A Novel Framework of Detecting Convective Initiation Combining Automated Sampling, Machine Learning, and Repeated Model Tuning from Geostationary Satellite Data


Abstract
:
1. Introduction
2. Data
2.1. Himawari-8 AHI
2.2. Interest Fields
2.3. Ground Weather Radar
3. Methodology
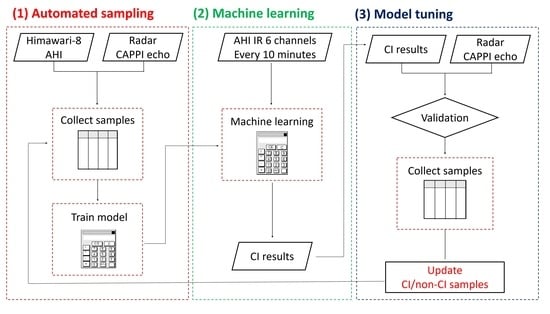
3.1. The Proposed Framework
3.2. The Automated Sampling Tool
- First, a certain seed point (pixel A) is solely assigned to a region R.
- Four neighboring points (up, down, left and right) of the pixel A are added to the candidate pixel list.
- The differences of (11.2) µm between the mean of region R and each point in the candidate list are calculated.
- The pixel with the minimum difference (e.g., pixel B) amongst the candidate points is added to the region R, and the mean temperature of the region R is updated.
- Neighboring pixels of the pixel B are added to the candidate pixel list.
- Repeat steps 3–5 until the minimum difference exceeds the threshold (here, 1.5 K).
3.3. Machine Learning-Based CI modelling
3.4. Model Tuning Throught the Validation
4. Results and Discussion
4.1. Temporal Trend of Automated Collected Samples
4.2. Variable Importance
4.3. Model Performance
4.4. Novelty and Limitations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| ABI | Advanced Baseline Imager |
| AHI | Advanced Himawari Imager |
| AMI | Advanced Meteorological Imager |
| AMV | Atmospheric Motion Vector |
| CAPPI | Constant Altitude Plan Position Indicator |
| CART | Classification and Regression Tree |
| CI | Convective Initiation |
| COMS | Communication, Ocean and Meteorological Satellite |
| DT | Decision Tree |
| FAR | False Alarm Rate |
| GOES | Geostationary Operational Environmental Satellite |
| JMA | Japan Meteorological Agency |
| KMA | Korea Meteorological Agency |
| LR | Logistic Regression |
| MI | Meteorological Imager |
| MSG | Meteosat Second Generation |
| NWP | Numerical Weather Prediction |
| PCA | Principle Component Analysis |
| POD | Probability of Detection |
| RF | Random Forest |
| SEVIRI | Spinning Enhanced Visible and Infrared Imager |
| SVM | Support Vector Machine |
References
- Soriano, L.R.; de Pablo, F.; Díez, E.G. Relationship between Convective Precipitation and Cloud-to-Ground Lightning in the Iberian Peninsula. Mon. Weather Rev. 2002, 129, 2998–3003. [Google Scholar] [CrossRef]
- Boccippio, D.J.; Cummins, K.L.; Christian, H.J.; Goodman, S.J. Combined Satellite-and Surface-Based Estimation of the Intracloud–Cloud-to-Ground Lightning Ratio over the Continental United States. Mon. Weather Rev. 2002, 129, 108–122. [Google Scholar] [CrossRef]
- Vondou, D.A.; Nzeukou, A.; Kamga, F.M. Diurnal cycle of convective activity over the West of Central Africa based on Meteosat images. Int. J. Appl. Earth Obs. Geoinf. 2010, 12, S58–S62. [Google Scholar] [CrossRef]
- Wang, C.-C.; Chen, G.T.-J.; Carbone, R.E.; Wang, C.-C.; Chen, G.T.-J.; Carbone, R.E. A Climatology of Warm-Season Cloud Patterns over East Asia Based on GMS Infrared Brightness Temperature Observations. Mon. Weather Rev. 2004, 132, 1606–1629. [Google Scholar] [CrossRef]
- Mecikalski, J.R.; Bedka, K.M. Forecasting Convective Initiation by Monitoring the Evolution of Moving Cumulus in Daytime GOES Imagery. Mon. Weather Rev. 2006, 134, 49–78. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Han, H.; Im, J.; Jang, E.; Lee, M.-I. Detection of deterministic and probabilistic convection initiation using Himawari-8 Advanced Himawari Imager data. Atmos. Meas. Tech. 2017, 10, 1859–1874. [Google Scholar] [CrossRef] [Green Version]
