Surveying and Digital Restoration of Towering Architectural Heritage in Harsh Environments: a Case Study of the Millennium Ancient Watchtower in Tibet


Abstract
:1. Introduction
2. Background
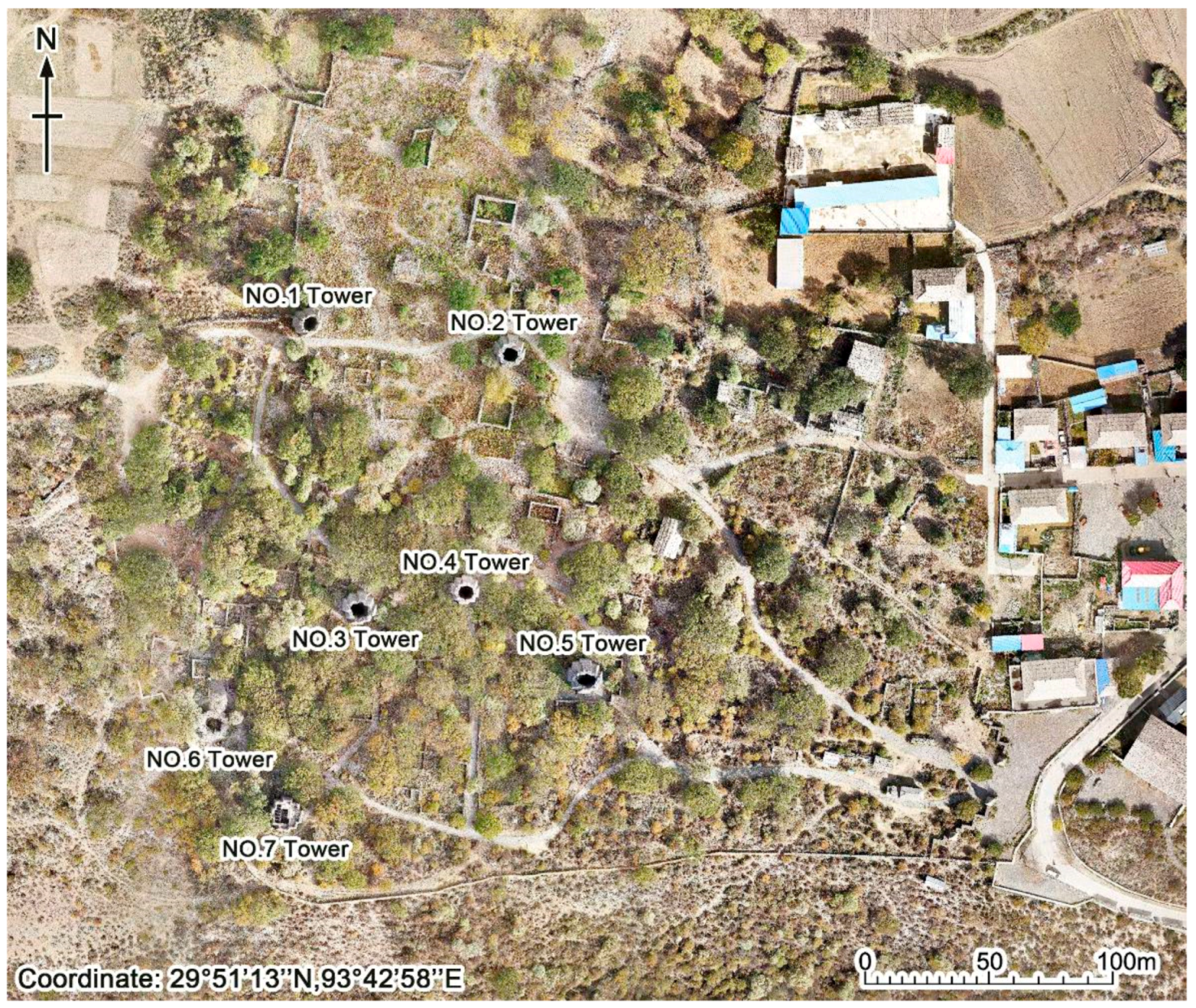
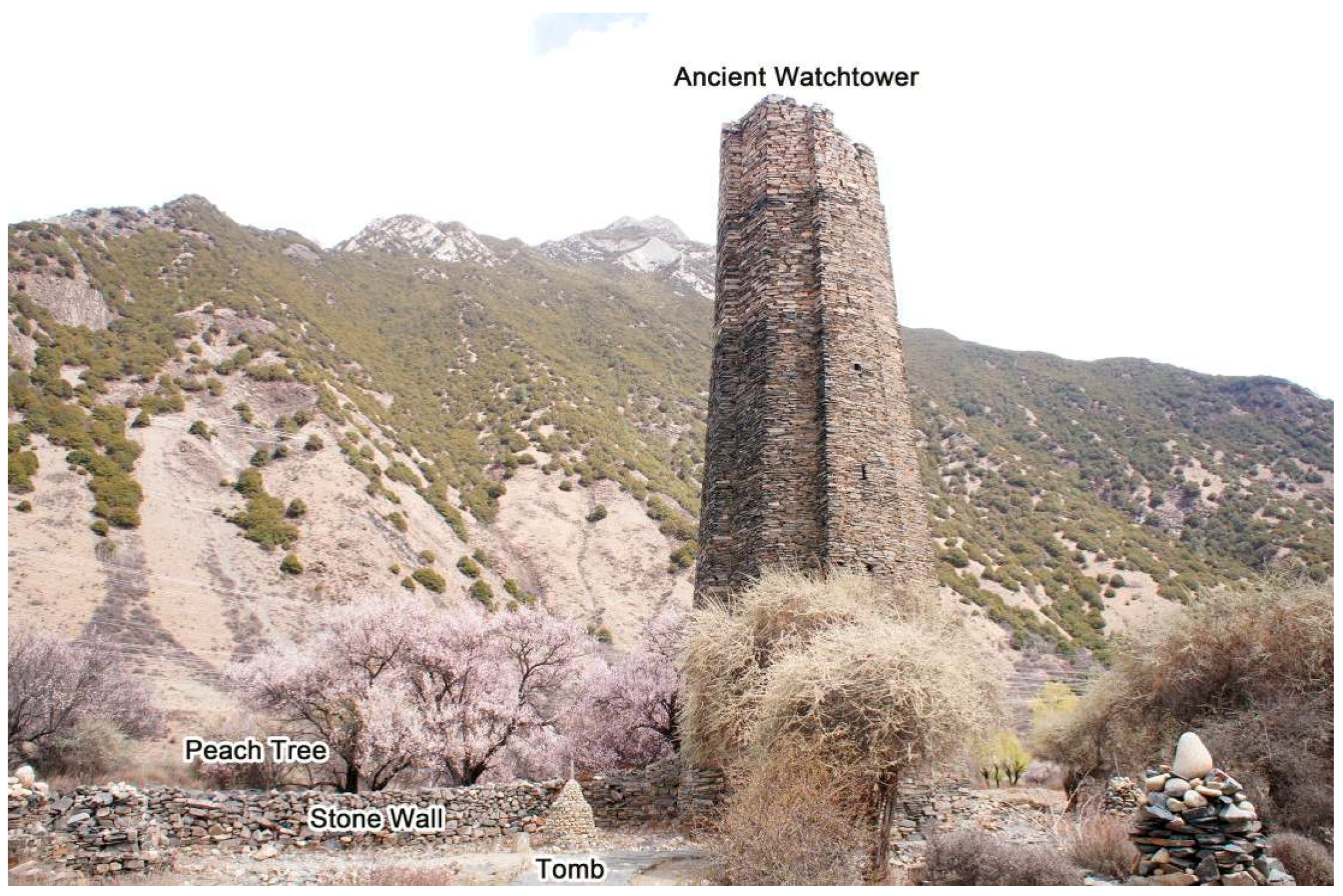
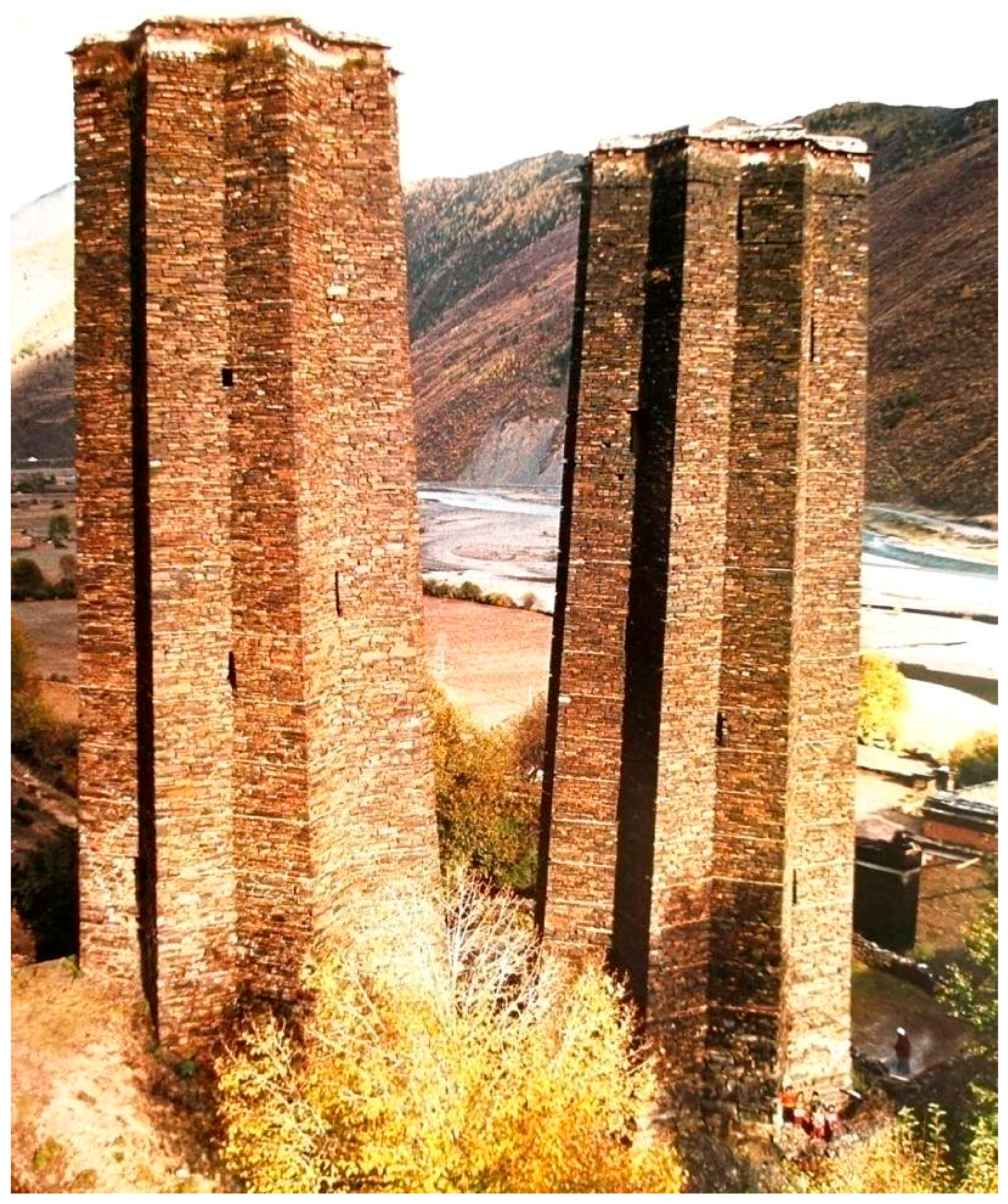
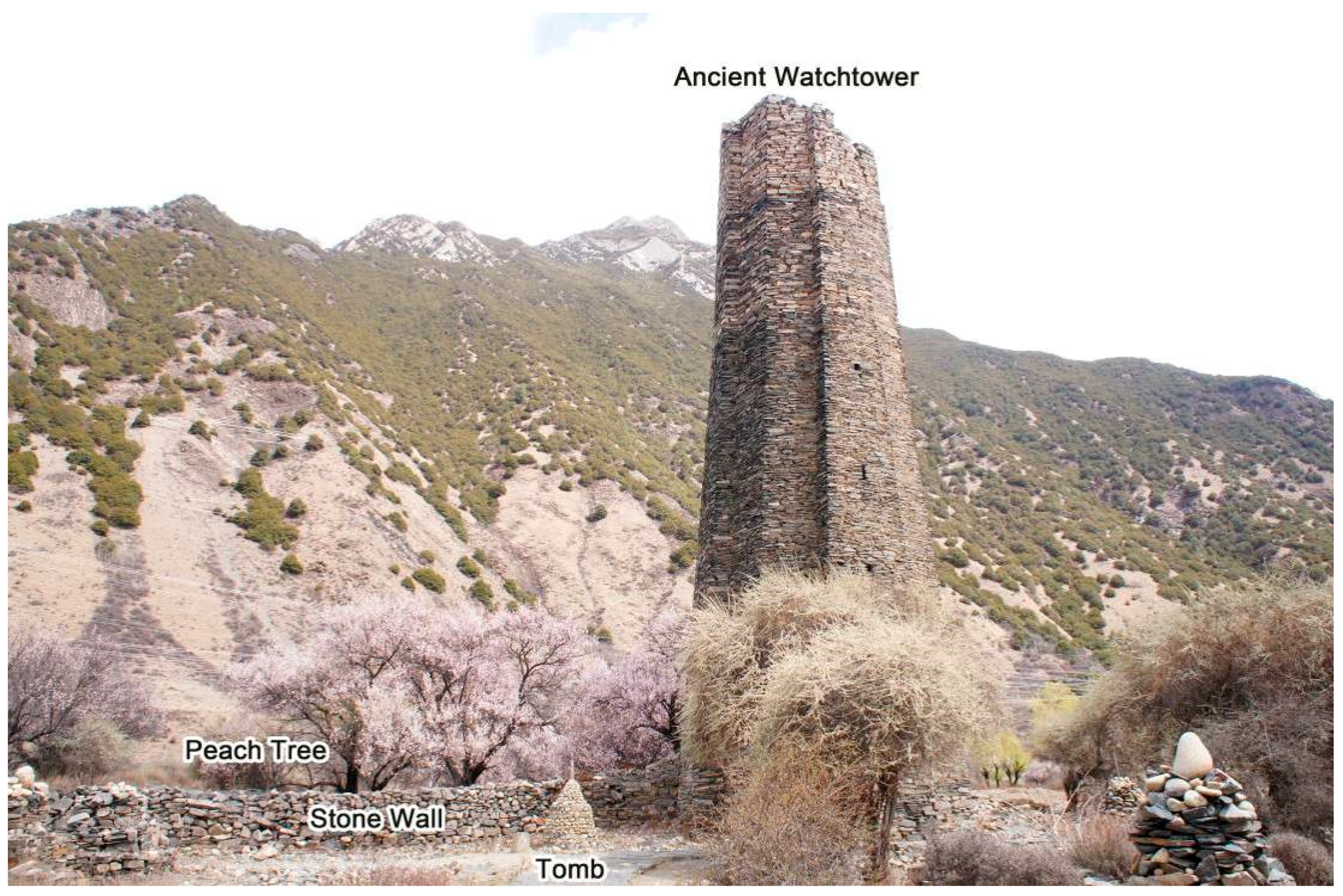
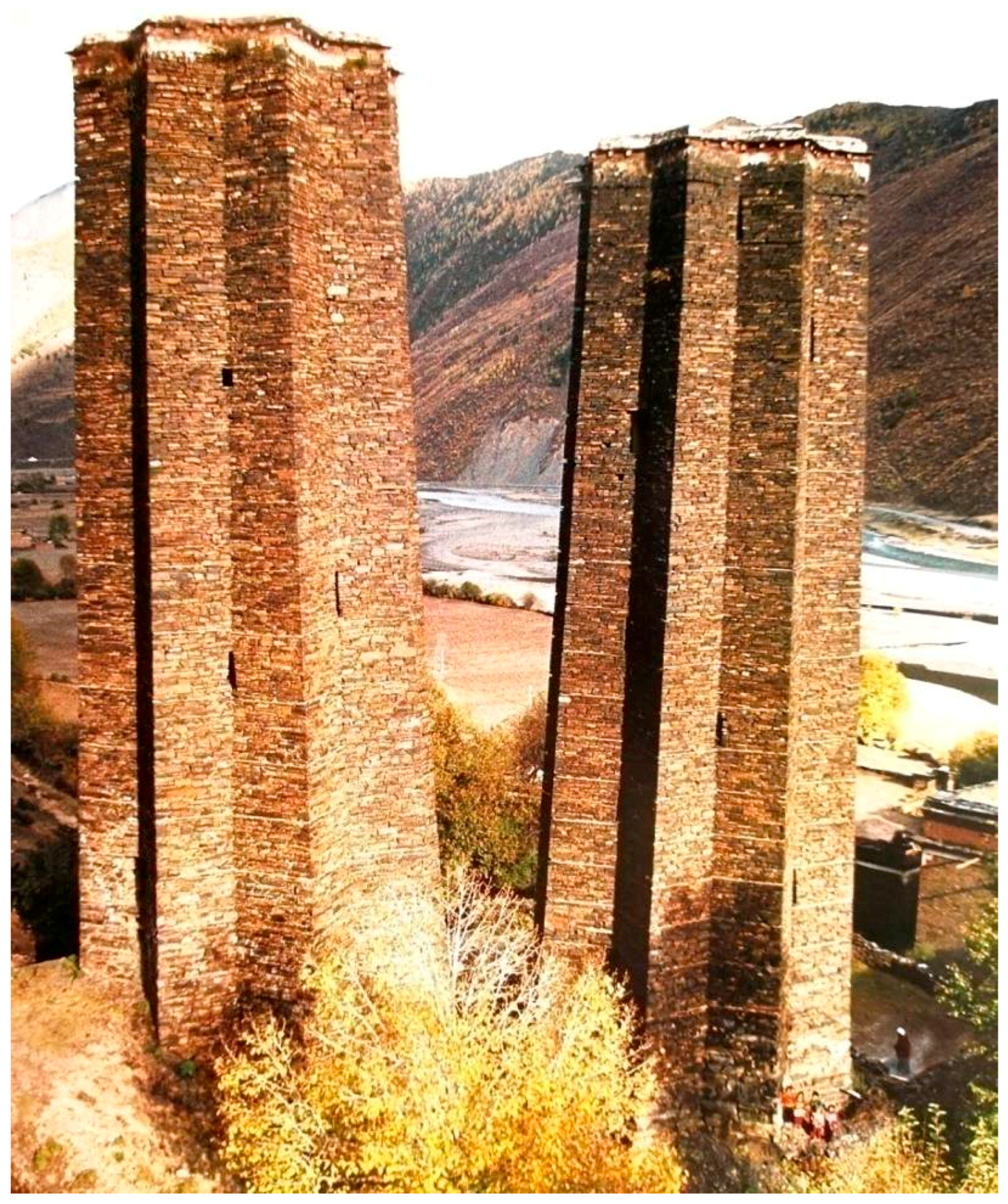
2.1. Overview of the Limestone Hall of the Xiuba Ancient Watchtower
