3.1. Wavelength Calibration
Initial wavelength calibration was based on vendor (JDS Uniphase, now Viavi Solutions)–supplied measurements of the filter transmission, resolving power, and wavelengths (
Table 2). A quadratic fit of the measurements in each filter segment was used to assign initial wavelengths. At the instrument level, measurements were acquired using external (to the chamber) sources to provide distinct line sources. First, a monochromator was used with an uncalibrated IR source to provide multiple orders of light over the full spectral region. The monochromator was also stepped in small wavelength increments (8 to 12 nm) to determine line width, using Gaussian line fits. The monochromator data were supplemented with Hg and Kr/Ar arc lamps and visible lasers at several wavelengths for quick checks of wavelength vs. detector pixel location. Short wavelength measurements were challenging due to blockage by the chamber window and reflectance losses in the coupling system optics, several of which are gold-coated. Thus, wavelengths below 0.5 μm could not be fully characterized.
Flight data from the Earth flyby provided an absolute check on wavelengths below ~2.3 μm, where sufficient signal and spectral features could be identified. Atmospheric lines in these spectra were compared with their known wavelengths using a model atmosphere from MODTRAN [
5]. Fits to identified lines were used to adjust the spectral coverage on a filter-by-filter basis. The measured short wavelength adjustments were then bootstrapped to calibrate the TVAC monochromator data and adjust the longer wavelength values. Final wavelength values for each LVF segment are shown in
Table 2. The filters have a very slight temperature dependence, 5 ppm/K for LVFs 1a, 1b, 3, and 4 and 50 ppm for LVF2, resulting in a negligible shift over the OVIRS operating temperatures (~0.5 nm, much smaller than the required spectral resolution of 7 to 12 nm in this filter).
3.2. Radiometric Calibration
Detector noise response is linear with temperature, providing an overall background level [
3]. Above ~135 K, no signals can be detected due to detector saturation (~60,000 counts). In addition to the background level, some pixels are permanently inoperable or saturated, while others have poor response at higher temperatures, resulting in a temperature-dependent bad-pixel map (BPM). In flight, an onboard BPM is used to exclude these pixels before SP summing. Ideally, different BPMs should be used for the expected detector operating temperature; a cold BPM excludes fewer pixels and could corrupt SP sums if the detector is warm, whereas a warm BPM can exclude good pixels if the detector is cold. In flight, the detector temperatures have consistently been near 105 K, with heating during expected events (such as Earth in the field of view of the passive thermal radiator) up to 115 K and higher. The most conservative 115 K BPM was chosen for use during EGA and beyond, retaining the option to do less onboard summing. Local deep space observations obtained in conjunction with each science observation provide the background level for later removal.
During ground testing, several of the NIST sources were used to calibrate instrument response to an absolute radiance. First, the IR flood source was used to produce blackbody curves at temperatures of 320 K, 340 K, and 360 K; data at 360 K were saturated at long wavelengths. After background frame subtraction, the calculated Planck blackbody radiance curves at these temperatures were used to provide a radiance conversion from measured counts/s to W/cm2/sr/μm for wavelengths greater than 2.5 μm. Similarly, for wavelengths from 0.4 to 1.6 μm, the visible integrating sphere included a Labsphere-provided absolutely calibrated response curve, though with coarse spectral sampling. Many integration times and power settings were used to provide adequate dynamic range at most wavelengths, though the signal was low below 0.5 μm and above 1.5 μm due to optical fiber absorption. Additionally, the optical fibers had OH absorption features and suffered from an epoxy failure that blackened the fibers that potentially affected the source signal. Thus, ground calibration below 1.5 μm was suspect and required flight data for validation. The calibrated chamber sources did not allow for proper validation of the calibration between 1.5 and 2.5 μm, and the predicted instrument response (built up from component-level tests) was used at these wavelengths for the final ground characterization.
In addition to the radiometric coefficients, the IR flood source was used to characterize observed out-of-band leakage at short wavelengths. After background subtraction and radiance calibration, the 320 K, 340 K and 360 K blackbody curves were converted into photon radiance units. To estimate the out-of-band signal, we integrated under the photon radiance curve in LVF4 (2.85 to 4.28 μm) at each temperature using the trapezoidal rule. Blackbody radiances were substituted for the saturated portion of the 360 K curve (above 3.8 μm). A linear fit was then performed to correlate each short wavelength pixel’s out-of-band response with the integrated long-wavelength photon radiance. This value was then subtracted to correct the calibrated radiance spectrum. Although it would be more precise to perform a fit to each filter segment after measuring a variety of known spectral shapes and powers, this was not possible with the available chamber sources. However, the out-of-band effect is small (<0.8%) and is expected only for the hottest asteroid surfaces; these should be most similar to the blackbody curves at 360 K. Thus, the final calibration provides a pixel-by-pixel conversion for all wavelengths from counts/s to W/cm
2/sr/μm:
where
I is corrected radiance,
DN is the measured counts,
B is the background signal,
t is exposure time,
R is the radiometric coefficient,
S is the integrated long-wavelength photon radiance,
OB is the out-of-band coefficient, and
E is the wavelength-dependent photon energy for each pixel (
i,
j). Only wavelengths < 2.2 μm have an OB correction (the value is set to zero otherwise).
