Ensuring the Safety Sustainability of Large UAS: Learning from the Maintenance Risk Dynamics of USAF MQ-1 Predator Fleet in Last Two Decades

Abstract
:1. Introduction
2. Materials and Methods
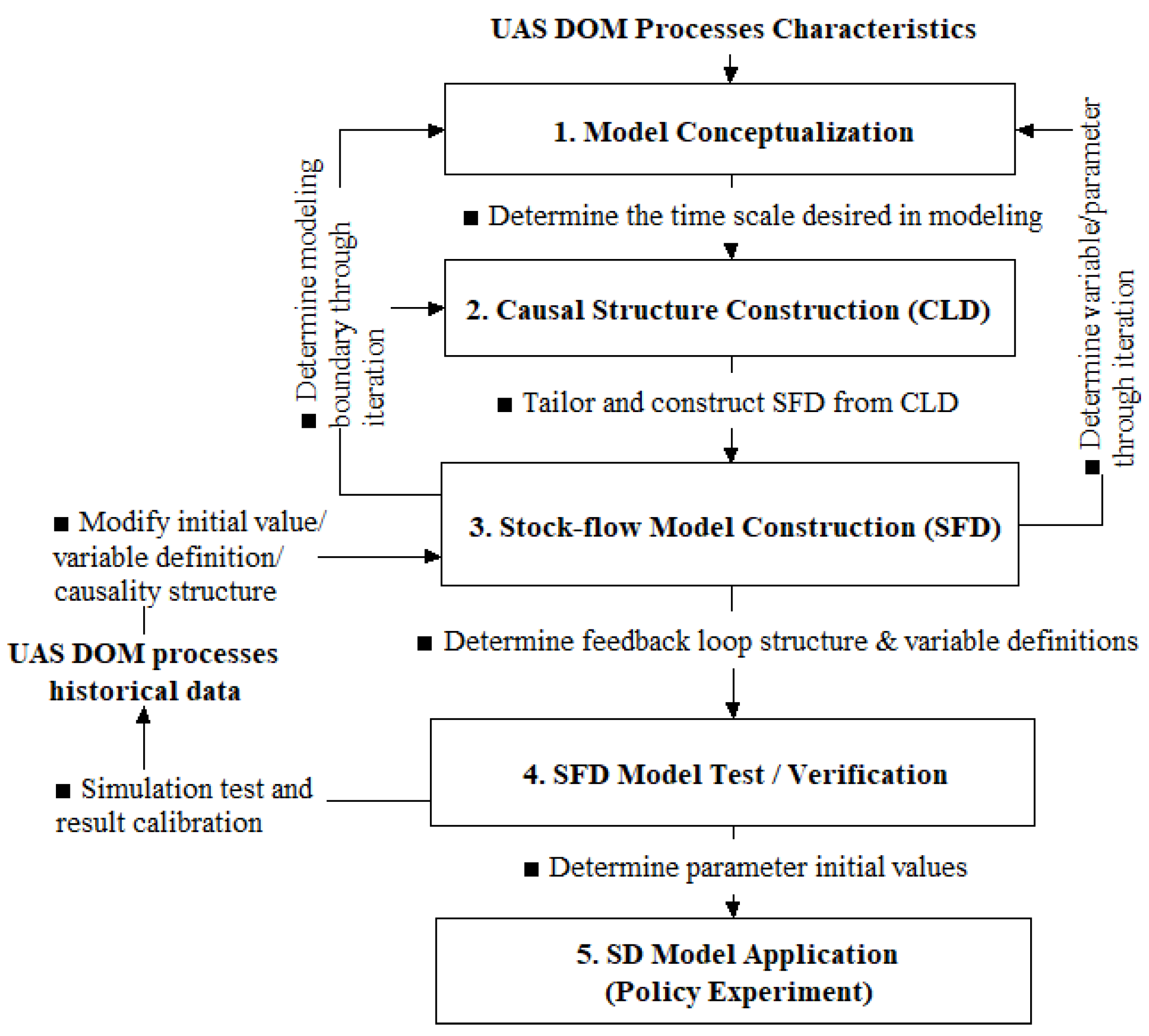
2.1. Model Conceptualization
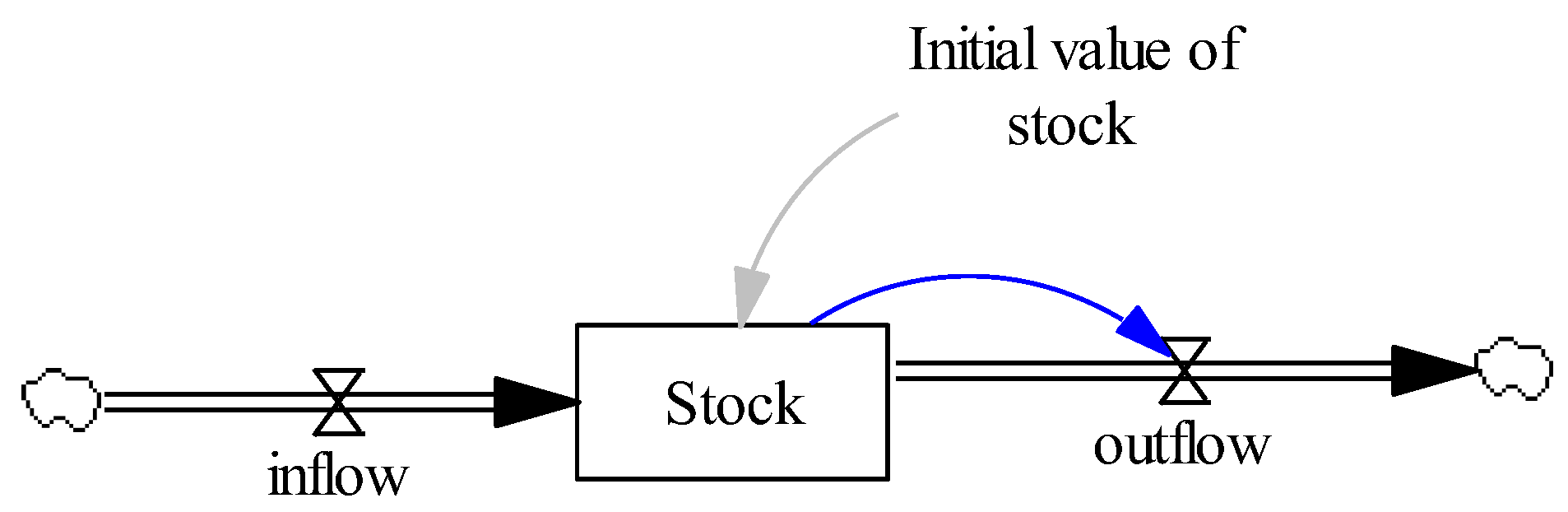
2.2. Model Formalization
2.3. SD Model Building Software
3. UAS Maintenance Risk Dynamic Mechanism
3.1. UAS Accident Data Collection
3.2. UAS Maintenance Risk Causal Loop Diagram
- The variables prefixed with ELi described the UAS performance and safety indicators belonging to the Emergency Level, such as EL1-Actual Total Mission Duration. This level represents the output information.
- The variables prefixed with TLj described the risk effects of critical system design flaws and reliability belonging to the Technical Level, such as TL1-Critical System Reliability Status.
- The variables prefixed with HLk described the maintainer-related risk factors in the Human Level, which involve two main aspects, both maintaining trainers and trainees, such as HL1-Average Mission Maintainer Experience.
- The variables prefixed with OLl described the organizational behaviors and decisions in the Organizational Level, such as OL1-Scheduled Total Mission Duration.
- In the Human Level (HL), maintainers directly learned from previous incidents/accidents, which helped reduce their task errors and then enhance the system reliability (in this stage, the dominant feedback loop was B1). When facing mission stresses, UAS-maintaining organizations trained more maintainers to satisfy the increasing mission requirements. However, due to a lack of qualified trainers, the increasing of maintainer experience encountered a delay (HL6HL1), and stayed in a relatively low level (see the B2 loop).
