Validation and Assessment of Multi-GNSS Real-Time Precise Point Positioning in Simulated Kinematic Mode Using IGS Real-Time Service



Abstract
:
1. Introduction
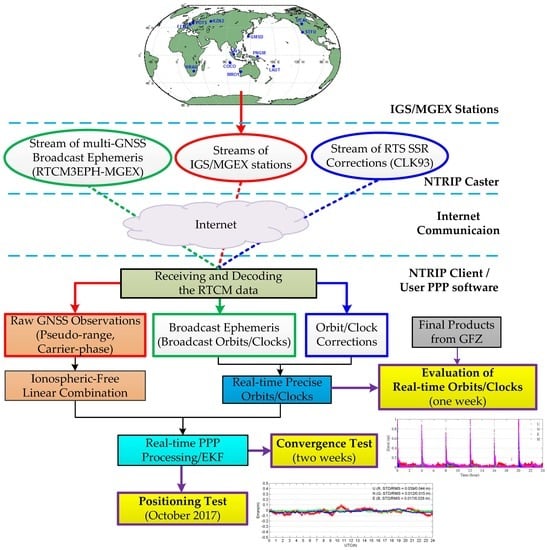
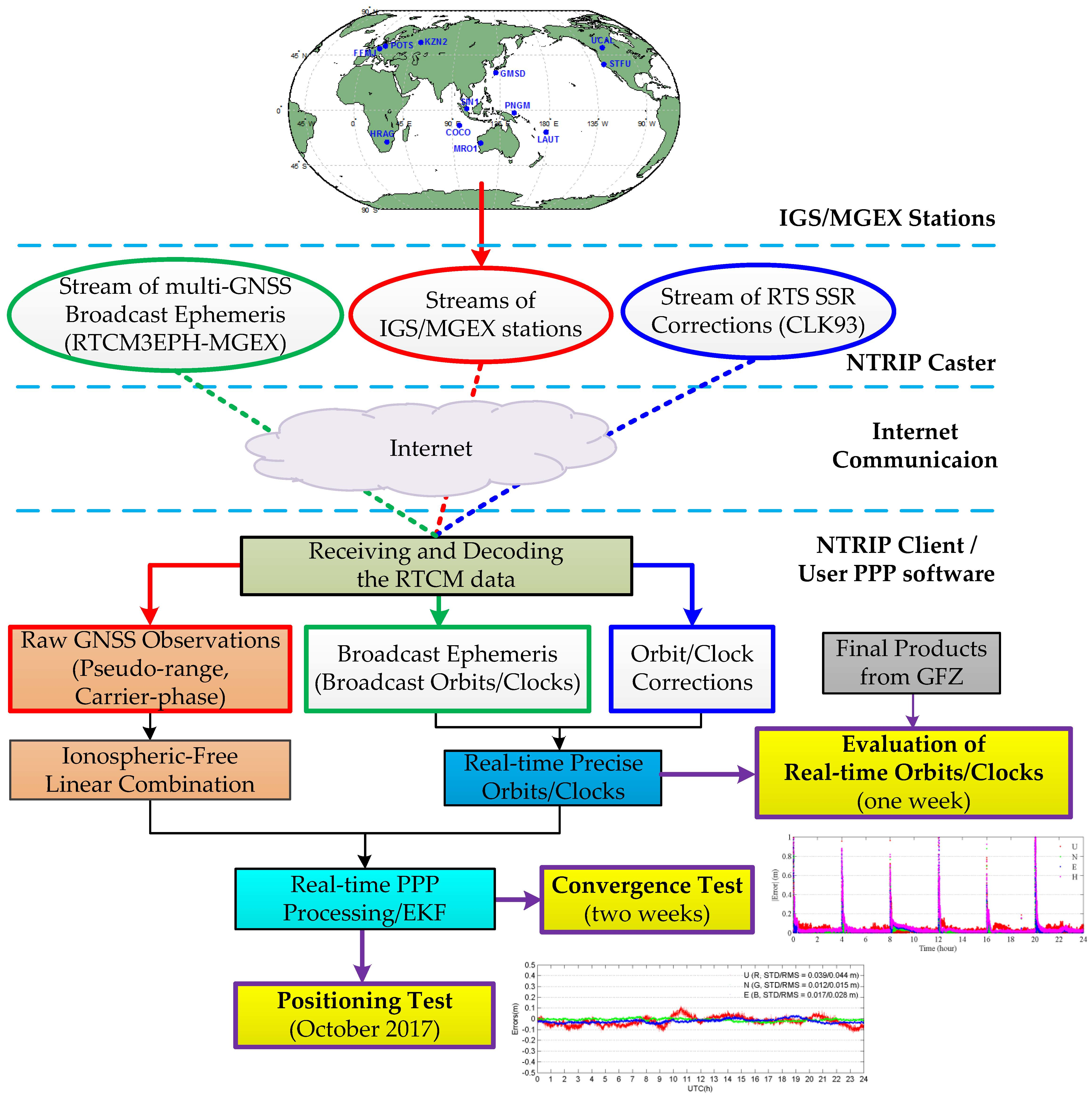
2. Real-Time Precise Satellite Orbits and Clocks from IGS RTS
2.1. Computation Method of Real-Time Precise Satellite Orbits and Clocks
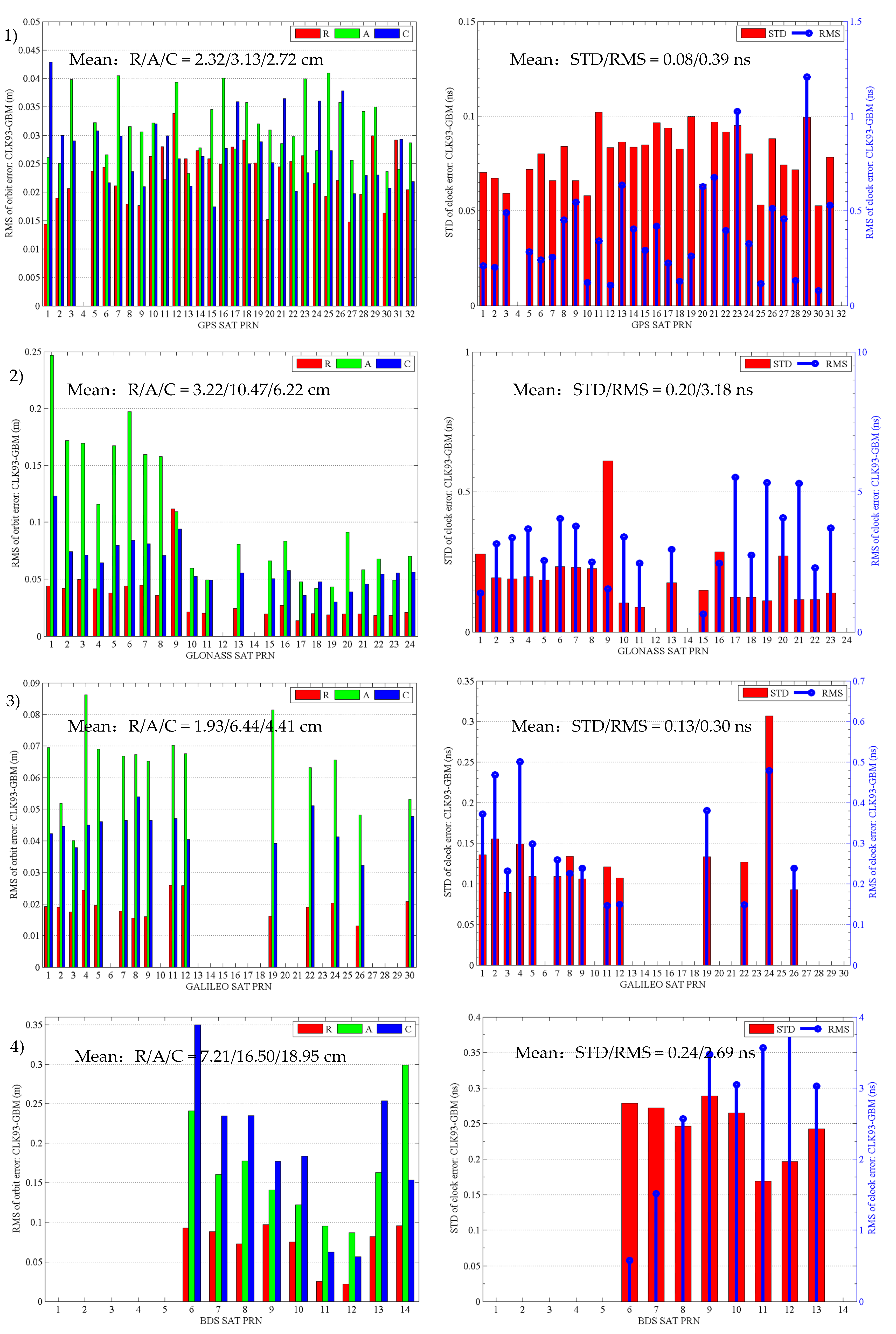
2.2. Evaluation of Real-Time Precise Satellite Orbits and Clocks Derived from the CLK93 Product
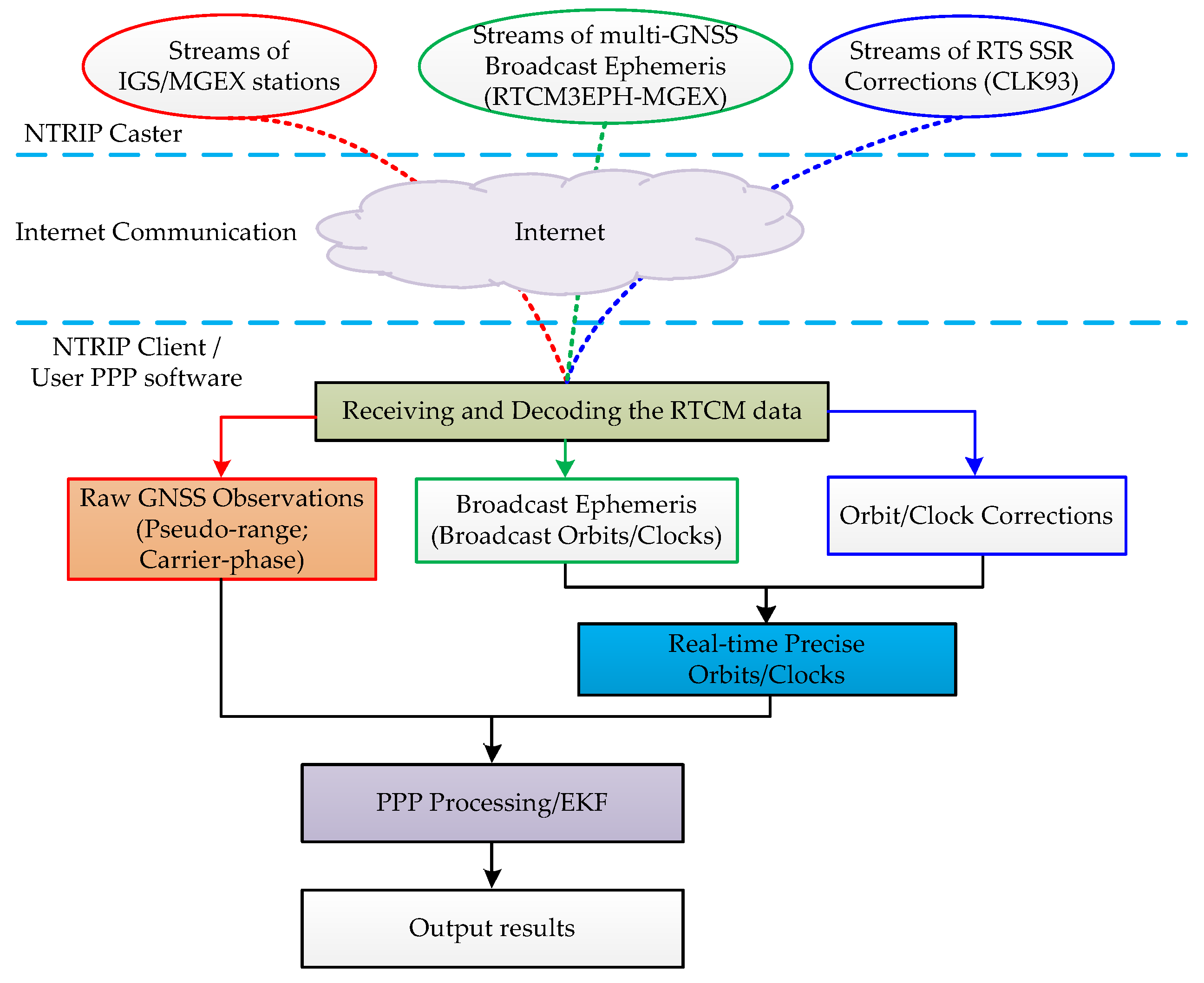
3. Real-Time Multi-GNSS PPP
3.1. Mathematic Model of Multi-GNSS PPP
3.2. Real-Time PPP Data Processing Models/Strategies
4. Performance Evaluation of Real-Time Multi-GNSS Simulated Kinematic PPP
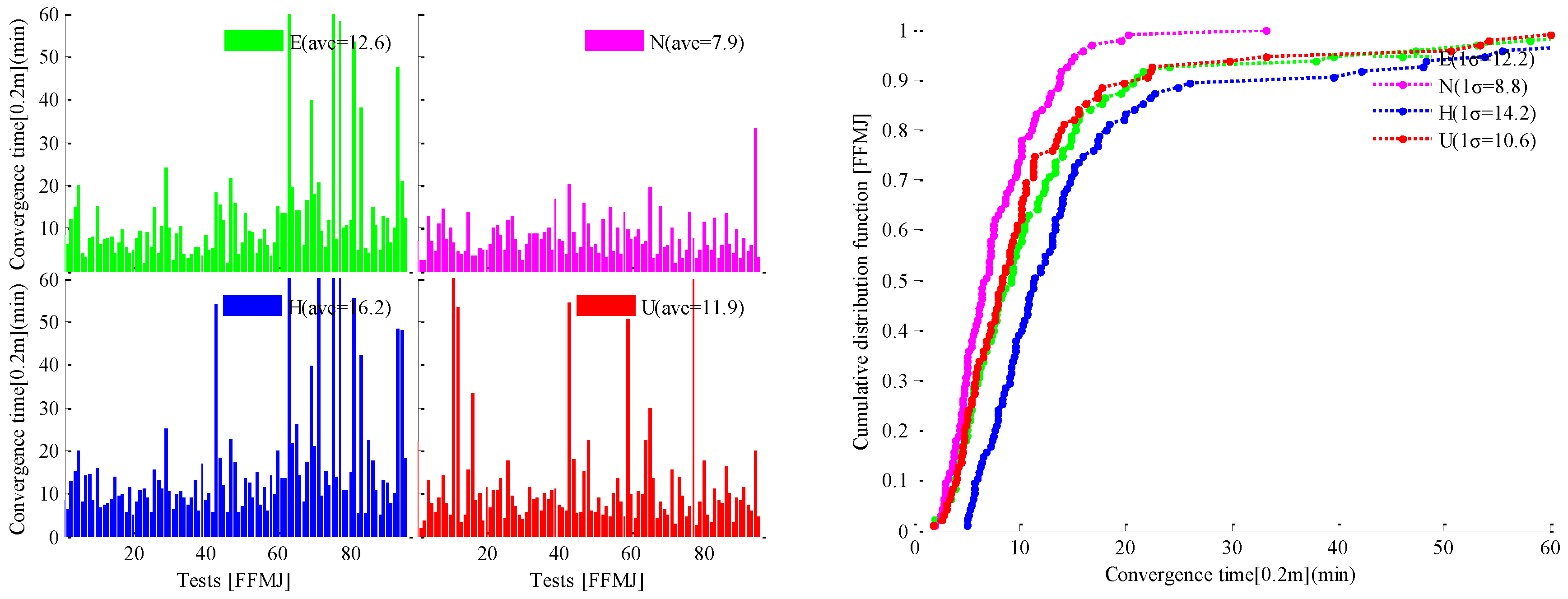
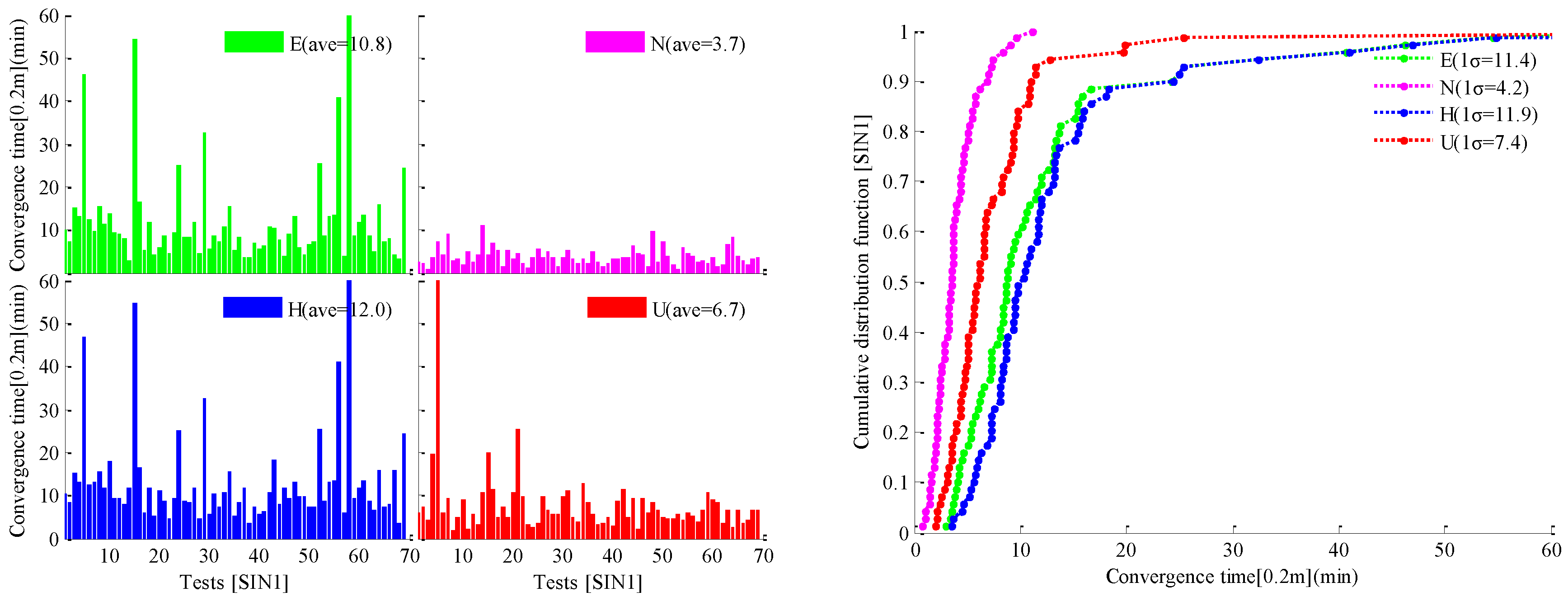
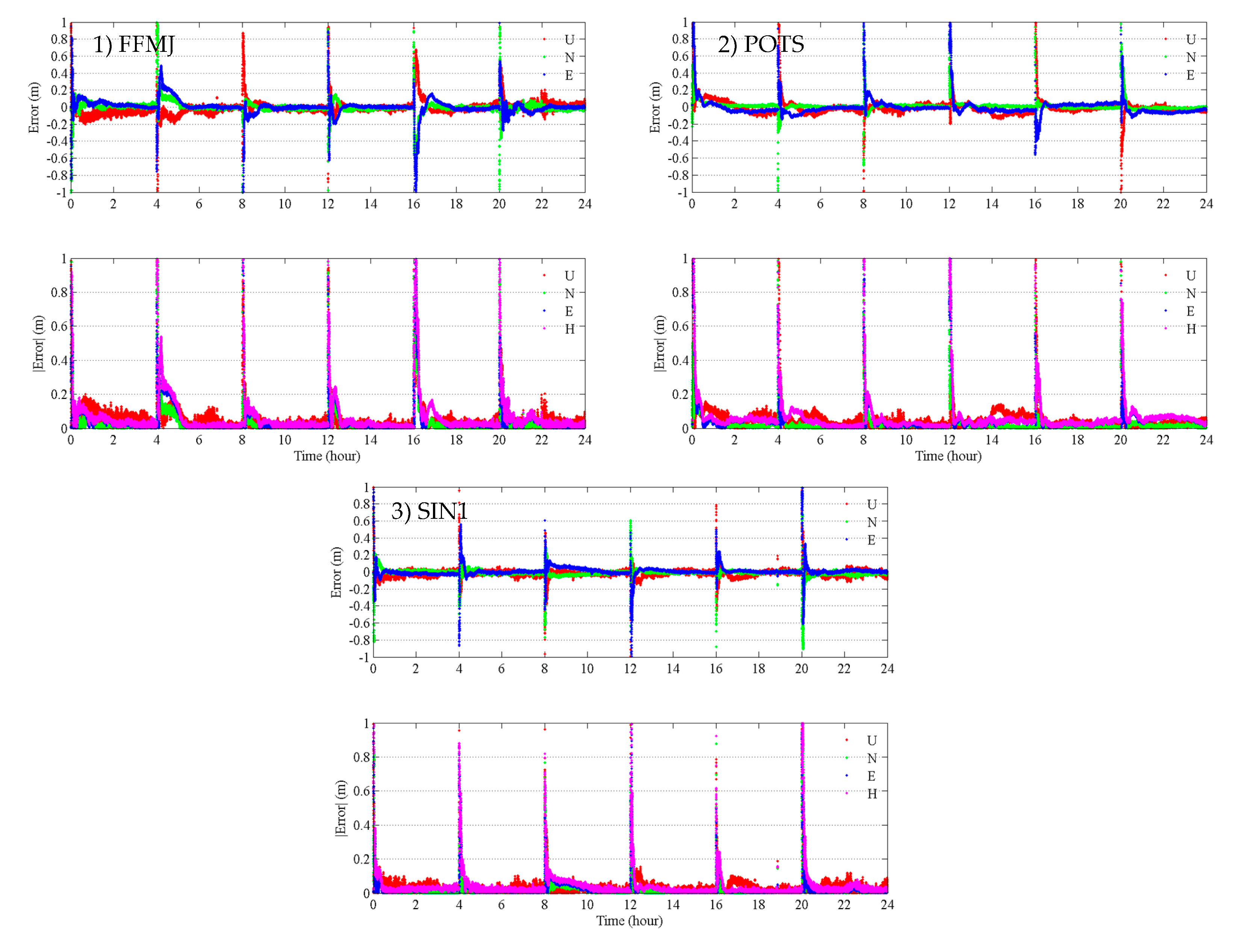
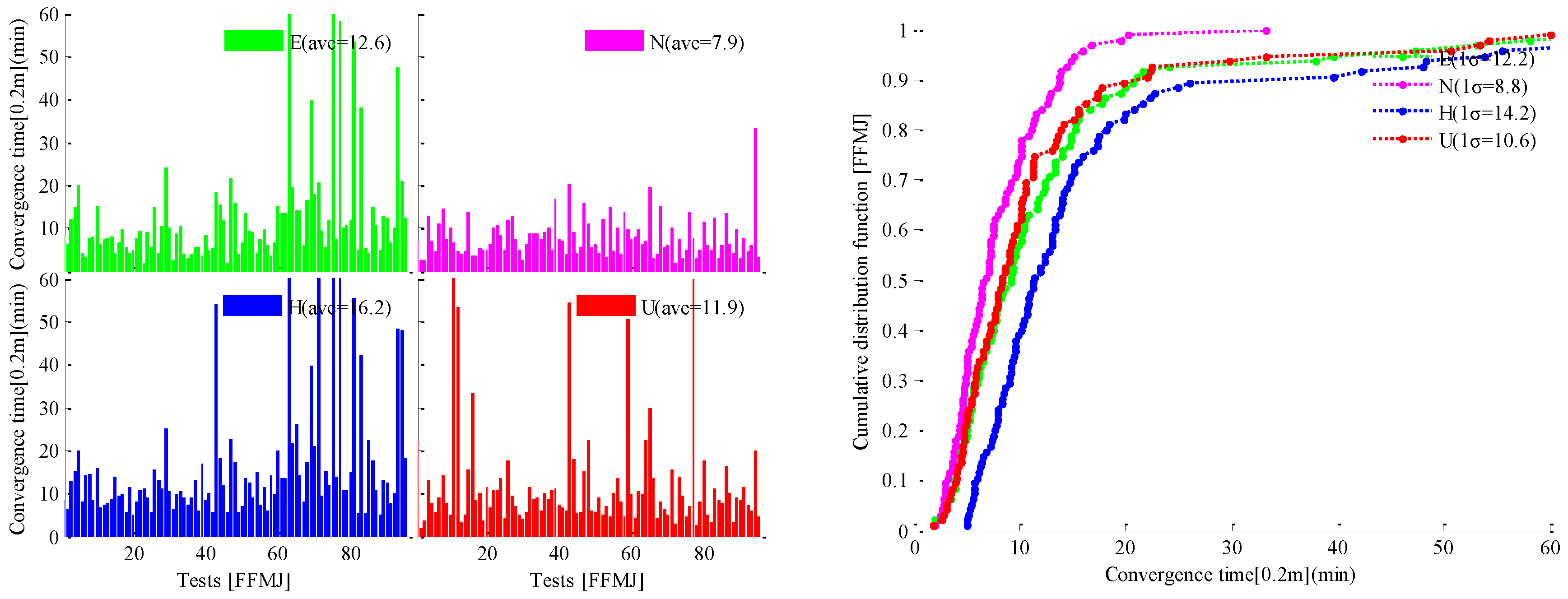
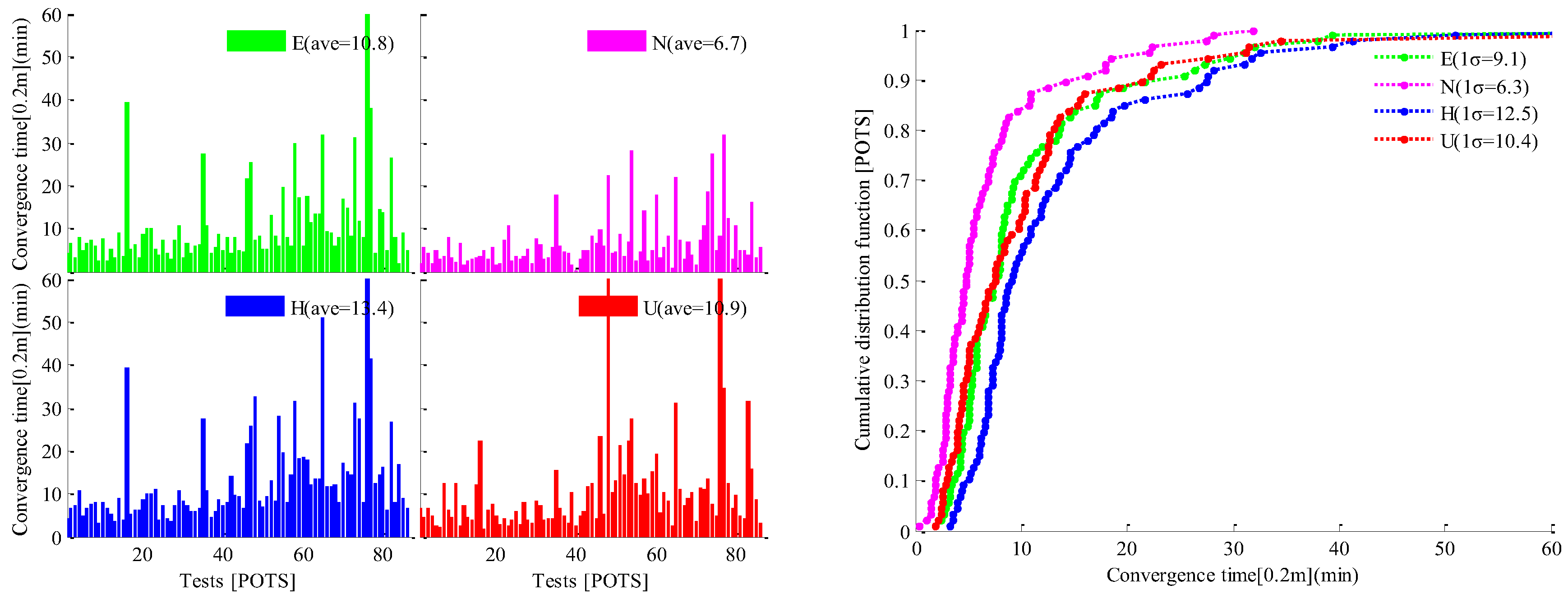
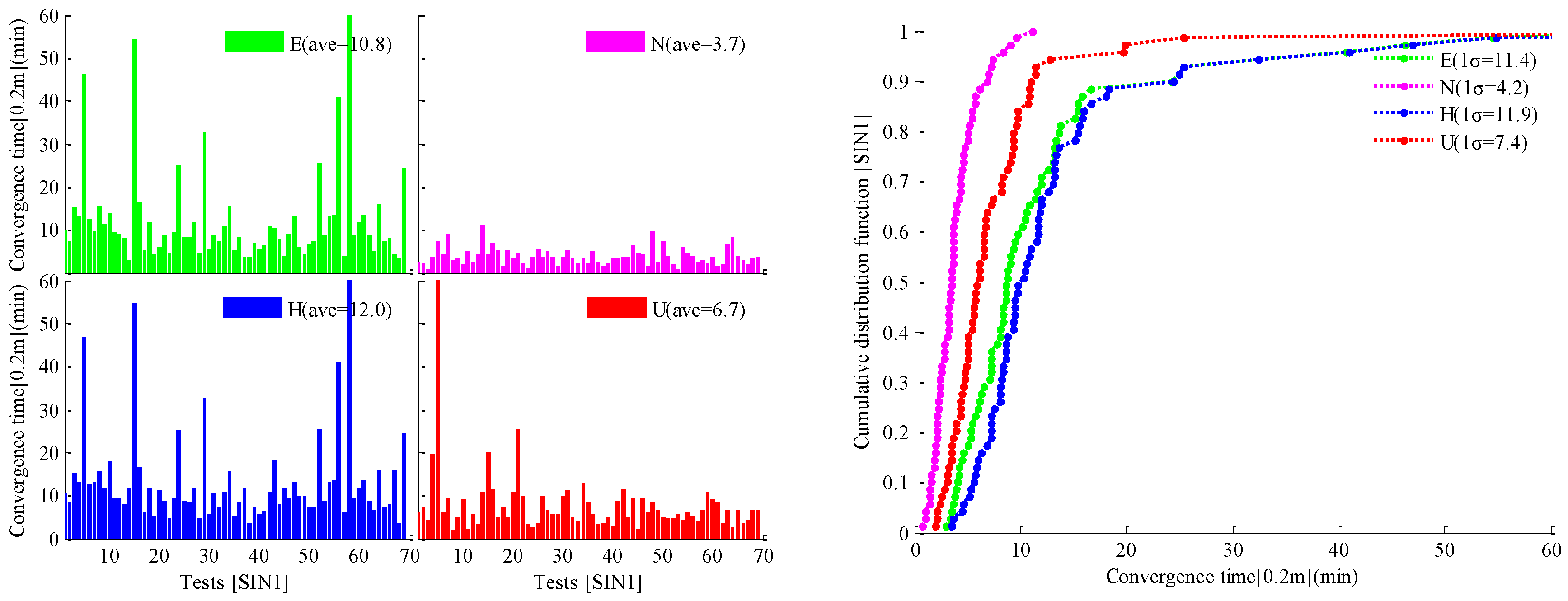
4.1. Evaluation of the Convergence Time of Real-Time PPP
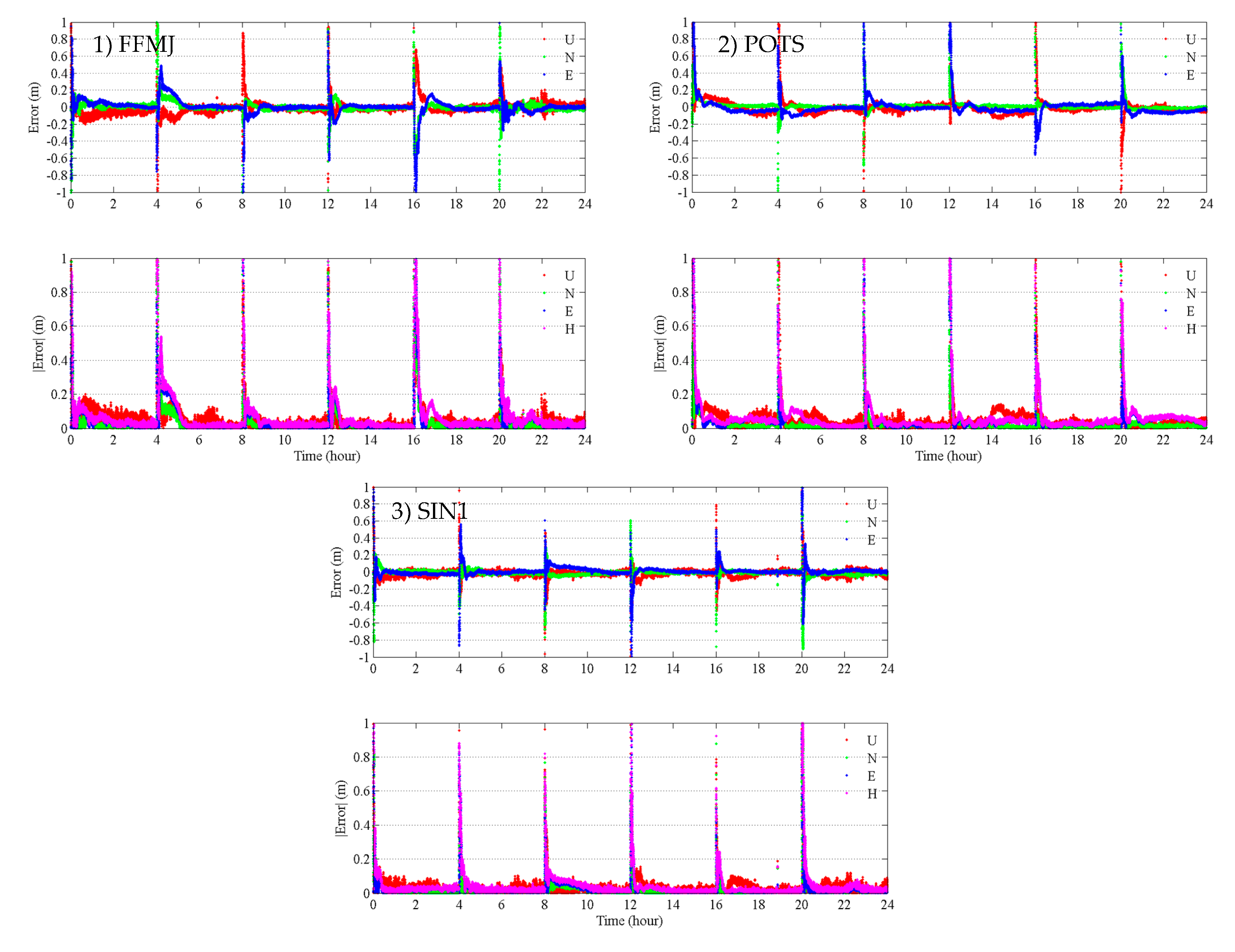
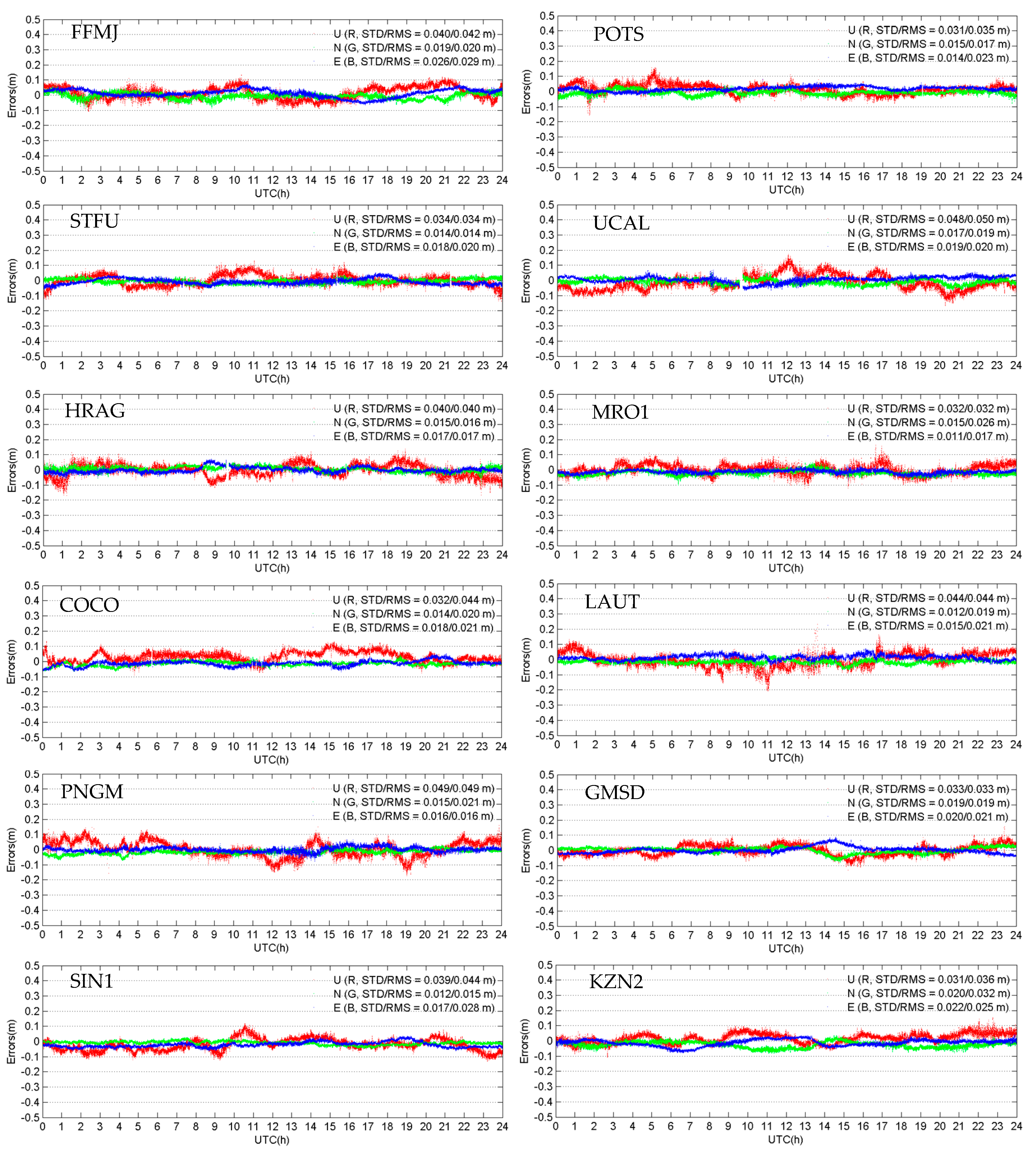
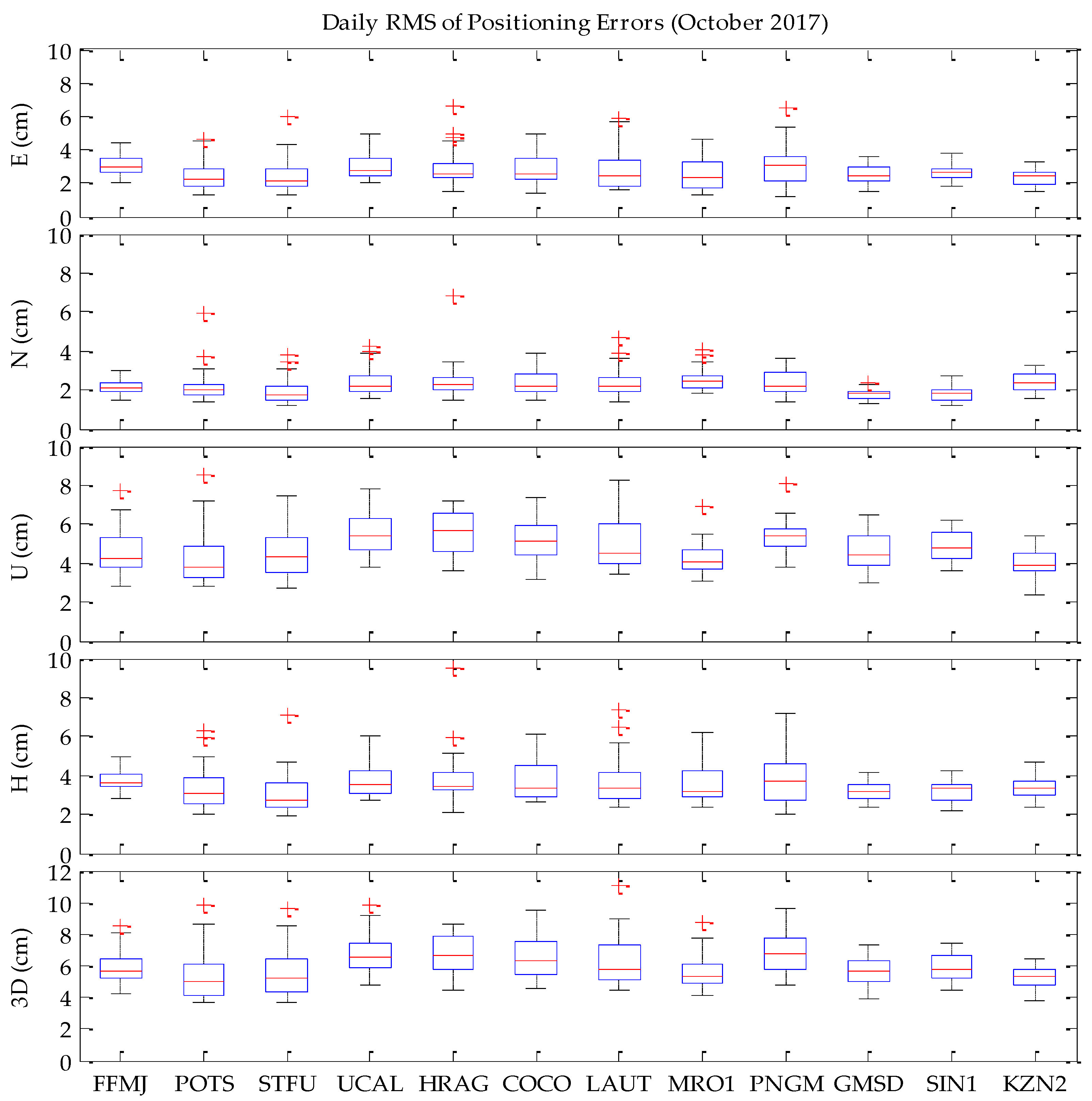
4.2. Evaluation of the Accuracy of Real-Time PPP
5. Discussion
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef]
- Kouba, J.; Héroux, P. Precise point positioning using IGS orbit and clock products. GPS Solut. 2001, 5, 12–28. [Google Scholar] [CrossRef]
- Dow, J.M.; Neilan, R.E.; Rizos, C. The international GNSS service in a changing landscape of global navigation satellite systems. J. Geod. 2009, 83, 191–198. [Google Scholar] [CrossRef]
- Wang, L.; Li, Z.; Zhao, J.; Zhou, K.; Wang, Z.; Yuan, H. Smart device-supported BDS/GNSS real-time kinematic positioning for sub-meter-level accuracy in urban location-based services. Sensors 2016, 16, 2201. [Google Scholar] [CrossRef] [PubMed]
