Design and Characterization of the Multi-Band SWIR Receiver for the Lunar Flashlight CubeSat Mission

Abstract
:
1. Introduction
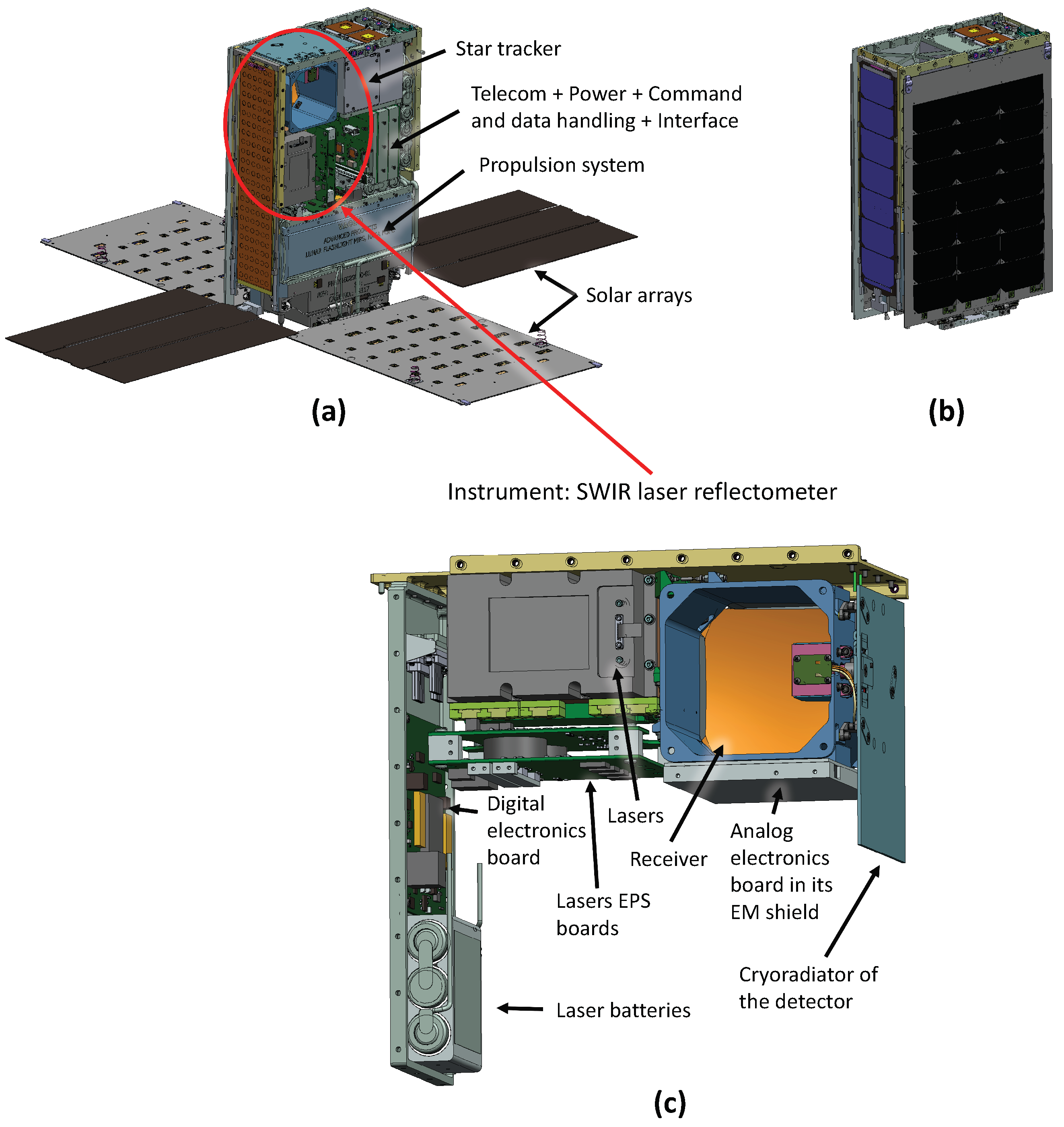
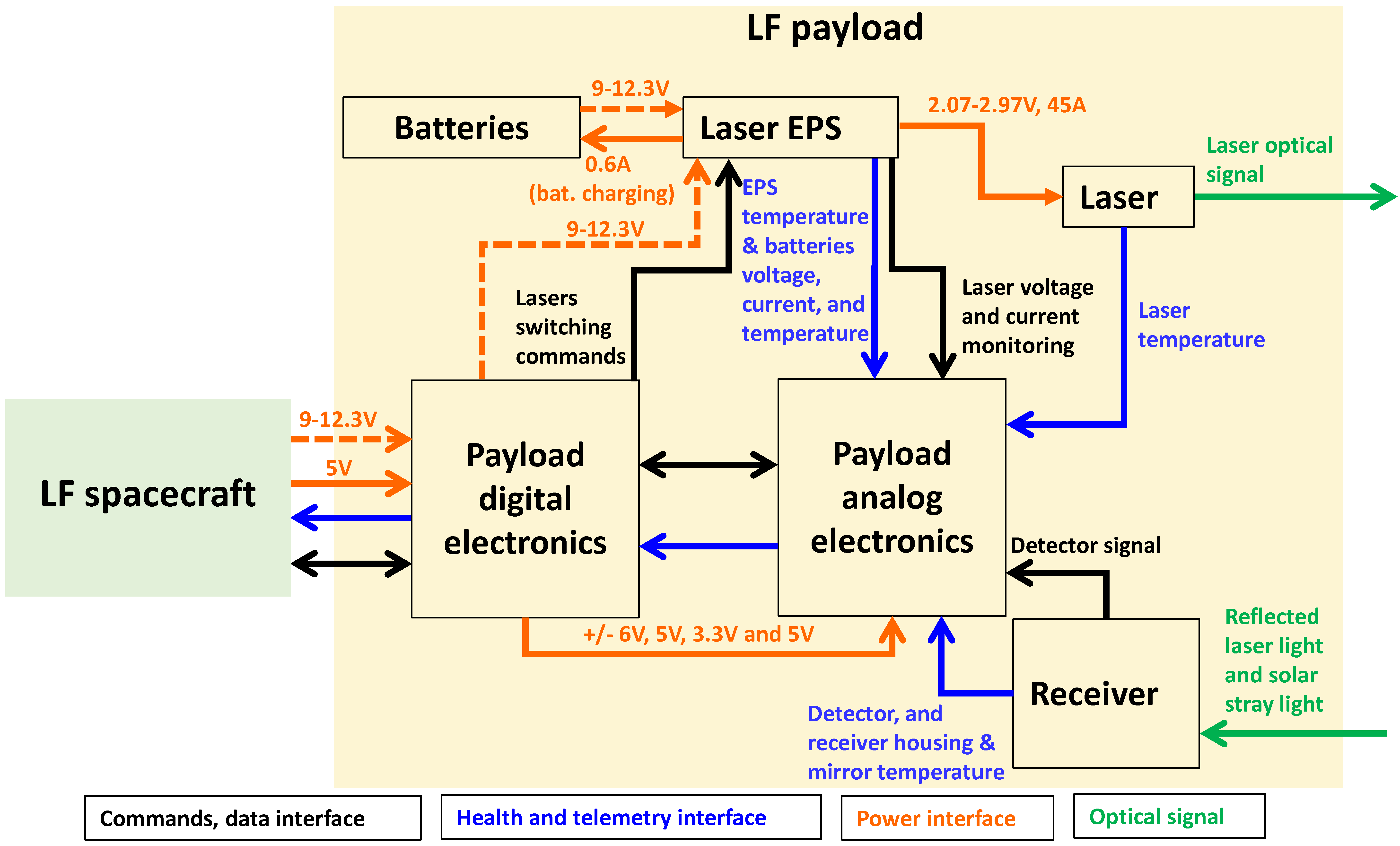
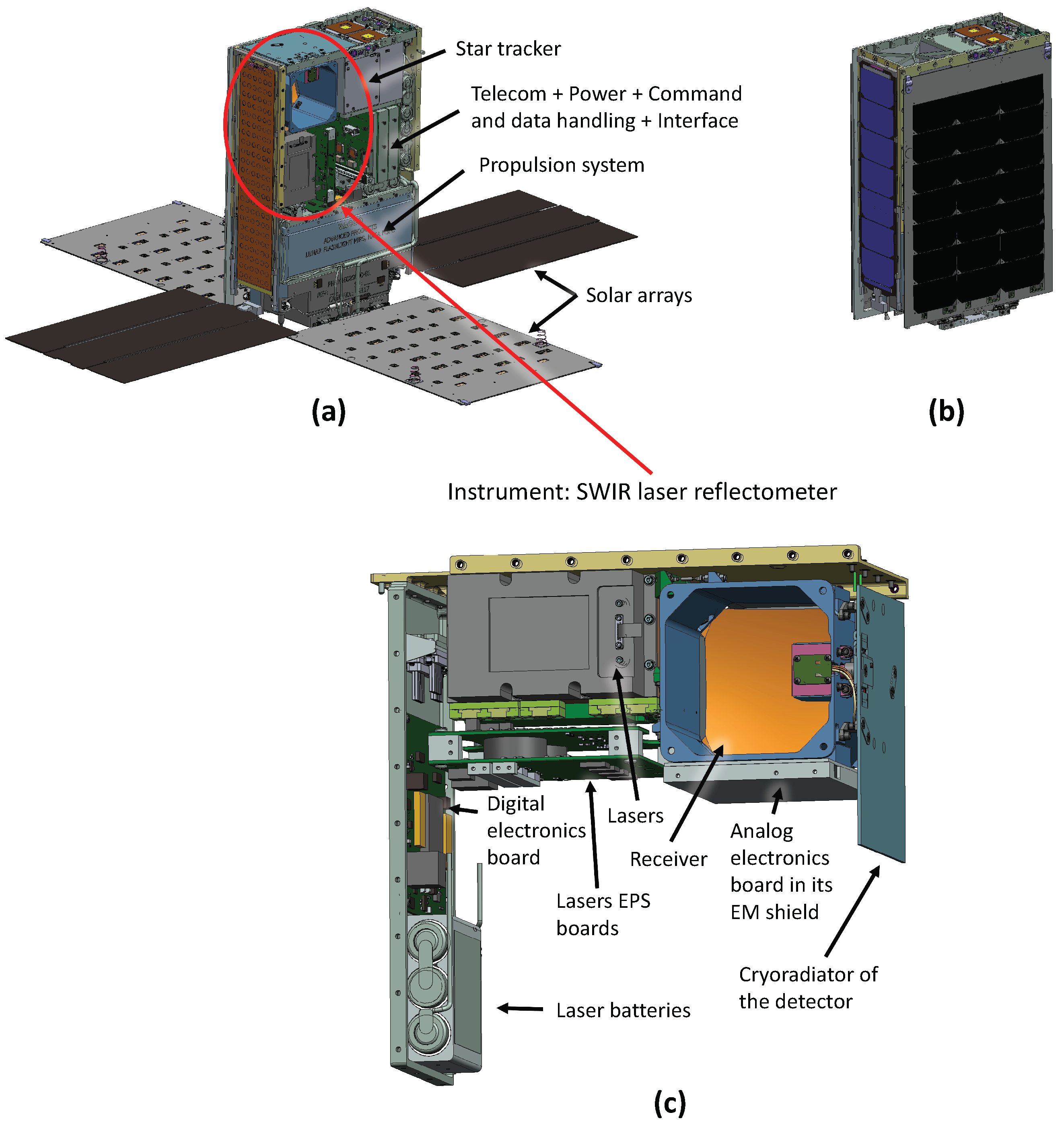
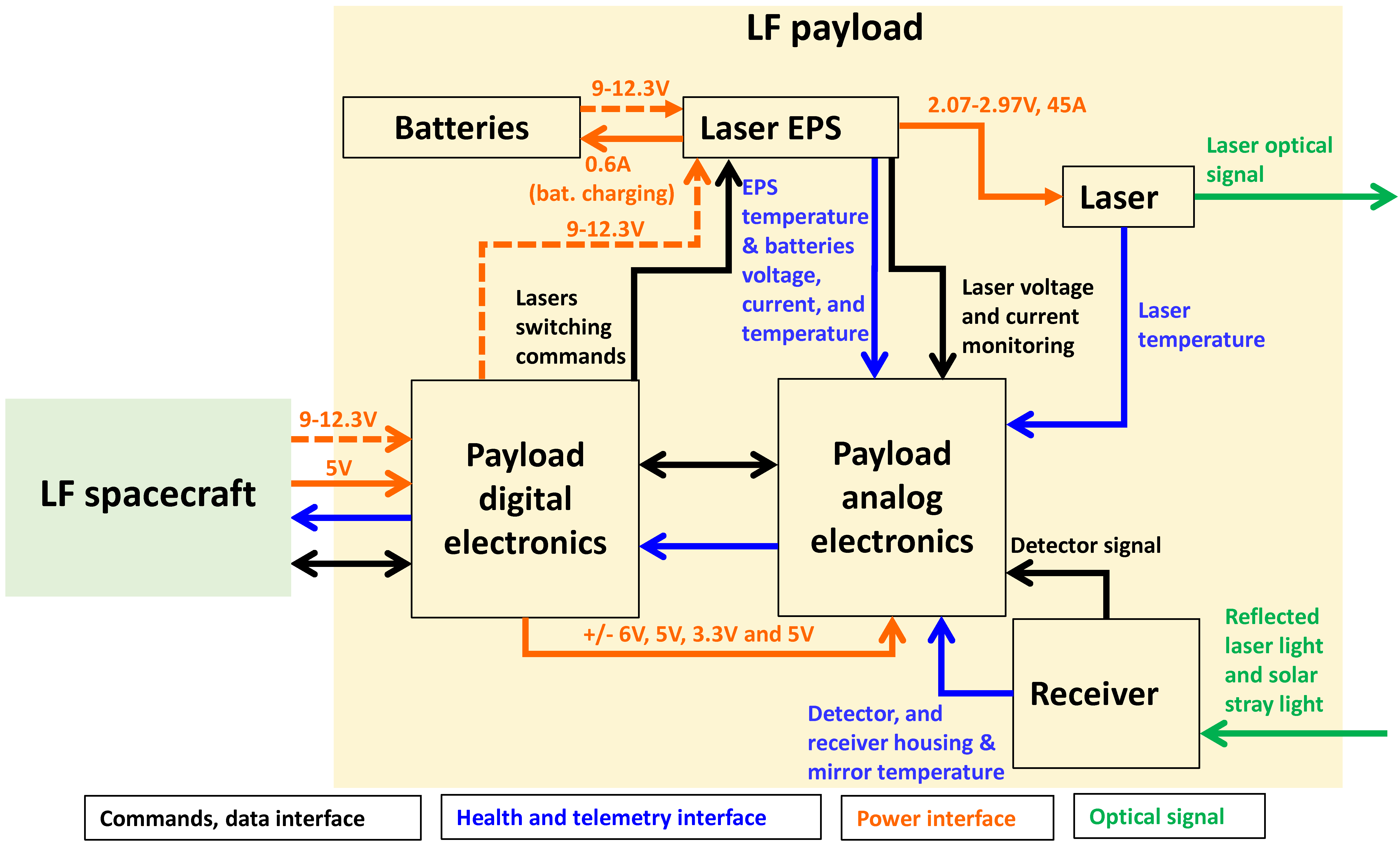
2. Lunar Flashlight CubeSat
3. Lunar Flashlight Mission
3.1. Measurement Goals
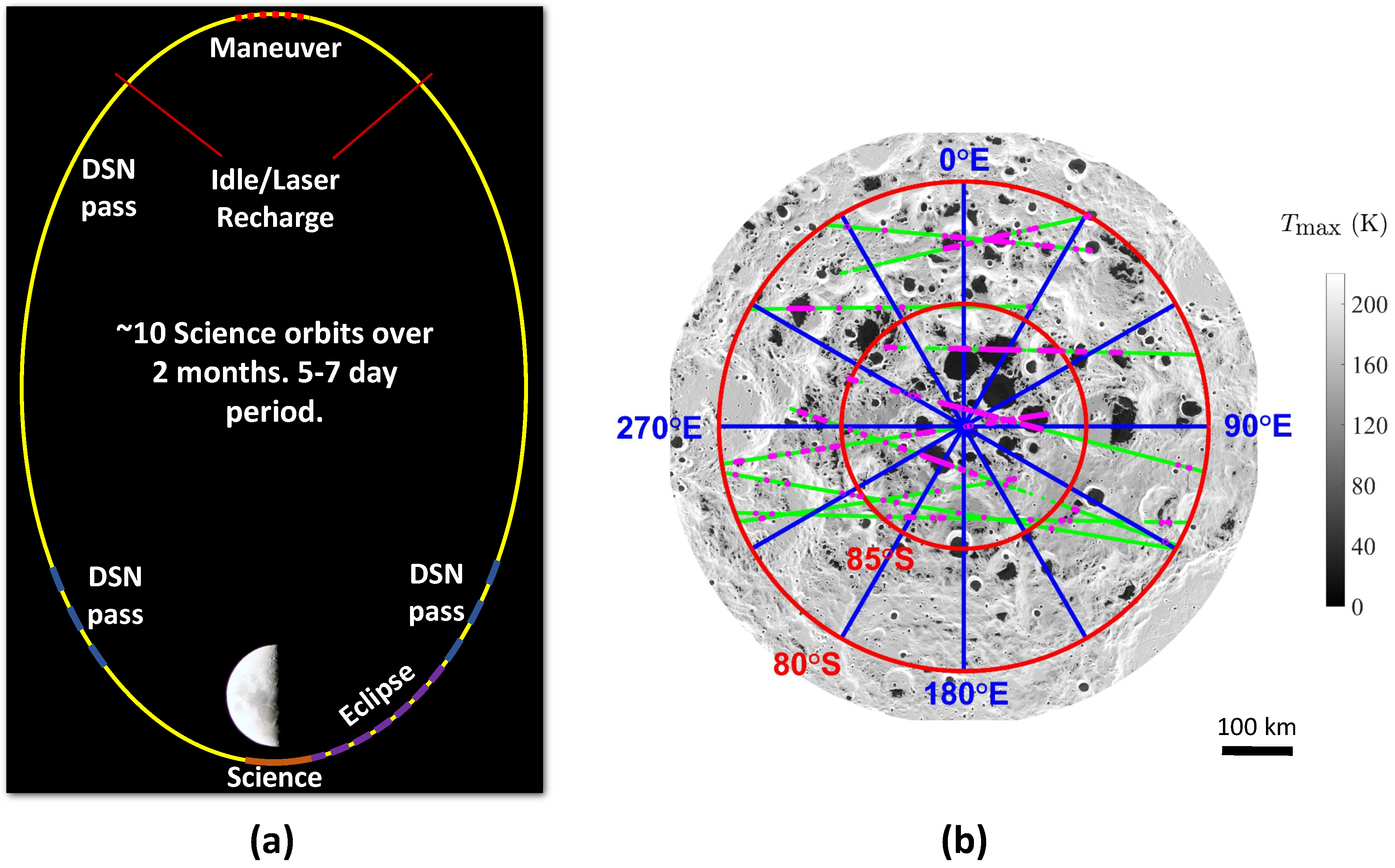
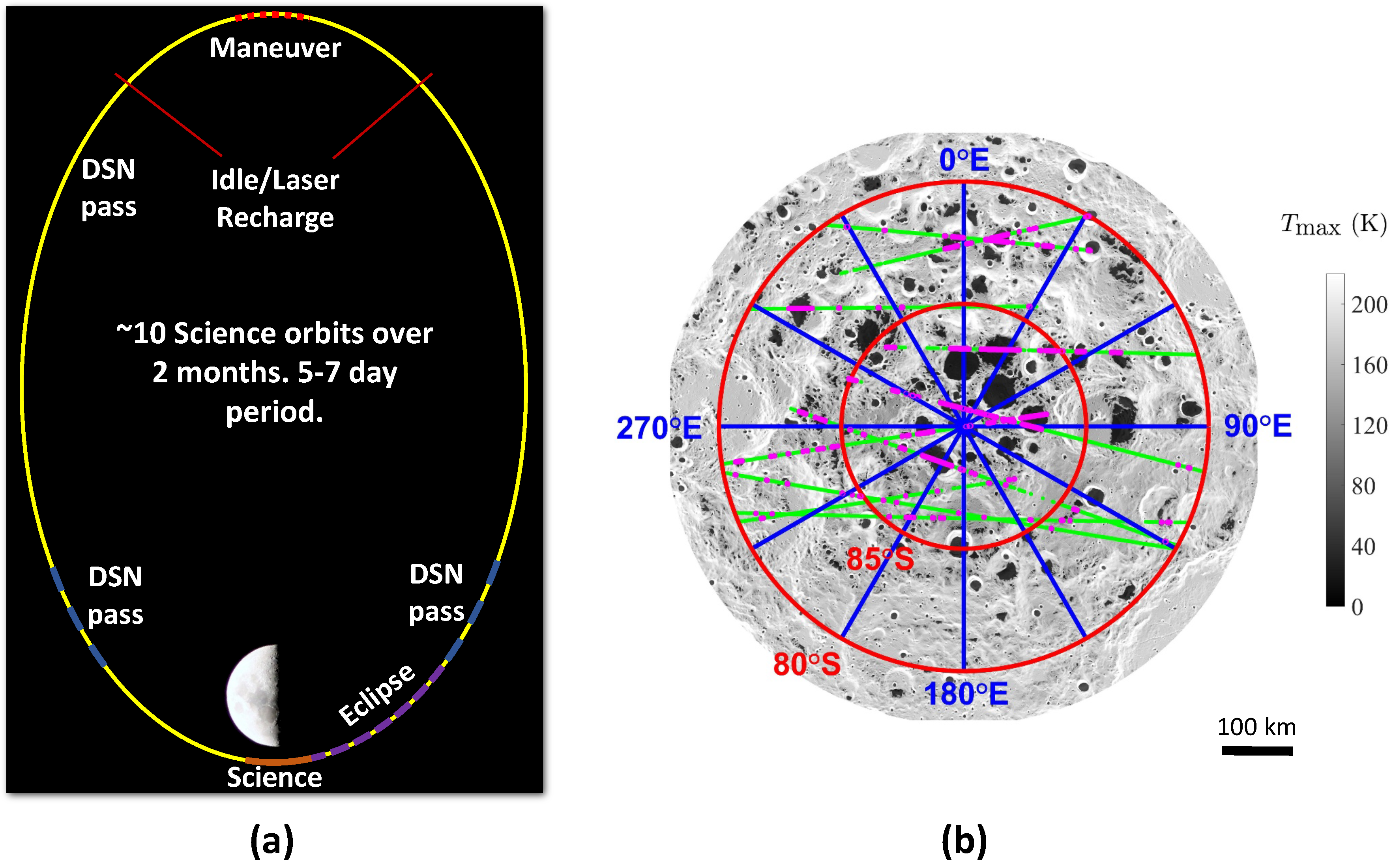
3.2. Mission Design
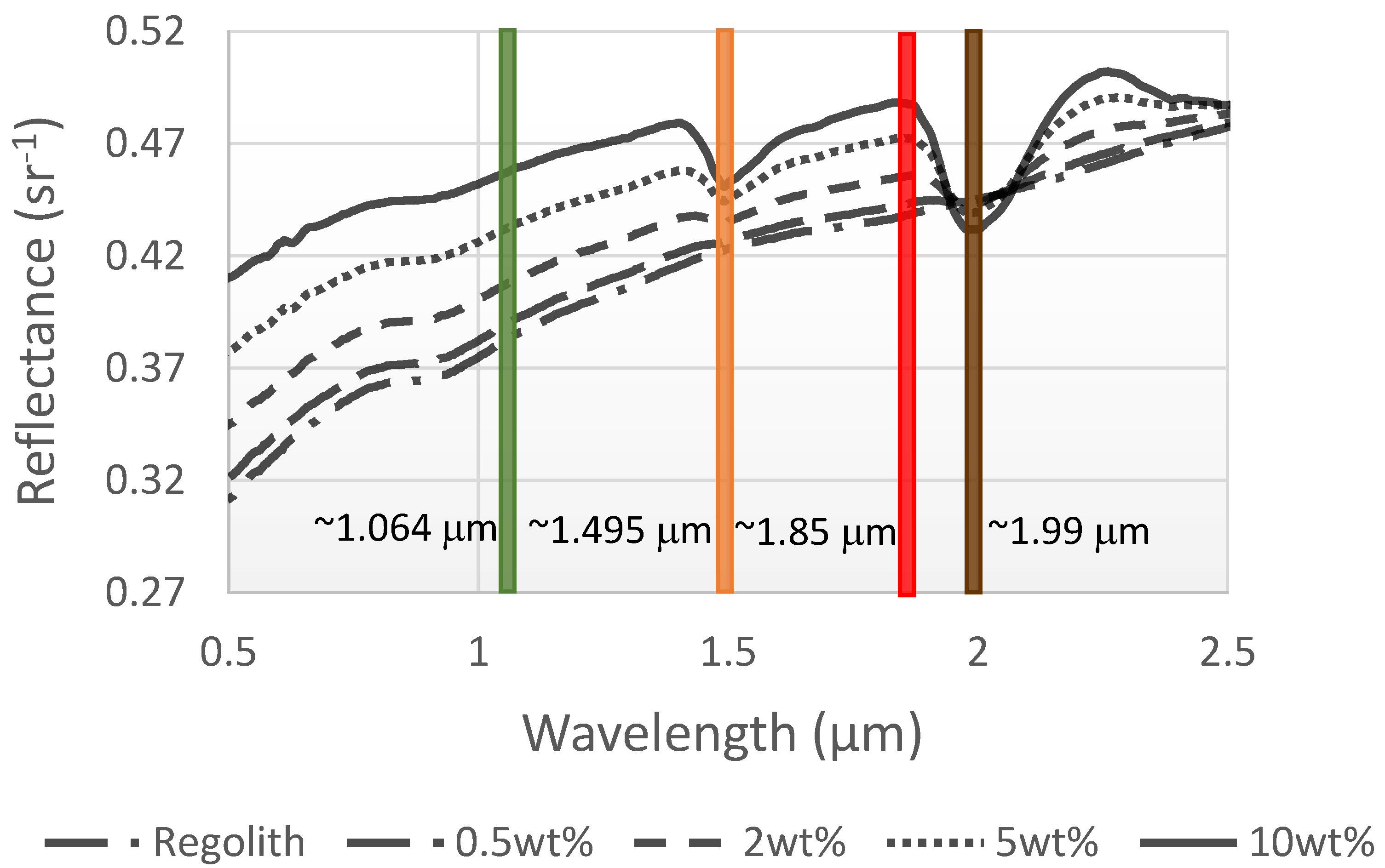
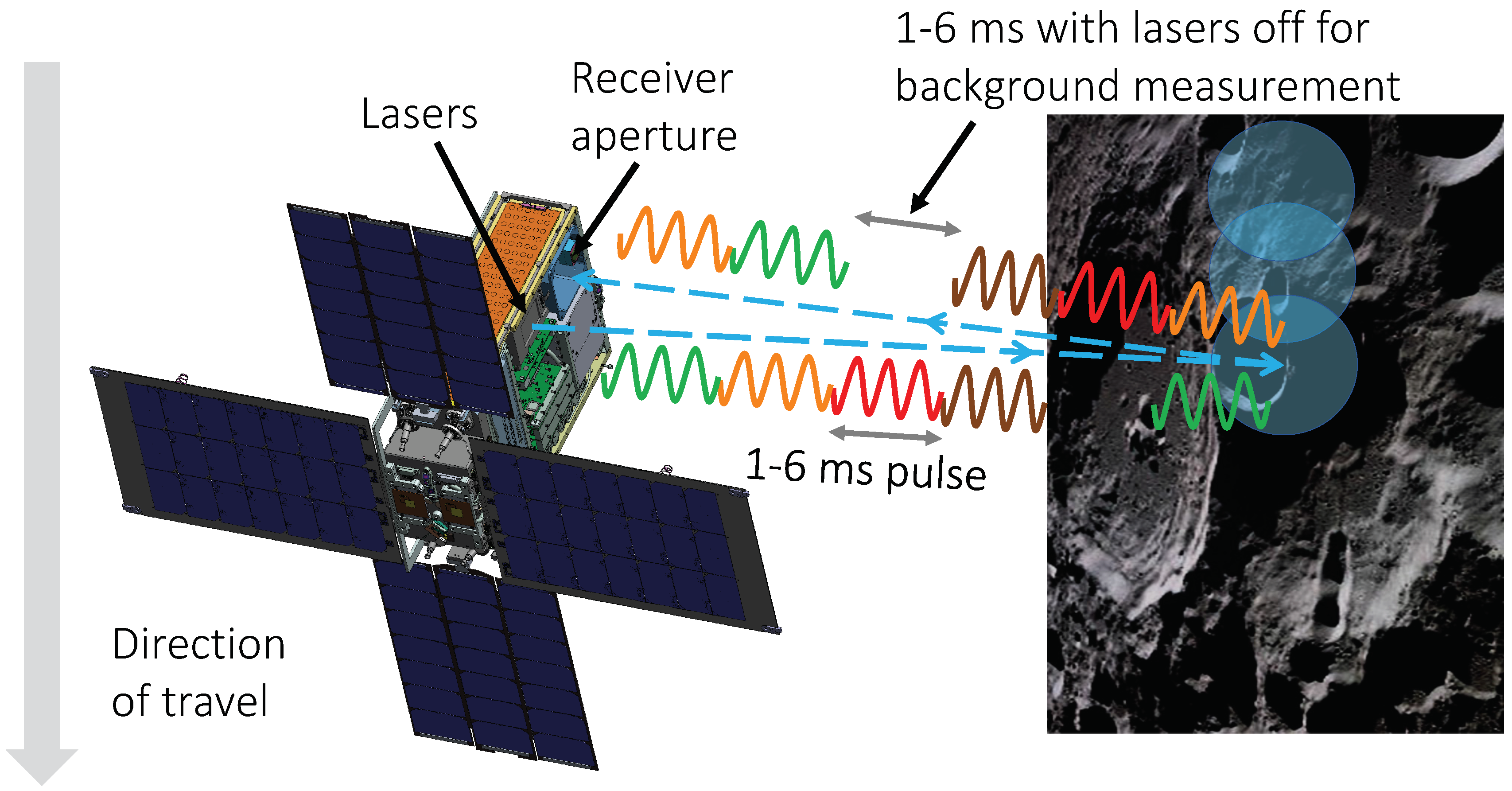
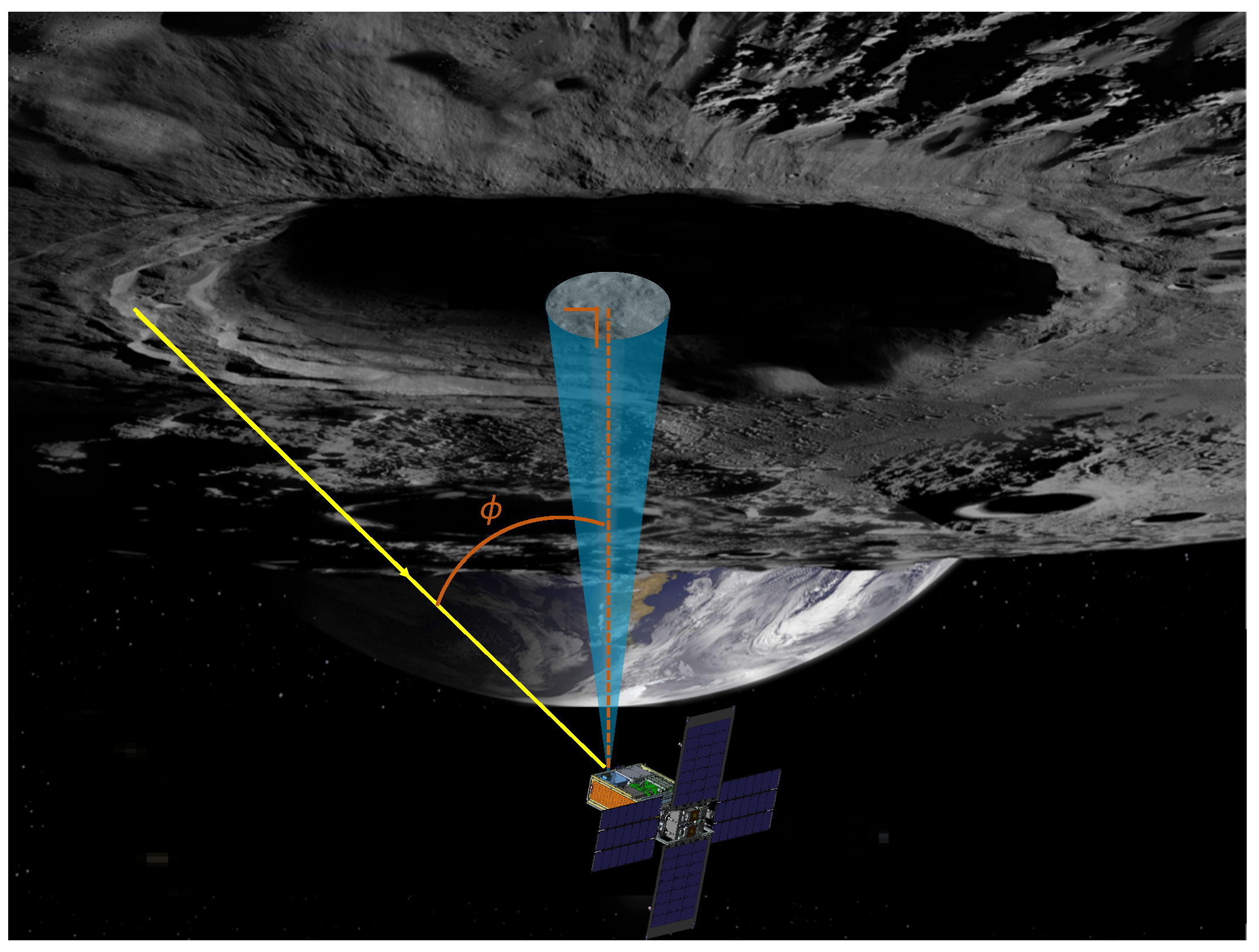
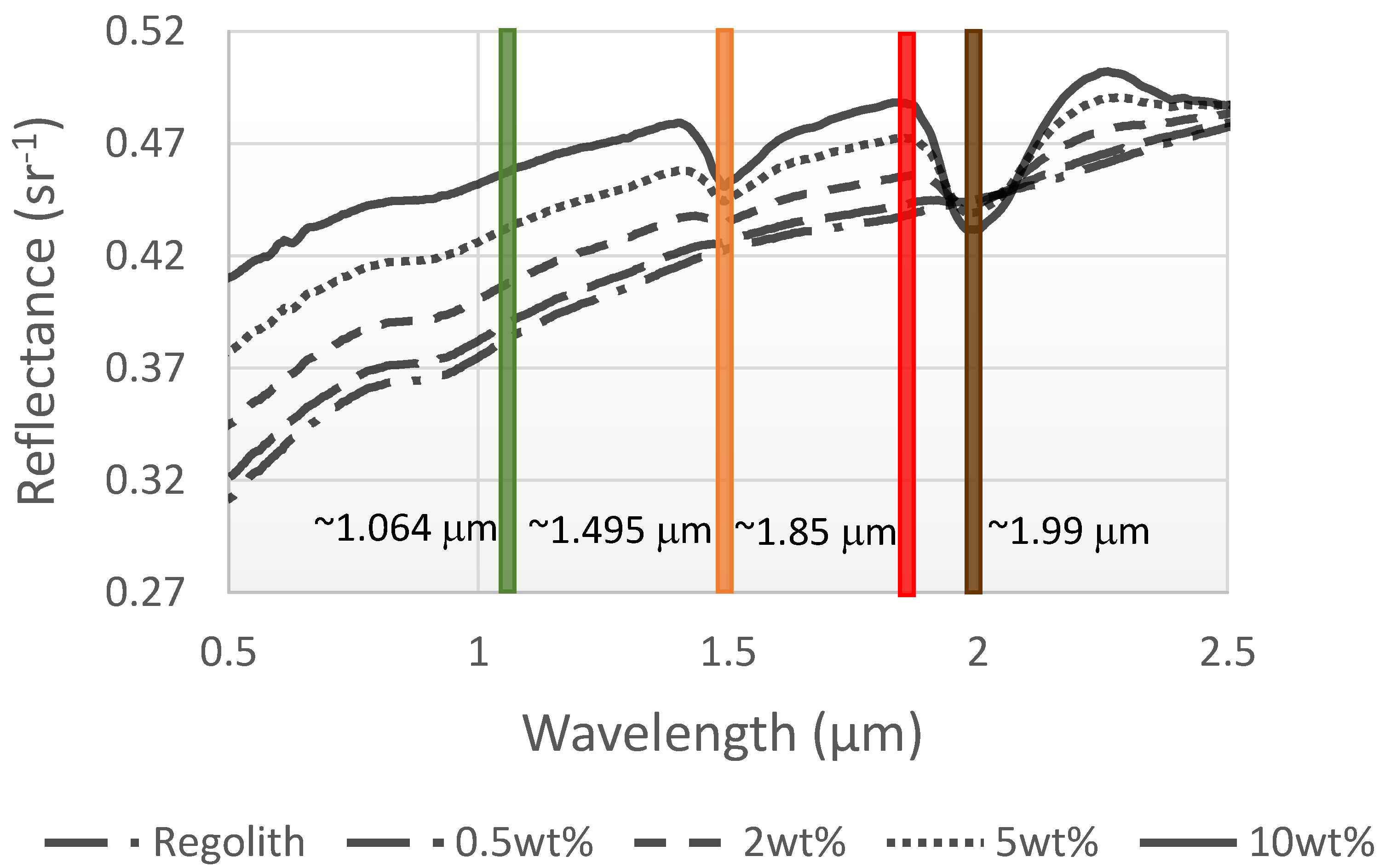
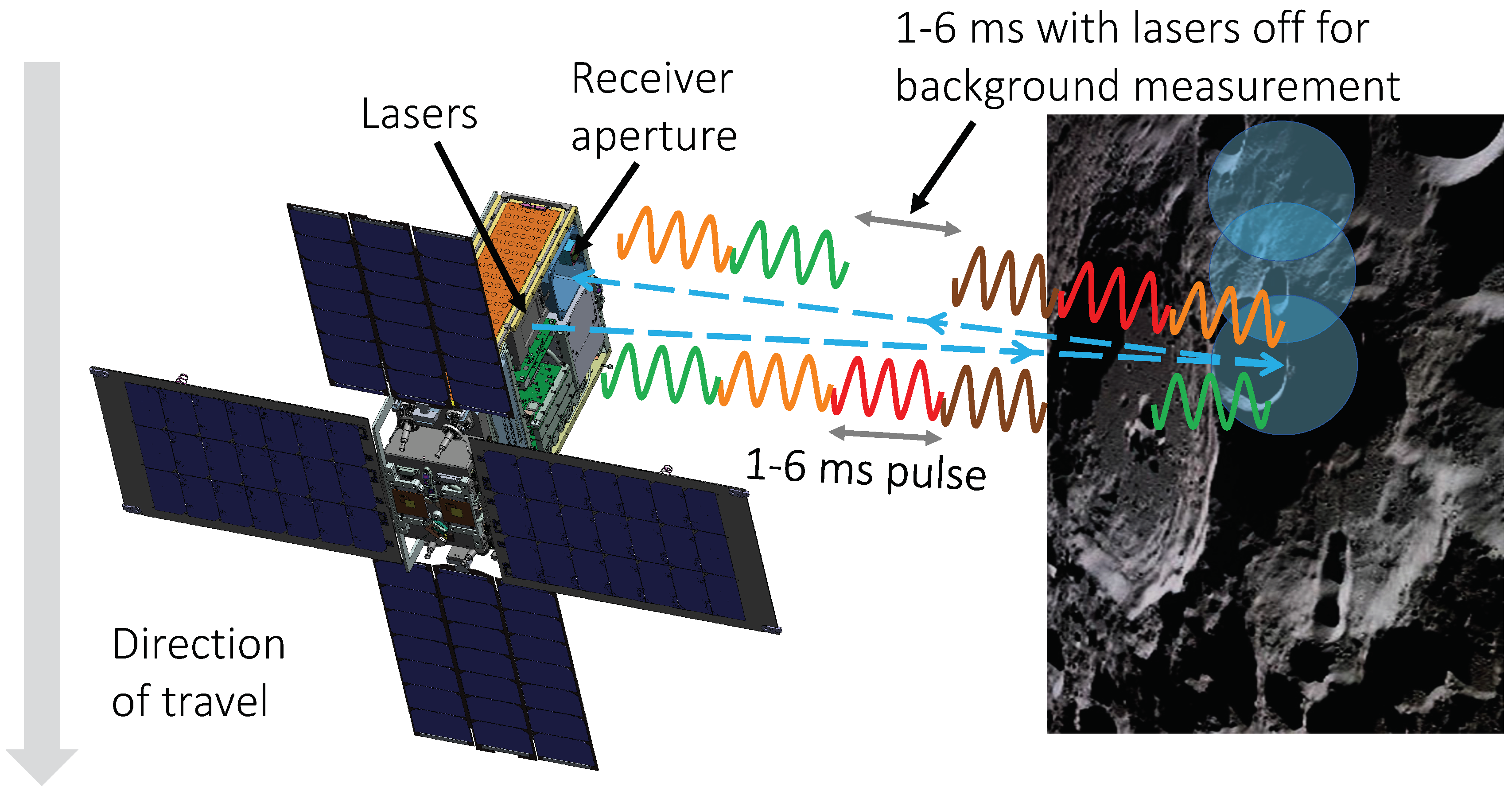
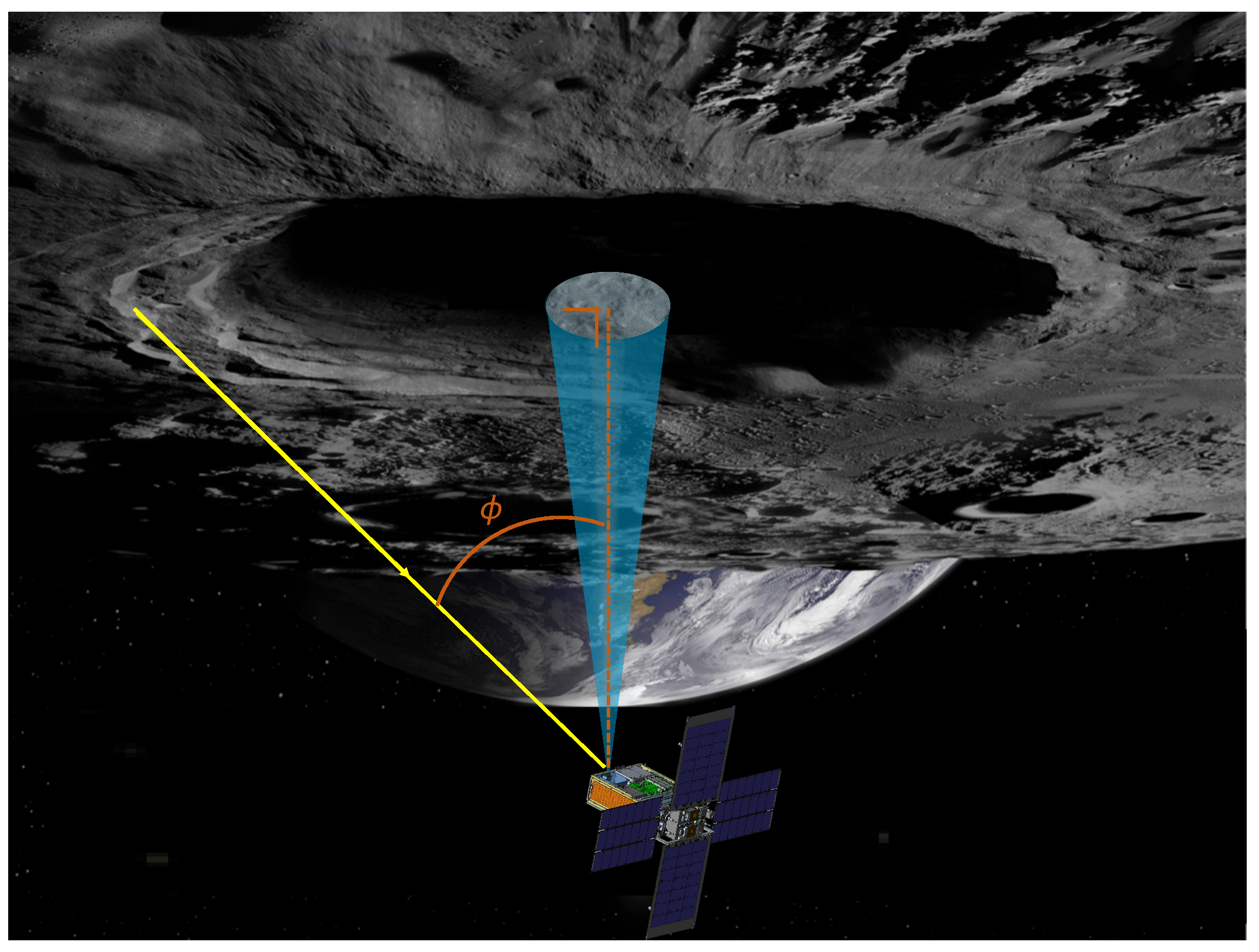
3.3. Principle of Operation
3.4. Algorithm to Derive Water Ice Content from the Instrument Signals and Instrument SNR Impact on Science Measurements
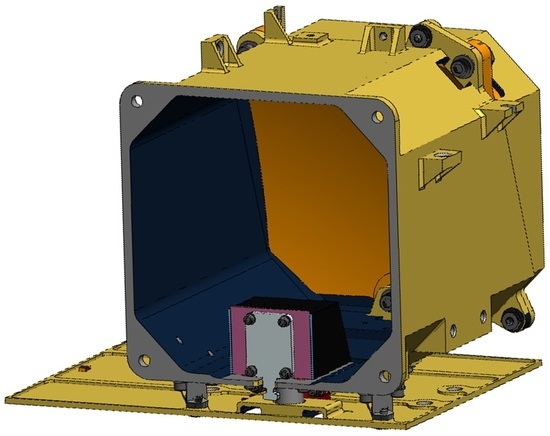
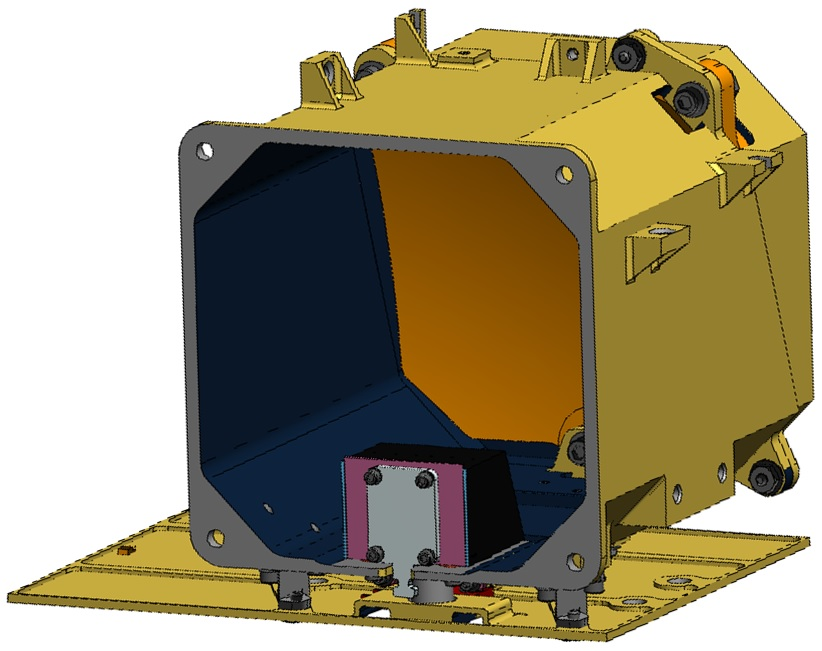
4. Receiver Optomechanical Design
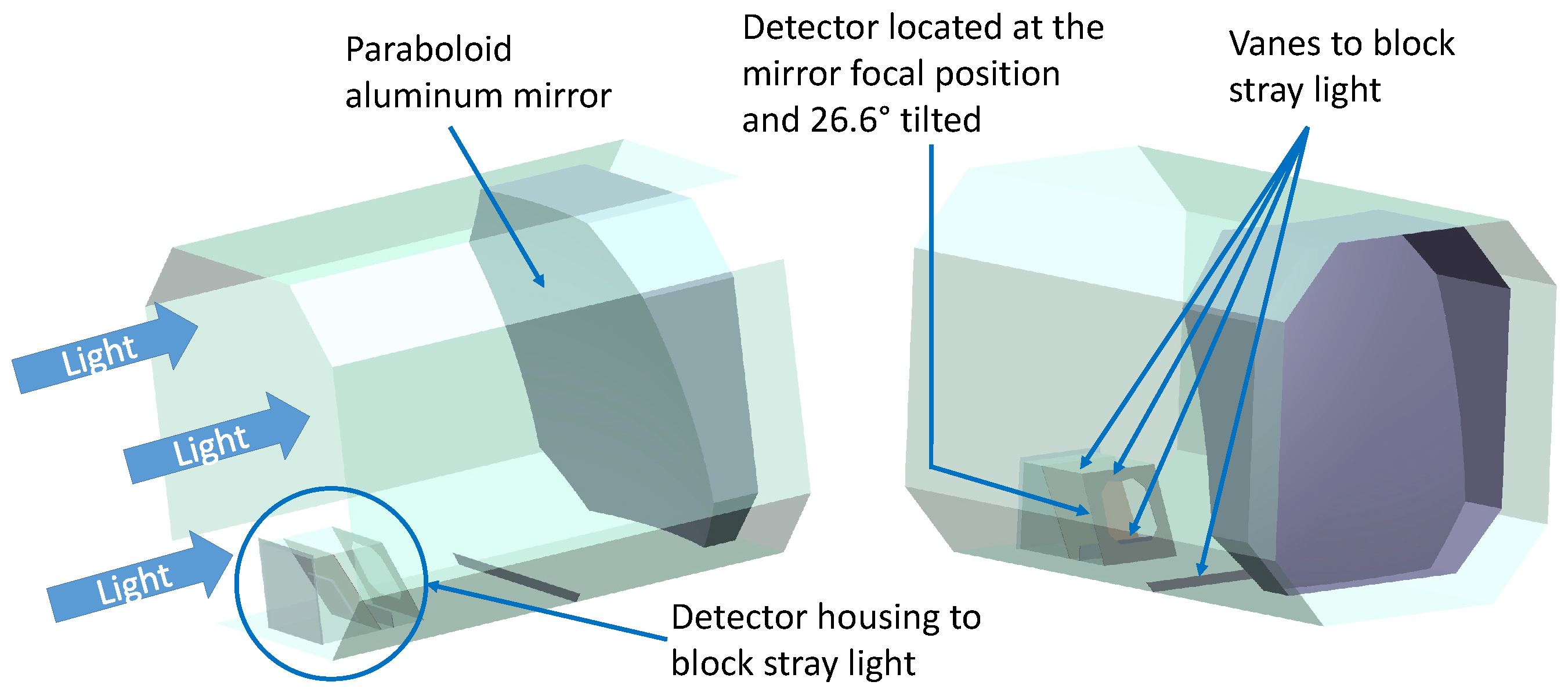
4.1. Receiver Optical Design
- At 1064 nm: 7.92 fA RMS
- At 1495 nm: 7.34 fA RMS
- At 1850 nm: 5.73 fA RMS
- At 1990 nm: 5.75 fA RMS
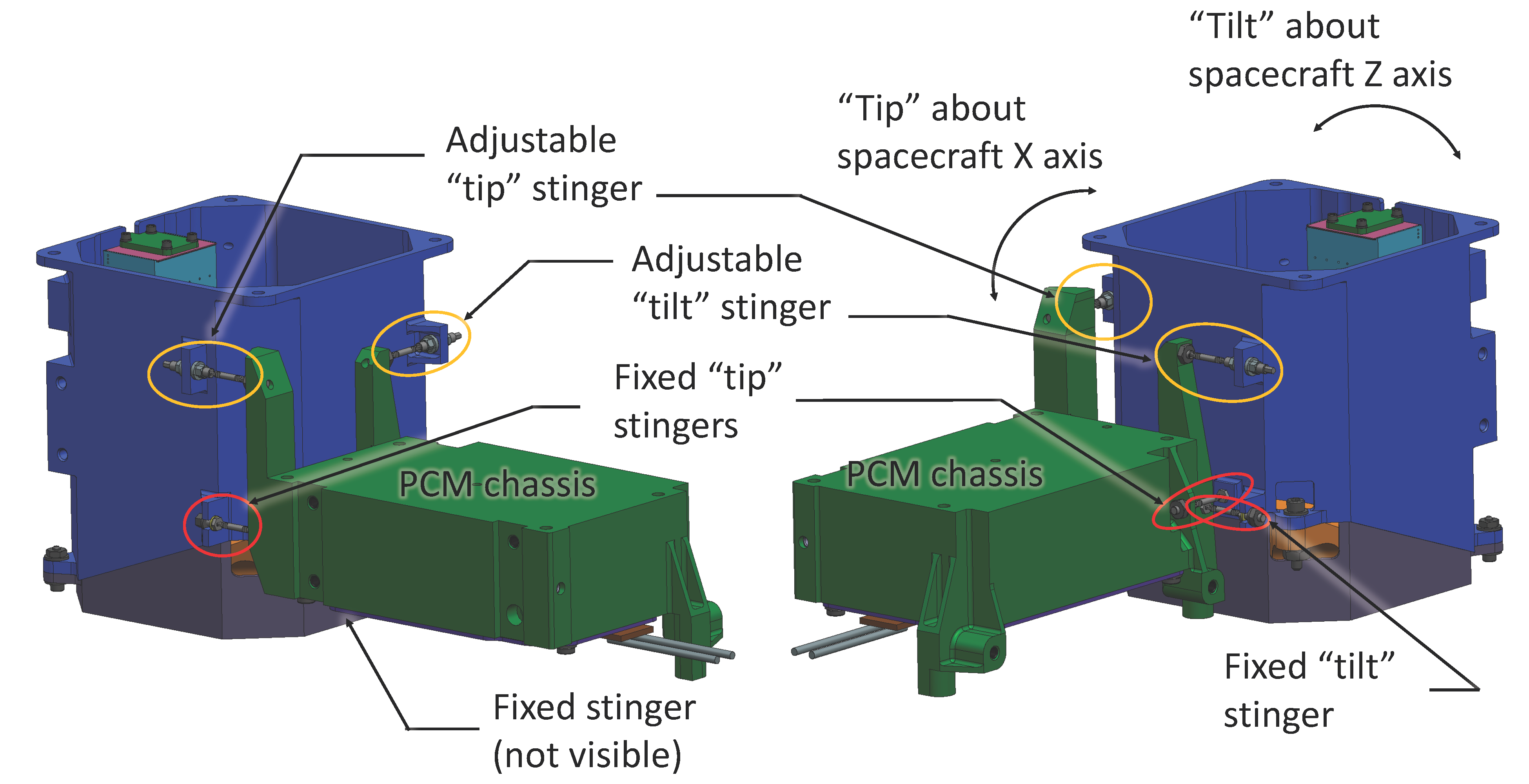
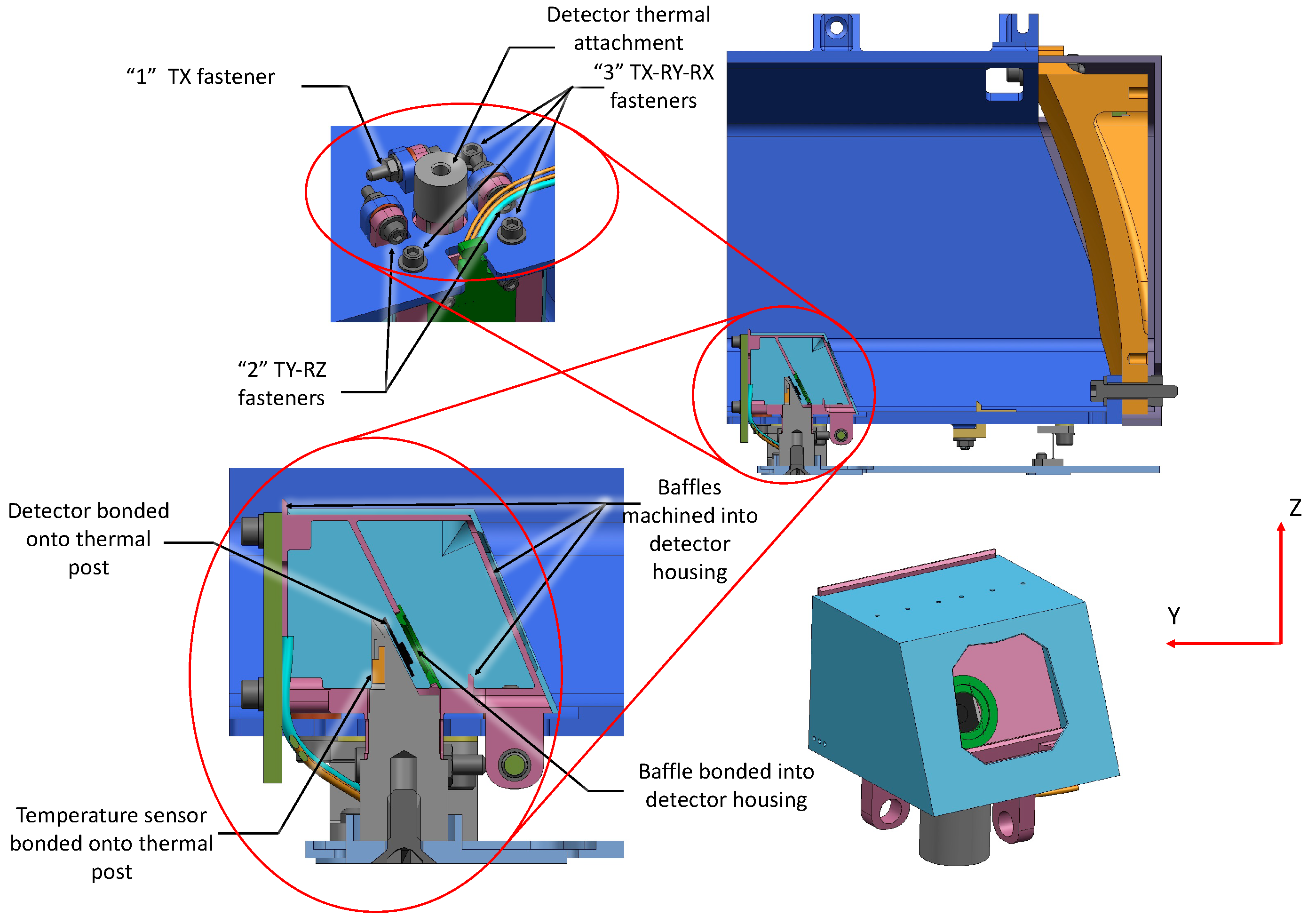
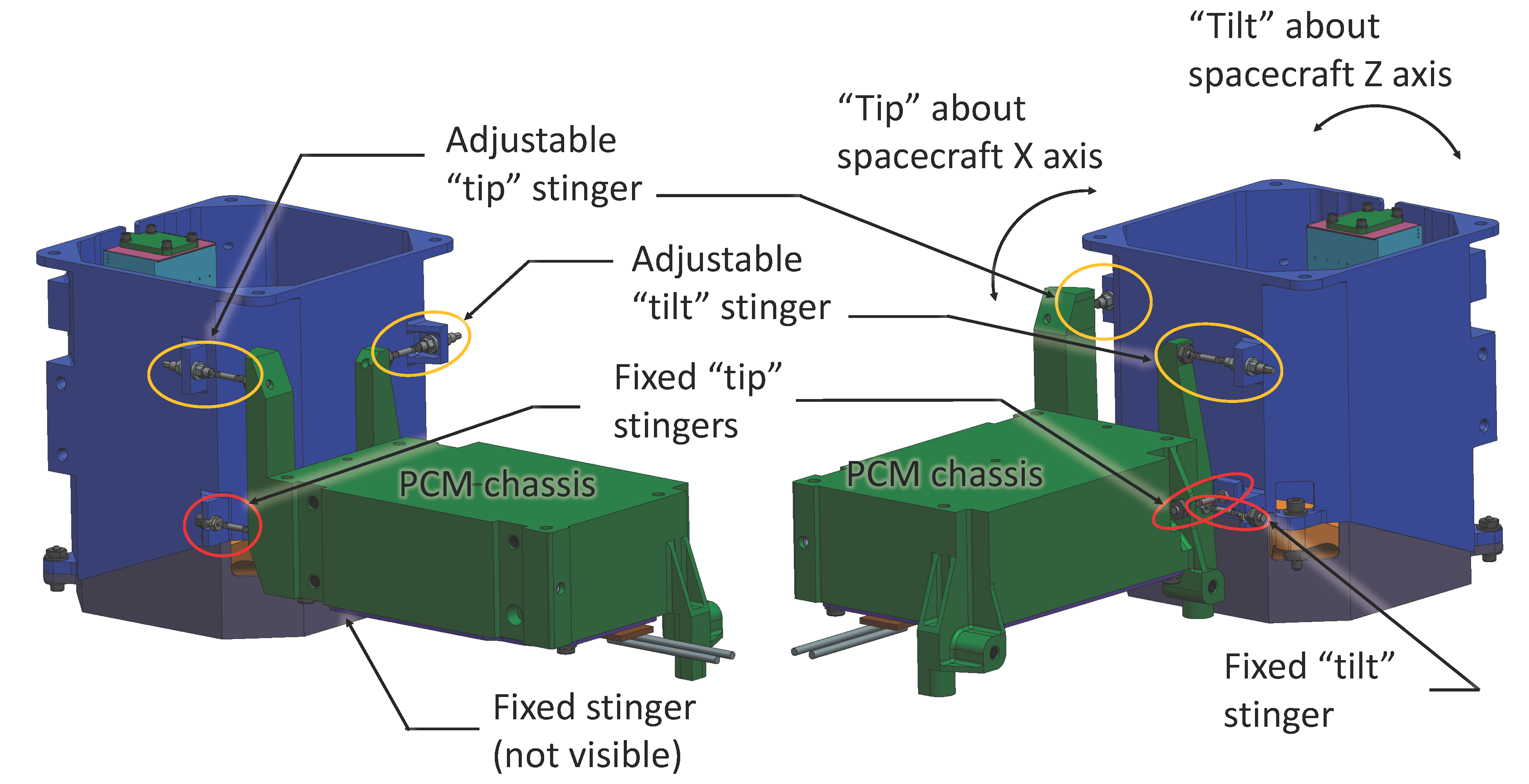
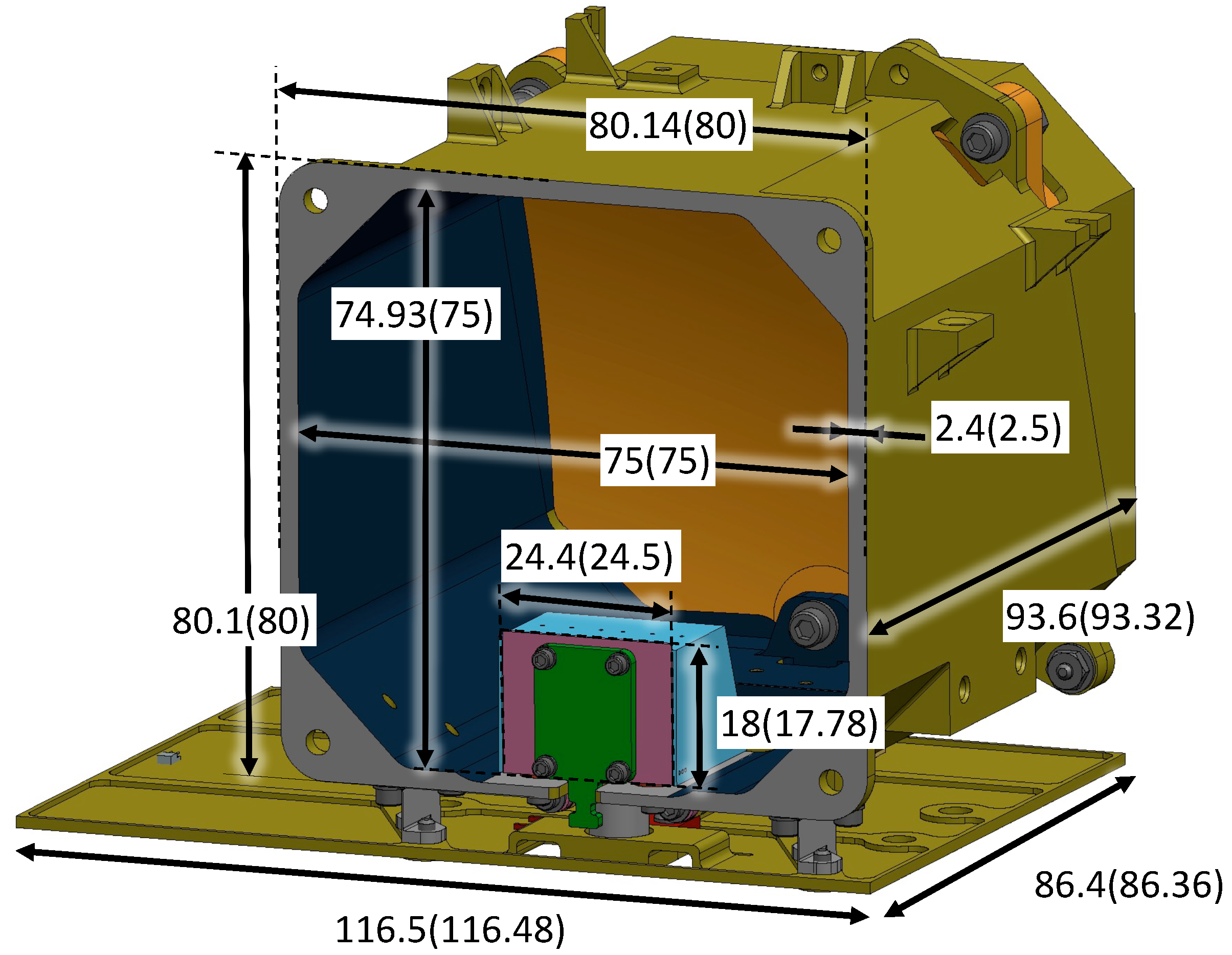
4.2. Receiver Thermal and Mechanical Designs
5. Receiver Characterization
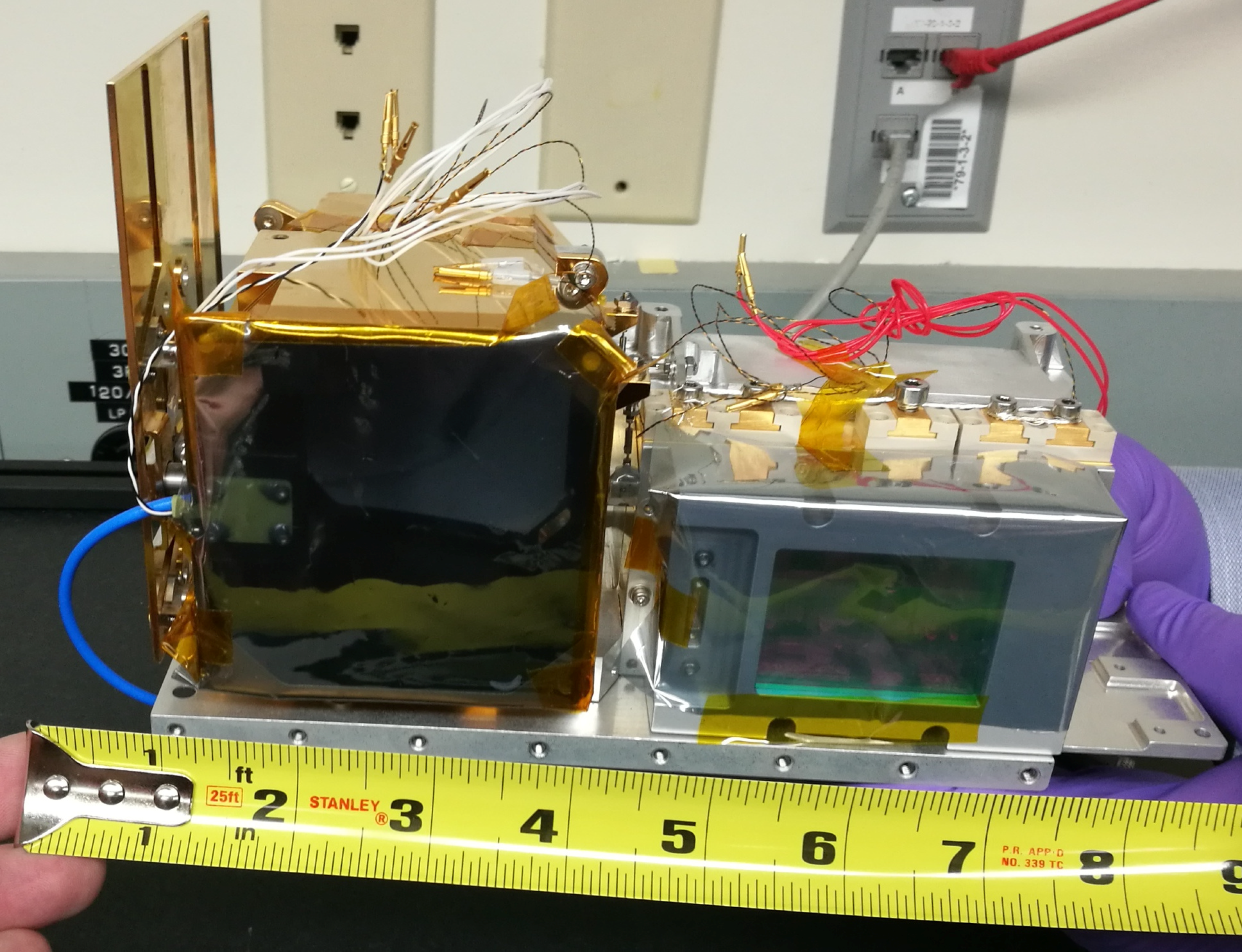
5.1. Flight Hardware Inspection after Delivery to the Jet Propulsion Laboratory
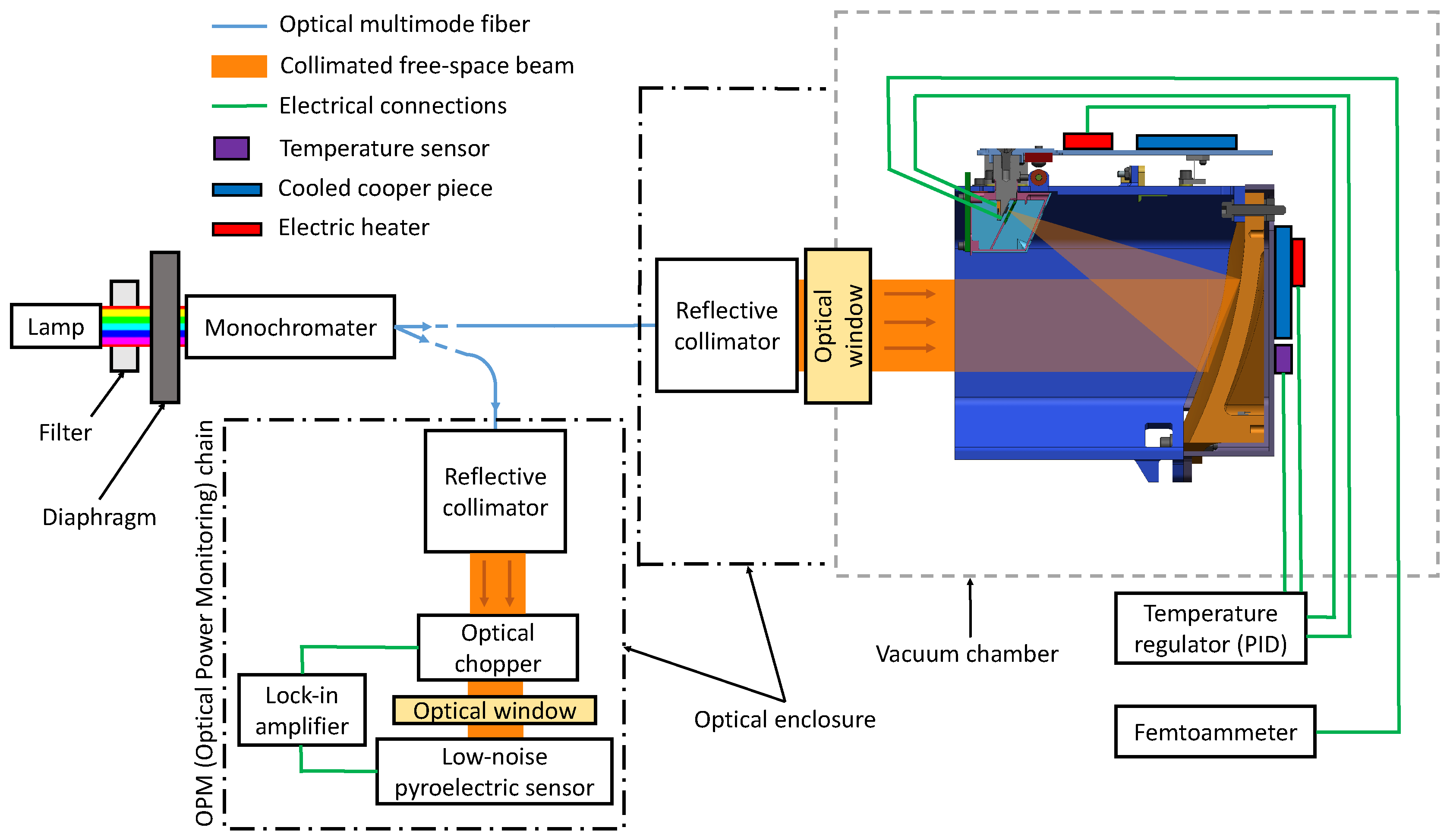
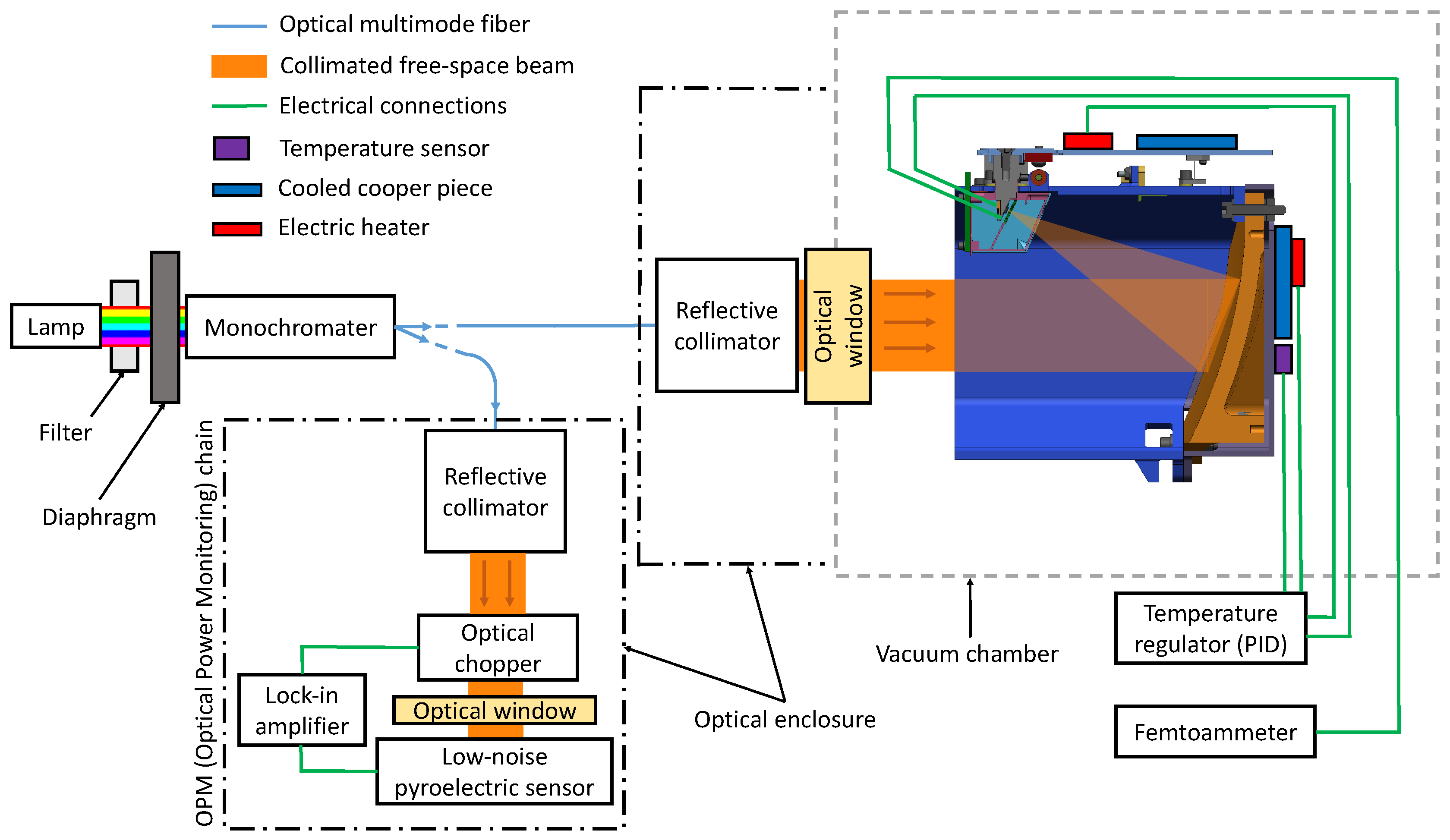
5.2. Spectral Charactarization of the Receiver
- 950-nm cut-on wavelength long-pass filter: “FEL0950” from Thorlabs.
- 1450-nm cut-on wavelength long-pass filter: “FEL1450” from Thorlabs.
- Temperature sensors: “DT-670” from Lake Shore Cryotronics, Inc.
- Monochromator: “SDMC1-06G #95 850-2.2u” monochromator from Optometrics aligned with a “TS-20W” tungsten lamp and controlled by a “PCM-02 110V” stepping motor controller (7-nm spectral linewidth, spectral repeatability: ≤0.5 nm).
- Fiber: “FG200LEA” multimode fiber from Thorlabs, 0.22 numerical aperture, Low-OH, Ø 200-µm core, 400 to 2400 nm.
- Reflective collimators: “RC12SMA-P01” and “RC02SMA-P01” protected silver-coated collimator from Thorlabs.
- Pyroelectric sensor: “THZ5B-BL-DZ” from Gentec Inc.
- Digital lock-in amplifier: “T-rad THz module” from Gentec Inc.
- Optical chopper: “SDC-500” from Gentec Inc.
