
Multi-Temporal Satellite Image Composites in Google Earth Engine for Improved Landslide Visibility: A Case Study of a Glacial Landscape

 ,
,  ,
,
Abstract
:
1. Introduction
- To what extent can spatial bias in the NLDB be improved using EO images and change detection approaches to detect landslides?
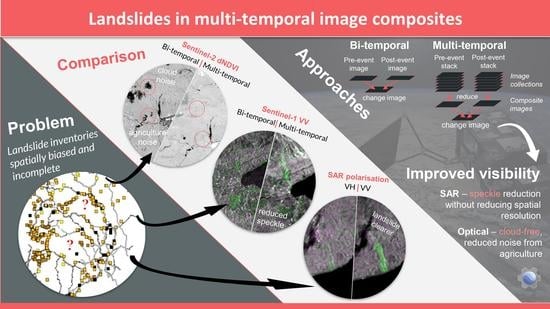
- How can multi-temporal, image-composite change detection approaches using GEE improve landslide visibility, compared with bi-temporal change detection approaches?
- In which data types (S2-NDVI, S1-VV, S1-VH) are the landslides most visible?
2. Case Study: Jølster Rainstorm Event on 30 July 2019, Western Norway
3. Data Used
4. Methods
- Technique: bi-temporal or multi-temporal (Figure 2);
- Input data: Sentinel-1 SAR backscatter intensity values using either cross (VH) or co-polarised (VV) data, or Sentinel-2 optical data using NDVI values.
- There was a relatively high frequency of image acquisition at a northern latitude location;
- The optical images were not all cloud-covered in this period;
- With the coming of fall, the conditions changed significantly between August and September in the study area, including more shadows on north-facing slopes and a reduction in green vegetation at high altitudes.
4.1. Methods for Producing the Change Detection Images
4.1.1. Sentinel-2 bi-Temporal (S2-BT) Image
4.1.2. Sentinel-2 Multi-temporal (S2-MT) Image
4.1.3. Sentinel-1 bi-Temporal (S1-BT)
4.1.4. Sentinel-1 Multi-temporal (S1-MT)
4.2. Analyses of the Different Approaches
4.2.1. Preliminary Landslide Mapping S2-BT and Spatial Bias Analysis
4.2.2. Preliminary Field Mapping and Verification
4.2.3. Comparison between the Four Manual Mapping Approaches
4.2.4. Landslide Visibility in VV and VH Polarisations and Effect of Local Incidence Angle
5. Results
5.1. Analysis of Spatial Bias with Preliminary Landslide Mapping Using Sentinel-2 dNDVI
5.2. Comparison of Landslide Visibility between the Approaches
5.3. Landslide Visibility in VV and VH Polarisations
- The Vassenden landslide appears clearly in VV polarisation from top to tail; however, it is barely visible in the VH polarisation. In VH polarisation, the landslide is not easily distinguishable from surrounding vegetated areas, especially grass. The upper section is slightly visible in the VH image; however, this would not be picked out without prior knowledge.
- Apart from an area with image distortion due to terrain correction at the initiation zone of the landslides, the large Slåtten landslides are mostly visible in the S1-MT VV image. However, the boundaries between the separate landslides are less clear than those in the S2 images. The smaller landslides to the west of the large ones are barely visible. Again, in the VH image, the deposit areas of the landslides are barely distinguishable from the surrounding grass. However, some of the eroded channels are slightly visible within the landslide area in the western and centre of the large landslides.
- At Årnes, the landslide appears clearly in the VV polarisation aside from the distortion in the initiation zone, while in the VH polarisation, again only some of the channelised areas are visible.
- At Tindefjellet, the small landslides are visible in both VV and VH polarisations, although appear brighter in VV.

6. Discussion
6.1. Improving Landslide Visibility with Multi-temporal Composites and Decreasing Spatial Bias
6.2. How the Approaches Differ to Similar Methods
6.3. Polarimetric Scattering Properties of Vegetation and Landslides
6.4. Recommendations and Future Research Directions
7. Conclusions
- The landslide event inventory for Jølster produced in this study consists of 120 landslides mapped from the Sentinel-2 bi-temporal change detection image with a 10 m resolution. This represents a significant improvement in inventory completeness, with the initial 14 landslides reported in the NLDB for this event.
- Spatial bias towards roads was also significantly reduced, with the percentage of landslides located within 500 m of a road reduced from 100% in the NLDB from ground-based landslide reporting to ca. 30% in the remotely mapped landslide inventory.
- Landslide visibility was improved for both Sentinel-1 and Sentinel-2, using multi-temporal image composites instead of bi-temporal composites. For Sentinel-1, this was due to noise reduction from speckle and the removal of clouds for Sentinel-2.