2.2. Research Objectives and Surveying Problems
2.2.1. Research Objectives
2.2.2. Problems Encountered
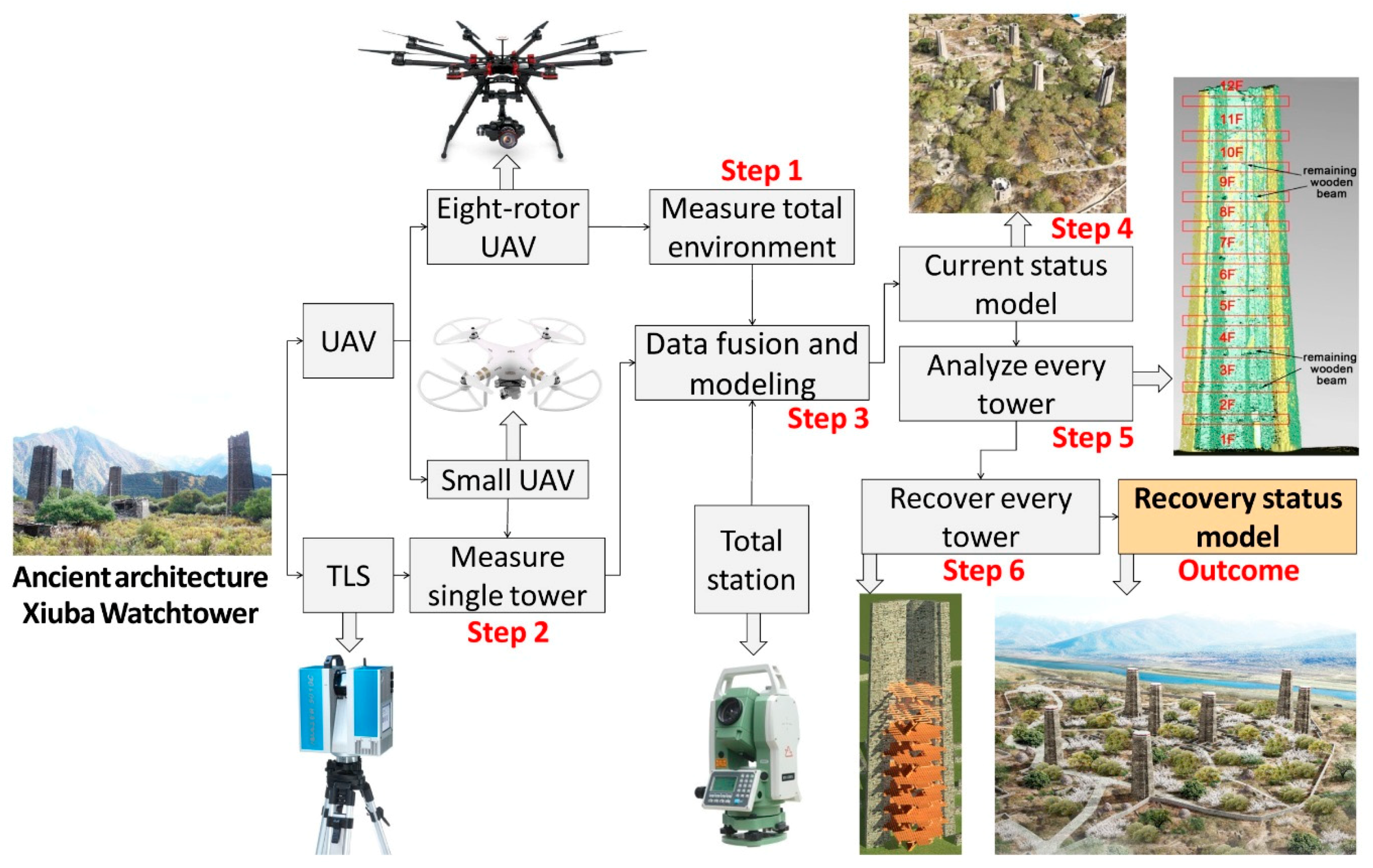
3. Research Strategies
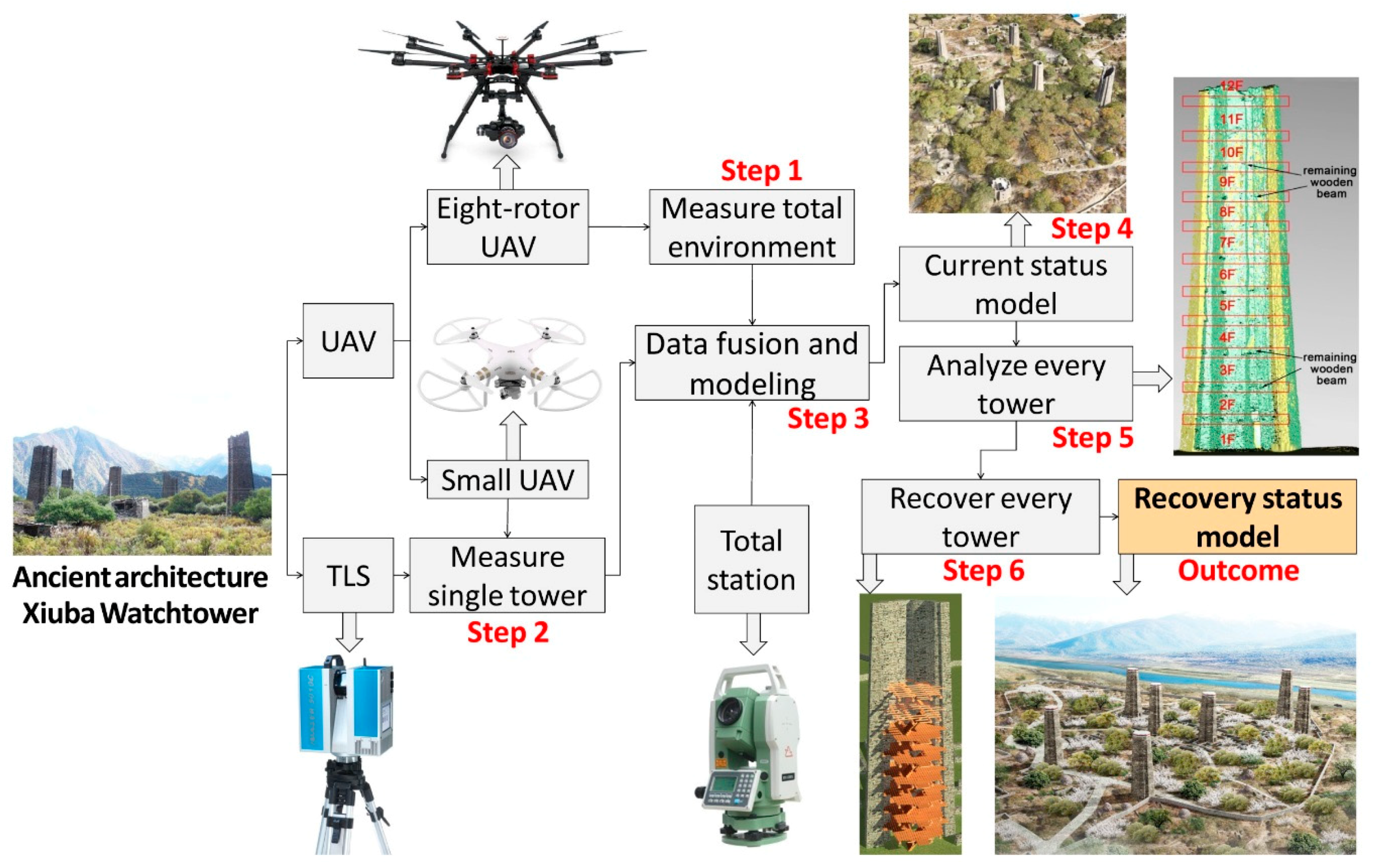
3.1. The Technical Flow Chart
3.2. Specific Implementation Processes
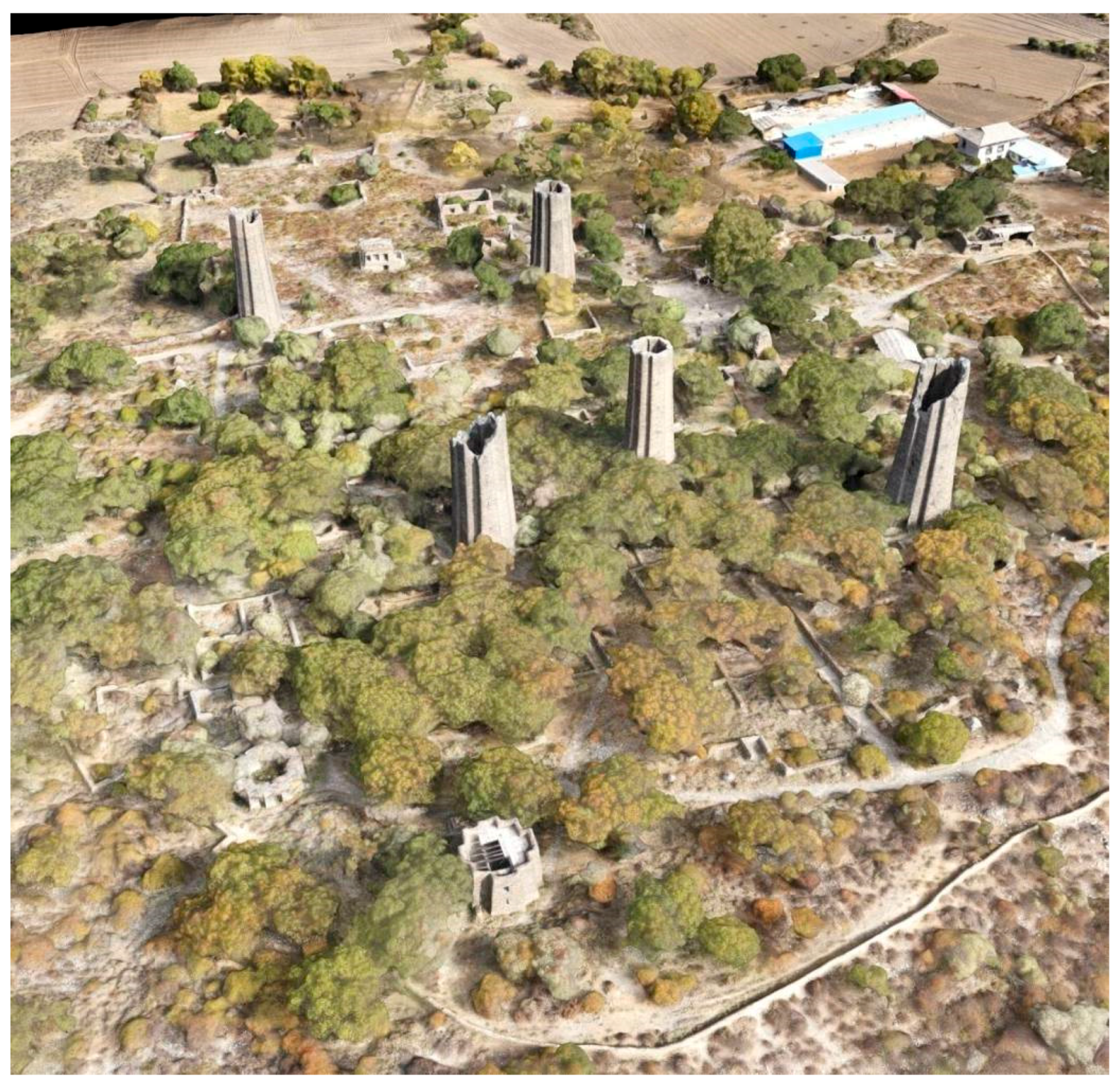
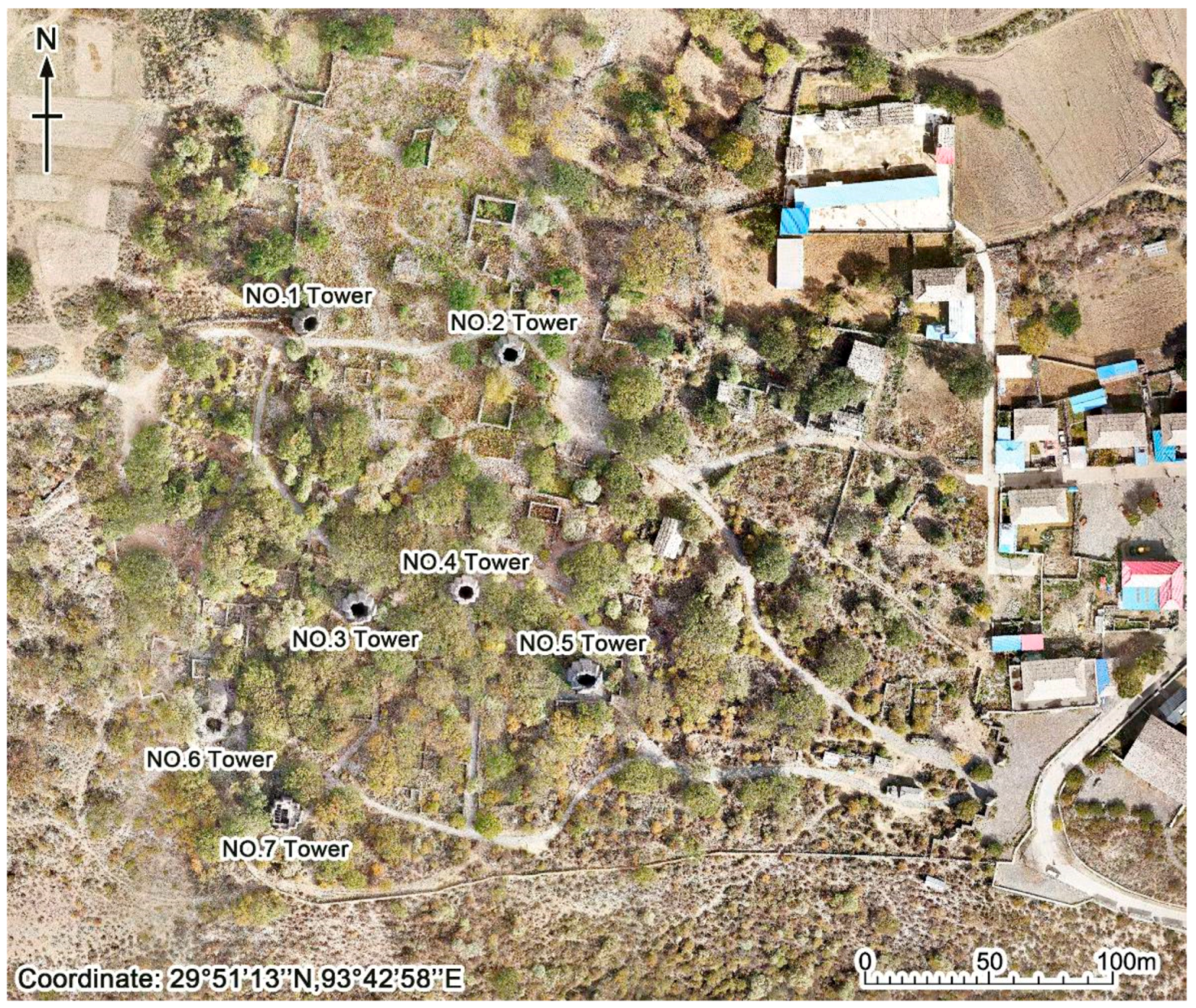
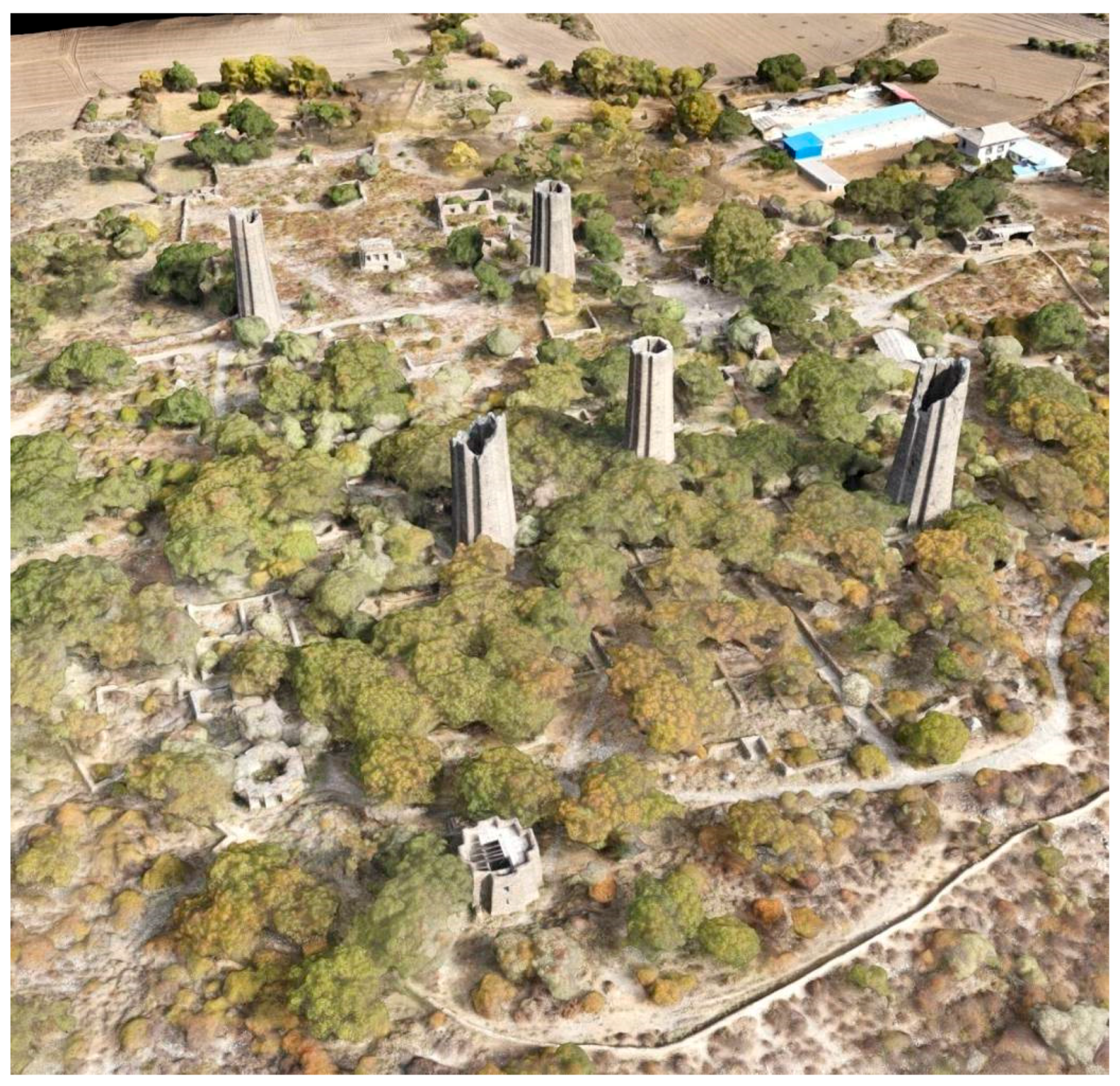
3.2.1. Collection of Data on the Overall Environment of the Watchtower Complex
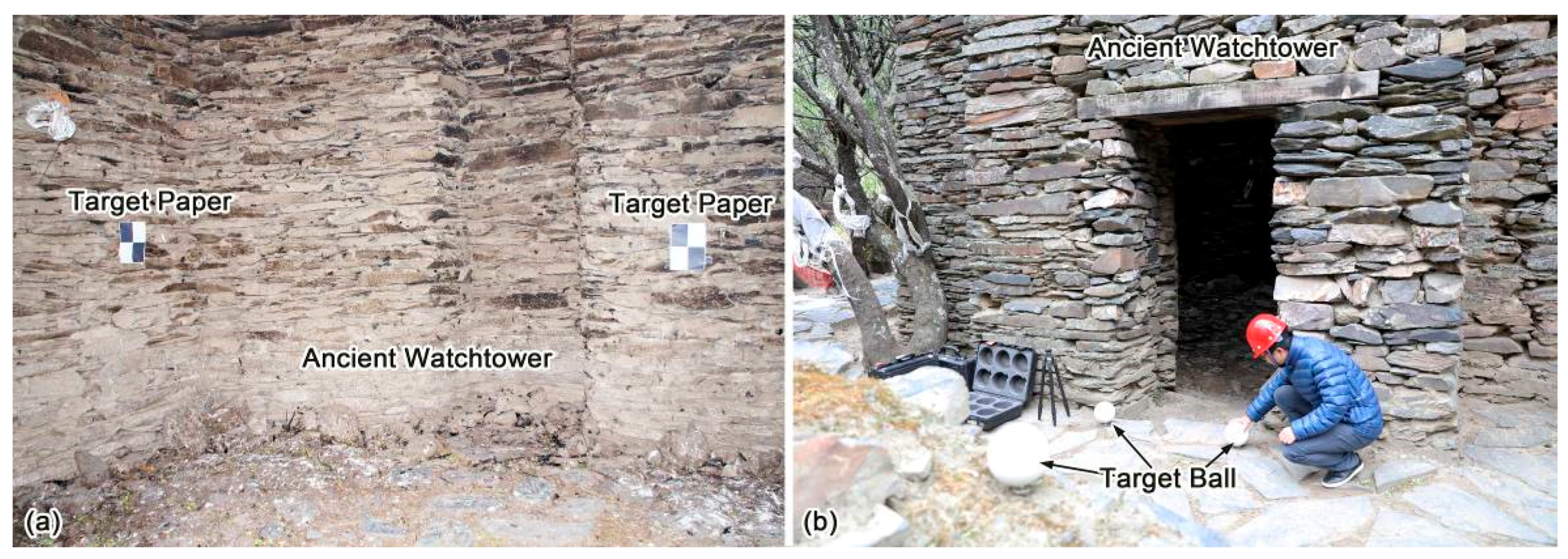