- Wang, L.; Li, Z.; Yuan, H.; Zhao, J.; Zhou, K.; Yuan, C. Influence of the time-delay of correction for BDS and GPS combined real-time differential positioning. Electron. Lett. 2016, 52, 1063–1065. [Google Scholar] [CrossRef]
- Rizos, C.; Montenbruck, O.; Weber, R.; Weber, G.; Neilan, R.; Hugentobler, U. The IGS MGEX experiment as a milestone for a comprehensive multi-GNSS service. In Proceedings of the ION Pacific PNT Conference, Honolulu, Hawaii, 23–25 April 2013; pp. 289–295. [Google Scholar]
- Montenbruck, O.; Steigenberger, P.; Prange, L.; Deng, Z.; Zhao, Q.; Perosanz, F.; Romero, I.; Noll, C.; Stürze, A.; Weber, G.; Schmid, R.; MacLeod, K.; Schaer, S. The Multi-GNSS Experiment (MGEX) of the International GNSS Service (IGS)–achievements, prospects and challenges. Adv. Space Res. 2017, 59, 1671–1697. [Google Scholar] [CrossRef]
- Guo, F.; Li, X.; Zhang, X.; Wang, J. The contribution of Multi-GNSS Experiment (MGEX) to precise point positioning. Adv. Space Res. 2017, 59, 2714–2725. [Google Scholar] [CrossRef]
- Montenbruck, O.; Steigenberger, P.; Khachikyan, R.; Weber, G.; Langley, R.; Mervart, L.; Hugentobler, U. IGS-MGEX: preparing the ground for multi-constellation GNSS science. Inside GNSS 2014, 9, 42–49. [Google Scholar]
- Steigenberger, P.; Hugentobler, U.; Loyer, S.; Perosanz, F.; Prange, L.; Dach, R.; Uhlemann, M.; Gendt, G.; Montenbruck, O. Galileo orbit and clock quality of the IGS Multi-GNSS Experiment. Adv. Space Res. 2015, 55, 269–281. [Google Scholar] [CrossRef]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise orbit determination for quad-constellation satellites at Wuhan University: strategy, result validation, and comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Tegedor, J.; Øvstedal, O.; Vigen, E. Precise orbit determination and point positioning using GPS, Glonass, Galileo and BeiDou. J. Geodetic Sci. 2014, 4. [Google Scholar] [CrossRef]
