Towards Operational Monitoring of Forest Canopy Disturbance in Evergreen Rain Forests: A Test Case in Continental Southeast Asia

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
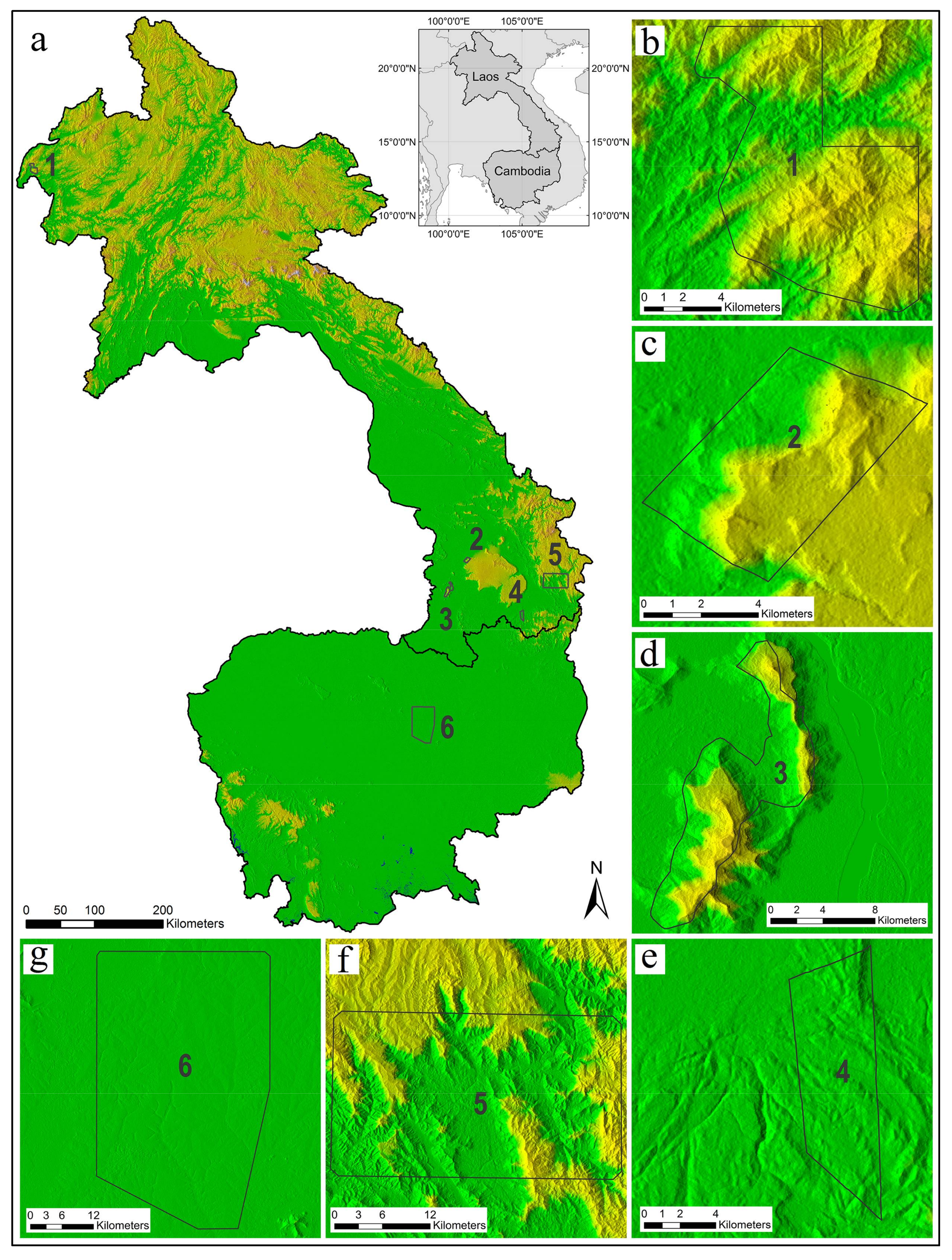
2.1. Study Area, Satellite and Auxiliary Data
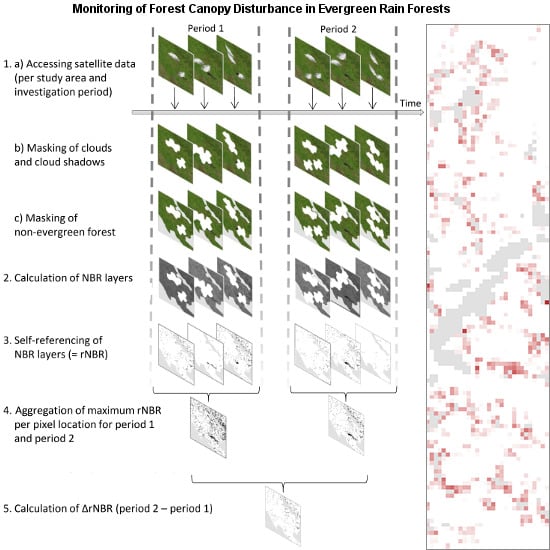
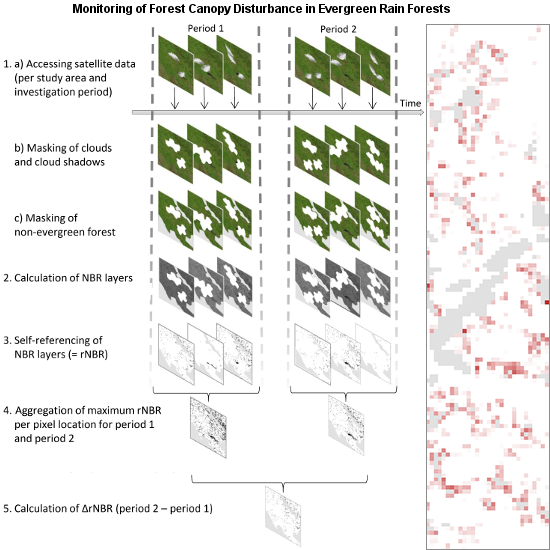
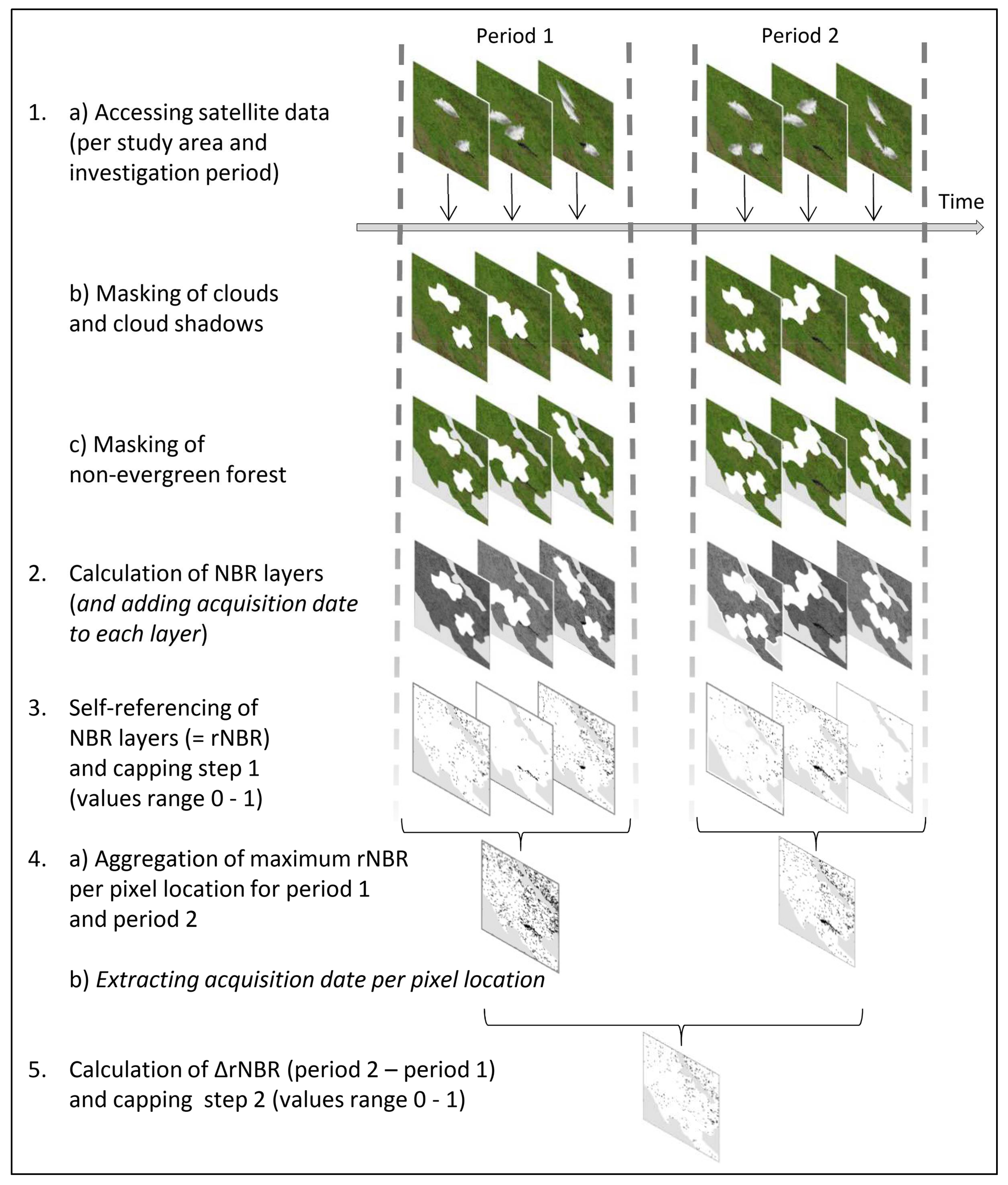
2.2. Methodology for Detecting Crown Cover Disturbance
2.2.1. Masking of All Landsat ToA Scenes
2.2.2. Calculation of NBR for Each Scene
2.2.3. Self-Referencing of Masked NBR Scenes
2.2.4. Temporal Aggregation of Data
2.2.5. Calculation of ΔrNBR
2.3. Validation and Accuracy Assessment
2.3.1. Field Survey
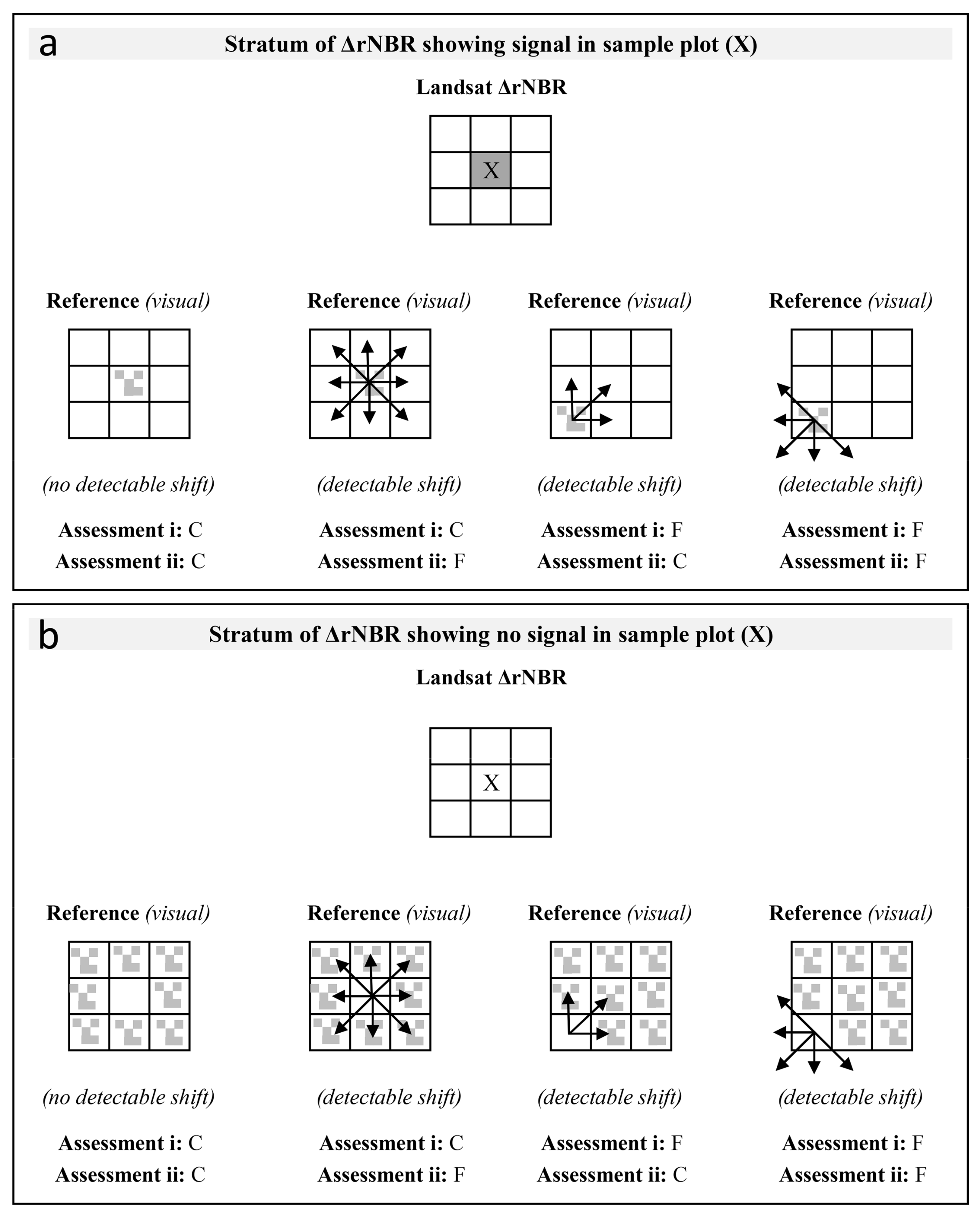
2.3.2. Accuracy Assessment Based on VHR Reference Satellite Imagery
2.3.3. Analysis of the Possible Effects of Topography
3. Results
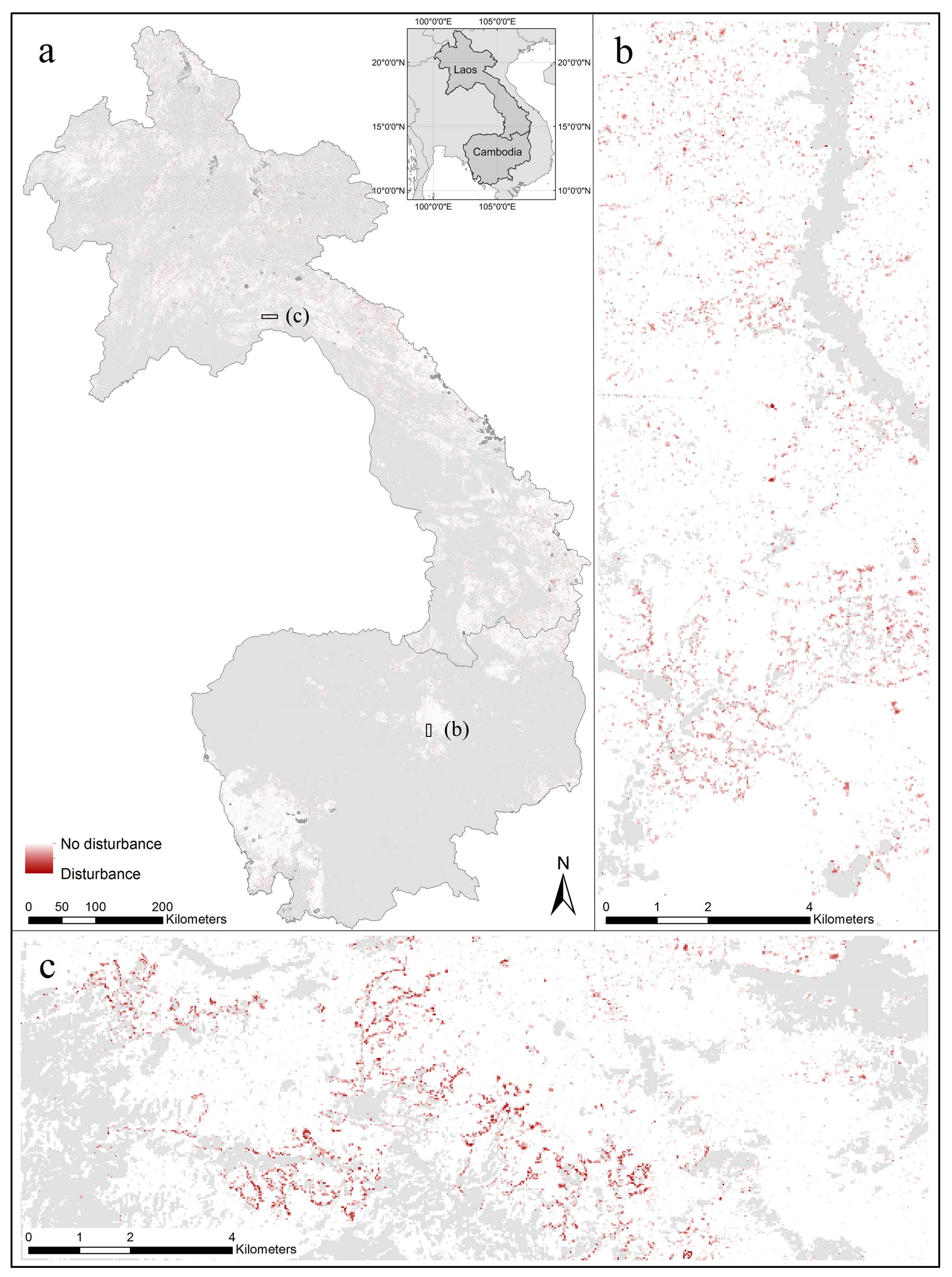
3.1. Country-Scale ΔrNBR Disturbance Maps
3.2. Analysis of Field Plot Data
3.3. Accuracy Assessment Based on VHR Reference Imagery
