Mapping and Monitoring of Biomass and Grazing in Pasture with an Unmanned Aerial System

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Site and Field Sampling
2.2. UAS Imagery Acquisition and Processing
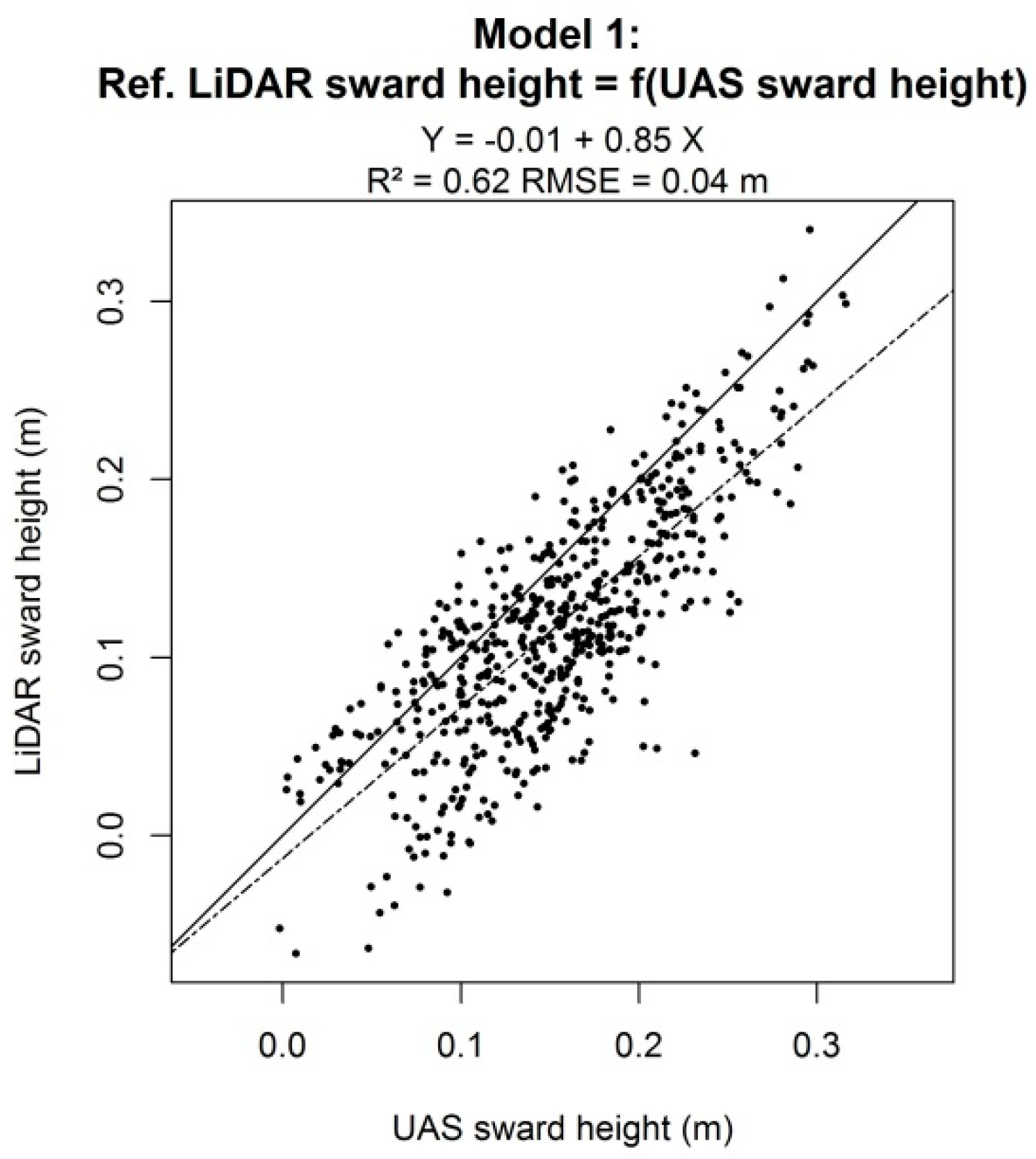
2.3. Validation of UAS Sward Height
2.4. Modeling Biomass of Pasture with UAS Imagery
2.5. Mapping Sward Height Differences and Biomass with UAS
3. Results
3.1. Validation of UAS Sward Height
3.2. Modeling Biomass of Pasture with UAS Imagery
3.3. Mapping Sward Height Differences and Biomass with UAS
4. Discussion
4.1. Modeling Biomass of Pasture with UAS Imagery
4.2. Mapping Sward Height Differences and Biomass with UAS
4.3. Operational Recommendation
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | R Squared | RMSE | MAE |
|---|---|---|---|
| Model 1 | 0.62 | 0.04 | 0.03 |
| Model 2 | 0.33 | 0.11 | 0.09 |
| Model 3 | 0.40 | 0.10 | 0.08 |
| Model 4 | 0.52 | 0.09 | 0.08 |
References
- O’Mara, F.P. The role of grasslands in food security and climate change. Ann. Bot. 2012, 110, 1263–1270. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Eurostat Farm Structure Statistics—Statistics Explained. Available online: http://ec.europa.eu/eurostat/statistics-explained/index.php/Farm_structure_statistics (accessed on 1 December 2017).
- Dillon, P.; Roche, J.; Shalloo, L.; Horan, B. Optimising financial return from grazing in temperate pastures. In Proceedings of the Satellite Workshop of the XXth International Grassland Congress, Cork, Ireland, July 2005; pp. 131–147. [Google Scholar] [CrossRef]
- Burow, E.; Rousing, T.; Thomsen, P.; Otten, N.D.; Sørensen, J. Effect of grazing on the cow welfare of dairy herds evaluated by a multidimensional welfare index. Animal 2013, 7, 834–842. [Google Scholar] [CrossRef] [PubMed]
- Boval, M.; Dixon, R. The importance of grasslands for animal production and other functions: A review on management and methodological progress in the tropics. Animal 2012, 6, 748–762. [Google Scholar] [CrossRef] [PubMed]
- Dumortier, P.; Aubinet, M.; Beckers, Y.; Chopin, H.; Debacq, A.; de la Motte, L.G.; Jérôme, E.; Wilmus, F.; Heinesch, B. Methane balance of an intensively grazed pasture and estimation of the enteric methane emissions from cattle. Agric. For. Meteorol. 2017, 232, 527–535. [Google Scholar] [CrossRef]
- Holechek, J.L.; Pieper, R.D.; Herbel, C.H. Range Management. Principles and Practices; Prentice-Hall: Upper Saddle River, NJ, USA, 1989. [Google Scholar]
- Andriamandroso, A.L.H.; Bindelle, J.; Mercatoris, B.; Lebeau, F. A review on the use of sensors to monitor cattle jaw movements and behavior when grazing. BASE 2016, 20, 273–286. [Google Scholar]
