
A Study on the Estimation Method of Risk Based Area for Jetty Safety Monitoring

 ,
,
Abstract
:1. Introduction

2. Related Works
3. Method for the Calculation of the Risk Based Area
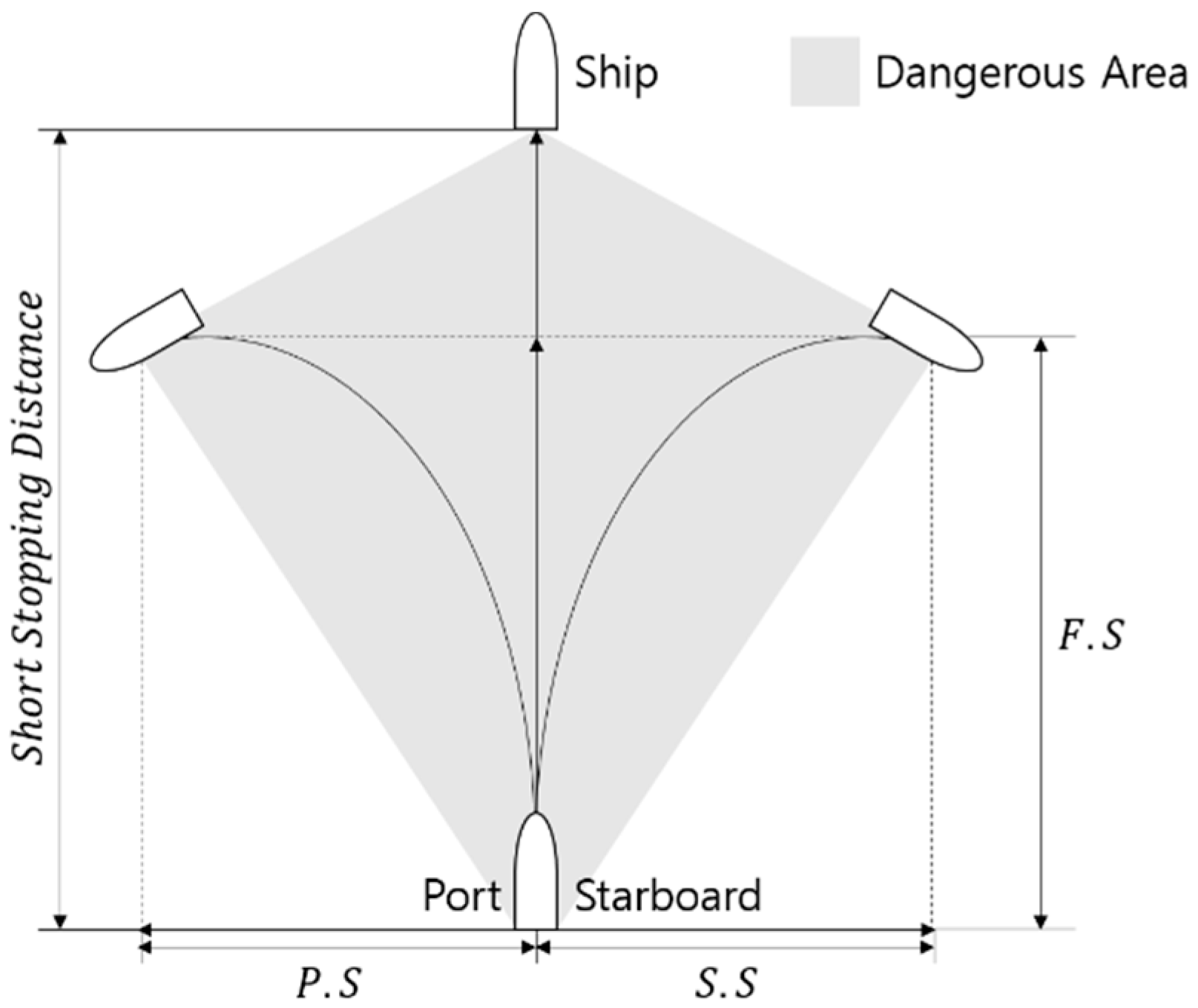
3.1. Calculation of the Risk Based Area of a Ship
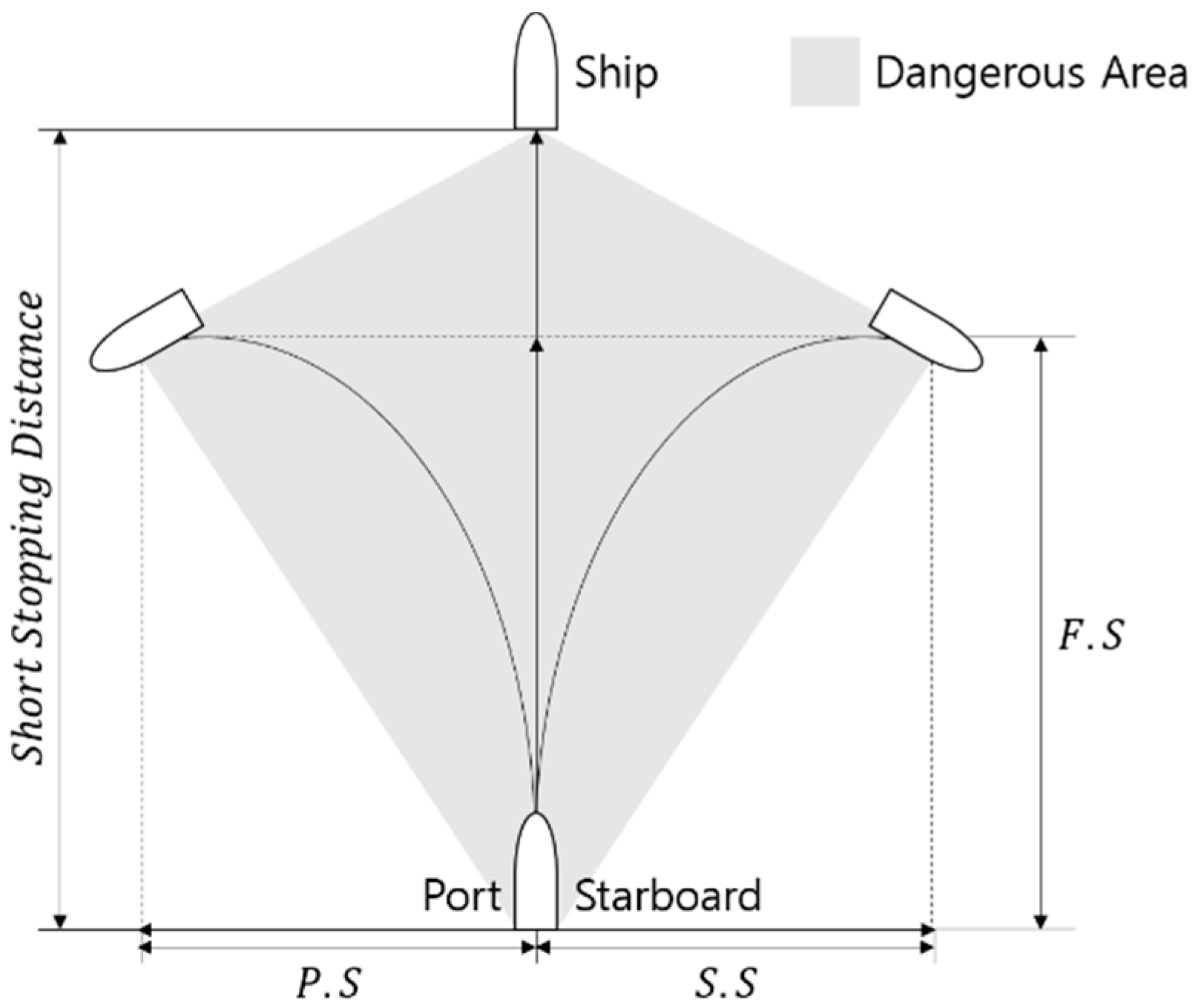
3.1.1. Shortest Stopping Distance of a Ship
- Astern engine power: The stopping distance is inversely proportional to the magnitude of the astern power.
- Propeller type: The time required to go astern is shorter for ships with controllable pitch propellers than for those with fixed pitch propellers.
