An Accelerated Backprojection Algorithm for Monostatic and Bistatic SAR Processing





Abstract
:
1. Introduction
2. Description of the Fast BP Algorithm
2.1. Fundamental Concept
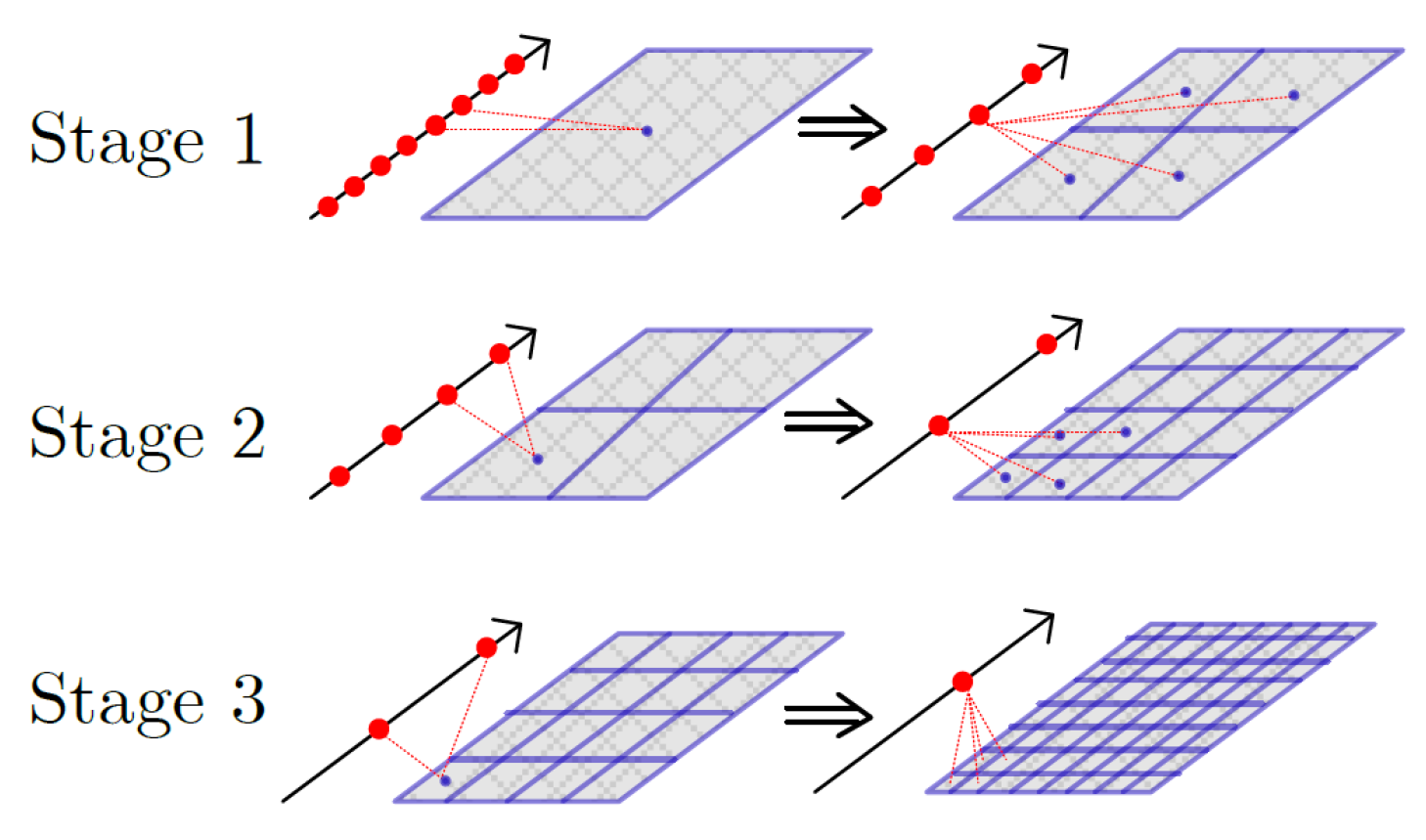
2.2. Subaperture Processing
3. Accelerated BP Algorithm
3.1. Fundamental Concept
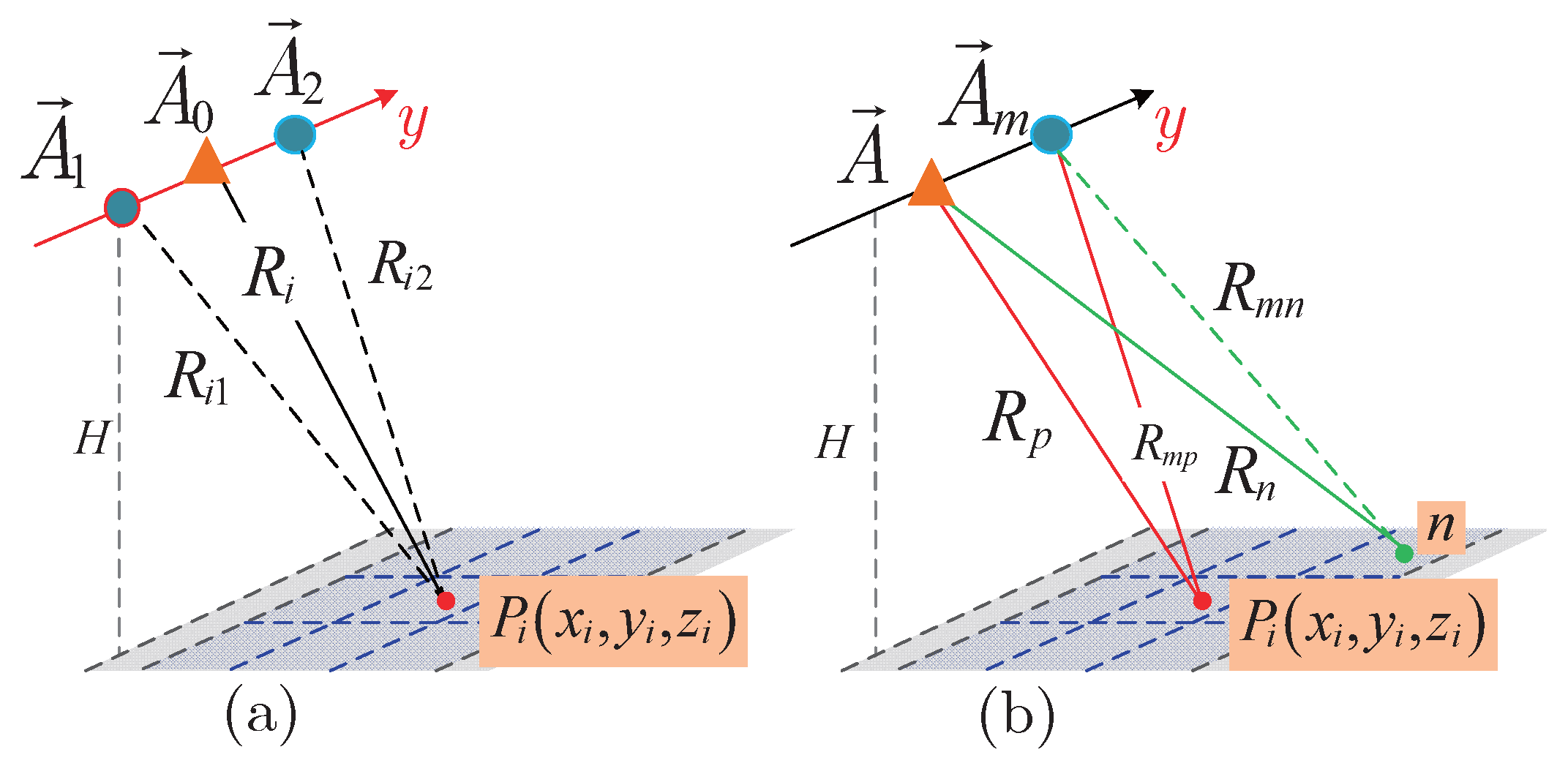
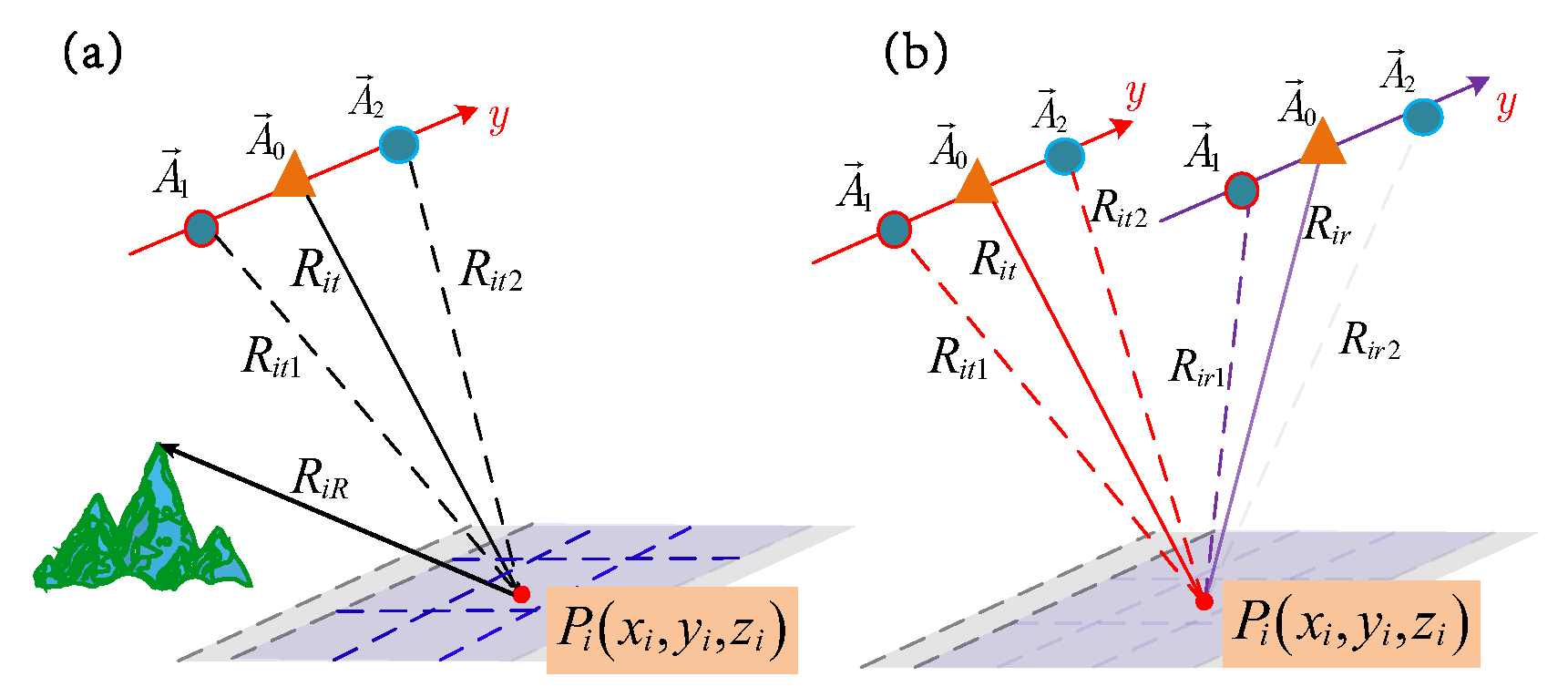
3.2. Monostatic SAR Case
3.3. Bistatic SAR Case
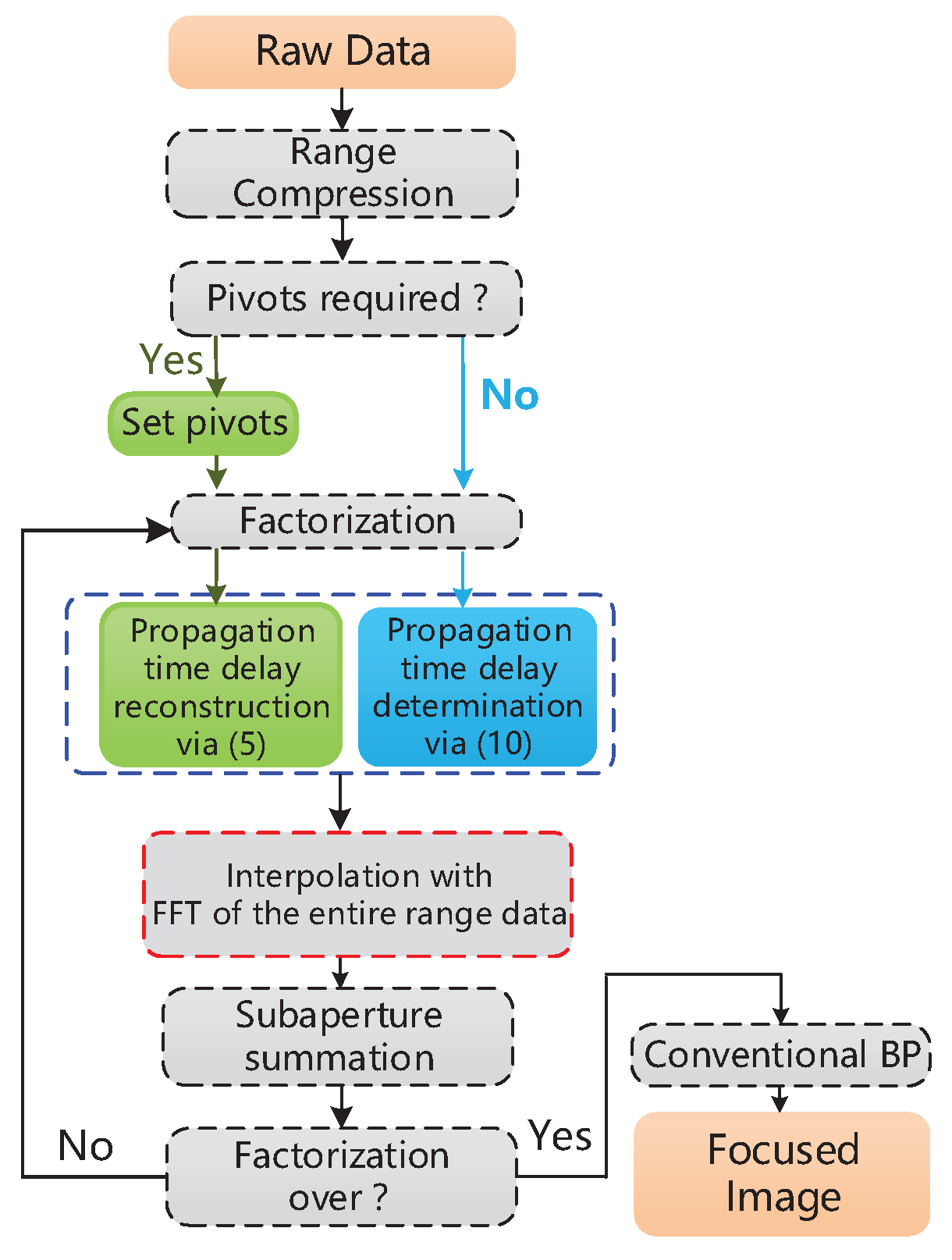
3.4. Summary of the Algorithm
4. Performance Analysis
4.1. Error Analysis
4.2. Parallelization
4.3. Computational Complexity
4.4. Pivot Selection Issue
5. Simulation and Real Data Results
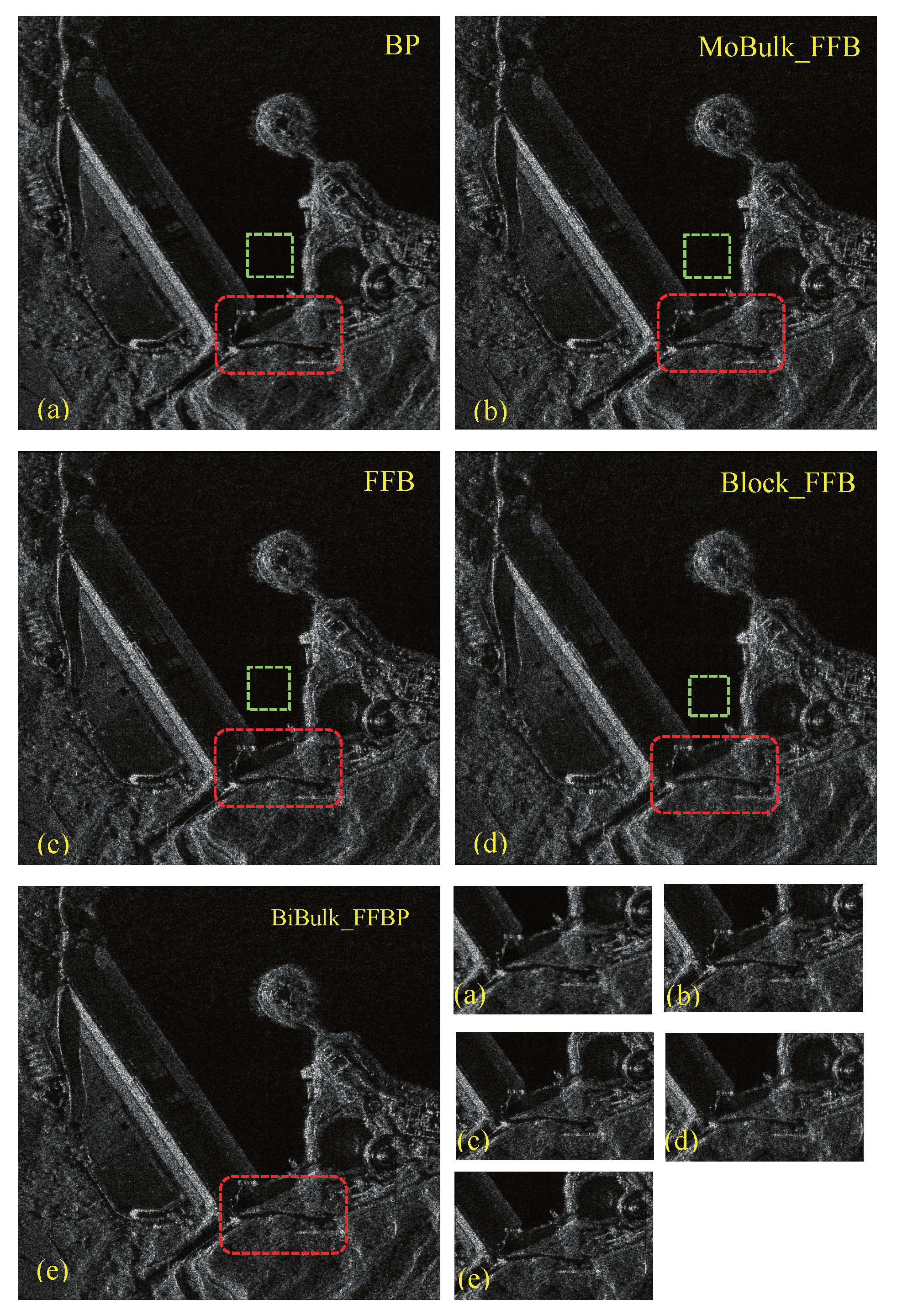
5.1. Monostatic SAR Case
5.2. Bistatic SAR Case
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Franceschetti, G.; Lanari, R. Synthetic Aperture Radar Processing; CRC Press: Boca Raton, FL, USA, 1999; pp. 32–58. [Google Scholar]
- Cumming, I.G.; Bennett, J. Digital processing of SeaSAT SAR data. In Proceedings of the IEEE International Conference on ICASSP ’79 Acoustics, Speech, and Signal Processing, Washington, DC, USA, 2–4 April 1979; pp. 710–718. [Google Scholar]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR processing using chirp scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- Carrara, W.G.; Majewski, R.M.; Goodman, R.S. