Multi-Resolution Weed Classification via Convolutional Neural Network and Superpixel Based Local Binary Pattern Using Remote Sensing Images



Abstract
:1. Introduction
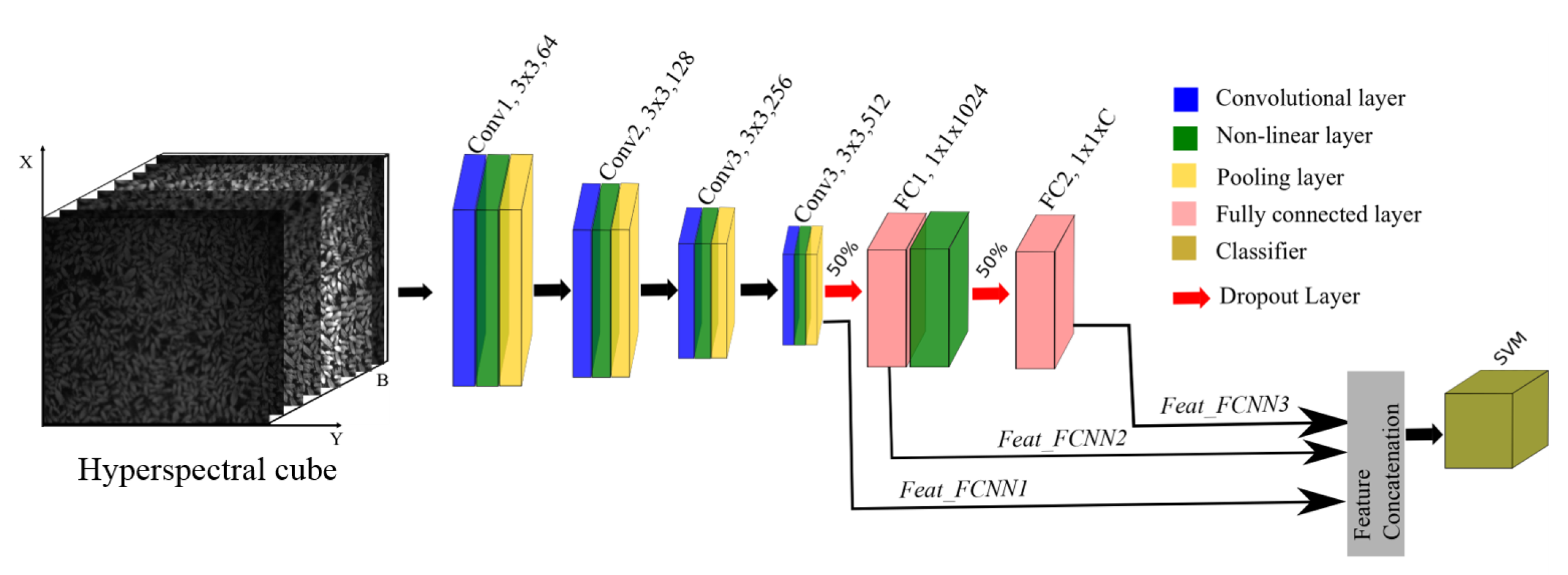
- CNN’s are widely used for the classification and detection of different objects. However, it is the first time