- Mecikalski, J.R.; Bedka, K.M.; Paech, S.J.; Litten, L.A. A Statistical Evaluation of GOES Cloud-Top Properties for Nowcasting Convective Initiation. Mon. Weather Rev. 2008, 136, 4899–4914. [Google Scholar] [CrossRef] [Green Version]
- Walker, J.R.; MacKenzie, W.M., Jr.; Mecikalski, J.R.; Jewett, C.P. An Enhanced Geostationary Satellite-Based Convective Initiation Algorithm for 0-2-h Nowcasting with Object Tracking. J. Appl. Meteorol. Climatol. 2012, 51, 1931–1949. [Google Scholar] [CrossRef]
- Mecikalski, J.R.; Williams, J.K.; Jewett, C.P.; Ahijevych, D.; LeRoy, A.; Walker, J.R. Probabilistic 0-1-h Convective Initiation Nowcasts that Combine Geostationary Satellite Observations and Numerical Weather Prediction Model Data. J. Appl. Meteorol. Climatol. 2015, 54, 1039–1059. [Google Scholar] [CrossRef]
- Jewett, C.P.; Mecikalski, J.R. Adjusting thresholds of satellite-based convective initiation interest fields based on the cloud environment. J. Geophys. Res. Atmos. 2013, 118, 12–649. [Google Scholar] [CrossRef]
- Zinner, T.; Mannstein, H.; Tafferner, A. Cb-TRAM: Tracking and monitoring severe convection from onset over rapid development to mature phase using multi-channel Meteosat-8 SEVIRI data. Meteorol. Atmos. Phys. 2008, 101, 191–210. [Google Scholar] [CrossRef] [Green Version]
- Mecikalski, J.R.; MacKenzie, W.M., Jr.; König, M.; Muller, S. Cloud-Top Properties of Growing Cumulus prior to Convective Initiation as Measured by Meteosat Second Generation. Part II: Use of Visible Reflectance. J. Appl. Meteorol. Climatol. 2010, 49, 2544–2558. [Google Scholar] [CrossRef] [Green Version]
- Merk, D.; Zinner, T. Detection of convective initiation using Meteosat SEVIRI: Implementation in and verification with the tracking and nowcasting algorithm Cb-TRAM. Atmos. Meas. Tech. 2013, 6, 1903–1918. [Google Scholar] [CrossRef]
- Zhuge, X.; Zou, X. Summertime convective initiation nowcasting over southeastern China based on Advanced Himawari Imager observations. J. Meteorol. Soc. Jpn. Ser. II 2018, 96, 337–353. [Google Scholar] [CrossRef]
- Han, H.; Lee, S.; Im, J.; Kim, M.; Lee, M.-I.; Ahn, M.H.; Chung, S.-R. Detection of convective initiation using Meteorological Imager onboard Communication, Ocean, and Meteorological Satellite based on machine learning approaches. Remote Sens. 2015, 7, 9184–9204. [Google Scholar] [CrossRef]
- Harris, R.J.; Mecikalski, J.R.; MacKenzie, W.M., Jr.; Durkee, P.A.; Nielsen, K.E. The Definition of GOES Infrared Lightning Initiation Interest Fields. J. Appl. Meteorol. Climatol. 2010, 49, 2527–2543. [Google Scholar] [CrossRef] [Green Version]
- Zinner, T.; Forster, C.; de Coning, E.; Betz, H.D. Validation of the Meteosat storm detection and nowcasting system Cb-TRAM with lightning network data—Europe and South Africa. Atmos. Meas. Tech. 2013, 6, 1567–1583. [Google Scholar] [CrossRef]
- Müller, R.; Haussler, S.; Jerg, M.; Heizenreder, D. A Novel Approach for the Detection of Developing Thunderstorm Cells. Remote Sens. 2019, 11, 415–443. [Google Scholar] [CrossRef]
- Lakshmanan, V.; Smith, T.; Hondl, K.; Stumpf, G.J.; Witt, A. A real-time, three-dimensional, rapidly updating, heterogeneous radar merger technique for reflectivity, velocity, and derived products. Weather Forecast. 2006, 21, 802–823. [Google Scholar] [CrossRef]
