State of the Art of Automated Buses

 , , add
Show full author list
, , add
Show full author list
Abstract
:1. Introduction
2. Motivation
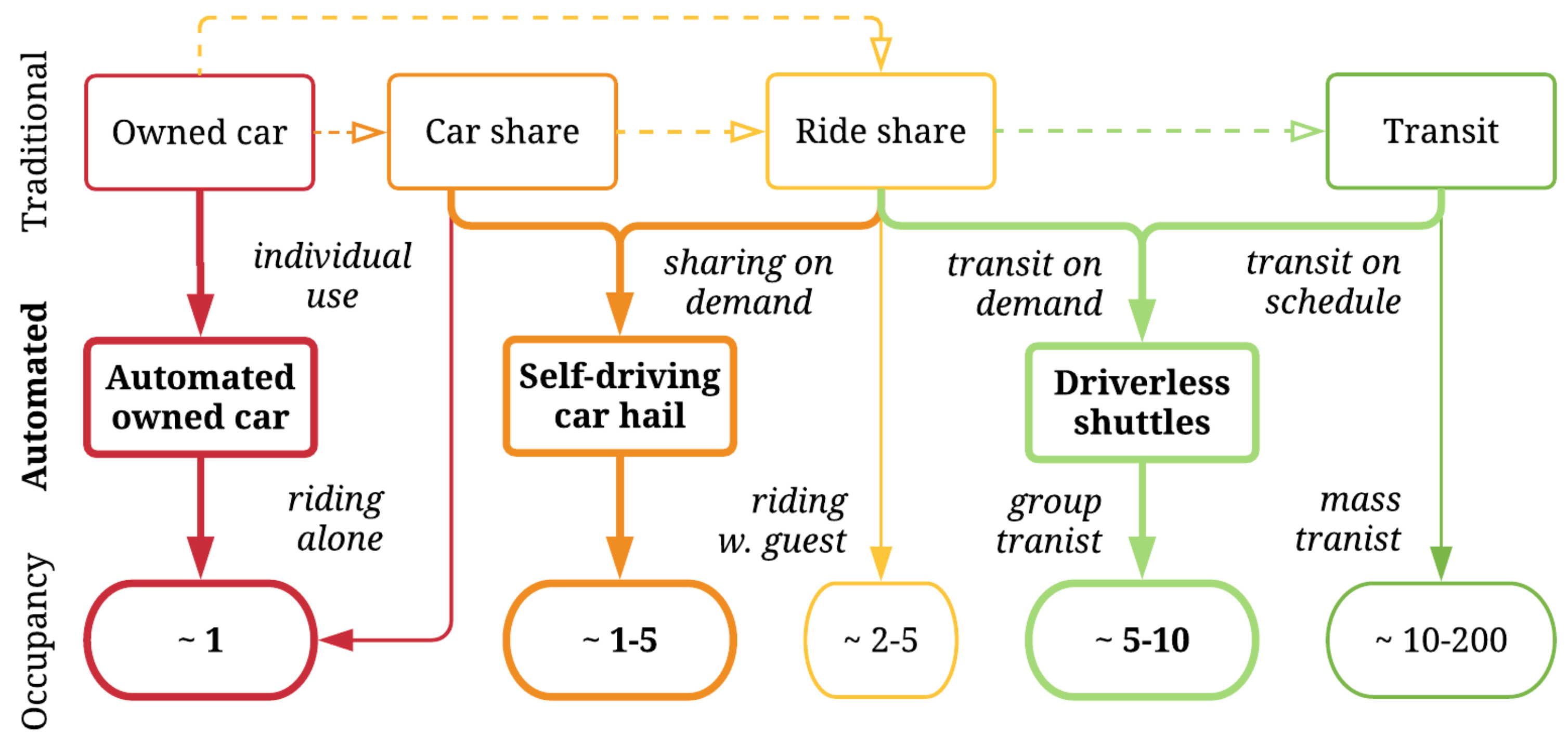
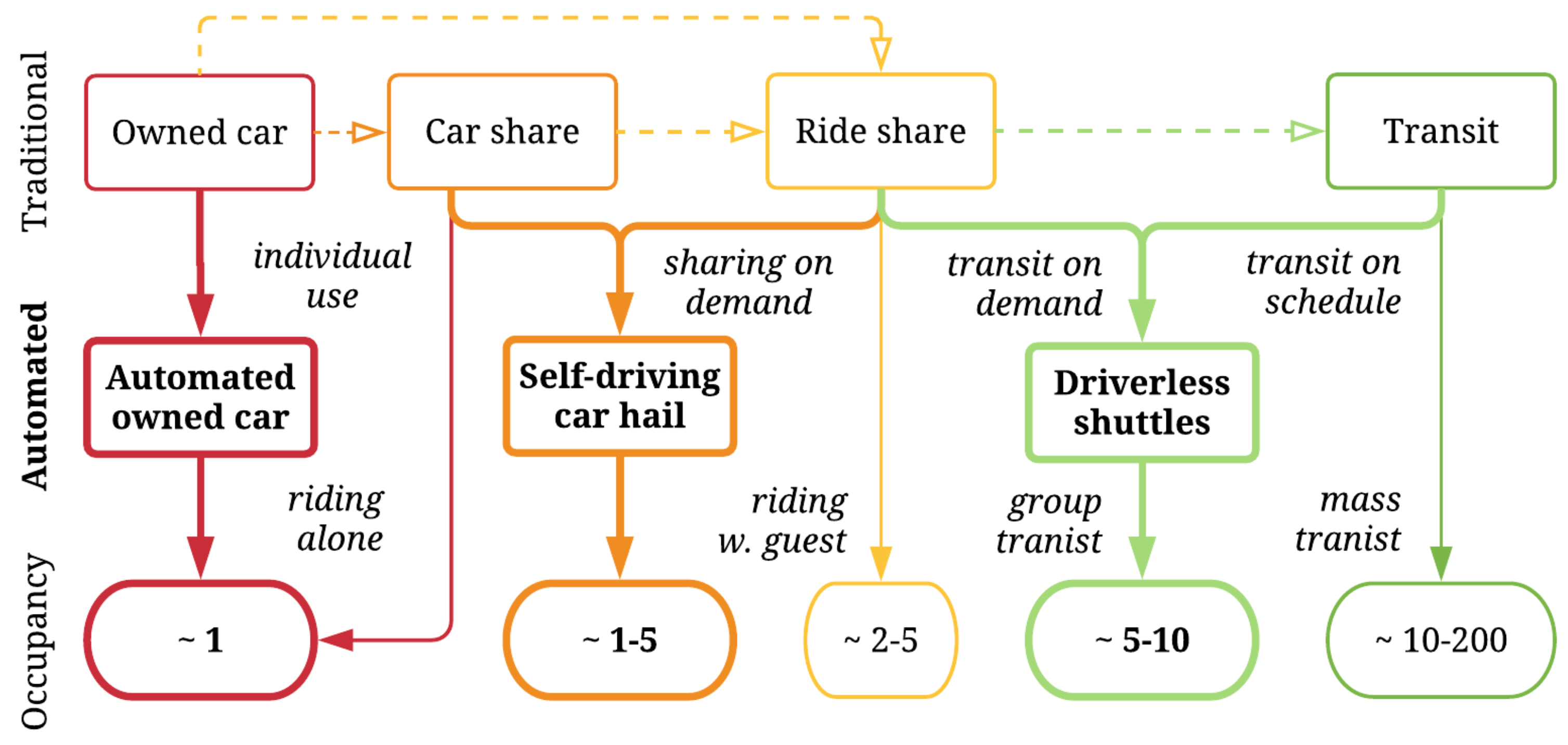
3. Variety of Automated Mobility
- due to the absence of a driver, the ridesharing/carpooling (Blablacar)/ride-hailing/sourcing (TNC (Transit Network Companies): e.g., Lyft, Uber, taxi) merges with car-sharing (yet, we can still share a ride in the shared car);
- mass transit, due to automation, may be more effective for travelling more frequently with less passengers, as well as being able to work in the on-demand mode; thus, it is a more populated version of driverless car share, a driverless shuttle (or minibus);
- the self-owned and self-ridden car does not change much; instead of a revolution, we will have an evolution of the traditional car, which already can break, park or keep the line autonomously.
