1. Introduction
Sustainability research faces many challenges as respective environmental, urban and regional contexts are experiencing rapid changes at an unprecedented spatial granularity level, which involves growing massive data and the need for spatial relationship detection at a faster pace. The amount and diversity of new data sources have grown dramatically in complex ways at degrees of detail and scope unthinkable until now. As a fundamental method of spatial analysis, spatial join relates an object or event at a certain location to other related data sources in the spatial context. Spatial join links unrelated data using space and, thus, integrates knowledge from scattered sources. It can make data more informative and reveal patterns that may be invisible [
1]. For example, researchers quantify the contextual determinants of human behaviors and place-based information by analyzing data from mobile-phone subscribers, social media, floating cars, etc. [
2,
3,
4,
5,
6]. The size of spatial data has grown dramatically. For instance, in China, the second national land survey has produced about 150 million polygons and 100 million linear roads yearly since 2007. In addition, the first national geography census produced about 2.4 trillion bytes of vector data. These datasets provide a goldmine for sustainability studies across spatial scales. However, existing spatial join tools can only deal with a limited amount of data due to computation constraints. In the face of such massive spatial data, the performance of traditional spatial join algorithms encounters a serious bottleneck. There is a growing consensus that improvements in high-performance computation will pave the new direction for distributed spatial analysis [
7]. By deploying a high-performance spatial join computing framework, this study demonstrates that it is promising to leverage cutting-edge computing power for large-scale spatial relationship analysis.
Analyzing the spatial relationship among large-scale datasets in an interdisciplinary, collaborative and timely manner requires an innovative design of algorithms and computing resources. The solutions to these research challenges may facilitate a paradigm shift in spatial analysis methods. The research agenda is being substantially transformed and redefined in light of the data size and computing speed, which can transform the focus of suitability science towards human-environment dynamics in the high-performance computing environment.
Parallelization is an effective method for improving the efficiency of spatial joins [
8,
9,
10,
11]. With the emergence of cloud computing, many studies use open source big data computing frameworks, such as Hadoop MapReduce [
12] and Apache Spark [
13], to improve spatial join efficiency. These Hadoop-like spatial join algorithms including SJMR (Spatial Join with MapReduce) [
14], DJ (Distributed Join) in SpatialHadoop [
15] and Hadoop-GIS [
16]. However, all of them need data preprocessing and cannot perform the entire spatial join in a single MapReduce job; hence, these methods may result in significant disk I/O and additional communication costs. SpatialSpark [
17] uses Spark to implement broadcast-based spatial join and partition-based spatial join, then performs an in-depth comparison with SpatialHadoop and Hadoop-GIS [
18]. Inheriting the advantages, such as low disk I/O and in-memory computing, of Spark, SpatialSpark improves the join efficiency significantly.
For distributed spatial join in a Hadoop-like framework, spatial data partition is a key point that affects the performance of spatial join. All current algorithms use the following method to do spatial partition: (1) sample the datasets to reduce the data volume; (2) create a spatial index on one or both dataset; (3) use the spatial index to partition the datasets or map the indexes, then do global join directly. However, all of the methods partition the datasets based on the spatial index, which considers the data size or number of data only, which may cause the processing skew of each partition. SpatialSpark partitions both input datasets with the spatial index of one dataset, thus resulting in an imbalance because of the data skew mismatch of the two datasets. Furthermore, both sampling and spatial indexing require extra computing cost, which is expensive, especially for the MapReduce framework. Faced with massive vector data, the performances of current Hadoop-like spatial join algorithms run into a bottleneck.
Based on the analysis of existing Hadoop-like high-performance spatial join algorithms, we found that the key factors for improving the performance of spatial join are: (1) simplification of the spatial partitioning algorithm to reduce the preprocessing time; (2) optimization of the partition results for both CPU and memory requirements; and (3) improvement of the performance of the local join algorithm. In this study, we propose a new spatial join method with Spark: Spatial Join with Spark (SJS). SJS uses a proven, extremely efficient fixed uniform grid to partition the datasets. Global join is achieved through built-in join transformation. Utilizing the iterative computation of Spark, we propose a calculation evaluating model and in-memory spatial repartition technology, which refine the initial partition results of both datasets to limit the processing time of each partition by estimating the time complexity of the local spatial join algorithm. In the last local join stage, we implement and compare the performances of plane-sweep join, R-tree, quadtree and R*-tree index nested-loop join. The experiments show that the R*-tree index nested-loop join is the best method with regard to high space utilization and query efficiency. From extensive experiments on real data, it is observed that SJS performs better than the earlier Hadoop-like spatial join approaches.
This research focuses on solving the computation challenge emerging from the large data size, which will serve as the solid foundation for further spatial analysis with other covariates and contextual information.
The main contributions of this study are as follows:
- (1)
We propose SJS, a universally-distributed spatial join method with Spark. Experiment results show that SJS exhibits better performance than the earlier Hadoop-like spatial join approaches.
- (2)
We utilize the in-memory iterative computing of Spark and present a non-disk I/O spatial repartition technology to optimize the initial partition based on the calculation-evaluating model.
- (3)
We make performance comparisons among four common in-memory spatial join algorithms in Spark and conclude that the R*-tree index nested-loop join exhibits better performance than other algorithms in a real big data environment.
3. Methods
This section describes a novel spatial join method, SJS, that combines the key concept of clone-join with index nested-loop join and is implemented with Spark. The SJS phases are summarized as follows:
- Phase 1.
Partition phase: perform parallel calculation of the partition IDs of the uniform grid for each spatial object.
- Phase 2.
Partition join phase: group the objects with the same partition ID in each dataset, and join the datasets with the same partition ID.
- Phase 3.
Repartition phase: evaluate the calculation costs of each partition, and repartition those partitions whose costs result in overrun.
- Phase 4.
In-memory join phase: perform the R*-tree index nested-loop join on each repartition.
Different from other Hadoop-like spatial join algorithms, the SJS partition phase does not perform additional tasks, such as data sampling and spatial index building on one or both datasets, and does not execute any partition packaging or sorting tasks, such as round-robin tile-to-partition mapping [
35] and Z-curve or Hilbert tile coding sort [
36]. The reason for this behavior is discussed in
Section 3.1. The partition join phase (similar to the global join phase) of SJS differs from MapReduce-based join methods because it uses a built-in join transform in Spark instead of separating the “IndexText” of the reduced input value. Next, the initial partition results are repartitioned by evaluating the time complexity of the in-memory join in each partition to decrease the process skew. All SJS repartition tasks are performed in memory with the RDD transformation, which improves the performance by eliminating the disk I/O. The in-memory join phase (similar to the local join phase) of SJS differs from the plane-sweep in SJMR or SpatialHadoop and the synchronous traversal of both R*-trees on each dataset in Hadoop-GIS. In this phase, SJS uses a single R*-tree index built on one dataset and traverses the other dataset in order to perform the index nested-loop join. Duplicates are avoided using the reference point method before calculating.
