1. Introduction
With precise satellite orbit and clock corrections, precise point positioning (PPP) can provide decimeter- to centimeter-level kinematic positioning results directly referenced to the global reference frame. Such positioning does not require a dense reference network and has proven to be a powerful tool in a number of applications, such as those pertaining to geophysics and meteorology [
1,
2]. Integer carrier-phase ambiguity resolution (IAR) is important to shorten the initialization time and improve the precision of traditional PPP. In contrast to relative positioning, because only one receiver is involved in PPP, the uncalibrated phase delay (UPD) will be absorbed by the ambiguity estimates, which makes it impossible to fix the ambiguities to integers [
3]. UPDs must therefore be separated from precise satellite clock products and applied in PPP to fix the ambiguities. Mervart et al. [
4] proposed a phase-only method for PPP-IAR. Ge et al. [
5] estimated the single-difference between-receiver wide-lane (WL) and narrow-lane (NL) frequency code biases (FCBs), achieving PPP-IAR over a global network. Later, Collins et al. [
6] and Laurichesse et al. [
7] used satellite clock estimates to absorb the un-differenced (UD) NL FCBs. In contrast, Bertiger et al. [
8] delivered all UD ambiguity estimates that contain the FCBs to users for PPP ambiguity resolution. The traditional PPP model requires a few tens of minutes to get the first ambiguity-fixed solution [
9]. In Network Real-Time Kinematic (NRTK) positioning, because atmospheric delays can be modeled precisely, rapid ambiguity resolution can be achieved. Li et al. [
10] showed that if one uses precise atmospheric delays to augment PPP IAR, instantaneous PPP IAR can be also achieved. Even for Galileo and BeiDou, which do not have complete constellations, initial results of PPP-IAR have already been obtained, in [
11,
12]. Additionally, Liu et al. [
13] showed that using GPS + BeiDou can significantly improve the fixing percentage of GPS-only PPP. Meanwhile, Globalnaya Navigatsionnaya Sputnikovaya Sistema (GLONASS), which was declared fully operational globally with 24 satellites at the end of 2011, still faces obstacles to realizing PPP-IAR, owing to its frequency-division-multiple-access signals.
Currently, the 24-satellite constellation of GLONASS uses 14 frequency channels, and only satellites at antipodal slots of an orbital plane can share the same frequency. Commonly tracked GLONASS satellites thus have slightly different frequencies, which produces both inter-frequency code bias (IFCB) and inter-frequency phase bias (IFPB) [
14,
15,
16]. Generally, GLONASS IFPB is a linear function of frequency, which can be calibrated with the model given in [
16] or estimated in real time [
17]. The IFCB behaves abnormally, varying not only with receiver type but also possibly antennas, domes, and firmware. Currently, there is no general model to correct IFCB [
15,
18,
19,
20,
21]. Although IFCBs have little effect on short-baseline differential ambiguity resolution [
16,
20,
22], they totally undermine ambiguity resolution in PPP, because PPP relies on the Hatch–Melbourne–Wübbena (HMW) combination [
23,
24,
25] of code and carrier phase observations to resolve WL ambiguity. The presence of IFCB results in a biased WL ambiguity estimation, thereby causing PPP ambiguity resolution to fail.
Liu et al. [
26] used a network of homogeneous receivers to perform GLONASS UPD estimation and PPP-IAR, obtaining a preliminary result for GLONASS-only static PPP. Banville [
27] formed an ionosphere-free combination with wavelength ~5 cm for GLONASS PPP ambiguity resolution. However, very limited improvements were achieved in shortening the initialization time for kinematic PPP-IAR, owing to the relatively short wavelength. Reussner and Wanninger [
15] proposed the use of a precise ionospheric model to directly fix WL ambiguity with the WL combination of L1 and L2 carrier-phase observations. However, this method depends on a precise ionospheric delay model (precise enough to fix the WL ambiguity with a wavelength of ~86 cm), which devalues its application. Geng and Bock [
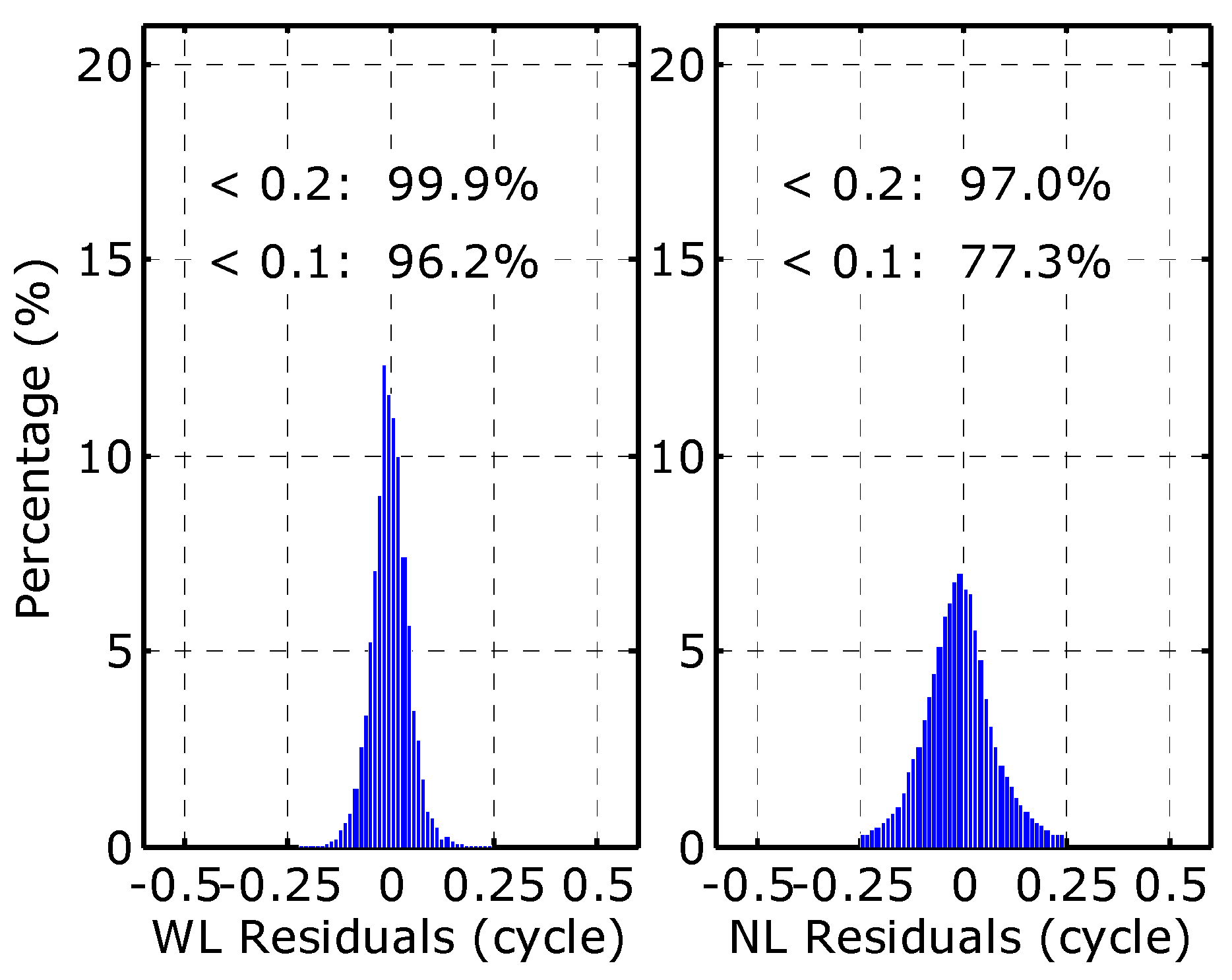
28] adopted this idea and found that 92.4% of all fractional parts of GLONASS WL ambiguities agreed well within ±0.15 cycles, but the efficiency of PPP-IAR for GLONASS is lower than that for the GPS; only 63% of hourly solutions were fixed for GLONASS while 97% were fixed for the GPS. Geng and Shi [
29] used a regional network of receivers with mutual separation 300 km to calculate ionospheric corrections to aid this method. Results showed that the GPS + GLONASS fixing percentage with observation length 10 min could be improved to 87.50%. Yi et al. [
30] calibrated the odd cycle in the HMW combination to achieve GLONASS PPP-IAR, showing that the positioning accuracy of GPS + GLONASS PPP could be improved substantially after ambiguity fixing. Liu et al. [
31] compared WL phase-combination-based GLONASS PPP-IAR with HMW-combination-based GLONASS PPP-IAR, proposing that the HMW-based method is independent of the ionosphere model and therefore far superior to the latter over large areas, where one cannot obtain a precise ionosphere model.
According to the reviews in the previous paragraphs, it is still a challenge to resolve the GLONASS PPP ambiguity with heterogeneous receivers. In the present study, we propose a method for calibrating GLONASS P1/P2 IFCBs to achieve PPP-IAR using the HMW method over heterogeneous rover receivers. The proposed method is validated first with the same dataset of homogeneous receivers used by Liu et al. [
31] as a reference, to check its efficiency. We then use a network of mixed receivers in France to examine their efficiency over heterogeneous receivers. The remainder of the paper is organized as follows. We first describe the method for UPD estimation at the server. We then introduce the proposed method for GLONASS IFCB estimation in detail. We use a network of homogeneous receivers and a network of heterogeneous receivers to validate the method. Finally, discussion and concluding remarks are presented based on our findings.
2. Methods
After correcting the IFPB with a linear model [
16], the code and phase observations of frequency
can be written as
where
and
denote a satellite and receiver respectively, and
and
are code and carrier phase observations with corresponding wavelength
and frequency
.
is the nondispersive delay that includes geometric delay, tropospheric delay, satellite and receiver clock biases, and any other delay that affects all observations identically. The quotient
denotes the slant ionospheric delay,
the integer ambiguity, and
the code IFB. Finally,
and
denote un-modeled code and carrier phase errors including multipath effects and noise. The phase center correction and phase windup effect [
32] must be considered in modeling. To eliminate the first-order ionosphere delay, the well-known ionospheric-free (IF) combination is usually used for PPP [
2]:
where
;
and
. The related float ionosphere-free ambiguity
is usually expressed as the combination of WL and NL integer ambiguities and their UPDs:
where
and
are the integer WL and NL ambiguities, respectively, with corresponding wavelengths
and
.
and
are the receiver and satellite NL UPDs, respectively.
2.1. GLONASS UPD Estimation Strategy
The NL code and WL carrier phase observation can be defined as
where
is the NL IFCB (in meters) and
is the WL ambiguity with corresponding wavelength
. Thus, we obtain the WL ambiguity as
with
where
and
are the receiver and satellite WL UPDs, respectively.
is the receiver WL IFCB (in cycles).
According to Equation (6), the existence of the receiver-and-satellite-dependent WL IFCB will undermine the WL UPD estimation [
15,
26]. If we use receivers with identical IFCBs, the WL IFCB for a particular satellite will be the same for all involved receivers and can be absorbed into the satellite UPD estimates. Equation (5) can thus be rewritten as
where
. With this reformulation, we have eliminated the effect of the receiver WL IFCB, and GLONASS PPP ambiguity fixing can therefore be carried out in a straightforward manner. According to Equations (3) and (7), GLONASS un-differenced WL and NL UPDs can be generated with the strategy proposed in [
7].
2.2. Rover IFCB Correction Method
Equation (7) shows that the estimated WL UPD contains the IFCB of the reference stations, and is thus only be suitable for receivers with the same IFCB. Otherwise, we must correct the IFCB difference with respect to the reference stations. As a result of the ionosphere delay, we propose the two-step correction method described in the following.
2.2.1. Correcting the Large Part
Given a receiver to be calibrated, we can select the nearest reference station to ensure the largest number of commonly observed satellites. We can then write the between-station-differenced NL code observation and the IF code and carrier phase observation equations as
where
represents the single difference between stations.
and
denote the NL and IF IFCB difference with respect to the reference station. In the first and second equations of (8), the IFCB parameters strongly depend on the corresponding receiver clocks, so we add a zero-mean constraint on all NL and IF IFCB estimates.
We obtain the NL and IF IFCB corrections by daily static baseline processing using (8). Since we have used homogeneous receivers as the reference stations, one can select three or more surrounding reference stations to estimate the IFCB and use average values. With the NL and IF IFCB estimates, we can attain the P1 and P2 IFCB corrections:
Because of the residual ionosphere delays that have not been eliminated, the estimated IFCB correction is biased and it is not possible to fix the WL ambiguities. We thus need to further refine the IFCB estimates.
2.2.2. Correcting the Fractional Part
We first process daily static PPP using the WL and NL UPD products generated from the reference stations. The estimated WL and NL ambiguities have been corrected with the satellite UPD products. The P1 and P2 IFCB corrections have also been applied to the code observations. Therefore, considering the IFCB residuals, the WL ambiguity can be expressed as
where
represents the residual WL IFCB. Not that, the integer part is not separable from the integer ambiguity, thus we only have to further estimate the fractional part of the residual WL IFCB.
Assuming that m GLONASS satellites can be observed and there are two continuous tracking arcs for each satellite, and we have fixed all WL ambiguities in Equation (10), we then get
where
and
represent the float WL ambiguities for the two arcs of satellite m, and
and
are for the fixed integers. Given Equation (11), the WL IFCB residuals can be estimated in a least-squares manner. The WL ambiguity fixing procedure is described as follows.