- Cai, C.; Gao, Y.; Pan, L.; Zhu, J. Precise point positioning with quad-constellations: GPS, BeiDou, GLONASS and Galileo. Adv. Space Res. 2015, 56, 133–143. [Google Scholar] [CrossRef]
- Li, X.; Zhang, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Precise positioning with current multi-constellation global navigation satellite systems: GPS, GLONASS, Galileo and BeiDou. Sci. Rep. 2015, 5, 8328. [Google Scholar] [CrossRef] [PubMed]
- Elsobeiey, M.; Al-Harbi, S. Performance of real-time Precise Point Positioning using IGS real-time service. GPS Solut. 2016, 20, 565–571. [Google Scholar] [CrossRef]
- Weber, G.; Mervart, L.; Lukes, Z.; Rocken, C.; Dousa, J. Real-time clock and orbit corrections for improved point positioning via NTRIP. In Proceedings of the ION GNSS 20th International Technical Meeting of the Satellite Division, Fort Worth, TX, USA, 25–28 September 2007. [Google Scholar]
- Caissy, M.; Agrotis, L.; Weber, G.; Hernandez-Pajares, M.; Hugentobler, U. Coming soon: the international GNSS real-time service. GPS World 2012, 23, 52–58. [Google Scholar]
- RTCM Special Committee. RTCM Standard 10403.3 differential GNSS (Global Navigation Satellite Systems) Services-Version 3; No. 104; RTCM: Arlington, TX, USA, 2016. [Google Scholar]
- Lu, C.; Chen, X.; Liu, G.; Dick, G.; Wickert, J.; Jiang, X.; Zheng, K.; Schuh, H. Real-time tropospheric delays retrieved from multi-GNSS observations and IGS real-time product streams. Remote Sens. 2017, 9, 1317. [Google Scholar] [CrossRef]