3.4. Effects of Topography
4. Discussion
4.1. Main Characteristics of the Proposed Approach
4.2. Post-Processing Threshold Setting
4.3. Challenges and Limitations
4.4. Accuracy Assessment and Performance
4.5. Outlook
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Achard, F.; Beuchle, R.; Mayaux, P.; Stibig, H.-J.; Bodart, C.; Brink, A.; Carboni, S.; Desclée, B.; Donnay, F.; Eva, H.D.; et al. Determination of tropical deforestation rates and related carbon losses from 1990 to 2010. Glob. Chang. Biol. 2014, 20, 2540–2554. [Google Scholar] [CrossRef] [PubMed]
- FAO. Global Forest Resources Assessment 2010; FAO: Rome, Italy, 2010; p. 350. ISBN 978-92-5-106654-6. [Google Scholar]
- Asner, G.P.; Knapp, D.E.; Broadbent, E.N.; Oliveira, P.J.C.; Keller, M.; Silva, J.N. Selective logging in the Brazilian Amazon. Science 2005, 310, 480–482. [Google Scholar] [CrossRef] [PubMed]
- Barlow, J.; Lennox, G.D.; Ferreira, J.; Berenguer, E.; Lees, A.C.; Nally, R.M.; Thomson, J.R.; Ferraz, S.F.D.B.; Louzada, J.; Oliveira, V.H.F.; et al. Anthropogenic disturbance in tropical forests can double biodiversity loss from deforestation. Nature 2016, 535, 144–147. [Google Scholar] [CrossRef] [PubMed]
- ITTO. ITTO Guidelines for the Restoration, Management and Rehabilitation of Degraded and Secondary Tropical Forests; ITTO Policy Development Series No 13; ITTO, CIFOR, FAO, IUCN, WWF International: Yokohama, Japan, 2002. [Google Scholar]
- Potapov, P.; Hansen, M.C.; Laestadius, L.; Turubanova, S.; Yaroshenko, A.; Thies, C.; Smith, W.; Zhuravleva, I.; Komarova, A.; Minnemeyer, S.; et al. The last frontiers of wilderness: Tracking loss of intact forest landscapes from 2000 to 2013. Sci. Adv. 2017, 3, e1600821. [Google Scholar] [CrossRef] [PubMed]
- Souza, C.M.; Siqueira, J.V.; Sales, M.H.; Fonseca, A.V.; Ribeiro, J.G.; Numata, I.; Cochrane, M.A.; Barber, C.P.; Roberts, D.A.; Barlow, J. Ten-Year Landsat Classification of Deforestation and Forest Degradation in the Brazilian Amazon. Remote Sens. 2013, 5, 5493–5513. [Google Scholar] [CrossRef]
- Brinck, K.; Fischer, R.; Groeneveld, J.; Lehmann, S.; Dantas De Paula, M.; Pütz, S.; Sexton, J.O.; Song, D.; Huth, A. High resolution analysis of tropical forest fragmentation and its impact on the global carbon cycle. Nat. Commun. 2017, 8. [Google Scholar] [CrossRef] [PubMed]
- Harris, N.L.; Brown, S.; Hagen, S.C.; Saatchi, S.S.; Petrova, S.; Salas, W.; Hansen, M.C.; Potapov, P.V.; Lotsch, A. Baseline map of carbon emissions from deforestation in tropical regions. Science 2012, 336, 1573–1576. [Google Scholar] [CrossRef] [PubMed]
- Pearson, T.R.H.; Brown, S.; Murray, L.; Sidman, G. Greenhouse gas emissions from tropical forest degradation: An underestimated source. Carbon Balance Manag. 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- FCPF. Carbon Fund Methodological Framework. 2016. Available online: https://www.forestcarbonpartnership.org/sites/fcp/files/2016/July/FCPF%20Carbon%20Fund%20Methodological%20Framework%20revised%202016.pdf (accessed on 27 March 2018).
