Analysis on the Effects of SAR Imaging Parameters and Environmental Conditions on the Standard Deviation of the Co-Polarized Phase Difference Measured over Sea Surface

 ,
,  ,
, 
Abstract
:
1. Introduction
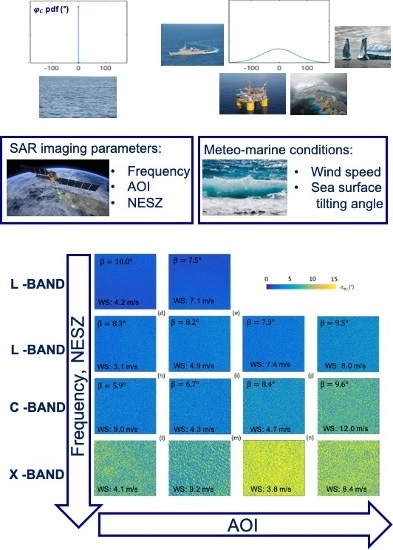
- SAR acquisition parameters, e.g., polarization, Angle Of Incidence (AOI), incident wavelength and Noise-equivalent sigma zero (NESZ);
- target features, e.g., damping properties of the pollutant, ship orientation and ice layer thickness; and
- meteo-marine conditions, e.g., sea state, swell and wave patterns.
- The analysis on the effects of different frequencies, i.e., L- and C-band, and sea surface tilting angle on sea surface was included.
- The analysis on the influence of incidence angle on sea surface was undertaken on a much broader AOI range, i.e., about 20–60.
- The behavior of sea surface with respect to AOI was investigated by comparing model predictions’ with actual SAR measurements over the whole range of Bragg AOIs (≈20–60).
2. Polarimetric Framework
3. Datasets
3.1. SAR Dataset
3.2. Ancillary Wind Field Information
4. Model-Based Experimental Results
5. Experimental Results
5.1. Sensitivity Analysis: Meteo-Marine Parameters
5.2. Sensitivity Analysis: SAR Imaging Parameters
6. Conclusions
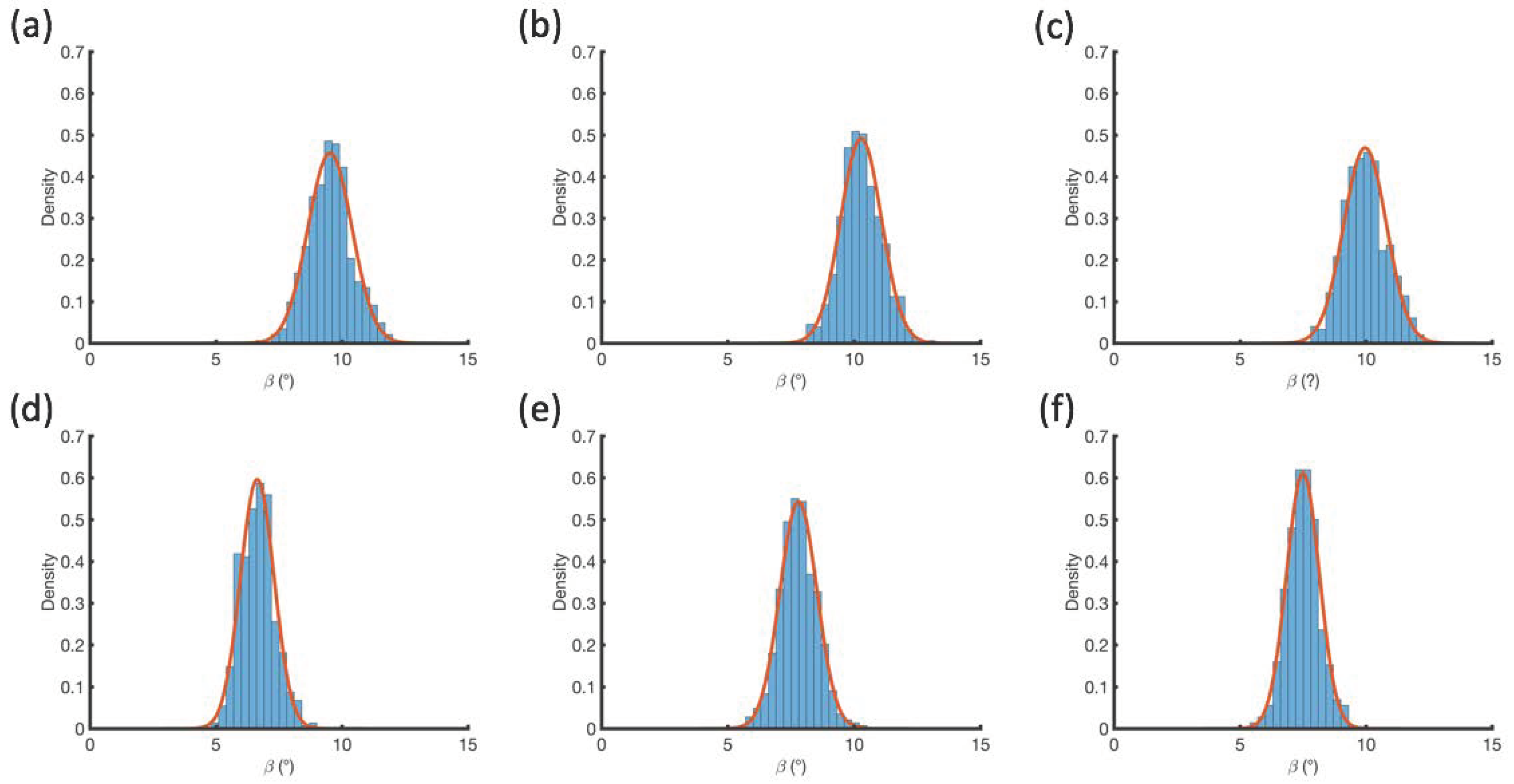
- The X-Bragg sea surface scattering model allows predicting the increasing trend of with respect to AOI over sea surface along the whole range of Bragg scattering incidence angles, i.e., ≈20–60.
- Under low-to-moderate sea state conditions, SAR imaging parameters have a stronger effect on than meteo-marine parameters, which play a negligible role.
- Among SAR imaging parameters, incident wavelength and NESZ result in the most pronounced effect on sea surface .
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AOI | Angle of incidence |
| AP | ALOS PALSAR |
| ASCAT | Advanced Scatterometer |
| CCMP | Cross calibrated multi platform |
| dB | Decibel |
| ECMWF | European Center for Medium-Range Weather Forecasts |
| EUMETSAT | European Organization for the Exploitation of Meteorological Satellites |
| HH | Horizontal transmit-horizontal receive |
| KNMI | Royal Netherlands Meteorological Institute |
| ID | Identifier |
| MetOp | Meteorological operational satellite |
| NASA | National Aeronautics and Space Administration |
| NESZ | Noise-equivalent sigma zero |
| OSI SAF | Ocean and Sea Ice Satellite Application Facility |
| PO.DAAC | Physical Oceanography Distributed Active Archive Center |
| RMS | Remote Sensing Systems |
| ROI | Region of interest |
| RS | RADARSAT-2 |
| SAR | Synthetic aperture radar |
| SLC | Single-look complex |
| SNR | Signal-to-noise ratio |
| TSX | TerraSAR-X |
| VV | Vertical transmit-vertical receive |
| WS | Wind speed |
References
- Costanza, R. The ecological, economic, and social importance of the oceans. Ecol. Econ. 1999, 31, 199–213. [Google Scholar] [CrossRef]
