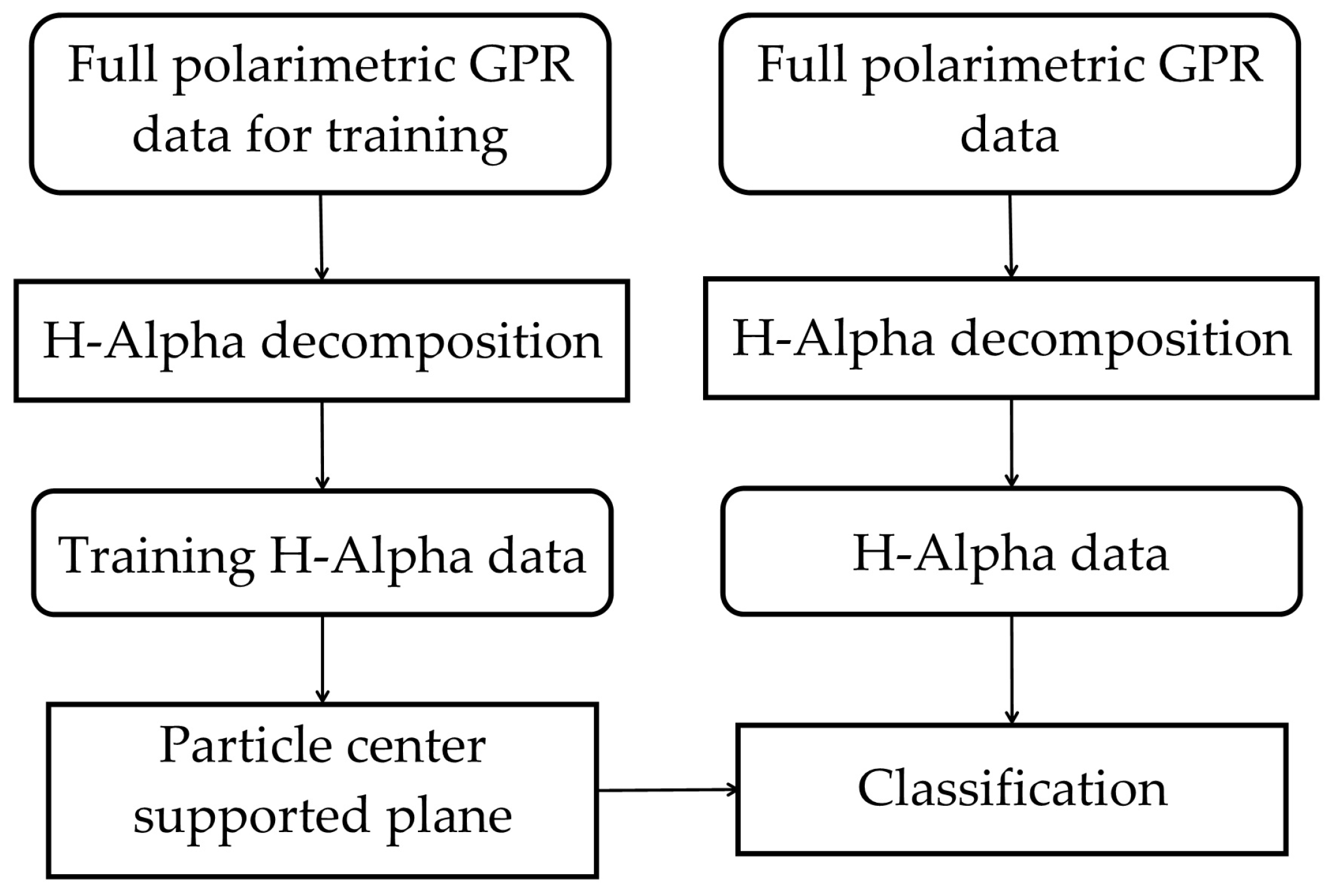
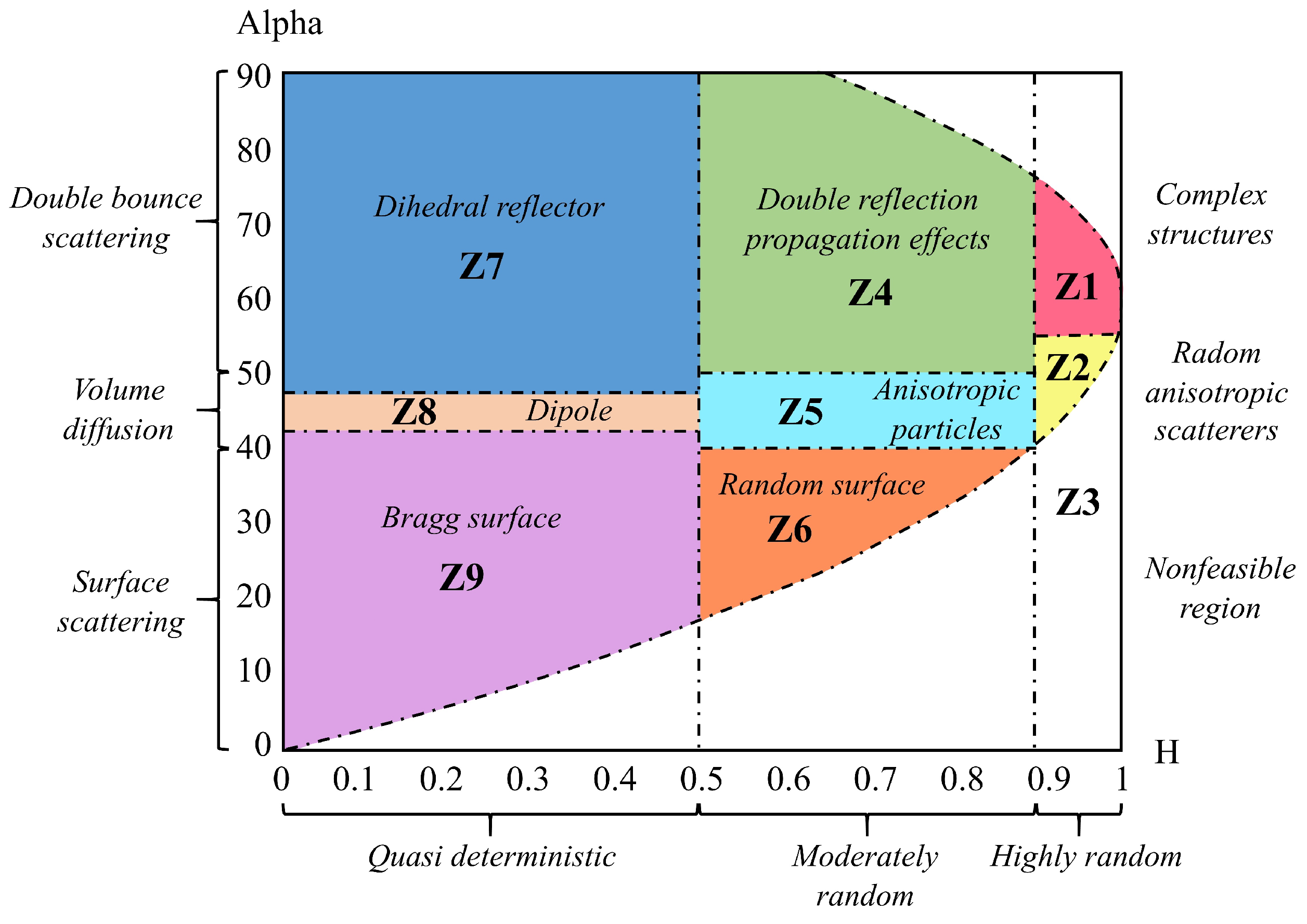
2.1. H-Alpha Decomposition
In full polarimetric GPR, the Sinclair matrix [
S] is applied to describe the nature of target scattering. The [
S] matrix [
13] can be represented as follows:
where
SXY represents the GPR data that is collected with an
X type polarimetric receiving antenna and
Y type polarimetric transmitting antenna,
H represents horizontal polarimetric antenna,
V represents vertical polarimetric antenna. According to the reciprocity theorem,
SHV is equal to
SVH.
