Development of Raman Lidar for Remote Sensing of CO2 Leakage at an Artificial Carbon Capture and Storage Site

 ,
, 
Abstract
:1. Introduction
2. Materials and Methods
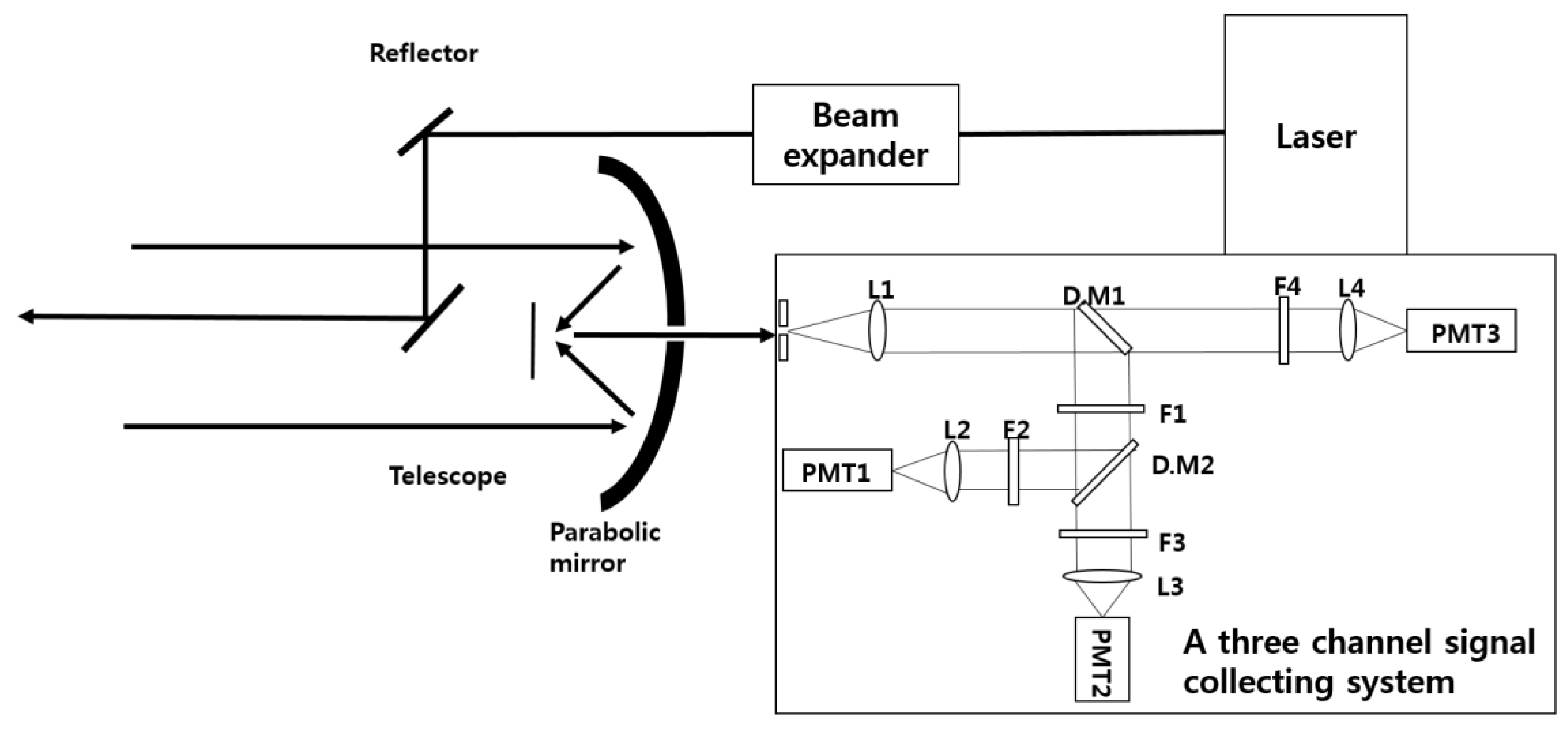
2.1. Raman Lidar Setup
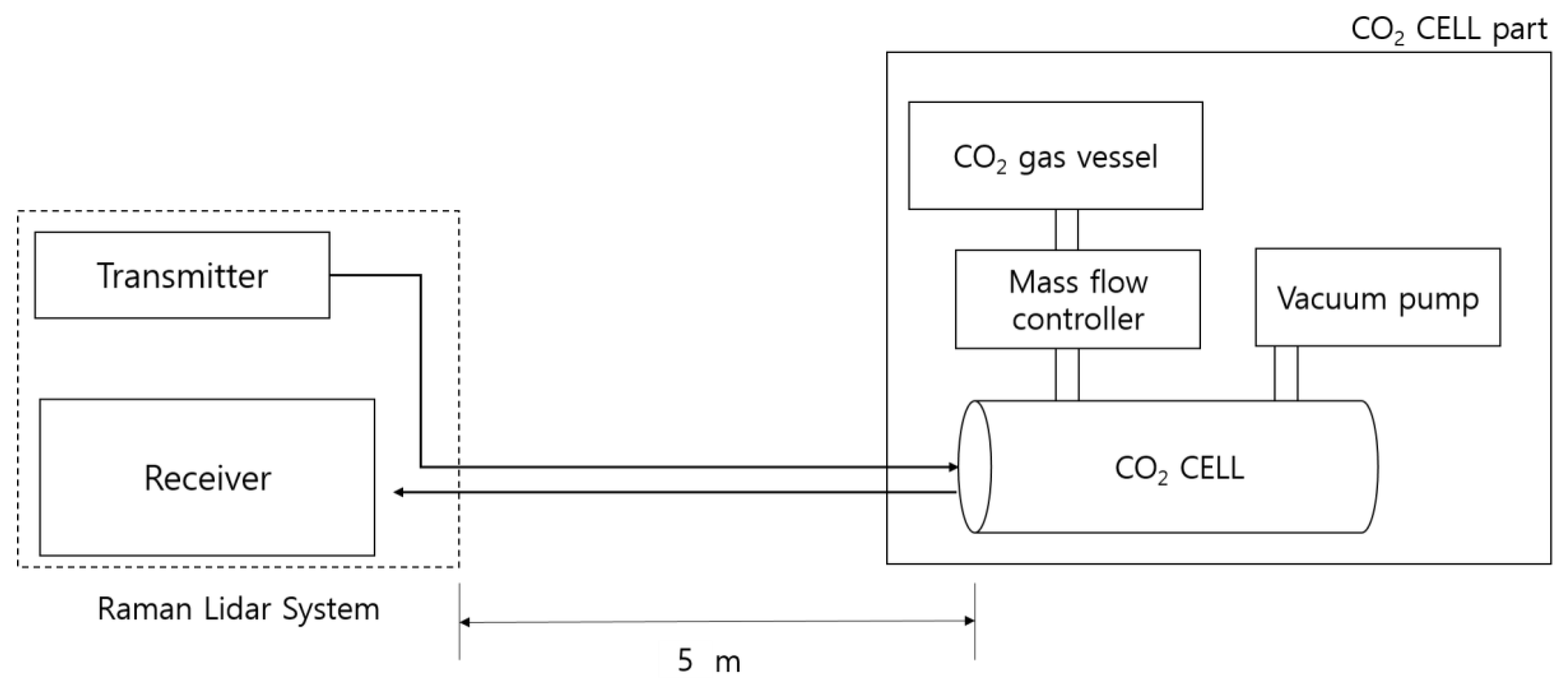
2.2. Indoor CO2 Cell Measurement
3. Results
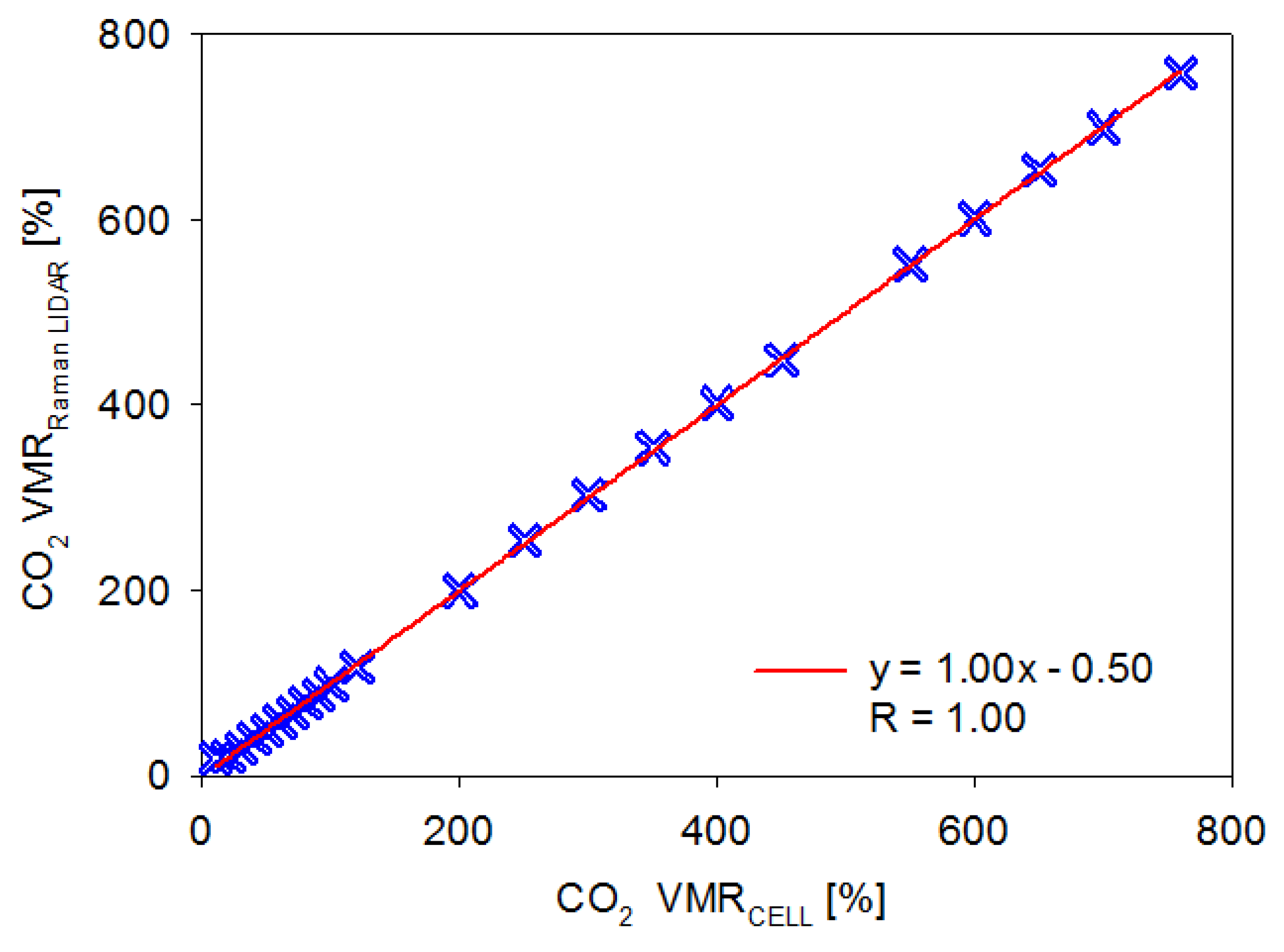
3.1. Indoor CO2 Cell Measurement
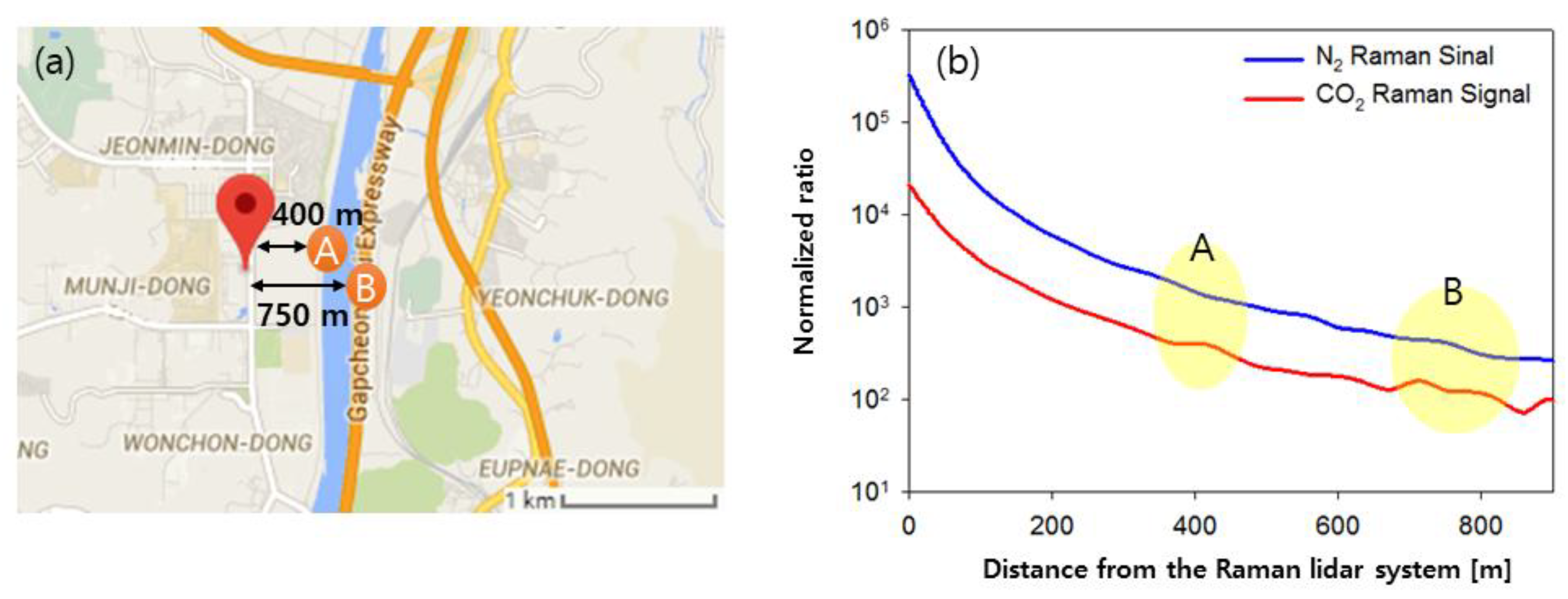
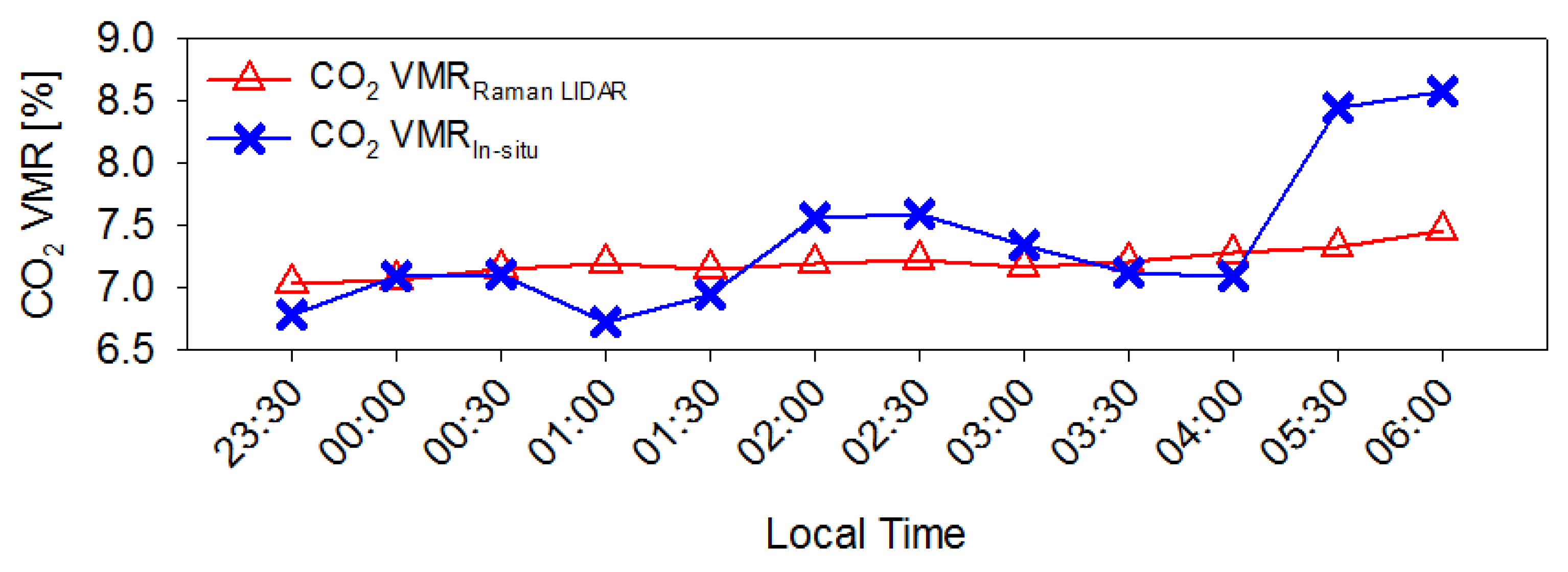
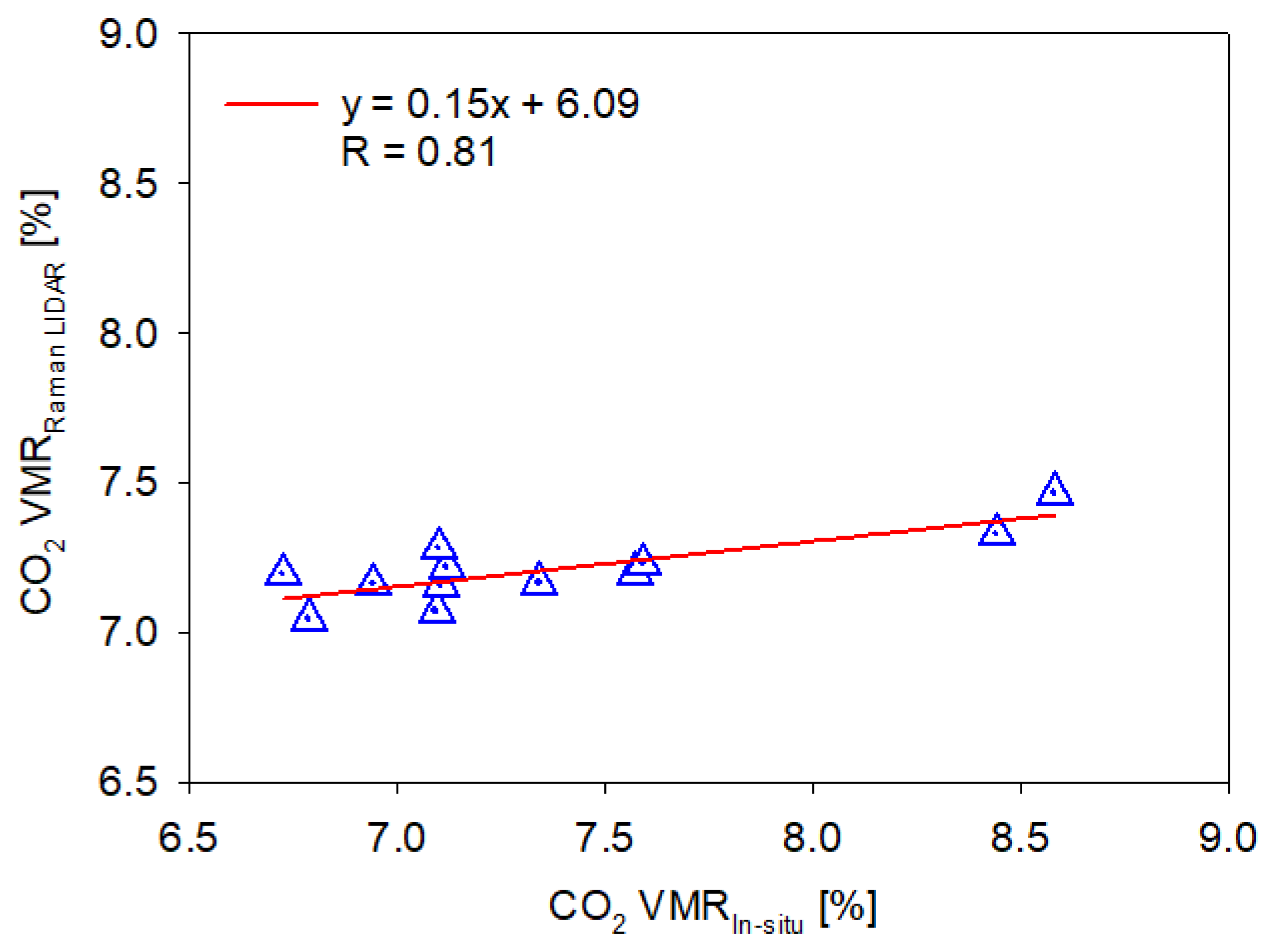
3.2. Field Test
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ko, D.; Yoo, G.; Yun, S.T.; Chung, H. Impacts of CO2 leakage on plants and microorganisms: A review of results from CO2 release experiments and storage sites. Greenh. Gas. Sci. Technol. 2016, 6, 319–338. [Google Scholar] [CrossRef]