- Visbeck, M. Ocean science research is key for a sustainable future. Nat. Commun. 2018, 9, 690. [Google Scholar] [CrossRef] [PubMed]
- Fanning, L.; Mahon, R.; Baldwin, K.; Douglas, S. Transboundary waters assessment Programme (TWAP) assessment of governance arrangements for the ocean, Volume 1: Transboundary large marine ecosystems. IOC Tech. Ser. 2015, 119, 91. [Google Scholar]
- European Commission. Report on the Blue Growth Strategy Towards More Sustainable Growth and Jobs in the Blue Economy; European Commission: Brussels, Belgium, 2017. [Google Scholar]
- Nations, U. The Sustainable Development Goals Report 2016; United Nations: New York, NY, USA, 2016. [Google Scholar]
- National Academies of Sciences, Engineering, and Medicine and others. Active earth remote sensing for ocean applications. In A Strategy for Active Remote Sensing Amid Increased Demand for Radio Spectrum; National Academies Press: Washington, DC, USA, 2015. [Google Scholar]
- Ding, X.; Nunziata, F.; Li, X.; Migliaccio, M. Performance analysis and validation of waterline extraction approaches using single-and dual-polarimetric SAR data. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 1019–1027. [Google Scholar] [CrossRef]
- Nunziata, F.; Buono, A.; Migliaccio, M.; Benassai, G. Dual-polarimetric C-and X-band SAR data for coastline extraction. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2016, 9, 4921–4928. [Google Scholar] [CrossRef]
- Yu, Y.; Acton, S.T. Automated delineation of coastline from polarimetric SAR imagery. Int. J. Remote Sens. 2004, 25, 3423–3438. [Google Scholar] [CrossRef]
- Velotto, D.; Nunziata, F.; Migliaccio, M.; Lehner, S. Dual-polarimetric TerraSAR-X SAR data for target at sea observation. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1114–1118. [Google Scholar] [CrossRef]
- Nunziata, F.; Migliaccio, M.; Brown, C.E. Reflection symmetry for polarimetric observation of man-made metallic targets at sea. IEEE J. Ocean. Eng. 2012, 37, 384–394. [Google Scholar] [CrossRef]
- Li, H.; Perrie, W.; He, Y.; Lehner, S.; Brusch, S. Target detection on the ocean with the relative phase of compact polarimetry SAR. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3299–3305. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F. On the exploitation of polarimetric SAR data to map damping properties of the Deepwater Horizon oil spill. Int. J. Remote Sens. 2014, 35, 3499–3519. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F.; Buono, A. SAR polarimetry for sea oil slick observation. Int. J. Remote Sens. 2015, 36, 3243–3273. [Google Scholar] [CrossRef] [Green Version]
- Buono, A.; Nunziata, F.; Migliaccio, M.; Li, X. Polarimetric analysis of compact-polarimetry SAR architectures for sea oil slick observation. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5862–5874. [Google Scholar] [CrossRef]
