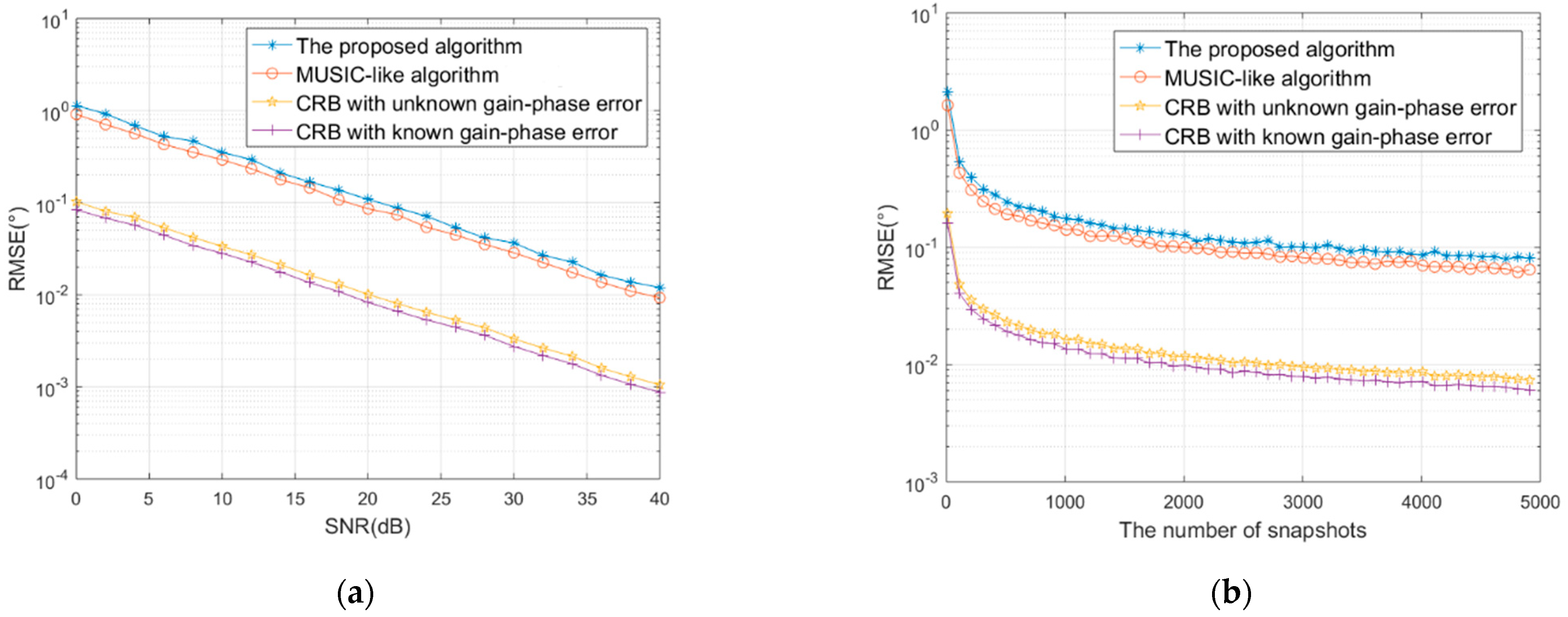
Figure 4.
The self-calibration errors versus SNR. (a) versus SNR; (b) versus SNR.

Figure 5.
The self-calibration errors versus snapshot number. (a) versus snapshot number; (b) versus snapshot number.
Figure 5.
The self-calibration errors versus snapshot number. (a) versus snapshot number; (b) versus snapshot number.

Figure 6.
2D MUSIC estimation results without self-calibration. (a) Spatial spectrum; (b) Contour map.
Figure 6.
2D MUSIC estimation results without self-calibration. (a) Spatial spectrum; (b) Contour map.