3.1. Uniform Spatial Grid Partition
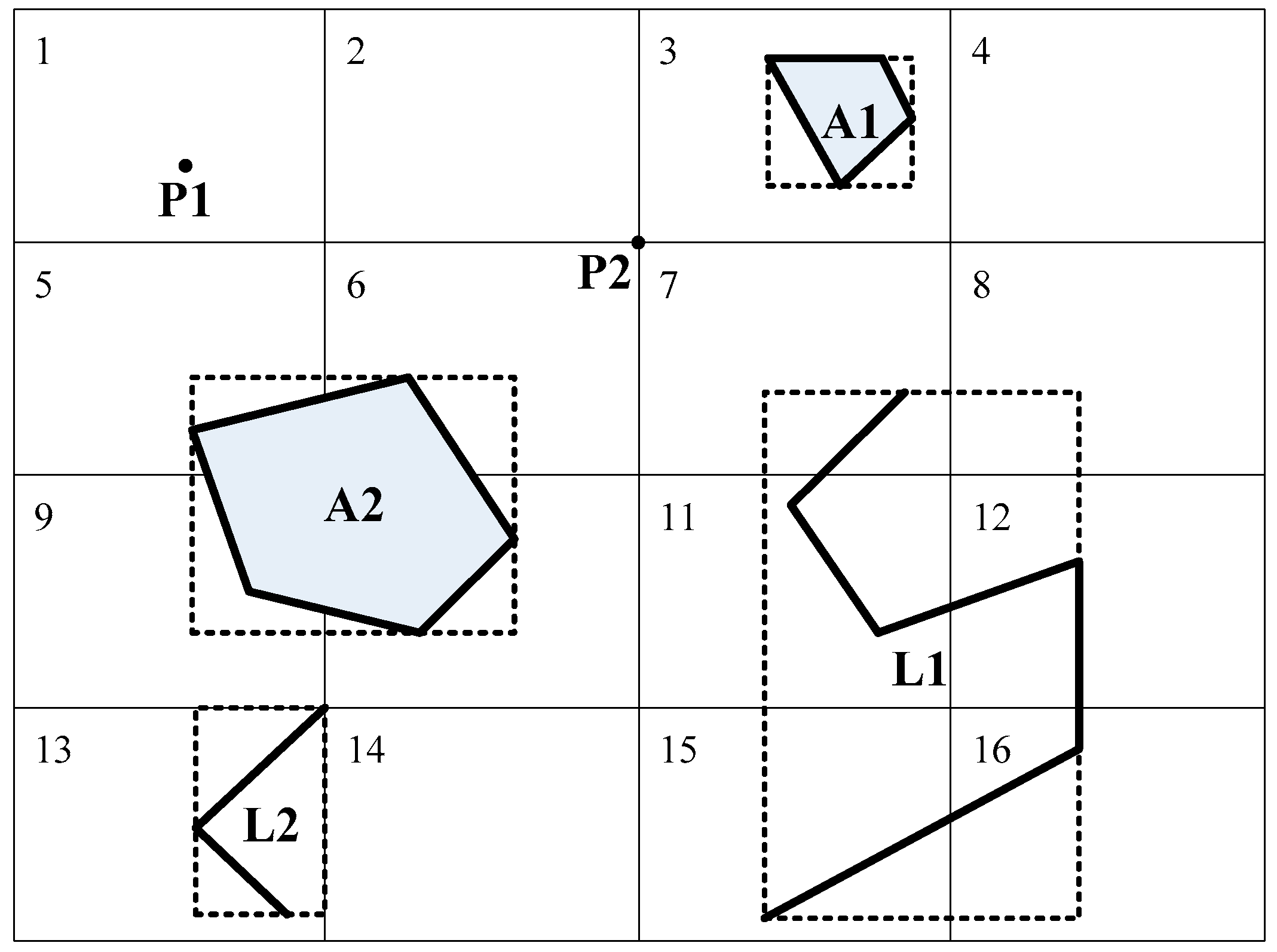
The goal of spatial partitioning is to reduce the data volume such that it fits in the memory and to perform coarse-grained parallel computing (bulk computing). As shown in
Figure 1, Grid Tiles 1–16 represent the uniform grids. The spatial objects are partitioned into the tile overlap with their MBRs.
Grid count is the key factor in the algorithm. If the number of grids is low, each partition fitting in the memory or the CPU computing requirements cannot be guaranteed. If the number of grids is high, the large number of duplicates could increase the calculation. Therefore, we determine the number of partitions in a manner similar to the method described in [
11]. Furthermore, we propose a dynamic spatial repartition technology to refine the partition result.
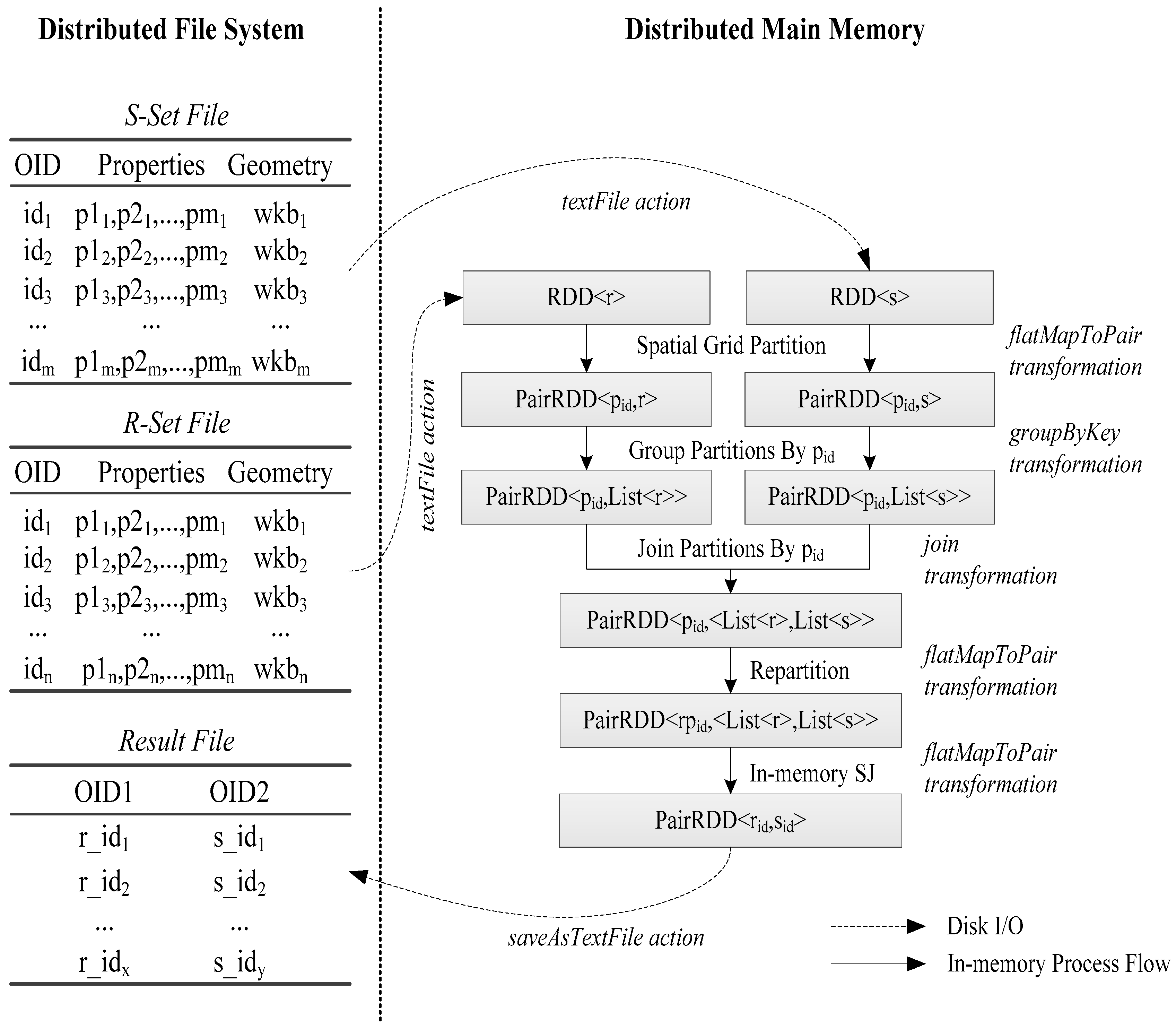
For datasets R and S stored in the distributed file system, we use the “textFile” action in Spark to read the files to RDDs cached in the distributed main memory. Then, the “flatMapToPair” transformation, indicated in Algorithm 1, is used to perform the spatial partitioning. Each flatMap calculates the grid tiles that overlap with their MBR. Then, the spatial partitioning phase returns the pairs of partition ID and geometry of each spatial object.