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms; Artech House: Norwood, MA, USA, 1995. [Google Scholar]
- Bamler, R.; Eineder, M. ScanSAR processing using standard high precision SAR algorithms. IEEE Trans. Geosci. Remote Sens. 1996, 34, 212–218. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A. Spotlight SAR processing using the extended chirp scaling algorithm. In Proceedings of the 1997 IEEE International IGARSS’97, Remote Sensing—A Scientific Vision for Sustainable Development, Singapore, 3–8 August 1997; pp. 2021–2023. [Google Scholar]
- Loffeld, O.; Nies, H.; Peters, V.; Knedlik, S. Models and useful relations for bistatic SAR processing. IEEE Trans. Geosci. Remote Sens. 2004, 42, 2031–2038. [Google Scholar] [CrossRef]
- Natroshvili, K.; Loffeld, O.; Nies, H.; Ortiz, A.M.; Knedlik, S. Focusing of general bistatic SAR configuration data with 2-D inverse scaled FFT. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2718–2727. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Nies, H.; Knedlik, S.; Ender, J.H.G. Chirp-scaling algorithm for bistatic SAR data in the constant-offset configuration. IEEE Trans. Geosci. Remote Sens. 2009, 47, 952–964. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.H.; Cumming, I.G. Processing of azimuth-invariant bistatic SAR data using the range Doppler algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 14–21. [Google Scholar] [CrossRef]
- Bamler, R.; Meyer, F.; Liebhart, W. Processing of bistatic SAR data from quasi-stationary configurations. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3350–3358. [Google Scholar] [CrossRef]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing bistatic SAR data using the nonlinear chirp scaling algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef]
- Qiu, X.; Hu, D.; Ding, C. An improved NLCS algorithm with capability analysis for one-stationary BiSAR. IEEE Trans. Geosci. Remote Sens. 2008, 46, 3179–3186. [Google Scholar] [CrossRef]
- Zeng, T.; Hu, C.; Wu, L.; Liu, L.; Tian, W.; Zhu, M.; Long, T. Extended NLCS algorithm of BiSAR systems with a squinted transmitter and a fixed receiver: Theory and experimental confirmation. IEEE Trans. Geosci. Remote Sens. 2013, 51, 5019–5030. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Nies, H.; Ender, J.H.G. Focusing spaceborne/airborne hybrid bistatic SAR data using wavenumber-domain algorithm. IEEE Trans. Geosci. Remote Sens. 2009, 47, 2275–2283. [Google Scholar] [CrossRef]