The scattering vector
ks is defined as follows [
4]:
Coherency matrix [
T] and its parameterization [
4] is shown as (3), where
λ1,
λ2,
λ3, represent eigenvalues, and [
U3] is composed with eigenvectors [
4], [
U3] is shown as (4):
where
e1 e2 e3 are the eigenvectors. The parameterization of a 3 × 3 unitary [
U3] matrix in terms of column vectors with different parameters
α,
β,
δ and
γ, which are the parameters of the dominant scattering mechanism, is made so as to enable a probabilistic interpretation of the scattering process.
Finally, the mean scattering angle
α and entropy
H [
4] can be calculated as follows:
where
p1,
p2,
p3 are the false probabilities [
4] calculated as follows:
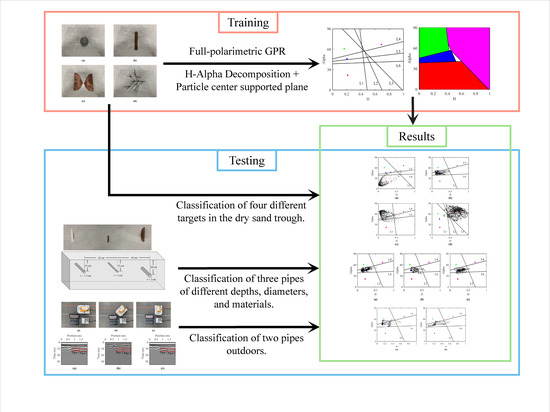
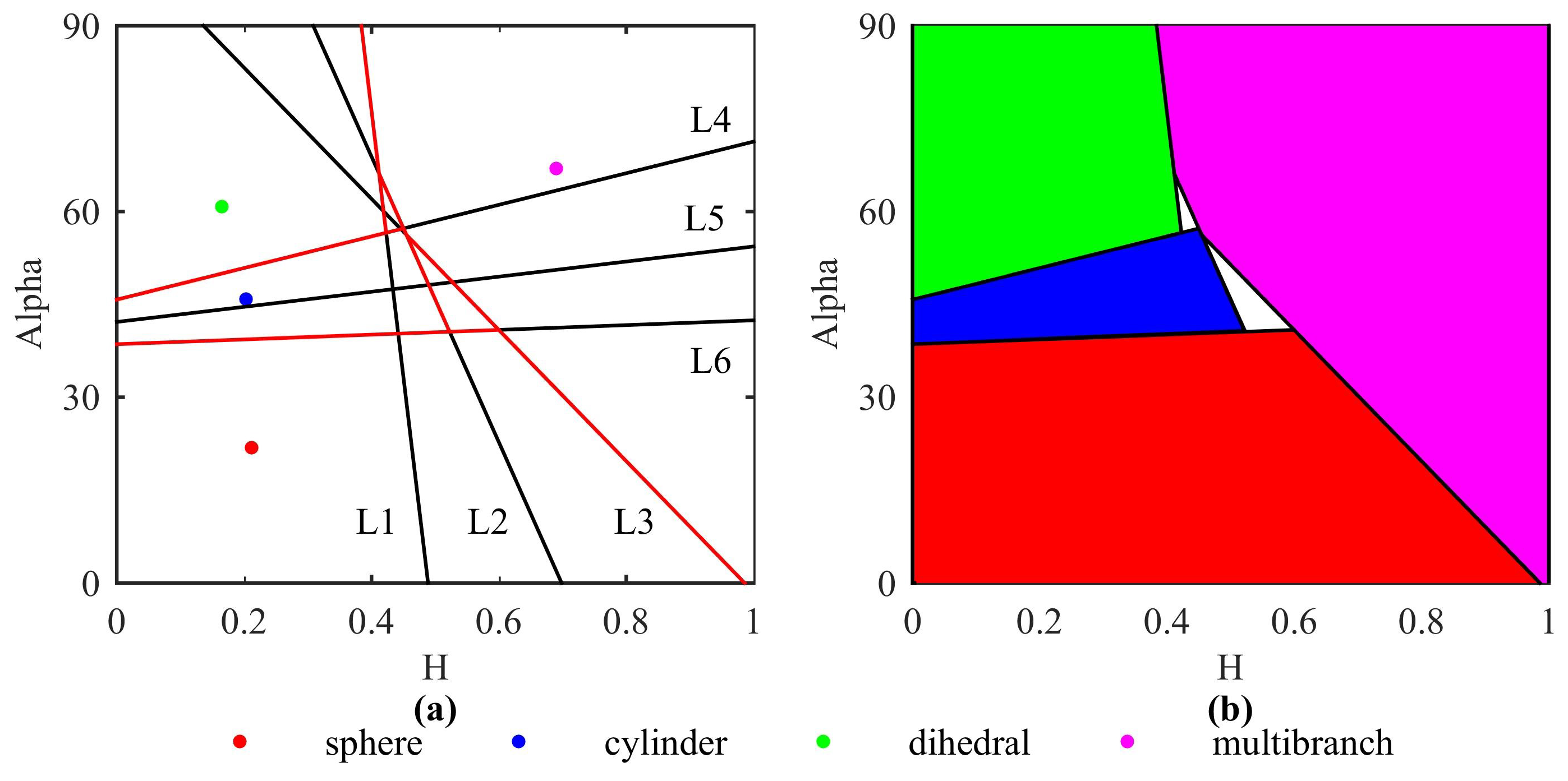
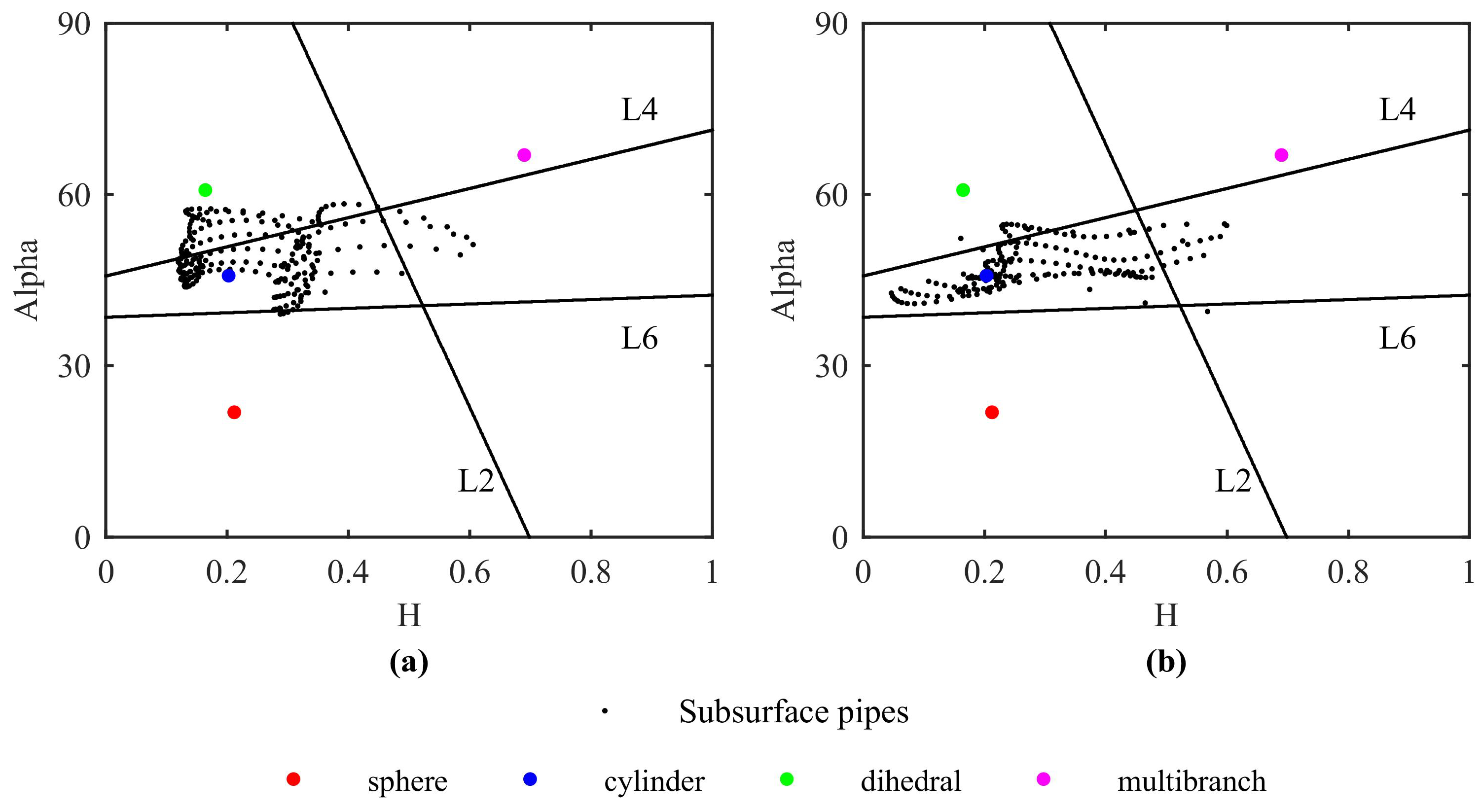
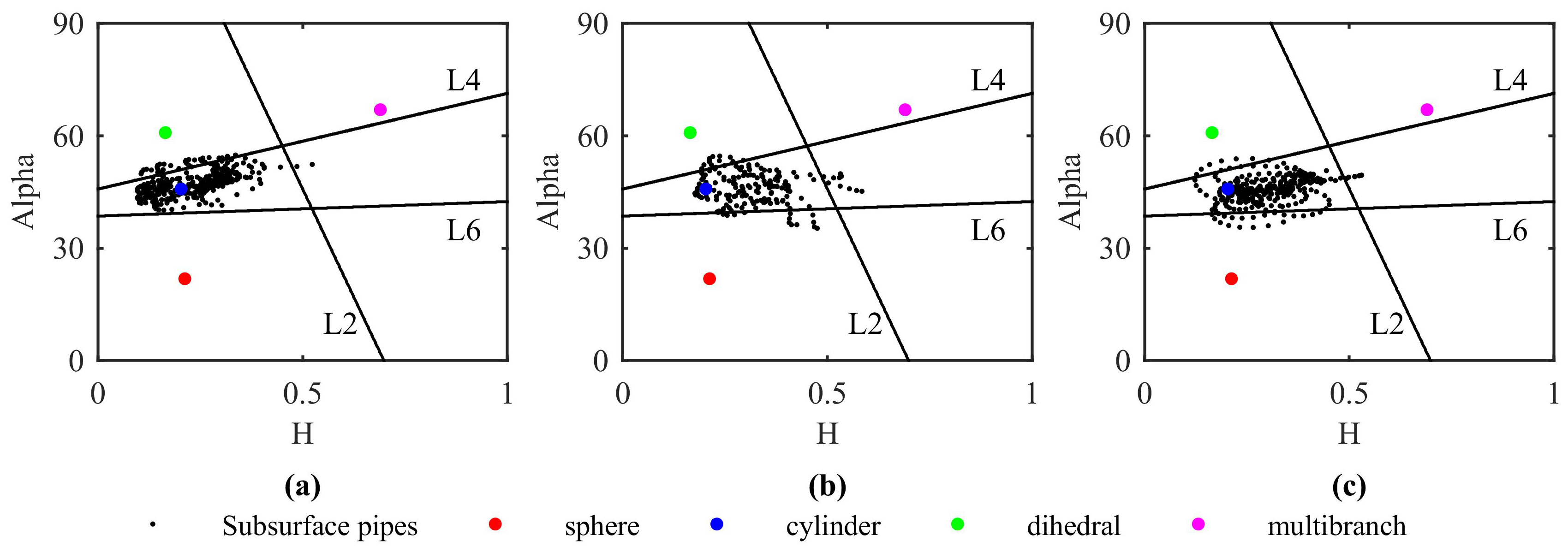
Herein, H and α are the parameters used to perform the classification.