| Algorithm 1 Spatial Partitioning |
| PairRDD<Partition ID, Geometry>RDD<Geometry>.flatMapToPair(SpatialPartition) |
| Input: line: each line of spatial dataset file |
| Output: R: partitioned objects |
| Function SpatialPartition(line) |
| 1 |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
3.2. In-Memory Spatial Partition Join
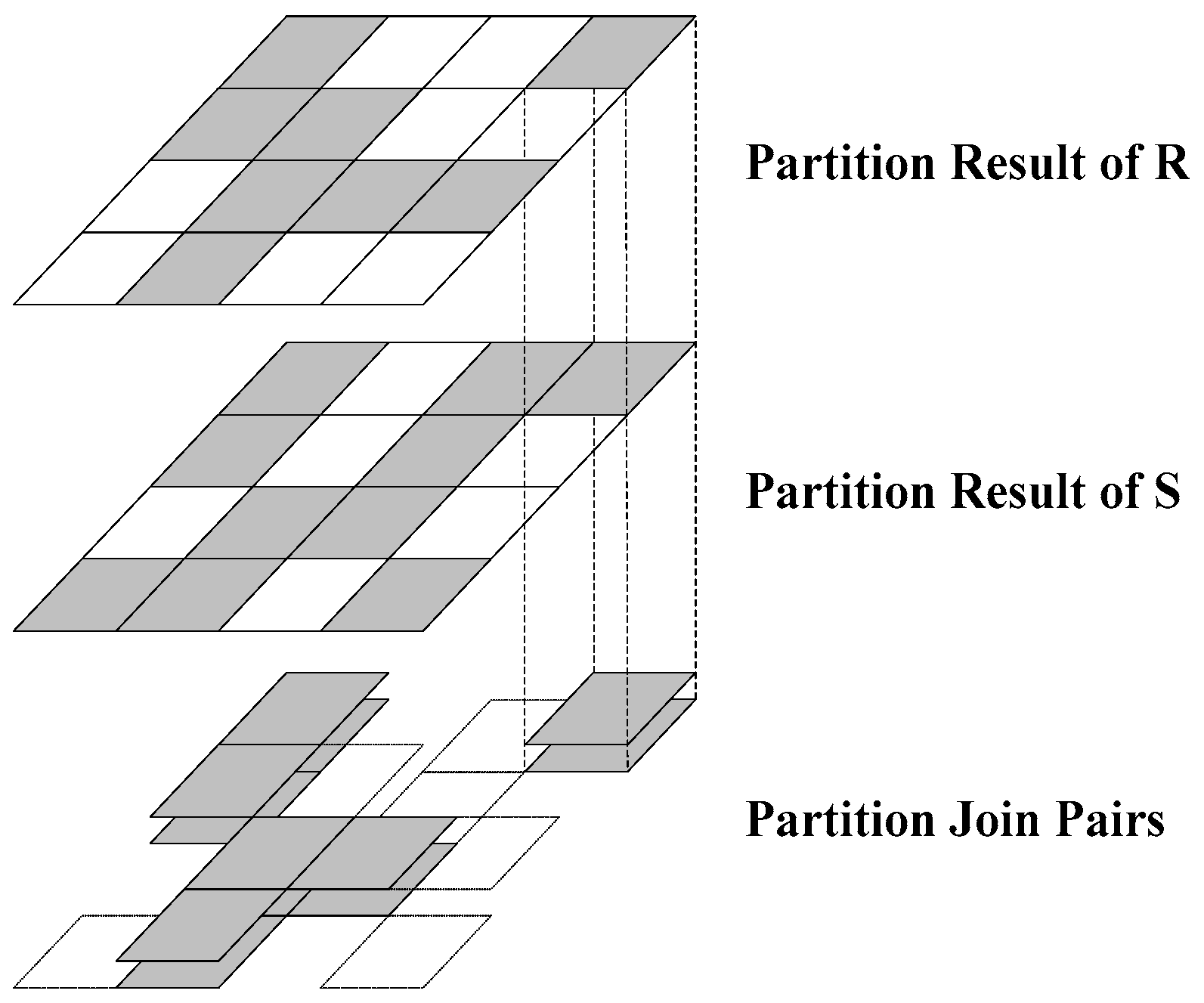
This phase consists of the following two steps. Step 1: group the spatial objects of both the datasets with the same partition ID using the “groupByKey” transformation in Spark. Step 2: use the “join” transformation to join both datasets with the same partition ID. As shown in
Figure 2, the first and second layers represent the R and S dataset partition groups, respectively. A gray tile implies that it contains at least one spatial object, whereas a white tile implies that there are no spatial objects inside it. The partitions are joined, and the result is shown in the third layer. The operation executes only on the partitions whose corresponding R and S partitions are gray. Partitions with only one or no gray partitions are removed from the main memory.
The spatial join operation of the entire R and S datasets is reduced to the join operation on the partition pairs; this is the first filter of the entire spatial join. By utilizing this feature, SJS reduces disk I/O costs further in the partition phase when compared with other spatial join techniques with MapReduce [
15,
16], where the objects in the dotted partition as shown in
Figure 2 are moved to the disk in order to execute the reduce function.
3.3. Calculation Evaluating-Based Spatial Repartition Technology
3.3.1. Spatial Repartition Strategy in Spark
From the previous two phases, we know that the proposed spatial partition refers to uniform grid tiles. As mentioned in
Section 3.1, the goal of spatial partitioning is to reduce the amount of data in order to accommodate data in the memory of nodes and to increase computational parallelism. However, based on the grids specified for the partitioning of spatial data and considering the data skew and data replication, partitions that contain an excessive number of spatial objects would directly affect the performance of the overall spatial join.
The traditional method is to reset the grid size and repartition the dataset to meet the requirements. However, this approach discards the initial partition computation, and the partition results after adjustment might still not meet the requirements. Another method is to optimize the partition strategy, by iteratively decomposing the tiles when the number of objects in the partition exceeds the threshold. This strategy contributes to limiting the size of data in each partition, but only works on one dataset, respectively, and requires an additional structure to map the partitions of two datasets. In particular, this strategy considers memory only; the uniform total number in each partition cannot guarantee uniform processing time, and thus, the CPU cost in each partition must be taken into consideration. In the most recent spatial join algorithms with MapReduce, the spatial partitioning occurs during the entire map stage or MapReduce job, and the partition results must be written to HDFS for subsequent calculations. When the partition fails, the entire process must be executed again, thus resulting in considerable unnecessary disk I/O.
The Directed Acyclic Graph (DAG) scheduler of Spark dispatches the calculation of each partition to those nodes whose current number of running tasks has not reached the maximum number. Thus, when a node completes a task, the next task is allocated to the node and executed immediately. The total number of tasks that run on each node is considerably fewer than the number of partitions; hence, the bottleneck of spatial join in Spark is the extremely large partition caused by data skew and not the lack of balance in the intensity of the partition. Therefore, we use grid tiles as partitions directly and the tile ID as the partition ID.
Based on this analysis, if data skew or a large number of data replications occur, the bottleneck of spatial join is the overhead from the calculation of partitions. When the original grid is not sufficiently appropriate, the large partition could lead to CPU overload. Hence, the repartition strategy for refinement in Spark must take the calculation amount of large partitions into consideration. We propose an improved in-memory spatial repartition method based on the calculation amount of local join algorithms in order to refine the partition results.
3.3.2. Calculation Evaluating Model
For partition
P, we define the calculation evaluating model as follows:
where
O denotes the time complexity of the algorithm;
n denotes the number of spatial objects in
P;
p denotes the total number of vertices of every object in
P, which also refers to the complexity of objects. For different algorithms, the valid parameters and parameter values are different. For instance:
- (1)
For the area calculating algorithm, the time complexity is only related to parameter
p:
- (2)
For the nested-loop spatial join algorithm, the time complexity is mainly related to parameter
n:
Here, since after partition join, each
P contains spatial objects belong to
R and
S, thus
n is expressed as tuple
.
denotes the number of spatial objects that belong to
R in
P, the same with
.
This study uses the calculation evaluating model to compute the calculation amount of each partition, then judges the partition for whether it needs repartition or not. Repartition is a course of iteration, so a Threshold Value (
TV) is imported to terminate recursion. For dataset
R, we define the Equation of
TV as follows:
where
N denotes the number of objects in
R;
S denotes the data size of
R;
M denotes the total allocated memory size of all nodes;
k denotes the ratio factor, which is determined by the algorithm. For the R*-tree index nested-loop spatial join algorithm, we set
k = 0.01 as the reference value.