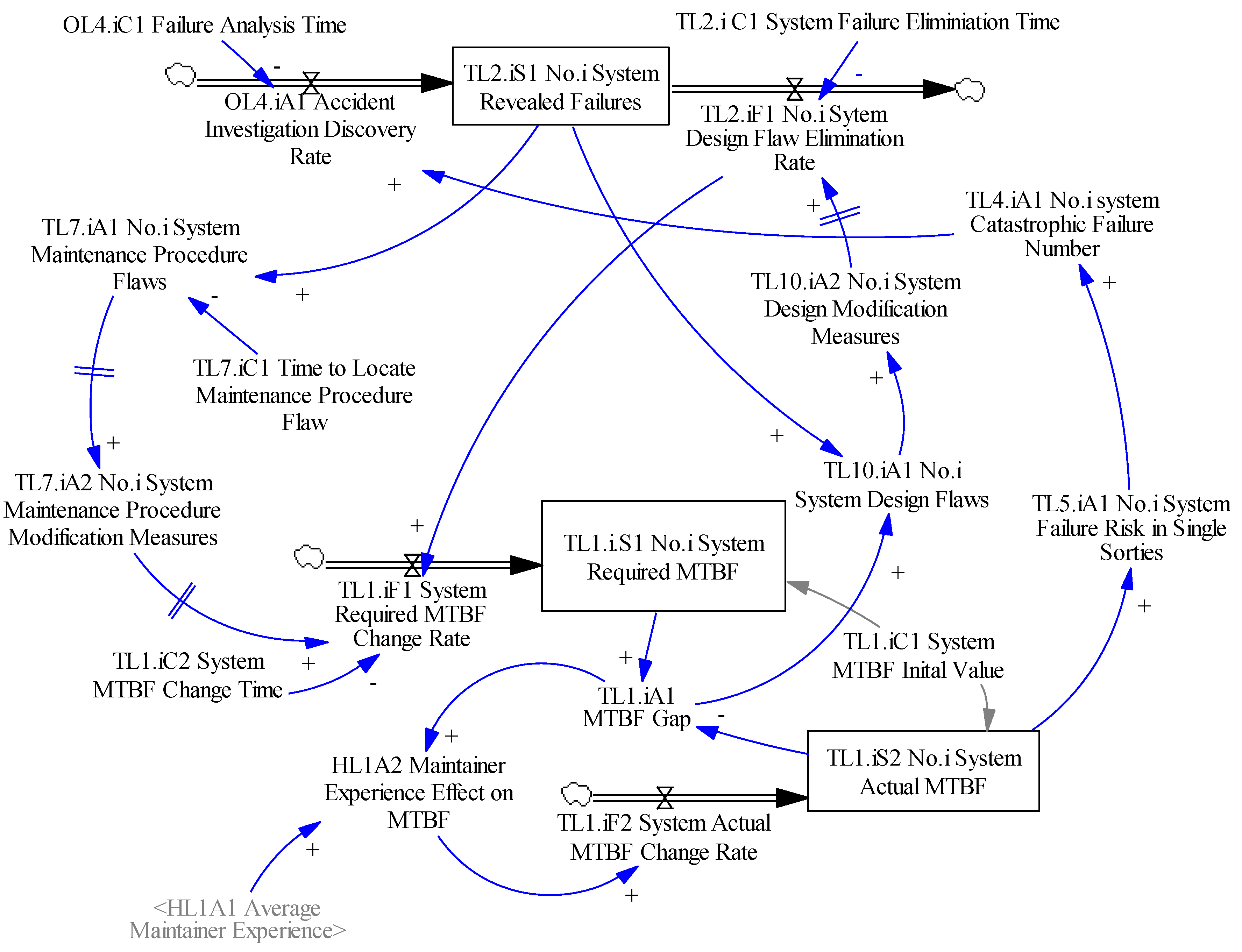
- In the Technical Level (TL), facing the reliability gaps in UAS operation, UAS development organizations modified the system design to reduce the possibilities of undesired system failures, such as improving component qualities and/or introducing redundancy characteristics (see the B3 and B4 loops). Yet, the adverse system interaction will also induce failure, which was modeled by the R1 loop.