- Femtoammeter: “Keithley 6430” with its remote pre-amplifier; parasitic bias introduced on the detector by the active feedback loop: <1 mV.
- Optical window: “VPW42” 1.5’’ diameter uncoated fused silica optical window from Thorlabs; parallelism: ≤5 arcsec, transmitted wavefront distortion: λ/8 at 633 nm.
- The monochromator was spectrally calibrated (spectral linewidth and wavelength as a function of stepper motor position, repeatability characterization) using the two different optical spectrum analyzers: “HP 70950A” for the 1064-nm and 1495-nm wavelengths, and “Yokogawa AQ6376” for the 1850-nm and 1990-nm wavelengths.
5.3. Characterization of the Dark Current and Detected Thermal Emission
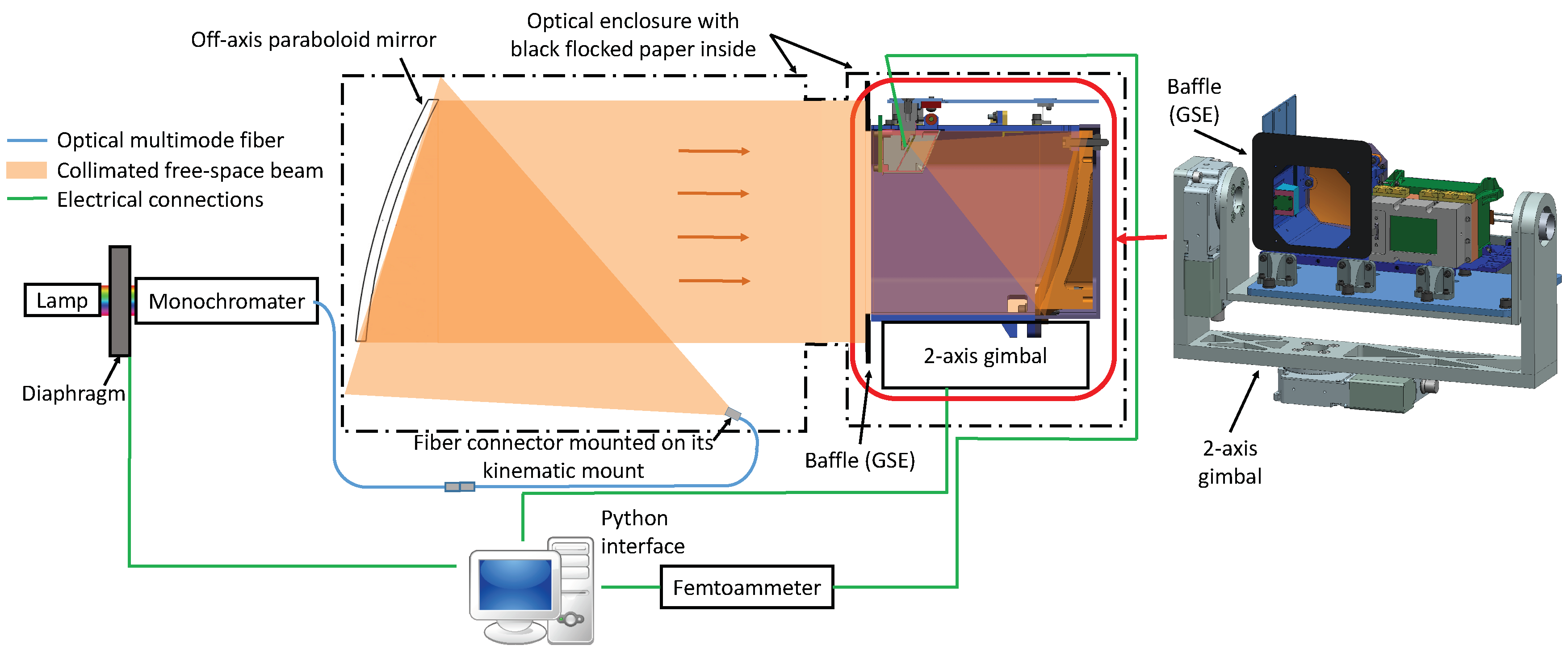
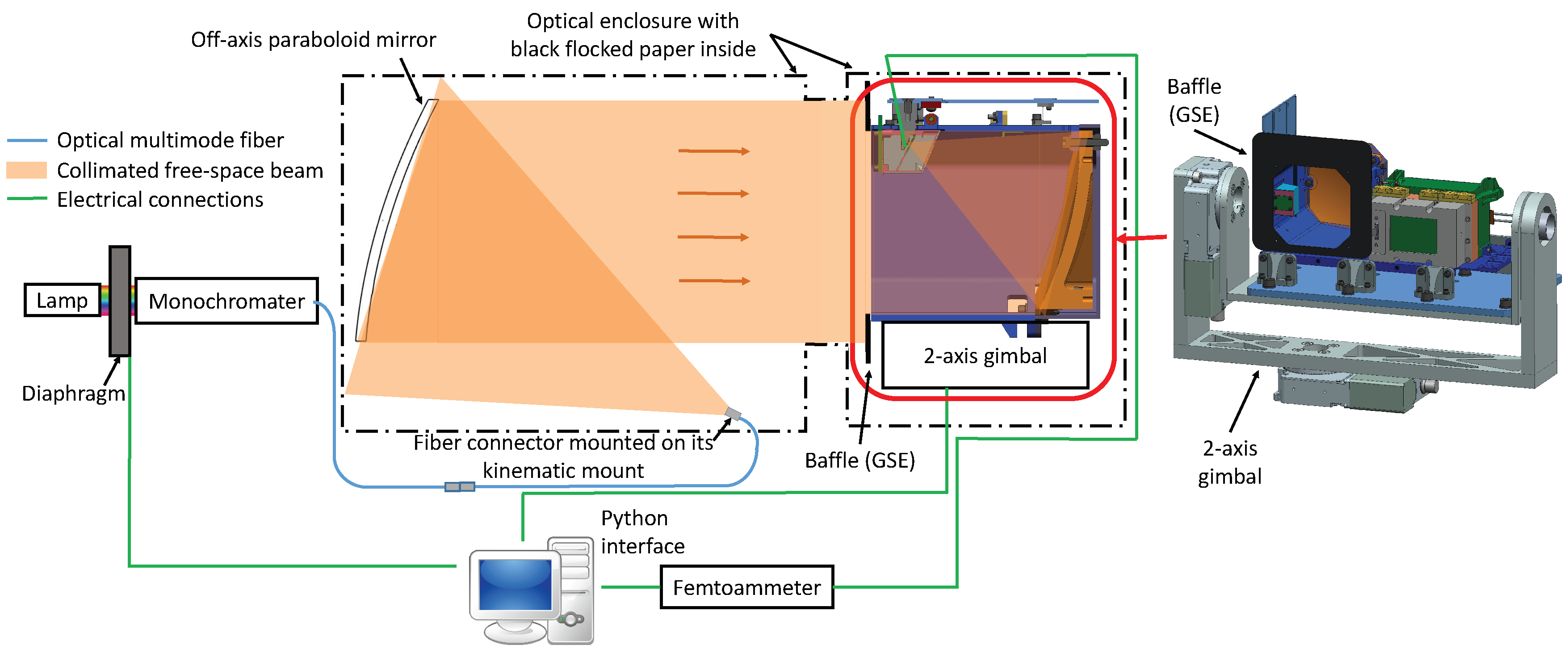
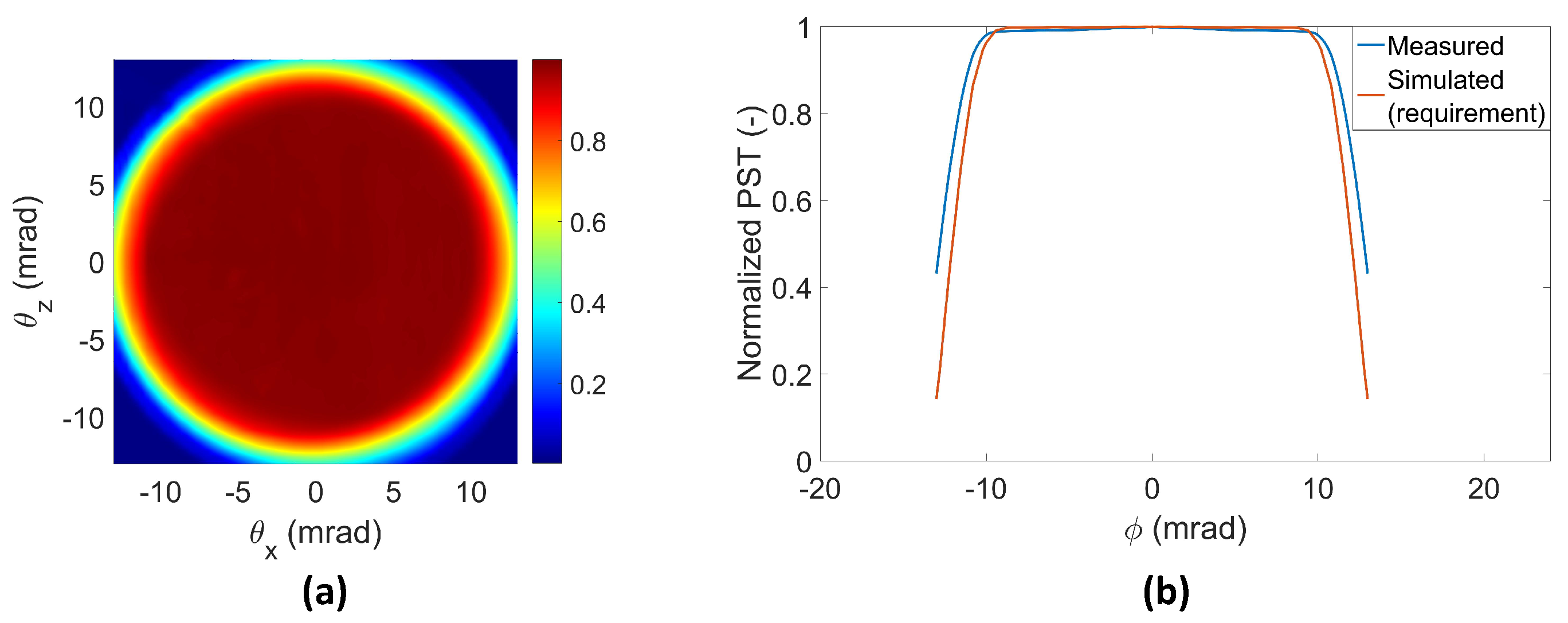
5.4. Charactarization of the Receiver Field of View
- The fiber has been aligned with the large GSE off-axis paraboloidal mirror with a precision that guarantees a beam divergence <0.35 mrad. Thus, the beam illuminating the receiver aperture during the receiver FOV characterization is not perfectly collimated, and the PST measurement within [–14, 14] mrad corresponds to the convolution of the beam divergence profile with the actual receiver FOV. Thus, there is a small artifact introduced in the measurements that leads to measuring a slightly larger FOV.
- Simulations assumed a perfect 2-mm diameter for the detector active area diameter, while in practice, there is an out-of-area (OOA) response: this is a contribution to the response from the area outside the 2-mm optical size if the detector is overfilled with illumination, due to the standard product design. In our case, the OOA is between 2.08 mm (inner diameter) and 2.125 mm (outer diameter) per detector mask design, with a responsivity within the OOA that can reach 90% of the responsivity in the central region of the active area.
6. Conclusions and Perspectives
- field of view (requirement: 20 mrad with <3.7% non-uniformity within 100% of the FOV and <1.3% non-uniformity within 95% of the FOV; measurement: 20 mrad with 2% non-uniformity within 100% of the FOV, and 1.3% non-uniformity within 95% of the FOV);
- responsivity (requirements: >0.47 A/W at 1064 nm, >0.89 A/W at 1495 nm, >1.05 A/W at 1850 nm, >1.04 A/W at 1990 nm; measurements: 0.51 A/W at 1064 nm, 1.06 A/W at 1495 nm, 1.36 A/W at 1850 nm, and 1.37 A/W at 1990 nm);