3.3.3. Spatial Repartition Phase in SJS
In SJS, the partitions of two datasets are joined directly without any other correspondence or mapping, such that the repartition strategy can consider both datasets. Because the objects of two datasets are cached as forms of RDD in memory, disk I/O skew no longer exists. Thus, the repartition phase in SJS focuses mainly on the processing skew of each partition. In order to evaluate the calculation amount of the in-memory spatial join algorithm and estimate the CPU consumption of each partition, we choose the typical nested-loop spatial join to represent others. In the calculation evaluating model, we use Equation (4) to calculate the valuation. By setting a threshold value using Equation (5), the calculation amount of each partition is limited.
Spark supports iterative calculation with the same data; any intermediate results from the calculations are cached in memory in the form of RDD. We use the “flatMapToPair” transformation to transform the initially-partitioned RDD to the repartitioned RDD. As shown in Algorithm 2, first, the sizes of
R and
S within the current partition are calculated; if their product (the valuation) is greater than a preset threshold value, the current partition is divided into four equivalent sub-partitions, and the divide and replicate strategy is the same as that in the previous phase. If the product is less than the threshold value, the original partition is returned. Algorithm 2 executes recursively (Line 12) on each initial partition distributed among the nodes; the iterative processes need not communicate with each other. Thus, the in-memory spatial repartition technology completely utilizes the advantage of the in-memory computing architecture of Spark, and the disk I/O is reduced to a minimum. The repartition result is sufficient for the various in-memory join algorithms to execute the next phase.
| Algorithm 2 Dynamic In-Memory Spatial Repartition |
| PairRDD<pid, Tuple<RP, SP>>PairRDD<pid, Tuple<RP, SP>>.flatMapToPair (Repartition) |
| Input: RP, SP: two partial datasets in current partition; |
| pid: ID of current partition |
| Output: RP: the repartition result of the current partition |
| Data: TV: preset threshold value |
| Function Repartition (pid, RP, SP) |
| 1 |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
| 9 |
| 10 |
| 11 |
| 12 |
| 13 |
| 14 |
| 15 |
3.4. In-Memory Spatial Join
After the partition adjustment, theoretically, we can use any type of in-memory method to complete spatial join. All spatial entities have been cached as RDD, and hence, we can process the filter and refinement step of the spatial join synchronously. Furthermore, the traditional random access of data entities in the refinement stage, which could lead to high disk I/O costs, will be omitted. In this study, we implement four methods, i.e., the classic plane-sweep, in addition to the R-tree, R*-tree and quadtree index nested-loop join. Finally, we choose the R*-tree index for SJS because of its high space utilization and the retrieval speed. Several experiments show that the R*-tree index nested-loop join has better performance in most cases. The R*-tree nested-loop join is described as follows (see Algorithm 3):
| Algorithm 3 R*-Tree Nested-Loop Join |
| PairRDD<rid, sid>PairRDD<pid, Tuple<RP, SP>>.flatMapToPair(LocalJoin) |
| Input: pid: ID of current partition |
| RP, SP: two spatial datasets in the current partition; |
| Output: P: the spatial join result pairs of the current partition |
| Function LocalJoin(pid, RP, SP) |
| 1 |
| 2 |
| 3 |
| 4 |
| 5 |
| 6 |
| 7 |
| 8 |
| 9 |
| 10 |
| 11 |
where the
denotes the
ID of the current partition and
and
denote the sub-datasets of input datasets
R and
S, respectively, in partition
. First, the R*-tree index of
is built. Next, each spatial object
s in
is traversed; R*-tree is searched for the spatial objects in
whose MBR overlaps with the MBR of
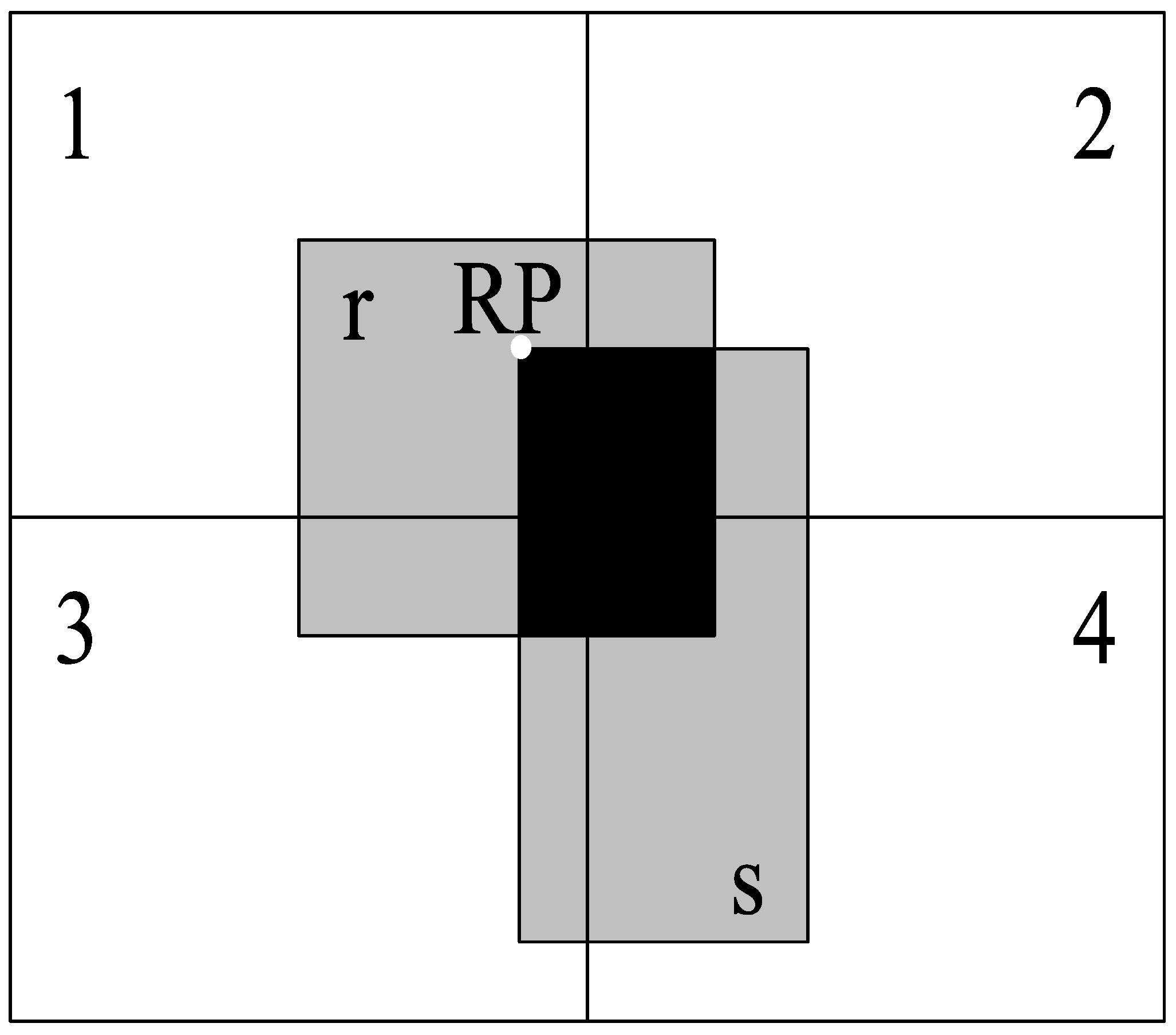
s. Prior to the spatial predicate verification, we use the reference point method [
37] to avoid duplicates. If the reference point of
r and
s is not in the partition, the current calculation is terminated. As shown in
Figure 3, the black area represents the intersect-MBR of spatial objects
r and
s; we define the left-top corner of the intersect-MBR as the reference point of
r and
s, i.e.,
RP.
RP lies in Partition 1. Hence, although the spatial objects
r and
s are divided into four partitions (as stated in
Section 3.1), the spatial relationship is calculated only in Partition 1. Thus, the calculations are not repeated for Partitions 2, 3 and 4.
Finally, if two spatial entities meet a predetermined spatial predicate, their ID pairs are the output, i.e., the in-memory spatial join result of the current partition.