2.2. Particle Center Supported Plane
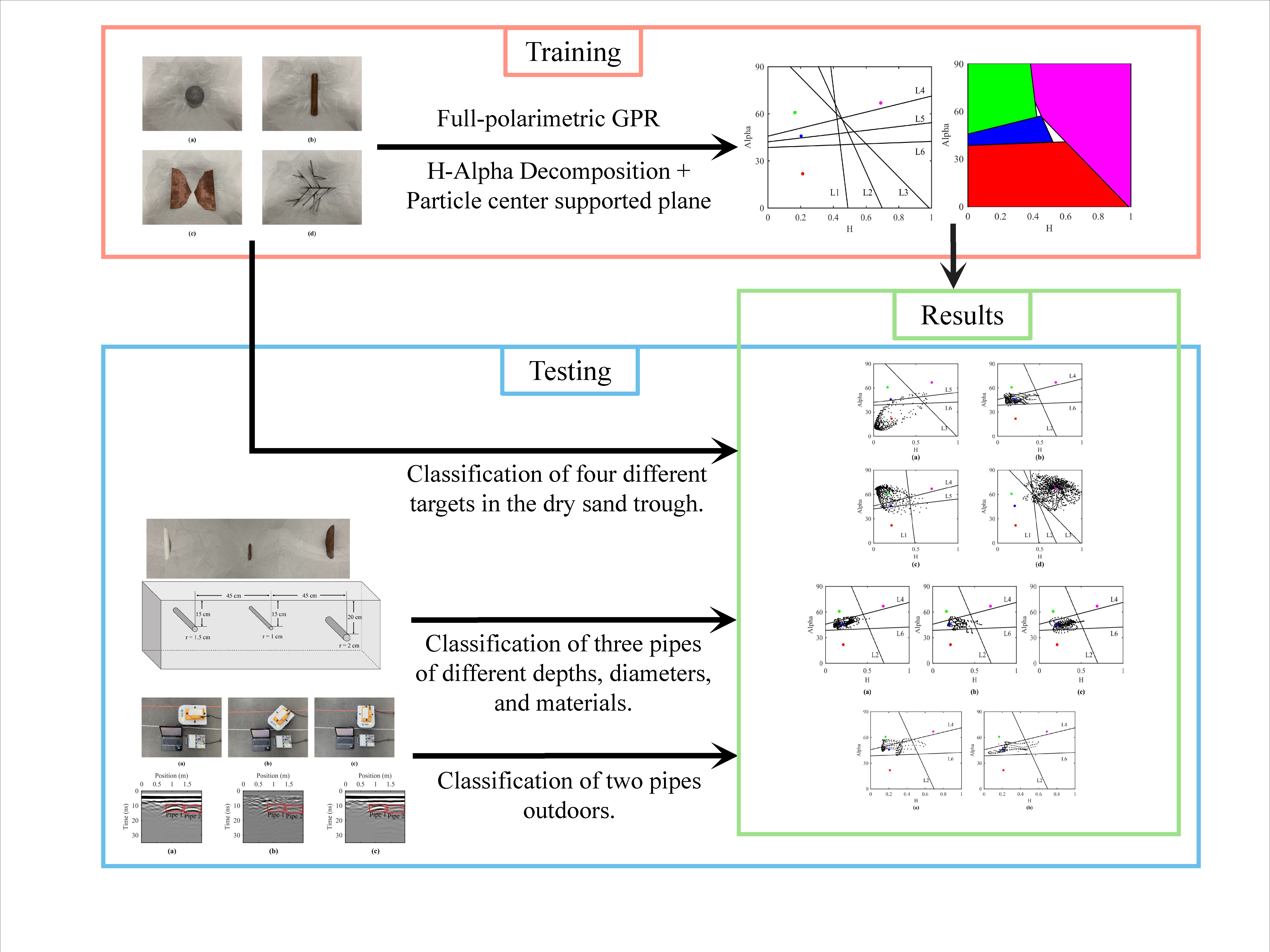
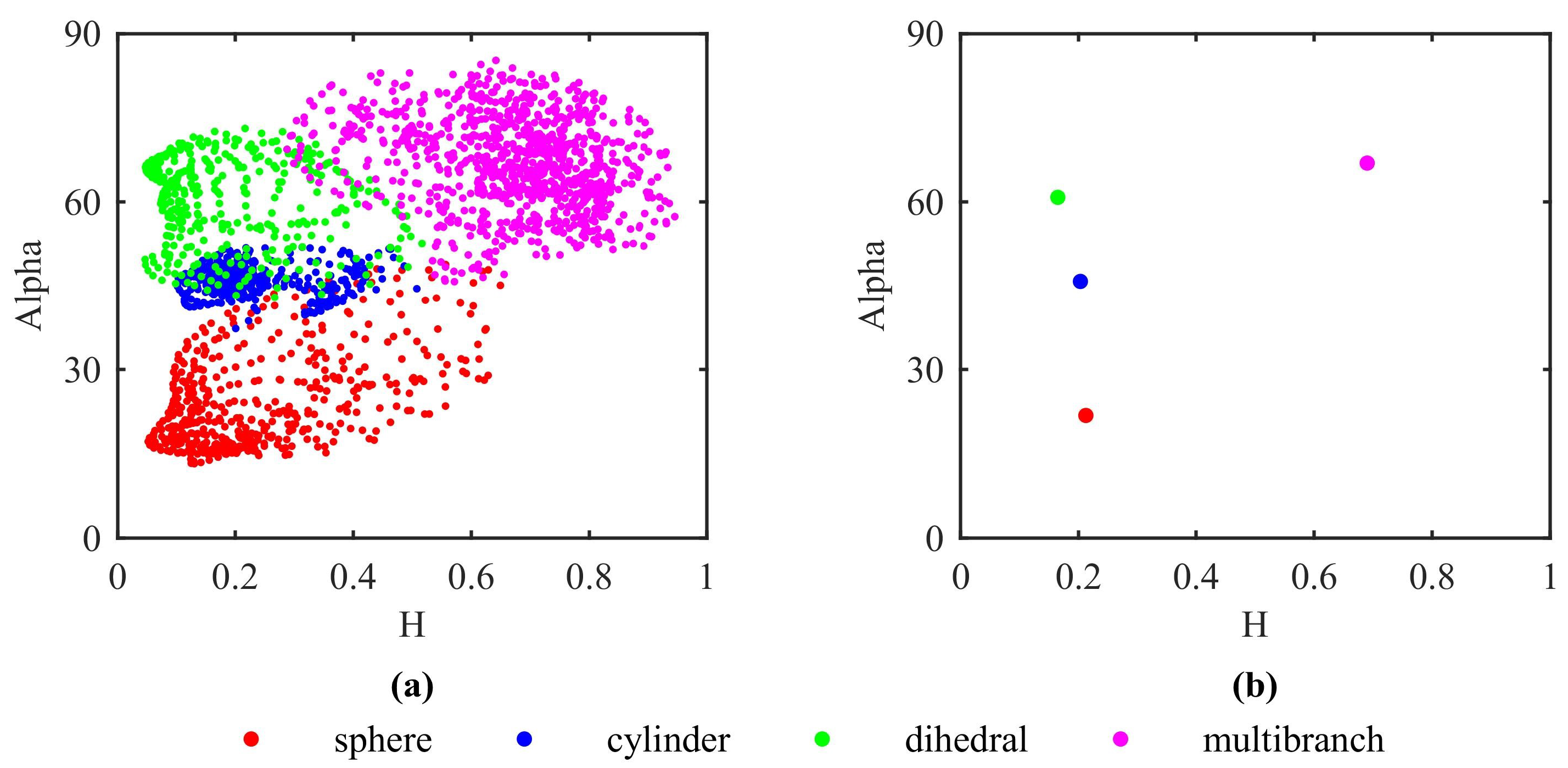
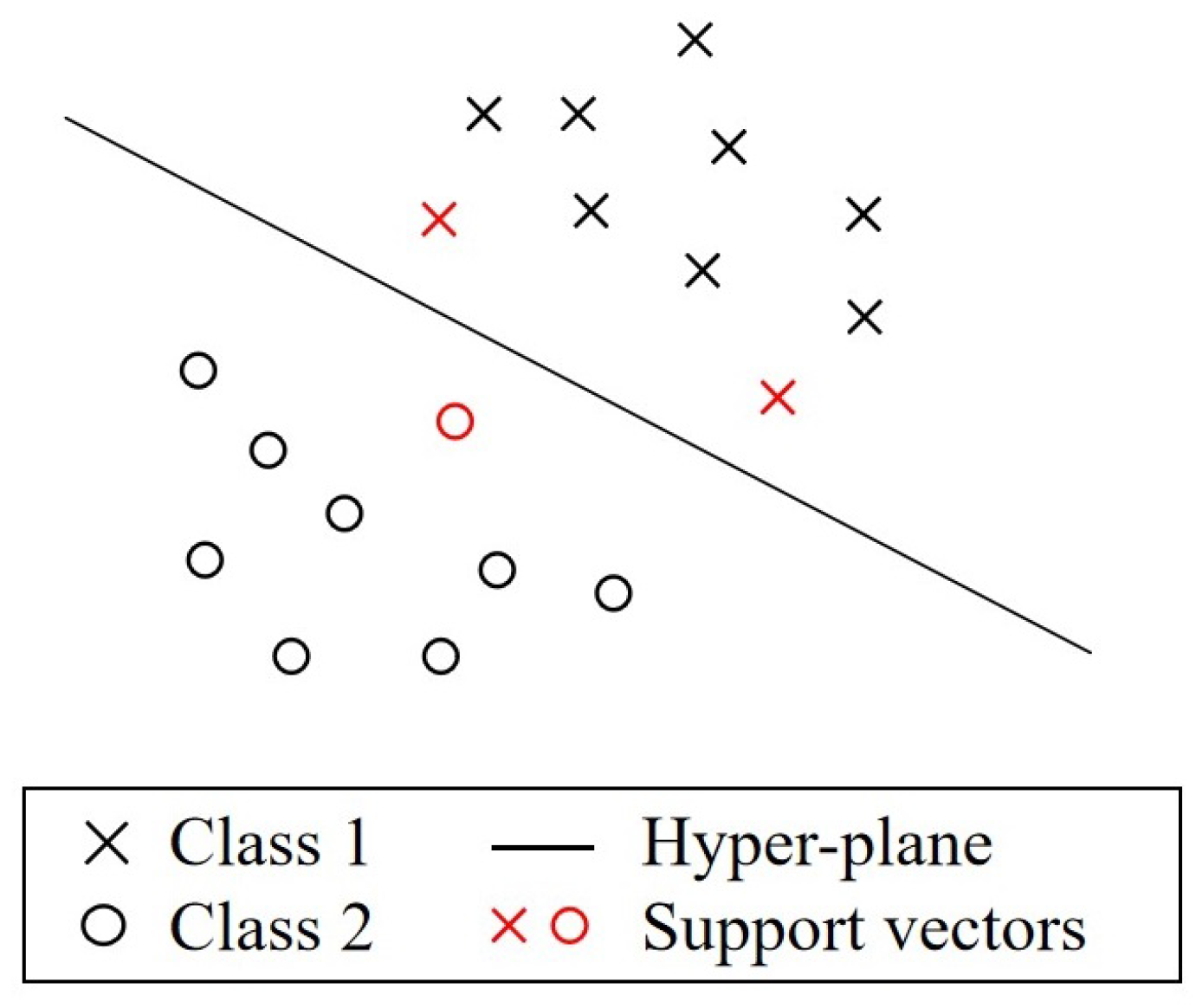
We define the sample center as the point with the smallest sum of distances from all points in the same sample. Typically, some outliers will be present in the sample. These outliers will affect the training result of the classification significantly (
Figure 1a), but the effect on the sample center is small. For example, in the quadrilateral ABCD of
Figure 1b, the diagonal intersection O is the point with the smallest sum of distances from four points A, B, C, D; therefore, point O is the sample center of points A, B, C, D. However, wherever the outlier C is at the extension line of AC, the sample center O will never change. Therefore, the sample center is considered a better representation of the sample without the significant effects of the outliers.
In this research, we propose a new machine learning method based on sample centers, i.e., particle center supported plane (PCSP), to perform the classification. The sample centers are obtained by particle swarm optimization (PSO). For PSO, particles are used to represent the random solutions of the optimization problem. The coordinate and velocity of
mth particle at
kth iteration can be represented as follows [
22]:
where
M represents the number of particles, and
k is the time of iteration,
and
correspond to
H and
α coordinates, respectively. The initial position
and initial velocity
are random.
In this problem, the sample contains
H and
α, therefore, the training sample can be represented as follows:
where
ztni represents the nth training sample point in ith type;
t represents “
training”;
Ni is the number of sample points in
ztni;
P represents the number of types.