- (a)
Select the ambiguity with the longest tracking arc, assume the WL IFCB residual is zero for the satellite, and fix the WL and NL ambiguities by rounding. The receiver UPD can thus be separated from all WL and NL float ambiguities.
- (b)
Select another WL and NL ambiguity pair. First round down the WL ambiguity and if the corresponding NL ambiguity can be fixed, fix the WL ambiguity as the rounded-down value. If not, round up the WL ambiguity and if the corresponding NL ambiguity can be fixed, fix the WL ambiguity as the rounded-up value.
- (c)
Repeat (b) for all remaining WL and NL ambiguity pairs.
After obtaining the accurate fractional part of the WL IFCB correction, we can get the NL IFCB correction with (6), which can be used to correct the initial value obtained via (8) and get the final P1 and P2 IFCB estimates using (9). Although we only estimate the fractional part of the residual WL IFCB, Equation (9) reveals that the P1 and P2 IFCB estimates both satisfy the WL ambiguity resolution and the high-precision of IF code observation. Thus, the proposed IFCB calibration method will not be affected by the ionospheric residuals, so we do not need a dense reference network.
3. Data and Processing Strategy
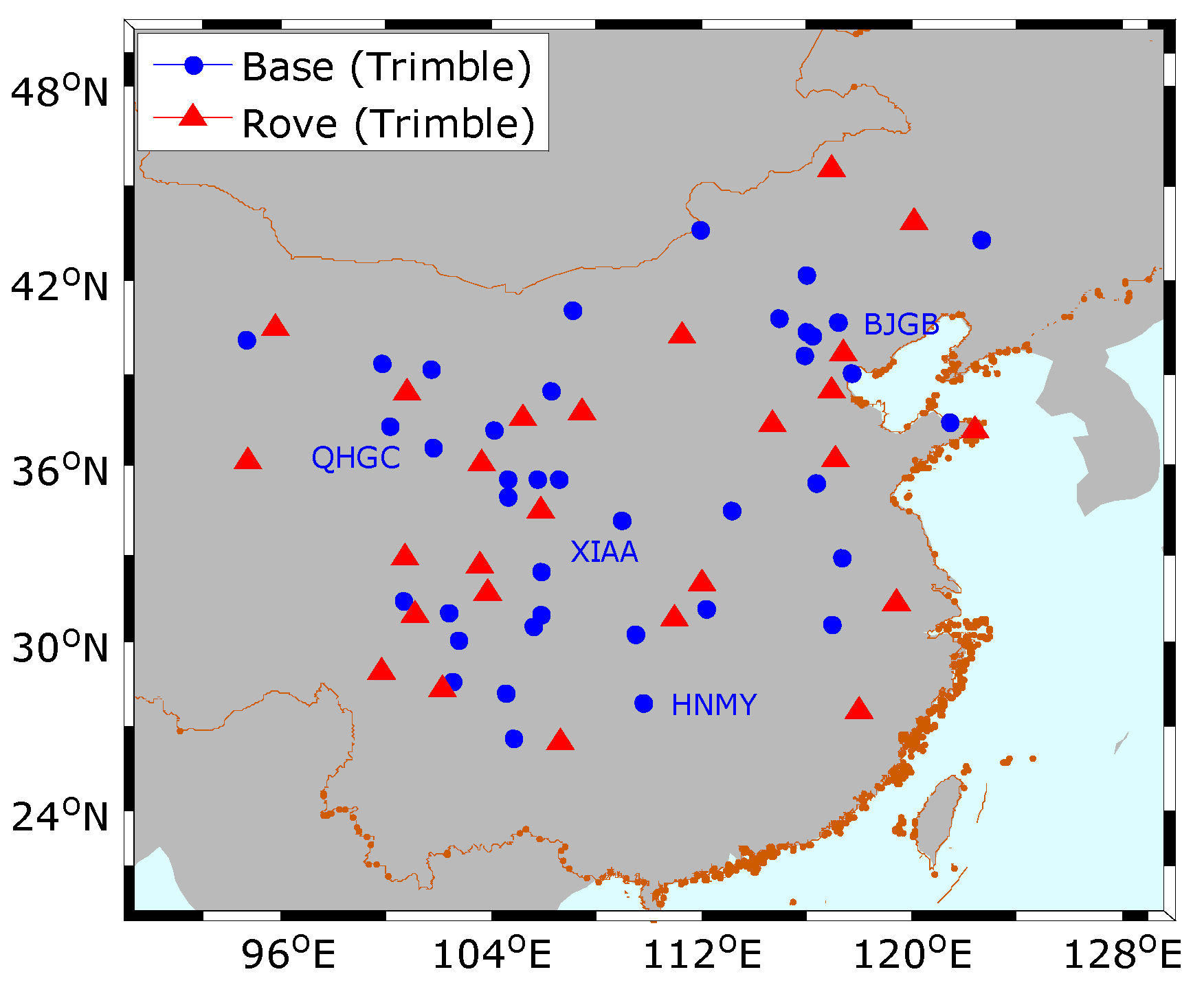
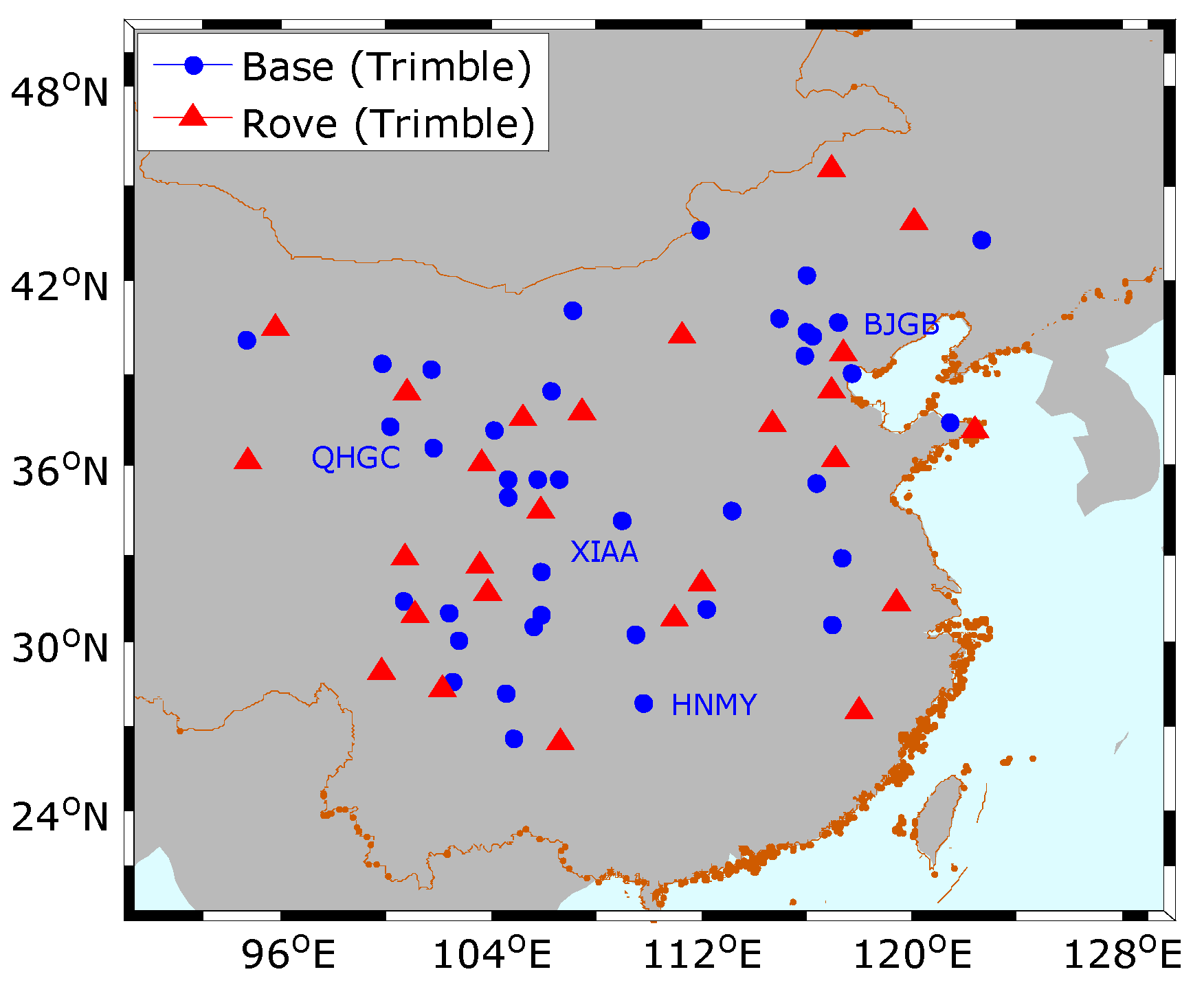
We first assessed the proposed method using 66 stations with identical hardware configurations from the Crustal Movement Observation Network of China [
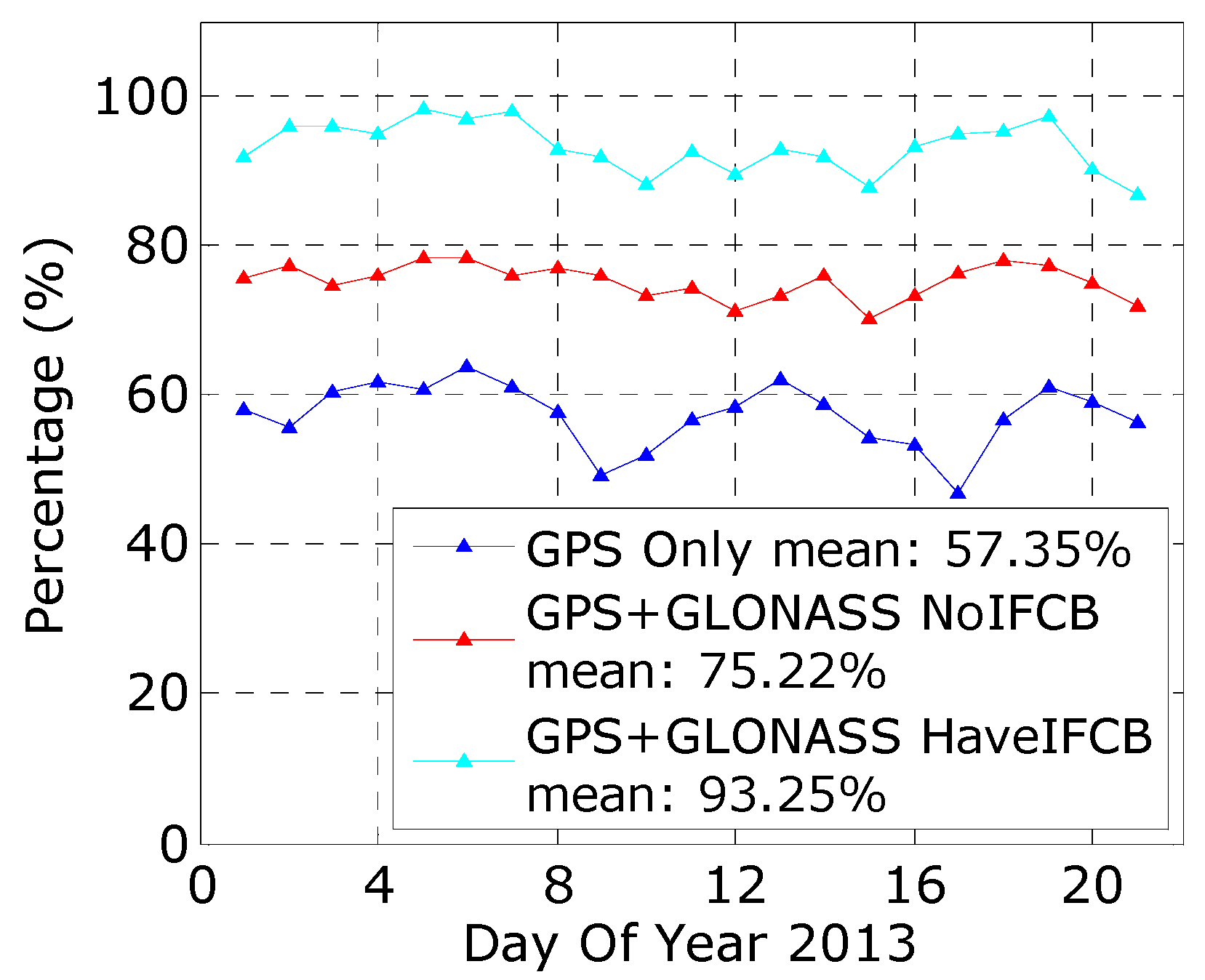
26]. All these stations are equipped with the same receiver (Trimble NetR8, Sunnyvale, California, USA) and antenna (TRM59800.00 SCIS, Sunnyvale, California, USA) types. Therefore, after neglecting the unit variations, we can assume that these receivers have comparable code IFB, and GLONASS PPP-IAR can thus be performed without considering IFCB corrections. This allows a control-group experiment to assess the proposed IFCB estimation strategy. Three weeks (covering days of year (DOY) 1–21 in 2013) of data collected at sampling interval 30 s were processed. 26 stations were used as base stations to generate the UPD products and the remaining 40 stations were used as rover stations to perform PPP-IAR.