- Landslides appeared most clearly in the S2 dNDVI images. For this case study, as a relatively cloud-free image was available very soon after the event, there was not a great advantage improvement in landslide visibility observed in using the MT approach, compared with the BT approach for Sentinel-2 data.
- On the other hand, significant improvements in the clarity of the Sentinel-1 image were achieved by applying this method, with the number of detectable landslides increasing from 9 in the S1-BT image to 52 in the S1-MT image. The MT image composites were also significantly faster to produce than the BT images, without the need for downloading large quantities of data. In the S1-MT and S1-BT images, respectively, 52 and 9 out of the 120 mapped landslides were considered detectable. We note that, although the rates of landslide detection using S1-MT images were lower than that in other studies using BT methods (e.g., 83% in [46]), the average size of the landslides in our set was significantly smaller than those investigated in the aforementioned study, and several of these were visible in the S1-MT image but not the S1-BT image.
- Contrary to other studies, landslides in our investigation area appeared much more clearly using VV polarisation, compared with VH polarisation. We presented a conceptual model to help explain these results.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Field, C.B.; Barros, V.; Stocker, T.F.; Dahe, Q. Managing the Risks of Extreme Events and Disasters to Advance Climate Change Adaptation: Special Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Myhre, G.; Alterskjær, K.; Stjern, C.W.; Hodnebrog, Ø.; Marelle, L.; Samset, B.H.; Sillmann, J.; Schaller, N.; Fischer, E.; Schulz, M.; et al. Frequency of extreme precipitation increases extensively with event rareness under global warming. Sci. Rep. 2019, 9, 1–10. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hanssen-Bauer, I.; Drange, H.; Førland, E.J.; Roald, L.A.; Børsheim, K.Y.; Hisdal, H.; Lawrence, D.; Nesje, A.; Sandven, S.; Sorteberg, A.; et al. Climate in Norway 2100: Background information to NOU Climate Adaptation. In Klima i Norge 2100: Bakgrunnsmateriale til NOU Klimatilplassing; Norsk Klimasenter: Stavanger, Norway, 2009. [Google Scholar]
- UNISDR (United Nations International Strategy for Disaster Reduction). Terminology on Disaster Risk Reduction; Geneva, Switzerland, 2009. Available online: http://www.unisdr.org (accessed on 1 May 2022).
- Krøgli, I.K.; Devoli, G.; Colleuille, H.; Boje, S.; Sund, M.; Engen, I.K. The Norwegian forecasting and warning service for rainfall- and snowmelt-induced landslides. Nat. Hazards Earth Syst. Sci. 2018, 18, 1427–1450. [Google Scholar] [CrossRef] [Green Version]
- Guzzetti, F.; Mondini, A.C.; Cardinali, M.; Fiorucci, F.; Santangelo, M.; Chang, K.-T. Landslide inventory maps: New tools for an old problem. Earth Sci. Rev. 2012, 112, 42–66. [Google Scholar] [CrossRef] [Green Version]
- Devoli, G.; Colleuille, H.; Sund, M.; Wasrud, J. Seven Years of Landslide Forecasting in Norway—Strengths and Limitations. In Understanding and Reducing Landslide Disaster Risk: Monitoring and Early Warning; Casagli, N., Tofani, V., Sassa, K., Bobrowsky, P.T., Takara, K., Eds.; Springer International Publishing: Cham, Germany, 2021; Volume 3, pp. 257–264. ISBN 978-3-030-60311-3. [Google Scholar]
- Devoli, G.; (NVE, Oslo, Norway). Personal Communication, 2022.