- Laurichesse, D.; Blot, A. Fast PPP convergence using multi-constellation and triple-frequency ambiguity resolution. In Proceedings of the ION GNSS 2016, Portland, OR, USA, 12–16 September 2016. [Google Scholar]
- Kazmierski, K.; Sośnica, K.; Hadas, T. Quality assessment of multi-GNSS orbits and clocks for real-time precise point positioning. GPS Solut. 2018, 22. [Google Scholar] [CrossRef]
- Hadas, T.; Bosy, J. IGS RTS precise orbits and clocks verification and quality degradation over time. GPS Solut. 2015, 19, 93–105. [Google Scholar] [CrossRef]
- Agrotis, L.; San, P.A.; Dow, J.; Zandbergen, R.; Svehla, D.; Ballereau, A. ESOC’s RETINA system and the generation of the IGS RT combination. In Proceedings of the IGS Workshop, Newcastle Upon Tyne, UK, 28 June–2 July 2010. [Google Scholar]
- Ge, M.; Chen, J.; Douša, J.; Gendt, G.; Wickert, J. A computationally efficient approach for estimating high-rate satellite clock corrections in realtime. GPS Solut. 2012, 16, 9–17. [Google Scholar] [CrossRef]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Walse, E. GNSS—Global Navigation Satellite Systems: GPS, GLONASS, Galileo, and More; Springer: New York, NY, USA, 2008. [Google Scholar]
- Pan, Z.; Chai, H.; Kong, Y. Integrating multi-GNSS to improve the performance of precise point positioning. Adv. Space Res. 2017. [Google Scholar] [CrossRef]
- Kouba, J. A Guide to Using International GNSS Service (IGS) Products. Available online: http://acc.igs.org/UsingIGSProductsVer21.pdf (accessed on 19 February 2018).
- Liu, T.; Yuan, Y.; Zhang, B.; Wang, N.; Tan, B.; Chen, Y. Multi-GNSS precise point positioning (MGPPP) using raw observations. J. Geod. 2017, 91, 253–268. [Google Scholar] [CrossRef]
- Böhm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2016, 33, L07304. [Google Scholar] [CrossRef]