During the EGA, thousands of Earth spectra were obtained, as presented in
Table 1, primarily over the ocean, but also over western North America and East Asia, with varying cloud cover. Near-simultaneous data from several Earth-viewing (EV) imagers—Earth Observing System Aqua/Moderate Resolution Imaging Spectroradiometer (MODIS), Suomi-NPP/Visible Infrared Imaging Radiometer Suite (VIIRS), and DSCOVR/Earth Polychromatic Imaging Camera (EPIC)—allowed for a cross-platform radiometry check over multiple overlapping wavelength bands [
6,
7,
8]. These EV imagers are narrowband instruments; therefore, each measurement corresponds to a spectral channel which is a near-box filter over a certain wavelength range. The channels are calibrated using either radiance (IR) or reflectance (VIS, SWIR) space as appropriate, with typical uncertainties of 2% or better [
6,
7,
8]. For each of the EV imager channels, we reported a mean reflectance (or radiance), standard deviation, measurement count, and measurement histogram on a 0.1° resolution lat-lon grid. The histograms were included in order to provide an estimate of scene homogeneity that is more accurate than a standard deviation. As there are many OVIRS spectral elements within a single EV imager bandpass, OVIRS data had to be converted into an effective EV instrument measurement by applying the EV channel spectral response function to the OVIRS spectrum. The resultant effective radiance was then converted to radiance (
Reff) or reflectance (dividing
I by solar flux) for the particular EV channel by integrating over the bandpass:
where
SRFEV is the spectral response function for the EV channel. To correct the OVIRS data, EV data were selected to be close in zenith angle and time, and the OVIRS effective radiance was ratioed to that of the corresponding EV channel. As the OVIRS data were not simultaneous with every EV platform, and there could be residual pointing uncertainties, we focused on clear regions over the ocean to avoid variable cloud cover. We then fit a curve to all the data from the satellites within each of the LVFs (except LVF4 where there are no bands with sufficient signal) and applied that fit as a correction to our radiometric coefficients. It was necessary to fix the values at the ends of each filter segment to ensure the radiances matched.
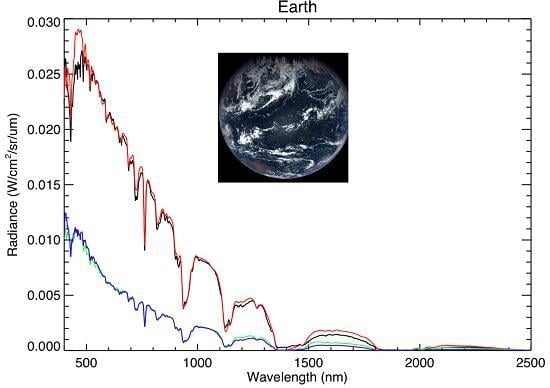
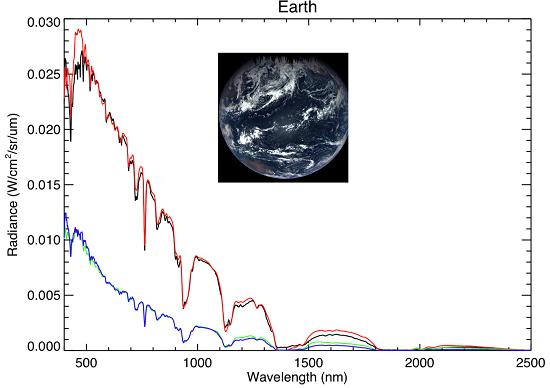
Cross-calibrated Earth spectra are shown in
Figure 2 against MODTRAN models [
5]. The low-reflectance spectrum (blue line) is a reasonable match to a MODTRAN model with no clouds and 11% surface reflectance (green line). The addition of 40% cumulus cloud cover to the MODTRAN model (red line) approximately matches a brighter OVIRS spectrum (black line). The mismatch at the shortest wavelengths results from the fact that the EV imagers have discrete broad passbands relative to the higher spectral resolution of OVIRS, and there were no EV satellite data below ~400 nm. Even a second- or third-order polynomial fit cannot perfectly correct the OVIRS data, as the EV data set did not adequately sample the full wavelength-dependent structure in each OVIRS LVF; we used 11 bands in LVF1a, ten in LVF1b, five in LVF2, and two in LVF3. Further examination of other EV and OVIRS flight data, including solar data, will be used to improve the few remaining mismatches in the future.