We want the sum of the distances between the particles and all the points in the same sample to be minimum. Therefore, the objective function (fitness function) is defined as follows:
From the first iteration to the
kth iteration, the minimum value of the fitness function for
mth particle is known as the local optimal solution of
mth particle at
kth iteration, i.e.,
,
m = 1,2,…,
M; the minimum value of the fitness function for all the particles is known as the global optimal solution at
kth iteration, i.e.,
[
22].
For all particles, we use the formulas below to renew their positions and velocities [
22]:
where
k represents the time of iteration;
ω is the inertia weight;
r1,
r2 are the random numbers between 0 to 1;
c1,
c2 are the learning factors. In fact, for the right part of Equation (11), the first item represents the impact of the current position, the second item represents the impact of the current optimal position of this one particle, and the third item represents the influence of current optimal position of all particles. When the fitness function becomes minimum, the particles are at the center of the sample, the coordinate of sample center is
Bg, subsequently, we can obtain the sample centers of all types of samples:
where
P represents the number of classes.
After the sample centers of different samples are achieved from PSO, a classification law can be constructed based on these sample centers.
Figure 1a indicates that the outliers can affect the slope of the classification boundary significantly. In this method, straight lines are used as the classification boundary, and the slope of every line is determined by the sample centers. Subsequently, the intercepts are calculated by the classification accuracy for training samples.