4. Automated Bus Pilots
5. Technological Background
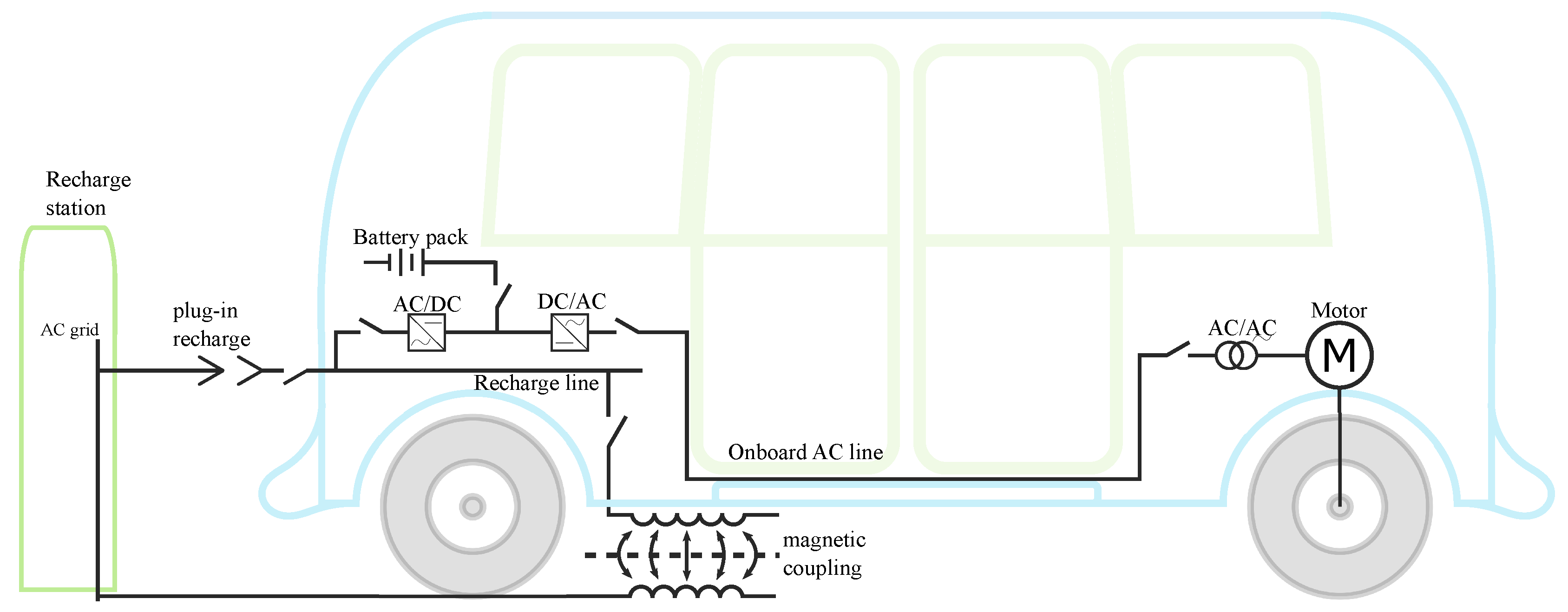
5.1. Electrification of Transportation
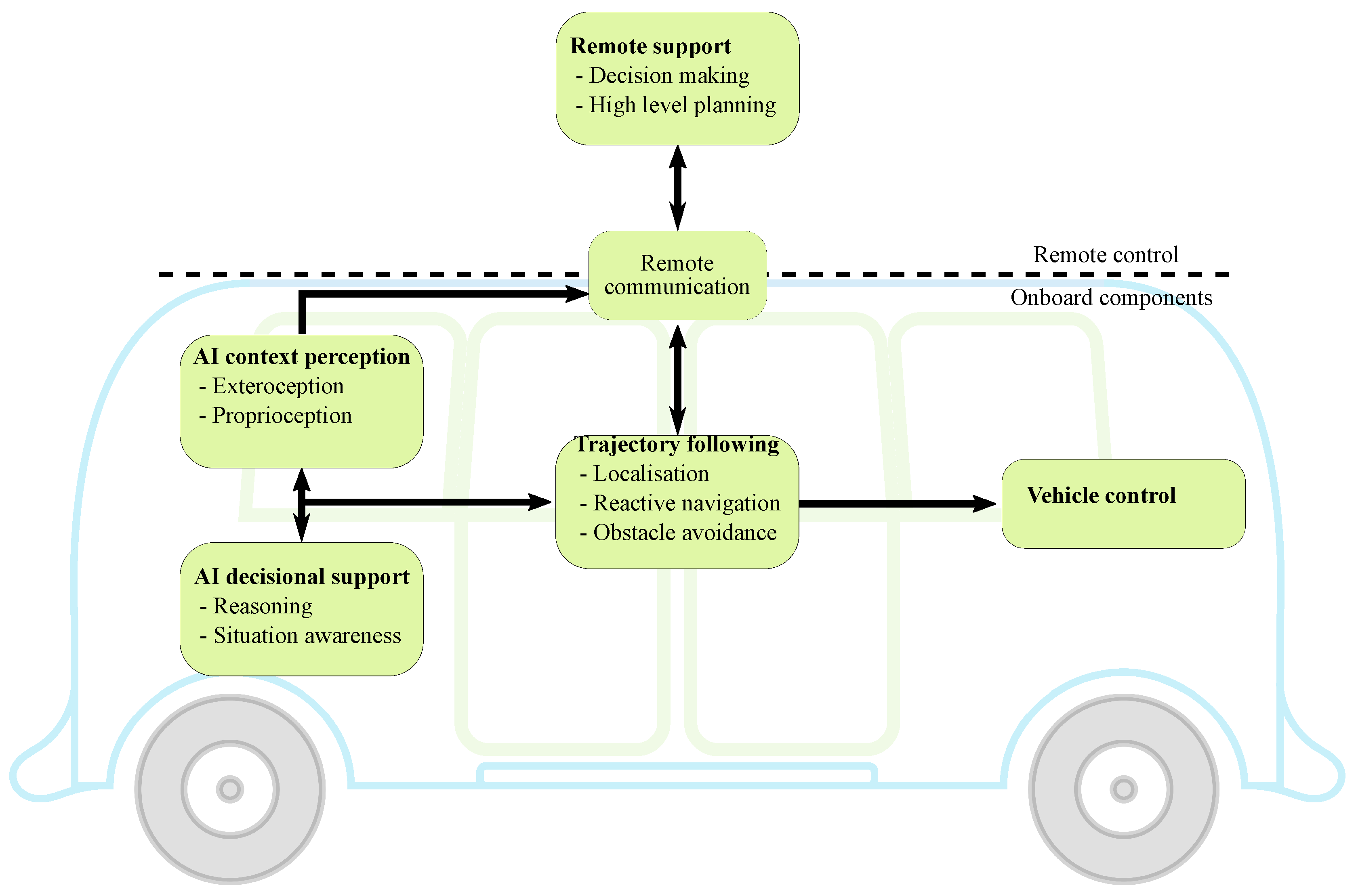
5.2. Autonomy in Urban Transportation
5.3. Sensors and Perception
5.3.1. Localization
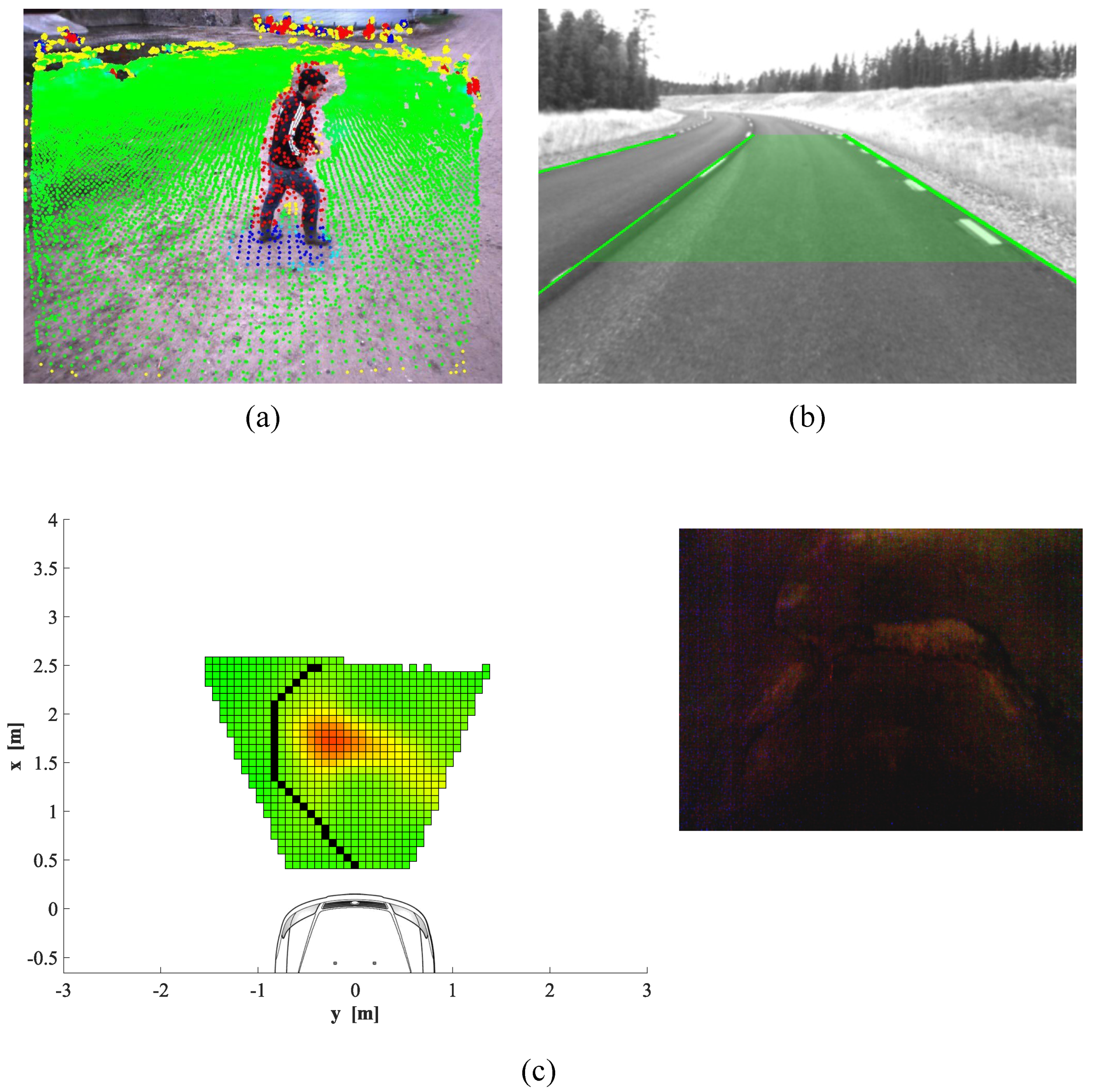
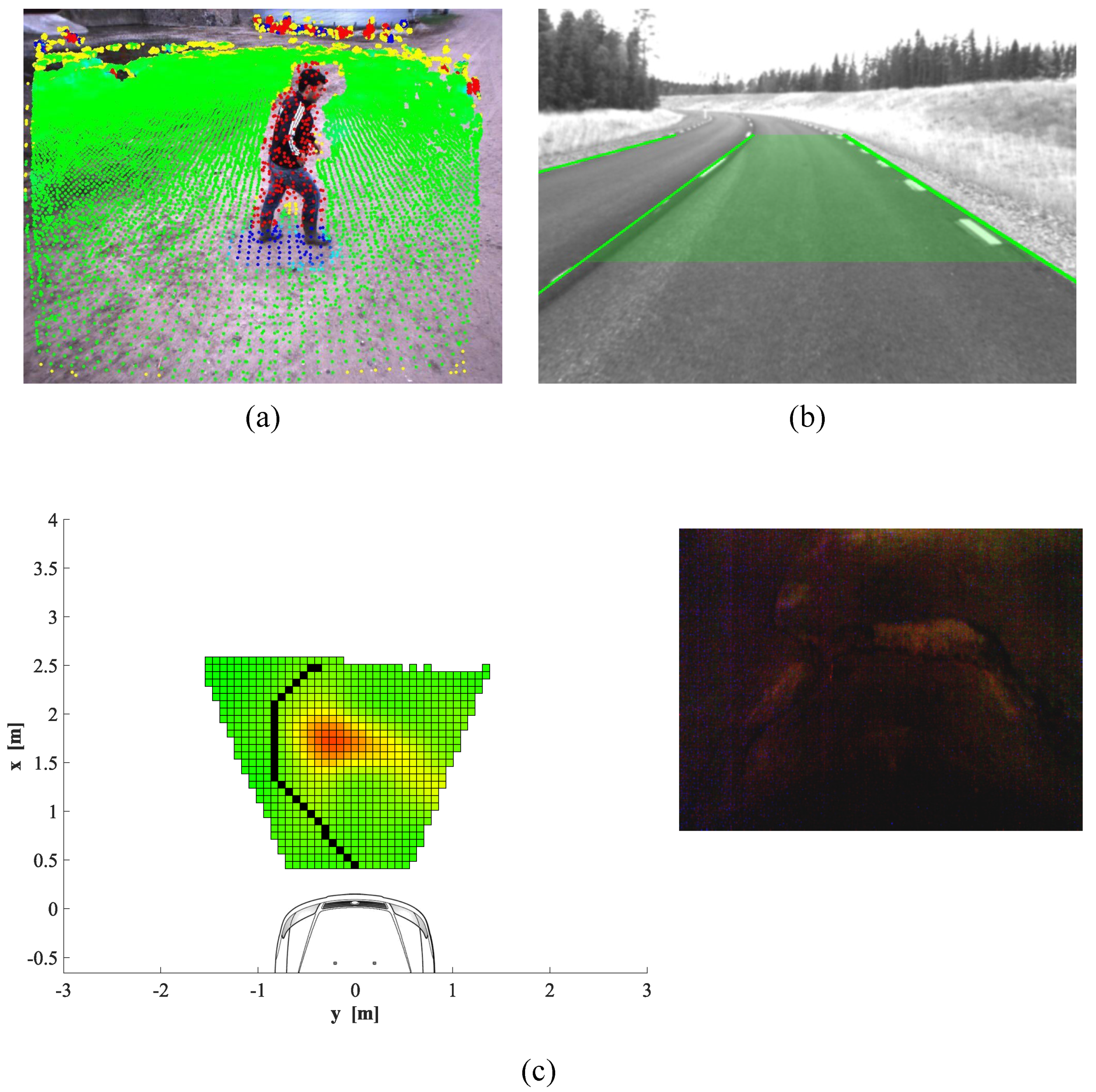
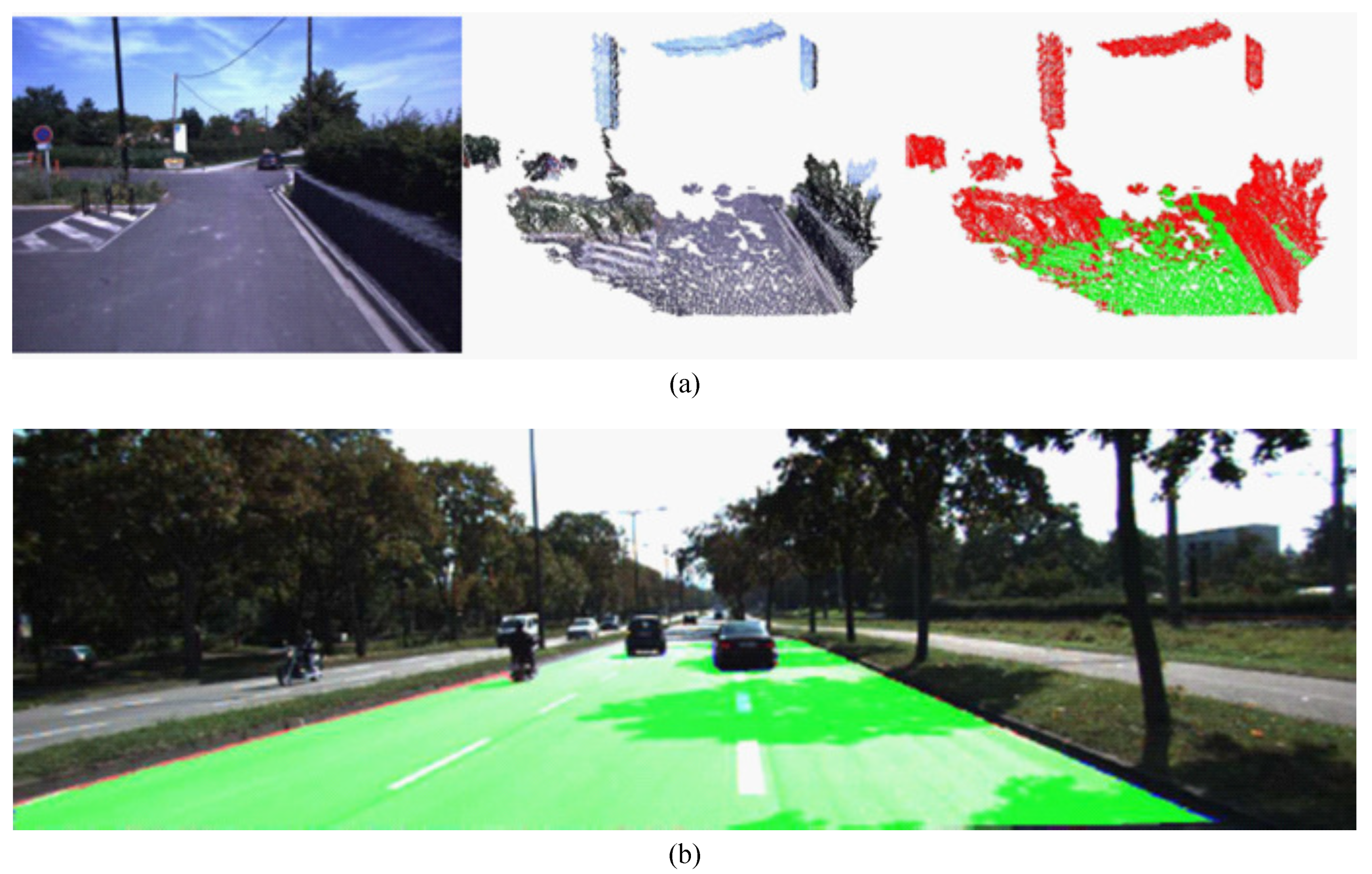
5.3.2. Scene Interpretation
5.4. Infrastructure Versus Vehicle-Based Automation
6. Route and Vehicle Specifications for Robot Buses
6.1. Route Specifications
- Location: Cities are likely to see the bus operating in a popular location, where the bus may bring visibility and promote the city.
