Atomic Clock Performance Assessment of BeiDou-3 Basic System with the Noise Analysis of Orbit Determination and Time Synchronization


Abstract
:
1. Introduction
2. Methodology
- The clock differenced data between the clock data of one station or one satellite and reference clock data (AHM station) are derived, named as phase data. The sampling interval is 300 s.
- The preprocessing of data editing is completed on a daily basis. If the data loss rate on a given day (i.e., the percentage between the lost epochs and the sum of epochs (288)) is more than 20%, this day is flagged as an unavailable day. If the phase data on a given day are available, the linear interpolation method is used to fill the phase data for those lost data on a daily basis.
- The phase data of one day are converted to the frequency data by the first-order time difference. Then, with the frequency data, the outliers, the phase jumps, and the frequency jumps are detected and removed by using the median absolute deviation (MAD) method:where is the frequency value and the denotes the median value of the time series of . denotes the sigma of the median deviation under the condition of normal distribution. Five times is regarded as the threshold to reject the bad data (i.e., if , then is treated as an outlier) [28].
- The lost days are counted and flagged, and then the data are fragmented. If the number of days in a continuous segment is less than seven, these data are deleted. There exists the day boundary value between two consecutive days. Thus, the connection point value is deleted and retrieved by using the linear interpolation method. Then, the clean frequency data can be derived.
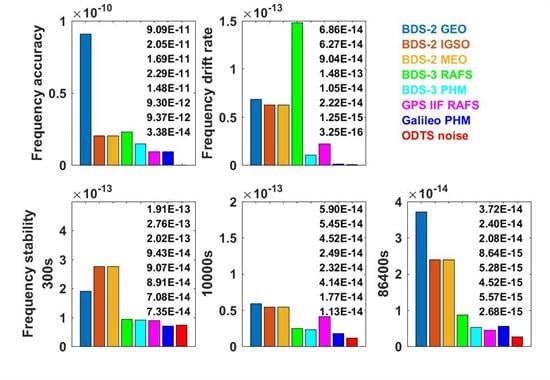
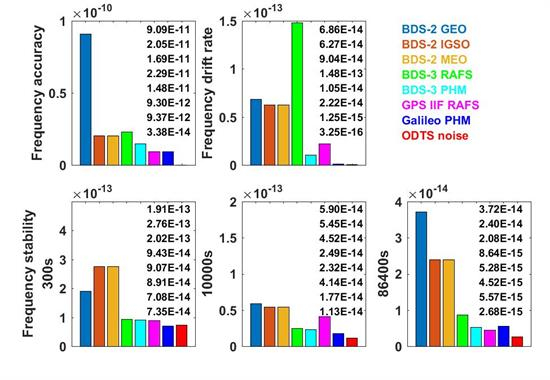
- With the clean frequency data in a continuous arc, the performance of atomic clocks can be calculated, including the frequency accuracy, frequency drift rate (daily), and frequency stability (300 s, 9900 s, and 86,400 s). The HDEV is used to characterize the frequency stability. In the following text, the stability at the averaging time 9900 s is denoted as 10,000 stability.
- Repeat step 5 for the next data arc, and then the clock assessed results can be derived in the next continuous arc. With the frequency accuracy, drift rate, and stability of each continuous arc, the average values of all arcs can be derived, which is the final assessed result of one atomic clock.
3. Precise Orbit and Clock Product Introduction and Analysis
4. Noise Analysis of ODTS
5. Performance Assessment of BDS-3 Satellite Clocks
5.1. Results
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Yang, Y.; Gao, W.; Guo, S.; Mao, Y.; Yang, Y. Introduction to BeiDou-3 navigation satellite system. Navigation 2019, 66, 7–18. [Google Scholar] [CrossRef] [Green Version]
- IGS International GNSS Service BeiDou. Available online: http://mgex.igs.org/IGS_MGEX_Status_BDS.php (accessed on 16 October 2019).