3.2.2. Layout and Survey of the Target
3.2.3. Collection of Data from the Exterior of a Single Watchtower
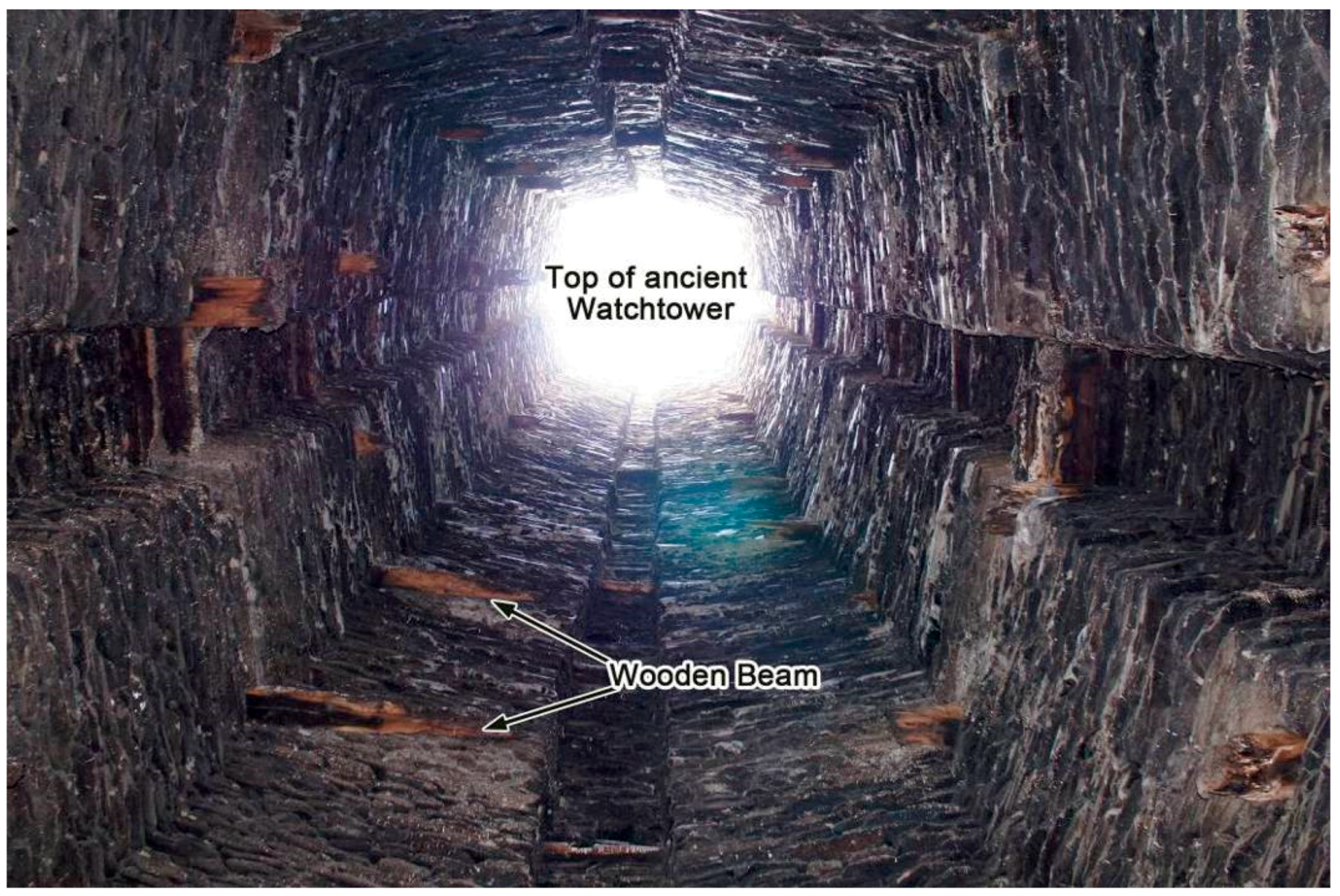
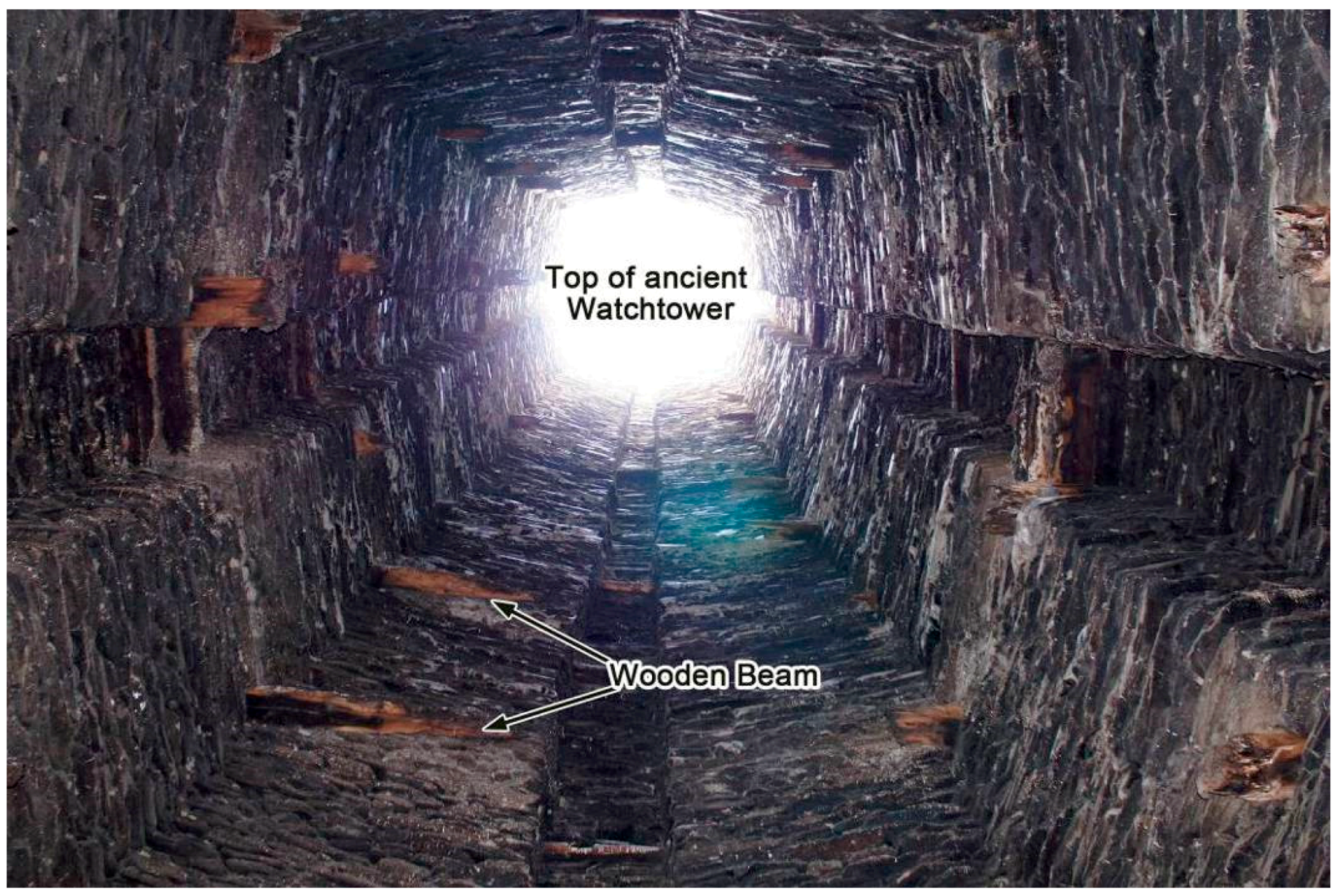
3.2.4. Collection of Data from the Interior of a Single Watchtower
3.2.5. Data Processing and Fusion and the Generation of Status Model
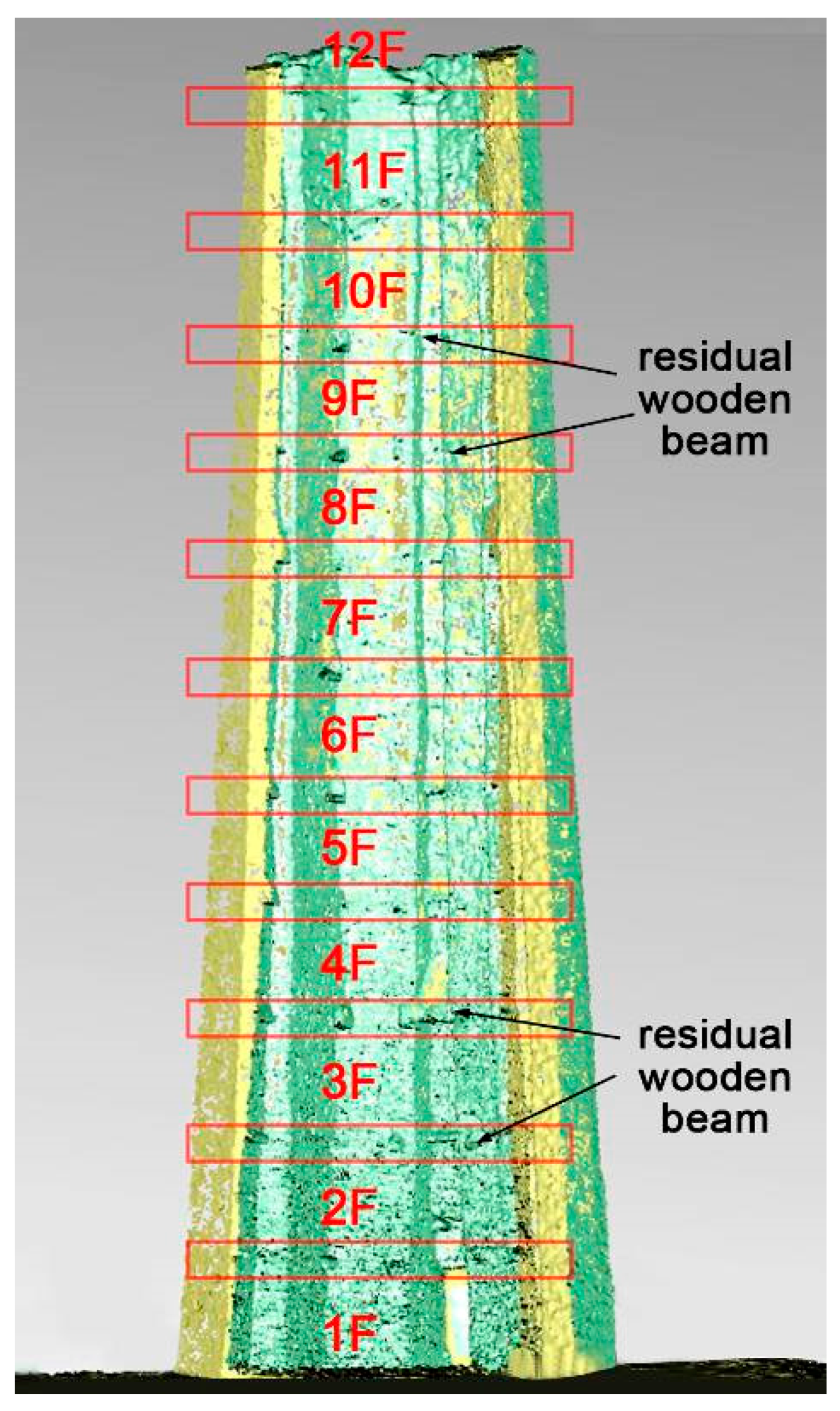
3.2.6. Analysis of the 3D Status Model and Proposal of the Virtual Restoration Scheme