- Debauche, O.; Mahmoudi, S.; Andriamandroso, A.L.H.; Manneback, P.; Bindelle, J.; Lebeau, F. Web-based cattle behavior service for researchers based on the smartphone inertial central. Procedia Comput. Sci. 2017, 110, 110–116. [Google Scholar] [CrossRef]
- Laca, E.A. Precision livestock production: Tools and concepts. Rev. Bras. Zootec. 2009, 38, 123–132. [Google Scholar] [CrossRef]
- Larson-Praplan, S.; George, M.; Buckhouse, J.; Laca, E. Spatial and temporal domains of scale of grazing cattle. Anim. Prod. Sci. 2015, 55, 284–297. [Google Scholar] [CrossRef]
- French, P.; O’Brien, B.; Shalloo, L. Development and adoption of new technologies to increase the efficiency and sustainability of pasture-based systems. Anim. Prod. Sci. 2015, 55, 931–935. [Google Scholar] [CrossRef]
- Schellberg, J.; Verbruggen, E. Frontiers and perspectives on research strategies in grassland technology. Crop Pasture Sci. 2014, 65, 508–523. [Google Scholar] [CrossRef]
- Andriamandroso, A.; Castro Muñoz, E.; Blaise, Y.; Bindelle, J.; Lebeau, F. Differentiating pre-and post-grazing pasture heights using a 3D camera: A prospective approach. Precis. Livest. Farming ‘17 2017, 238–246. [Google Scholar]
- Van Evert, F.; Polder, G.; Van Der Heijden, G.; Kempenaar, C.; Lotz, L. Real-time vision-based detection of Rumex obtusifolius in grassland. Weed Res. 2009, 49, 164–174. [Google Scholar] [CrossRef]
- Handcock, R.N.; Swain, D.L.; Bishop-Hurley, G.J.; Patison, K.P.; Wark, T.; Valencia, P.; Corke, P.; O’Neill, C.J. Monitoring animal behaviour and environmental interactions using wireless sensor networks, GPS collars and satellite remote sensing. Sensors 2009, 9, 3586–3603. [Google Scholar] [CrossRef] [PubMed]
- Tilly, N.; Hoffmeister, D.; Cao, Q.; Huang, S.; Lenz-Wiedemann, V.; Miao, Y.; Bareth, G. Multitemporal crop surface models: Accurate plant height measurement and biomass estimation with terrestrial laser scanning in paddy rice. J. Appl. Remote Sens. 2014, 8, 083671. [Google Scholar] [CrossRef]
- Schaefer, M.T.; Lamb, D.W. A combination of plant NDVI and LiDAR measurements improve the estimation of pasture biomass in tall fescue (Festuca arundinacea var. Fletcher). Remote Sens. 2016, 8, 109. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit. Assess. 2016, 188, 146. [Google Scholar] [CrossRef] [PubMed]
- Vermeulen, C.; Lejeune, P.; Lisein, J.; Sawadogo, P.; Bouché, P. Unmanned Aerial Survey of Elephants. PLoS ONE 2013, 8, e54700. [Google Scholar] [CrossRef] [PubMed]
- Michez, A.; Piégay, H.; Jonathan, L.; Claessens, H.; Lejeune, P. Mapping of riparian invasive species with supervised classification of Unmanned Aerial System (UAS) imagery. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 88–94. [Google Scholar] [CrossRef]