- Zhao, Q.; Guo, J.; Li, M.; Qu, L.; Hu, Z.; Shi, C.; Liu, J. Initial results of precise orbit and clock determination for COMPASS navigation satellite system. J. Geod. 2013, 87, 475–486. [Google Scholar] [CrossRef]
- Lou, Y.; Liu, Y.; Shi, C.; Yao, X.; Zheng, F. Precise orbit determination of BeiDou constellation based on BETS and MGEX network. Sci. Rep. 2014, 4, 4692. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, J.; Chen, G.; Zhao, Q.; Liu, J.; Liu, X. Comparison of solar radiation pressure models for BDS IGSO and MEO satellites with emphasis on improving orbit quality. GPS Solut. 2017, 21, 511–522. [Google Scholar] [CrossRef] [Green Version]
- Dai, X.; Ge, M.; Lou, Y.; Shi, C.; Wickert, J.; Schuh, H. Estimating the yaw-attitude of BDS IGSO and MEO satellites. J. Geod. 2015, 89, 1005–1018. [Google Scholar] [CrossRef]
- Yang, Y.; Li, J.; Wang, A.; Xu, J.; He, H.; Guo, H.; Shen, J.; Dai, X. Preliminary assessment of the navigation and positioning performance of BeiDou regional navigation satellite system. Sci. China Earth Sci. 2014, 57, 144–152. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: Diagnosis and therapy. GPS Solut. 2015, 19, 639–648. [Google Scholar] [CrossRef] [Green Version]
- Gong, H.; Yang, W.; Wang, Y.; Zhu, X.; Wang, F. Comparison of short-term stability estimation methods of GNSS on-board clock. In Proceedings of the China Satellite Navigation Conference (CSNC) 2012 Proceedings, Guanzhou, China, 15–19 May 2012; pp. 503–513. [Google Scholar]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Steigenberger, P.; Hugentobler, U.; Hauschild, A.; Montenbruck, O. Orbit and clock analysis of Compass GEO and IGSO satellites. J. Geod. 2013, 87, 515–525. [Google Scholar] [CrossRef]
- Wang, B.; Lou, Y.; Liu, J.; Zhao, Q.; Su, X. Analysis of BDS satellite clocks in orbit. GPS Solut. 2016, 20, 783–794. [Google Scholar] [CrossRef]
- Hauschild, A.; Montenbruck, O.; Steigenberger, P. Short-term analysis of GNSS clocks. GPS Solut. 2013, 17, 295–307. [Google Scholar] [CrossRef]
- Zhou, S.; Hu, X.; Liu, L.; Guo, R.; Zhu, L.; Chang, Z.; Tang, C.; Gong, X.; Li, R.; Yu, Y. Applications of two-way satellite time and frequency transfer in the BeiDou navigation satellite system. Sci. China Phys. Mech. Astron. 2016, 59, 109511. [Google Scholar] [CrossRef]
- Huang, G.; Cui, B.; Zhang, Q.; Li, P.; Xie, W. Switching and performance variations of on-orbit BDS satellite clocks. Adv. Space Res. 2019, 63, 1681–1696. [Google Scholar]
- Zhang, X.; Wu, M.; Liu, W.; Li, X.; Yu, S.; Lu, C.; Wickert, J. Initial assessment of the COMPASS/BeiDou-3: New-generation navigation signals. J. Geod. 2017, 91, 1225–1240. [Google Scholar] [CrossRef]
- Pan, J.; Hu, X.; Zhou, S.; Tang, C.; Guo, R.; Zhu, L.; Tang, G.; Hu, G. Time synchronization of new-generation BDS satellites using inter-satellite link measurements. Adv. Space Res. 2018, 61, 145–153. [Google Scholar] [CrossRef]
- Li, X.; Yuan, Y.; Zhu, Y.; Huang, J.; Wu, J.; Xiong, Y.; Zhang, X.; Li, X. Precise orbit determination for BDS3 experimental satellites using iGMAS and MGEX tracking networks. J. Geod. 2019, 93, 103–117. [Google Scholar] [CrossRef]
- Wu, Z.; Zhou, S.; Hu, X.; Liu, L.; Shuai, T.; Xie, Y.; Tang, C.; Pan, J.; Zhu, L.; Chang, Z. Performance of the BDS3 experimental satellite passive hydrogen maser. GPS Solut. 2018, 22, 43. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, C.; Guo, J.; Wang, B.; Liu, J. Precise orbit and clock determination for BeiDou-3 experimental satellites with yaw attitude analysis. GPS Solut. 2018, 22, 4. [Google Scholar] [CrossRef] [Green Version]
- Lv, Y.; Geng, T.; Zhao, Q.; Liu, J. Characteristics of BeiDou-3 Experimental Satellite Clocks. Remote Sens. 2018, 10, 1847. [Google Scholar] [CrossRef] [Green Version]
- Yan, X.; Huang, G.; Zhang, Q.; Liu, C.; Wang, L.; Qin, Z. Early analysis of precise orbit and clock offset determination for the satellites of the global BeiDou-3 system. Adv. Space Res. 2019, 63, 1270–1279. [Google Scholar] [CrossRef]
- Xu, X.; Wang, X.; Liu, J.; Zhao, Q. Characteristics of BDS-3 Global Service Satellites: POD, Open Service Signal and Atomic Clock Performance. Remote Sens. 2019, 11, 1559. [Google Scholar] [CrossRef] [Green Version]
- International GNSS Monitoring & Assessment System. Available online: http://www.igmas.org/ (accessed on 16 October 2019).