- Real need for mobility: The robot bus can act as commuter among different modes of transportation, or for example in the internal traffic of campus areas and airports. The bus can carry one operator and eight passengers at a time on a public road (11 passengers in closed areas).
- Requirements for the operating area: For safety reasons, the speed limit should be 30–40 km/h, so the relative velocity would not grow dangerously high between the bus and other vehicles. If the route is shared with faster vehicles, they will need to be able to overtake the robot bus safely. The best situation would be a route free of on-street parking in the area, or if it could be completely banned. If there is on-street parking, the parking area should be clearly marked and the street needs to be wide enough (see Figure 13a). The robot bus has to be able to move freely along its route. All potential distractions e.g., wrongly parked vehicles disturb the operation of the robot bus, in which case the operator has to take control over the functioning of the bus. The lane must be at least four meters wide, because of the required safety distance. The bus may uncomfortably slow down, if the lane is narrower. The bus should not be programmed to run closer than 1.5 m from identified street-side parking areas or fixed objects like roadside vegetation. The bus recognizes these things as obstacles and slows down the pace and eventually stops if an object is too close (<0.3 m). The robot bus needs priority in intersections. Priority was carried out by stop signs and traffic lights in SOHJOA-project. Weather conditions such as in Figure 14a, featuring snow or heavy rain as well as the flying leaves from the trees can cause emergency stops for the robot bus as they are interpreted as an obstacle. These factors should be also noticed while planning the route.
- Does not disturb existing public transport: For example in Helsinki, the existing mobility needs are now quite well covered by Helsinki Regional Transport (HSL) buses, trams and metros. Robot buses move considerably slower than existing motorized modes of transport so they can hinder other traffic.