Figure 1 shows the distribution of these stations.
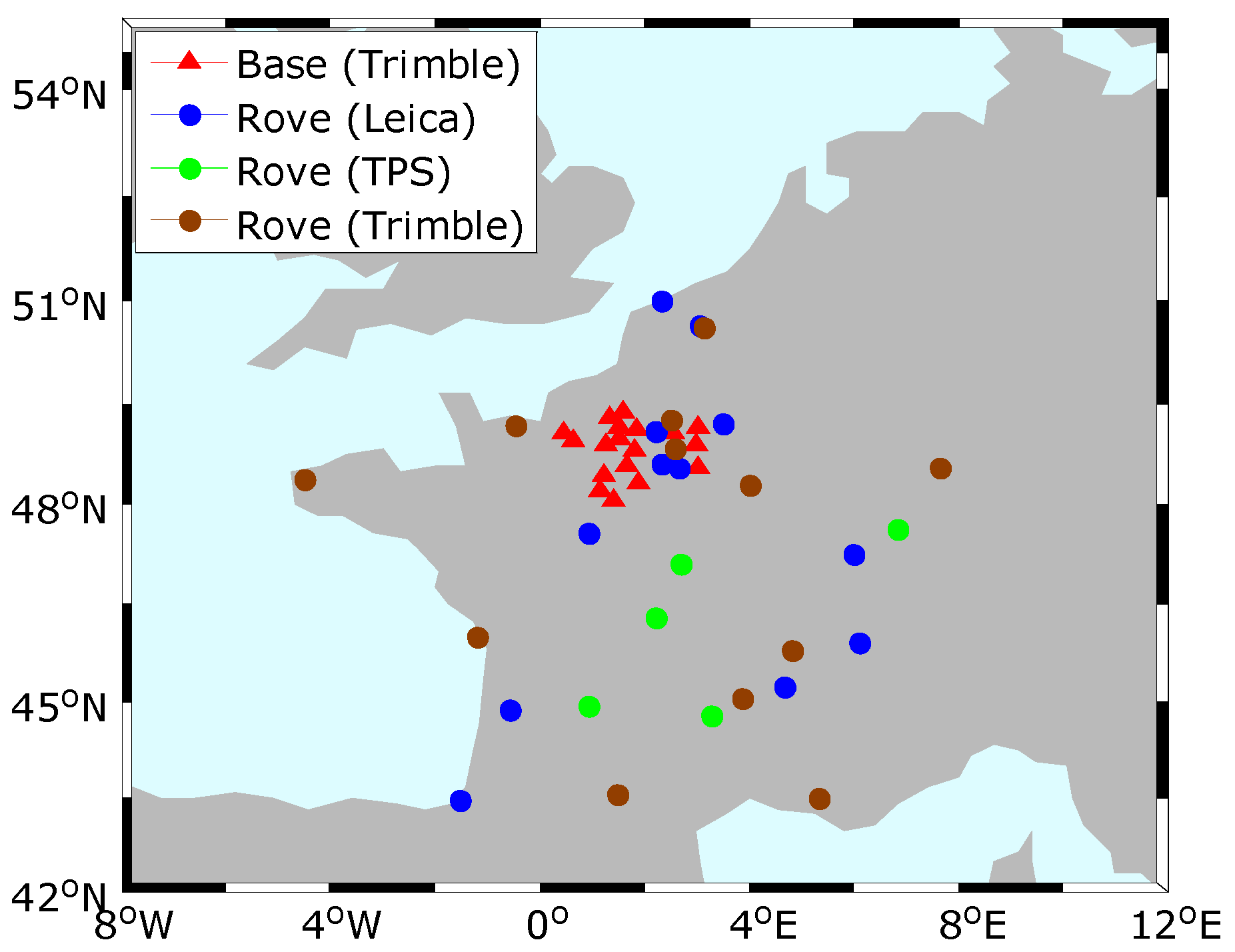
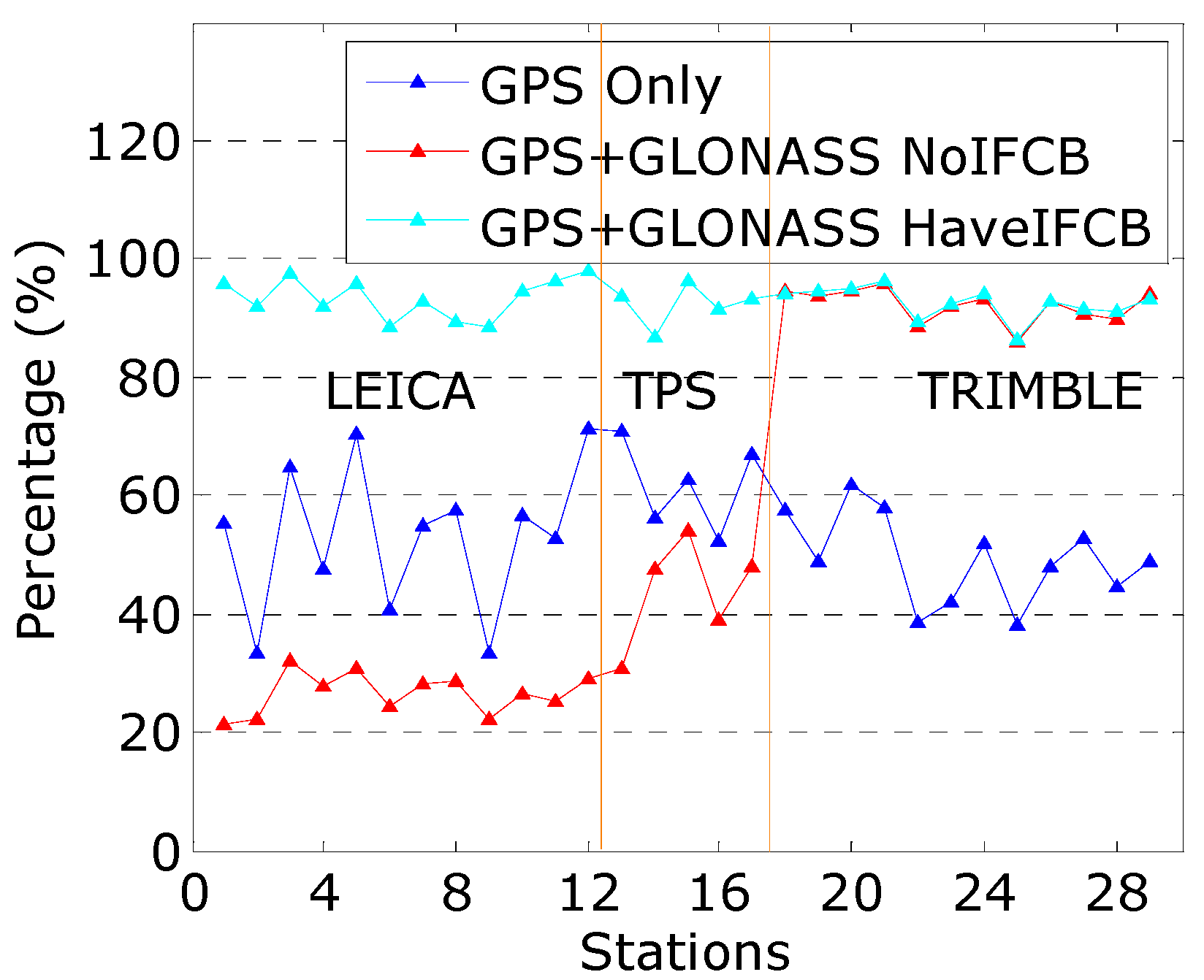
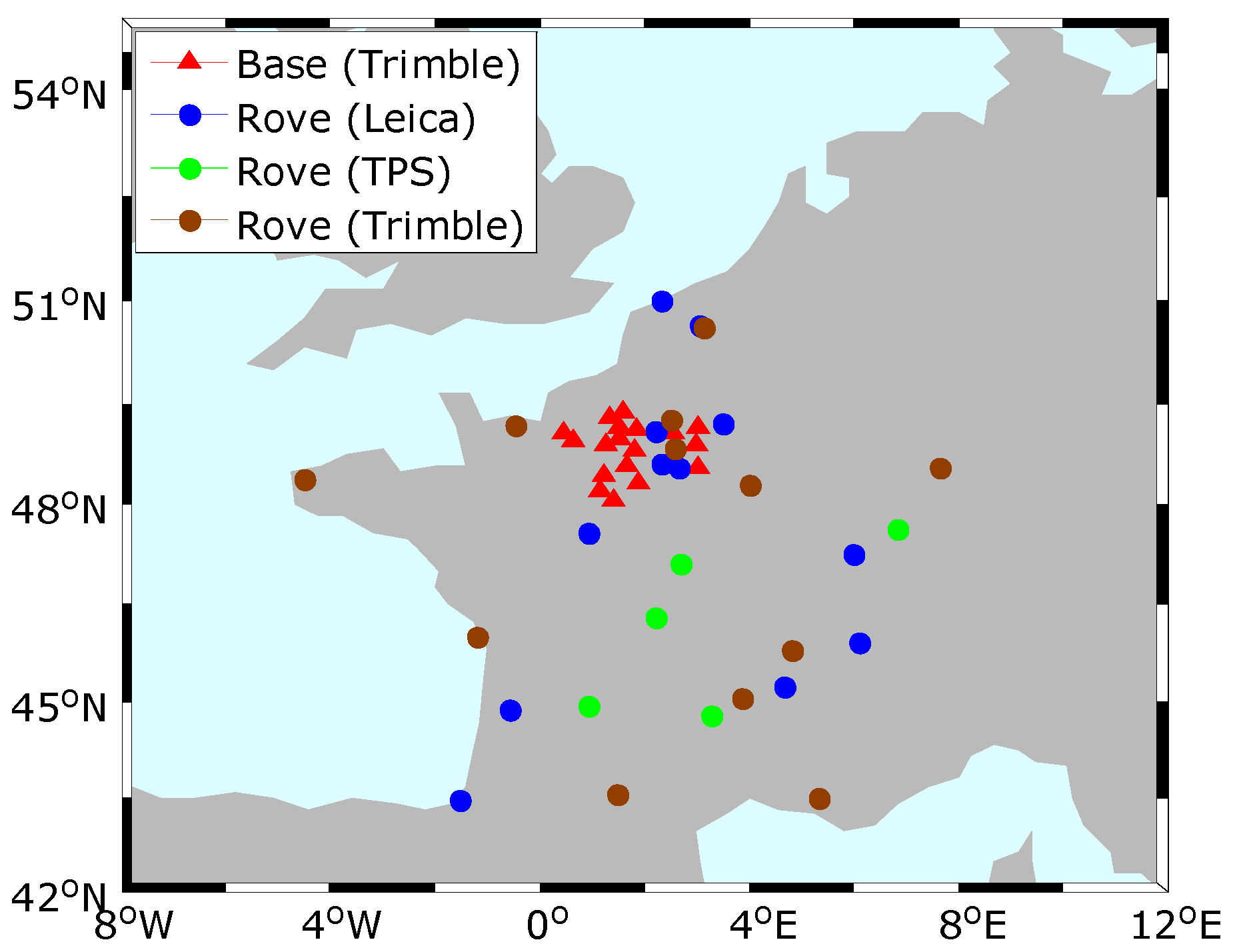
We also selected 18 base stations with the same hardware configuration to generate UPDs, and 28 rover stations with diverse hardware configurations to assess the performance of the proposed method. Both the base and rover stations are located in France. All base stations are equipped with Trimble NetR5 receivers, whereas the rover stations have Trimble, Leica and TPS receivers plus a variety of antennas, domes, and firmware versions. Detailed information about the base and rover stations is given in
Table 1. The distribution of the stations is shown in
Figure 2. Data covering DOY 1–21 in 2013 with sampling interval 30 s were processed.
The proposed strategy was implemented in Positioning and Navigation Data Analyst (PANDA) software [
33], developed at Wuhan University, to process GPS + GLONASS data. The absolute phase center correction, phase wind-up effects, and station displacement models proposed by IERS conventions 2003 were applied. The a priori tropospheric zenith delays were calculated with the Saastamoinen model [
34] and mapped into the slant ones with the global mapping function [
35]. Eclipsing GPS and GLONASS satellites were deleted to avoid the effect of poorly modeled satellite attitudes. The final GPS/GLONASS orbit and clock products from the European Space Agency/European Space Operations Centre IGS analysis center [
36] were fixed in both the UPD estimation and PPP-IAR.
A priori precisions of 1 and 0.01 m were used for the IF code and carrier phase observations respectively. A cutoff angle of 7° was set for the GPS and GLONASS, and an elevation-dependent weighting strategy was used to weight measurements. Owing to inter-system bias, we estimated the individual receiver clock for GPS and GLONASS. The common zenith tropospheric delay was estimated as a piecewise constant every 60 min. We used C1 and P2 code observations for GLONASS for the reference network, whereas for the rover receivers either C1 or P1 can be used with P2 observations.