that CNN architecture with two dropout (DPO) and fully connected (FC) layers is investigated for the classification of weeds using HSI and MSI datasets.
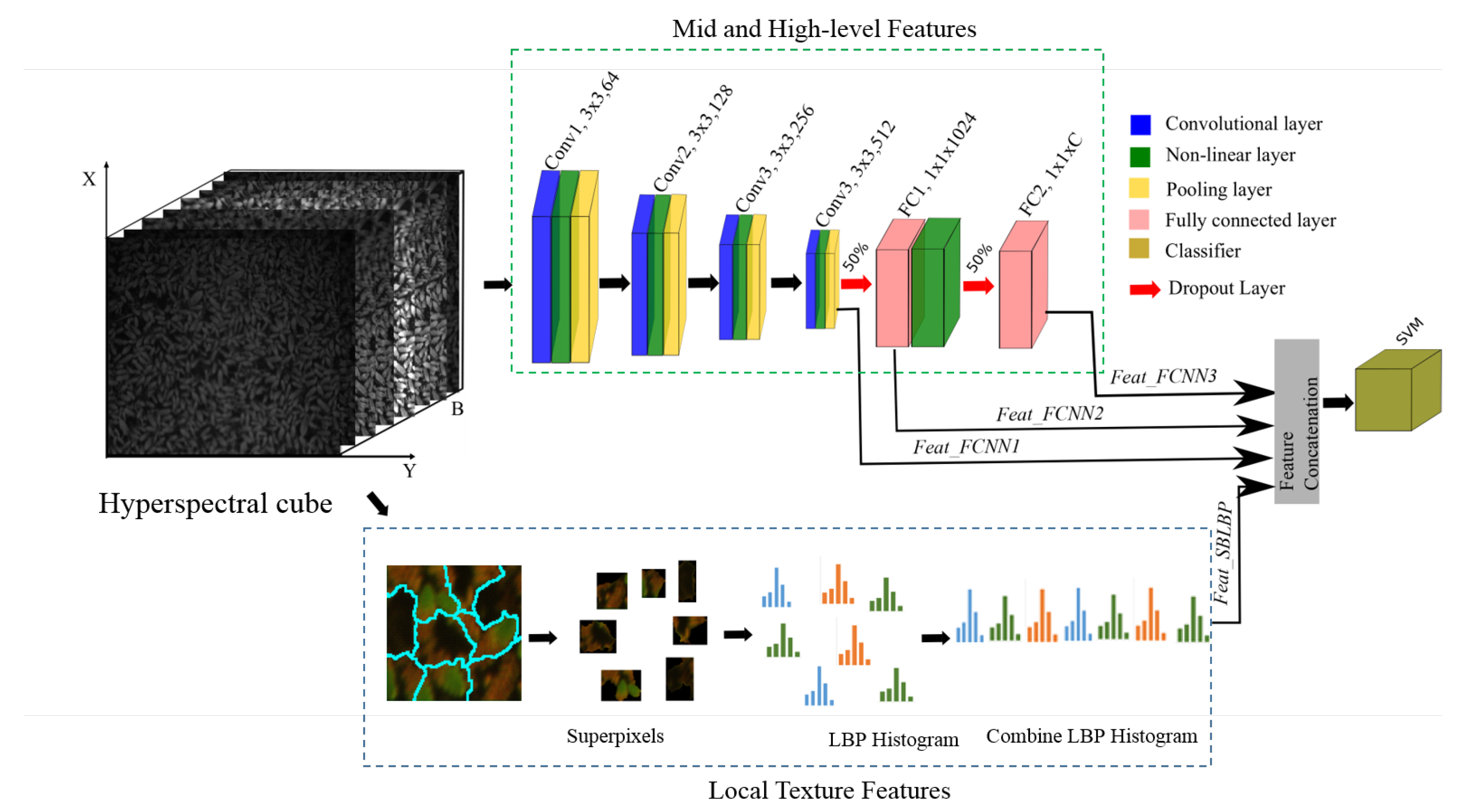
- We combine mid-level and high-level of features extracted from different layers of CNN to form a rich feature representation for the classification of weeds.