- Zhang, C.; Kovacs, J.M. The application of small unmanned aerial systems for precision agriculture: A review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Michez, A.; Bauwens, S.; Brostaux, Y.; Hiel, M.-P.; Garré, S.; Lejeune, P.; Dumont, B. How Far Can Consumer-Grade UAV RGB Imagery Describe Crop Production? A 3D and Multitemporal Modeling Approach Applied to Zea mays. Remote Sens. 2018, 10, 1798. [Google Scholar] [CrossRef]
- Lopez-Granados, F. Weed detection for site-specific weed management: Mapping and real-time approaches. Weed Res. 2011, 51, 1–11. [Google Scholar] [CrossRef]
- Yang, G.; Liu, J.; Zhao, C.; Li, Z.; Huang, Y.; Yu, H.; Xu, B.; Yang, X.; Zhu, D.; Zhang, X.; et al. Unmanned Aerial Vehicle Remote Sensing for Field-Based Crop Phenotyping: Current Status and Perspectives. Front. Plant Sci. 2017, 8, 1111. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.; Lee, H.-J.; Jung, J.-S.; Ko, H.-J. Mapping Herbage Biomass on a Hill Pasture using a Digital Camera with an Unmanned Aerial Vehicle System. J. Korean Soc. Grassl. Forage Sci. 2015, 35, 225–231. [Google Scholar] [CrossRef]
- Lee, H.; Lee, H.; Go, H. Estimating the spatial distribution of Rumex acetosella L. on hill pasture using UAV monitoring system and digital camera. J. Korean Soc. Grassl. Forage Sci. 2016, 36, 365–369. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. “Structure-from-Motion” photogrammetry: A low-cost, effective tool for geoscience applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Bareth, G.; Bolten, A.; Hollberg, J.; Aasen, H.; Burkart, A.; Schellberg, J. Feasibility study of using non-calibrated UAV-based RGB imagery for grassland monitoring: Case study at the Rengen Long-term Grassland Experiment (RGE), Germany. DGPF Tagungsband 2015, 24, 1–7. [Google Scholar]
- Viljanen, N.; Honkavaara, E.; Näsi, R.; Hakala, T.; Niemeläinen, O.; Kaivosoja, J. A Novel Machine Learning Method for Estimating Biomass of Grass Swards Using a Photogrammetric Canopy Height Model, Images and Vegetation Indices Captured by a Drone. Agriculture 2018, 8, 70. [Google Scholar] [CrossRef]
- Da Trindade, J.K.; Pinto, C.E.; Neves, F.P.; Mezzalira, J.C.; Bremm, C.; Genro, T.C.; Tischler, M.R.; Nabinger, C.; Gonda, H.L.; Carvalho, P.C. Forage allowance as a target of grazing management: Implications on grazing time and forage searching. Rangel. Ecol. Manag. 2012, 65, 382–393. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; d’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Javernick, L.; Brasington, J.; Caruso, B. Modeling the topography of shallow braided rivers using Structure-from-Motion photogrammetry. Geomorphology 2014, 213, 166–182. [Google Scholar] [CrossRef]