- Stumpf, G.; Lakshmanan, V.; Smith, T.; Stumpf, G.; Hondl, K. The Warning Decision Support System-Integrated Information. Weather Forecast. 2007, 22, 596–612. [Google Scholar] [CrossRef]
- Bessho, K.; Date, K.; Hayashi, M.; Ikeda, A.; Imai, T.; Inoue, H.; Kumagai, Y.; Miyakawa, T.; Murata, H.; Ohno, T.; et al. An Introduction to Himawari-8/9 New-Generation Geostationary Meteorological Satellites. J. Meteorol. Soc. Japan. Ser. II 2016, 94, 151–183. [Google Scholar] [CrossRef]
- Da, C. Preliminary assessment of the Advanced Himawari Imager (AHI) measurement onboard Himawari-8 geostationary satellite. Remote Sens. Lett. 2015, 6, 637–646. [Google Scholar] [CrossRef]
- Kurihara, Y.; Murakami, H.; Kachi, M. Sea surface temperature from the new Japanese geostationary meteorological Himawari-8 satellite. Geophys. Res. Lett. 2016, 43, 1234–1240. [Google Scholar] [CrossRef]
- Yumimoto, K.; Nagao, T.M.; Kikuchi, M.; Sekiyama, T.T.; Murakami, H.; Tanaka, T.Y.; Ogi, A.; Irie, H.; Khatri, P.; Okumura, H.; et al. Aerosol data assimilation using data from Himawari-8, a next-generation geostationary meteorological satellite. Geophys. Res. Lett. 2016, 43, 5886–5894. [Google Scholar] [CrossRef]
- Cintineo, J.L.; Pavolonis, M.J.; Sieglaff, J.M.; Heidinger, A.K. Evolution of Severe and Nonsevere Convection Inferred from GOES-Derived Cloud Properties. J. Appl. Meteorol. Climatol. 2013, 52, 2009–2023. [Google Scholar] [CrossRef]
- Berendes, T.A.; Mecikalski, J.R.; MacKenzie, W.M., Jr.; Bedka, K.M.; Nair, U.S. Convective cloud identification and classification in daytime satellite imagery using standard deviation limited adaptive clustering. J. Geophys. Res. 2008, 113, 909. [Google Scholar] [CrossRef]
- Breiman, L. Random forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Guo, Z.; Du, S. Mining parameter information for building extraction and change detection with very high-resolution imagery and GIS data. GIScience Remote Sens. 2017, 54, 38–63. [Google Scholar] [CrossRef]
- Sonobe, R.; Yamaya, Y.; Tani, H.; Wang, X.; Kobayashi, N.; Mochizuki, K. Assessing the suitability of data from Sentinel-1A and 2A for crop classification. GIScience Remote Sens. 2017, 54, 918–938. [Google Scholar] [CrossRef]
- Richardson, H.J.; Hill, D.J.; Denesiuk, D.R.; Fraser, L.H. A comparison of geographic datasets and field measurements to model soil carbon using random forests and stepwise regressions (British Columbia, Canada). GIScience Remote Sens. 2017, 54, 573–591. [Google Scholar] [CrossRef]
- Sim, S.; Im, J.; Park, S.; Park, H.; Ahn, M.; Chan, P. Icing Detection over East Asia from Geostationary Satellite Data Using Machine Learning Approaches. Remote Sens. 2018, 10, 619–631. [Google Scholar] [CrossRef]
- Kim, M.; Im, J.; Park, H.; Park, S.; Lee, M.I.; Ahn, M.H. Detection of tropical overshooting cloud tops using himawari-8 imagery. Remote Sens. 2017, 9, 685. [Google Scholar] [CrossRef]
- Forkuor, G.; Dimobe, K.; Serme, I.; Tondoh, J. Landsat-8 vs. Sentinel-2: Examining the added value of sentinel-2′s red-edge bands to land-use and land-cover mapping in Burkina Faso. GIScience Remote Sens. 2018, 55, 331–354. [Google Scholar]
- Zhang, C.; Smith, M.; Fang, C. Evaluation of Goddard’s LiDAR, hyperspectral, and thermal data products for mapping urban land-cover types. GIScience Remote Sens. 2018, 55, 90–109. [Google Scholar] [CrossRef]