- receiver dark current (requirement: <2 nA; measurement: 0.38 nA with the femtoammeter ground support equipment providing a bias <1 mV).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Goddard, E.C. The Papers of Robert H. Goddard; Pendray, G.E., Ed.; McGraw-Hill: New York, NY, USA, 1970; Volume 1, pp. 1938–19845. [Google Scholar]
- Watson, K.; Murray, B.; Brown, H. On the possible presence of ice on the Moon. J. Geophys. Res. 1961, 66, 1598–1600. [Google Scholar] [CrossRef] [Green Version]
- Paige, D.A.; Siegler, M.A.; Zhang, J.A.; Hayne, P.O.; Foote, E.J.; Bennett, K.A.; Vasavada, A.R.; Greenhagen, B.T.; Schofield, J.T.; McCleese, D.J.; et al. Diviner lunar radiometer observations of cold traps in the Moon’s south polar region. Science 2010, 330, 479–482. [Google Scholar] [CrossRef] [PubMed]
- Hayne, P.O.; Hendrix, A.; Sefton-Nash, E.; Siegler, M.A.; Lucey, P.G.; Retherford, K.D.; Williams, J.P.; Greenhagen, B.T.; Paige, D.A. Evidence for exposed water ice in the Moon’s south polar regions from Lunar Reconnaissance Orbiter ultraviolet albedo and temperature measurements. Icarus 2015, 255, 58–69. [Google Scholar] [CrossRef]
- Hayne, P.O.; Paige, D.A.; Ingersoll, A.P.; Judd, M.A.; Aharonson, O.; Alkali, L.; Byrne, S.; Cohen, B.; Colaprete, A.; Combe, J.P.; et al. New Approaches to Lunar Ice Detection and Mapping: Study Overview and Results of the First Workshop. In Proceedings of the Annual Meeting of the Lunar Exploration Analysis Group, 14–16 October 2013; Volume 1748, p. 7043. [Google Scholar]
- The Lunar Exploration Analysis Group (LEAG); The Mars Exploration Program Analysis Group (MEPAG); The Small Bodies Assessment Group (SBAG) Strategic Knowledge Gaps (SKGs). Available online: https://www.nasa.gov/exploration/library/skg.html (accessed on 2 October 2018).
- Thomson, B.J.; Bussey, D.B.J.; Neish, C.D.; Cahill, J.T.S.; Heggy, E.; Kirk, R.L.; Patterson, G.W.; Raney, R.K.; Spudis, P.D.; Thompson, T.W.; et al. An upper limit for ice in Shackleton crater as revealed by LRO Mini-RF orbital radar. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef] [Green Version]
- Spudis, P.D.; Bussey, D.B.J.; Baloga, S.M.; Cahill, J.T.S.; Glaze, L.S.; Patterson, G.W.; Raney, R.K.; Thompson, T.W.; Thomson, B.J.; Ustinov, E.A. Evidence for water ice on the Moon: Results for anomalous polar craters from the LRO Mini-RF imaging radar. J. Geophys. Res. Planets 2013, 118, 2016–2029. [Google Scholar] [CrossRef] [Green Version]
- Nozette, S.; Lichtenberg, C.L.; Spudis, P.; Bonner, R.; Ort, W.; Malaret, E.; Robinson, M.; Shoemaker, E.M. The Clementine bistatic radar experiment. Science 2016, 274, 1495–1498. [Google Scholar] [CrossRef]