3.3. Radiometric Stability and Instrument Performance
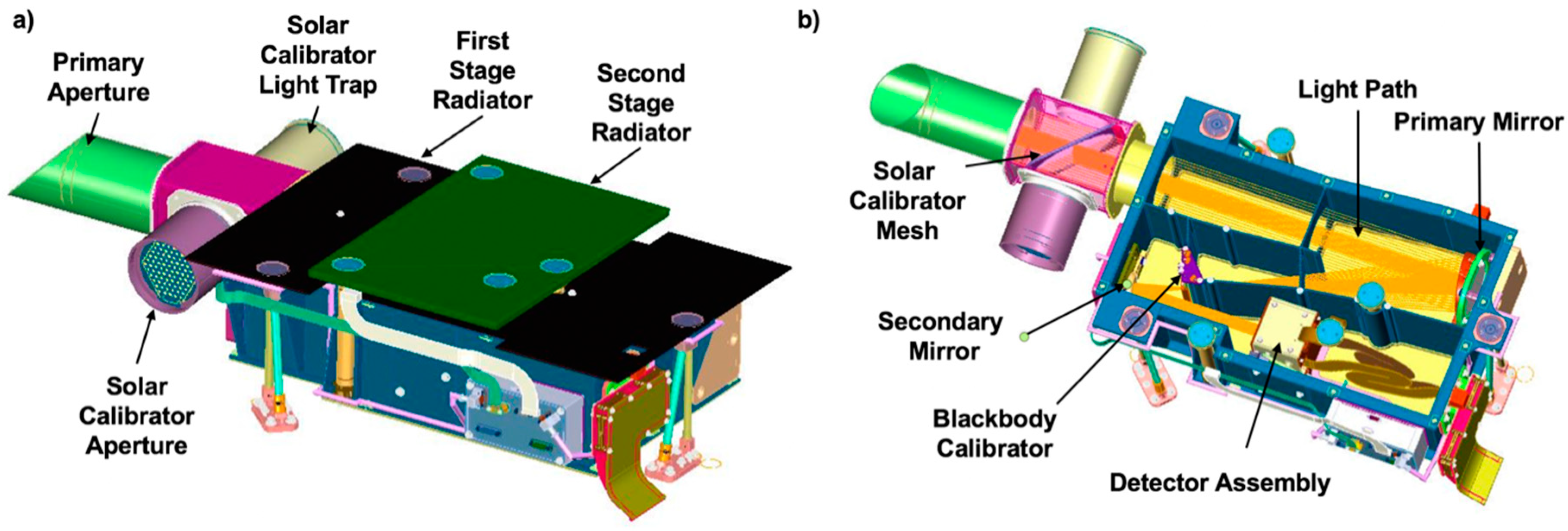
A full set of calibrations are performed about every six months in cruise, as well as around critical activities, to monitor instrument performance in flight. OVIRS uses three in-flight calibration sources: internal blackbodies, internal tungsten lamps, and a solar calibration port. The solar calibration port is designed to approximate the signal level from the asteroid surface, scattering <3% of the solar light into the main optical path. Illuminating the solar calibration port requires slewing the spacecraft, so it is used less frequently to check absolute radiometric performance. The design of the solar calibrator, and separate light path, forms a non-uniform pattern at the detector, and thus it cannot be directly compared to a solar spectrum; this transfer function may be analyzed in the future.
The two internal sources allow for checks of relative performance changes throughout a science observation, as well as long-term trending. Each source is located at a different position along the optical path and has a different spectral response. This distribution allows some diagnostic capability for determining where a potential change may be occurring in the instrument, including the sources themselves. The internal lamps and blackbody sources are activated frequently throughout an observation sequence, when relative radiometric monitoring is needed.
Data acquired after launch were compared with ground data to assess post-launch performance. The only sources useful for trending from TVAC are the internal lamps, as the blackbodies require burn-in after launch and the Sun was not observed before launch. To date, filament performance is identical to ground data, indicating no changes post-launch. After launch, the blackbody burn-in was completed, as well as a check of the solar port pointing direction. Data acquired from these sources are now also monitored for stability and show no radiometric changes over time.