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef] [PubMed]
- Langner, A.; Miettinen, J.; Siegert, F. Land cover change 2002–2005 in Borneo and the role of fire derived from MODIS imagery. Glob. Chang. Biol. 2007, 13, 2329–2340. [Google Scholar] [CrossRef]
- Miettinen, J.; Shi, C.; Liew, S.C. Deforestation rates in insular Southeast Asia between 2000 and 2010. Glob. Chang. Biol. 2011, 17, 2261–2270. [Google Scholar] [CrossRef]
- DeFries, R.; Achard, F.; Brown, S.; Herold, M.; Murdiyarso, D.; Schlamadinger, B.; de Souza, C. Earth observations for estimating greenhouse gas emissions from deforestation in developing countries. Environ. Sci. Policy 2007, 10, 385–394. [Google Scholar] [CrossRef]
- Miettinen, J.; Stibig, H.-J.; Achard, F. Remote sensing of forest degradation in Southeast Asia-Aiming for a regional view through 5–30 m satellite data. Glob. Ecol. Conserv. 2014, 2, 24–36. [Google Scholar] [CrossRef]
- GOFC-GOLD. A Sourcebook of Methods and Procedures for Monitoring and Reporting Anthropogenic Greenhouse Gas Emissions and Removals Associated with Deforestation, Gains and Losses of Carbon Stocks in Forests Remaining Forests, and Forestation; GOFC-GOLD Report Version COP22-1; GOFC-GOLD Land Cover Project Office: Wageningen, The Netherlands, 2016. [Google Scholar]
- Ballhorn, U.; Siegert, F.; Mason, M.; Limin, S. Derivation of burn scar depths and estimation of carbon emissions with LIDAR in Indonesian peatlands. Proc. Natl. Acad. Sci. USA 2009, 106, 21213–21218. [Google Scholar] [CrossRef] [PubMed]
- Jubanski, J.; Ballhorn, U.; Kronseder, K.; Franke, J.; Siegert, F. Detection of large above-ground biomass variability in lowland forest ecosystems by airborne LiDAR. Biogeosciences 2013, 10, 3917–3930. [Google Scholar] [CrossRef]
- Goetz, S.; Dubayah, R. Advances in remote sensing technology and implications for measuring and monitoring forest carbon stocks and change. Carbon Manag. 2011, 2, 231–244. [Google Scholar] [CrossRef]
- Asner, G.P.; Powell, G.V.N.; Mascaro, J.; Knapp, D.E.; Clark, J.K.; Jacobson, J.; Kennedy-Bowdoin, T.; Balaji, A.; Paez-Acosta, G.; Victoria, E.; et al. High-resolution forest carbon stocks and emissions in the Amazon. Proc. Natl. Acad. Sci. USA 2010, 107, 16738–16742. [Google Scholar] [CrossRef] [PubMed]
- Asner, G.P.; Clark, J.K.; Mascaro, J.; Galindo García, G.A.; Chadwick, K.D.; Navarrete Encinales, D.A.; Paez-Acosta, G.; Cabrera Montenegro, E.; Kennedy-Bowdoin, T.; Duque, Á.; et al. High-resolution mapping of forest carbon stocks in the Colombian Amazon. Biogeosciences 2012, 9, 2683–2696. [Google Scholar] [CrossRef]
- Herold, M.; Román-Cuesta, R.M.; Mollicone, D.; Hirata, Y.; Van Laake, P.; Asner, G.P.; Souza, C.; Skutsch, M.; Avitabile, V.; MacDicken, K. Options for monitoring and estimating historical carbon emissions from forest degradation in the context of REDD+. Carbon Balance Manag. 2011, 6. [Google Scholar] [CrossRef] [PubMed]
- Mitchell, A.L.; Rosenqvist, A.; Mora, B. Current remote sensing approaches to monitoring forest degradation in support of countries measurement, reporting and verification (MRV) systems for REDD+. Carbon Balance Manag. 2017, 12. [Google Scholar] [CrossRef] [PubMed]
- Saatchi, S.; Houghton, R.A.; Dos Santos Alvalá, R.C.; Soares, J.V.; Yu, Y. Distribution of aboveground live biomass in the Amazon basin. Glob. Chang. Biol. 2007, 13, 816–837. [Google Scholar] [CrossRef]
- Shimabukuro, Y.E.; Smith, J.A. The Least-Squares Mixing Models to Generate Fraction Images Derived From Remote Sensing Multispectral Data. IEEE Trans. Geosci. Remote Sens. 1991, 29, 16–20. [Google Scholar] [CrossRef]
- Adams, J.B.; Sabol, D.E.; Kapos, V.; Almeida Filho, R.; Roberts, D.A.; Smith, M.O.; Gillespie, A.R. Classification of multispectral images based on fractions of endmembers: Application to land-cover change in the Brazilian Amazon. Remote Sens. Environ. 1995, 52, 137–154. [Google Scholar] [CrossRef]
- Shimabukuro, Y.E.; Batista, G.T.; Mello, E.M.K.; Moreira, J.C.; Duarte, V. Using shade fraction image segmentation to evaluate deforestation in Landsat Thematic Mapper images of the Amazon region. Int. J. Remote Sens. 1998, 19, 535–541. [Google Scholar] [CrossRef]