For all the training samples {
ztn1,
ztn2,…,
ztnP} and their sample centers {
Bg1,
Bg2,…,
BgP}, where
P is the number of classes, we use {
ztni,
ztnj} and their sample centers {
Bgi,
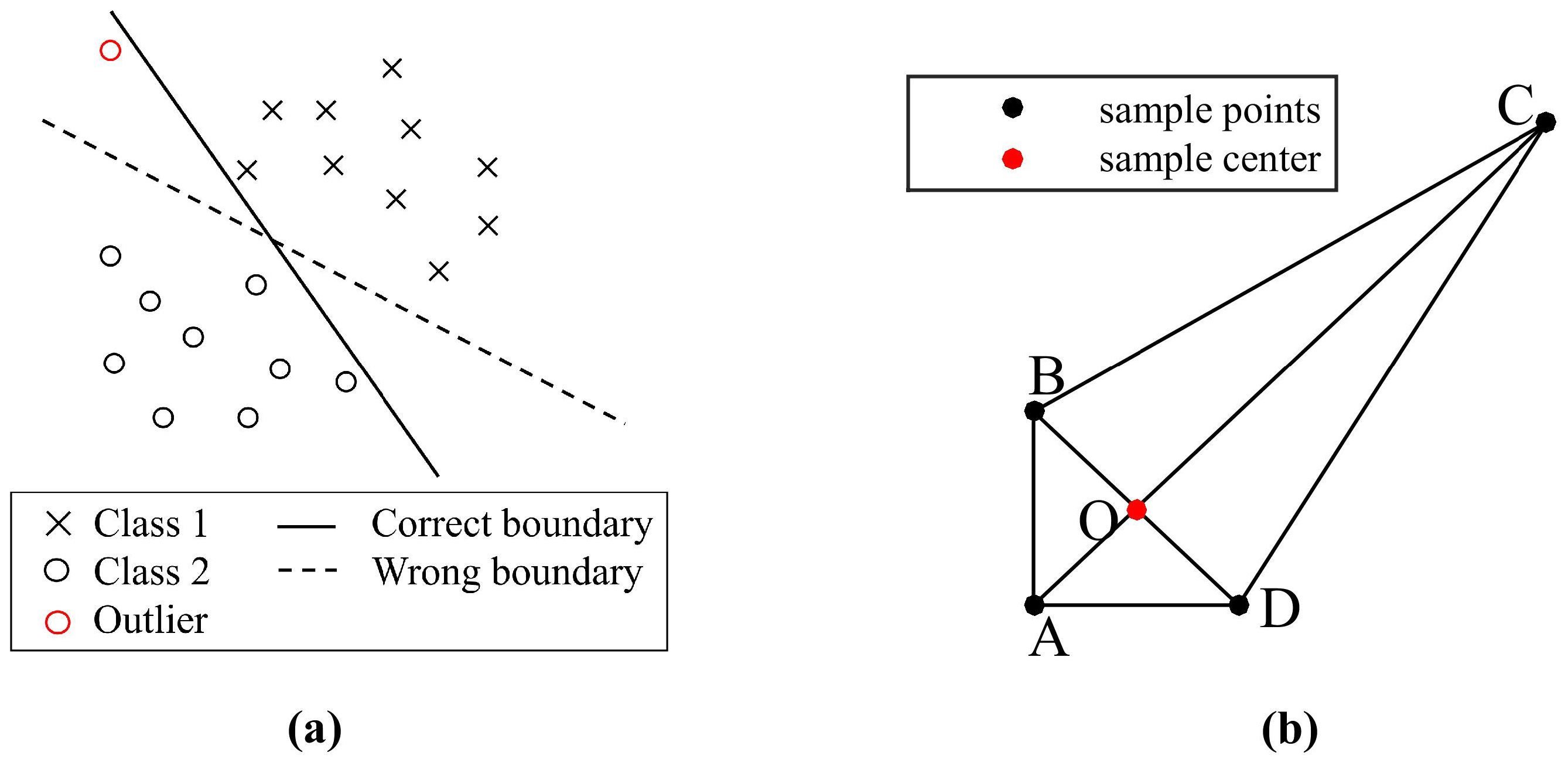
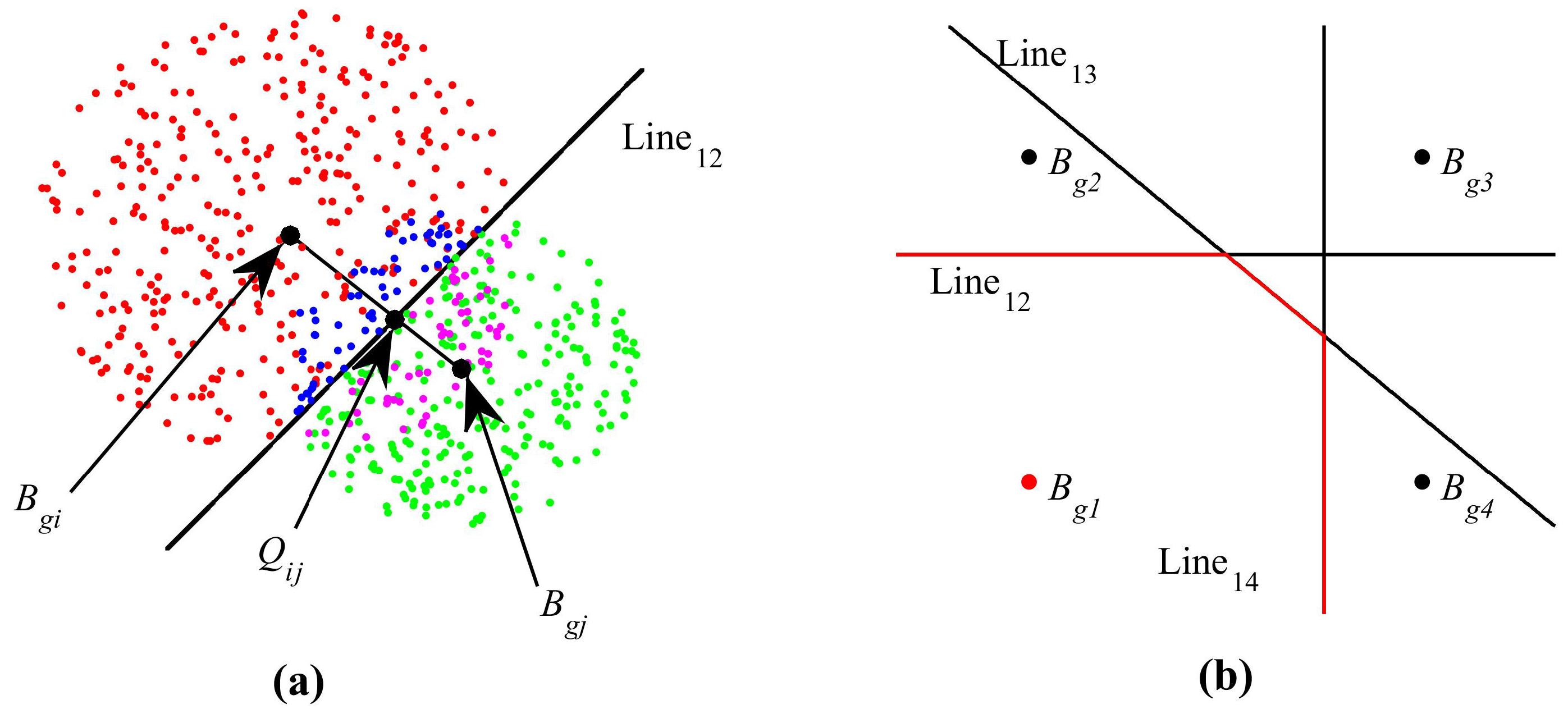
Bgj} as examples. In
Figure 2a, red points and purple points belong to the
ith type, green points and blue points belong to the
jth type. A critical point
Qij between two sample centers is calculated based on the classification accuracy of the boundary
Lineij. The
Lineij is through the critical point
Qij and is perpendicular to the connection line of
Bgi and
Bgj; the equation of
Lineij is as follows:
where
z = (
H,
α) is the point on the flat.