- Displacement: The time required to go astern is proportional to the displacement.
- Velocity: The stopping distance is proportional to the velocity before the engines go astern.
- Wind, hull form, ocean and tidal currents, etc.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship length (m) | Shortest Stopping Distance of Ship |
|---|---|
| 210 | 10 times the length |
| 250 | 13 times the length |
| 300 | 15 times the length |
3.1.2. Turning Stopping Distance of a Ship
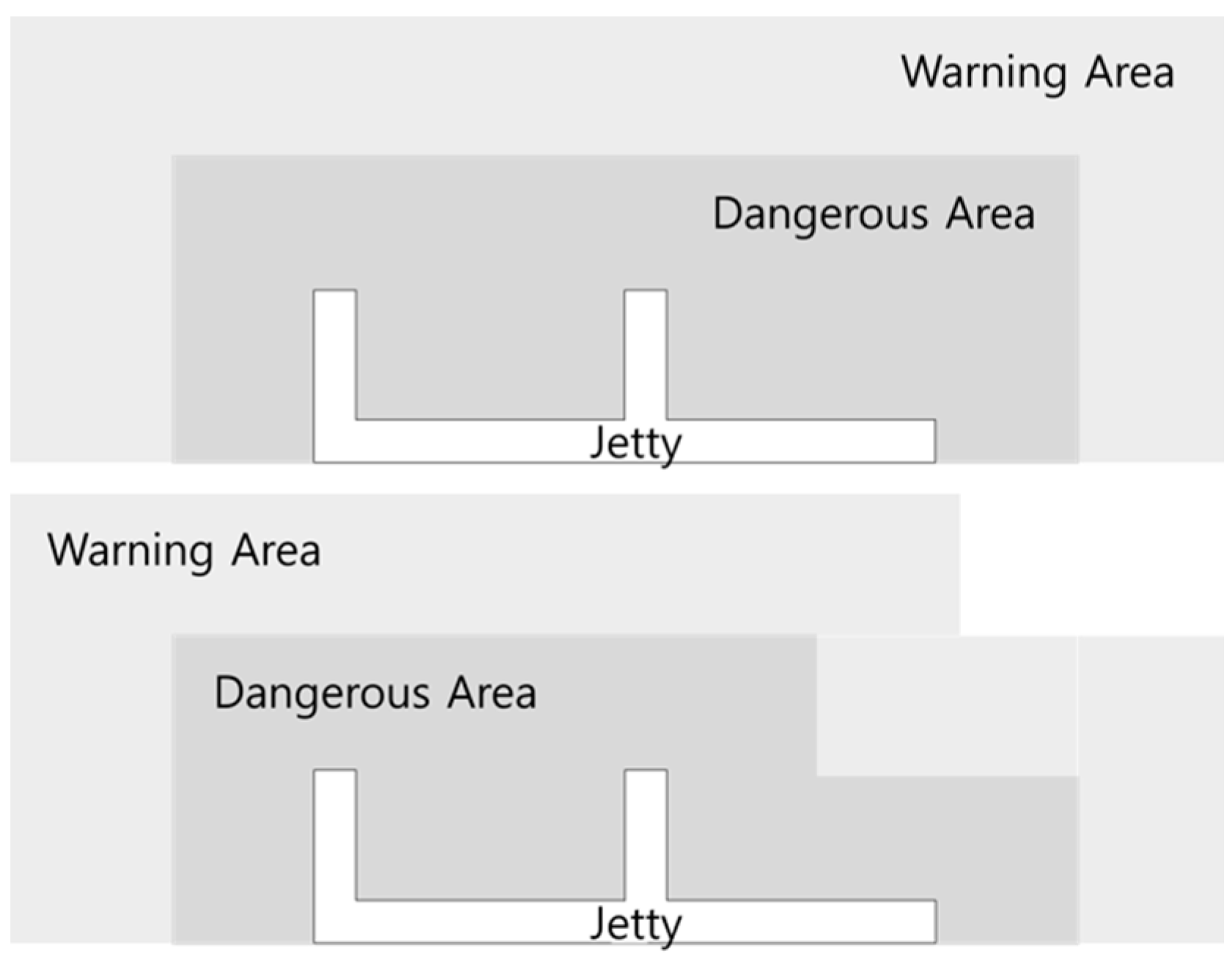
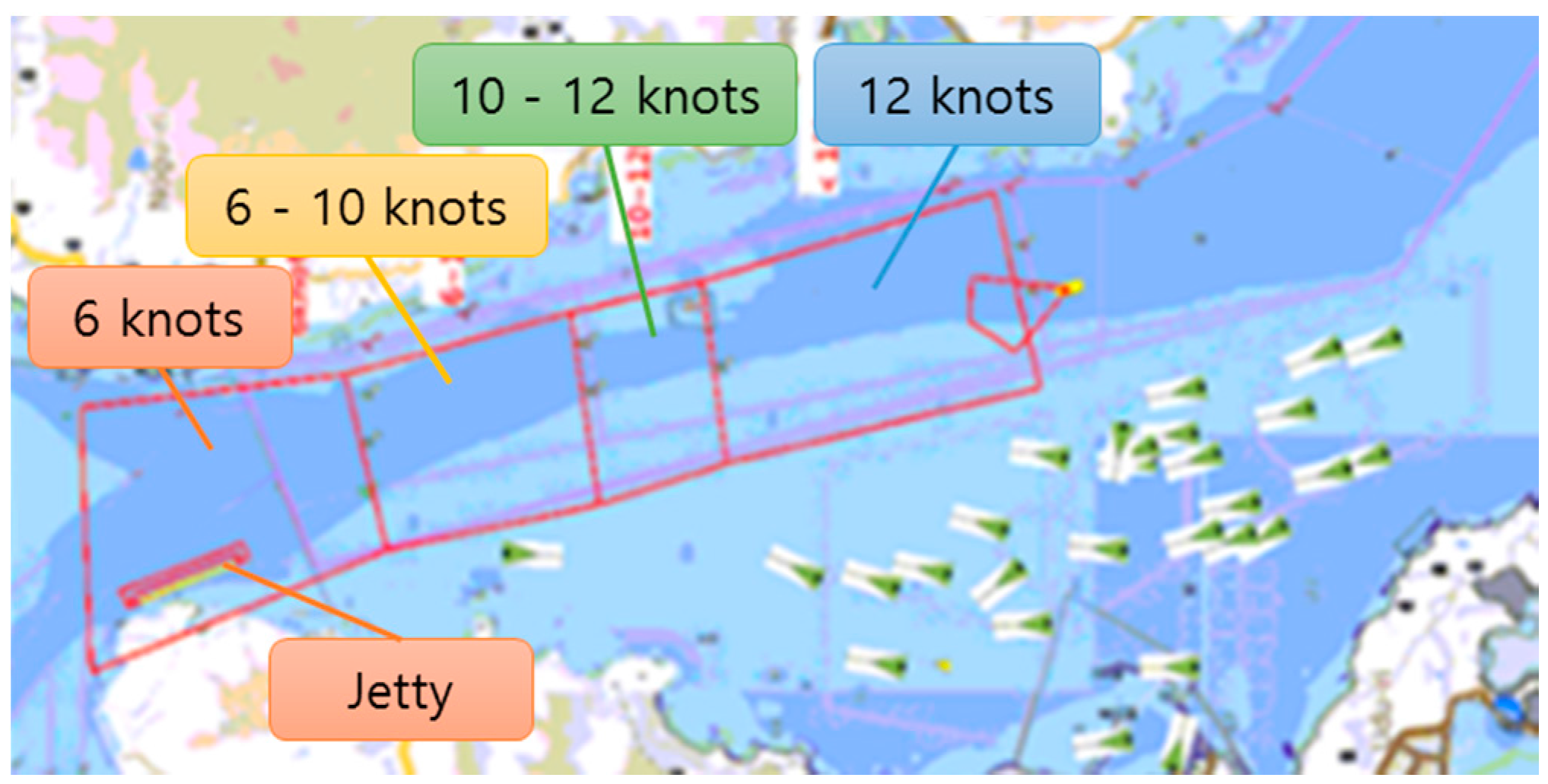
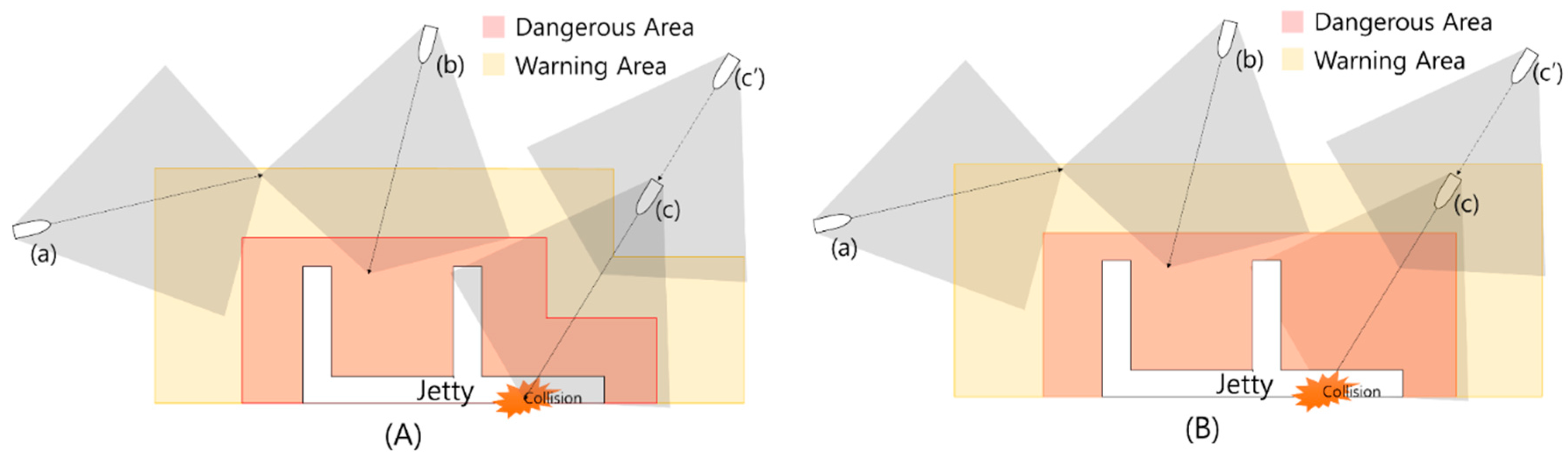
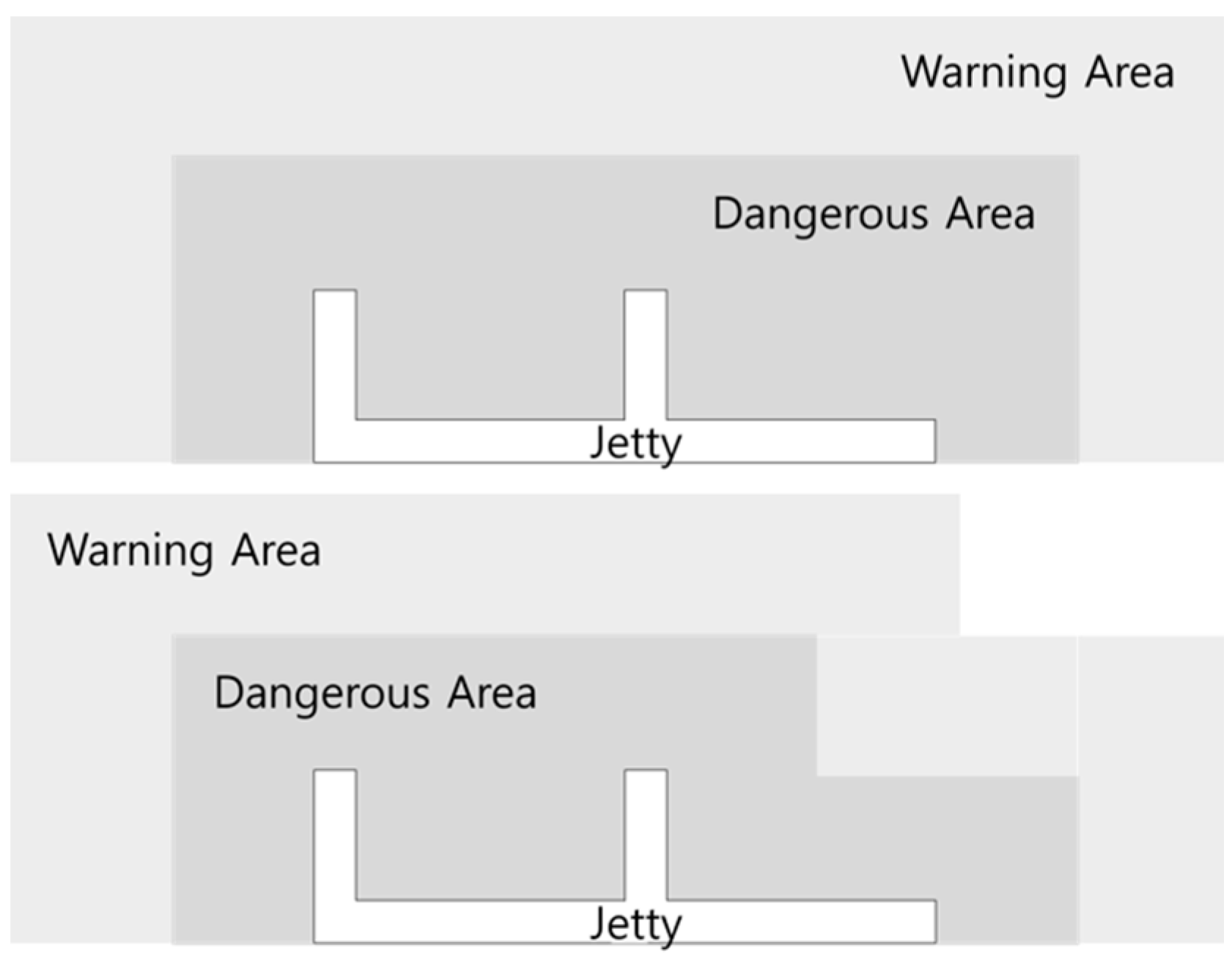
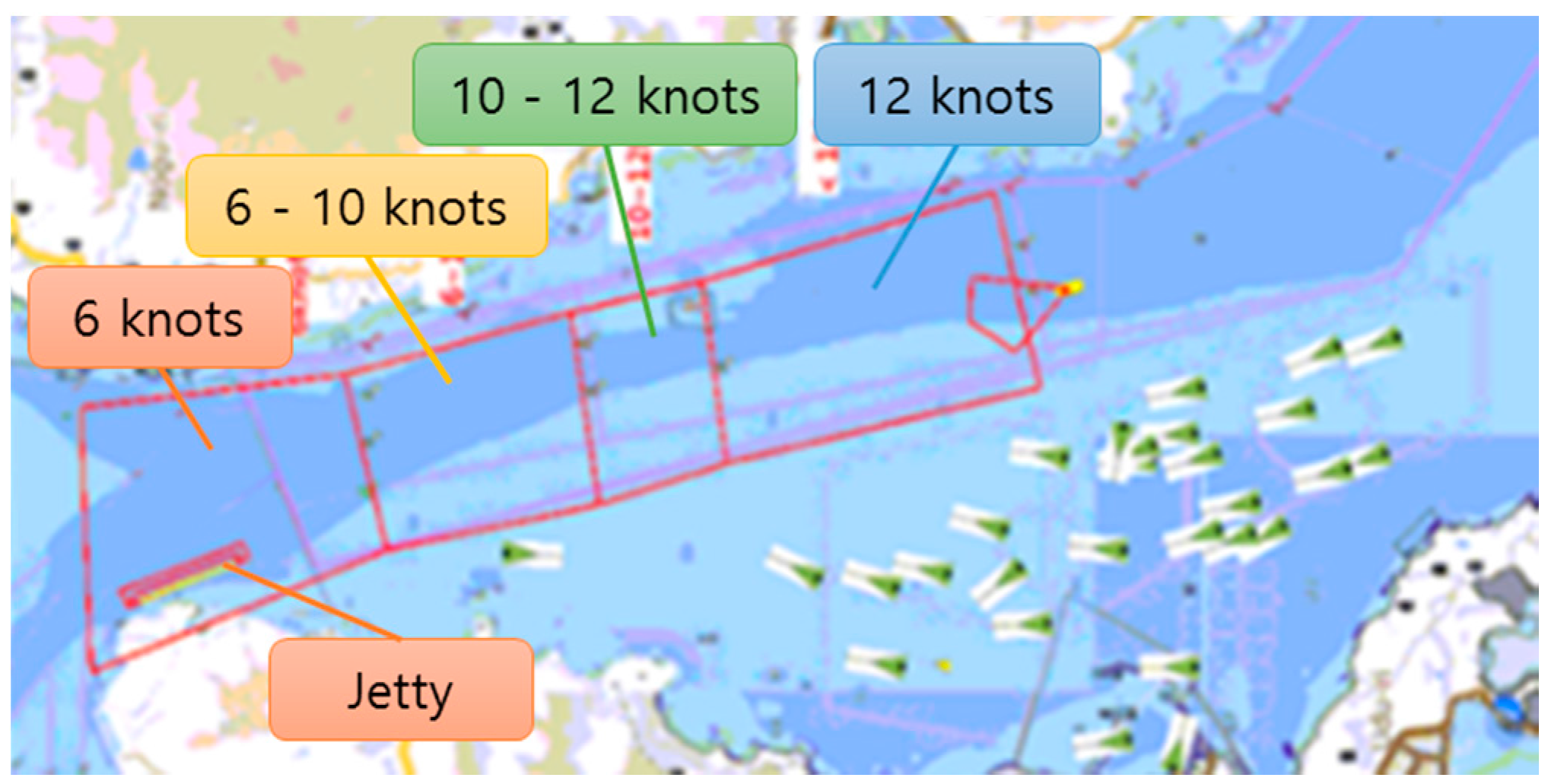
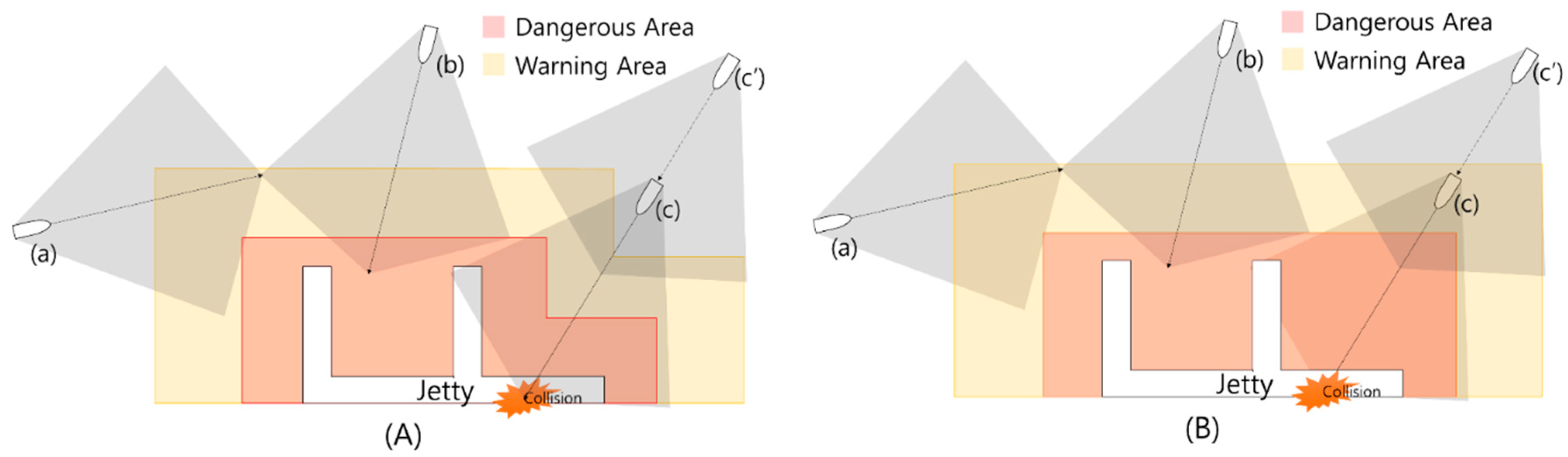
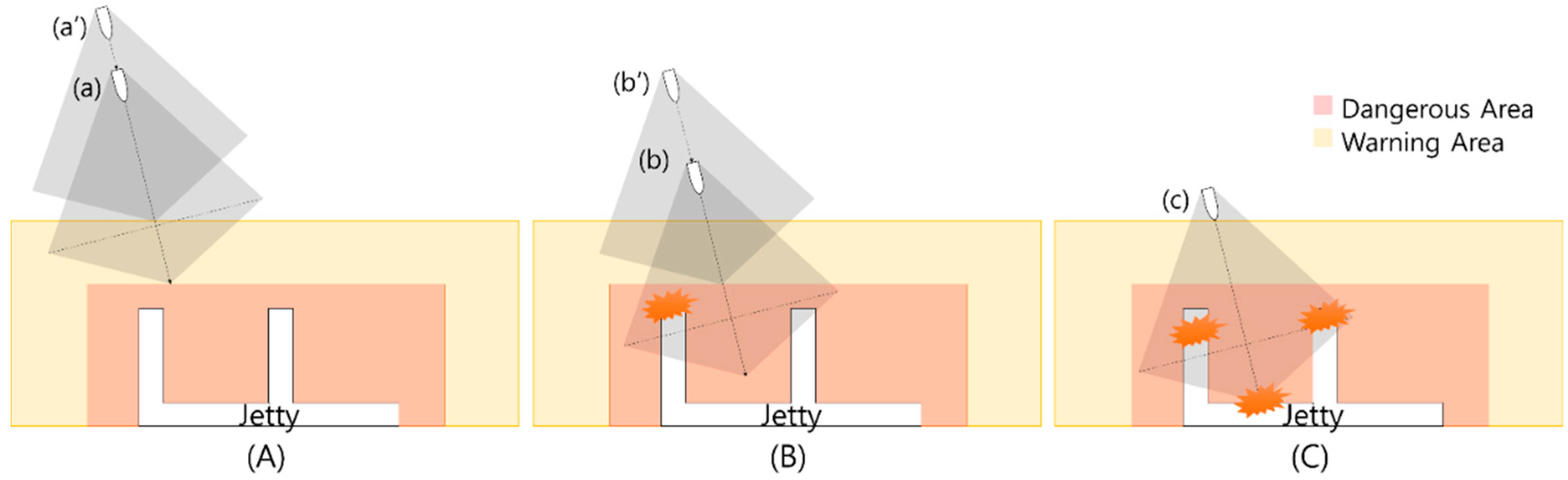
3.2. Calculation of the Risk Based Area of a Jetty
| Distance | Deadweight Tonnage (DWT) | ||