- Velotto, D.; Migliaccio, M.; Nunziata, F.; Lehner, S. Dual-polarized TerraSAR-X data for oil-spill observation. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4751–4762. [Google Scholar] [CrossRef]
- Marino, A.; Dierking, W.; Wesche, C. A depolarization ratio anomaly detector to identify icebergs in sea ice using dual-polarization SAR images. IEEE Trans. Geosci. Remote Sens. 2016, 54, 5602–5615. [Google Scholar] [CrossRef]
- Dabboor, M.; Geldsetzer, T. Towards sea ice classification using simulated RADARSAT Constellation Mission compact polarimetric SAR imagery. Remote Sens. Environ. 2014, 140, 189–195. [Google Scholar] [CrossRef]
- Gill, J.P.; Yackel, J.J. Evaluation of C-band SAR polarimetric parameters for discrimination of first-year sea ice types. Can. J. Remote Sens. 2012, 38, 306–323. [Google Scholar] [CrossRef]
- Touzi, R.; Charbonneau, F.; Hawkins, R.; Vachon, P. Ship detection and characterization using polarimetric SAR. Can. J. Remote Sens. 2004, 30, 552–559. [Google Scholar] [CrossRef]
- Nunziata, F.; Buono, A.; Migliaccio, M. COSMO-SkyMed Synthetic Aperture Radar Data to Observe the Deepwater Horizon Oil Spill. Sustainability 2018, 10, 3599. [Google Scholar] [CrossRef]
- Kudryavtsev, V.N.; Chapron, B.; Myasoedov, A.G.; Collard, F.; Johannessen, J.A. On dual co-polarized SAR measurements of the ocean surface. IEEE Geosci. Remote Sens. Lett. 2013, 10, 761–765. [Google Scholar] [CrossRef]
- Liu, C.; Vachon, P.; Geling, G. Improved ship detection with airborne polarimetric SAR data. Can. J. Remote Sens. 2005, 31, 122–131. [Google Scholar] [CrossRef]
- Minchew, B. Determining the mixing of oil and sea water using polarimetric synthetic aperture radar. Geophys. Res. Lett. 2012, 39. [Google Scholar] [CrossRef] [Green Version]
- Marino, A.; Velotto, D.; Nunziata, F. Offshore Metallic Platforms Observation Using Dual-Polarimetric TS-X/TD-X Satellite Imagery: A Case Study in the Gulf of Mexico. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 4376–4386. [Google Scholar] [CrossRef]
- Ryu, E.; Yang, C.S.; Ouchi, K. Comparison of Ship Detection Accuracy Based on Image Contrast with Different Combinations HH-and VV-polarization TerraSAR-X SAR Images. IEICE Tech. Rep. 2017, 117, 13–16. [Google Scholar]
- Salberg, A.B.; Rudjord, Ø.; Solberg, A.H.S. Oil spill detection in hybrid-polarimetric SAR images. IEEE Trans. Geosci. Remote Sens. 2014, 52, 6521–6533. [Google Scholar] [CrossRef]
- Migliaccio, M.; Nunziata, F.; Gambardella, A. On the co-polarized phase difference for oil spill observation. Int. J. Remote Sens. 2009, 30, 1587–1602. [Google Scholar] [CrossRef]
- Dierking, W.; Wesche, C. C-Band radar polarimetry—Useful for detection of icebergs in sea ice? IEEE Trans. Geosci. Remote Sens. 2014, 52, 25–37. [Google Scholar] [CrossRef]