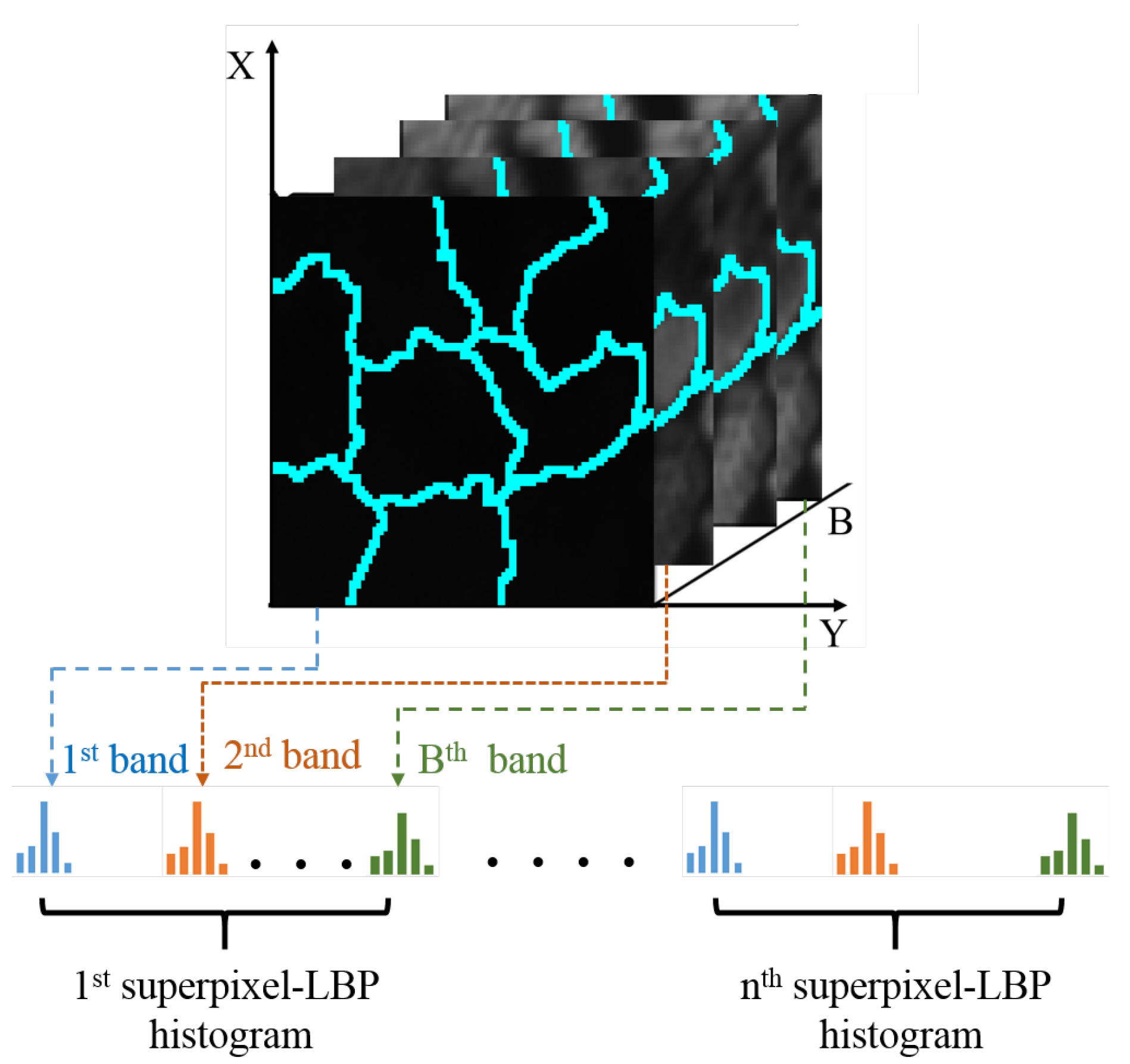
- Local texture features from superpixels based LBP codes and CNN features are combined to improve weed separability from the multi-resolution remote sensing images.
2. Methodology
2.1. Multi-Layer Fused Convolution Neural Network (FCNN)