|---|---|---|---|
| Below 10,000 DWT | Panamax, Cape | VLOC, ULOC | |
| Within 1–2 L | 2–3 knots | 2–3 knots | 2–3 knots |
| 1 mile | 7–8 knots | 5–6 knots | 4–5 knots |
| 2 miles | 13 knots | 9 knots | 7 knots |
| 3 miles | Engine S/B | 12 knots | 9 knots |
| 4 miles | Usual service condition | Engine S/B | 11 knots |
| 5 miles | - | Usual service condition | Engine S/B |
| notes | Approaching velocity 2–3 knots + 4 knots/mile | Approaching velocity 2–3 knots + 3 knots/mile | Approaching velocity 2–3 knots + 2 knots/mile |
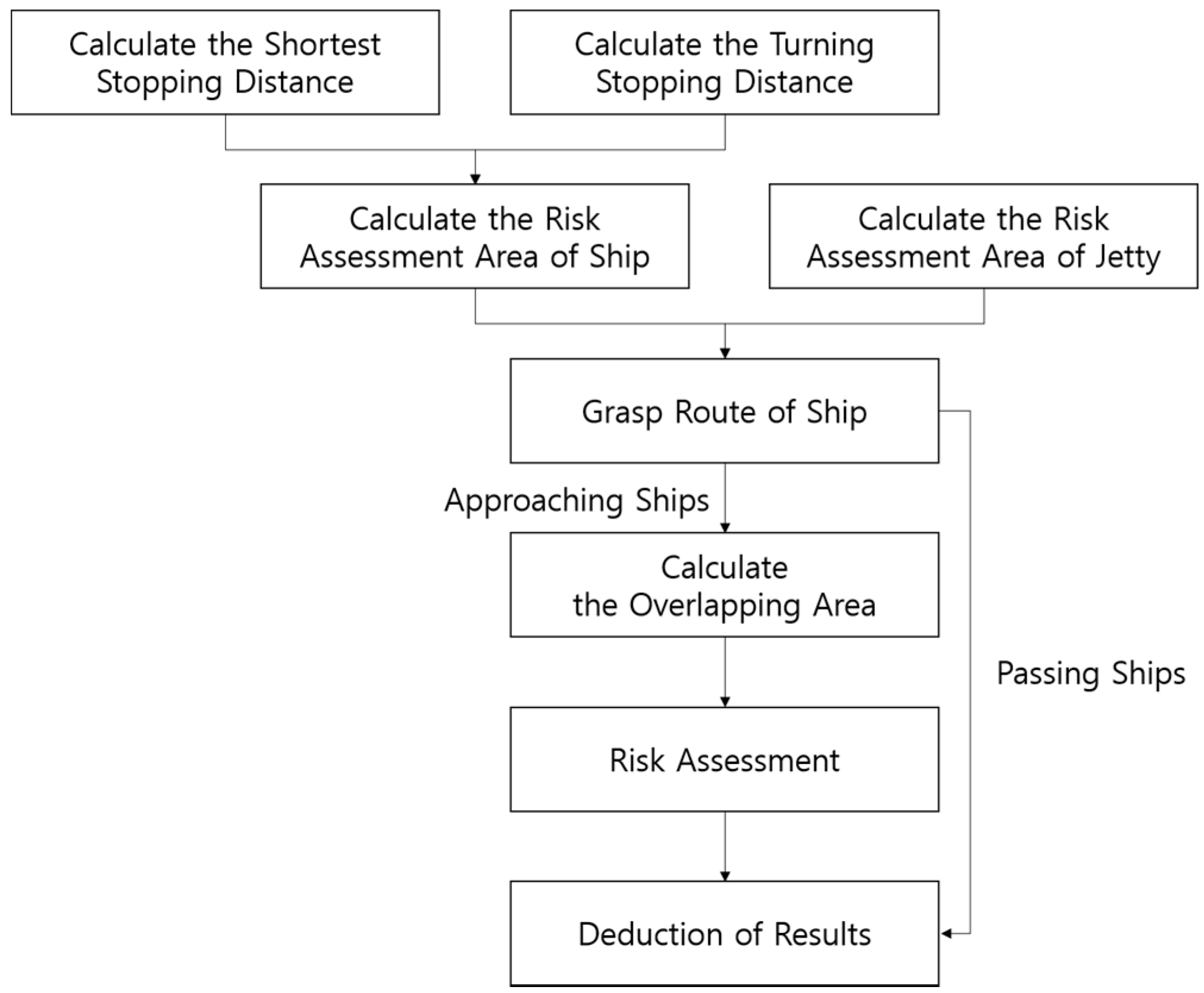
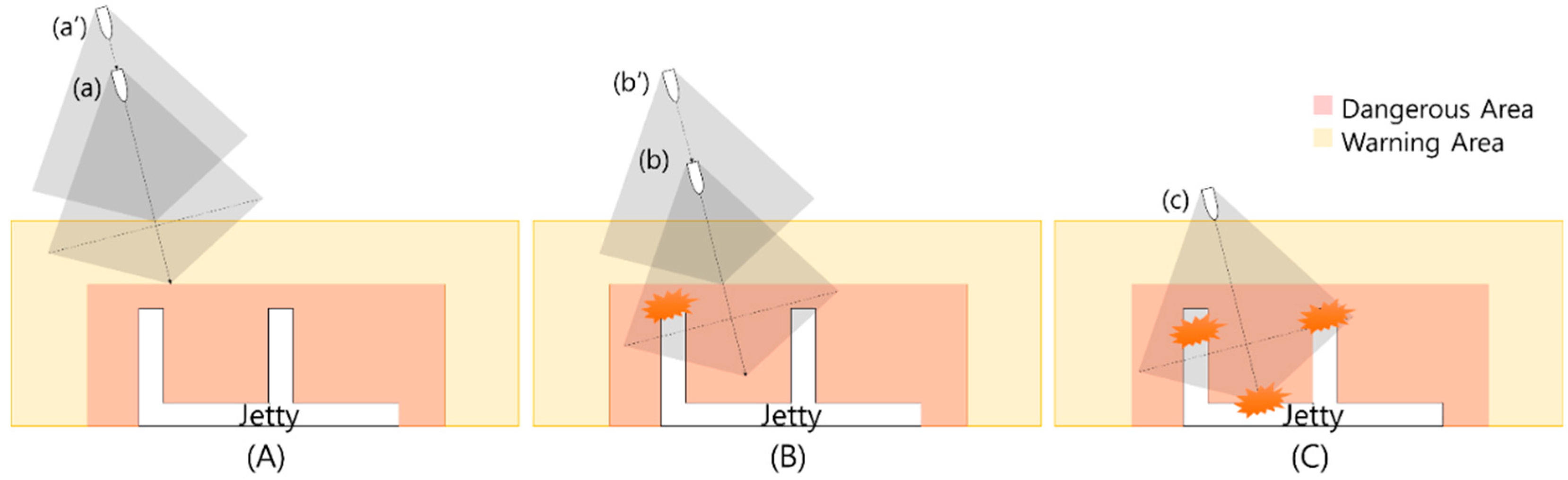
4. Risk Calculation Process

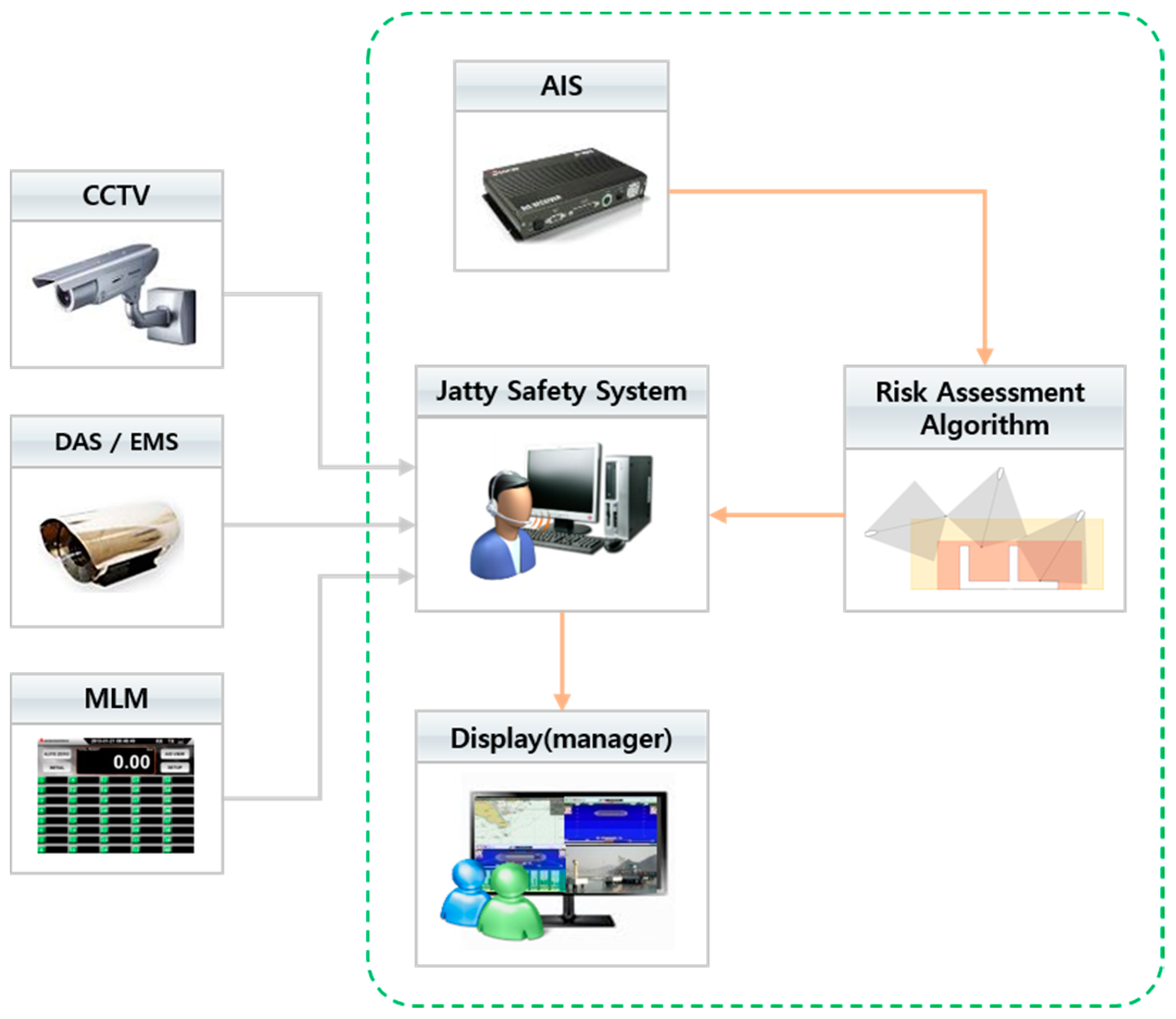
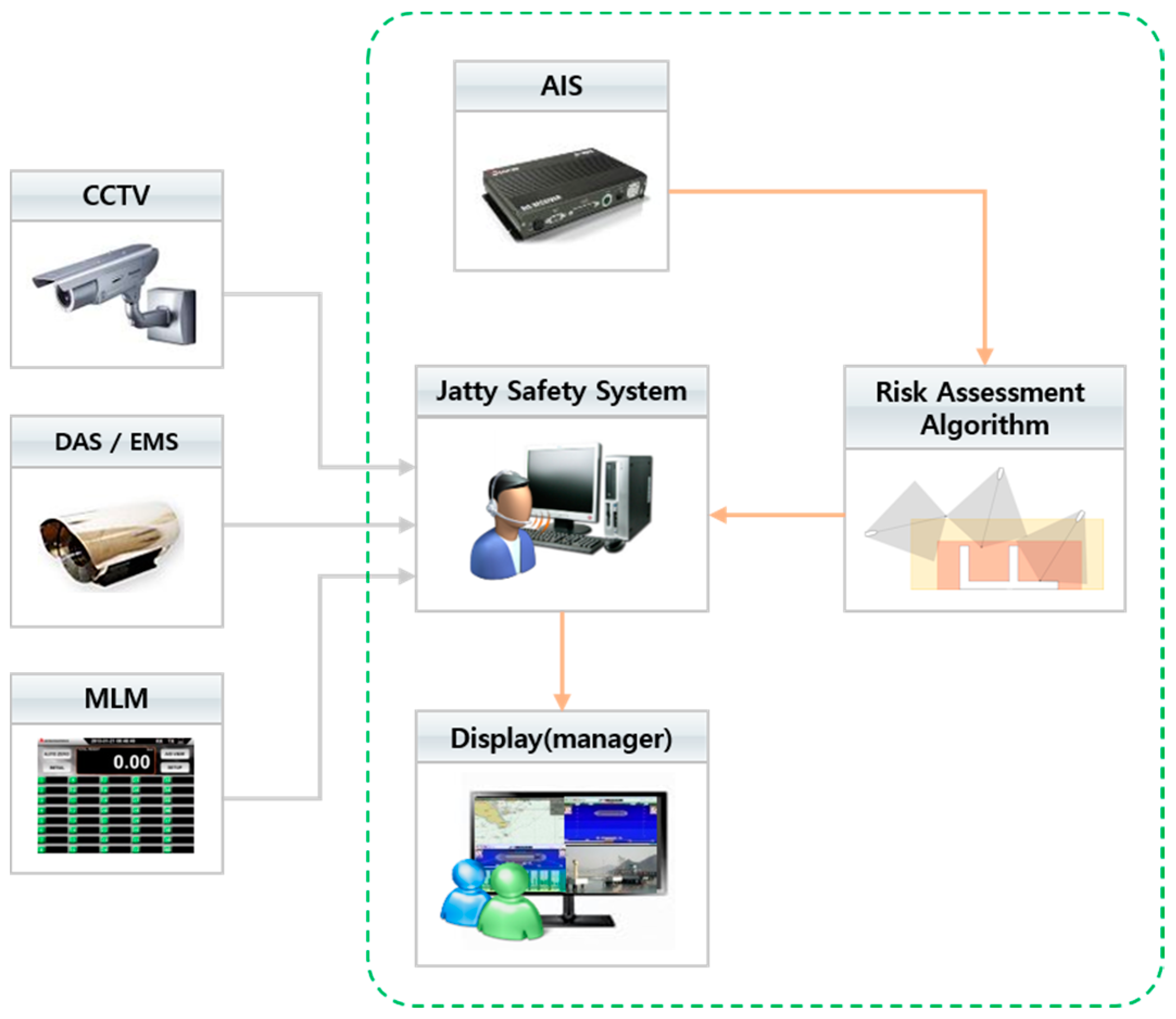
5. Configuration of the Safety-Monitoring System for a Jetty
| Division | Contents of Information |
|---|---|