- Liu, T.; Abd-Elrahman, A.; Morton, J.; Wilhelm, V. Comparing fully convolutional networks, random forest, support vector machine, patch-based deep convolutional neural networks for object-based wetland mapping using images from small unmanned aircraft system. GIScience Remote Sens. 2018, 55, 243–264. [Google Scholar] [CrossRef]
- Sieglaff, J.M.; Cronce, L.M.; Feltz, W.F.; Bedka, K.M.; Pavolonis, M.J.; Heidinger, A.K. Nowcasting Convective Storm Initiation Using Satellite-Based Box-Averaged Cloud-Top Cooling and Cloud-Type Trends. J. Appl. Meteorol. Climatol. 2011, 50, 110–126. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AHI Band | Center Wavelength (µm) | Temporal Resolution (min) | Spatial Resolution (km) |
|---|---|---|---|
| 8 | 6.2 | 10 min | 2 |
| 10 | 7.3 | ||
| 11 | 8.6 | ||
| 14 | 11.2 | ||
| 15 | 12.3 | ||
| 16 | 13.3 |
| Interest Fields | Physical Basis |
|---|---|
| 11.2 μm | Cloud-top temperature assessment |
| 6.2–11.2 μm | Cloud-top height relative to tropopause |
| 6.2–7.3 μm | |
| 13.3–11.2 μm | |
| 12.3–11.2 μm | Cloud-top glaciation |
| 8.6–11.2 μm | |
| 11.2 μm time trend | Cloud top cooling rate |
| 6.2–11.2 μm time trend | Temporal changes in cloud-top height |
| 6.2–7.3 μm time trend | |
| 12.3–11.2 μm time trend | |
| (8.6–11.2 μm)–(11.2–12.3 μm) | Cloud-top glaciation |
| (8.6–11.2 μm)–(11.2–12.3 μm) time trend | Temporal changes in cloud-top glaciation |
| Group | ID | Date | Usage | Model Tuning With |
|---|---|---|---|---|
| A | CI-A1 | 01 August 2015 | Training dataset | - |
| CI-A2 | 01 September 2015 | |||
| CI-A3 | 30 June 2016 | |||
| CI-A4 | 06 July 2016 | |||
| CI-A5 | 17 May 2017 | |||
| CI-A6 | 25 June 2017 | |||
| CI-A7 | 25 July 2017 | |||
| CI-A8 | 07 August 2017 | |||
| CI-A9 | 17 August 2017 | |||
| B | CI-B1 | 24 May 2017 | Test & tuning dataset | C+D |
| CI-B1 | 05 July 2017 | |||
| CI-B1 | 10 August 2017 | |||
| C | CI-C1 | 18 June 2017 | Test & tuning dataset | B+D |
| CI-C2 | 02 August 2017 | |||
| CI-C3 | 11 August 2017 | |||
| D | CI-D1 | 28 June 2017 | Test & tuning dataset | B+C |
| CI-D2 | 30 July 2017 | |||
| CI-D3 | 16 August 2017 |
| Skill Score | Group B | Group C | Group D | Overall |
|---|---|---|---|---|
| POD (no tuning) POD (tuning) | 0.72 0.78 | 0.92 0.89 | 0.73 0.79 | 0.79 0.82 |
| FAR (no tuning) FAR (tuning) | 0.48 0.39 | 0.39 0.28 | 0.52 0.44 | 0.46 0.37 |
| Lead time in minutes (no tuning) Lead time in minutes (tuning) | 49.5 38.4 | 37.5 36.1 | 45.0 36.6 | 44.0 37.0 |
| Initial detect time in minutes (no tuning) Initial detect time in minutes (tuning) | 71.6 65.6 | 52.7 55.9 | 75.1 59.7 | 66.4 60.4 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, D.; Lee, J.; Im, J.; Sim, S.; Lee, S.; Han, H. A Novel Framework of Detecting Convective Initiation Combining Automated Sampling, Machine Learning, and Repeated Model Tuning from Geostationary Satellite Data. Remote Sens. 2019, 11, 1454. https://doi.org/10.3390/rs11121454
Han D, Lee J, Im J, Sim S, Lee S, Han H. A Novel Framework of Detecting Convective Initiation Combining Automated Sampling, Machine Learning, and Repeated Model Tuning from Geostationary Satellite Data. Remote Sensing. 2019; 11(12):1454. https://doi.org/10.3390/rs11121454
Chicago/Turabian StyleHan, Daehyeon, Juhyun Lee, Jungho Im, Seongmun Sim, Sanggyun Lee, and Hyangsun Han. 2019. "A Novel Framework of Detecting Convective Initiation Combining Automated Sampling, Machine Learning, and Repeated Model Tuning from Geostationary Satellite Data" Remote Sensing 11, no. 12: 1454. https://doi.org/10.3390/rs11121454