The data storage, data flow and main processing stage of the SJS are shown in
Figure 4.
4. Experiments and Evaluation
In this section, we measure the impact of cluster scale, partition number, repartition threshold value and dataset characteristics on the performance of SJS. Given the same operating environment, we compare SJS with the three spatial joins designed for MapReduce and Spark, i.e., SJMR on SpatialHadoop (SHADPOOP-SJMR), Distributed Join on SpatialHadoop (SHADOOP-DJ) [
15] and SpatialSpark (SSPARK) [
18]. In addition, we also compare three other in-memory spatial join algorithms for SJS: plane-sweep, quadtree index nested-loop and R-tree index nested-loop. The nested loop spatial join is the theoretical worst case of a join and shows poor performance for large datasets, and thus, we did not consider it.
4.1. Experiment Setup and Datasets
The experiments are performed with Hadoop 2.6.0 and Spark 1.0.2 running on JDK 1.7 on DELL PowerEdge R720 servers, each consisting of an Intel Xeon E5-2630 v2 2.60-GHz processor, 32 GB main memory and 500 GB SAS disk. SUSE Linux Enterprise Server 11 SP2 operating system and ext3 file system are present on each server. In order to compare the performance with that of SpatialHadoop, we deploy SpatialHadoop release Version 2.3 with Hadoop 1.2.1 on the same hardware environment described above.
The datasets used in the experiments are from Topologically-Integrated Geographic Encoding and Referencing (TIGER) and OpenStreet Map, as listed in
Table 1. All of the files can be downloaded from the website of SpatialHadoop [
38].
We deploy the Spark projects on a Hadoop cluster and perform the execution on Hadoop YARN (next generation of MapReduce). In the case of Spark in YARN mode, executor number, executor cores and executor memory refer to the total task progression on all nodes, task threads per executor and maximum main memory allocated in each executor, respectively. All of the parameters should be preset before submitting the Spark job, which are shown in detail in
Table 2.
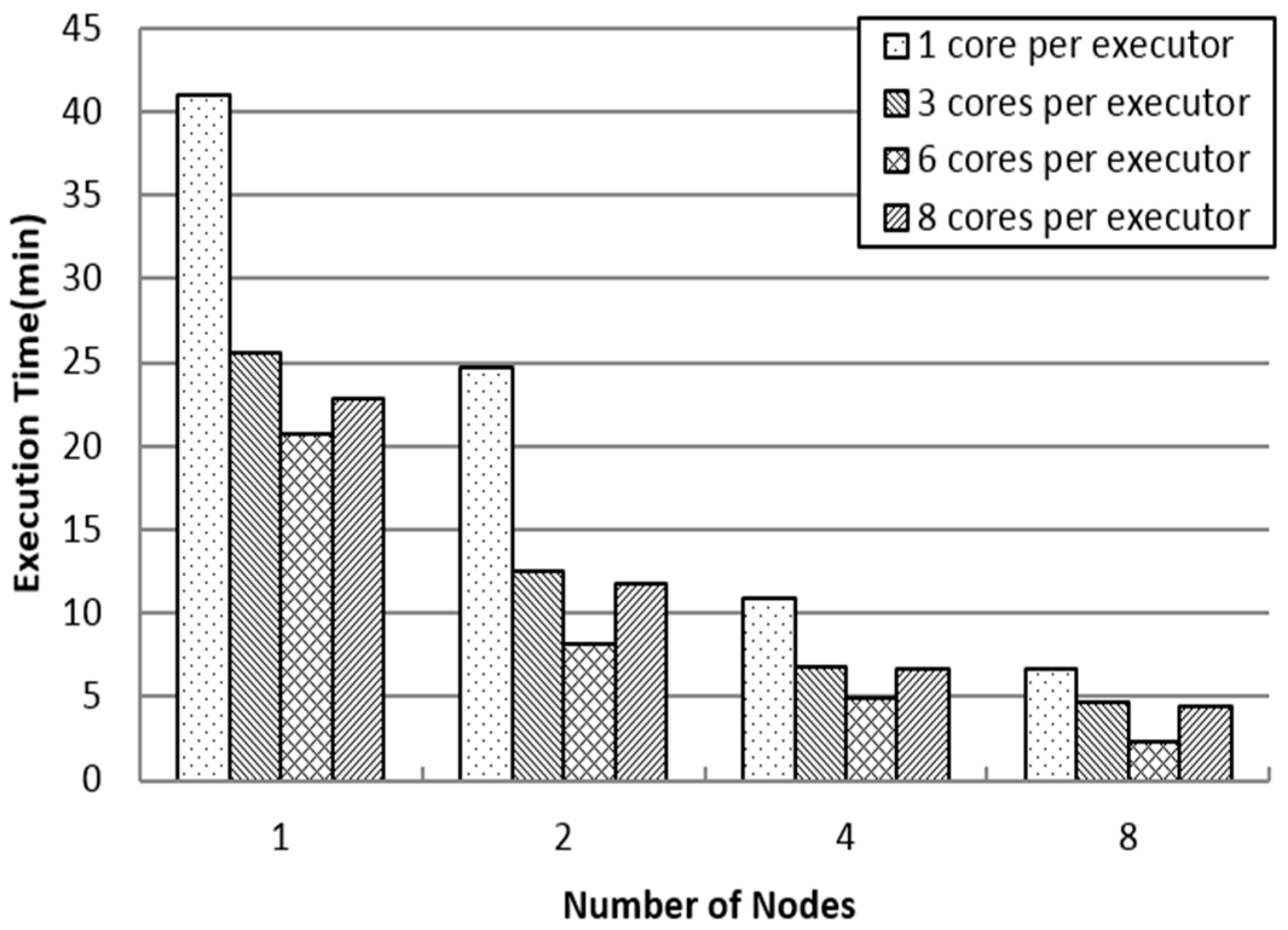
4.2. Impact of Number of Nodes and Executor Cores
Figure 5 shows the impact of the number of nodes and executor cores on SJS performance. There is a direct relationship between SJS performance and the number of nodes. When the number of executors per node is fixed at one, SJS performance improves significantly with an increase in the number of nodes. Thus, in this case, SJS shows high scalability. However, with an increase in the number of cores per executor, the execution time of SJS may not always decrease. For instance, notwithstanding the number of nodes, the execution time for eight cores per executor is significantly greater than that for six cores per executor. Hence, when the number of executors equals the number of nodes (each node runs one executor) and the cores per executor is set to six, which is equal to the CPU cores of each node, SJS performs the best. As the number of cores per executor increases, the number of tasks scheduled on a CPU also increases, thus leading to poor performance.