- Metz, B. (Ed.) Carbon Dioxide Capture and Storage: Special Report of the Intergovernmental Panel on Climate Change; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- IPCC. Climate Change 2014: Mitigation of Climate Change. Contribution of Working Group III to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change; Edenhofer, O., Pichs-Madruga, R., Sokona, Y., Farahani, E., Kadner, S., Seyboth, K., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2014. [Google Scholar]
- Andrews, A.E.; Kofler, J.D.; Trudeau, M.E.; Williams, J.C.; Neff, D.H.; Masarie, K.A.; Chao, D.Y.; Kitzis, D.R.; Novelli, P.C.; Zhao, C.L.; et al. CO2, CO, and CH 4 measurements from tall towers in the NOAA Earth System Research Laboratory‘s Global Greenhouse Gas Reference Network: Instrumentation, uncertainty analysis, and recommendations for future high-accuracy greenhouse gas monitoring efforts. Atmos. Meas. Tech. 2014, 7, 647–687. [Google Scholar] [CrossRef]
- Grubb, M.; Vrolijk, C.; Brack, D. The Kyoto Protocol: A Guide and Assessment; Royal Institute of International Affairs Energy and Environmental Programme: London, UK, 1997; ISBN 1853835803. [Google Scholar]
- Koornneef, J.; Ramírez, A.; Turkenburg, W.; Faaij, A. The environmental impact and risk assessment of CO2 capture, transport and storage–an evaluation of the knowledge base. Prog. Energy Combust. Sci. 2012, 38, 62–86. [Google Scholar] [CrossRef]
- West, J.M.; Pearce, J.M.; Coombs, P.; Ford, J.R.; Scheib, C.; Colls, J.J.; Smith, K.L.; Steven, M.D. The impact of controlled injection of CO2 on the soil ecosystem and chemistry of an English lowland pasture. Energy Procedia 2009, 1, 1863–1870. [Google Scholar] [CrossRef]
- Yang, H.; Qin, Y.; Feng, G.; Ci, H. Online monitoring of geological CO2 storage and leakage based on wireless sensor networks. IEEE Sensors J. 2013, 13, 556–562. [Google Scholar] [CrossRef]