- Feldman, W.C.; Maurice, S.; Binder, A.B.; Barraclough, B.L.; Elphic, R.C.; Lawrence, D.J. Fluxes of fast and epithermal neutrons from Lunar Prospector: Evidence for water ice at the lunar poles. Science 1998, 281, 1496–1500. [Google Scholar] [CrossRef] [PubMed]
- Feldman, W.C.; Lawrence, D.J.; Elphic, R.C.; Barraclough, B.L.; Maurice, S.; Genetay, I.; Binder, A.B. Polar hydrogen deposits on the Moon. J. Geophys. Res. 2000, 105, 4175–4195. [Google Scholar] [CrossRef] [Green Version]
- Feldman, W.C.; Lawrence, D.J.; Little, R.C.; Lawson, S.L.; Gasnault, O.; Wiens, R.C.; Barraclough, B.L.; Elphic, R.C.; Prettyman, T.H.; Steinberg, J.T. Evidence for water ice near the lunar poles. J. Geophys. Res. 2001, 106, 23231–23251. [Google Scholar] [CrossRef] [Green Version]
- Mitrofanov, I.G.; Sanin, A.B.; Boynton, W.V.; Chin, G.; Garvin, J.B.; Golovin, D.; Evans, L.G.; Harshman, K.; Kozyrev, A.S.; Litvak, M.L.; et al. Hydrogen mapping of the lunar south pole using the LRO neutron detector experiment LEND. Science 2010, 330, 483–486. [Google Scholar] [CrossRef] [PubMed]
- Mitrofanov, I.; Litvak, M.; Sanin, A.; Malakhov, A.; Golovin, D.; Boynton, W.; Droege, G.; Chin, G.; Evans, L.; Harshman, K.; et al. Testing polar spots of water-rich permafrost on the Moon: LEND observations onboard LRO. J. Geophys. Res. Planets 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Boynton, W.V.; Droege, G.F.; Mitrofanov, I.G.; McClanahan, T.P.; Sanin, A.B.; Litvak, M.L.; Schaffner, M.; Chin, G.; Evans, L.G.; Garvin, J.B.; et al. High spatial resolution studies of epithermal neutron emission from the lunar poles: Constraints on hydrogen mobility. J. Geophys. Res. Planets 2012, 117. [Google Scholar] [CrossRef]
- Livengood, T.A.; Chin, G.; Sagdeev, R.Z.; Mitrofanov, I.G.; Boynton, W.V.; Evans, L.G.; Litvak, M.L.; McClanahan, T.P.; Sanin, A.B.; Starr, R.D. Evidence for Diurnally Varying Hydration at the Moon’s Equator from the Lunar Exploration Neutron Detector (LEND). In Proceedings of the 45th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 17–21 March 2014; p. 1507. [Google Scholar]
- Schwadron, N.A.; Wilson, J.K.; Looper, M.D.; Jordan, A.P.; Spence, H.E.; Blake, J.B.; Case, A.W.; Iwata, Y.; Kasper, J.C.; Farrell, W.M.; et al. Signatures of volatiles in the lunar proton albedo. Icarus 2016, 273, 25–35. [Google Scholar] [CrossRef]
- Gladstone, G.R.; Retherford, K.D.; Egan, A.F.; Kaufmann, D.E.; Miles, P.F.; Parker, J.W.; Horvath, D.; Rojas, P.M.; Versteeg, M.H.; Davis, M.W.; et al. Far-ultraviolet reflectance properties of the Moon’s permanently shadowed regions. J. Geophys. Res. Planets 2012, 117. [Google Scholar] [CrossRef]