- Asner, G.P.; Keller, M.; Pereira, R.; Zweede, J.C.; Silva, J.N.M. Canopy Damage and Recovery after Selective Logging in Amazonia: Field and Satellite Studies. Ecol. Appl. 2004, 14, 280–298. [Google Scholar] [CrossRef]
- Negrón-Juárez, R.I.; Chambers, J.Q.; Marra, D.M.; Ribeiro, G.H.P.M.; Rifai, S.W.; Higuchi, N.; Roberts, D. Detection of subpixel treefall gaps with Landsat imagery in Central Amazon forests. Remote Sens. Environ. 2011, 115, 3322–3328. [Google Scholar] [CrossRef]
- Shimabukuro, Y.E.; Beuchle, R.; Grecchi, R.C.; Achard, F. Assessment of forest degradation in Brazilian Amazon due to selective logging and fires using time series of fraction images derived from Landsat ETM+ images. Remote Sens. Lett. 2014, 5, 773–782. [Google Scholar] [CrossRef]
- Grecchi, R.C.; Beuchle, R.; Shimabukuro, Y.E.; Aragão, L.E.O.C.; Arai, E.; Simonetti, D.; Achard, F. An integrated remote sensing and GIS approach for monitoring areas affected by selective logging: A case study in northern Mato Grosso, Brazilian Amazon. Int. J. Appl. Earth Obs. Geoinf. 2017, 61, 70–80. [Google Scholar] [CrossRef] [PubMed]
- Souza, C.M.; Roberts, D.A.; Cochrane, M.A. Combining spectral and spatial information to map canopy damage from selective logging and forest fires. Remote Sens. Environ. 2005, 98, 329–343. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Steinegger, M.; Gallaun, H.; Schardt, M. Mapping Forest Degradation due to Selective Logging by Means of Time Series Analysis: Case Studies in Central Africa. Remote Sens. 2014, 6, 756–775. [Google Scholar] [CrossRef]
- Carlotto, M.J. Reducing the effects of space-varying, wavelength-dependent scattering in multispectral imagery. Int. J. Remote Sens. 1999, 20, 3333–3344. [Google Scholar] [CrossRef]
- Asner, G.P.; Knapp, D.E.; Broadbent, E.N.; Oliveira, P.J.C.; Keller, M.; Silva, J.N. Supporting Online Material for Selective Logging in the Brazilian Amazon. Science 2005, 310, 480–482. [Google Scholar] [CrossRef] [PubMed]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring the vernal advancement and retrogradation (green wave effect) of natural vegetation. Prog. Rep. RSC 1973, 112. Available online: https://ntrs.nasa.gov/search.jsp?R=19740022555 (accessed on 27 March 2018).
- Gao, B.C. NDWI–A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Karnieli, A.; Kaufman, Y.J.; Remer, L.; Wald, A. AFRI-aerosol free vegetation index. Remote Sens. Environ. 2001, 77, 10–21. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. Measuring and Remote Sensing of Burn Severity: The CBI and NBR. In Proceedings Joint Fire Science Conference and Workshop; University of Idaho and International Association of Wildland Fire: Moscow, ID, USA, 1999; p. 284. [Google Scholar]
- Matricardi, E.A.T.; Skole, D.L.; Pedlowski, M.A.; Chomentowski, W.; Fernandes, L.C. Assessment of tropical forest degradation by selective logging and fire using Landsat imagery. Remote Sens. Environ. 2010, 114, 1117–1129. [Google Scholar] [CrossRef]
- Miura, T.; Huete, A.R.; van Leeuwen, W.J.D.; Didan, K. Vegetation detection through smoke-filled AVIRIS images: An assessment using MODIS band passes. J. Geophys. Res. 1998, 103, 32001–32011. [Google Scholar] [CrossRef]
- Souza, C.M., Jr.; Roberts, D.A.; Monteiro, A.L. Multitemporal analysis of degraded forests in the southern Brazilian Amazon. Earth Interact. 2005, 9, 1–25. [Google Scholar] [CrossRef]
- Souza, C., Jr.; Firestone, L.; Silva, L.M.; Roberts, D. Mapping forest degradation in the Eastern Amazon from SPOT 4 through spectral mixture models. Remote Sens. Environ. 2003, 87, 494–506. [Google Scholar] [CrossRef]
- Shimizu, K.; Ponce-Hernandez, R.; Ahmed, O.S.; Ota, T.; Chi Win, Z.; Mizoue, N.; Yoshida, S. Using Landsat time series imagery to detect forest disturbance in selectively logged tropical forests in Myanmar. Can. J. For. Res. 2017, 47, 289–296. [Google Scholar] [CrossRef]
- Kennedy, R.E.; Yang, Z.; Cohen, W.B. Detecting trends in forest disturbance and recovery using yearly Landsat time series: 1. LandTrendr—Temporal segmentation algorithms. Remote Sens. Environ. 2010, 114, 2897–2910. [Google Scholar] [CrossRef]