- Kalman, R.E.; Bucy, R.S. New results in linear filtering and prediction theory. J. Basic Eng. 1961, 83, 95–108. [Google Scholar] [CrossRef]
- Prange, L.; Orliac, E.; Dach, R.; Arnold, D.; Beutler, G.; Schaer, S.; Jäggi, A. CODE’s five-system orbit and clock solution—the challenges of multi-GNSS data analysis. J. Geod. 2017, 91, 345–360. [Google Scholar] [CrossRef]
- Wanninger, L.; Beer, S. BeiDou satellite-induced code pseudorange variations: diagnosis and therapy. GPS Solut. 2016, 19, 639–648. [Google Scholar] [CrossRef]
- Saastamoinen, J. Atmospheric correction for the troposphere and stratosphere in radio ranging of satellites in the user of artificial satellites for geodesy. Geophys. Monogr. Ser. 1972. [Google Scholar] [CrossRef]
- Petit, G.; Luzum, B. IERS Conventions 2010; Verlag des Bundesamts für Kartographie und Geodäsie: Frankfurt am Main, Germany, 2010. [Google Scholar]
- Wu, J.T.; Wu, S.C.; Hajj, G.A.; Bertiger, W.I.; Lichten, S.M. Effects of antenna orientation on GPS carrier phase. Astrodynamics 1992, 18, 1647–1660. [Google Scholar]
- Nicolini, L.; Caporali, A. Investigation on reference frames and time systems in multi-GNSS. Remote Sens. 2018, 10, 80. [Google Scholar] [CrossRef]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P.; Hugentobler, U.; Teunissen, P.; Nakamura, S. Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solut. 2013, 17, 211–222. [Google Scholar] [CrossRef]
- Kazmierski, K.; Hadas, T.; Sośnica, K. Weighting of multi-GNSS observations in real-time precise point positioning. Remote Sens. 2018, 10, 84. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Products/Streams | Supported Systems | Generator | Software |
|---|---|---|---|
| IGS01 | GPS | Single-Epoch Combination | RETINA |
| IGS02 | GPS | Kalman-Filter Combination | BNC |