We divided the daily observations into 24 pieces of hourly sets, and PPP-IAR was performed using a simulated kinematic model for each hourly dataset. Daily static PPP-IAR was first performed for each rover station to attain the “true” ambiguity, which could be used to assess the correctness of hourly PPP-IAR in the kinematic model. The LAMBDA method was used to search for integer NL ambiguity, and the ratio test used to validate ambiguity resolution with a threshold of 2 [
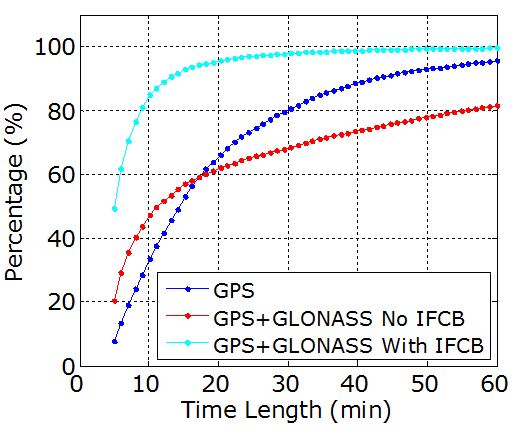
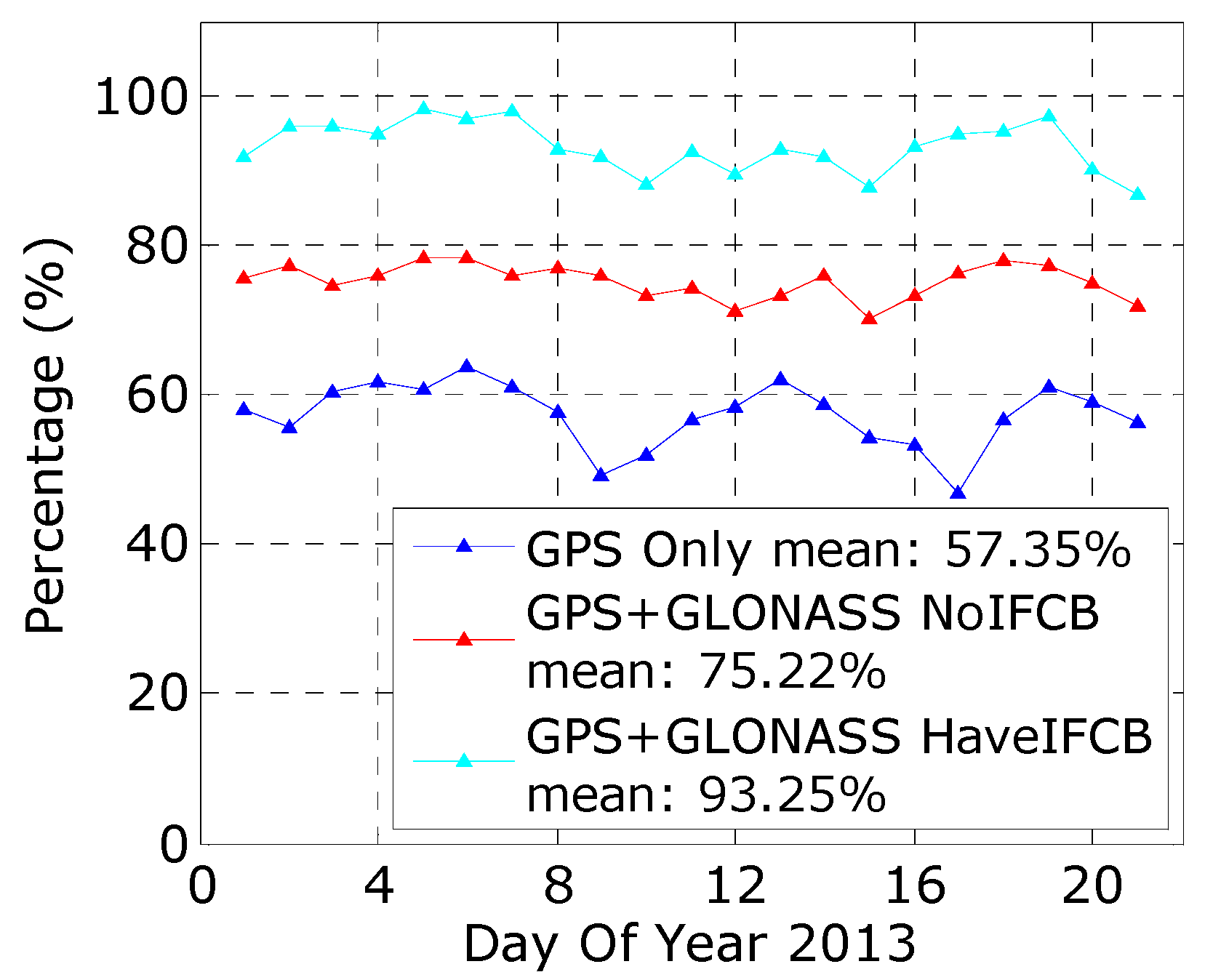
31]. The initial fixing time in each hourly session was recorded and analyzed. We further calculated the cumulative distribution of the initial fixing time, obtaining the fixing rate for different observation durations. To fully assess the effectiveness of the proposed method for different receiver types, we analyzed the fixing percentage as a function of the conducted stations. Since we used only one day of data to generate the IFCB corrections, to analyze its effectiveness, we also analyzed the fixing percentage on each of the 21 days.
5. Discussion
Although there have been several published studies on the topic of GLONASS PPP ambiguity resolution, the problem caused by the IFCB in WL ambiguity fixing has not been well resolved. The shortcomings in the current studies are: they require homogeneous receivers for both UPD estimation and PPP-IAR [
26,
31]; or require a very high-precise ionosphere model [
15,
29]; or use an extra-narrow-lane combination with a short wavelength of only about 5 cm [