- Hendrix, A.R.; Retherford, K.D.; Randall Gladstone, G.; Hurley, D.M.; Feldman, P.D.; Egan, A.F.; Kaufmann, D.E.; Miles, P.F.; Parker, J.W.; Horvath, D.; et al. The lunar far-UV albedo: Indicator of hydration and weathering. J. Geophys. Res. Planets 2012, 117. [Google Scholar] [CrossRef] [Green Version]
- Colaprete, A.; Schultz, P.; Heldmann, J.; Wooden, D.; Shirley, M.; Ennico, K.; Hermalyn, B.; Marshall, W.; Ricco, A.; Elphic, R.C.; et al. Detection of water in the LCROSS ejecta plume. Science 2012, 330, 463–468. [Google Scholar] [CrossRef] [PubMed]
- Heldmann, J.L.; Lamb, J.; Asturias, D.; Colaprete, A.; Goldstein, D.B.; Trafton, L.M.; Varghese, P.L. Evolution of the dust and water ice plume components as observed by the LCROSS visible camera and UV-visible spectrometer. Icarus 2015, 254, 262–275. [Google Scholar] [CrossRef]
- Pieters, C.M.; Goswami, J.N.; Clark, R.N.; Annadurai, M.; Boardman, J.; Buratti, B.; Combe, J.P.; Dyar, M.D.; Green, R.; Head, J.W.; et al. Character and spatial distribution of OH/H2O on the surface of the Moon seen by M3 on Chandrayaan-1. Science 2009, 326, 568–572. [Google Scholar] [CrossRef]
- Sunshine, J.M.; Farnham, T.L.; Feaga, L.M.; Groussin, O.; Merlin, F.; Milliken, R.E.; A’Hearn, M.F. Temporal and spatial variability of lunar hydration as observed by the Deep Impact spacecraft. Science 2009, 326, 565–568. [Google Scholar] [CrossRef]
- Clark, R.N. Detection of adsorbed water and hydroxyl on the Moon. Science 2009, 326, 562–564. [Google Scholar] [CrossRef]
- Zuber, M.T.; Head, J.W.; Smith, D.E.; Neumann, G.A.; Mazarico, E.; Torrence, M.H.; Aharonson, O.; Tye, A.R.; Fassett, C.I.; Rosenburg, M.A.; et al. Constraints on the volatile distribution within Shackleton crater at the lunar south pole. Nature 2012, 486, 378–381. [Google Scholar] [CrossRef] [Green Version]
- Lucey, P.G.; Neumann, G.A.; Paige, D.A.; Riner, M.A.; Mazarico, E.M.; Smith, D.E.; Zuber, M.T.; Siegler, M.; Hayne, P.O.; Bussey, D.B.J.; et al. Evidence for Water Ice and Temperature Dependent Space Weathering at the Lunar Poles from Lola and diviners. In Proceedings of the 45th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 17–21 March 2014; p. 2325. [Google Scholar]
- Li, S.; Lucey, P.G.; Milliken, R.E.; Hayne, P.O.; Fisher, E.; Williams, J.P.; Hurley, D.M.; Elphic, R.C. Direct evidence of surface exposed water ice in the lunar polar regions. Proc. Natl. Acad. Sci. USA 2018, 115. [Google Scholar] [CrossRef]