- Moen, M.A.; Doulgeris, A.P.; Anfinsen, S.N.; Renner, A.H.; Hughes, N.; Gerland, S.; Eltoft, T. Comparison of feature based segmentation of full polarimetric SAR satellite sea ice images with manually drawn ice charts. Cryosphere 2013, 7, 1693–1705. [Google Scholar] [CrossRef] [Green Version]
- Joughin, I.R.; Winebrenner, D.P.; Percival, D.B. Probability density functions for multilook polarimetric signatures. IEEE Trans. Geosci. Remote Sens. 1994, 32, 562–574. [Google Scholar] [CrossRef]
- Schuler, D.L.; Lee, J.S.; Hoppel, K.W. Polarimetric SAR image signatures of the ocean and Gulf Stream features. IEEE Trans. Geosci. Remote Sens. 1993, 31, 1210–1221. [Google Scholar] [CrossRef]
- Lee, J.S.; Hoppel, K.W.; Mango, S.A.; Miller, A.R. Intensity and phase statistics of multilook polarimetric and interferometric SAR imagery. IEEE Trans. Geosci. Remote Sens. 1994, 32, 1017–1028. [Google Scholar]
- Guissard, A. Phase calibration of polarimetric radars from slightly rough surfaces. IEEE Trans. Geosci. Remote Sens. 1994, 32, 712–715. [Google Scholar] [CrossRef]
- Nunziata, F.; Gambardella, A.; Migliaccio, M. A unitary Mueller-based view of polarimetric SAR oil slick observation. Int. J. Remote Sens. 2012, 33, 6403–6425. [Google Scholar] [CrossRef]
- Buono, A.; Nunziata, F.; de Macedo, C.R.; Velotto, D.; Migliaccio, M. A sensitivity analysis of the standard deviation of the co-polarized phase difference for sea oil slick observation. IEEE Trans. Geosci. Remote Sens. 2018. [Google Scholar] [CrossRef]
- Nunziata, F.; de Macedo, C.R.; Buono, A.; Velotto, D.; Migliaccio, M. On the analysis of a time series of X-band TerraSAR-X SAR imagery over oil seepages. Int. J. Remote Sens. 2018. in print. [Google Scholar] [CrossRef]
- Lee, J.S.; Pottier, E. Polarimetric Radar Imaging: From Basics to Applications; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Yin, J.; Yang, J.; Zhou, Z.S.; Song, J. The extended Bragg scattering model-based method for ship and oil-spill observation using compact polarimetric SAR. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2015, 8, 3760–3772. [Google Scholar] [CrossRef]
- Buono, A.; Nunziata, F.; Migliaccio, M. Analysis of Full and Compact Polarimetric SAR Features over the Sea Surface. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1527–1531. [Google Scholar] [CrossRef]
- Hajnsek, I.; Pottier, E.; Cloude, S.R. Inversion of surface parameters from polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2003, 41, 727–744. [Google Scholar] [CrossRef]
- Minchew, B.; Jones, C.E.; Holt, B. Polarimetric analysis of backscatter from the Deepwater Horizon oil spill using L-band synthetic aperture radar. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3812–3830. [Google Scholar] [CrossRef]
- EORC JAXA: ALOS Data Users Handbook Rev. C. 2008. Available online: https://www.eorc.jaxa.jp/ALOS/en/doc/fdata/ALOS_HB_RevC_EN.pdf (accessed on 5 October 2018).