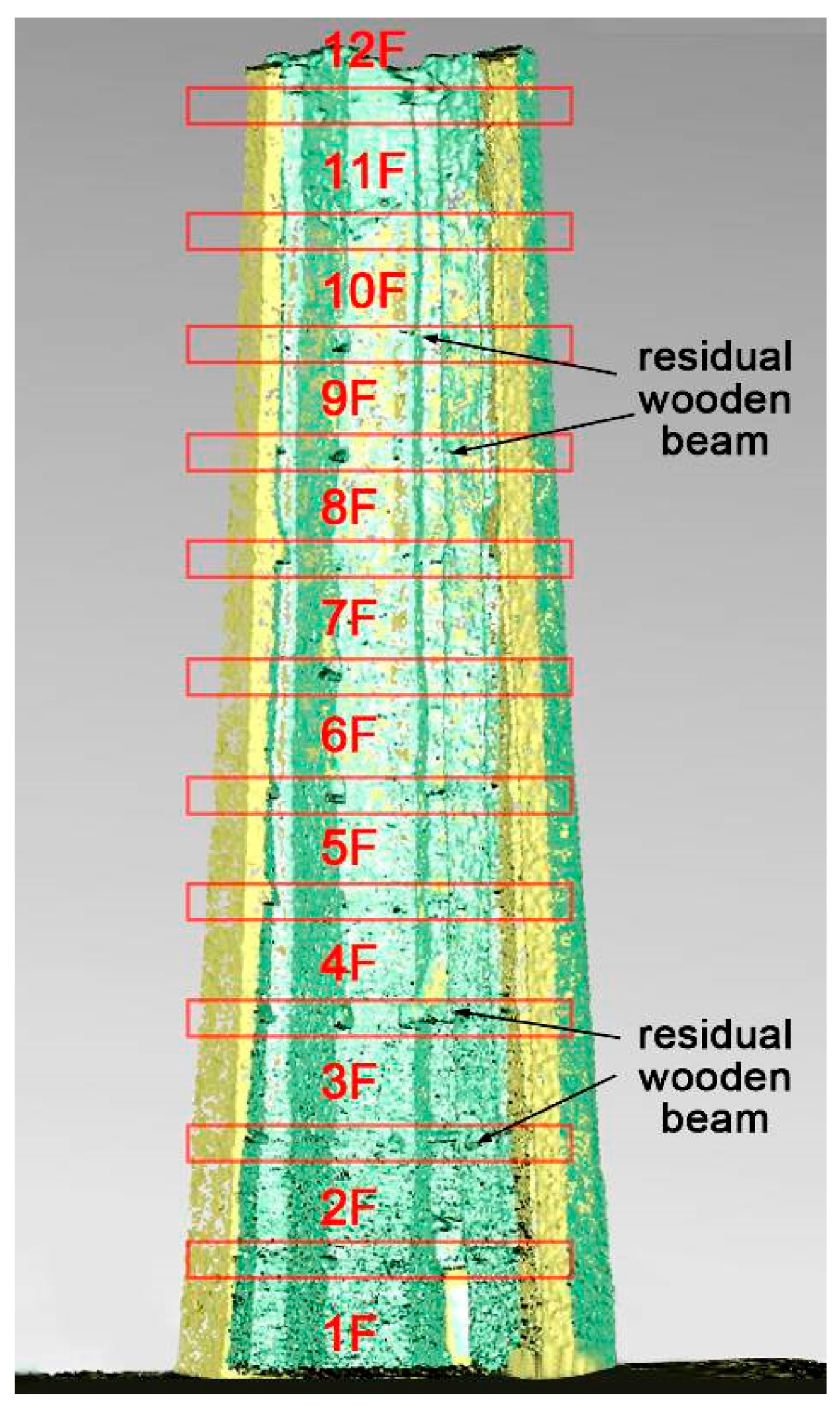
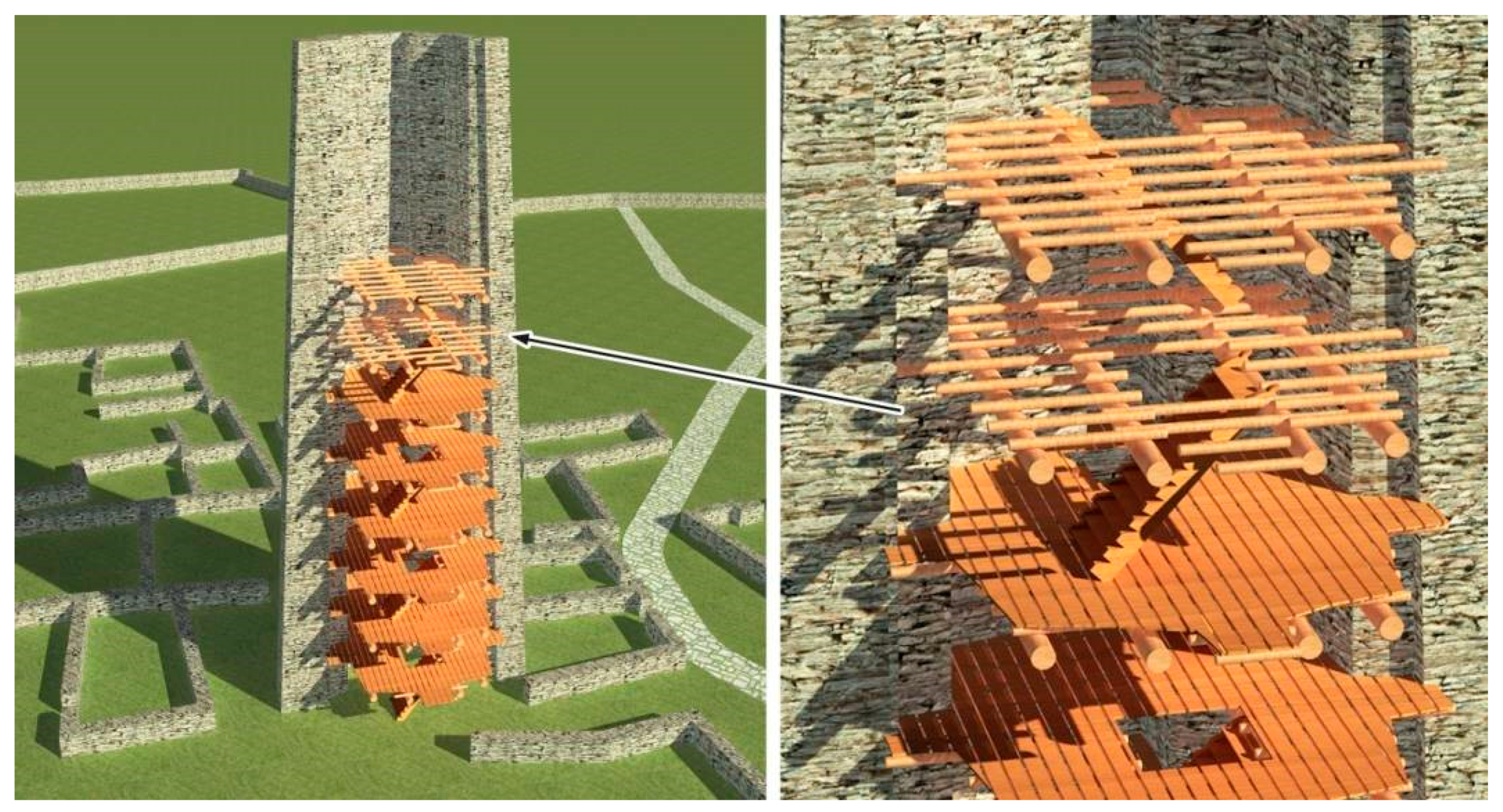
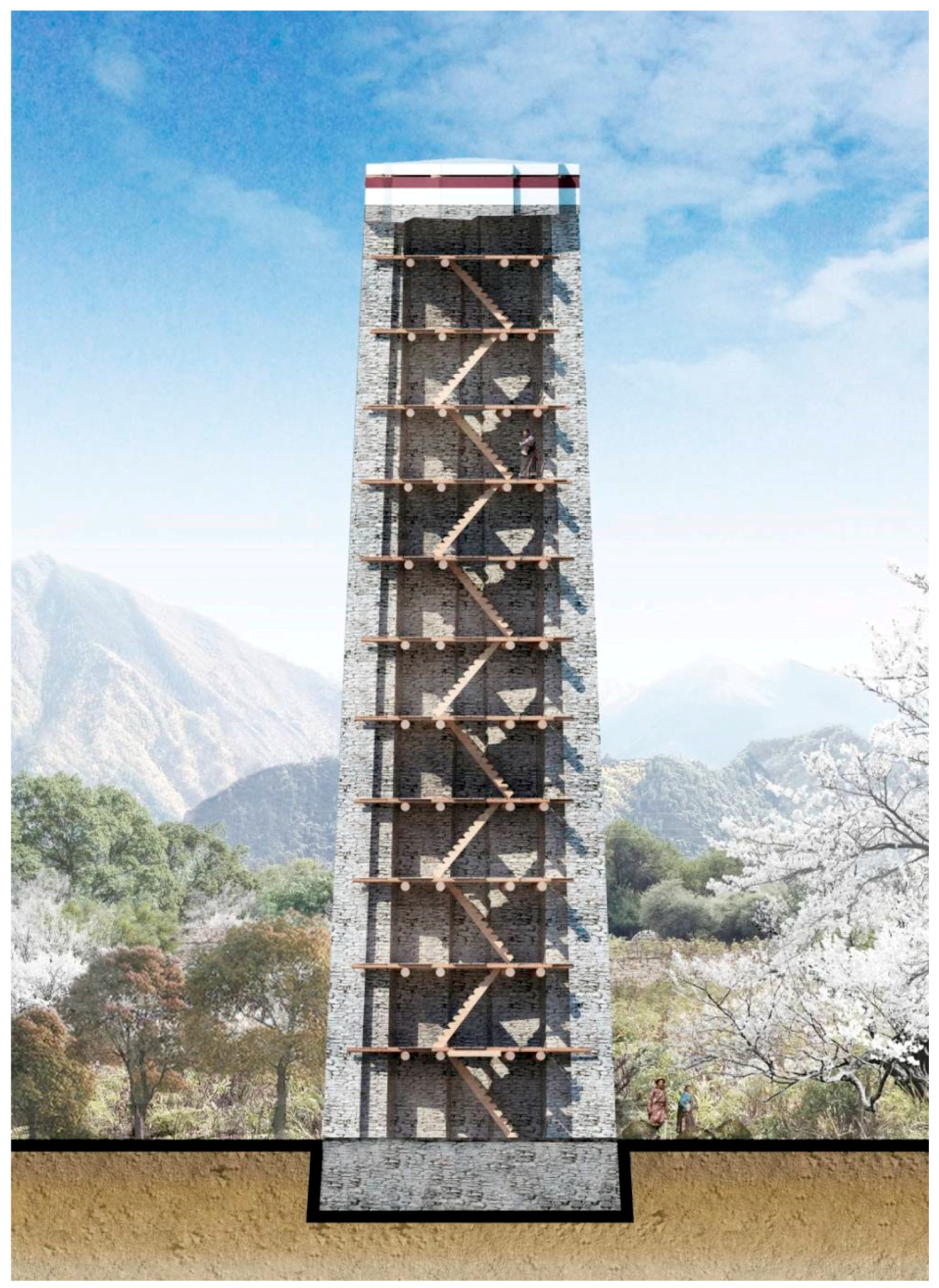
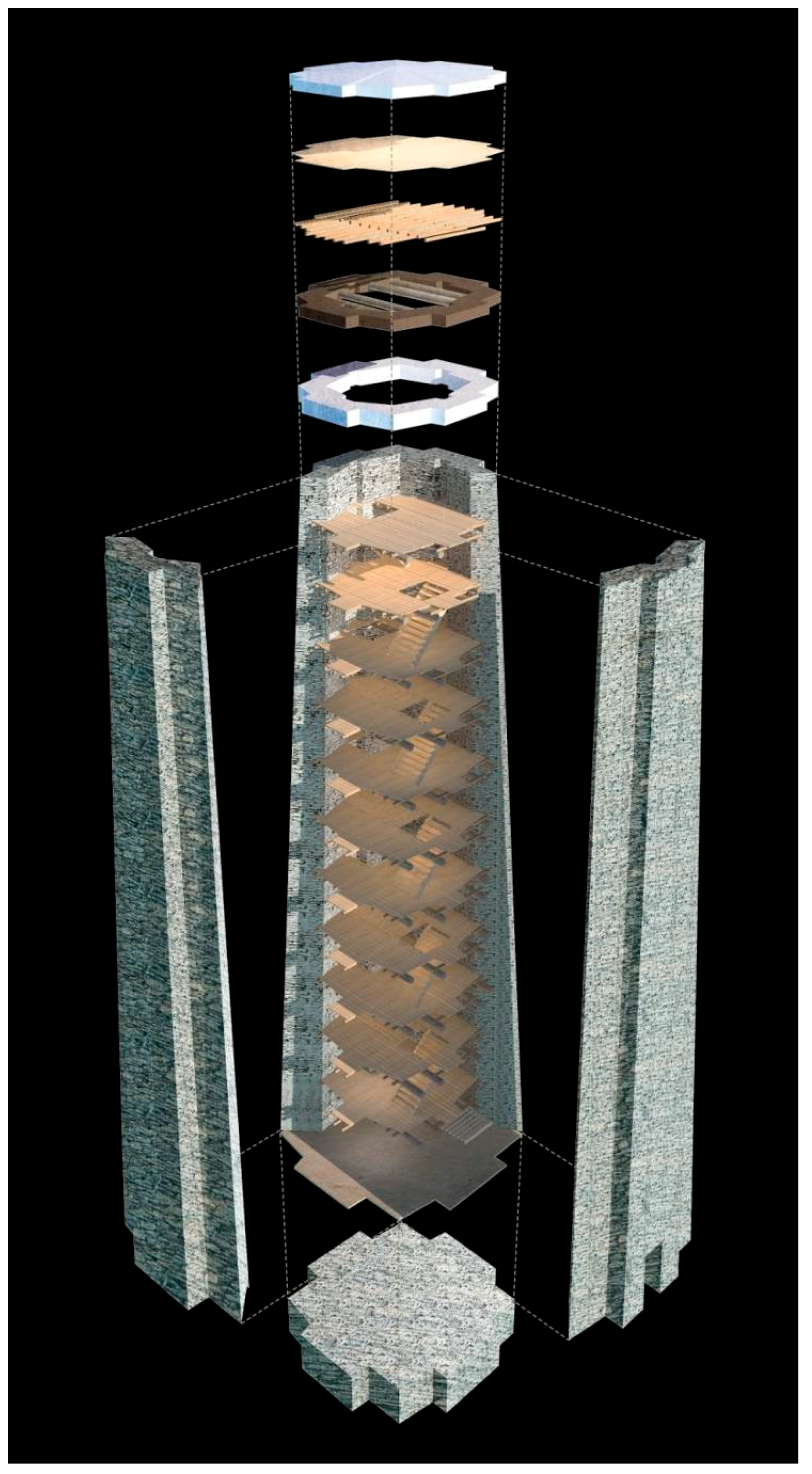
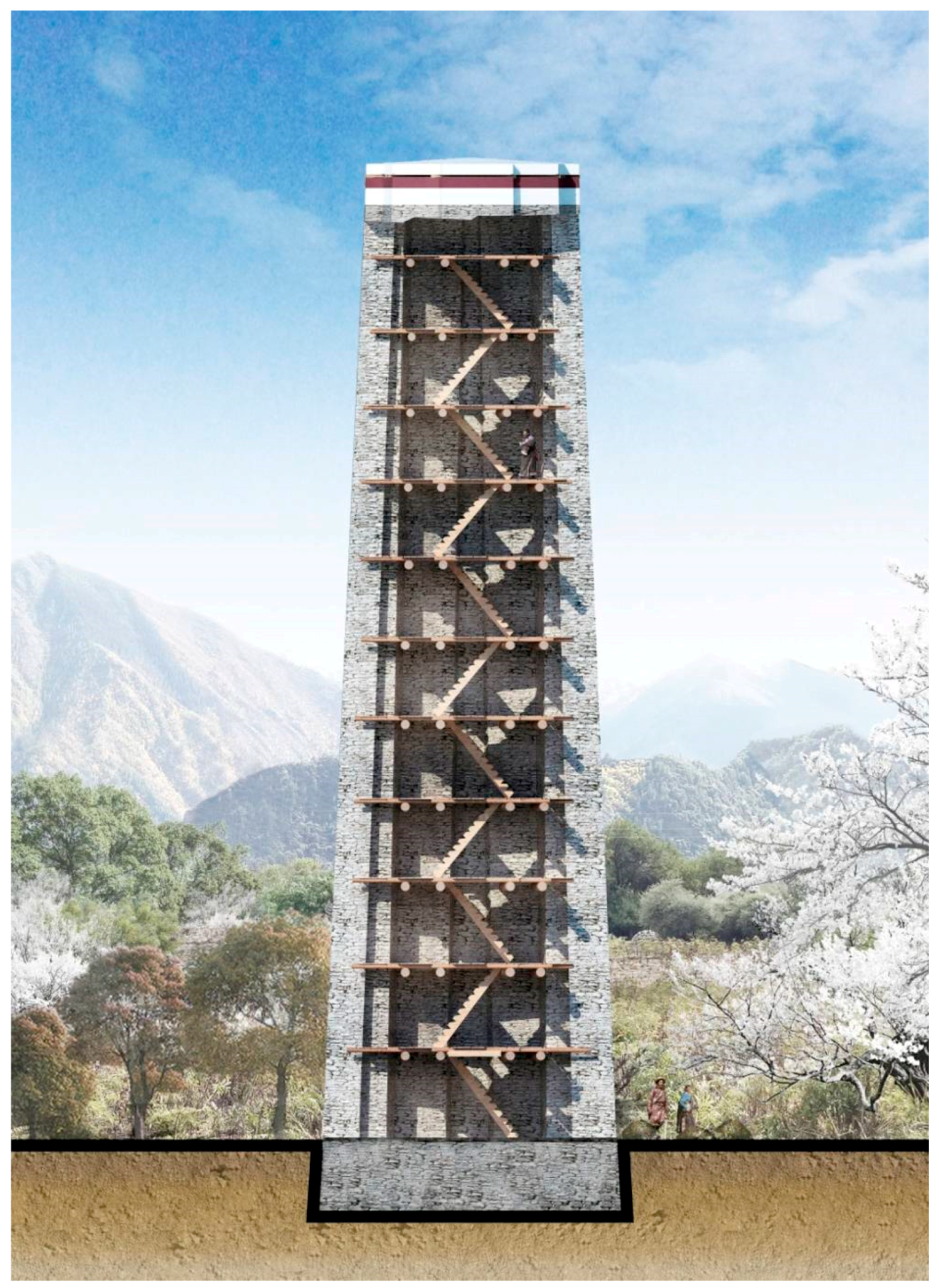
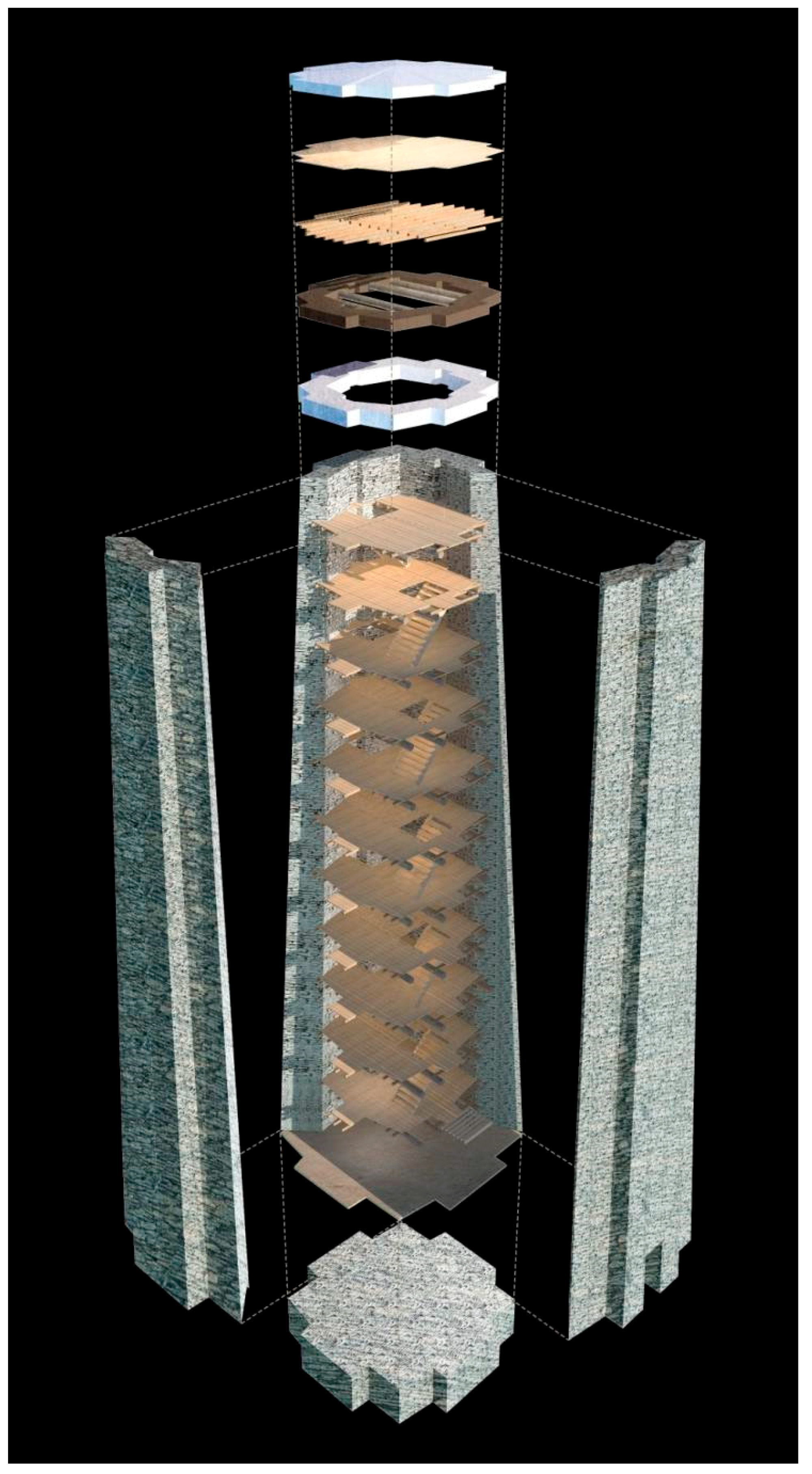
Internal Wood Construction Practices and Floor Distribution Rules
Style of the Roof of a Watchtower
3.2.7. Re-Establishment of the Restoration Model According to the Virtual Restoration Scheme
4. Results and Related Discussion
4.1. Current Status Model and Virtual Recovery Status Model
4.2. Discussion of the Results
4.2.1. Accuracy of the Status Model
4.2.2. Use of the Status Model and the Restoration Model
4.2.3. Necessity and Limitations of the Unmanned Aerial Vehicle Applied in Harsh Environments
5. Conclusions
- Virtual restoration based on 3D scanning technology can be used as a new method for the research and protection of towering ancient buildings; it can be used for reference to survey and research more than 1000 watchtowers in western China.
- The digital model is of great help to the sustainable use of cultural heritage, the popularization of education, and scientific research. Meanwhile, it can support the adoption of different virtual restoration schemes for the site and evaluation the site without damaging it.
- It is necessary and effective to adopt a method combining unmanned aerial vehicle oblique photogrammetry and ground 3D laser scanning technology in harsh environments, especially in a dangerous working environment. In the operation and control process of unmanned aerial vehicle control, special attention should be paid to the influence of airflow and temperature on the aircraft.
- The virtual restoration of ancient buildings needs to be judged by analyzing the remains of the components in the status model and combining the conditions of the same type of ancient buildings. Accurate restoration cannot be guaranteed without accurate measurement data.