- Guo, S.; Cai, H.; Meng, Y.; Geng, C.; Jia, X.; Mao, Y.; Geng, T.; Rao, Y.; Zhang, H.; Xie, X. BDS-3 RNSS technical characteristics and service performance. Acta Geod. Cartogr. Sin. 2019, 48, 810–821. [Google Scholar]
- Ruan, R.; Jia, X.; Wu, X.; Feng, L.; Zhu, Y. SPODS software and its result of precise orbit determination for GNSS satellites. In Proceedings of the China Satellite Navigation Conference (CSNC) 2014 Proceedings, Nanjing, China, 21–23 May 2014; Volume III, pp. 301–312. [Google Scholar]
- Riley, W. Handbook of Frequency Stability Analysis; NIST Special Publication: Gaithersburg, MD, USA, 2008.
- Ruan, R. Research on Key Technologies of Precise Data Processing for GNSS Networks. Ph.D. Thesis, Information Engineering University, Zhengzhou, China, 2018. [Google Scholar]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: Strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- IGSMAIL-7783. Format Issue in the igs14_2056 File. Available online: [email protected] (accessed on 16 October 2019).
- European Global Navigation Satellite Systems Agency. Available online: https://www.gsc-europa.eu/system-service-status/constellation-information (accessed on 16 October 2019).
- IGS International GNSS Service GPS. Available online: http://mgex.igs.org/IGS_MGEX_Status_GPS.php (accessed on 16 October 2019).
- Liu, S.; Jia, X.; Sun, D. Performance evaluation of GNSS on-board atomic clock. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 277–284. [Google Scholar] [CrossRef]
- Waller, P.; Gonzalez, F.; Binda, S.; Sesia, I.; Hidalgo, I.; Tobias, G.; Tavella, P. The in-orbit performances of GIOVE clocks. IEEE Trans. Ultrason. Ferroelectr. FrEquation. Control 2010, 57, 738–745. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SVN | PRN | Common Name | Sat. ID | Manuf. | Launch Date | Status |
|---|---|---|---|---|---|---|
| C201 | C19 | MEO-1 | 2017-069A | CAST | 5 November 2017 | USABLE |
| C202 | C20 | MEO-2 | 2017-069B | CAST | 5 November 2017 | USABLE |
| C203 | C27 | MEO-7 | 2018-003A | SECM | 11 January 2018 | USABLE |
| C204 | C28 | MEO-8 | 2018-003B | SECM | 11 January 2018 | USABLE |
| C205 | C22 | MEO-4 | 2018-018A | CAST | 12 February 2018 | USABLE |
| C206 | C21 | MEO-3 | 2018-018B | CAST | 12 February 2018 | USABLE |
| C207 | C29 | MEO-9 | 2018-029A | SECM | 29 March 2018 | USABLE |
| C208 | C30 | MEO-10 | 2018-029B | SECM | 29 March 2018 | USABLE |
| C209 | C23 | MEO-5 | 2018-062A | CAST | 29 July 2018 | USABLE |
| C210 | C24 | MEO-6 | 2018-062B | CAST | 29 July 2018 | USABLE |
| C211 | C26 | MEO-12 | 2018-067A | SECM | 24 August 2018 | USABLE |
| C212 | C25 | MEO-11 | 2018-067B | SECM | 24 August 2018 | USABLE |
| C213 | C32 | MEO-13 | 2018-072A | CAST | 19 September 2018 | USABLE |
| C214 | C33 | MEO-14 | 2018-072B | CAST | 19 September 2018 | USABLE |
| C215 | C35 | MEO-16 | 2018-078A | SECM | 15 October 2018 | USABLE |
| C216 | C34 | MEO-15 | 2018-078B | SECM | 15 October 2018 | USABLE |