- Slade, B. RADARSAT-2 Product Description; Tech. Rep. RN-SP-S2-1238; MDA Ltd.: Richmond, BC, Canada, 2009. [Google Scholar]
- Eineder, M.; Fritz, T. TerraSAR-X Basic Product Specification Document. Technical Report, TX-GS-DD-3302. 2010. Available online: https://www.dlr.de/dlr/Portaldata/1/Resources/documents/TX-GS-DD-3302_Basic-Product-Specification-Document_1_7.pdf (accessed on 18 October 2018).
- Carvalho, D.; Rocha, A.; Gómez-Gesteira, M.; Alvarez, I.; Santos, C.S. Comparison between CCMP, QuikSCAT and buoy winds along the Iberian Peninsula coast. Remote Sens. Environ. 2013, 137, 173–183. [Google Scholar] [CrossRef]
- Gao, G.; Wang, X.; Niu, M. Statistical modeling of the reflection symmetry metric for sea clutter in dual-polarimetric SAR data. IEEE J. Ocean. Eng. 2016, 41, 339–345. [Google Scholar]
- Migliaccio, M.; Nunziata, F.; Montuori, A.; Paes, R.L. Single-look complex COSMO-SkyMed SAR data to observe metallic targets at sea. IEEE J. Sel. Top. Appl. Earth Observ. Remote Sens. 2012, 5, 893–901. [Google Scholar] [CrossRef]
- Atlas, R.; Hoffman, R.N.; Ardizzone, J.; Leidner, S.M.; Jusem, J.C.; Smith, D.K.; Gombos, D. A cross-calibrated, multiplatform ocean surface wind velocity product for meteorological and oceanographic applications. Bull. Am. Met. Soc. 2011, 92, 157–174. [Google Scholar] [CrossRef]
- Verhoef, A.; Stoffelen, A. ASCAT Wind Product User Manual Version 1.15. Document external project: SAF/OSI/CDOP/KNMI/TEC/MA/126; 2018, EUMETSAT. Available online: http://projects.knmi.nl/publications/fulltexts/ss3_pm_ascat_1.15.pdf (accessed on 18 October 2018).
- Mattia, F.; Le Toan, T.; Souyris, J.C.; De Carolis, C.; Floury, N.; Posa, F.; Pasquariello, N. The effect of surface roughness on multifrequency polarimetric SAR data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 954–966. [Google Scholar] [CrossRef]
- Younis, M.; Huber, S.; Patyuchenko, A.; Bordoni, F.; Krieger, G. Performance Comparison of Reflector- and Planar-Antenna Based Digital Beam-Forming SAR. IEEE J. Antennas Propag. 2009, 2009, 614931. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SAR Sensor | UAVSAR | AP | RS | TSX |
|---|---|---|---|---|
| Frequency (GHz) | 1.26 | 1.27 | 5.40 | 9.60 |
| Imaging mode | Full-polarimetric | Full-polarimetric | Full-polarimetric | Dual co-polarimetric |
| Slant range × azimuth resolution (m) | 1.7 × 1.0 | 9.4 × 3.6 | 4.7 × 5.1 | 1.2 × 6.6 |
| Number of scenes | 2 | 4 | 4 | 4 |
| Nominal NESZ (dB) | −53 | −29 | −35 | −22 |
| SAR Data | Ancillary Wind Info | ||||
|---|---|---|---|---|---|
| SAR Sensor | Scene ID | Acquisition Date | AOI Range () | Speed (m/s) | Direction () |
| UAVSAR | 1 | 25/07/2013 | 22.0–27.0 | 4.2 | 115.4 |
| 31.0–35.0 | |||||
| 38.0–42.0 | |||||
| 2 | 22/06/2010 | 22.0–26.0 | 7.1 | 321.0 | |
| 31.0–35.0 | |||||
| 38.0–42.0 | |||||