- Elío, J.; Nisi, B.; Ortega, M.F.; Mazadiego, L.F.; Vaselli, O.; Grandia, F. CO2 soil flux baseline at the technological development plant for CO2 injection at Hontomin (Burgos, Spain). Int. J. Greenh. Gas Control 2013, 18, 224–236. [Google Scholar] [CrossRef] [Green Version]
- Jung, N.H.; Han, W.S.; Watson, Z.T.; Graham, J.P.; Kim, K.Y. Fault-controlled CO2 leakage from natural reservoirs in the Colorado Plateau, East-Central Utah. Earth Planet. Sci. Lett. 2014, 403, 358–367. [Google Scholar] [CrossRef]
- Jun, S.C.; Cheon, J.Y.; Yi, J.H.; Yun, S.T. Controlled release test facility to develop environmental monitoring techniques for geologically stored CO2 in Korea. Energy Procedia 2017, 114, 3040–3051. [Google Scholar] [CrossRef]
- Zhao, P.; Zhang, Y.; Wang, L.; Cao, K.; Su, J.; Hu, S.; Hu, H. Measurement of tropospheric CO2 and aerosol extinction profiles with Raman lidar. Chin. Opt. Lett. 2008, 6, 157–160. [Google Scholar] [CrossRef]
- Stoyanov, D.; Grigorov, I.; Kolarov, G.; Peshev, Z.; Dreischuh, T. LIDAR atmospheric sensing by metal vapor and Nd: YAG lasers. In Advanced Photonic Sciences; InTech: London, UK, 2012. [Google Scholar]
- Whiteman, D.N.; Melfi, S.H.; Ferrare, R.A. Raman lidar system for the measurement of water vapor and aerosols in the Earth’s atmosphere. App. Opt. 1992, 31, 3068–3082. [Google Scholar] [CrossRef] [PubMed]
- Ehleringer, J.R.; Cerling, T.E. Atmospheric CO2 and the ratio of intercellular to ambient CO2 concentrations in plants. Tree Physiol. 1995, 15, 105–111. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Specification |
|---|---|