| Static information | Name of ship, IMO registration number, call sign, kind of ship, ship specification (length, depth, width, etc.), location of antenna |
| Dynamic information | Ship location, course over the ground (COG), velocity, heading of ship, navigation state, rate of turn, angle of inclination |
| Navigation information | Ship draft, hazardous cargo, destination, estimated time of arrival, route planning |
| Notification letters | Important sailing or weather alerts |
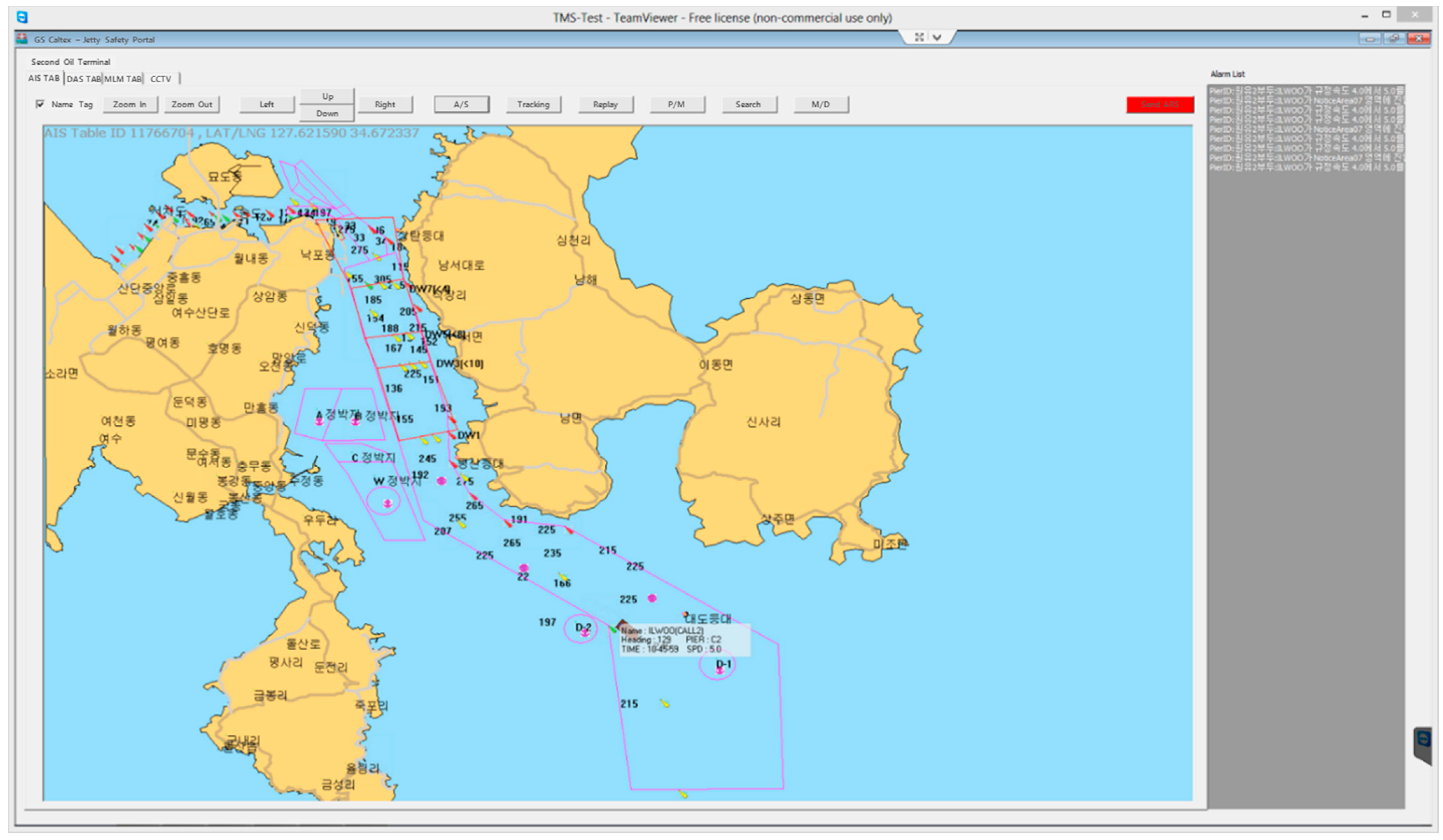
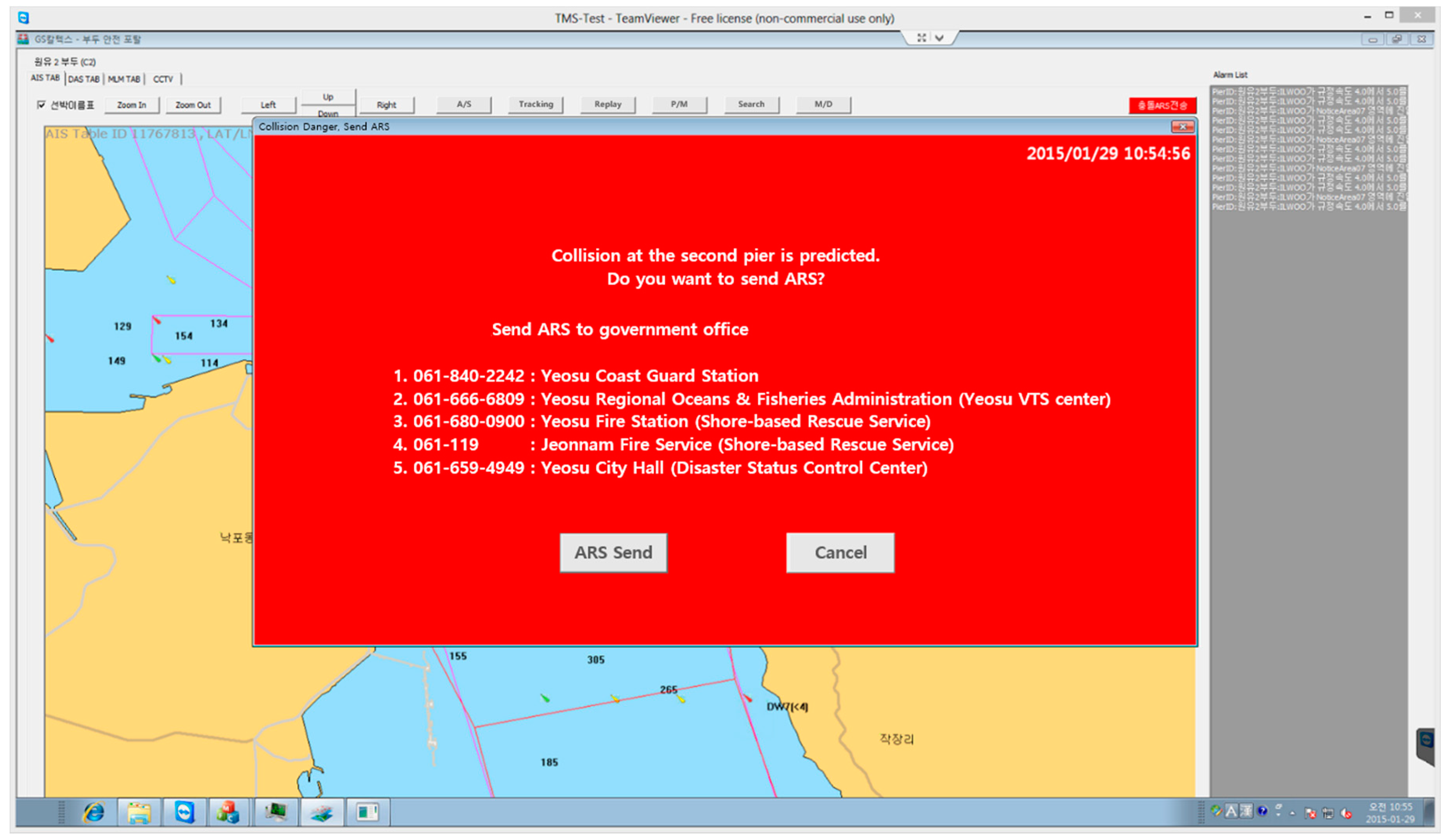
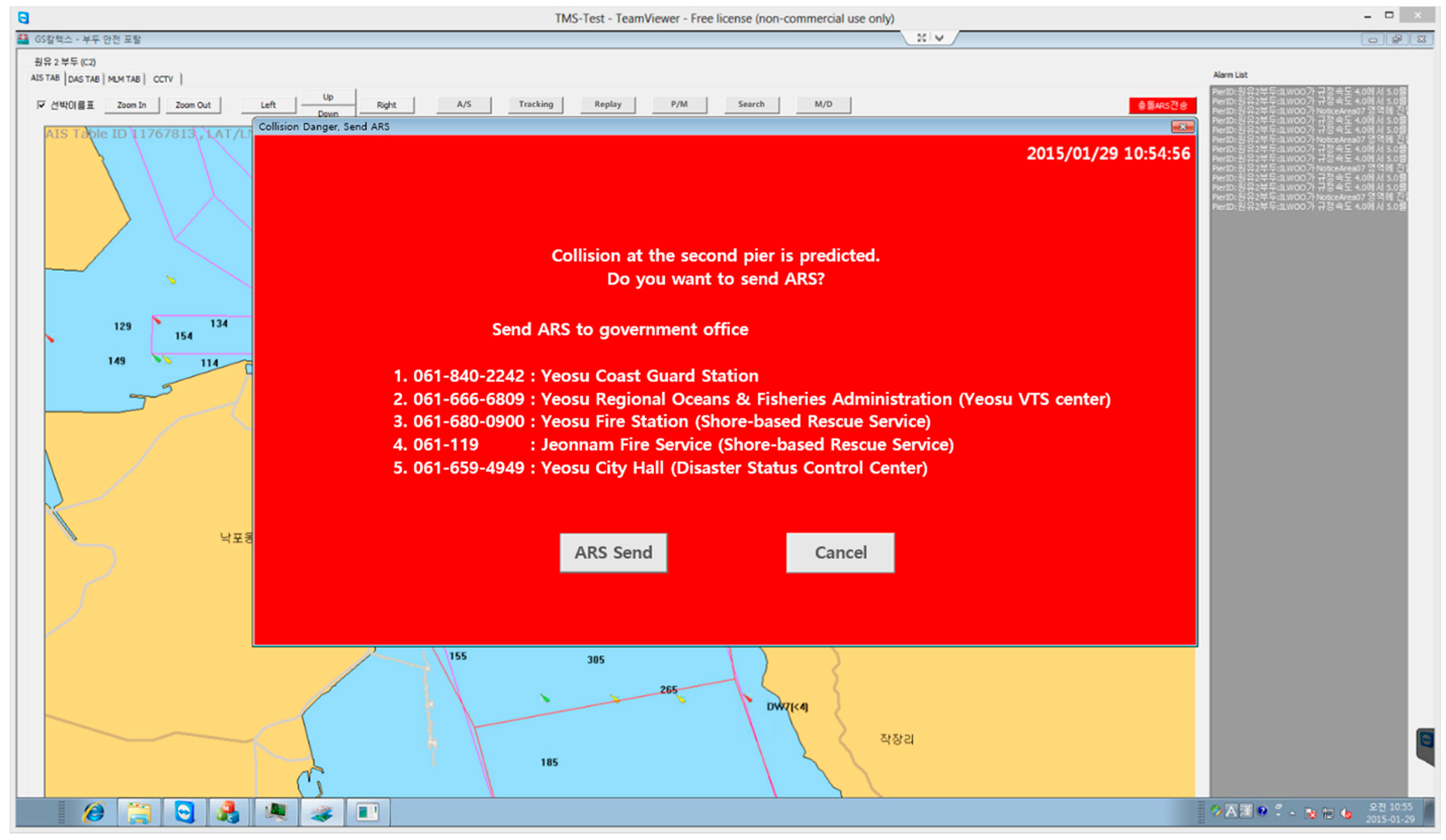
6. Realization of the Safety-Monitoring System for a Jetty


7. Test and Verification
8. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Korea Maritime Institute Editorial department. Shipping Statistics Handbook 2010; Korea Maritime Institute: Busan, Korea, 2010; pp. 357–367.