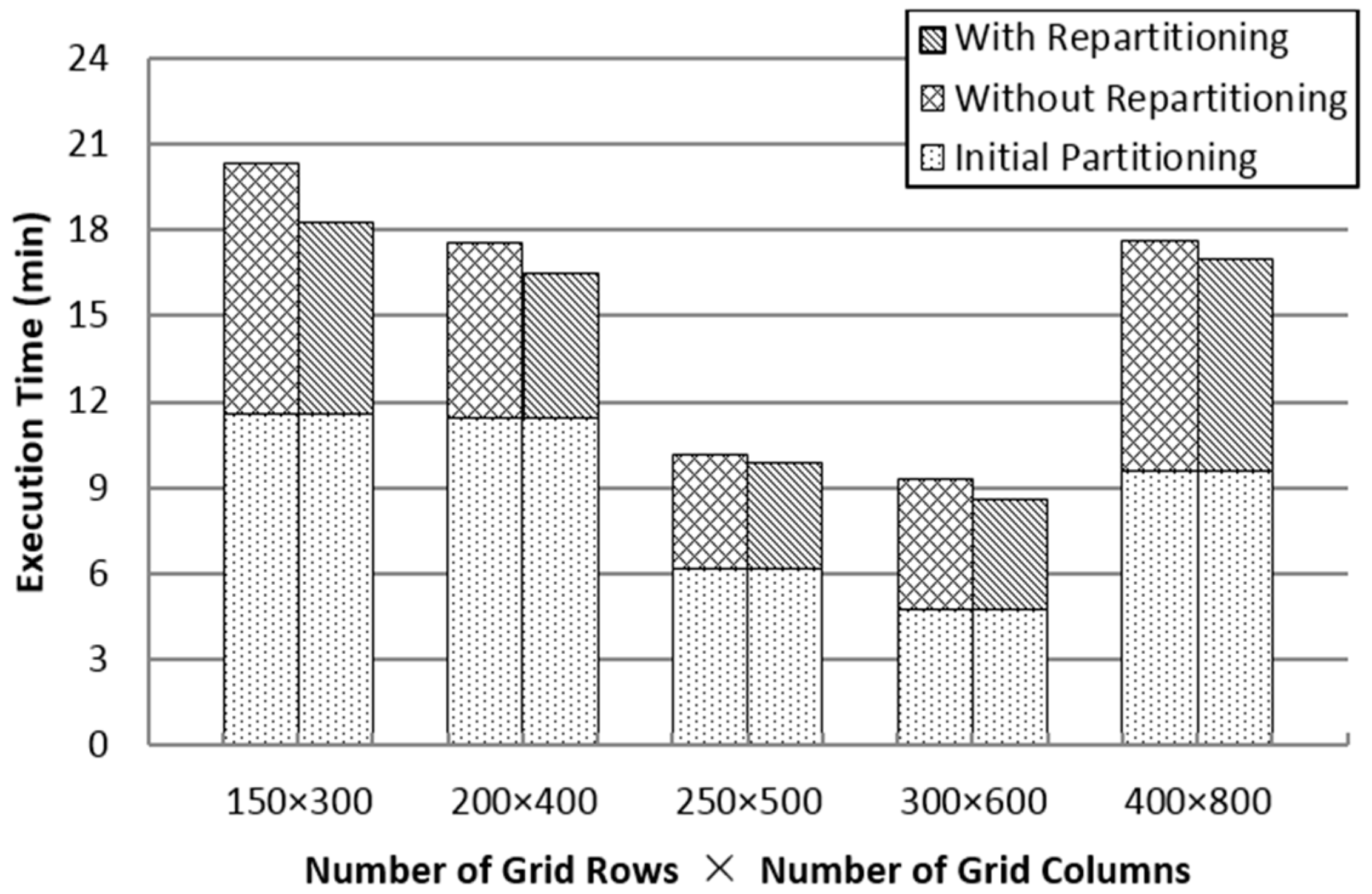
4.3. Impact of Number of Partitions and Repartitioning
As shown in
Figure 6, when the number of partitions is small, there is a large amount of data in each partition, which can trigger memory overflow or larger computation time. Furthermore, as the number of partitions increases, an excessive number of duplicates can lead to unnecessary calculation. Repartitioning can refine the data size and limit the processing time of each partition to support the in-memory spatial join in a better manner. Notwithstanding the number of partitions, SJS with repartitioning can reduce total execution time by 5%–25%, without considering the initial partitioning.
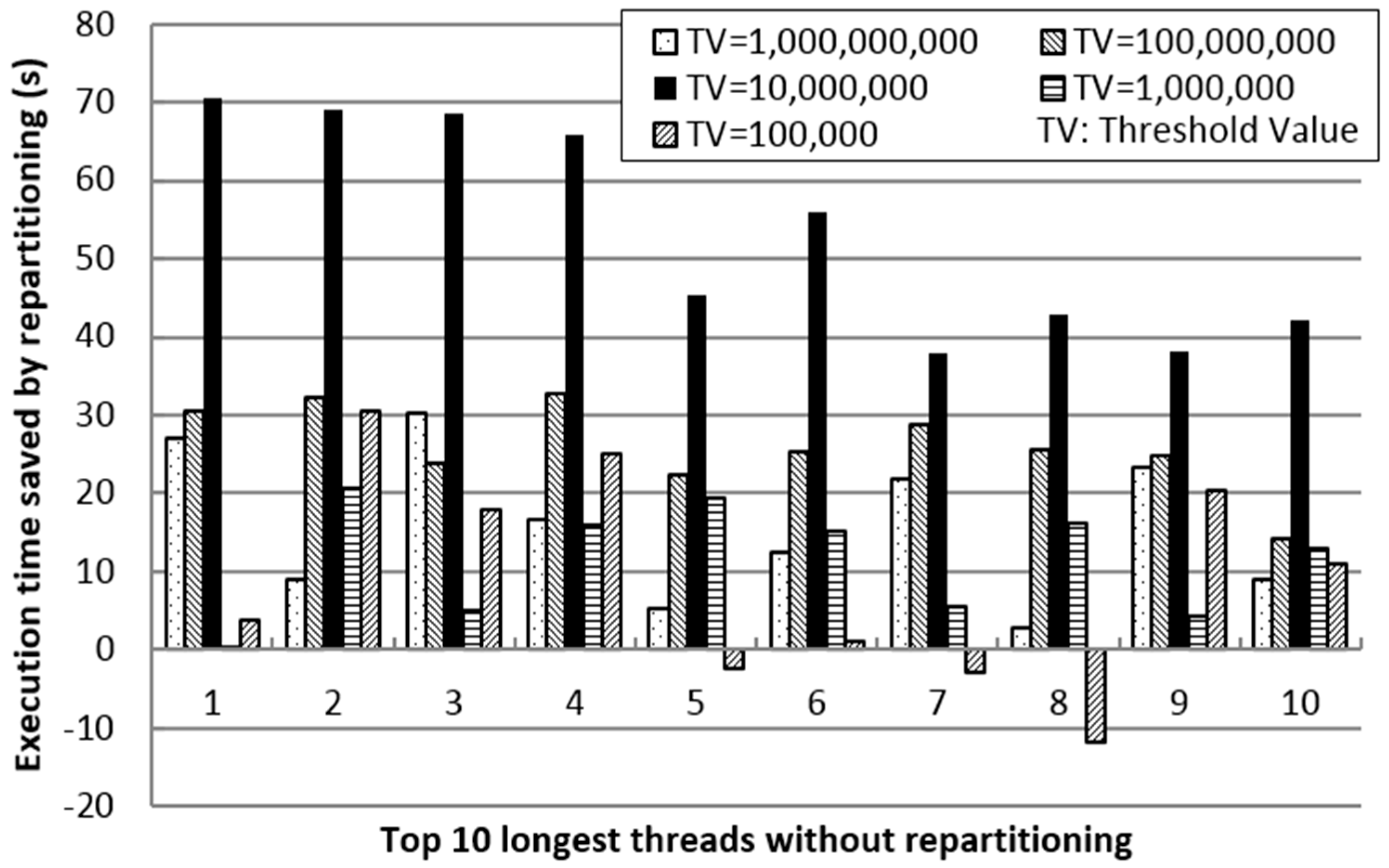
Figure 7 shows the impact of the threshold value in repartitioning on saved execution time. The negative value means the time is wasted by repartitioning; negative contributes to improve the performance. First, we sort the execution time of the processing threads (each partition is processed in one thread) of SJS without repartitioning in every node to obtain a list of the top 10 longest threads. Then, we vary TV from 100,000–1,000,000,000 in order to compare the time saved by repartitioning for each corresponding thread. From the results, we can observe that when TV is 10,000,000, significant time is saved by repartitioning. Thus, as TV decreases, the number of duplicates increases. However, as TV increases, partition refinement decreases. Hence, by efficiently reducing the execution time of the longest threads of SJS without repartitioning, in-memory repartitioning improves the performance of SJS significantly.