- Tang, J.; Deng, Y.; Wang, R.; Zhao, S.; Li, N.; Wang, W. A weighted backprojection algorithm for azimuth multichannel SAR imaging. IEEE Geosci. Remote Sens. Lett. 2016, 13, 1265–1269. [Google Scholar] [CrossRef]
- Behner, F.; Reuter, S.; Nies, H.; Loffeld, O. Synchronization and processing in the HITCHHIKER bistatic SAR experiment. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 1028–1035. [Google Scholar] [CrossRef]
- Yegulalp, A.F. Fast backprojection algorithm for synthetic aperture radar. In Proceedings of the The Record of the 1999 IEEE Radar Conference, Waltham, MA, USA, 22 April 1999; pp. 60–65. [Google Scholar]
- Ulander, L.M.H.; Hellsten, H.; Stenstrom, G. Synthetic-aperture radar processing using fast factorized back-projection. IEEE Trans. Geosci. Remote Sens. 2003, 39, 760–776. [Google Scholar] [CrossRef]
- Rodriguez-Cassola, M.; Baumgartner, S.V.; Krieger, G.; Moreira, A. Bistatic TerraSAR-X/F-SAR spaceborne/airborne SAR experiment: Description, data processing, and results. IEEE Trans. Geosci. Remote Sens. 2010, 48, 781–794. [Google Scholar] [CrossRef] [Green Version]