| IGS03 | GPS, GLONASS | Kalman-Filter Combination | BNC |
| CLK10 | GPS | BKG | RTNet + BNC |
| CLK11 | GPS, GLONASS | BKG | RTNet + BNC |
| CLK16 | GPS | WHU | PANDA + BNC |
| CLK20 | GPS | GSOC/DLR | RETICLE |
| CLK22 | GPS | NRCan | HPGPSC |
| CLK53 | GPS | ESA/ESOC | RETINA + BNC |
| CLK70 | GPS | GFZ | Epos-RT + BNC |
| CLK80 | GPS, GLONASS | GMV | magicGNSS |
| CLK91 | GPS, GLONASS | CNES | PPP-Wizard + BNC |
| CLK93 | GPS, GLONASS, GALILEO, BDS | CNES | PPP-Wizard + BNC |
| Items | Models/Strategies |
|---|---|
| Processing mode | Real-time (receiving real-time data streams in RTCM format via NTRIP); |
| Observations | Ionospheric-free linear combination code and carrier-phase measurements; |
| Constellations | GPS/GLONASS/BDS/GALILEO; |
| Signal frequencies | GPS/GLONASS: L1&L2; BDS: B1&B2; GALILEO: E1&E5a; |
| Estimator | Extended Kalman Filter (EKF) [31]; |
| Data interval | 1 s; |
| Elevation cutoff angle | 7°; |
| Stochastic model and weighing strategy | A priori precision of 1.0 cm and 1.0 m for carrier-phase and pseudo-range; The elevation-dependent stochastic model is applied; The standard deviation ratio among GPS, GLONASS, BDS, and GALILEO observations are set to 1:2:2:2; Down-weighting for GLONASS pseudo-range to reduce the effect of IFBs; Down-weighting for BDS GEO satellites due to the poor qualities of their orbit and clock products; |
| Precise satellite orbits and clocks | Derived from real-time streams: CLK93 (APC) + broadcast ephemeris (RTCM3EPH-MGEX); |
| Receiver antenna phase center | PCO and PCV values for GPS and GLONASS from igs14.atx file are used; Corrections for BDS and GALILEO are assumed the same as those for GPS since the precise corrections are not currently available [12,29]; Considering the elevation and azimuth dependent terms; |