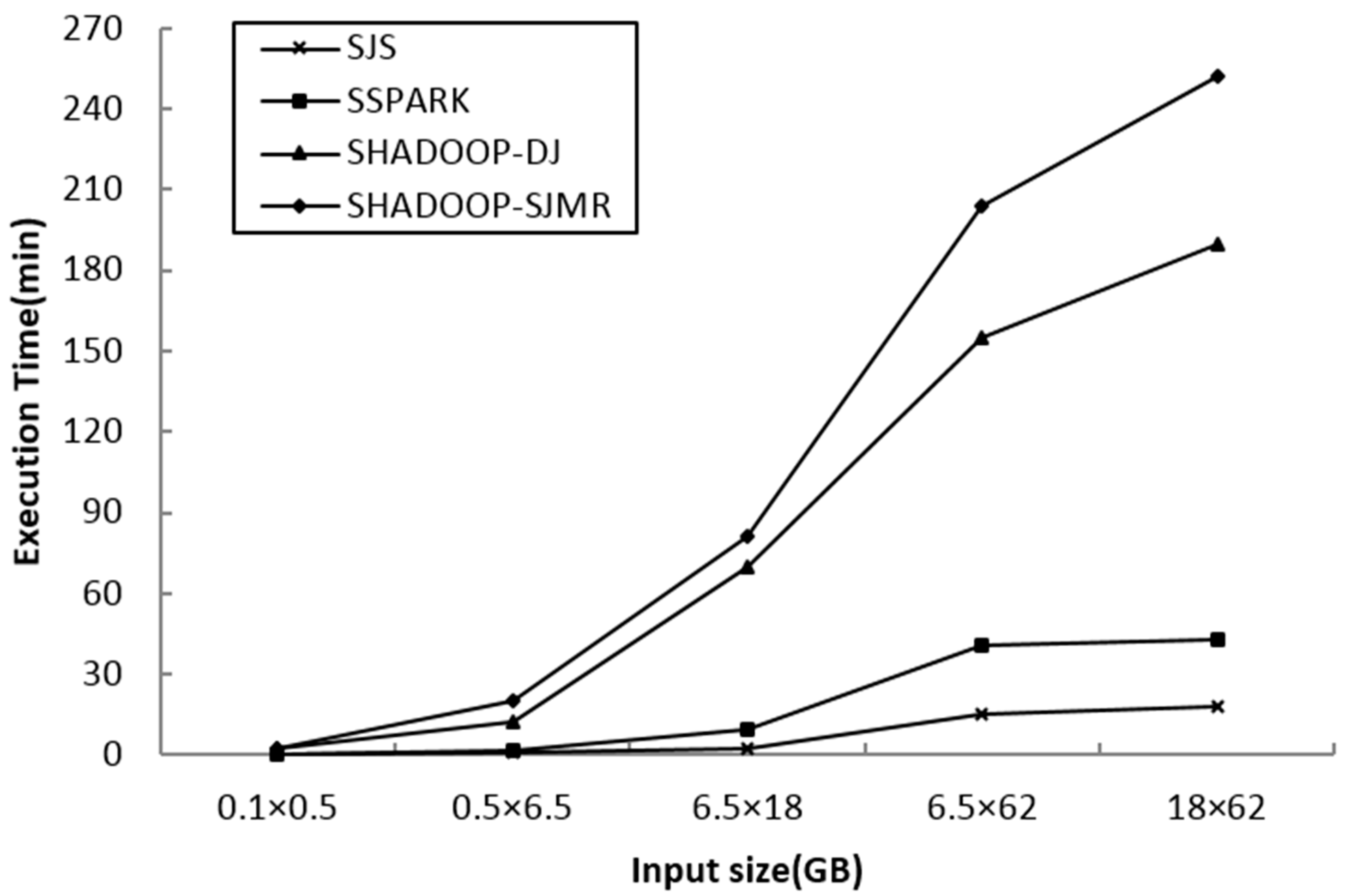
4.4. Comparison between SHADOOP-SJMR, SHADOOP-DJ, SSPARK and SJS
In order to compare the performance of other spatial join algorithms designed for MapReduce or Spark, such as SHADOOP-SJMR, SHADOOP-DJ and SSPARK, we performed a comparison test using the various dataset sizes that are listed in
Section 4.1 as input. For the algorithms that run on SpatialHadoop, we measure the execution time including the preprocessing time (such as the index creation time). All of the tests are executed on the same cluster with a suitable software framework.
We vary the input dataset size from 0.1 GB × 0.5 GB to 18 GB × 62 GB. From
Figure 8, it is observed that SJS’s performance is significantly better than that of the other algorithms. The results prove that SJS can manage massive spatial datasets and also deliver the best performance among the parallel spatial join algorithms.
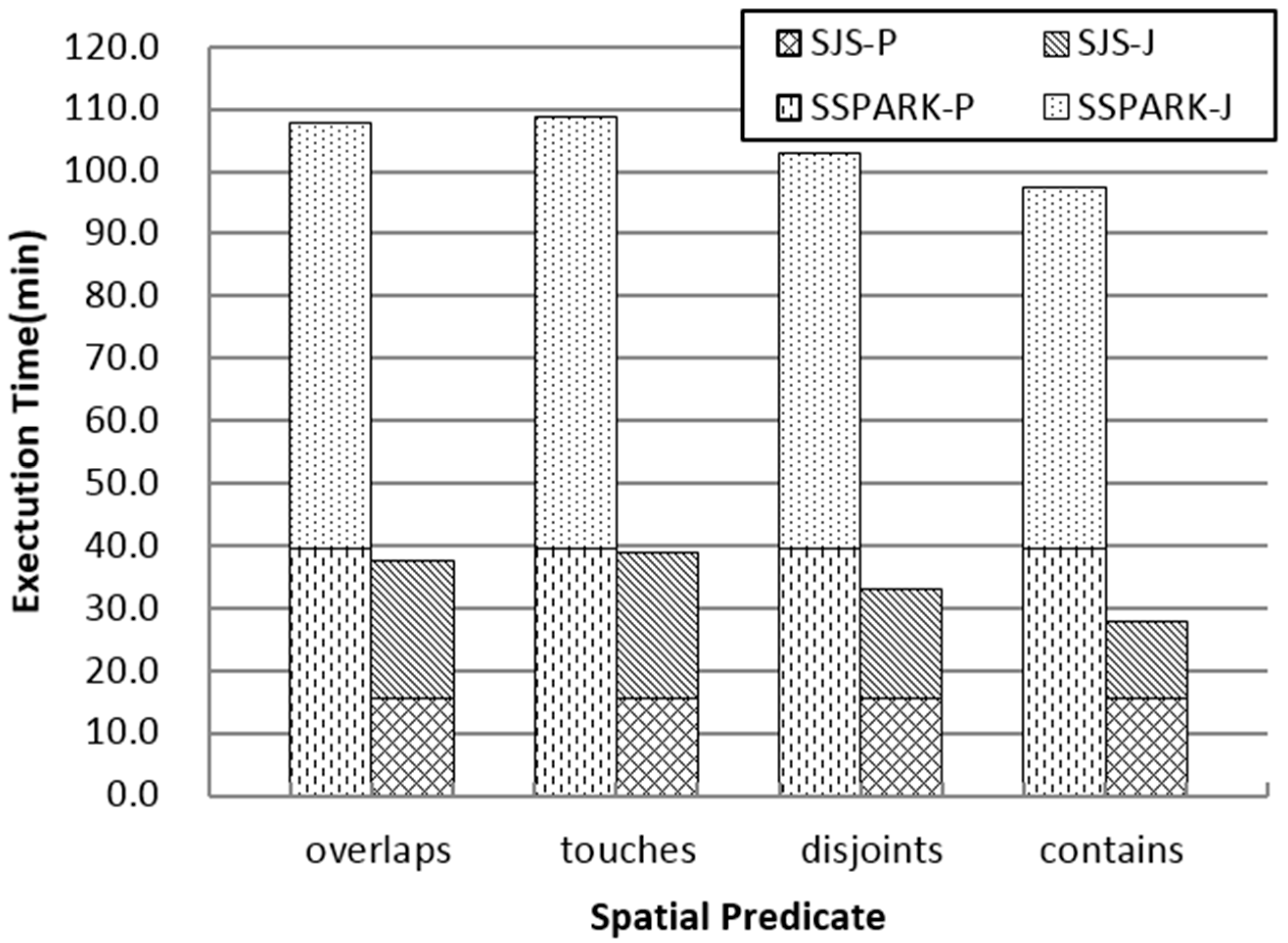
Both Hadoop-GIS and SpatialHadoop are Hadoop-based and write their intermediate results to disk, and thus, we make a detailed comparison with SpatialSpark. Given that SpatialSpark uses Java Topology Suite (JTS) as the topological analysis library, we performed the comparison test using various spatial predicates, such as overlaps, touches, disjoints and contains. In the case of SpatialSpark, we use the sort tile partition method, set the sample ratio at 0.01, and the others are same as SJS.