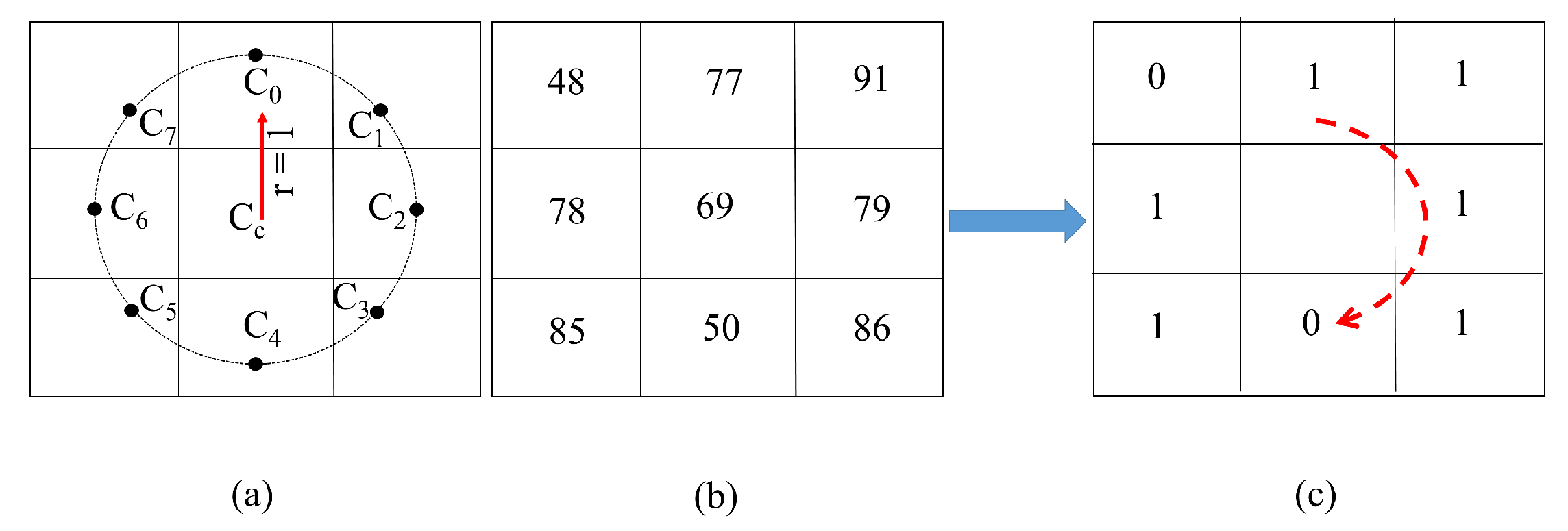
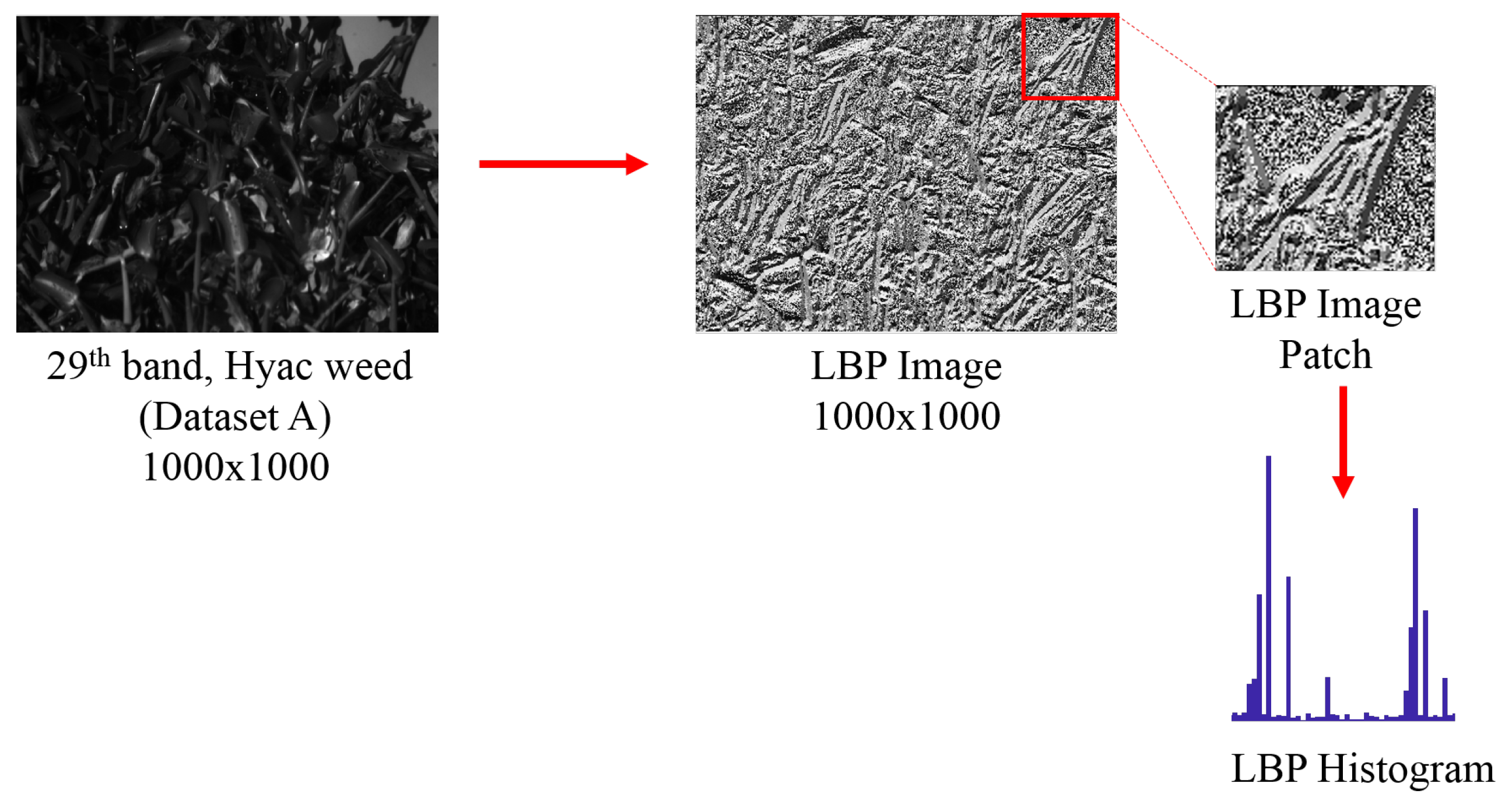
2.2. Superpixel-Based Local Binary Pattern (SPLBP)
- The input image is converted to the CIELAB color space.
- The five-dimensional vector is obtained from each pixel, where are the LAB pixel components and are the coordinates of the image pixel.