The points that are on the same side of
Lineij with
Bgi are considered to belong to the
ith type. The accuracy of
Lineij for classifying
ith type and
jth type are as follows, respectively:
where
Ni ((
ztni −
Qij)∙(
Bgi −
Qij) > 0) represents the number of points in the
ith sample which is on the same side of
Lineij with
Bgi. Subsequently, the points in the
ith sample that are far away from the sample center
Bgi are considered as outliers; therefore,
Accuracyi and
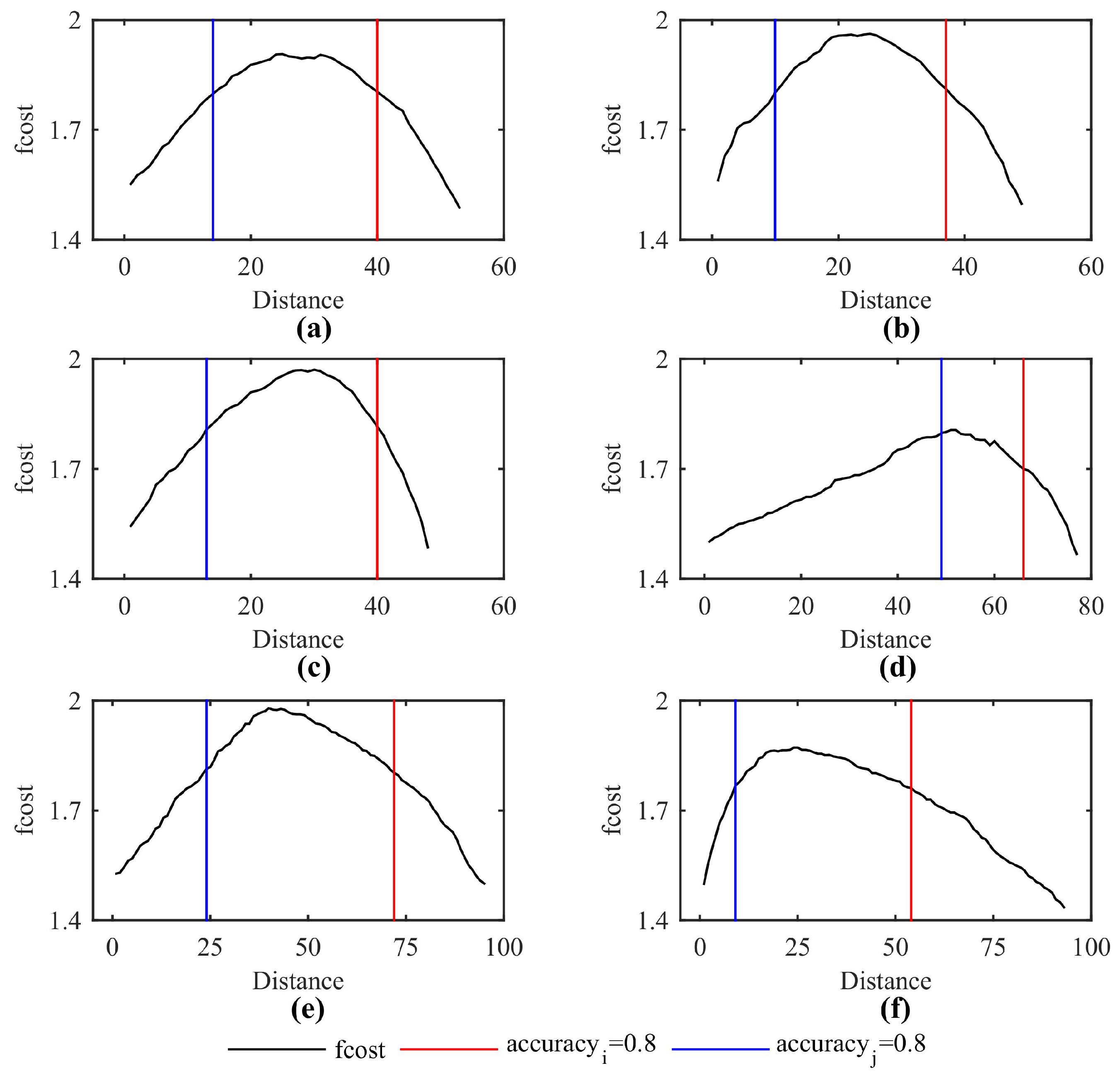
Accuracyj do not have to be 1. We chose
Accuracyi,j = 0.8 as the threshold. The objective function is defined as follows:
Subsequently, the optimal Qij as well as the particle center supported plane Lineij can be determined by solving the maximum value of (18) under the condition of (19).