- The use of pedestrian and bicycle lanes: While planning new routes, it has been discovered that in some cases the use of light traffic lanes could create new opportunities. For example, a route from Helsinki Koivusaari metro station to Hanasaari Cultural Center, where the route would go partly on a pedestrian lane. Another example is a pilot at Helsinki-Vantaa airport, where the route was almost entirely on a pedestrian lane. The operating speed of the robot bus used in pilots is max 12 km/h. Because of that, the bus is more suitable among pedestrians and cyclists. However, the bus is a size of a minivan, and it takes a significant space of the lane. As a result, it may cause problems with pedestrians and cyclists. Driving the robot bus on a public road requires test plates which have to be granted by the local transportation authority, Finnish Transport Safety Agency (Trafi) for Finland. If the bus operates in a pedestrian road, the road must be marked as a yard street or as another mobility mode which allows driving also for other vehicles. The City of Helsinki has not granted any special permissions to the robot bus, so it is not allowed to drive on pedestrian lanes. Cities should think about using the pedestrian and bicycle lanes in terms of what is best suited for the city’s own strategy. It should be noted that the use of pedestrian and bicycle traffic lanes can bring new possibilities for routes. However, the bus adjusts its speed to objects moving in front of it, this can make the bus slow down too often on the busy pedestrian lanes.
- No traffic lights on the route: EZ10 cannot communicate with the traffic lights, so the traffic lights complicate the route increasing the necessary number of specific arrangements.
- Storage and charging: The bus should be charged where the temperature is above zero Celsius. Charging can be carried out at normal Schuko socket and the fuse must be at least 16 A. The door to storage hall must be at least 2.5 m wide and 2.8 m high. Social facilities for the operators should be located nearby.
- Localization of the bus: Fixed localisation points at least every 50 m along the route (see Figure 13b).
- Stable environment, no construction sites along the path: The map has to be updated, via a path recording procedure, in case of strong environmental changes during the pilot. GNSS, sufficient satellite coverage. Satellite connection is interrupted in tunnels, also tall buildings and trees next to the route may weaken or generate noise in the signal (see Figure 14b).
6.2. Vehicle Specification
7. Current State of the Legal Framework in EU and BSR
7.1. Germany
7.1.1. Law of Vehicle Approval
- An official application from the vehicle keeper.
- Motor vehicle liability insurance coverage.
- An operating license.
- At the international level, UNECE rules require automated vehicles to be designed such that the driver may, at any time and by deliberate action, override the automated driving function (UNECE Regulation No. 79, 5.1.6).
- The Vienna Convention on Road Traffic (Art. 8) requires every moving vehicle to have a driver (see the AUTOCITSproject, Report on international regulations and autonomous vehicles, available at: https://www.autocits.eu/sites/autocits/files/AUTOCITS%20Regulation%20study_ABSTRACT.pdf, for an overview of which countries are linked to the Vienna convention and the implications of the respective national regulations on testing procedures with autonomous vehicles).
- The automatic functions of the automated car must comply with regulations on the driver’s behaviour.
- Technical regulations requiring cars to have seat belts, a steering wheel, mechanical breaks, and automobile mirrors may present additional hurdles.
- Geographic limitations.
- Time limits.
- Provisions under which the license can be invalidated
- The onboard vehicle operator.
- Operational safety.
- Consequences of an accident.
- Transport of persons.
- Logbook or other types of documentation.
- A passenger safety briefing.
7.1.2. Public Transport Law
- Persons are being transported.
- A fee is charged.
- Any other financial compensation is provided.
- Transport takes place on a regular basis.
- Line-based traffic is a transport that connects a pre-determined starting and end point on a regular basis and allows passengers to board and disembark at certain stops. It does not require a timetable with specific departure and arrival times or the establishment of intermediate stops.
- Occasional traffic is a transport by taxi, rental car, or rental bus. Taxi transport refers to the transportation of passengers to places of their own choice by cars that are kept ready for service at officially designated spots. Transport by rental car or bus refers to transportation in vehicles rented by passengers for this purpose. The route and destination are determined entirely by the passengers, and the rental service responds to transit requests at the corporate office or the owner’s residence. The vehicle rental must include the services of a driver; taxis and rental cars cannot be driven by the passengers themselves.
- If a mode of transport does not fulfil all requirements for line-based or occasional traffic, authorization can be granted under the terms of the permit for the mode of transport to which it is most similar.
- For tests of new modes of transport, a special permit can be issued for a maximum period of four years.
- Both types of special permits are granted only if operation of the authorized vehicle is not contrary to the public interest.
7.1.3. Law of Driving Licenses
7.1.4. Criminal Law
- Vehicle owner or holder.
- Manufacturer and its employees.
- Provider of the necessary data infrastructure.
- Officials at the competent authority for vehicle permits.
- Vehicle operator (if a third party outside the vehicle is harmed).
- Deficiencies in the vehicle’s technology (software or hardware).
- Insufficient maintenance.
- Insufficient safety briefing of the vehicle operator.