27]. It’s revealed by Liu et al. [
31] that, we should use the HMW method for GLONASS PPP-IAR, because it is independent on the precise ionosphere model and has a relatively long wavelength. In this study, we proposed a strategy for calibrating the GLONASS IFCB to achieve rapid GPS + GLONASS PPP-IAR with heterogeneous receivers over a large area. Experiment results show that the proposed IFCB calibration method is efficient for heterogeneous receivers and can even achieve better performance than the homogeneous receivers.
The presented method is limited in its application to existing networks, in that it requires a reference network of homogeneous receivers. However, rapid PPP ambiguity fixing is only required in industrial applications provided by commercial companies, who tend to establish their own reference network rather than rely on existing global navigation satellite system networks with few homogeneous receivers. For example, both Trimble (Sunnyvale, California, USA) and Fugro (Leidschendam, The Netherlands) have their own reference network of homogeneous receivers [
37,
38]. Furthermore, because the proposed IFCB calibration method does not rely on a dense reference network of homogeneous receivers, it is easy for commercial companies to deploy a sparse network of homogeneous receivers at intervals 500–1000 km to provide a GPS + GLONASS rapid PPP ambiguity fixing service in an area.
6. Conclusions
Using multi-GNSS can substantially improve the fixing percentage of PPP-IAR. GLONASS is the second worldwide positioning system, and the use of GPS + GLONASS will contribute greatly to the performance of PPP-IAR. However, IFCB prevents GLONASS ambiguity fixing with heterogeneous receivers. This paper proposes a method of calibrating GLONASS IFCB, such that PPP-IAR can be performed across heterogeneous rover receivers. This will make it possible to provide commercial real-time PPP service with rapid ambiguity resolution using multi-GNSS constellations.
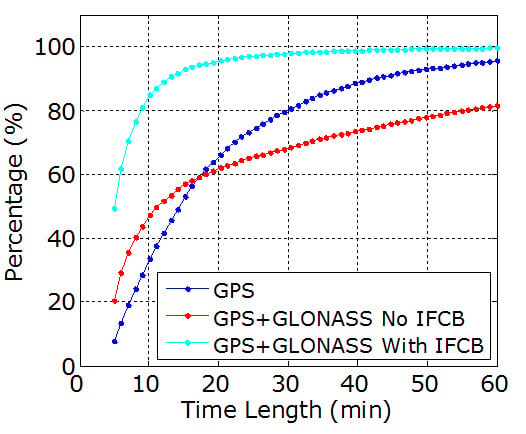
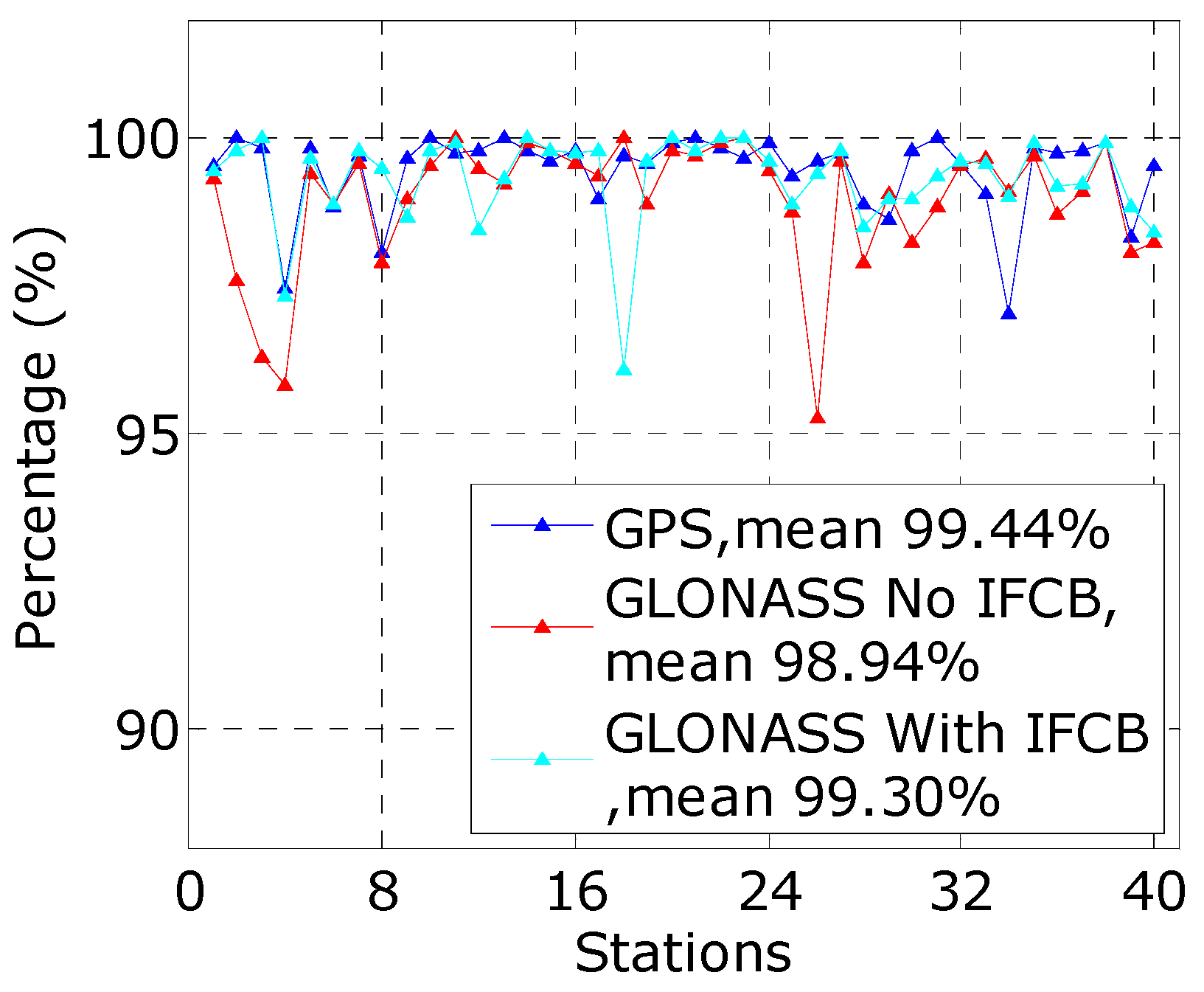
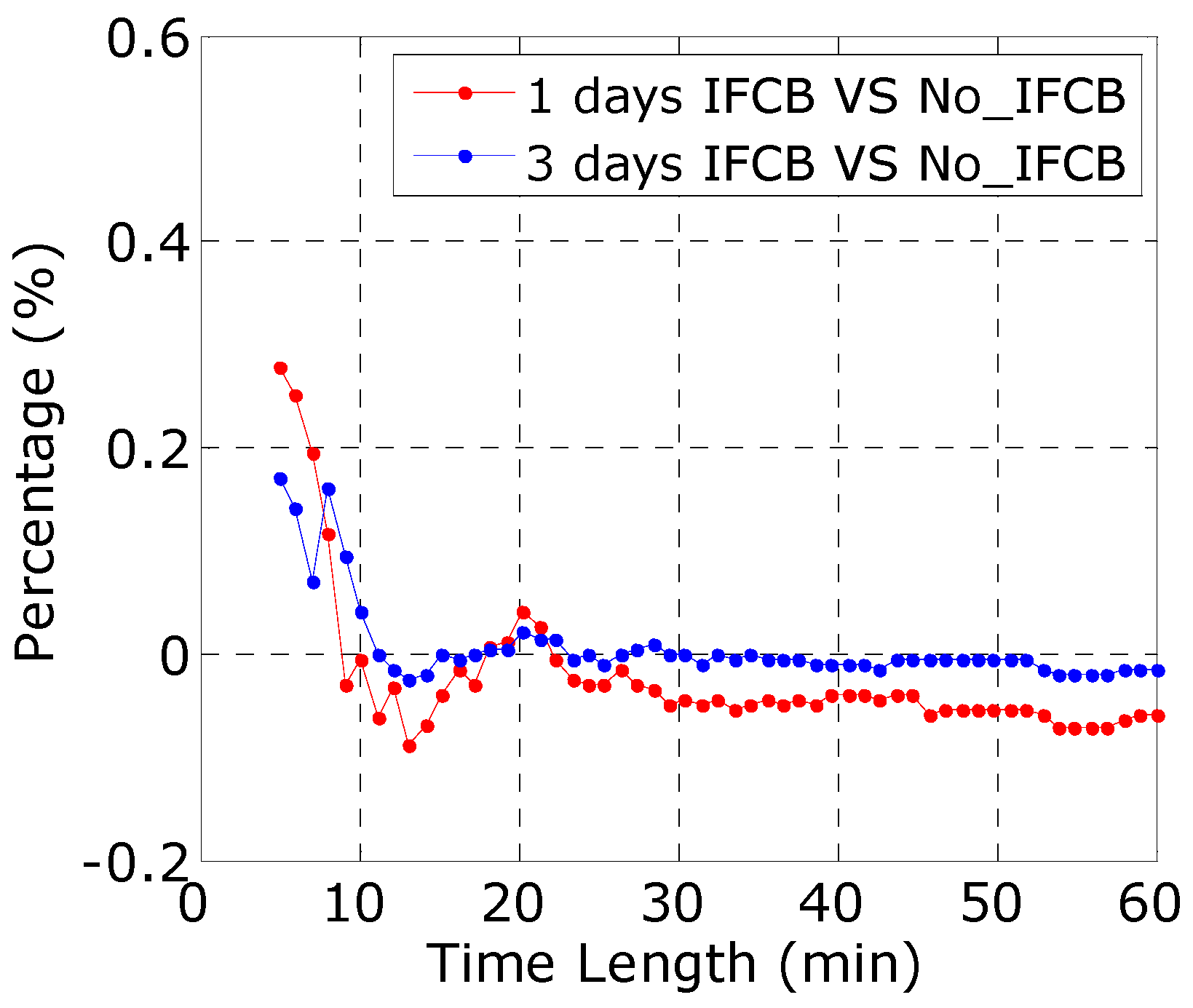
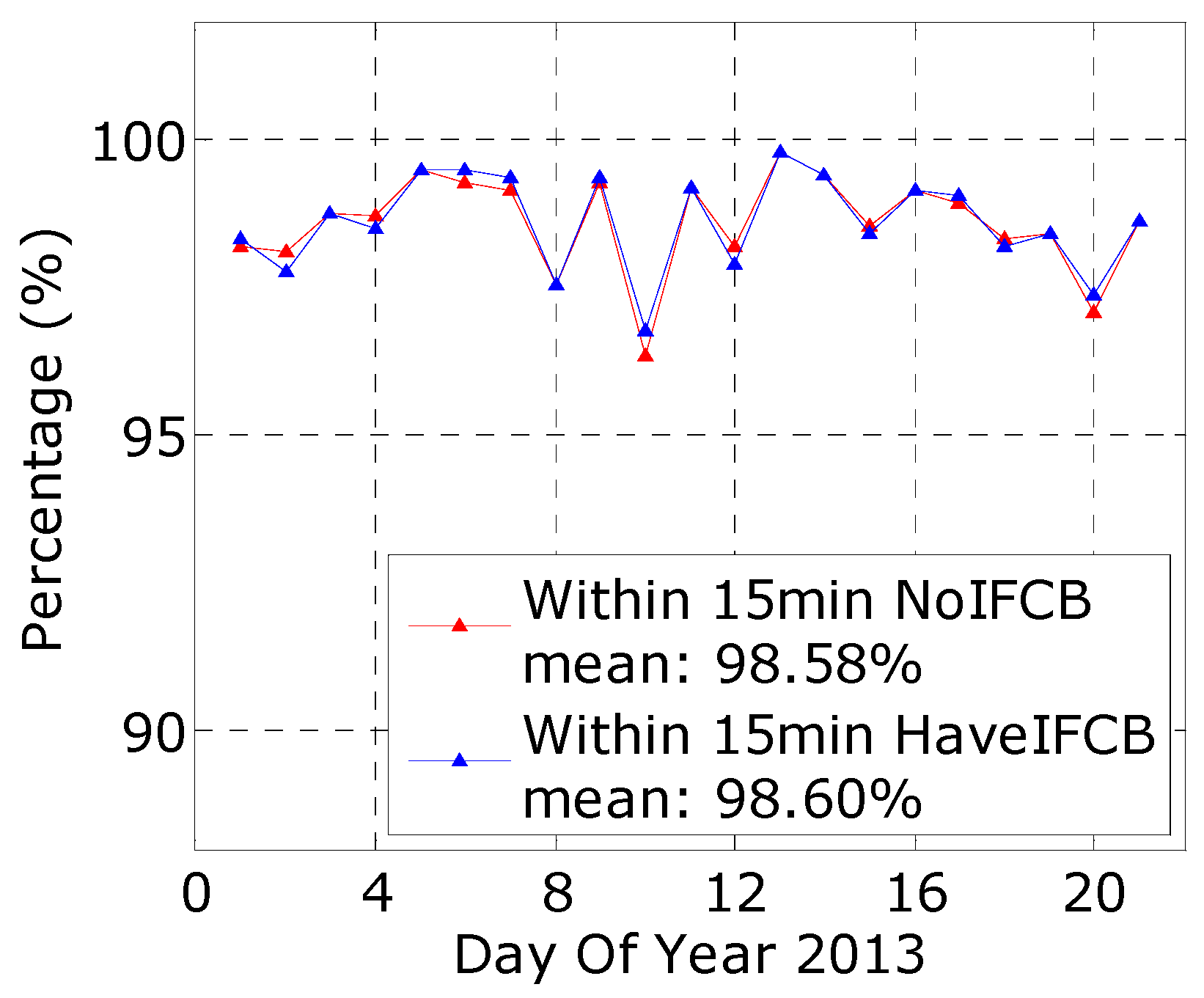
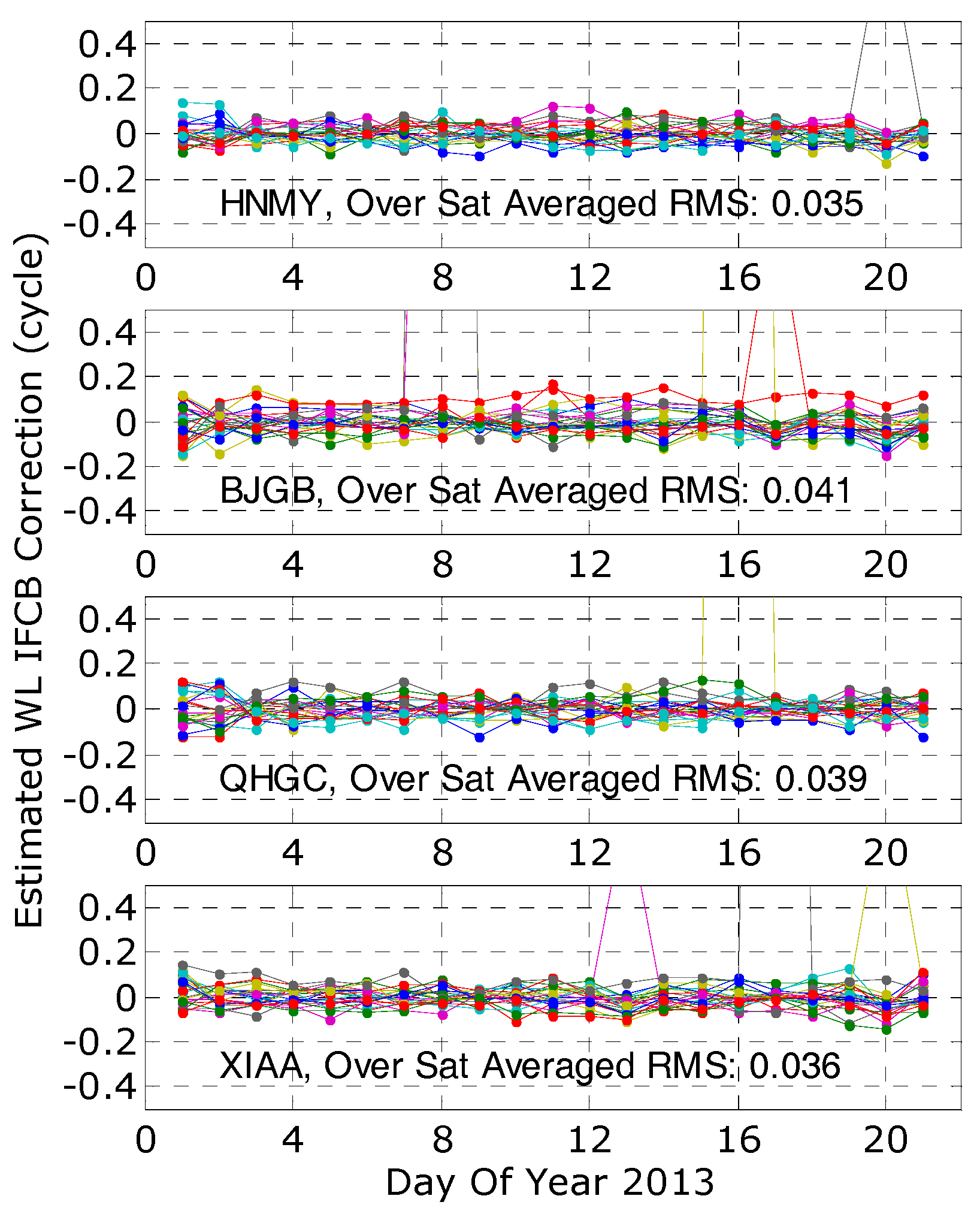
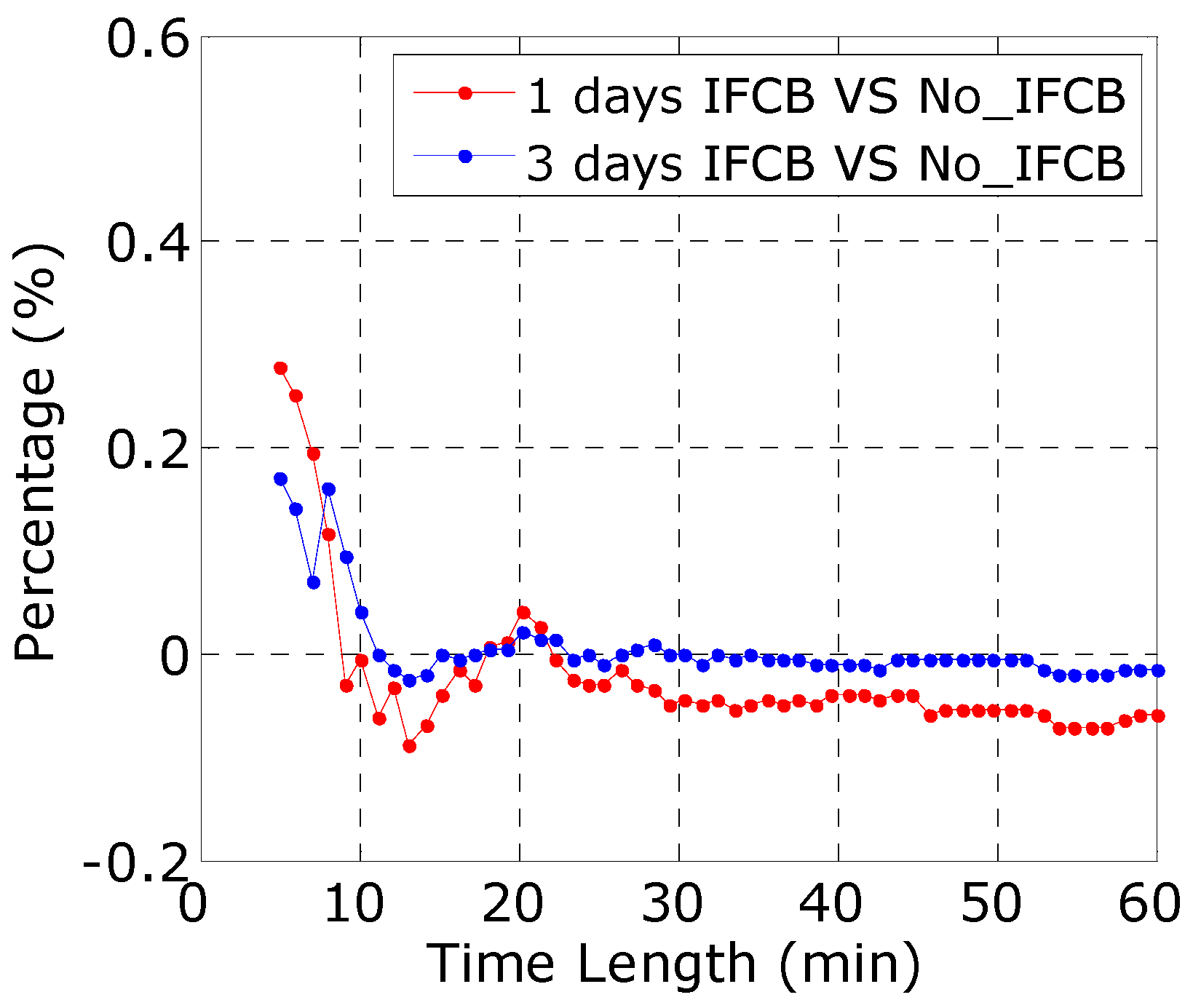
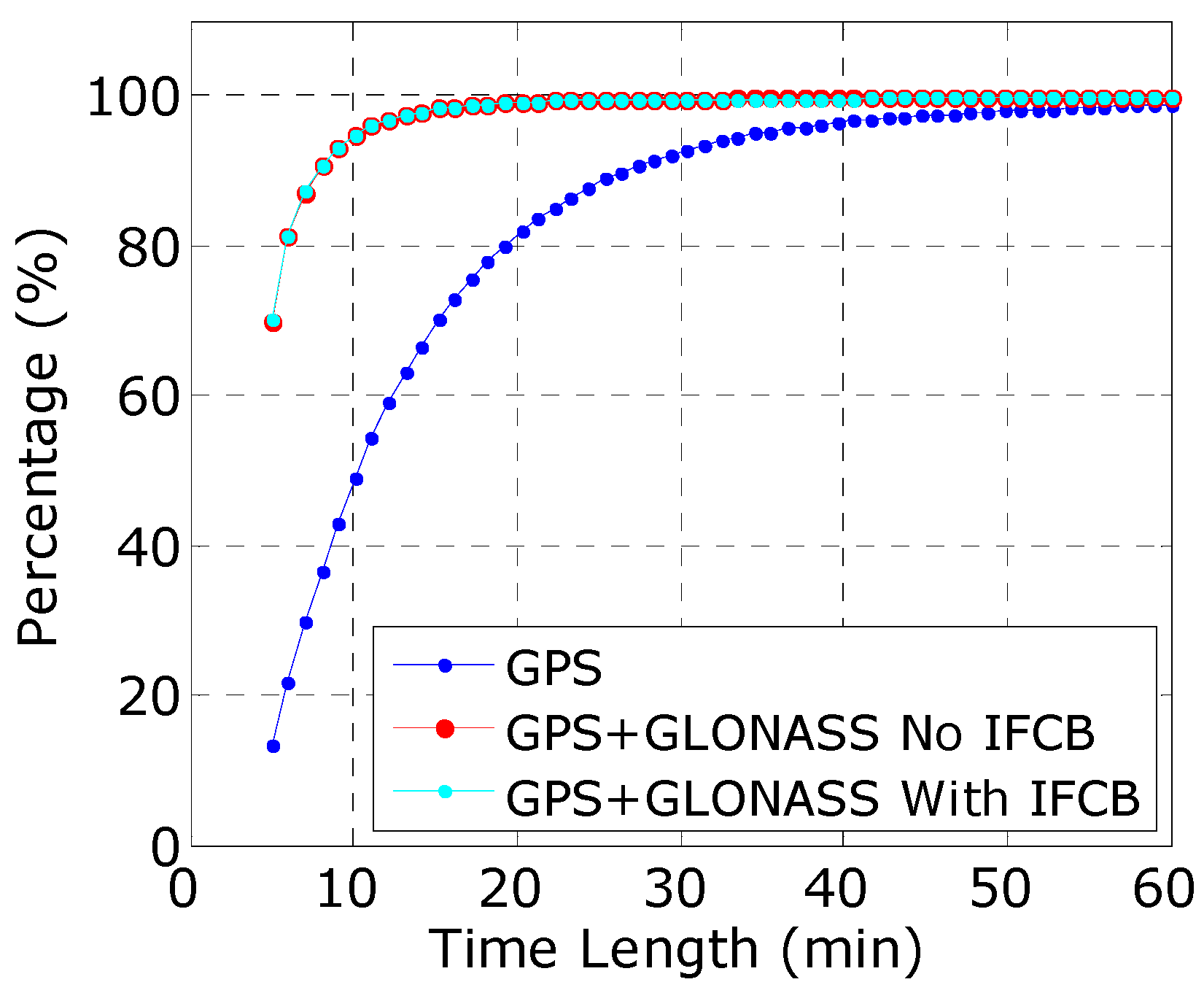
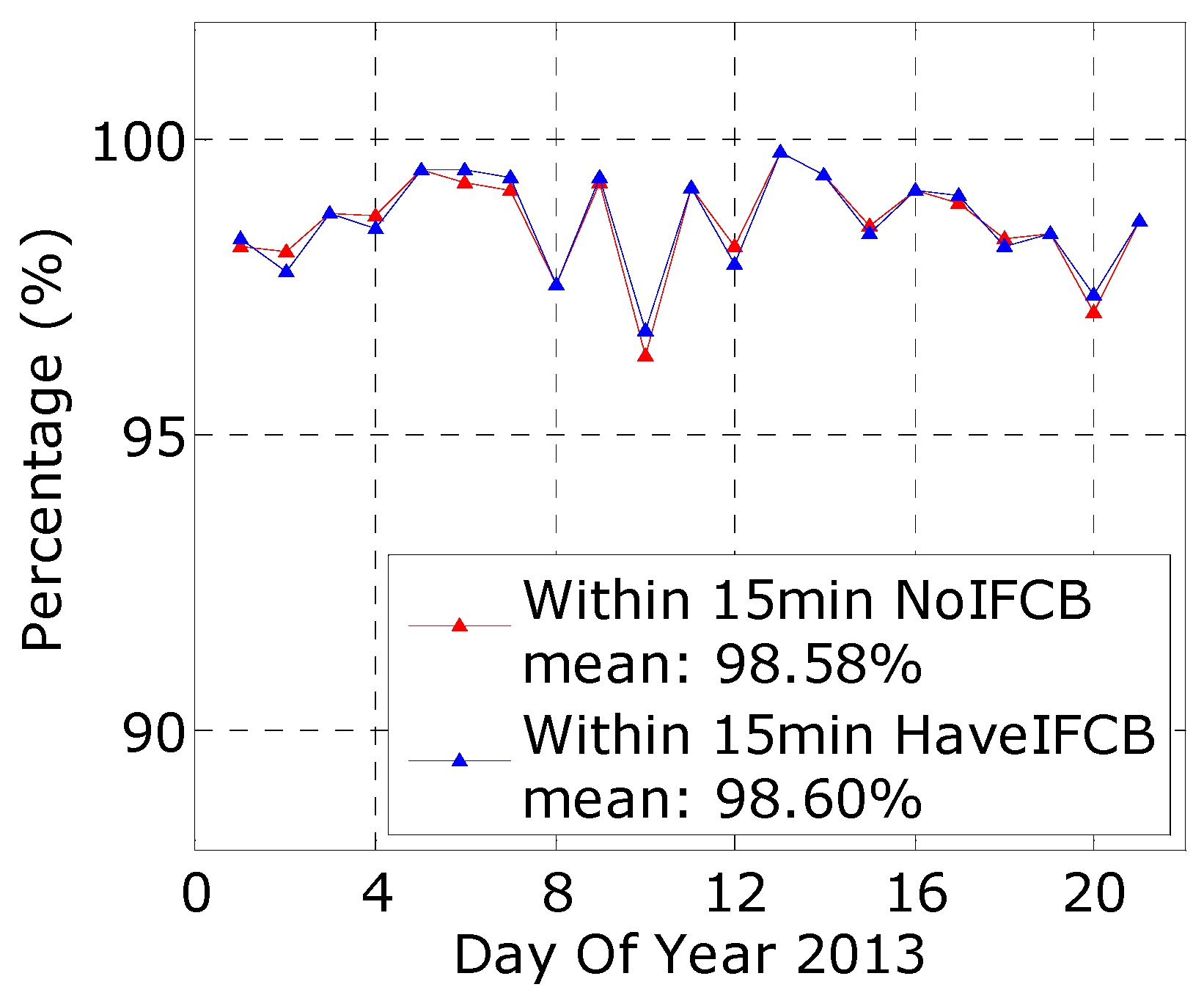
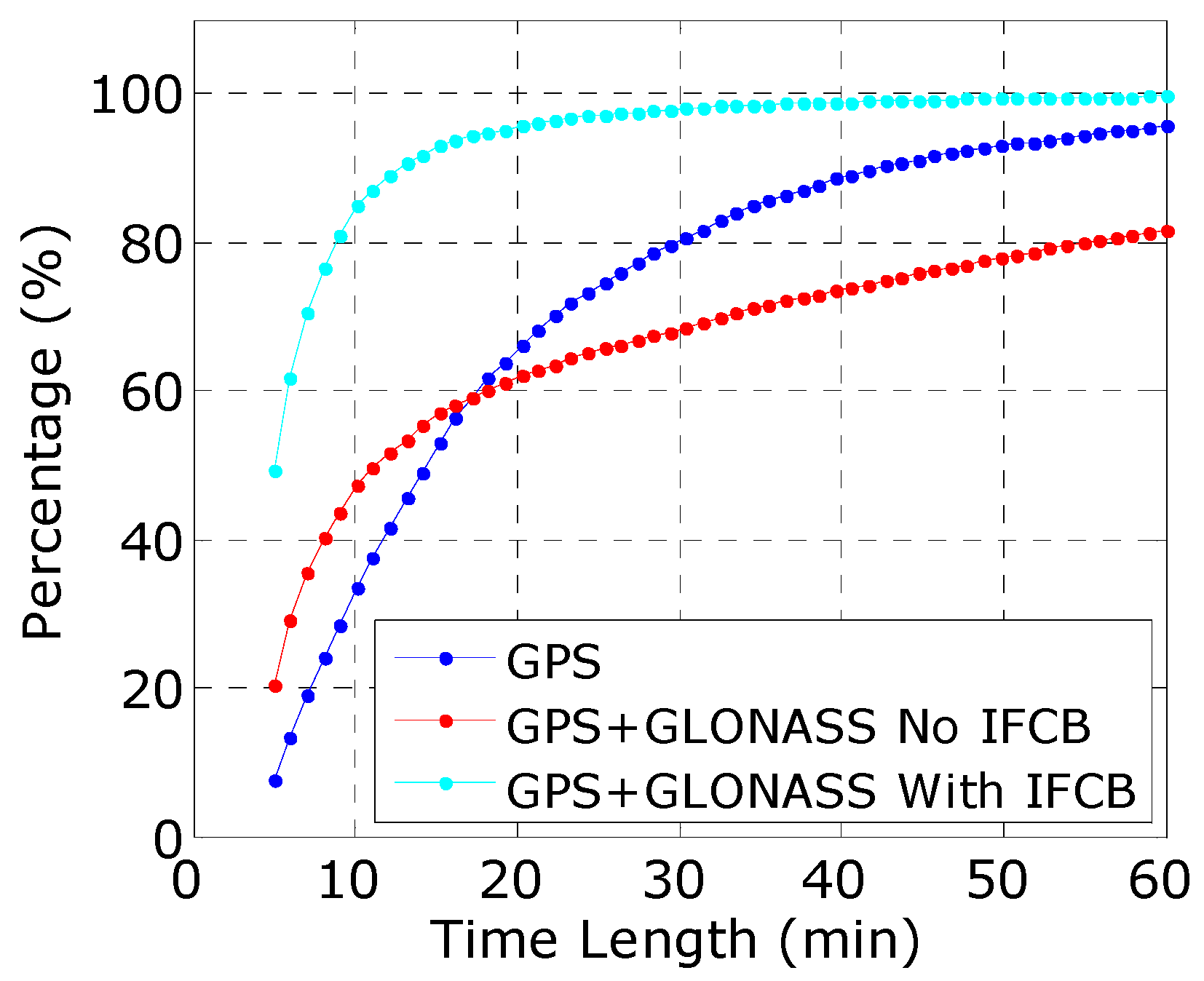
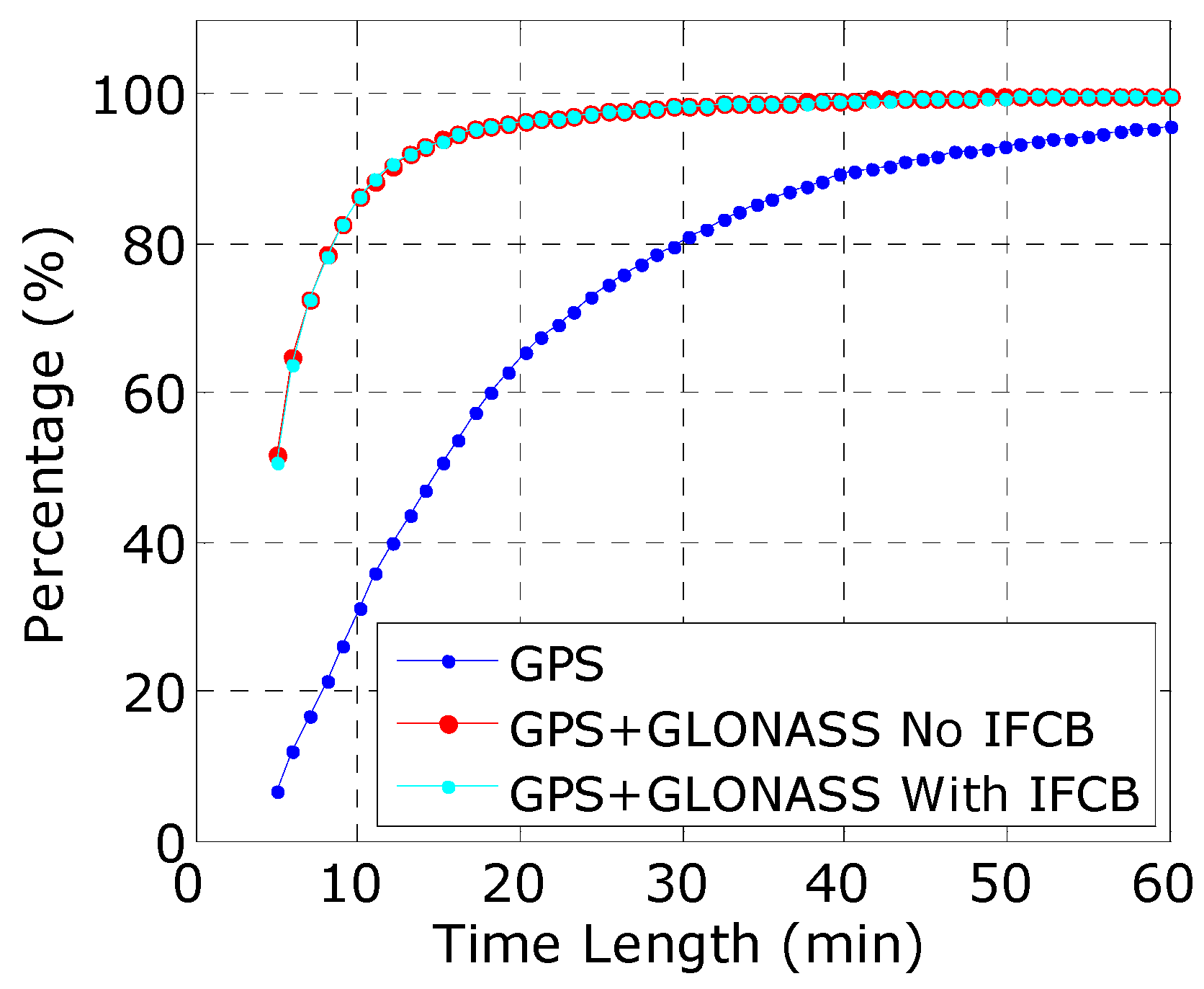
We first assessed the efficiency of the method with 21-day data collected by a network of 66 Trimble NetR8 receivers. As homogeneous receivers are used for both UPD estimation and PPP-IAR, PPP-IAR can be performed without considering the IFCB effect and can be used to assess the performance of the IFCB calibration method. The results show that we need only one day of data to estimate the IFCB, and the estimated daily IFCB for different days is consistent for better than 0.05 cycles (RMS). Upon adding GLONASS without IFCB correction, the fixing percentage within 5 min improves from 13.23 to 69.94%. We then further applied the IFCB calibration and found that the percentage can even be slightly improved by 0.28%.