- Hayne, P.O.; Cohen, B.A.; Sellar, R.G.; Staehle, R.; Toomarian, N.; Paige, D.A. Lunar flashlight: Mapping lunar surface volatiles using a cubesat. In Proceedings of the Annual Meeting of the Lunar Exploration Analysis Group, Laurel, MD, USA, 14–16 October 2013; p. 7045. [Google Scholar]
- Fisher, E.A.; Lucey, P.G.; Lemelin, M.; Greenhagen, B.T.; Siegler, M.A.; Mazarico, E.; Aharonson, O.; Williams, J.P.; Hayne, P.O.; Neumann, G.A.; et al. Evidence for surface water ice in the lunar polar regions using reflectance measurements from the Lunar Orbiter Laser Altimeter and temperature measurements from the Diviner Lunar Radiometer Experiment. Icarus 2017, 292, 74–85. [Google Scholar] [CrossRef]
- Smith, D.E.; Zuber, M.T.; Neumann, G.A.; Lemoine, F.G.; Mazarico, E.; Torrence, M.H.; McGarry, J.F.; Rowlands, D.D.; Head, J.W.; Duxbury, T.H.; et al. Initial observations from the lunar orbiter laser altimeter (LOLA). Geophys. Res. Lett. 2010, 37. [Google Scholar] [CrossRef]
- Riris, H.; Cavanaugh, J.; Sun, X.; Liiva, P.; Rodriguez, M.; Neuman, G. The lunar orbiter laser altimeter (LOLA) on NASA’s lunar reconnaissance orbiter (LRO) mission. In Proceedings of the International Conference on Space Optics, Rhodes Island, Greece, 4–8 October 2010. [Google Scholar]
- Ramos-Izquierdo, L.; Scott, V.S., III; Connelly, J.; Schmidt, S.; Mamakos, W.; Guzek, J.; Peters, C.; Liiva, P.; Rodriguez, M.; Cavanaugh, J.; et al. Optical system design and integration of the Lunar Orbiter Laser Altimeter. Appl. Opt. 2009, 48, 3035–3049. [Google Scholar] [CrossRef] [PubMed]
- Cohen, B.A.; Hayne, P.O.; Greenhagen, B.T.; Paige, D.A.; Camacho, J.M.; Crabtree, K.; Paine, C.G.; Sellar, R.G. Payload Design for the Lunar Flashlight Mission. In Proceedings of the 48th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 20–24 March 2017; p. 1709. [Google Scholar]
- Wehmeier, U.; Vinckier, Q.; Sellar, R.G.; Paine, C.G.; Hayne, P.O.; Bagheri, M.; Rais-Zadeh, M.; Forouhar, S.; Loveland, J.; Shelton, J. The Lunar Flashlight CubeSat instrument: A compact SWIR laser reflectometer to quantify and map water ice on the surface of the Moon. In Proceedings of the SPIE Optical Engineering + Application conference—CubeSats and NanoSats for Remote Sensing II, San Diego, CA, USA, 21–22 August 2018; Volume 10769, p. 107690H. [Google Scholar]
- Lucey, P.G.; Sun, X.; Abshire, J.B.; Neumann, G.A. An orbital lidar spectrometer for lunar polar compositions. In Proceedings of the 45th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 17–21 March 2014; p. 2335. [Google Scholar]