| AP | 3 | 02/04/2009 | 22.7–25.0 | 3.1 | 232.0 |
| 4 | 20/06/2006 | 22.7–25.0 | 4.9 | 298.6 | |
| 5 | 14/03/2007 | 22.7–25.0 | 7.4 | 332.2 | |
| 6 | 19/03/2009 | 22.7–25.0 | 8.0 | 243.3 | |
| RS | 7 | 31/01/2009 | 22.6–24.2 | 9.0 | 215.1 |
| 8 | 04/05/2010 | 23.4–25.3 | 4.3 | 129.3 | |
| 9 | 26/09/2009 | 31.3–33.0 | 4.7 | 142.9 | |
| 10 | 01/05/2010 | 39.3–40.7 | 12.0 | 331.3 | |
| TSX | 11 | 01/07/2012 | 25.0–26.7 | 4.1 | 1.3 |
| 12 | 05/12/2011 | 25.0–26.7 | 9.2 | 5.1 | |
| 13 | 17/05/2012 | 33.0–34.5 | 3.8 | 168.6 | |
| 14 | 19/06/2012 | 33.0–34.5 | 8.4 | 305.0 | |
| SAR Sensor | ID | AOI () | () | WS (m/s) | () | SNR (dB) | |
|---|---|---|---|---|---|---|---|
| HH | VV | ||||||
| UAVSAR | 1 | 22.0–27.0 | 1.0 ± 0.4 | 4.2 | 9.6 ± 0.8 | 39.0 | 38.7 |
| 31.0–35.0 | 1.1 ± 0.5 | 10.2 ± 0.9 | 35.6 | 35.9 | |||
| 38.0–42.0 | 1.4 ± 0.5 | 10.0 ± 0.7 | 30.1 | 32.1 | |||
| 2 | 22.0–26.0 | 0.7 ± 0.3 | 7.1 | 6.6 ± 0.7 | 38 | 40.3 | |
| 31.0–35.0 | 1.0 ± 0.4 | 7.7 ± 0.7 | 35.7 | 38.7 | |||
| 38.0–42.0 | 1.3 ± 0.5 | 7.5 ± 0.6 | 30.2 | 34.9 | |||
| AP | 3 | 22.7–25.0 | 3.0 ± 1.3 | 3.1 | 8.3 ± 2.0 | 18.7 | 20.3 |
| 4 | 22.7–25.0 | 3.2 ± 1.3 | 4.9 | 8.2 ± 2.0 | 19.3 | 20.3 | |
| 5 | 22.7–25.0 | 3.2 ± 1.4 | 7.4 | 7.3 ± 1.7 | 21.2 | 22.0 | |
| 6 | 22.7–25.0 | 3.0 ± 1.2 | 8.0 | 9.5 ± 2.3 | 20.8 | 21.5 | |
| RS | 7 | 22.6–24.2 | 4.0 ± 2.0 | 9.0 | 5.9 ± 1.7 | 27.8 | 28.2 |
| 8 | 23.4–25.3 | 3.7 ± 1.7 | 4.3 | 6.7 ± 1.9 | 27.4 | 27.8 | |
| 9 | 31.3–33.0 | 5.0 ± 2.3 | 4.7 | 8.4 ± 2.6 | 19.2 | 21.4 | |
| 10 | 39.3–40.7 | 8.0 ± 4.0 | 12.0 | 9.6 ± 3.2 | 14.5 | 18.2 | |
| TSX | 11 | 25.0–26.7 | 8.8 ± 6.4 | 4.1 | – | 9.2 | 9.8 |
| 12 | 25.0–26.7 | 7.4 ± 5.7 | 9.2 | – | 10.2 | 10.4 | |
| 13 | 33.0–34.5 | 18.4 ± 16.5 | 3.8 | – | 2.7 | 3.8 | |
| 14 | 33.0–34.5 | 12.6 ± 10.0 | 8.4 | – | 5.8 | 7.9 | |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buono, A.; De Macedo, C.R.; Nunziata, F.; Velotto, D.; Migliaccio, M. Analysis on the Effects of SAR Imaging Parameters and Environmental Conditions on the Standard Deviation of the Co-Polarized Phase Difference Measured over Sea Surface. Remote Sens. 2019, 11, 18. https://doi.org/10.3390/rs11010018
Buono A, De Macedo CR, Nunziata F, Velotto D, Migliaccio M. Analysis on the Effects of SAR Imaging Parameters and Environmental Conditions on the Standard Deviation of the Co-Polarized Phase Difference Measured over Sea Surface. Remote Sensing. 2019; 11(1):18. https://doi.org/10.3390/rs11010018
Chicago/Turabian StyleBuono, Andrea, Carina Regina De Macedo, Ferdinando Nunziata, Domenico Velotto, and Maurizio Migliaccio. 2019. "Analysis on the Effects of SAR Imaging Parameters and Environmental Conditions on the Standard Deviation of the Co-Polarized Phase Difference Measured over Sea Surface" Remote Sensing 11, no. 1: 18. https://doi.org/10.3390/rs11010018