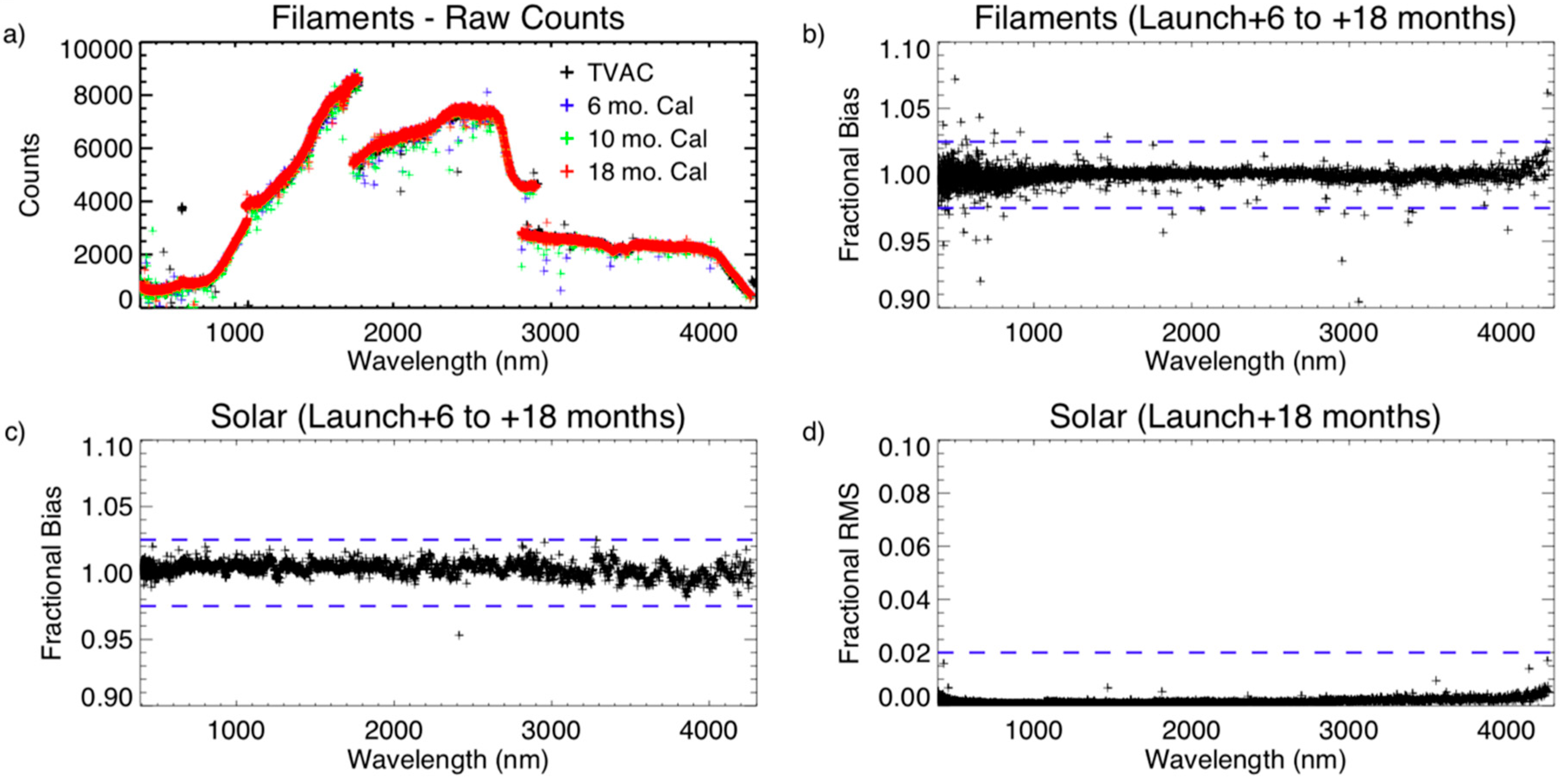
As mentioned above, OVIRS has a requirement for radiometric stability (±2.5%) and SNR performance (>50). Instrument radiometric stability has been stable to better than ±1% from TVAC through EGA, based on filament measurements, as can be seen in
Figure 3.
Figure 3 also shows an example of the measured flight radiometric stability from solar calibrations. As the solar spectra approximate the Bennu signal, the measured SNR of >100 also exceeds the requirement at all wavelengths.

 ,
, 




{kind=link}
{kind=link}
{kind=link}
{kind=link}