4. Maintenance Risk Dynamics Model
4.1. Maintenance Risk Dynamic SFD
- Increase in experience from training (HL5F1): under the task pressures, the maintaining organization took efforts to train new maintainers (see the B2 loop). For the case of the USAF MQ-1 Predator, due to the high tempos in battle field missions, the trainers also played the role of maintainer, so the trainer population was also included in the variable HL2A1-Total Maintainer Population.
- Loss of experience from decay (HL5F2) and turnover (HL5F3): the maintainers lost experience through the deterioration process that mirrored memory loss, and skilled maintainer loss due to their turnover (i.e., attrition rate).
- Increase in experience from mission learning (HL5F4): the maintainers gained experience by spending time on the tasks and learning from the mishaps and accident investigation reports of the past. It was often known as “self re-learning” in literatures on training [37].
- Change in experience influenced by maintenance procedure modification (HL5F5): this factor modeled another category of maintainer mission experience change known as “training transfer”. The conceptual equation of the variable HL20F4 was defined as:
4.2. SFD Model Test and Calibration
4.3. SFD Model Verification
5. SFD-Based Safety Policy Experiment
6. Discussion
7. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Civil Aviation Organization (ICAO). Unmanned Aircraft Systems (UAV), 1st ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2011; pp. 3–5. [Google Scholar]
- US Department of Defense (US DoD). Unmanned Aerial Vehicles Roadmap, 2005–2203; Department of Defense, Office of the Secretary of Defense: Washington, DC, USA, 2005.
- Civil Aviation Authority (CAA). CAP 722 Unmanned Aircraft System Operations in UK Airspace–Guidance, 4th ed.; CAA: London, UK, 2010. [Google Scholar]
- Završnik, A. Drones and Unmanned Aerial Systems: Legal and Social Implications for Security and Surveillance; Springer International Publishing: Basel, Switzerland, 2016; pp. 5–8. [Google Scholar]
- Schaefer, R. Unmanned Aerial Vehicle Reliability Study; Office of the Secretary of Defense: Washington, DC, USA, 2003; pp. 1–57. [Google Scholar]
- Tvaryanas, A.; Thompson, W.; Constable, S. Human factors in remotely piloted aircraft operations: HFACS analysis of 221 mishaps over 10 years. Aviat. Space Environ. Med. 2006, 77, 724–732. [Google Scholar] [PubMed]
- Wiegmann, D.A.; Shappell, S.A. A Human Error Approach to Aviation Accident Analysis: The Human Factors Analysis and Classification System; Ashgate: Burlington, VT, USA, 2003; pp. 45–56. [Google Scholar]
- Murata, T. Petri nets: Properties, analysis and applications. Proc. IEEE 1989, 7, 541–580. [Google Scholar] [CrossRef]
- López-Grao, J.; Merseguer, J.; Campos, J. From UML activity diagrams to stochastic petri nets: Application to software performance engineering. In Proceedings of the WOSP’04, Redwood City, CA, USA, 14–16 January 2004; pp. 25–36. [Google Scholar]
- Chen, W.; Huang, S.P. Human reliability analysis for visual inspection in aviation maintenance by a Bayesian network approach. J. Transp. Res. Rec. 2014, 2499, 105–113. [Google Scholar] [CrossRef]
- Hubbard, S.M.; Lopp, D. An integrated framework for fostering human factor sustainability and increased safety in aviation ramp operations. J. Aviat. Technol. Eng. 2015, 5, 44–52. [Google Scholar] [CrossRef]
- Zhou, T.; Zhang, J.; Baasansuren, D. A hybrid HFACS-BN model for analysis of Mongolian aviation professionals’ awareness of human factors related to aviation safety. Sustainability 2018, 10, 4522. [Google Scholar] [CrossRef]
- Moizer, J.D. System Dynamics Modelling of Occupational Safety: A Case Study Approach. Ph.D. Thesis, University of Stirling, Stirling, UK, 1999. [Google Scholar]