| Code biases | Using CODE’s DCB products to correct the satellite-end P1C1 differential code biases (DCB) [32]; The elevation- and frequency-dependent corrections are applied for BDS code measurements [33]; |
| Ionospheric delay | Using the IFLC model to eliminate the first-order ionospheric delay; |
| Zenith tropospheric delay | A priori value provided by Saastamonien model [34]; Estimated as random-walk noise (10−8 m2/s); The Global Mapping Function [30] is applied; The troposphere gradient parameters in north and east directions are also estimated; |
| Tidal effects | Corrected by IERS Convention 2010, including solid earth tide and ocean tide loading [35]; |
| Phase windup | Corrected [36]; |
| Station coordinates | Estimated as white noises in simulated kinematic mode; |
| Receiver clock offset and ISBs | Estimated as white noise; |
| Phase ambiguities | Estimated as real value; |
| Cycle slips | Detected by the Melbourne-Wübbena (MW) combination and Geometry-Free (GF) combination. |
| Station | Location | Receiver | Antenna | Combined Systems |
|---|---|---|---|---|
| FFMJ | Germany | TRIMBLE NETR9 | LEIAR25.R4 + LEIT | G |
| POTS | Germany | JAVAD TRE_G3TH DELTA | JAV_RINGANT_G3T + NONE | G/R |
| SIN1 | Singapore | TRIMBLE NETR9 | LEIAR25.R3 + LEIT | G/R/C/E |
| No. | Station | Receiver | Antenna | Combined Systems |
|---|---|---|---|---|
| 1 | FFMJ | JAVAD TRE_G3TH DELTA | LEIAR25.R4 + LEIT | G |
| 2 | POTS | JAVAD TRE_G3TH DELTA | JAV_RINGANT_G3T + NONE | G/R |
| 3 | MRO1 | TRIMBLE NETR9 | TRM59800.00 + NONE | G/R/C |
| 4 | PNGM | TRIMBLE NETR9 | TRM59800.00 + NONE | G/R/C |
| 5 | COCO | SEPT POLARXS | AOAD/M_T + NONE | G/R/C |
| 6 | LAUT | TRIMBLE NETR9 | JAVRINGANT_DM + NONE | G/R/C |
| 7 | HRAG | JAVAD TRE_G3TH DELTA | LEIAR25.R3 + LEIT | G/R/E |