- The status model generated by the surveying and mapping data can be used for display browsing and disaster recording, while the restoration model made by virtual repair based on the status model can be disassembled and used to guide repair work. It has been widely used in this manner.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Guidi, G.; Russo, M.; Angheleddu, D. 3D survey and virtual reconstruction of archeological sites. Digit. Appl. Archaeol. Cult. Herit. 2014, 1, 55–69. [Google Scholar] [CrossRef]
- Rüther, H.; Chazan, M.; Schroeder, R.; Neeser, R.; Held, C.; Walker, S.J.; Matmon, N.; Horwitz, L.K. Laser scanning for conservation and research of African cultural heritage sites: The case study of Wonderwerk Cave, South Africa. J. Archaeol. Sci. 2009, 36, 1847–1856. [Google Scholar] [CrossRef]
- Tapete, D.; Cigna, F. Appraisal of Opportunities and Perspectives for the Systematic Condition Assessment of Heritage Sites with Copernicus Sentinel-2 High-Resolution Multispectral Imagery. Remote Sens. 2018, 10, 561. [Google Scholar] [CrossRef]
- Hesse, R. Combining structure-from-motion with high- and intermediate-resolution satellite images to document threats to archaeological heritage in arid environments. J. Cult. Herit. 2015, 16, 192–201. [Google Scholar] [CrossRef]
- Yilmaz, H.M.; Yakar, M.; Gulec, S.A.; Dulgerler, O.N. Importance of digital close-range photogrammetry in documentation of cultural heritage. J. Cult. Herit. 2007, 8, 428–433. [Google Scholar] [CrossRef]
- Pieraccini, M.; Guidi, G.; Atzenni, C. 3D digitizing of cultural heritage. J. Cult. Herit. 2001, 2, 63–70. [Google Scholar] [CrossRef]
- Sun, Z.; Zhang, Y. Using Drones and 3D Modeling to Survey Tibetan Architectural Heritage: A Case Study with the Multi-Door Stupa. Sustainability 2018, 10, 2259. [Google Scholar] [CrossRef]
- Achille, C.; Adami, A.; Chiarini, S.; Cremonesi, S.; Fassi, F.; Fregonese, L.; Taffurelli, L. UAV-Based Photogrammetry and Integrated Technologies for Architectural Applications—Methodological Strategies for the After-Quake Survey of Vertical Structures in Mantua (Italy). Sensors 2015, 15, 15520–15539. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Murtiyoso, A.; Grussenmeyer, P. Documentation of heritage buildings using close-range UAV images: Dense matching issues, comparison and case studies. Photogramm. Rec. 2017, 32, 206–229. [Google Scholar] [CrossRef]
- Trizzino, R.; Caprioli, M.; Mazzone, F.; Scarano, M. Applications of UAV Photogrammetric Surveys to Natural Hazard Detection and Cultural Heritage Documentation. In Proceedings of the EGU General Assembly Conference Abstracts, Vienna, Austria, 23–28 April 2017; Volume 19, p. 18091. [Google Scholar]
- Sun, Z.; Cao, Y.K. Data processing workflows from low-cost digital survey to various applications: Three case studies of Chinese historic architecture. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, 40, 409–416. [Google Scholar] [CrossRef]
- Fregonese, L.; Barbieri, G.; Biolzi, L.; Bocciarelli, M.; Frigeri, A.; Taffurelli, L. Surveying and monitoring for vulnerability assessment of an ancient building. Sensors 2013, 13, 9747–9773. [Google Scholar] [CrossRef] [PubMed]
- Cihan Altuntas, Serhan Hezer and Süleyman Kırlı. Image based methods for surveying heritage of masonry arch bridge with the example of Dokuzunhan in Konya, Turkey. Sci. Cult. 2017, 3, 13–20. [Google Scholar]
- Salama, K.K.; Ali, M.F.; El-Shiekh, S. Reconstruction of monastery saint Jeremiah computer-aided design model. Sci. Cult. 2017, 3, 11–14. [Google Scholar]
- Al-Kheder, S.; Al-Shawabkeh, Y.; Haala, N. Developing a documentation system for desert palaces in Jordan using 3D laser scanning and digital photogrammetry. J. Archaeol. Sci. 2009, 36, 537–546. [Google Scholar] [CrossRef]
- Cai, H.; Zheng, S.; Li, Y.; Huang, L. An Exploration on Aseismic Capability of Quanzhou Zhenguo Pagoda. J. Build. Struct. 2007, 28, 84–89. [Google Scholar]
- Hu, Q.; Wang, S.; Fu, C.; Ai, M.; Yu, D.; Wang, W. Fine Surveying and 3D Modeling Approach for Wooden Ancient Architecture via Multiple Laser Scanner Integration. Remote Sens. 2016, 8, 270. [Google Scholar] [CrossRef]
- Pesci, A.; Casula, G.; Boschi, E. Laser scanning the Garisenda and Asinelli towers in Bologna (Italy): Detailed deformation patterns of two ancient leaning buildings. J. Cult. Herit. 2011, 12, 117–127. [Google Scholar] [CrossRef] [Green Version]
- Comes, R.; Neamțu, C.; Buna, Z.; Badiu, I.; Pupeză, P. Methodology to Create 3d Models for Augmented Reality Applications using Scanned Point Clouds. Mediterr. Archaeol. Archaeometry 2014, 14, 35–44. [Google Scholar]
- Tsiafaki, D.; Michailidou, N. Benefits and Problems through the Application of 3d Technologies in Archaeology: Recording, Visualisation, Representation and Reconstruction. Sci. Cult. 2015, 1, 37–45. [Google Scholar]
- Guarnieri, A.; Remondino, F.; Vettore, A. Digital photogrammetry and TLS data fusion applied to Cultural Heritage 3D modeling. In Proceedings of the ISPRS Commission V Symposium Image Engineering and Vision Metrology, Dresden, Germany, 25–27 September 2006. [Google Scholar]
- Fassi, F.; Fregonese, L.; Achermann, S.; De Troia, V. Comparison between laser scanning and automated 3D modelling techniques to reconstruct complex and extensive cultural heritage areas. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2013, 40, 73–80. [Google Scholar] [CrossRef]
- Xu, Z.; Wu, L.; Shen, Y.; Li, F.; Wang, Q.; Wang, R. Tridimensional Reconstruction Applied to Cultural Heritage with the Use of Camera-Equipped UAV and Terrestrial Laser Scanner. Remote Sens. 2014, 6, 10413–10434. [Google Scholar] [CrossRef] [Green Version]
- Zheng, D.; Yang, L. Collecting System of Building Surface Data with Three-D Laser Scanning Survey Aided with Digital Photogrammetry. Build. Sci. 2004, 4, 75–79. [Google Scholar]
- Domingo, I.; Villaverde, V.; López-Montalvo, E. Latest developments in rock art recording: Towards an integral documentation of Levantine rock art sites combining 2D and 3D recording techniques. J. Archaeol. Sci. 2013, 40, 1879–1889. [Google Scholar] [CrossRef]
- Hatzopoulos, J.N.; Stefanakis, D.; Georgopoulos, A.; Tapinaki, S.; Volonakis, P.; Liritzis, I. Use of various surveying technologies to 3d digital mapping and modelling of cultural heritage structures for maintenance and restoration purposes: The Tholos in Delphi, Greece. Mediterr. Archaeol. Archaeometry 2017, 17, 311–336. [Google Scholar]
- Dore, C.; Murphy, M.; McCarthy, S.; Brechin, F.; Casidy, C.; Dirix, E. Structural simulations and conservation analysis-Historic building information model (HBIM). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 351–357. [Google Scholar] [CrossRef]
- Oreni, D.; Brumana, R.; Della Torre, S.; Banfi, F.; Previtali, M. Survey turned into HBIM: The restoration and the work involved concerning the Basilica di Collemaggio after the earthquake (L’Aquila). ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, II-5, 267–273. [Google Scholar] [CrossRef]
- Chen, S.; Hu, Q.; Wang, S.; Yang, H. A Virtual Restoration Approach for Ancient Plank Road Using Mechanical Analysis with Precision 3D Data of Heritage Site. Remote Sens. 2016, 8, 828. [Google Scholar] [CrossRef]
- Chen, S.; Wang, S.; Li, C.; Hu, Q.; Yang, H. A Seismic Capacity Evaluation Approach for Architectural Heritage Using Finite Element Analysis of Three-Dimensional Model: A Case Study of the Limestone Hall in the Ming Dynasty. Remote Sens. 2018, 10, 963. [Google Scholar] [CrossRef]
- Rainieri, C.; Marra, A.; Rainieri, G.M.; Gargaro, D.; Pepe, M.; Fabbrocino, G. Integrated Non-Destructive Assessment of Relevant Structural Elements of an Italian Heritage Site: The Carthusian Monastery of Trisulti. J. Phys. Conf. Ser. 2015, 628, 012018. [Google Scholar] [CrossRef]
- Mezzino, D.; Chan, L.; Quintero, M.S.; Esponda, M.; Lee, S.; Min, A.; Pwint, M. Built Heritage Documentation and Management: An Integrated Conservation Approach in Bagan. In ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, IV-2/W2, Proceedings of the 26th International CIPA Symposium 2017, Ottawa, ON, Canada, 28 August–1 September 2017; Copernicus GmbH: Göttingen, Germany, 2017. [Google Scholar]
- Breitling, S.; Hoppe, S. Virtual Palaces, Part II: Lost Palaces and their Afterlife. Virtual Reconstr. Sci. Med. 2016, 3, 305S. [Google Scholar]
- Scharf, A.; Bräuning, A.; Kretschmer, W.; Wegner, B.; Darragon, F. 14C AMS Dating of Wooden Cores from Historic Buildings for Archaeological and Dendrochronological Research in High Asia. Radiocarbon 2013, 55, 1358–1365. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Watchtower Number | Number of Survived Floors | Number of Virtual Recovered Floors | Remaining Height (m) | Virtual Recovered Total Height (m) |
|---|---|---|---|---|
| 1 | 12 | 12 | 27.41 | 28.40 |
| 2 | 10 | 12 | 21.66 | 29.01 |
| 3 | 12 | 13 | 25.11 | 28.97 |
| 4 | 12 | 12 | 27.24 | 28.81 |
| 5 | 12 | 12 | 29.50 | 30.15 |
| 6 | 1 | 12 | 3.27 | 29.01 |
| 7 | 2 | 12 | 7.76 | 32.48 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Yang, H.; Wang, S.; Hu, Q. Surveying and Digital Restoration of Towering Architectural Heritage in Harsh Environments: a Case Study of the Millennium Ancient Watchtower in Tibet. Sustainability 2018, 10, 3138. https://doi.org/10.3390/su10093138
Chen S, Yang H, Wang S, Hu Q. Surveying and Digital Restoration of Towering Architectural Heritage in Harsh Environments: a Case Study of the Millennium Ancient Watchtower in Tibet. Sustainability. 2018; 10(9):3138. https://doi.org/10.3390/su10093138
Chicago/Turabian StyleChen, Siliang, Haozhong Yang, Shusheng Wang, and Qingwu Hu. 2018. "Surveying and Digital Restoration of Towering Architectural Heritage in Harsh Environments: a Case Study of the Millennium Ancient Watchtower in Tibet" Sustainability 10, no. 9: 3138. https://doi.org/10.3390/su10093138