- Sterman, J.D. Business Dynamics: Systems Thinking and Modeling for a Complex World; Irwin/Mac-Graw Hill: Boston, MA, USA, 2002; pp. 15–25. [Google Scholar]
- Yu, J.; Yang, P.; Zhang, K.; Wang, F.; Miao, L. Evaluating the effect of policies and the development of charging infrastructure on electric vehicle diffusion in China. Sustainability 2018, 10, 3394. [Google Scholar] [CrossRef]
- Bouloiz, H.; Garbolino, E.; Tkiouat, M.; Guarnieri, F. A system dynamics model of behavioral analysis of safety conditions in a chemical storage unit. Saf. Sci. 2013, 58, 32–40. [Google Scholar] [CrossRef]
- Bießlich, P.; Schröder, M.; Gollnick, V. A system dynamics approach to airport modeling. In Proceedings of the 14th AIAA Aviation Technology, Integration, and Operations Conference, Atlanta, GA, USA, 16–20 June 2014. [Google Scholar]
- Xu, J.; Xie, H.; Dai, J. Post-seismic allocation of medical staff in the Longmen Shan fault area: Case study of the Lushan earthquake. Environ. Hazards Hum. Policy Dimens. 2015, 14, 289–311. [Google Scholar] [CrossRef]
- Rusuli, Y.; Li, L.; Ahmad, S. Dynamics model to simulate water and salt balance of Bosten lake in Xinjiang, China. Environ. Earth Sci. 2015, 74, 2499–2510. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, S.; Hao, L.; Huangfu, H.; Sheng, H. System dynamics modeling of the safety evolution of blended-wing-body subscale demonstrator flight testing. Saf. Sci. 2016, 89, 219–230. [Google Scholar] [CrossRef]
- Roberts, N.; Andersen, D.; Deal, R.; Garet, M.; Shaffer, W. Introduction to Computer Simulation: A System Dynamic Modelling Approach; Addison-Wesley: Reading, MA, USA, 1983; pp. 25–40. [Google Scholar]
- Coyle, R.G. System Dynamics Modelling: A Practical Approach; Chapman and Hall: London, UK, 1996; pp. 15–35. [Google Scholar]
- Wolstenholme, E. The Evaluation of Management Information Systems: A Dynamic and Holistic Approach; Wiley: Chichester, UK, 1993. [Google Scholar]
- Civil Aviation Administration of China (CAAC). MD-TM-2009-002 Civil Unmanned Aerial Vehicle Air Traffic Management Measures; CAAC Air Traffic Management Bureau: Beijing, China, 2009. (In Chinese) [Google Scholar]
- Nullmeryer, R.T.; Herz, R.; Montijo, G.A. Training interventions to reduce air force Predator mishaps. In Proceedings of the 15th International Symposium on Aviation Psychology, Dayton, OH, USA, 27–30 April 2009. [Google Scholar]
- Nullmeryer, R.T.; Herz, R.; Montijo, G.A.; Leonik, R. Birds of prey: Training solutions to human factors issues. In Proceedings of the Interserive/Industry Training, Simulation, and Education Conference (I/ITSEC), Dayton, OH, USA, 2–6 December 2007. [Google Scholar]
- Marais, K.B.; Saleh, J.H.; Leveson, N.G. Archetypes for organizational safety. Saf. Sci. 2006, 44, 565–582. [Google Scholar] [CrossRef]
- Cooke, D.L.; Rohleder, T.R. Learning from incidents: From normal accidents to high reliability. Syst. Dyn. Rev. 2006, 22, 213–239. [Google Scholar] [CrossRef]
- Leveson, N.G. Engineering a Safer World; MIT Press: Cambridge, MA, USA, 2012; pp. 55–95. [Google Scholar]
- Leveson, N.G. A new accident model for engineering safer systems. Saf. Sci. 2004, 42, 237–270. [Google Scholar] [CrossRef] [Green Version]
- Checkland, P. Systems Thinking, Systems Practice; John Wiley & Sons: New York, NY, USA, 1981. [Google Scholar]
- Weinberg, G. An Introduction to General Systems Thinking; John Wiley & Sons: New York, NY, USA, 1975. [Google Scholar]
- US Department of Defense (US DoD). Report to Congress on Future Unmanned Aircraft Systems Training, Operation, and Sustainability; Department of Defense, Under Secretary of Defense for Acquisition, Technology and Logistics: Washington, DC, USA, 2012.