| 8 | STFU | JAVAD TRE_G3TH DELTA | TRM57971.00 + NONE | G/R/E |
| 9 | UCAL | TRIMBLE NETR9 | TRM57971.00 + NONE | G/R/E |
| 10 | GMSD | TRIMBLE NETR9 | TRM59800.00 + SCIS | G/R/E/C |
| 11 | KZN2 | TRIMBLE NETR9 | TRM59800.00 + SCIS | G/R/E/C |
| 12 | SIN1 | TRIMBLE NETR9 | LEIAR25.R3 + LEIT | G/R/E/C |
| No. | Station | Mean RMS (cm) | ||||
|---|---|---|---|---|---|---|
| E | N | U | H | 3D | ||
| 1 | FFMJ | 3.0 | 2.2 | 4.5 | 3.8 | 5.8 |
| 2 | POTS | 2.4 | 2.2 | 4.3 | 3.2 | 5.3 |
| 3 | STFU | 2.0 | 1.7 | 4.3 | 2.7 | 5.0 |
| 4 | UCAL | 3.0 | 2.4 | 5.5 | 3.8 | 6.7 |
| 5 | HRAG | 2.9 | 2.4 | 5.8 | 3.8 | 6.9 |
| 6 | COCO | 2.9 | 2.4 | 5.3 | 3.8 | 6.5 |
| 7 | LAUT | 2.8 | 2.4 | 4.9 | 3.7 | 6.2 |
| 8 | MRO1 | 2.7 | 2.6 | 4.3 | 3.7 | 5.6 |
| 9 | PNGM | 3.0 | 2.4 | 5.5 | 3.8 | 6.7 |
| 10 | GMSD | 2.5 | 1.8 | 4.6 | 3.1 | 5.6 |
| 11 | SIN1 | 2.6 | 1.8 | 4.9 | 3.2 | 5.8 |
| 12 | KZN2 | 2.5 | 2.6 | 4.3 | 3.6 | 5.5 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, L.; Li, Z.; Ge, M.; Neitzel, F.; Wang, Z.; Yuan, H. Validation and Assessment of Multi-GNSS Real-Time Precise Point Positioning in Simulated Kinematic Mode Using IGS Real-Time Service. Remote Sens. 2018, 10, 337. https://doi.org/10.3390/rs10020337
Wang L, Li Z, Ge M, Neitzel F, Wang Z, Yuan H. Validation and Assessment of Multi-GNSS Real-Time Precise Point Positioning in Simulated Kinematic Mode Using IGS Real-Time Service. Remote Sensing. 2018; 10(2):337. https://doi.org/10.3390/rs10020337
Chicago/Turabian StyleWang, Liang, Zishen Li, Maorong Ge, Frank Neitzel, Zhiyu Wang, and Hong Yuan. 2018. "Validation and Assessment of Multi-GNSS Real-Time Precise Point Positioning in Simulated Kinematic Mode Using IGS Real-Time Service" Remote Sensing 10, no. 2: 337. https://doi.org/10.3390/rs10020337