Since transformations in Spark only execute when an action occurs, the actions in SJS are only “groupBy” in the partition phase and “saveAsTextFile” (“distinct” in SSPARK) in the last. Thus, we separate both SJS and SSPARK mainly in two phases, one is the partition phase; the other is the partition join and local join phase (including the repartition phase in SJS).
As shown in
Figure 9, because SJS uses grid partition, which is more efficient than SATO in SSPARK, the execution time in the partition and partition join phase of SJS is significantly reduced. Given that (1) the repartition phase in SJS limits the processing time of each partition, which is suitable for the task schedule strategy of Spark; (2) the duplicates are avoided before refinement; and (3) the R*-tree local join algorithm in SJS outperforms R-tree nested-loop join in SpatialSpark, SJS performs better than SpatialSpark.
Figure 9 also shows that both SpatialSpark and SJS support various topological analyses on large spatial datasets, and different spatial predicates obviously affect the final performance.
4.5. Performance Comparison between Various in-Memory Spatial Join Algorithms for SJS
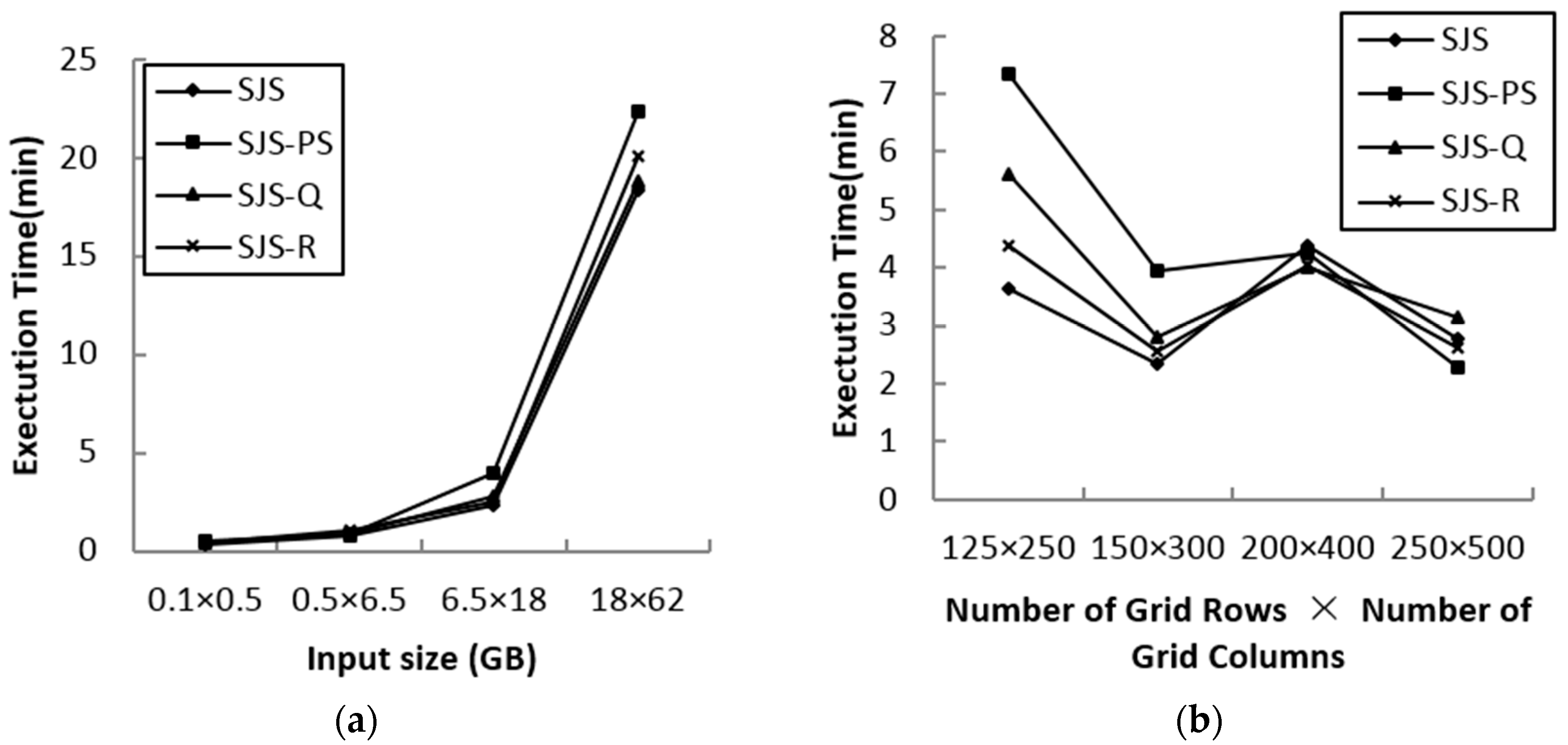
In order to test the performance of various in-memory join algorithms used in the SJS in-memory join phase, Plane-Sweep (SJS-PS), Quadtree index nested-loop join (SJS-Q) and R-tree index nested-loop join (SJS-R) are compared.
Figure 10a shows the performance comparison results for various input data sizes.
Figure 10b shows the performance comparison results for various grid sizes using linearwater (LW) and areawater (AW) as the input datasets.
We can observe that the default R*-tree index nested-loop join has the best performance for all input and grid sizes in most cases. The size of each partition is suitable for every in-memory spatial join method after repartitioning refinement; thus, although the data scale is large, the performance difference between the methods is smaller than the approaches in [
23].
5. Conclusions and Future Work
Recent advances in geocomputation techniques greatly enhance the abilities of spatial and sustainability scientists to conduct large-scale data analysis. Such large-scale data analytics will stimulate the development of new computational models. In turn, these newly-developed methods get adopted in real-world practice, forming a positive feedback loop [
39]. Rigorous spatial analysis and modeling of socioeconomic and environmental dynamics opens up a rich empirical context for scientific research and policy interventions [
40]. A robust spatial join can serve as a fundamental analytical power to understand how everything is related and to what extent, such as how a firm’s location is related to a specific site in a large national dataset [
41] or disaster risk related to multiple spatially-related factors [
42,
43]. In this study, we proposed and described SJS, a high-performance spatial join algorithm with Spark. SJS can be deployed easily on large-scale cloud clusters, and it significantly improves the performance of spatial join on massive spatial datasets. This research proves that the availability of large-size geo-referenced datasets along with the high-performance computing technology can raise great opportunities for sustainability research on whether and how these new trends in data and technology can be utilized to help detect the associated trends and patterns in the human-environment dynamics. In other words, such computing power allows for the measuring and monitoring of sustainability in a very large datasets and can respond within a very short time period. The iterative computation characteristics of Spark make it possible to perform in-memory parallel spatial join with minimal disk access. In particular, the calculation-evaluating-based in-memory repartition technology evaluates the CPU cost of each partition, thus differing from the repartitioning method that considers only the memory or a single dataset; hence, the result is more suitable for in-memory spatial join in Spark. The reference point method that we implemented in Spark was adopted in order to avoid duplicates instead of the built-in distinct transformation, which eliminates repetitive calculations. Benefitting from the high space utilization and retrieval speed of R*-tree, each partition executes a high-performance index nested-loop spatial join in parallel. Based on extensive evaluation of real datasets, we demonstrate that SJS performs significantly better than earlier Hadoop-like spatial join approaches.
The coupling relationship between multiple driving forces in the spatial context has been heatedly debated in a variety of environmental studies [
44]. This pilot study demonstrated the promising feature of high-performance computing on the solution of large-scale spatial join to explore geographical relationships. In future work, we will improve the accuracy of the calculation evaluating model and apply recent in-memory spatial join methods, such as TOUCH, to Spark in order to maximize local join performance. In addition, the temporal dimension will also be added to investigate spatiotemporal join, and high-dimensional geographic objects will also be explored. It warrants noticing that an efficient 2D spatial index, such as R*-tree, will no longer be suitable in the high dimensional space.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}