- To achieve the clustering on a five-dimensional vector, pixel similarity metric is constructed. The similarity metric between pixels and is calculated as follows:
2.3. Feature Fusion
2.4. Classification of Fused Features
3. Experimental Settings and Results
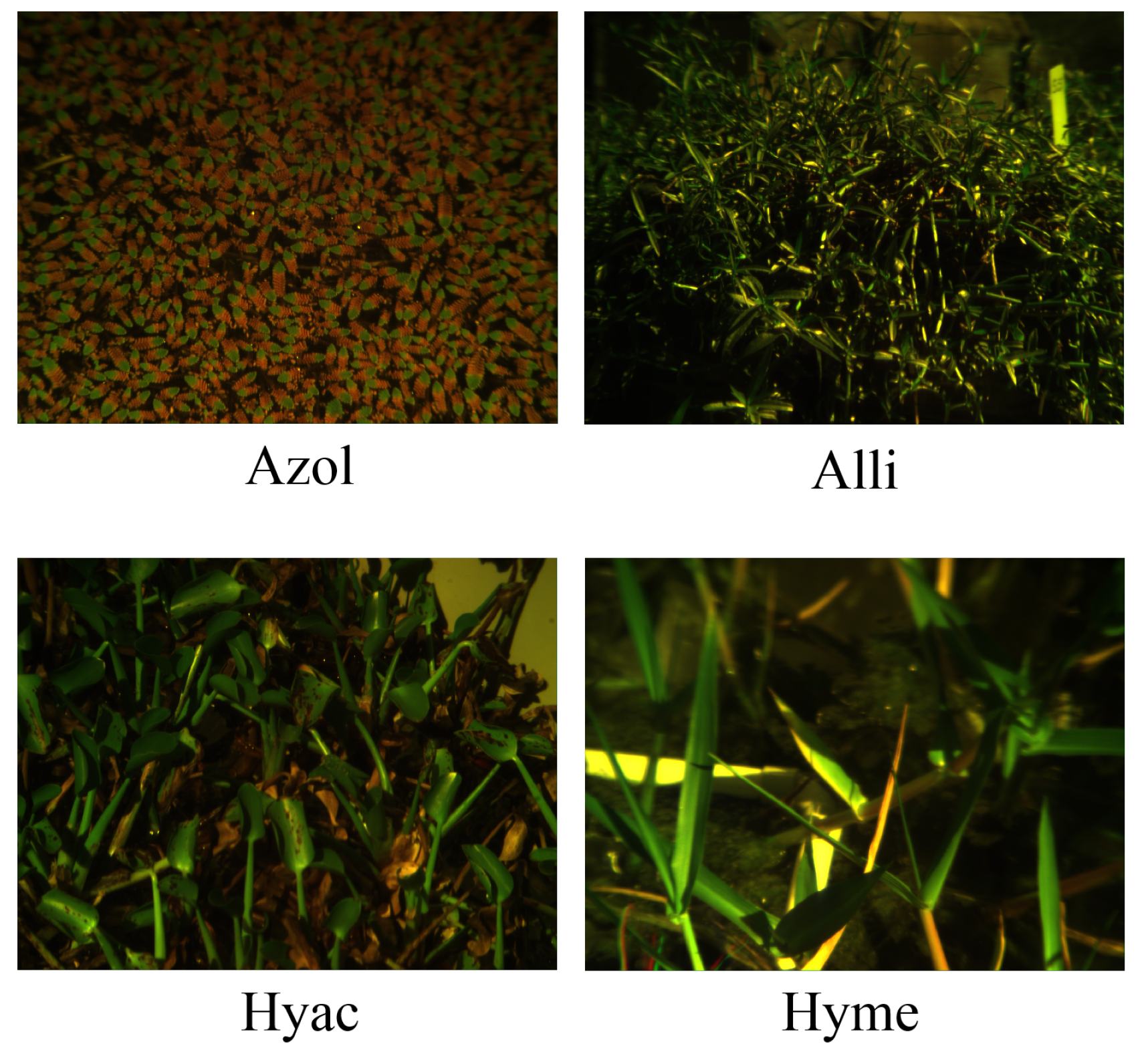
3.1. Hyper/Multi-Spectral Dataset
3.2. Classification Results and Discussions
3.2.1. Dataset A
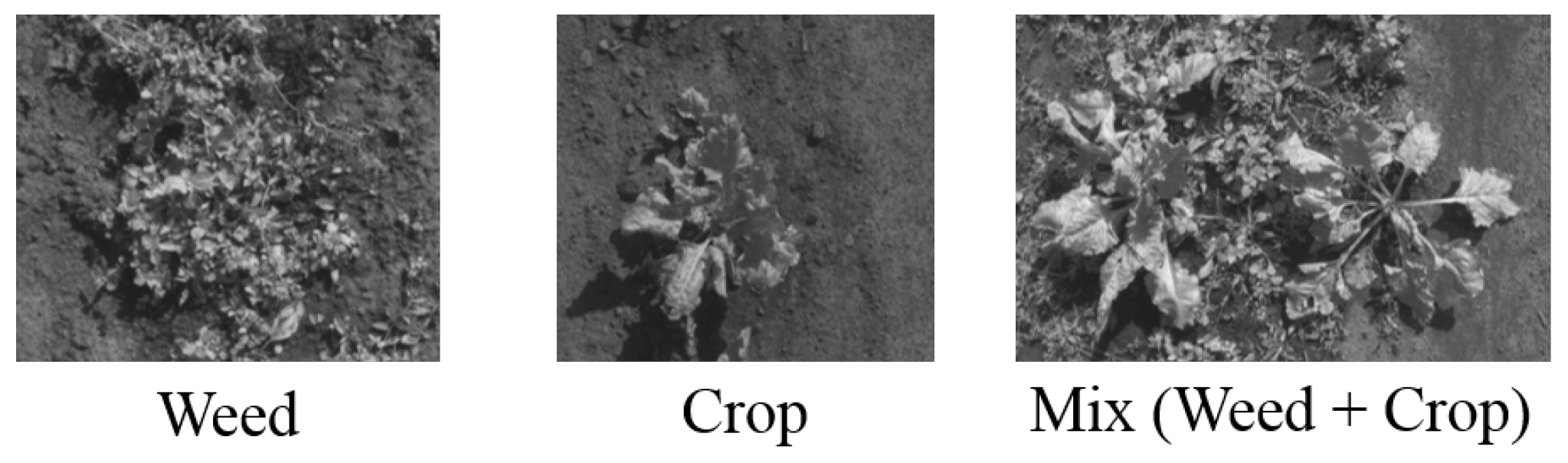
3.2.2. Dataset B
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Invasive Plants and Animals Committee. Australian Weeds Strategy 2017 to 2027; Australian Government Department of Agriculture of Water Resources: Canberra, Australia, 2016.