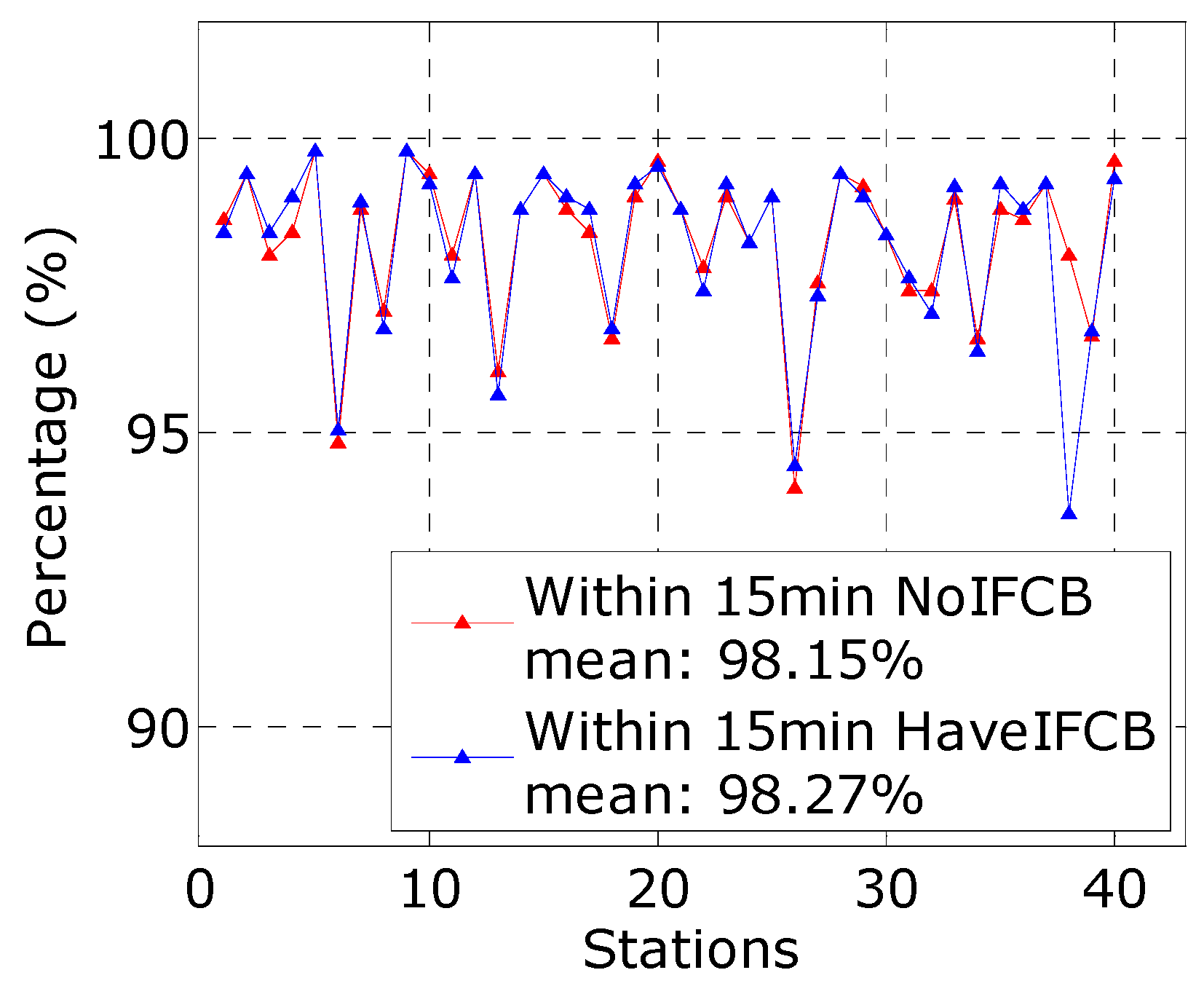
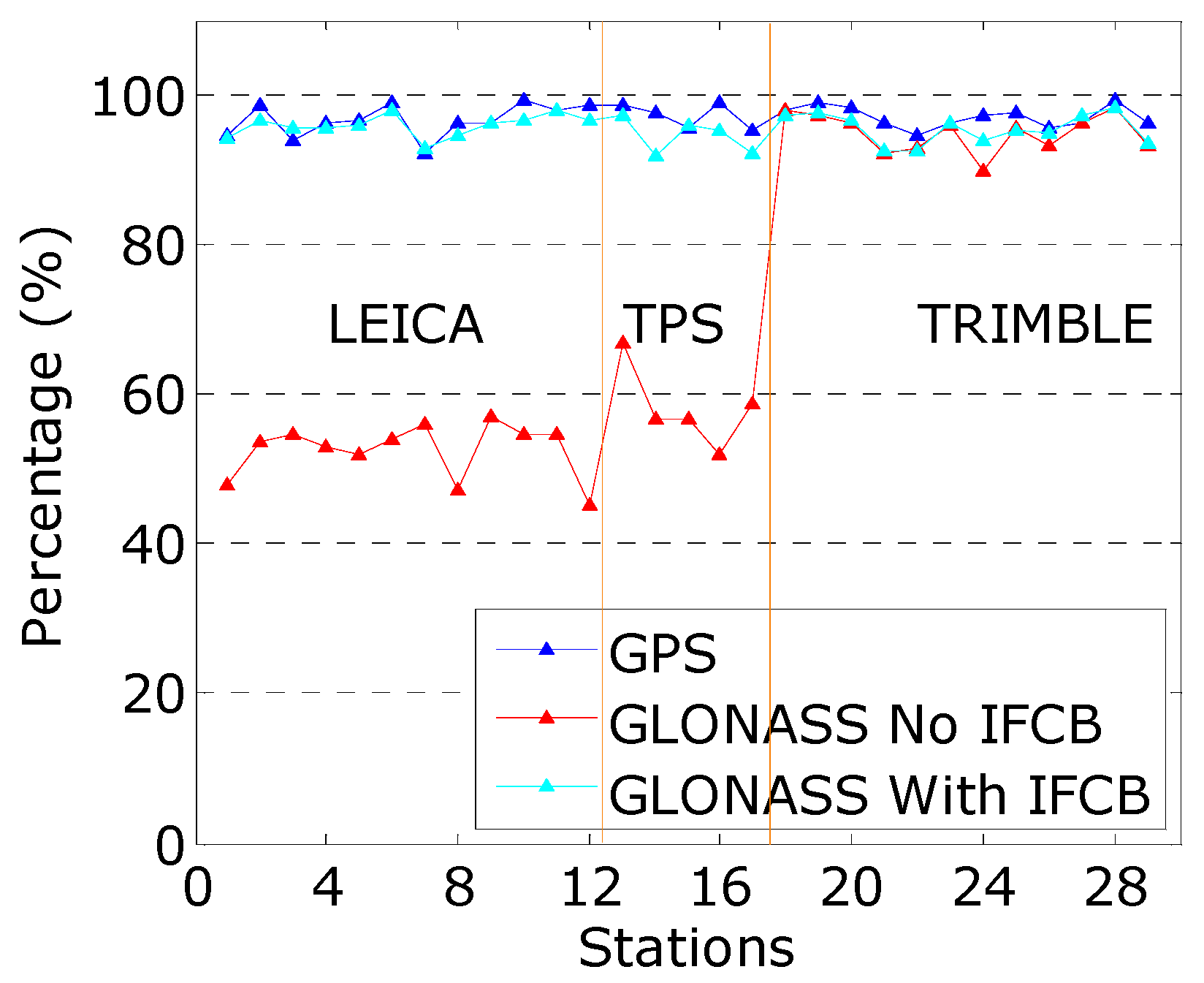
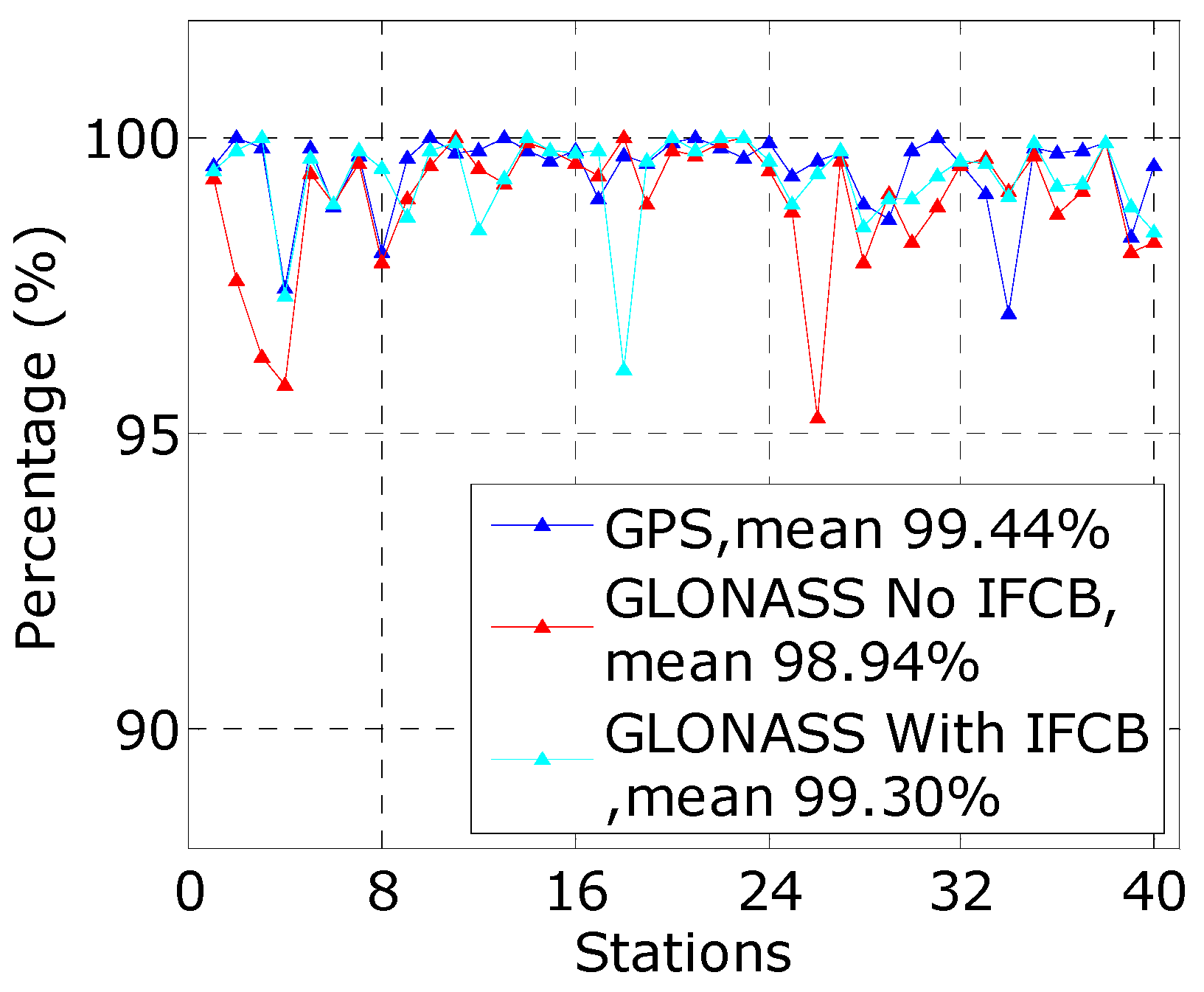
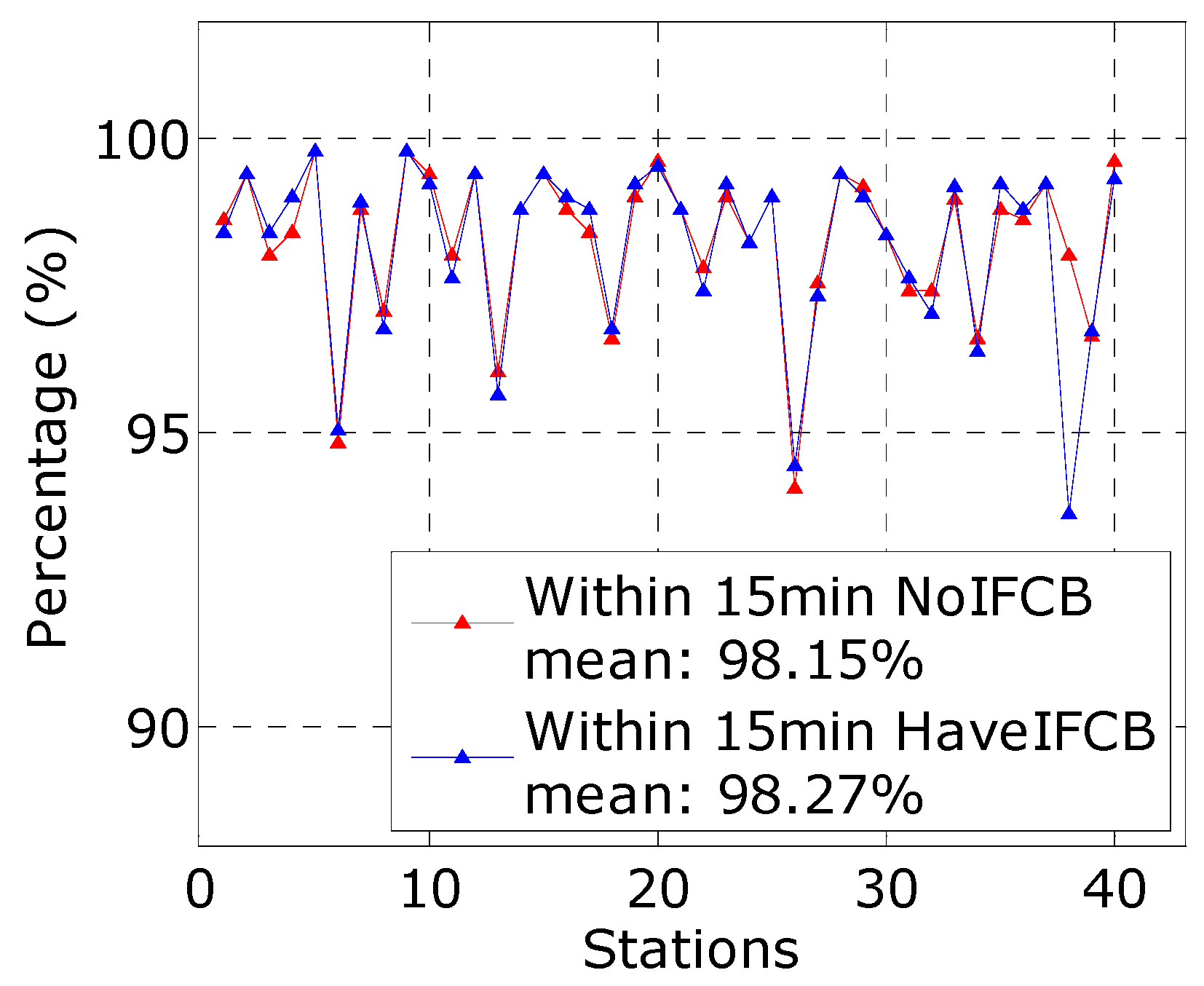
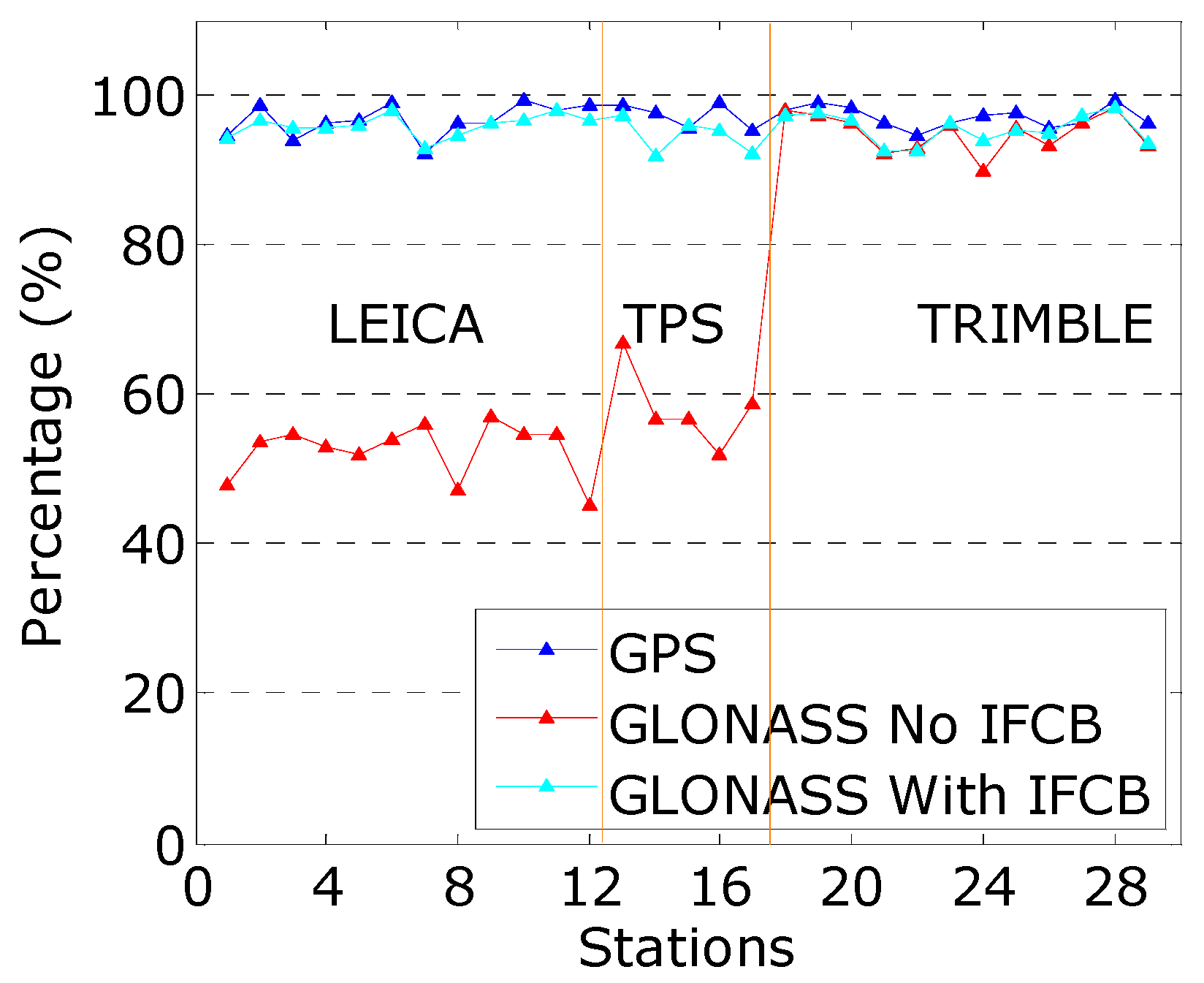
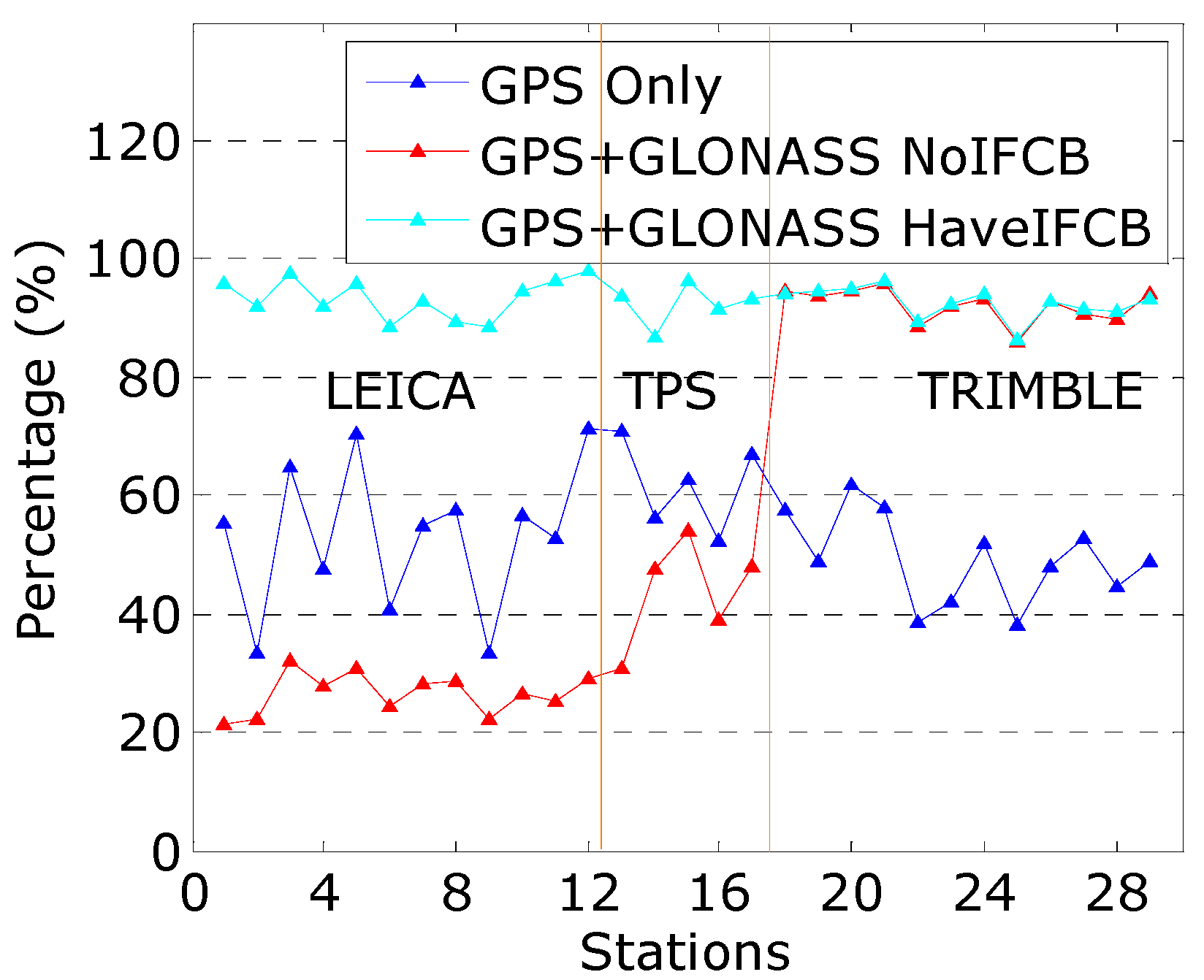
We then used a network of 29 heterogeneous rover receivers to validate the method and the data collection also extended over 21 days. Before applying the IFCB calibration, the fixing percentage for GPS + GLONASS is even smaller than the GPS-only solution. Upon applying the IFCB calibration, the fixing percentage improves for receivers from each manufacturer. The average fixing percentage within 15 min for the 12 Leica, 5 TPS, and 12 Trimble receivers is 93.4%, 92.3%, and 92.6%, respectively. These values are comparable to results for reference stations of homogeneous receivers. Upon adding GLONASS, the positioning accuracy of ambiguity-fixed PPP solutions improves by 17.5%, 11.8%, and 12.1% for the north, east, and upward directions. These results confirm that the proposed IFCB calibration method is efficient for GPS + GLONASS PPP-IAR with heterogeneous rover receivers.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}