- Gonçalves, J.; Henriques, R. UAV photogrammetry for topographic monitoring of coastal areas. ISPRS J. Photogramm. Remote Sens. 2015, 104, 101–111. [Google Scholar] [CrossRef]
- Rouse, J., Jr.; Haas, R.; Schell, J.; Deering, D. Monitoring Vegetation Systems in the Great Plains with ERTS. 1974. Available online: http://adsabs.harvard.edu/abs/1974NASSP.351..309R (accessed on 24 January 2019).
- Barnes, E.; Clarke, T.; Richards, S.; Colaizzi, P.; Haberland, J.; Kostrzewski, M.; Waller, P.; Choi, C.; Riley, E.; Thompson, T.; et al. Coincident detection of crop water stress, nitrogen status and canopy density using ground based multispectral data. In Proceedings of the Fifth International Conference on Precision Agriculture, Bloomington, MN, USA, 16–19 July 2000; Volume 1619. [Google Scholar]
- Moges, S.; Raun, W.; Mullen, R.; Freeman, K.; Johnson, G.; Solie, J. Evaluation of green, red, and near infrared bands for predicting winter wheat biomass, nitrogen uptake, and final grain yield. J. Plant Nutr. 2005, 27, 1431–1441. [Google Scholar] [CrossRef]
- Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial Color Infrared Photography for Determining Early In-Season Nitrogen Requirements in Corn. Agron. J. 2006, 98, 968–977. [Google Scholar] [CrossRef]
- Akaike, H. Maximum likelihood identification of Gaussian autoregressive moving average models. Biometrika 1973, 60, 255–265. [Google Scholar] [CrossRef]
- Venables, W.N.; Ripley, B.D. Modern Applied Statistics with S, 4th ed.; Springer: New York, NY, USA, 2002. [Google Scholar]
- Lindeman, R.; Merenda, P.; Gold, R. Introduction to Bivariate and Multivariate Analysis; Foresman and Co.: London, UK, 1980. [Google Scholar]
- Harmoney, K.R.; Moore, K.J.; George, J.R.; Brummer, E.C.; Russell, J.R. Determination of pasture biomass using four indirect methods. Agron. J. 1997, 89, 665–672. [Google Scholar] [CrossRef]
- Laca, E.A.; Demment, M.W.; Winckel, J.; Kie, J.G. Comparison of weight estimate and rising-plate meter methods to measure herbage mass of a mountain meadow. J. Range Manag. 1989, 42, 71–75. [Google Scholar] [CrossRef]
- Rowbottom, M. Potential of Unmanned Aerial Vehicles (UAV) and Remote Sensing to Accurately Estimatepasture Biomass in Intensively Grazed Dairy Pastures; School of Earth and Environment, University of Western Australia: Perth, Australia, 2015. [Google Scholar]
- Andriamandroso, A.L.H.; Lebeau, F.; Beckers, Y.; Froidmont, E.; Dufrasne, I.; Heinesch, B.; Dumortier, P.; Blanchy, G.; Blaise, Y.; Bindelle, J. Development of an open-source algorithm based on inertial measurement units (IMU) of a smartphone to detect cattle grass intake and ruminating behaviors. Comput. Electron. Agric. 2017, 139, 126–137. [Google Scholar] [CrossRef] [Green Version]