- Duque, S.; Lopez-Dekker, P.; Mallorqui, J.J. Single-pass bistatic SAR interferometry using fixed-receiver configurations: Theory and experimental validation. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2740–2749. [Google Scholar] [CrossRef] [Green Version]
- Walterscheid, I.; Espeter, T.; Brenner, A.R.; Klare, J.; Ender, J.H.G.; Nies, H.; Wang, R.; Loffeld, O. Bistatic SAR experiments with PAMIR and TerraSAR-x;setup, processing, and image results. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3268–3279. [Google Scholar] [CrossRef]
- Vu, V.T.; Sjogren, T.K.; Pettersson, M.I. Fast time-domain algorithms for UWB bistatic SAR processing. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1982–1994. [Google Scholar] [CrossRef]
- Rodriguez-Cassola, M.; Prats, P.; Krieger, G.; Moreira, A. Efficient time-domain image formation with precise topography accommodation for general bistatic SAR configurations. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 2949–2966. [Google Scholar] [CrossRef] [Green Version]
- Shao, Y.; Wang, R.; Deng, Y.; Liu, Y.; Chen, R.; Liu, G.; Loffeld, O. Fast backprojection algorithm for bistatic SAR imaging. IEEE Geosci. Remote Sens. Lett. 2013, 10, 1080–1084. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation; Artech House: Norwood, MA, USA, 2005; pp. 32–58. [Google Scholar]
- Wang, R.; Loffeld, O.; Neo, Y.L.; Nies, H.; Walterscheid, I.; Espeter, T.; Klare, J.; Ender, J.H.G. Focusing bistatic SAR data in airborne/stationary configuration. IEEE Trans. Geosci. Remote Sens. 2010, 48, 452–465. [Google Scholar] [CrossRef]
- Walterscheid, I.; Ender, J.H.G.; Brenner, A.R.; Loffeld, O. Bistatic SAR processing and experiments. IEEE Trans. Geosci. Remote Sens. 2010, 44, 2710–2717. [Google Scholar] [CrossRef]
- Shi, J.; Long, X.; Zhang, X. Streaming BP for non-linear motion compensation SAR imaging based on GPU. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 2035–2050. [Google Scholar] [CrossRef]
- Di Bisceglie, M.; Di Santo, M.; Galdi, C.; Lanari, R.; Ranaldo, N. Synthetic aperture radar processing with GPGPU. IEEE Signal. Proc. Mag. 2010, 27, 69–78. [Google Scholar] [CrossRef]
- Kluge, T. Pricing Swing Options and Other Electricity Derivatives. Ph.D. Dissertation, St Hugh’s College, University of Oxford, Oxford, UK, 2006. Available online: http://kluge.in-chemnitz.de/docs/phd/ (accessed on 11 July 2006).