- Grogan, K.; Pflugmacher, D.; Hostert, P.; Kennedy, R.; Fensholt, R. Cross-border forest disturbance and the role of natural rubber in mainland Southeast Asia using annual Landsat time series. Remote Sens. Environ. 2015, 169, 438–453. [Google Scholar] [CrossRef]
- Key, C.H.; Benson, N.C. Landscape assessment (LA): Sampling and analysis methods. In General Technical Report RMRS-GTR-164-CD; USDA Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2006; pp. 1–55. [Google Scholar]
- Asner, G.P.; Knapp, D.E.; Balaji, A.; Páez-Acosta, G. Automated mapping of tropical deforestation and forest degradation: CLASlite. J. Appl. Remote Sens. 2009, 3, 33543. [Google Scholar] [CrossRef]
- Langner, A.; Miettinen, J.; Stibig, H.-J. Monitoring Forest Degradation for a Case Study in Cambodia—Comparison of Landsat 8 and Sentinel-2 imagery. In Proceedings of the Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016; European Space Agency: Paris, France, 2016; Volume SP-740, pp. 1–4. [Google Scholar]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Peel, M.C.; Finlayson, B.L.; McMahon, T.A. Updated world map of the Köppen-Geiger climate classification. Hydrol. Earth Syst. Sci. 2007, 11, 1633–1644. [Google Scholar] [CrossRef]
- Stibig, H.-J.; Belward, A.S.; Roy, P.S.; Rosalina-Wasrin, U.; Agrawal, S.; Joshi, P.K.; Beuchle, R.; Fritz, S.; Mubareka, S.; Giri, C. A land-cover map for South and Southeast Asia derived from SPOT-VEGETATION data. J. Biogeogr. 2007, 34, 625–637. [Google Scholar] [CrossRef]
- Stibig, H.-J.; Achard, F.; Carboni, S.; Raši, R.; Miettinen, J. Change in tropical forest cover of Southeast Asia from 1990 to 2010. Biogeosciences 2014, 11, 247–258. [Google Scholar] [CrossRef]
- Vancutsem, C.; Achard, F. Mapping Disturbances in Tropical Humid Forests over the Past 33 Years. In World Cover 2017; ESA-ESRIN: Frascati, Italy, 2017. [Google Scholar]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Zhu, Z.; Woodcock, C.E. Object-based cloud and cloud shadow detection in Landsat imagery. Remote Sens. Environ. 2012, 118, 83–94. [Google Scholar] [CrossRef]
- Langner, A.J. Monitoring Tropical Forest Degradation and Deforestation in Borneo, Southeast Asia. 2009. Available online: https://edoc.ub.uni-muenchen.de/9953/1/Langner_Andreas.pdf (accessed on 27 March 2018).
- Perreault, S.; Hébert, P. Median Filtering in Constant Time. IEEE Trans. Image Process. 2007, 16, 2389–2394. [Google Scholar] [CrossRef] [PubMed]
- Gallego, J.; Sannier, C.; Pennec, A.; Dufourmont, H. Validation of Copernicus Land Monitoring Services and Area Estimation. In Proceedings of the ICAS VII Seventh International Conference on Agricultural Statistics, Rome, Italy, 26–28 October 2016; pp. 1–7. [Google Scholar]
- Stehman, S.V.; Foody, G.M. Accuracy Assessment. In The SAGE Handbook of Remote Sensing; Warner, T.A., Nellis, M.D., Foody, G.M., Eds.; SAGE Publications Inc.: Thousand Oaks, CA, USA, 2008; pp. 1–481, ISBN 9781412936163. [Google Scholar]
- Blair, D.C. Information Retrieval, 2nd ed. C.J. Van Rijsbergen. London: Butterworths; 1979: 208 pp. Price: $32.50; Wiley Subscription Services, Inc.: Hoboken, NJ, USA, 1979; Volume 30. [Google Scholar]
- Bodart, C.; Eva, H.; Beuchle, R.; Raši, R.; Simonetti, D.; Stibig, H.-J.; Brink, A.; Lindquist, E.; Achard, F. Pre-processing of a sample of multi-scene and multi-date Landsat imagery used to monitor forest cover changes over the tropics. ISPRS J. Photogramm. Remote Sens. 2011, 66, 555–563. [Google Scholar] [CrossRef]
- Steele, B.M.; Patterson, D.A.; Redmond, R.L. Toward estimation of map accuracy without a probability test sample. Environ. Ecol. Stat. 2003, 10, 333–356. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Site | Country (Province) | Size in ha | Reference Scene 1 | Acquisition Date 1 | Reference Scene 2 | Acquisition Date 2 |
|---|---|---|---|---|---|---|
| 1 | Laos (Bokeo) | 10,472 | Pleiades | 23 November 2015 | Pleiades | 7 February 2017 |
| 2 | Laos (Champasak) | 3979 | Pleiades | 31 January 2016 | WorldView-2 | 19 February 2017 |