- US Department of Defense (US DoD). Unmanned Aerial Vehicles Roadmap, 2013–2035; Department of Defense, Office of the Secretary of Defense: Washington, DC, USA, 2013.
- Williams, K.W. A Summary of Unmanned Aircraft Accident/incident Data: Human Factors Implications; Civil Aerospace Medical Institute, FAA: Oklahoma City, OK, USA, 2004. [Google Scholar]
- Montijo, G.; Kaiser, D.; Spiker, V.A.; Nullmeryer, R.T. Training interventions to reduce flight mishaps. In Proceedings of the Interserive/Industry Training, Simulation, and Education Conference (I/ITSEC), Orlando, FL, USA, 1–4 December 2008. [Google Scholar]
- Lu, Y.; Marais, K.B.; Zhang, S. Conceptual modeling of training and organizational risk dynamics. Procedia Eng. 2014, 80, 313–328. [Google Scholar] [CrossRef]
- Hobbs, A.; Herwitz, S.R. Human Challenges in the Maintenance of Unmanned Aircraft Systems; NASA Research Report; NASA Research Park: Moffett Filed, CA, USA, 2006. [Google Scholar]
- Bella, R.L.; Quelhas, O.L.; Ferraz, F.T.; Bezerra, M.J. Workplace spirituality: Sustainable work experience from a human factors perspective. Sustainability 2018, 10, 1887. [Google Scholar] [CrossRef]
- Ramalingam, K.; Kalawsky, R.; Noonan, C. Integration of unmanned aircraft system (UAS) in non-segregated airspace: A complex system of systems problem. In Proceedings of the 2011 IEEE International Systems Conference, Montreal, QC, Canada, 4–7 April 2011; pp. 1–8. [Google Scholar]
- Li, W. Unmanned Aerial Vehicle Operation Management; Beihang University Press: Beijing, China, 2011; pp. 15–19. (In Chinese) [Google Scholar]
- European Aviation Safety Agency (EASA). A-NPA No 16-2005 Policy for Unmanned Aerial Vehicle (UAV) Certification; European Aviation Safety Agency: Cologne, Germany, 2005.
- Federal Aviation Administration (FAA). ORDER8130.34-2008 Airworthiness Certification of Unmanned Aircraft Systems; F of Transportation, FAA: Washington, DC, USA, 2008.
- European Aviation Safety Agency (EASA). Concept of Operations for Drones, a Risk Based Approach to Regulation of Unmanned Aircraft; European Aviation Safety Agency: Cologne, Germany, 2015.
- Clothier, R.A.; Palmer, J.L.; Walker, R.A.; Fulton, N.L. Definition of an airworthiness certification framework for civil unmanned aircraft systems. Saf. Sci. 2011, 49, 871–885. [Google Scholar] [CrossRef] [Green Version]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CAAC 1 | US DOD/FAA | CAA | Public Safety Effects | Classical Types |
|---|---|---|---|---|
| Micro UAV: ≤7 kg Light UAV: 7–25 kg | Category I: ≤9 kg Category II: 9–25 kg (Small) | Small UAV: ≤20 kg Light UAV: 20–25 kg | Direct VLOS 2; low ground impact energy | Raven, DJI Phantom series, Penguin B (e.g., quadcopter types or short-scale fixed wing) |
| Light UAV: 25–116 kg Small UAV: 116–500 kg | Category III: <599 kg (Medium) | Light UAV: 25–150 kg Large UAS: >150 kg | RLOS 2, might access manned vehicle airspace, medium ground impact energy | RQ-5 Hunter RQ-7 Shadow |
| Small UAV: 500–5700 kg Large UAV: >5700 kg | Category IV: >599kg (Large) | Satellite relay data links; might be integrated in manned vehicle airspace, significant ground impact energy | MQ-1B Predator MQ-9A Reaper RQ-4 Global Hawk |
| Loop Groups | Causal Loops | Nodal Variables |