- Nies, H.; Loffeld, O.; Na, K.; Natroshvili, F. Analysis and focusing of bistatic airborne SAR data. IEEE Trans. Geosci. Remote Sens. 2007, 45, 3342–3349. [Google Scholar] [CrossRef]
- Mao, X.; Zhu, D.; Zhu, Z. Autofocus correction of ape and residual rcm in spotlight SAR polar format imagery. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2693–2706. [Google Scholar] [CrossRef]
- Zhang, H.; Deng, Y.; Wang, R.; Li, N.; Zhao, S.; Hong, F.; Wu, L.; Loffeld, O. Spaceborne/stationary bistatic SAR imaging with TerraSAR-X as an illuminator in staring-spotlight modeAnalysis and focusing of bistatic airborne SAR data. IEEE Trans. Geosci. Remote Sens. 2007, 54, 5203–5214. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Carrier frequency (GHz) | 9.6 |
| Bandwidth (MHz) | 400 |
| PRF (Hz) | 160 |
| Platform height (km) | 10 |
| Look angle (°) | 4 |
| Velocity (m/s) | 120 |
| Azimuth steering angle (°) | ±1.62 |
| IRW (dB) | PSLR (dB) | ISLR (dB) | SNR (dB) | |
|---|---|---|---|---|
| FFBP | (Rg)0.53/(Az)0.28 | (Rg)-12.35/(Az)-13.04 | (Rg)-9.82/(Az)-9.7 | 52.61 |
| Block_FFBP | (Rg)0.53/(Az)0.28 | (Rg)-12.36/(Az)-13.11 | (Rg)-6.9254/(Az)-10.1 | 50.25 |
| MoBulk_FFBP | (Rg)0.53/(Az)0.28 | (Rg)-12.33/(Az)-12.99 | (Rg)-10.93/(Az)-9.58 | 53.39 |
| Items | Values |
|---|---|
| CPU | Xeon E5620 |
| Clock speed | 2.4 GHz |
| Memory | 192 GB |
| Parameter | Values |
|---|---|
| Carrier frequency (GHz) | 9.6 |
| Bandwidth (MHz) | 150 |
| Sampling rate (MHz) | 180 |
| Pulse repetition frequency (Hz) | 8000 |
| Synthetic aperture time (s) | 1.27 |
| Transmitter center position (km) | (0, 400, 692.8203) |
| Synchronization channel position (m) | (0, 0, 533) |
| Echo channel position (m) | (0, 0, 533) |
| Target for evaluation (m) | (−320, −9216, 0) |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Tang, J.; Wang, R.; Deng, Y.; Wang, W.; Li, N. An Accelerated Backprojection Algorithm for Monostatic and Bistatic SAR Processing. Remote Sens. 2018, 10, 140. https://doi.org/10.3390/rs10010140
Zhang H, Tang J, Wang R, Deng Y, Wang W, Li N. An Accelerated Backprojection Algorithm for Monostatic and Bistatic SAR Processing. Remote Sensing. 2018; 10(1):140. https://doi.org/10.3390/rs10010140
Chicago/Turabian StyleZhang, Heng, Jiangwen Tang, Robert Wang, Yunkai Deng, Wei Wang, and Ning Li. 2018. "An Accelerated Backprojection Algorithm for Monostatic and Bistatic SAR Processing" Remote Sensing 10, no. 1: 140. https://doi.org/10.3390/rs10010140
APA StyleZhang, H., Tang, J., Wang, R., Deng, Y., Wang, W., & Li, N. (2018). An Accelerated Backprojection Algorithm for Monostatic and Bistatic SAR Processing. Remote Sensing, 10(1), 140. https://doi.org/10.3390/rs10010140