| 3 | Laos (Champasak) | 9672 | Pleiades | 25 January 2016/7 February 2016 | Pleiades | 22 January 2017/2 March 2017 |
| 4 | Laos (Attapeu) | 5517 | WorldView-2 | 2 January 2015 | GeoEye-1 | 14 February 2017 |
| 5 | Laos (Attapeu) | 75,157 | RapidEye | 14 February 2014 | RapidEye | 14 January 2015 |
| 6 | Cambodia (Kampong Thom) | 156,934 | RapidEye | 15 April 2014 | RapidEye | 30 March 2015 |
| Test Site | Country (Province) | Landsat Start Period 1 | Landsat End Period 1 | Landsat Start Period 2 | Landsat End Period 2 | Number Scenes |
|---|---|---|---|---|---|---|
| 1 | Laos (Bokeo) | 24 November 2014 | 23 November 2015 | 24 November 2015 | 5 March 2017 | 46 |
| 2 | Laos (Champasak) | 1 February 2015 | 31 January 2016 | 1 February 2016 | 5 February 2017 | 43 |
| 3 | Laos (Champasak) | 26 January 2015 | 25 January 2016 | 26 January 2016 | 5 February 2017 | 81 |
| 4 | Laos (Attapeu) | 3 January 2014 | 2 January 2015 | 3 January 2015 | 14 February 2017 | 61 |
| 5 | Laos (Attapeu) | 11 April 2013 | 14 February 2014 | 15 February 2014 | 25 January 2015 | 65 |
| 6 | Cambodia (Kampong Thom) | 16 April 2013 | 15 April 2014 | 16 April 2014 | 21 April 2015 | 39 |
| Site | SPS | F1 | OA | PA | UA | |
|---|---|---|---|---|---|---|
| Assessment over all four VHR sites | ||||||
| 1–4 (i) | D | 4404 ha | 0.54701 | 73.2% | 45.8% | 67.8% |
| N | 14,084 ha | 88.2% | 74.9% | |||
| 1–4 (ii) | D | 4404 ha | 0.61452 | 77.7% | 52.2% | 74.6% |
| N | 14,084 ha | 90.8% | 78.7% | |||
| Assessment per single VHR site | ||||||
| 1 (i) | D | 1062 ha | 0.45375 | 70.9% | 34.6% | 66.0% |
| N | 4736 ha | 90.4% | 72.0% | |||
| 1 (ii) | D | 1062 ha | 0.50513 | 72.7% | 37.8% | 76.0% |
| N | 4736 ha | 93.0% | 72.0% | |||
| 2 (i) | D | 660 ha | 0.57300 | 69.7% | 46.7% | 74.0% |
| N | 1737 ha | 87.3% | 68.0% | |||
| 2 (ii) | D | 660 ha | 0.69016 | 78.8% | 57.6% | 86.0% |
| N | 1737 ha | 93.5% | 76.0% | |||
| 3 (i) | D | 1712 ha | 0.58241 | 78.7% | 54.9% | 62.0% |
| N | 5446 ha | 87.6% | 84.0% | |||
| 3 (ii) | D | 1712 ha | 0.63309 | 82.3% | 62.6% | 64.0% |
| N | 5446 ha | 88.6% | 88.0% | |||
| 4 (i) | D | 971 ha | 0.59311 | 67.7% | 48.6% | 76.0% |
| N | 2165 ha | 85.6% | 64.0% | |||
| 4 (ii) | D | 971 ha | 0.68172 | 75.7% | 57.4% | 84.0% |
| N | 2165 ha | 90.9% | 72.0% | |||
| Site | SPS | F1 | OA | PA | UA | |
|---|---|---|---|---|---|---|
| 5 (i) | D | 4186 ha | 0.43807 | 86.8% | 31.7% | 71.0% |
| N | 53,425 ha | 97.5% | 88.0% | |||
| 5 (ii) | D | 4186 ha | 0.49067 | 88.8% | 36.7% | 74.0% |
| N | 53,425 ha | 97.8% | 90.0% | |||
| 6 (i) | D | 4709 ha | 0.31675 | 85.0% | 19.5% | 84.0% |
| N | 108,744 ha | 99.2% | 85.0% | |||
| 6 (ii) | D | 4709 ha | 0.38189 | 88.0% | 24.3% | 89.0% |
| N | 108,744 ha | 99.5% | 88.0% | |||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Langner, A.; Miettinen, J.; Kukkonen, M.; Vancutsem, C.; Simonetti, D.; Vieilledent, G.; Verhegghen, A.; Gallego, J.; Stibig, H.-J. Towards Operational Monitoring of Forest Canopy Disturbance in Evergreen Rain Forests: A Test Case in Continental Southeast Asia. Remote Sens. 2018, 10, 544. https://doi.org/10.3390/rs10040544
Langner A, Miettinen J, Kukkonen M, Vancutsem C, Simonetti D, Vieilledent G, Verhegghen A, Gallego J, Stibig H-J. Towards Operational Monitoring of Forest Canopy Disturbance in Evergreen Rain Forests: A Test Case in Continental Southeast Asia. Remote Sensing. 2018; 10(4):544. https://doi.org/10.3390/rs10040544
Chicago/Turabian StyleLangner, Andreas, Jukka Miettinen, Markus Kukkonen, Christelle Vancutsem, Dario Simonetti, Ghislain Vieilledent, Astrid Verhegghen, Javier Gallego, and Hans-Jürgen Stibig. 2018. "Towards Operational Monitoring of Forest Canopy Disturbance in Evergreen Rain Forests: A Test Case in Continental Southeast Asia" Remote Sensing 10, no. 4: 544. https://doi.org/10.3390/rs10040544
APA StyleLangner, A., Miettinen, J., Kukkonen, M., Vancutsem, C., Simonetti, D., Vieilledent, G., Verhegghen, A., Gallego, J., & Stibig, H.-J. (2018). Towards Operational Monitoring of Forest Canopy Disturbance in Evergreen Rain Forests: A Test Case in Continental Southeast Asia. Remote Sensing, 10(4), 544. https://doi.org/10.3390/rs10040544