- Taylor, F.E.; Malamud, B.D.; Freeborough, K.; Demeritt, D. Enriching Great Britain’s National Landslide Database by searching newspaper archives. Geomorphology 2015, 249, 52–68. [Google Scholar] [CrossRef] [Green Version]
- Kirschbaum, D.B.; Adler, R.; Hong, Y.; Hill, S.; Lerner-Lam, A. A global landslide catalog for hazard applications: Method, results, and limitations. Nat. Hazards 2010, 52, 561–575. [Google Scholar] [CrossRef] [Green Version]
- Damm, B.; Klose, M. The landslide database for Germany: Closing the gap at national level. Geomorphology 2015, 249, 82–93. [Google Scholar] [CrossRef]
- Foster, C.; Pennington, C.V.L.; Culshaw, M.G.; Lawrie, K. The national landslide database of Great Britain: Development, evolution and applications. Environ. Earth Sci. 2012, 66, 941–953. [Google Scholar] [CrossRef] [Green Version]
- Zhao, C.; Lu, Z. Remote Sensing of Landslides—A Review. Remote Sens. 2018, 10, 279. [Google Scholar] [CrossRef] [Green Version]
- Massey, C.I.; Townsend, D.T.; Lukovic, B.; Morgenstern, R.; Jones, K.; Rosser, B.; de Vilder, S. Landslides triggered by the MW7.8 14 November 2016 Kaikōura earthquake: An update. Landslides 2020, 17, 2401–2408. [Google Scholar] [CrossRef]
- Bessette-Kirton, E.K.; Cerovski-Darriau, C.; Schulz, W.H.; Coe, J.A.; Kean, J.W.; Godt, J.W.; Thomas, M.A.; Hughes, K.S. Landslides triggered by Hurricane Maria: Assessment of an extreme event in Puerto Rico. Geol. Soc. Am. Today 2019, 29, 4–10. [Google Scholar]
- Meena, S.R.; Tavakkoli Piralilou, S. Comparison of earthquake-triggered landslide inventories: A case study of the 2015 Gorkha earthquake, Nepal. Geosciences 2019, 9, 437. [Google Scholar] [CrossRef] [Green Version]
- Devoli, G.; Jarsve, K.T.; Mongstad, H.H.J.; Sandboe, K.S.; Are, O. Control of Registered Mass-Movement Events and Determination of Quality Level; Report 31/2022; NVE: Oslo, Norway, 2020; 73p, Available online: https://publikasjoner.nve.no/rapport/2020/rapport2020_31.pdf (accessed on 1 May 2022).
- Herrera, G.; Mateos, R.M.; Garcia-Davalillo, J.C.; Grandjean, G.; Poyiadji, E.; Maftei, R.; Filipciuc, T.-C.; Auflič, M.J.; Jež, J.; Podolszki, L.; et al. Landslide databases in the Geological Surveys of Europe. Landslides 2018, 15, 359–379. [Google Scholar] [CrossRef]
- Steger, S.; Brenning, A.; Bell, R.; Glade, T. The influence of systematically incomplete shallow landslide inventories on statistical susceptibility models and suggestions for improvements. Landslides 2017, 14, 1767–1781. [Google Scholar] [CrossRef] [Green Version]
- Van Den Eeckhaut, M.; Hervás, J. State of the art of national landslide databases in Europe and their potential for assessing landslide susceptibility, hazard and risk. Geomorphology 2012, 139–140, 545–558. [Google Scholar] [CrossRef]
- Strickland, E. Big data comes to the forest. IEEE Spectr. 2014, 51, 11–12. [Google Scholar] [CrossRef] [Green Version]
- Arévalo, P.; Bullock, E.L.; Woodcock, C.E.; Olofsson, P. A Suite of Tools for Continuous Land Change Monitoring in Google Earth Engine. Front. Clim. 2020, 2, 26. [Google Scholar] [CrossRef]
- Prakash, N.; Manconi, A.; Loew, S. A new strategy to map landslides with a generalized convolutional neural network. Sci. Rep. 2021, 11, 1–15. [Google Scholar] [CrossRef]
- Tehrani, F.S.; Santinelli, G.; Herrera, M.H. Multi-Regional landslide detection using combined unsupervised and supervised machine learning. Geomat. Nat. Hazards Risk 2021, 12, 1015–1038. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Blaschke, T.; Gholamnia, K.; Meena, S.R.; Tiede, D.; Aryal, J. Evaluation of Different Machine Learning Methods and Deep-Learning Convolutional Neural Networks for Landslide Detection. Remote Sens. 2019, 11, 196. [Google Scholar] [CrossRef] [Green Version]
- Đurić, D.; Mladenović, A.; Pešić-Georgiadis, M.; Marjanović, M.; Abolmasov, B. Using multiresolution and multi-temporal satellite data for post-disaster landslide inventory in the Republic of Serbia. Landslides 2017, 14, 1467–1482. [Google Scholar] [CrossRef]
- Lindsay, E.; Frauenfelder, R.; Nava, L.; Furuseth, J.I.; Nordal, S. Applying ML-models for landslide detection on a northern, glacially-formed landscape: Jølster case study. Remote Sens. 2022. in preparation. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Scheip, C.M.; Wegmann, K.W. HazMapper: A global open-source natural hazard mapping application in Google Earth Engine. Nat. Hazards Earth Syst. Sci. 2021, 21, 1495–1511. [Google Scholar] [CrossRef]
- Mondini, A.C.; Guzzetti, F.; Chang, K.-T.; Monserrat, O.; Martha, T.R.; Manconi, A. Landslide failures detection and mapping using Synthetic Aperture Radar: Past, present and future. Earth Sci. Rev. 2021, 216, 103574. [Google Scholar] [CrossRef]
- Handwerger, A.L.; Huang, M.-H.; Jones, S.Y.; Amatya, P.; Kerner, H.R.; Kirschbaum, D.B. Generating landslide density heatmaps for rapid detection using open-access satellite radar data in Google Earth Engine. Nat. Hazards Earth Syst. Sci. 2022, 22, 753–773. [Google Scholar] [CrossRef]
- Google Sentinel-1 Algorithms-Earth Engine-Google Developers. Available online: https://developers.google.com/earth-engine/guides/sentinel1 (accessed on 1 May 2022).