| Laser | Nd:YAG laser Wavelength: 355 nm Pulse Energy: 80 mJ Beam divergence: <1.5 mrad (full angle) Repetition rate: 20 Hz Pulse duration: 9 ns |
| F1 | Notch filter, 355 nm Spectral Range: 350–1100 nm Nominal Transmission: 1.0% |
| F2 | CO2 Raman (371.7 nm) CWL: 371.7 nm FWHM: 0.5 nm Tabs > 70% @ 371.7 nm (Typical T > 85%) OD > 7 @ 354.7 nm OD > 6 from 200–1200 nm out-of-band |
| F3 | N2 Raman (386.7 nm) FWHM < 0.6 nm OD7 Transmission: 386.7 nm > 80% T Absolute |
| F4 | 355 nm filter CWL: 355 nm FWHM: 10 nm OD > 5 Transmission > 90% |
| PMT1 | CO2 Channel R9880U-210 |
| PMT2 | N2 Channel R9880U-210 |
| PMT3 | 355 nm Channel R9880U-210 |
| Telescope | 6-In. Schmidt Cassegrain |
| Beam expander | 5X, fixed beam-expander |
| Size of the Raman lidar system | 1100 × 850 × 550 mm (W × H × D) |
| Weight of the Raman lidar system | 70 kg |
| Power demand of the Raman lidar system | 1000 W |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Kang, H.; Ryu, J.-Y.; Jun, S.-C.; Yun, S.-T.; Choi, S.; Park, S.; Yoon, M.; Lee, H. Development of Raman Lidar for Remote Sensing of CO2 Leakage at an Artificial Carbon Capture and Storage Site. Remote Sens. 2018, 10, 1439. https://doi.org/10.3390/rs10091439
Kim D, Kang H, Ryu J-Y, Jun S-C, Yun S-T, Choi S, Park S, Yoon M, Lee H. Development of Raman Lidar for Remote Sensing of CO2 Leakage at an Artificial Carbon Capture and Storage Site. Remote Sensing. 2018; 10(9):1439. https://doi.org/10.3390/rs10091439
Chicago/Turabian StyleKim, Daewon, Hyeongwoo Kang, Jea-Yong Ryu, Seong-Chun Jun, Seong-Taek Yun, SungChul Choi, SunHo Park, MoonSang Yoon, and Hanlim Lee. 2018. "Development of Raman Lidar for Remote Sensing of CO2 Leakage at an Artificial Carbon Capture and Storage Site" Remote Sensing 10, no. 9: 1439. https://doi.org/10.3390/rs10091439