- Sa, I.; Chen, Z.; Popovi, M.; Khanna, R.; Liebisch, F.; Nieto, J.; Siegwart, R. WeedNet: Dense semantic weed classification using multispectral images and MAV for smart farming. IEEE Robot. Autom. Lett. 2018, 3, 588–595. [Google Scholar] [CrossRef]
- Pearlstein, L.; Kim, M.; Seto, W. Convolutional neural network application to plant detection, based on synthetic imagery. In Proceedings of the 2016 IEEE Applied Imagery Pattern Recognition Workshop (AIPR), Washington, DC, USA, 18–20 October 2016; pp. 1–4. [Google Scholar]
- Hung, C.; Xu, Z.; Sukkarieh, S. Feature learning based approach for weed classification using high-resolution aerial images from a digital camera mounted on a UAV. Remote Sens. 2014, 6, 12037–12054. [Google Scholar] [CrossRef]
- Paoletti, M.; Haut, J.; Plaza, J.; Plaza, A. A new deep convolutional neural network for fast hyperspectral image classification. ISPRS J. Photogramm. Remote Sens. 2018, 145, 120–147. [Google Scholar] [CrossRef]
- Chavan, T.R.; Nandedkar, A.V. Agroavnet for crops and weeds classification: A step forward in automatic farming. Comput. Electron. Agric. 2018, 154, 361–372. [Google Scholar] [CrossRef]
- Burks, T.; Shearer, S.; Gates, R.; Donohue, K. Backpropagation neural network design and evaluation for classifying weed species using color image texture. Trans. ASAE 2000, 43, 1029. [Google Scholar] [CrossRef]
- Burks, T.; Shearer, S.; Payne, F. Classification of weed species using color texture features and discriminant analysis. Trans. ASAE 2000, 43, 1001. [Google Scholar] [CrossRef]
- El-Faki, M.; Zhang, N.; Peterson, D. Factors affecting color-based weed detection. Trans. ASAE 2000, 43, 441. [Google Scholar]
- Guo, W.; Rage, U.K.; Ninomiya, S. Illumination invariant segmentation of vegetation for time series wheat images based on decision tree model. Comput. Electron. Agric. 2013, 96, 58–66. [Google Scholar] [CrossRef]
- Perez-Ortiz, M.; Pena, J.M.; Gutierrez, P.A.; Torres-Sanchez, J.; Hervas-Martnez, C.; Lopez-Granados, F. Selecting patterns and features for between-and within-crop-row weed mapping using uav imagery. Expert Syst. Appl. 2016, 47, 85–94. [Google Scholar] [CrossRef]
- Farooq, A.; Hu, J.; Jia, X. Analysis of spectral bands and spatial resolutions for weed classification via deep convolutional neural network. IEEE Geosci. Remote. Sens. Lett. 2018, 16, 183–187. [Google Scholar] [CrossRef]
- Ojala, T.; Pietikainen, M.; Maenpaa, T. Multiresolution gray-scale and rotation invariant texture classification with local binary patterns. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 971–987. [Google Scholar] [CrossRef]
- Brahnam, S.; Jain, L.C.; Nanni, L.; Lumini, A. Local Binary Patterns: New Variants and Applications; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar]
- Zhao, G.; Pietikainen, M. Dynamic texture recognition using local binary patterns with an application to facial expressions. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 29, 915–928. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Wang, X.; Zhou, J.; You, J. Robust texture image representation by scale selective local binary patterns. IEEE Trans. Image Process. 2016, 25, 687–699. [Google Scholar] [CrossRef] [PubMed]
- Liao, S.; Law, M.W.; Chung, A.C. Dominant local binary patterns for texture classification. IEEE Trans. Image Process. 2009, 18, 1107–1118. [Google Scholar] [CrossRef] [PubMed]
- Guo, Z.; Zhang, L.; Zhang, D. Rotation invariant texture classification using lbp variance (lbpv) with global matching. Pattern Recognit. 2010, 43, 706–719. [Google Scholar] [CrossRef]
- Pietikainen, M.; Ojala, T.; Xu, Z. Rotation-invariant texture classification using feature distributions. Pattern Recognit. 2000, 33, 43–52. [Google Scholar] [CrossRef] [Green Version]
- Musci, M.; Feitosa, R.Q.; da Costa, G.A.O.P.; Velloso, M.L.F. Assessment of binary coding techniques for texture characterization in remote sensing imagery. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1607–1611. [Google Scholar] [CrossRef]