- Robinson, K.F.; Norris, G. NASA’s Space Launch System: Deep-Space Delivery for Smallsats. In Proceedings of the Annual AIAA Space and Astronautics Forum and Exposition, Orlando, FL, USA, 12–14 September 2017; p. M17-6183. [Google Scholar]
- Clark, P.E.; Malphrus, B.; Brown, K.; Hurford, T.; Brambora, C.; MacDowall, R.; Folta, D.; Tsay, M.; Brandon, C.; Team, L.I.C. Lunar Ice Cube: Searching for Lunar Volatiles with a lunar cubesat orbiter. In Proceedings of the 48th Meeting of the Division for Planetary Sciences, Pasadena, CA, USA, 16–21 October 2016. [Google Scholar]
- Hardgrove, C.; Bell, J.; Thangavelautham, J.; Klesh, A.; Starr, R.; Colaprete, T.; Robinson, M.; Drake, D.; Johnson, E.; Christian, J.; et al. The Lunar Polar Hydrogen Mapper (LunaH-Map) mission: Mapping hydrogen distributions in permanently shadowed regions of the Moon’s south pole. In Proceedings of the Annual Meeting of the Lunar Exploration Analysis Group, Columbia, MD, USA, 20–22 October 2015; Volume 1863, p. 2035. [Google Scholar]
- Lunar Flashlight Propulsion System. Available online: https://www.cubesat-propulsion.com/wp-content/uploads/2017/08/X16029000-01-data-sheet-080217.pdf (accessed on 3 October 2018).
- Kobayashi, M. Iris Deep-Space Transponder for SLS EM-1 CubeSat Missions. In Proceedings of the AIAA/USU Conference on Small Satellites, Logan, UT, USA, 5–10 August 2017; p. SSC17-II-04. [Google Scholar]
- Vinckier, Q.; Crabtree, K.; Gibson, M.; Smith, C.; Wehmeier, U.; Hayne, P.O.; Sellar, R.G. Optical and mechanical designs of the multi-band SWIR receiver for the Lunar Flashlight CubeSat mission. In Proceedings of the SPIE Optical Systems Design conference—Optical Design and Engineering VII, Frankfurt, Germany, 5 June 2018; Volume 10690, p. 106901I. [Google Scholar]
- Vinckier, Q.; Hayne, P.O.; Martinez-Camacho, J.M.; Paine, C.; Cohen, B.A.; Wehmeier, U.J.; Sellar, R.G. System Performance Modeling of the Lunar Flashlight CubeSat Instrument. In Proceedings of the 49th Lunar and Planetary Science Conference, The Woodlands, TX, USA, 19–23 March 2018; p. 1030. [Google Scholar]
- Hapke, B. Bidirectional reflectance spectroscopy: 1. Theory. J. Geophys. Res. Solid Earth 1981, 86, 3039–3054. [Google Scholar] [CrossRef]
- Warren, S.G.; Richard, E.B. Optical constants of ice from the ultraviolet to the microwave: A revised compilation. J. Geophys. Res. Atmos. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- NASA Jet Propulsion Laboratory—California Institute of Technology: Lunar Flashlight CubeSat Mission. Available online: https://www.jpl.nasa.gov/cubesat/missions/lunar_flashlight.php (accessed on 5 November 2018).