|---|---|---|
| 1. Effects of self-learning and training on maintainer occupational experience (B1/B2) | B1 (Mission experience and accident learning) B2 (Maintainer population changes) | TL2-TL3-HL5-HL1 (B1) HL4-HL2 (B2) |
| 2. Critical system reliability, system failure risk and interactions (B3/B4/R1) | B3 (System design modifications) B4 (Reduce revealed failures) R1 (System interaction induced failures) | TL10-TL1 (B3) TL2-TL10 (B4) TL4-TL6-TL5 (R1) |
| 3. Side effects of procedure modification (R2) | R2 (Maintenance procedure modifications) | HL1-TL2-TL7-HL5 (R2) |
| Loop Groups | Basis for VVC | Time horizon (month) | ||||
|---|---|---|---|---|---|---|
| 12th | 60th | 120th | 180th | 240th | ||
| OL5S1-Actual UAS Number | Gaps between OL5S1 and the historical data (%) | −1.08 | −5.98 | −4.50 | −2.37 | 1.16 |
| HL6A1-Required Maintainer Population | Relative ratios between OL6A1 and the historical maintainer population | 2.39 | 1.12 | 1.04 | 1.20 | 1.086 |
| EL4A1-Maintenance-Related Mission Cancellation | Relative ratios between EL4A1 and the historical total mission sorties | 0.568 | 0.334 | 0.225 | 0.188 | 0.132 |
| TL1.1S2-Propulsion System Actual MTBF | Gaps between TL1.1S2 and the historical propulsion system MTBF (%) | 0 | 22.9 | 7.41 | −9.83 | −2.37 |
| Cases | Strategies | Parameters in Base Run | Parameters in Experiment Run |
|---|---|---|---|
| Policy 1 | 200% initial maintainer experience achieved after training (enhanced training measures, unit: %) | HL5C1 = 30 | HL5C1 = 60 |
| Policy 2 | 130% initial MTBF of propulsion system achieved (modified system design, unit: hours) | TL1.1C1 = 150 | TL1.1C1 = 200 |
| Changes over Base Run (%) | Time Horizon (month) | ||||
|---|---|---|---|---|---|
| 12th | 60th | 120th | 180th | 240th | |
| OL5S1-Actual UAS Number | −1.08 | −5.98 | −4.50 | −2.37 | 1.16 |
| HL6A1-Required Maintainer Population | 2.39 | 1.12 | 1.04 | 1.20 | 1.086 |
| EL4A1-Maintenance Related Mission Cancellation | 0.568 | 0.334 | 0.225 | 0.188 | 0.132 |
| TL1.1S2-Propulsion System Actual MTBF | 0 | 22.9 | 7.41 | −9.83 | −2.37 |
| Changes over Base Run (%) | Time Horizon (month) | ||||
|---|---|---|---|---|---|
| 12th | 60th | 120th | 180th | 240th | |
| TL4.1A1 –Times of Propulsion System Catastrophic Failure | −11.50 | −9.22 | −10.60 | −8.52 | −6.15 |
| EL5A1-Class A Mishaps per 105 H | −5.51 | −5.26 | −5.40 | −3.30 | −3.24 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Qian, Y.; Huangfu, H.; Zhang, S.; Fu, S. Ensuring the Safety Sustainability of Large UAS: Learning from the Maintenance Risk Dynamics of USAF MQ-1 Predator Fleet in Last Two Decades. Sustainability 2019, 11, 1129. https://doi.org/10.3390/su11041129
Lu Y, Qian Y, Huangfu H, Zhang S, Fu S. Ensuring the Safety Sustainability of Large UAS: Learning from the Maintenance Risk Dynamics of USAF MQ-1 Predator Fleet in Last Two Decades. Sustainability. 2019; 11(4):1129. https://doi.org/10.3390/su11041129
Chicago/Turabian StyleLu, Yi, Ying Qian, Huayan Huangfu, Shuguang Zhang, and Shan Fu. 2019. "Ensuring the Safety Sustainability of Large UAS: Learning from the Maintenance Risk Dynamics of USAF MQ-1 Predator Fleet in Last Two Decades" Sustainability 11, no. 4: 1129. https://doi.org/10.3390/su11041129