| C217 | C59 | GEO-1 | 2018-085A | CAST | 1 November 2018 | TESTING |
| C218 | C36 | MEO-17 | 2018-093A | CAST | 18 November 2018 | USABLE |
| C219 | C37 | MEO-18 | 2018-093B | CAST | 18 November 2018 | USABLE |
| Orbit [m] | Clock [ns] | |||||
|---|---|---|---|---|---|---|
| R | T | N | 3D | RMS | STD | |
| GPS(XRS) | 0.0115 | 0.0132 | 0.0146 | 0.0233 | 0.242 | 0.051 |
| GPS(WUM) | 0.0127 | 0.0121 | 0.0132 | 0.0225 | 0.198 | 0.052 |
| Galileo | 0.0183 | 0.0241 | 0.0296 | 0.0431 | 0.338 | 0.085 |
| BDS-2-GEO | 0.394 | 1.353 | 1.024 | 1.742 | – | 1.31 |
| BDS-2-IGSO | 0.103 | 0.340 | 0.343 | 0.494 | – | 0.16 |
| BDS-2-MEO | 0.115 | 0.213 | 0.230 | 0.334 | – | 0.14 |
| BDS-3-RAFS | 0.118 | 0.225 | 0.242 | 0.351 | – | 0.17 |
| BDS-3-PHM | 0.119 | 0.209 | 0.215 | 0.322 | – | 0.21 |
| Station | Location | Country | Type | Input Frequency | Valid Period |
|---|---|---|---|---|---|
| PTBB | Braunschweig | Germany | AHM | 20 MHZ | 28 January 2010~ |
| KOUR | Kourou | French Guiana | AHM | 10 MHz | 20 November 2012~ |
| MGUE | Malargue | Argentina | AHM | 10 MHz | 28 October 2013~ |
| NOVM | Novosibirsk | Russia | AHM | 5 MHz | 24 July 2001~ |
| Station Diff. | Accuracy | Drift Rate | Stability | ||
|---|---|---|---|---|---|
| 300 s | 10,000 s | 1 Day | |||
| MGUE-KOUR | 5.66 × 10−14 | 4.70 × 10−16 | 5.26 × 10−14 | 8.93 × 10−15 | 1.85 × 10−15 |
| NOVM-KOUR | 2.29 × 10−14 | 2.48 × 10−16 | 1.11 × 10−13 | 1.41 × 10−14 | 3.14 × 10−15 |
| PTBB-KOUR | 2.18 × 10−14 | 2.56 × 10−16 | 5.69 × 10−14 | 1.09 × 10−14 | 3.04 × 10−15 |
| Averaged value | 3.38 × 10−14 | 3.25 × 10−16 | 7.35 × 10−14 | 1.13 × 10−14 | 2.68 × 10−15 |
| GNSS | Satellite Type | PRN | Clock Type |
|---|---|---|---|
| BDS-2 | GEO | C01 C02 C03 C04 C05 | RAFS |
| IGSO | C06 C07 C08 C09 C10 C13 C16 | ||
| MEO | C11 C12 C14 | ||
| BDS-3 | MEO | C20 C21 C22 C23 C24 C32 C33 C36 C37 | RAFS |
| MEO | C25 C26 C27 C28 C29 C30 C34 C35 | PHM | |
| GPS | IIF | G01 G03 G06 G09 G10 G25 G26 G27 G30 G32 | RAFS |
| Galileo | IOV | E12 E19 | PHM |
| FOC | E01 E02 E03 E04 E05 E07 E08 E09 E13 E15 E21 E24 E25 E26 E27 E30 E31 E33 E36 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, X.; Zeng, T.; Ruan, R.; Mao, Y.; Xiao, G. Atomic Clock Performance Assessment of BeiDou-3 Basic System with the Noise Analysis of Orbit Determination and Time Synchronization. Remote Sens. 2019, 11, 2895. https://doi.org/10.3390/rs11242895
Jia X, Zeng T, Ruan R, Mao Y, Xiao G. Atomic Clock Performance Assessment of BeiDou-3 Basic System with the Noise Analysis of Orbit Determination and Time Synchronization. Remote Sensing. 2019; 11(24):2895. https://doi.org/10.3390/rs11242895
Chicago/Turabian StyleJia, Xiaolin, Tian Zeng, Rengui Ruan, Yue Mao, and Guorui Xiao. 2019. "Atomic Clock Performance Assessment of BeiDou-3 Basic System with the Noise Analysis of Orbit Determination and Time Synchronization" Remote Sensing 11, no. 24: 2895. https://doi.org/10.3390/rs11242895