- Harvey, J. Light Scattering Characteristics of Optical Surfaces. Ph.D. Thesis, University of Arizona, Tucson, AZ, USA, 1976. [Google Scholar]
- Military Standard 1246C. Product Cleanliness Levels and Contamination Control Program. In Technical Report; Department of Defense: Washington, DC, USA, 1994. [Google Scholar]
- Harvey, J.E.; Choi, N.; Schroeder, S.; Duparré, A. Total integrated scatter from surfaces with arbitrary roughness, correlation widths, and incident angles. Opt. Eng. 2012, 51, 013402. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver dimensions | ~80 × 80 × 95 mm 1 |
| Receiver aperture | ~75 × 75 mm 1 |
| Mirror surface requirements |
|
| Science detector |
|
| Temperature sensors |
|
| Responsivity requirements |
|
| Dark current requirement | <2 nA (detector dark current at a detector temperature of 208 K and detected thermal emission from the receiver at a temperature of 248 K for the mirror) |
| Field of view requirement | 20 mrad with <3.7% non-uniformity within 100% of the FOV and <1.3% non-uniformity within 95% of the FOV |
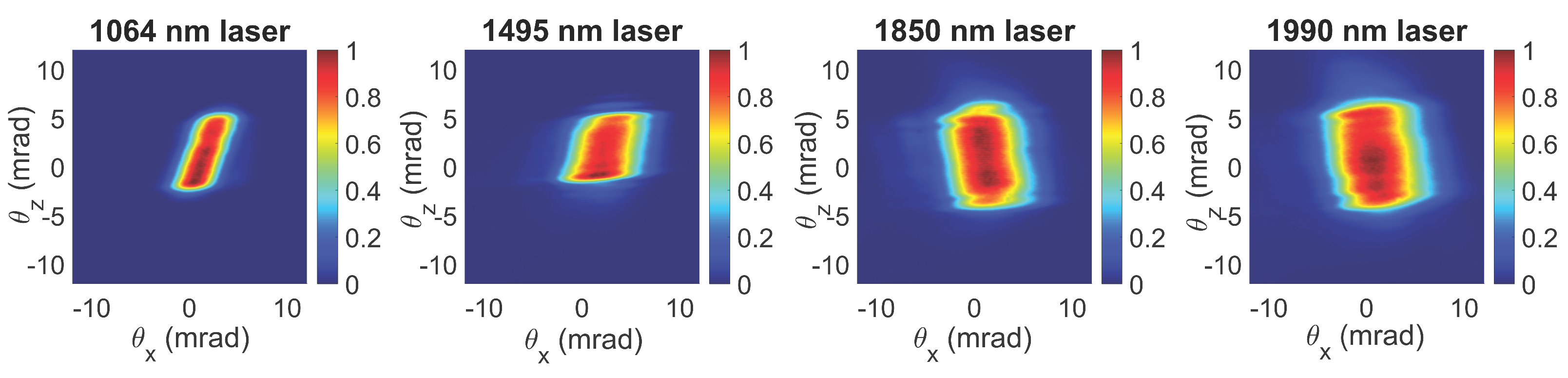
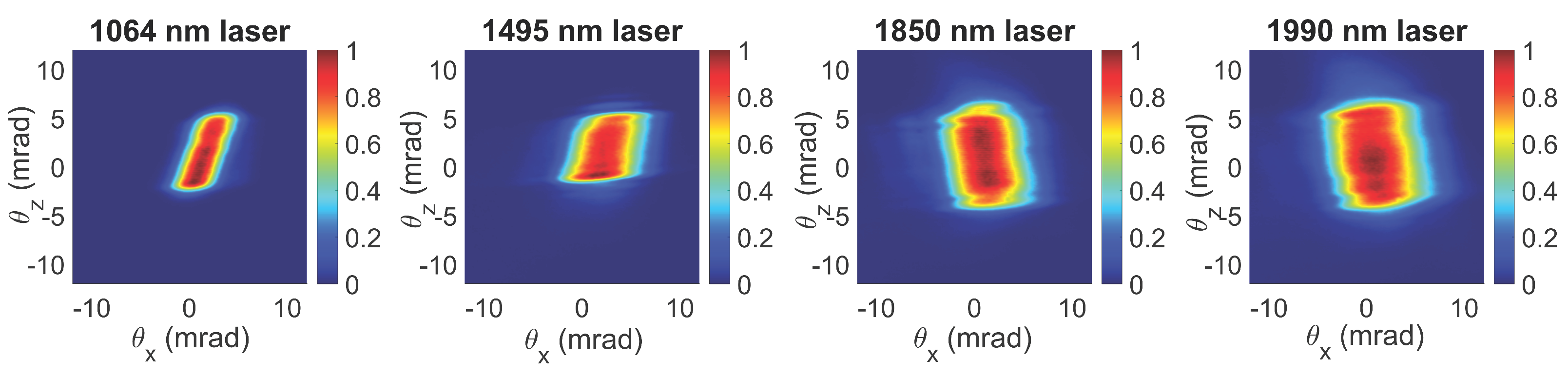
| Boresight alignment requirement | <1 mrad (this corresponds to a maximum laser signal loss <0.35% based on the measured laser divergence profiles depicted in Figure 6, which is insignificant) |
| Wavelength (nm) | Responsivity measurement (A/W) 1 | Responsivity requirement (A/W) |
|---|---|---|
| 1064 | 0.51 | >0.47 |
| 1495 | 1.06 | >0.89 |
| 1850 | 1.36 | >1.05 |
| 1990 | 1.37 | >1.04 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vinckier, Q.; Hardy, L.; Gibson, M.; Smith, C.; Putman, P.; Hayne, P.O.; Sellar, R.G. Design and Characterization of the Multi-Band SWIR Receiver for the Lunar Flashlight CubeSat Mission. Remote Sens. 2019, 11, 440. https://doi.org/10.3390/rs11040440
Vinckier Q, Hardy L, Gibson M, Smith C, Putman P, Hayne PO, Sellar RG. Design and Characterization of the Multi-Band SWIR Receiver for the Lunar Flashlight CubeSat Mission. Remote Sensing. 2019; 11(4):440. https://doi.org/10.3390/rs11040440
Chicago/Turabian StyleVinckier, Quentin, Luke Hardy, Megan Gibson, Christopher Smith, Philip Putman, Paul O. Hayne, and R. Glenn Sellar. 2019. "Design and Characterization of the Multi-Band SWIR Receiver for the Lunar Flashlight CubeSat Mission" Remote Sensing 11, no. 4: 440. https://doi.org/10.3390/rs11040440