- Li, W.; Chen, C.; Su, H.; Du, Q. Local binary patterns and extreme learning machine for hyperspectral imagery classification. IEEE Trans. Geosci. Remote. Sens. 2015, 53, 3681–3693. [Google Scholar] [CrossRef]
- Liu, M.-Y.; Tuzel, O.; Ramalingam, S.; Chellappa, R. Entropy rate superpixel segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Washington, DC, USA, 20–25 June 2011; pp. 2097–2104. [Google Scholar]
- Shi, J.; Malik, J. Normalized cuts and image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 888–905. [Google Scholar]
- Achanta, R.; Shaji, A.; Smith, K.; Lucchi, A.; Fua, P.; Susstrunk, S. Slic superpixels compared to state-of-the-art superpixel methods. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 2274–2282. [Google Scholar] [CrossRef]
- Fang, L.; Li, S.; Duan, W.; Ren, J.; Benediktsson, J.A. Classification of hyperspectral images by exploiting spectralspatial information of superpixel via multiple kernels. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6663–6674. [Google Scholar] [CrossRef]
- Li, J.; Zhang, H.; Zhang, L. Efficient superpixel-level multitask joint sparse representation for hyperspectral image classification. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5338–5351. [Google Scholar]
- Jia, S.; Deng, B.; Zhu, J.; Jia, X.; Li, Q. Local binary pattern-based hyperspectral image classification with superpixel guidance. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 749–759. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, B. An improved spectral-spatial classification framework for hyperspectral remote sensing images. In Proceedings of the International Conference on Audio, Language and Image Processing (ICALIP), Shanghai, China, 7–9 July 2014; pp. 532–536. [Google Scholar]
- He, Z.; Shen, Y.; Zhang, M.; Wang, Q.; Wang, Y.; Yu, R. Spectralspatial hyperspectral image classification via svm and superpixel segmentation. In Proceedings of the International Proceedings on Instrumentation and Measurement Technology Conference (I2MTC), Montevideo, Uruguay, 12–15 May 2014; pp. 422–427. [Google Scholar]
- Lottes, P.; Horferlin, M.; Sander, S.; Stachniss, C. Effective vision based classification for separating sugar beets and weeds for precision farming. J. Field Robot. 2017, 34, 1160–1178. [Google Scholar] [CrossRef]
- Lottes, P.; Khanna, R.; Pfeifer, J.; Siegwart, R.; Stachniss, C. UAV based crop and weed classification for smart farming. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; pp. 3024–3031. [Google Scholar]
- McCool, C.; Perez, T.; Upcroft, B. Mixtures of lightweight deep convolutional neural networks: applied to agricultural robotics. IEEE Robot. Autom. Lett. 2017, 2, 1344–1351. [Google Scholar] [CrossRef]
- Milioto, A.; Lottes, P.; Stachniss, C. Real-time semantic segmentation of crop and weed for precision agriculture robots leveraging background knowledge in CNNs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–26 May 2018; pp. 2229–2235. [Google Scholar]
- Sellami, A.; Farah, M.; Farah, I.R.; Solaiman, B. Hyperspectral imagery classification based on semi-supervised 3D deep neural network and adaptive band selection. Expert Syst. Appl. 2019, 129, 246–259. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, H.; Shen, Q. Spectral–spatial classification of hyperspectral imagery with 3D convolutional neural network. Remote Sens. 2017, 9, 67. [Google Scholar] [CrossRef]
- Mortensen, A.K.; Dyrmann, M.; Karstoft, H.; Jorgensen, R.N.; Gislum, R. Semantic segmentation of mixed crops using deep convolutional neural network. In Proceedings of the International Conference on Agricultural Engineering, Aarhus, Denmark, 28–29 June 2016. [Google Scholar]
- Potena, C.; Nardi, D.; Pretto, A. Fast and accurate crop and weed identification with summarized train sets for precision agriculture. In Proceedings of the International Conference on Intelligent Autonomous Systems, Shanghai, China, 3–7 July 2016; pp. 105–121. [Google Scholar]