- Ochtyra, A.; Marcinkowska-Ochtyra, A.; Raczko, E. Threshold- and trend-based vegetation change monitoring algorithm based on the inter-annual multi-temporal normalized difference moisture index series: A case study of the Tatra Mountains. Remote Sens. Environ. 2020, 249, 112026. [Google Scholar] [CrossRef]
- Mondini, A.C.; Guzzetti, F.; Reichenbach, P.; Rossi, M.; Cardinali, M.; Ardizzone, F. Semi-automatic recognition and mapping of rainfall induced shallow landslides using optical satellite images. Remote Sens. Environ. 2011, 115, 1743–1757. [Google Scholar] [CrossRef]
- Di Martino, G.; di Simone, A.; Iodice, A.; Riccio, D.; Ruello, G. Assessing Performance of Multi-temporal SAR Image Despeckling Filters via a Benchmarking Tool. In Proceedings of the IGARSS 2020-2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 1536–1539. [Google Scholar]
- Ruther, D.; Hefre, H.; Rubensdotter, L. Extreme precipitation-induced landslide event on June 30, 2019 in Jølster, western Norway. Nor. J. Geol. 2022, submitted.
- Meteorologisk Institutt. Intense Byger Med Store Konsekvenser i Sogn og Fjordane 30. Juli 2019; Meteorologisk Institutt: Bergen, Norway, 2019.
- Løset, O. For Ett År Siden Gikk Det 30 Skred i Jølster, Førde Og Gloppen. Slik Ser Det Ut Nå. Available online: https://www.bt.no/nyheter/lokalt/i/K3OLk5/slik-ser-det-ut-ett-aar-etter-jordskredene (accessed on 1 May 2022).
- Olsen, L.; Sveian, H.; Bergstrøm, B.; Ottesen, D.; Rise, L. Quaternary Glaciations and Their Variations in Norway and on the Norwegian Continental Shelf. In Quaternary Geology of Norway; Olsen, L., Fredin, O., Olesen, O., Eds.; Norges Geologiske Undersøkelse: Trondheim, Norway, 2013; pp. 27–78. ISBN 0801-5961. [Google Scholar]
- Hughes, A.L.C.; Gyllencreutz, R.; Lohne, Ø.S.; Mangerud, J.; Svendsen, J.I. The last Eurasian ice sheets--a chronological database and time-slice reconstruction, DATED-1. Boreas 2016, 45, 1–45. [Google Scholar] [CrossRef]
- Norges Geologiske Undersøkelse. Bedrock. Available online: https://geo.ngu.no/kart/berggrunn_mobil/ (accessed on 1 May 2022).
- Norges Geologiske Undersøkelse. Løsmasser-Nasjonal Løsmassedatabase. Available online: http://geo.ngu.no/kart/losmasse_mobil/ (accessed on 1 May 2022).
- Wiesmann, A.; Wegmuller, U.; Honikel, M.; Strozzi, T.; Werner, C.L. Potential and Methodology of Satellite Based SAR for Hazard Mapping. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future, IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, NSW, Australia, 9–13 July 2001; Volume 7, pp. 3262–3264. [Google Scholar]
- Eckerstorfer, M.; Malnes, E. Manual detection of snow avalanche debris using high-resolution Radarsat-2 SAR images. Cold Reg. Sci. Technol. 2015, 120, 205–218. [Google Scholar] [CrossRef]
- Vollrath, A.; Mullissa, A.; Reiche, J. Angular-Based Radiometric Slope Correction for Sentinel-1 on Google Earth Engine. Remote Sens. 2020, 12, 1867. [Google Scholar] [CrossRef]
- Mondini, A.; Santangelo, M.; Rocchetti, M.; Rossetto, E.; Manconi, A.; Monserrat, O. Sentinel-1 SAR Amplitude Imagery for Rapid Landslide Detection. Remote Sens. 2019, 11, 760. [Google Scholar] [CrossRef] [Green Version]
- Kellndorfer, J.; Flores-Anderson, A.I.; Herndon, K.E.; Thapa, R.B. Using SAR Data for Mapping Deforestation and Forest Degradation. In SAR Handbook: Comprehensive Methodologies for Forest Monitoring and Biomass Estimation; National Space Science and Technology Center: Hunstville, AL, USA, 2019; pp. 65–79. [Google Scholar]
- Mouginis-Mark, P. Effects of Surface Cover. Available online: http://satftp.soest.hawaii.edu/space/hawaii/vfts/kilauea/radar_ex/page4.html (accessed on 1 May 2022).