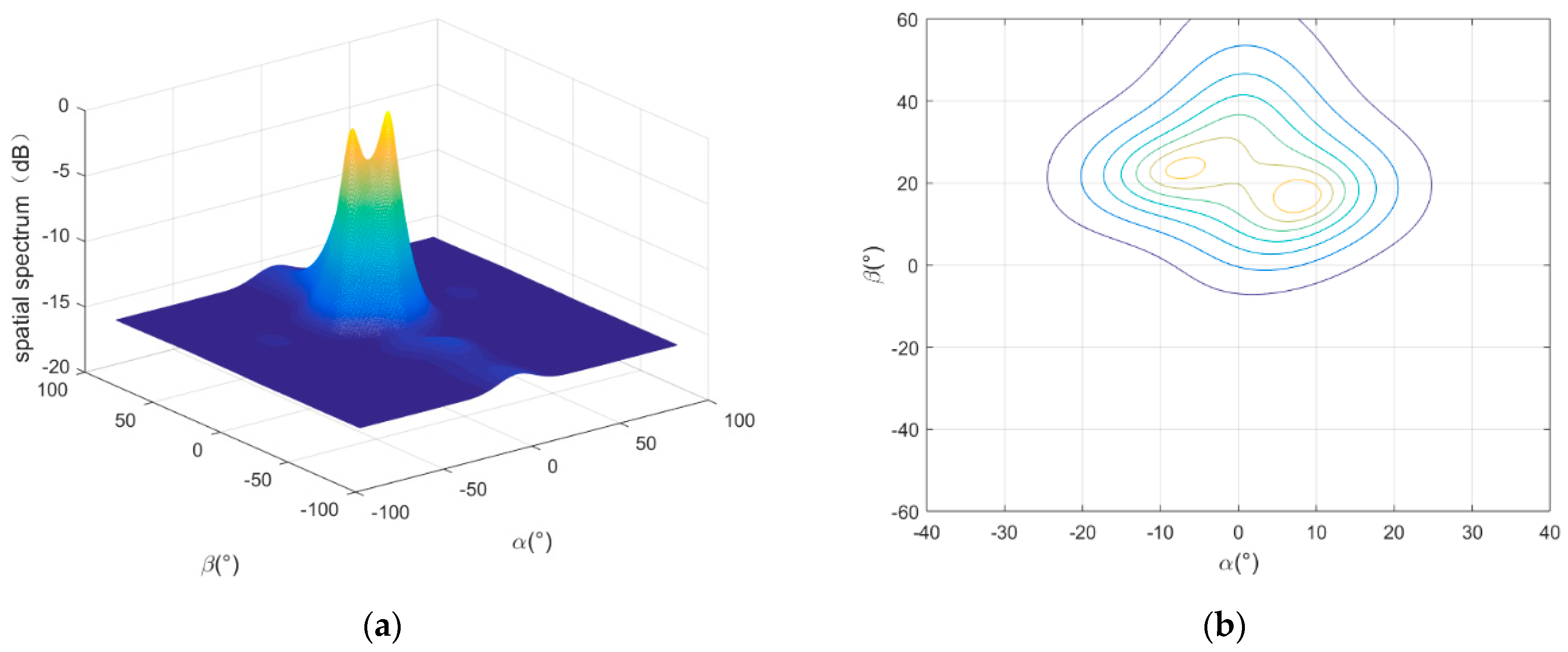
Figure 7.
2D MUSIC estimation results with self-calibration. (a) Spatial spectrum; (b) Contour map.