- dos Santos Ferreira, A.; Freitas, D.M.; da Silva, G.G.; Pistori, H.; Folhes, M.T. Weed detection in soybean crops using convnets. Comput. Electron. Agric. 2017, 143, 314–324. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, L.; Du, B. Deep learning for remote sensing data: A technical tutorial on the state of the art. IEEE Geosci. Remote. Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; Williams, R.J. Learning representations by back-propagating errors. Nature 1986, 323, 533. [Google Scholar] [CrossRef]
- Wilson, A.C.; Roelofs, R.; Stern, M.; Srebro, N.; Recht, B. The marginal value of adaptive gradient methods in machine learning. In Advances in Neural Information Processing Systems; The MIT Press: Cambridge, MA, USA, 2017; pp. 4148–4158. [Google Scholar]
- Zeiler, M.D.; Fergus, R. Visualizing and understanding convolutional networks. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Lee, S.H.; Chan, C.S.; Mayo, S.J.; Remagnino, P. How deep learning extracts and learns leaf features for plant classification. Pattern Recognit. 2017, 71, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Lam, O.; Jacobson, A.; Milford, M. Convolutional neural network-based place recognition. arXiv 2014, arXiv:1411.1509. [Google Scholar]
- Oquab, M.; Bottou, L.; Laptev, I.; Sivic, J. Learning and transferring mid-level image representations using convolutional neural networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 24–27 June 2014; pp. 1717–1724. [Google Scholar]
- Sun, X.; Zhang, F.; Yang, L.; Zhang, B.; Gao, L. A hyperspectral image spectral unmixing method integrating slic superpixel segmentation. In Proceedings of the 7th Workshop on Hyperspectral Image and Signal Processing: Evolution in Remote Sensing (WHISPERS), Tokyo, Japan, 2–5 June 2015; pp. 1–4. [Google Scholar]
- Li, W.; Prasad, S.; Fowler, J.E.; Bruce, L.M. Locality-preserving dimensionality reduction and classification for hyperspectral image analysis. IEEE Trans. Geosci. Remote Sens. 2012, 50, 1185–1198. [Google Scholar] [CrossRef]
- Camps-Valls, G.; Gomez-Chova, L.; Munoz-Mari, J.; Vila-Frances, J.; Calpe-Maravilla, J. Composite kernels for hyperspectral image classification. IEEE Geosci. Remote Sens. Lett. 2014, 3, 93–97. [Google Scholar] [CrossRef]
- Mountrakis, G.; Im, J.; Ogole, C. Support vector machines in remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2011, 66, 247–259. [Google Scholar] [CrossRef]
- Vedaldi, A.; Lenc, K. Matconvnet: Convolutional neural networks for matlab. In Proceedings of the 23rd ACM International Conference on Multimedia, Brisbane, Australia, 26–30 October 2015; pp. 689–692. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No | Class | Total_Images |
|---|---|---|
| 1 | Azol | 100 |
| 2 | Alli | 200 |
| 3 | Hyac | 100 |
| 4 | Hyme | 200 |
| No | Class | Total_Images |
|---|---|---|
| 1 | Crop | 142 |
| 2 | Weed | 198 |
| 3 | Mix (Crop + Weed) | 188 |
| m | 4 | 6 | 8 | 10 |
|---|---|---|---|---|
| Class | CNN Mean Accuracy | LBP Mean Accuracy | FCNN Mean Accuracy | SPLBP Mean Accuracy | FCNN-SPLBP Mean Accuracy |
|---|---|---|---|---|---|
| 1 | |||||
| 2 | |||||
| 3 | |||||
| 4 | |||||
| OA |
| Class | CNN Mean Accuracy | LBP Mean Accuracy | FCNN Mean Accuracy | SPLBP Mean Accuracy | FCNN-SPLBP Mean Accuracy |
|---|---|---|---|---|---|
| 1 | |||||
| 2 | |||||
| 3 | |||||
| OA |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Farooq, A.; Jia, X.; Hu, J.; Zhou, J. Multi-Resolution Weed Classification via Convolutional Neural Network and Superpixel Based Local Binary Pattern Using Remote Sensing Images. Remote Sens. 2019, 11, 1692. https://doi.org/10.3390/rs11141692
Farooq A, Jia X, Hu J, Zhou J. Multi-Resolution Weed Classification via Convolutional Neural Network and Superpixel Based Local Binary Pattern Using Remote Sensing Images. Remote Sensing. 2019; 11(14):1692. https://doi.org/10.3390/rs11141692
Chicago/Turabian StyleFarooq, Adnan, Xiuping Jia, Jiankun Hu, and Jun Zhou. 2019. "Multi-Resolution Weed Classification via Convolutional Neural Network and Superpixel Based Local Binary Pattern Using Remote Sensing Images" Remote Sensing 11, no. 14: 1692. https://doi.org/10.3390/rs11141692