- Cho, D.O. A study on port safety management between Korea and Japan. Ocean Policy Res. 2003, 18, 97–122. [Google Scholar]
- Anderson, D.E.; Oberman, F.R.; Malone, T.B.; Baker, C.C. Influence of Human Engineering on Manning Levels and Human Performance. Navig. Eng. J. 1997, 109, 67–76. [Google Scholar] [CrossRef]
- Perera, L.P.; Carvalho, J.P.; Soares, C.G. Autonomous guidance and navigation based on the COLREGs rules and regulations of collision avoidance. In Proceedings of the International Workshop on Advanced Ship Design for Pollution Prevention, Split, Croatia, 23–24 November 2009.
- Lenart, A.S. Manoeuvring to required approach parameters—CPA distance and time. Annu. Navig. 1999, 1, 99–108. [Google Scholar]
- Ren, Y.; Mou, J.; Yan, Q.; Zhang, F. Study on Assessing Dynamic Risk of Ship Collision. In Proceedings of the Study on Assessing Dynamic Risk of Ship Collision (ICTIS 2011), Wuhan, China, 30 June–2 July 2011.
- Bukhari, A.C.; Tusseyeva, I.; Lee, B.G.; Kim, Y.G. An intelligent real-time multi-vessel collision risk assessment system from VTS view point based on fuzzy inference system. Expert Syst. Appl. 2013, 40, 1220–1230. [Google Scholar] [CrossRef]
- Simsir, U.; Amasyali, M.F.; Bal, M.; Celebi, U.B.; Ertugrul, S. Decision support system for collision avoidance of vessels. Appl. Soft Comput. 2014, 25, 369–378. [Google Scholar] [CrossRef]
- Chin, H.C.; Debnath, A.K. Modeling perceived collision risk in port water navigation. Saf. Sci. 2009, 47, 1410–1416. [Google Scholar] [CrossRef] [Green Version]
- Goerlandt, F.; Montewka, J.; Kuzmin, V.; Kujala, P. A risk-informed ship collision alert system: Framework and application. Saf. Sci. 2015, 77, 182–204. [Google Scholar] [CrossRef]
- Fujii, Y.; Tanaka, K. Traffic Capacity. J. Navig. 1971, 4, 543–552. [Google Scholar] [CrossRef]
- Goodwin, E.M. A statistical study of ship domains. J. Navig. 1975, 28, 328–344. [Google Scholar] [CrossRef]
- Mazaheri, A.; Goelandt, F.; Kujala, P.; Montewka, J. A Decision Support Tool for VTS Centers to Detect Grounding Candidates. Int. J. Mar. Navig. Saf. Sea Transp. 2012, 6, 337–343. [Google Scholar]
- Kim, D.H.; Park, J.Y.; Lee, Y.S. A Study on the Development of Integrated Information System of Safety Management for Oil Tank Terminal; Korean Society of Marine Environment & Safety: Busan, Korea, 2014. [Google Scholar]
- Kim, D.J.; Ahn, K.S.; Lee, T.I.; Kim, Y.W. Development of Collision Avoidance Supporting System Based on ECDIS; Korean Institute of Navigation and Port Research: Busan, Korea, 2013. [Google Scholar]
- Lee, J.E. A Study on the Road Tunnel Lighting System Appied Fuzzy Reasoning and Dimming Control. Ph.D. Thesis, Hongik University, Seoul, Korea, 2015. [Google Scholar]
- Baldauf, M.; Mehdi, R.; Deeb, H.; Shröder-Hinrichs, J.U.; Benedict, K.; Krüger, C.; Fischer, S.; Gluch, M. Manoeuvring areas to adapt ACAS for the maritime domain. Sci. J. Marit. Univ. Szczec. 2015, 43, 39–47. [Google Scholar]
- Montewka, J.; Goerlandt, F.; Kujala, P. Determination of collision criteria and causation factors appropriate to a model for estimating the probability of maritime accidents. Ocean Eng. 2012, 40, 50–61. [Google Scholar] [CrossRef]
- Göhler, U.D. Estimation of Expectation Areas of Ships considering resistance changes, due to yaw angle and according to Model experiments. Schiffbauforschung 1983, 4, 235–246. [Google Scholar]
- Vessel Traffic Service Center. Available online: http://www.vtskorea.info/Board.do?flag=det&id =yeonjae_lecture&cPage=2&idx=51&limit=10&sc=SUBJECT&sv=&cg= (accessed on 26 July 2015).
- Wang, H.; Wei, Z.; Wang, S.S.; Ow, C.S.; Ho, K.T.; Feng, B.J.M. A Vision-based Obstacle Detection System for Unmanned Surface Vehicle. In Proceedings of the 2011 IEEE Conference on Robotics, Automation and Mechatronics (RAM), Qingdao, China, 17–19 September 2011.
- Incheon Port Marine Pilot’s Association. Available online: http://www.incheonpilot.com/main/main.asp (accessed on 26 July 2015).
- Pyeongtaek-Dangjin Port Marine Pilot’s Association. Available online: http://www.ptpilot.co.kr/pilotage/pilotage_08_06_01.aspx (accessed on 26 July 2015).
- Standards of Training, Certification & Watchkeeping. Available online: http://www.stcw.org/ (accessed on 25 August 2015).
- Kim, C.J.; Song, J.U.; Kim, C.H. A Study on the Development of the Module for Remote-Controlling Aids to Navigation. J. Korean Navig. Port Res. 2002, 26, 269–273. [Google Scholar]
- Seo, M.H. Service Implementation for the AIS Information and Maritime Safety Information in the Internet. Master’s Thesis, Mokpo National Maritime University, Mokpo, Korea, 2012. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nam, B.-W.; Lee, K.-H.; Lee, J.-M.; Kim, D.-S.; Ku, B.-J.; Li, R.; Yu, S.-S. A Study on the Estimation Method of Risk Based Area for Jetty Safety Monitoring. Sustainability 2015, 7, 13154-13168. https://doi.org/10.3390/su71013154
Nam B-W, Lee K-H, Lee J-M, Kim D-S, Ku B-J, Li R, Yu S-S. A Study on the Estimation Method of Risk Based Area for Jetty Safety Monitoring. Sustainability. 2015; 7(10):13154-13168. https://doi.org/10.3390/su71013154
Chicago/Turabian StyleNam, Byeong-Wook, Kyung-Ho Lee, Jung-Min Lee, Dae-Seok Kim, Bon-Jae Ku, Runqi Li, and Seong-Sang Yu. 2015. "A Study on the Estimation Method of Risk Based Area for Jetty Safety Monitoring" Sustainability 7, no. 10: 13154-13168. https://doi.org/10.3390/su71013154