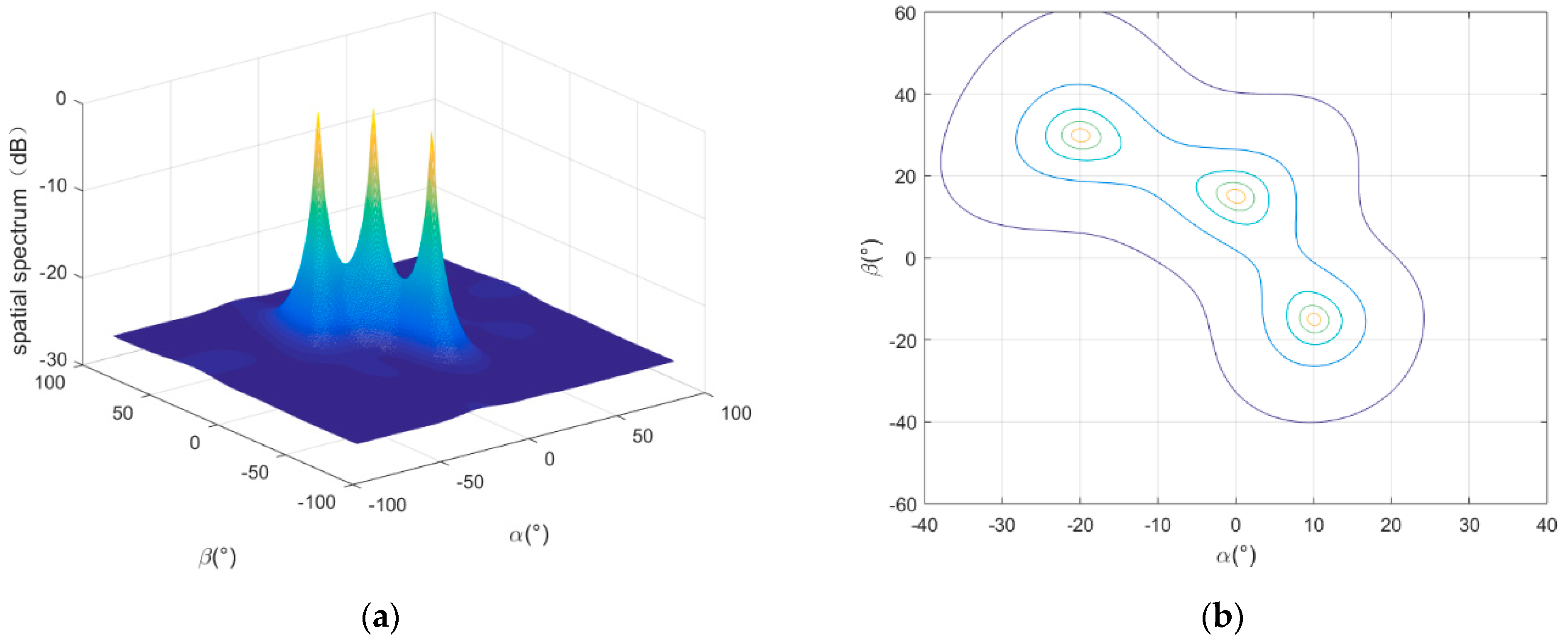
Figure 8.
DOA estimation RMSE with different auxiliary array elements for different source numbers. (a) 1 source located on ; (b) 3 sources located on , , and .
Figure 8.
DOA estimation RMSE with different auxiliary array elements for different source numbers. (a) 1 source located on ; (b) 3 sources located on , , and .


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Mean and RMSE of the gain-phase error coefficients.
| True Value | Estimated Gain Error Coefficients | RMSE of Gain Error Coefficients | Estimated Phase Error Coefficients (Rad) | RMSE of Phase Error Coefficients (Rad) |
|---|---|---|---|---|
| 1.2284 | 0.0229 | 0.1211 | 0.0130 | |
| 1.1344 | 0.0421 | 1.3530 | 0.0266 | |
| 0.9327 | 0.0524 | 0.9836 | 0.0403 | |
| 1.3825 | 0.0583 | 2.6551 | 0.0531 | |
| 0.9556 | 0.0925 | 1.9775 | 0.0681 | |
| 0.9594 | 0.0235 | 1.1221 | 0.0130 | |
| 1.2516 | 0.0615 | 2.3533 | 0.0245 | |
| 1.5154 | 0.0813 | 0.5848 | 0.0363 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Guo, Y.; Hu, X.; Feng, W.; Gong, J. Low-Complexity 2D DOA Estimation and Self-Calibration for Uniform Rectangle Array with Gain-Phase Error. Remote Sens. 2022, 14, 3064. https://doi.org/10.3390/rs14133064
AMA Style
Guo Y, Hu X, Feng W, Gong J. Low-Complexity 2D DOA Estimation and Self-Calibration for Uniform Rectangle Array with Gain-Phase Error. Remote Sensing. 2022; 14(13):3064. https://doi.org/10.3390/rs14133064
Chicago/Turabian StyleGuo, Yiduo, Xiaowei Hu, Weike Feng, and Jian Gong. 2022. "Low-Complexity 2D DOA Estimation and Self-Calibration for Uniform Rectangle Array with Gain-Phase Error" Remote Sensing 14, no. 13: 3064. https://doi.org/10.3390/rs14133064
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.