| Vegetation Index | Formula | Parameter | Reference |
|---|---|---|---|
| Normalized Difference Vegetation Index (NDVI) | (NIR − RED)/(NIR + RED) | Photosynthetic activity, plant stress | [35] |
| Normalized Difference Red Edge (NDRE) | (NIR − REDEDGE)/(NIR + REDEDGE) | Chlorophyll and nitrogen content | [36] |
| Green NDVI (GNDVI) | (NIR − GREEN)/(NIR + GREEN) | More sensitive to chlorophyll-a concentration, monitoring of plant stress | [37] |
| Green Ratio Vegetation Index (GRVI) | NIR/GREEN | Photosynthetic activity | [38] |
| Name | Type | Ground Sampling Distance of the Layer (m) | Sensor |
|---|---|---|---|
| NDVI | Vegetation index (VI) | 0.05 | Multispectral (Sequoia) |
| NDRE | Vegetation index (VI) | 0.05 | Multispectral (Sequoia) |
| GNDVI | Vegetation index (VI) | 0.05 | Multispectral (Sequoia) |
| GRVI | Vegetation index (VI) | 0.05 | Multispectral (Sequoia) |
| Red (R) | Reflectance | 0.05 | Multispectral (Sequoia) |
| Green (G) | Reflectance | 0.05 | Multispectral (Sequoia) |
| Near Infra-Red (NIR) | Reflectance | 0.05 | Multispectral (Sequoia) |
| Red-Edge (RE) | Reflectance | 0.05 | Multispectral (Sequoia) |
| Sward Height Model (SHM) | 3D | 0.025 | RGB (Sony RX100) |
| Rel. Importance (%) | Regression Coefficients | Pr (>|t|) | ||
|---|---|---|---|---|
| UAS height (SHM) | 45 | 1.1 | 0.00105 | ** |
| GRVI | 27 | −0.1 | 0.00139 | ** |
| GNDVI | 17 | 6.5 | 0.01162 | * |
| NDRE | 11 | 0.8 | 0.04675 | * |
| Intercept | / | −4.2 | 0.01725 | * |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Michez, A.; Lejeune, P.; Bauwens, S.; Herinaina, A.A.L.; Blaise, Y.; Castro Muñoz, E.; Lebeau, F.; Bindelle, J. Mapping and Monitoring of Biomass and Grazing in Pasture with an Unmanned Aerial System. Remote Sens. 2019, 11, 473. https://doi.org/10.3390/rs11050473
Michez A, Lejeune P, Bauwens S, Herinaina AAL, Blaise Y, Castro Muñoz E, Lebeau F, Bindelle J. Mapping and Monitoring of Biomass and Grazing in Pasture with an Unmanned Aerial System. Remote Sensing. 2019; 11(5):473. https://doi.org/10.3390/rs11050473
Chicago/Turabian StyleMichez, Adrien, Philippe Lejeune, Sébastien Bauwens, Andriamandroso Andriamasinoro Lalaina Herinaina, Yannick Blaise, Eloy Castro Muñoz, Frédéric Lebeau, and Jérôme Bindelle. 2019. "Mapping and Monitoring of Biomass and Grazing in Pasture with an Unmanned Aerial System" Remote Sensing 11, no. 5: 473. https://doi.org/10.3390/rs11050473
APA StyleMichez, A., Lejeune, P., Bauwens, S., Herinaina, A. A. L., Blaise, Y., Castro Muñoz, E., Lebeau, F., & Bindelle, J. (2019). Mapping and Monitoring of Biomass and Grazing in Pasture with an Unmanned Aerial System. Remote Sensing, 11(5), 473. https://doi.org/10.3390/rs11050473