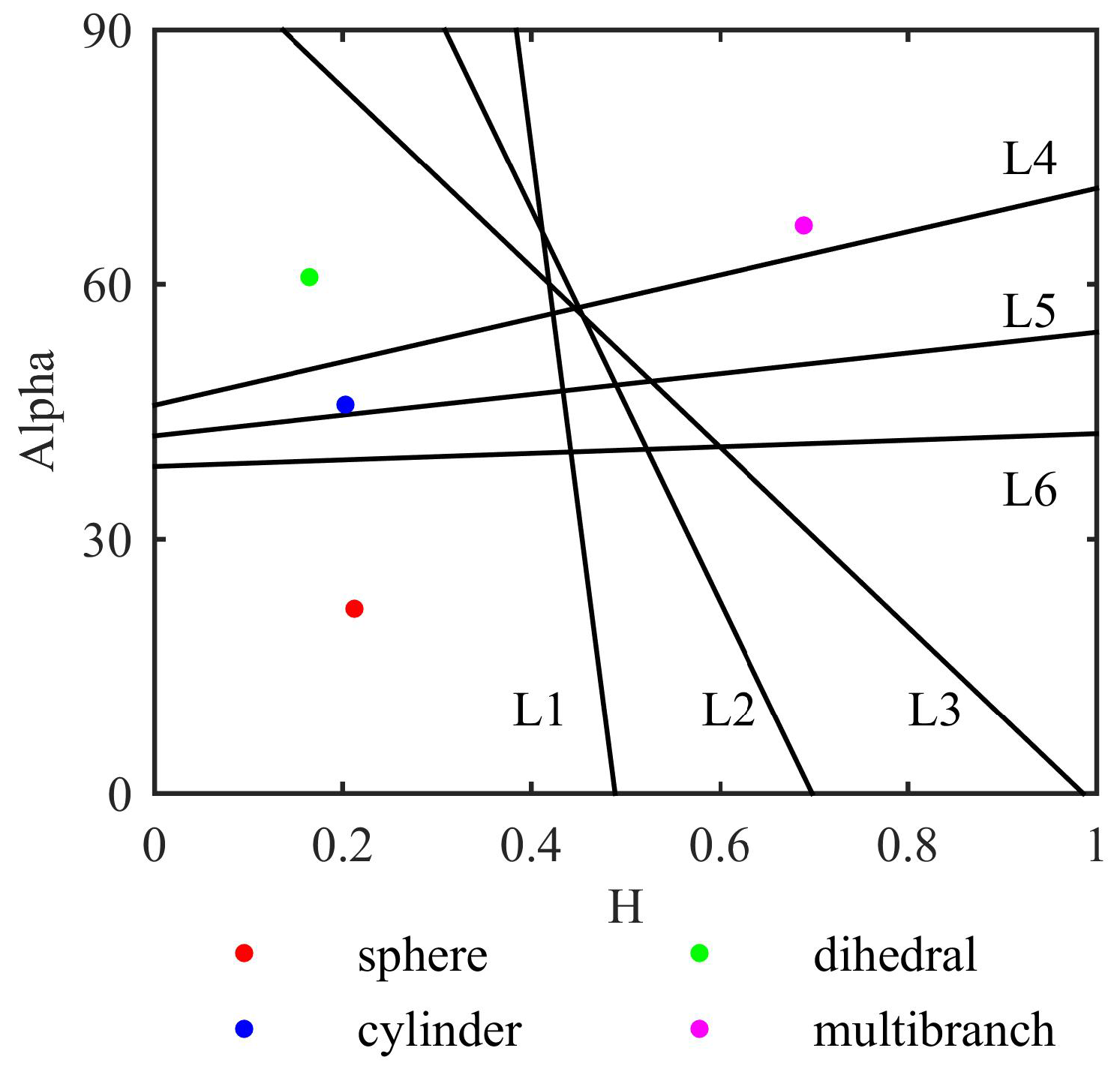
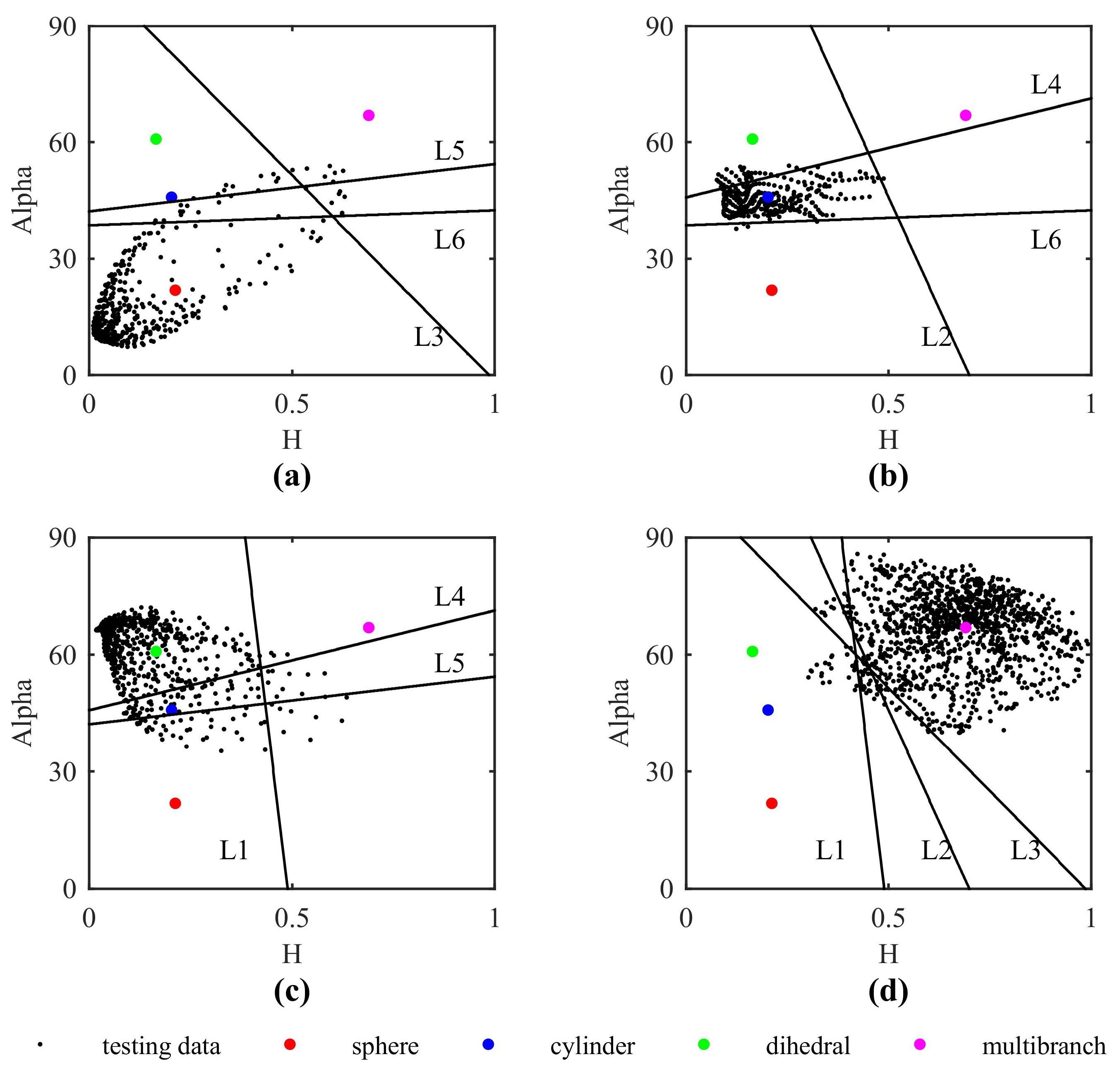
By repeating the above steps, all the boundary lines between every two samples of {
ztn1,
ztn2,…,
ztnP} can be determined. Subsequently, classification can be performed for the new data
zcn where
c represents “
classified”. The discriminant function for the
ith type with the other
jth type is as follows:
where
j = 1,2,…,
P,
j ≠
i. The complete discriminant function of the
ith type is:
If
Fi (
zcn) = 0,
zcn belongs to the
ith type. As
Figure 2b shows, if the new sample point is on the same side of the red line with
Bg1, it belongs to the type of
Bg1.

 ,
, 



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}