- Shibayama, T.; Yamaguchi, Y.; Yamada, H. Polarimetric Scattering Properties of Landslides in Forested Areas and the Dependence on the Local Incidence Angle. Remote Sens. 2015, 7, 15424–15442. [Google Scholar] [CrossRef] [Green Version]
- Claverie, M.; Ju, J.; Masek, J.G.; Dungan, J.L.; Vermote, E.F.; Roger, J.-C.; Skakun, S.V.; Justice, C. The Harmonized Landsat and Sentinel-2 surface reflectance data set. Remote Sens. Environ. 2018, 219, 145–161. [Google Scholar] [CrossRef]
- National Aeronautics and Space Administration. Quick Facts. Available online: https://nisar.jpl.nasa.gov/mission/quick-facts/ (accessed on 1 May 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data | ID/Description/Source Link | Source |
|---|---|---|
| DTM, 10 m | 6800_1 to 6800_4, accessed 10 August 2019, raster: https://hoydedata.no/LaserInnsyn/ | Høydedata |
| Registered landslides | ‘Skredhendelser’, accessed 18 November 2019, point data with attributes: https://nedlasting.nve.no/gis/ | NVE, RegObs |
| Roads | ‘Vbase’, accessed 10 August 2019, polyline data: https://kartkatalog.geonorge.no/ | NMA |
| Image | Value | Pre-Image Dates | Post-Image Dates |
|---|---|---|---|
| S2-BT | NDVI | 28.07.2019 | 02.02.2019 |
| S2-MT | Max NDVI | 01.07.2019–29.07.2019 (n = 12) | 31.07.2019–30.08.2019 (n = 12) |
| S1-BT | VV & VH | 25.07.2019 | 31.07.2019 |
| S1-MT | Mean VV & mean VH | 01.07.2019–29.07.2019 (n = 25) | 31.07.2019–30.08.2019 (n = 27) |
| Set: | 1—Undetectable | 2—Detectable with Prior Knowledge | 3—Detectable without Prior Knowledge |
|---|---|---|---|
| S1-BT | 111 | 5 | 4 |
| S1-MT | 68 | 41 | 11 |
| Landslide | Tindefjellet | Vassenden | ||||||
|---|---|---|---|---|---|---|---|---|
| Polarisation | VH | VV | VH | VV | ||||
| Surface Type | Veg. | Landslide | Veg. | Landslide | Veg. | Landslide | Veg. | Landslide |
| Mean | −20.7 | −14.0 | −11.0 | −5.0 | −14.3 | −12.9 | −7.0 | −5.0 |
| std. dev | 2.2 | 1.6 | 3.4 | 2.4 | 2.3 | 2.8 | 1.3 | 3.5 |
| Diff. Mean | 6.7 | 6.0 | 1.4 | 2.1 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lindsay, E.; Frauenfelder, R.; Rüther, D.; Nava, L.; Rubensdotter, L.; Strout, J.; Nordal, S. Multi-Temporal Satellite Image Composites in Google Earth Engine for Improved Landslide Visibility: A Case Study of a Glacial Landscape. Remote Sens. 2022, 14, 2301. https://doi.org/10.3390/rs14102301
Lindsay E, Frauenfelder R, Rüther D, Nava L, Rubensdotter L, Strout J, Nordal S. Multi-Temporal Satellite Image Composites in Google Earth Engine for Improved Landslide Visibility: A Case Study of a Glacial Landscape. Remote Sensing. 2022; 14(10):2301. https://doi.org/10.3390/rs14102301
Chicago/Turabian StyleLindsay, Erin, Regula Frauenfelder, Denise Rüther, Lorenzo Nava, Lena Rubensdotter, James Strout, and Steinar Nordal. 2022. "Multi-Temporal Satellite Image Composites in Google Earth Engine for Improved Landslide Visibility: A Case Study of a Glacial Landscape" Remote Sensing 14, no. 10: 2301. https://doi.org/10.3390/rs14102301