7.1.5. Data Protection and Privacy Law
7.2. Sweden
7.2.1. Law of Vehicle Approval
- TFdoes not stipulate a requirement that a person must drive the vehicle but there is an underlying assumption that there is a person directing the vehicle.
- On the international level UNECE rules require autonomous vehicles to be designed such that the driver may, at any time and by deliberate action, override the automated driving function (UNECE rules No. 79, 5.1.6)
- The Vienna Convention on Road traffic (Art. 8) foresees that every moving vehicle shall have a driver
7.2.2. Law of Driving Licenses
7.2.3. Data Protection and Privacy Law
8. Issues Regarding Civil Liability in Automated Driving Vehicles
8.1. Germany
8.2. Sweden
9. Safety and Current Standardization Level
9.1. Safety Standards
9.2. Current Standardization Level
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Relevant Regulations
Appendix A.1. Finland
| Title (English) | Title (Finnish) | Abbreviation |
| Civil Code | Suomessa siviilioikeudella tarkoitetaan yksityisoikeutta joka jaetaan yleiseen ja erityiseen yksityisoikeuteen. Yleinen yksityisoikeus jakaantuu henkilö-, varallisuus-, perhe- ja jäämistöoikeuteen | |
| Federal Data Protection Act | Tietosuojalaki (uusi; täydentää tietosuoja-asetusta) | HE 9/2018 |
| DIRECTIVE 2007/46/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 5 September 2007 establishing a framework for the approval of motor vehicles and their trailers, and of systems, components and separate technical units intended for such vehicles | Euroopan parlamentin ja neuvoston direktiivi 2007/46/EY, annettu 5 päivänä syyskuuta 2007, puitteiden luomisesta moottoriajoneuvojen ja niiden perävaunujen sekä tällaisiin ajoneuvoihin tarkoitettujen järjestelmien, osien ja erillisten teknisten yksiköiden hyväksymiselle (Puitedirektiivi) | Directive 2007/46/EC |
| Regulation on the EC approval of motor vehicles and their trailers, as well as systems, components and separate technical units for such vehicles. | Asetus ajoneuvojen hyväksynnästä | 2002/1244 |
| Driving Licence Act | Ajokorttilaki | 2011/386 |
| Vehicle Admission Ordinance | - | - |
| REGULATION (EU) 2016/679 OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data | EUROOPAN PARLAMENTIN JA NEUVOSTON ASETUS (EU) 2016/679, annettu 27 päivänä huhtikuuta 2016, luonnollisten henkilöiden suojelusta henkilötietojen käsittelyssä sekä näiden tietojen vapaasta liikkuvuudesta ja direktiivin 95/46/EY kumoamisesta (yleinen tietosuoja-asetus) | GDPR |
| Finnish Constitution | Perustuslaki | 1999/731 |
| Passenger Transportation Act. | Laki liikenteen palveluista | 2017/320 |
| Insurance Law | Liikennevakuutuslaki | 2016/460 |
| Product liability law | Tuotevastuulaki | 1990/694 |
| Criminal code | Rikoslaki | 1889/39 |
| Road Traffic Act | Tieliikennelaki | 1981/267 |
| Vehicles Act | Ajoneuvolaki | 2002/1090 |
| Road Traffic Registration Regulation | Asetus ajoneuvojen rekisteröinnistä | 2007/893 |
| Decree on the Use of Vehicles on the Road | Asetus ajoneuvojen käytöstä tiellä | 1992/1257 |
| Car Tax Act | Autoverolaki | 1994/1482 |
| Vehicle Tax Act | Ajoneuvoverolaki | 2003/1481 |
| UNECE-UN Vehicle Regulations-1958 Agreement | - | UNECE rules |
| Vienna Convention on Road Traffic | - | - |
| Insurance Contract Act | - | - |
Appendix A.2. Germany
| Title (English) | Title (German) | Abbreviation |
| Civil Code | Bürgerliches Gesetzbuch | BGB |
| Federal Data Protection Act | Bundesdatenschutzgesetz | BDSG |
| DIRECTIVE 2007/46/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 5 September 2007 establishing a framework for the approval of motor vehicles and their trailers, and of systems, components and separate technical units intended for such vehicles | - | Directive 2007/46/EC |
| Regulation on the EC approval of motor vehicles and their trailers, as well as systems, components and separate technical units for such vehicles | Verordnung über die EG-Genehmigung für Kraftfahrzeuge und ihre Anhänger sowie für Systeme, Bauteile und selbstständige technische Einheiten für diese Fahrzeuge (EG-Fahrzeuggenehmigungsverordnung) | EG-FGV |
| Driving License Regulations | Verordnung über die Zulassung von Personen zum Straßenverkehr (Fahrerlaubnis-Verordnung) | FeV |
| Ordinance on the exemption of specific forms of transport from the norms of the Passenger Transportation Act | Verordnung über die Befreiung bestimmter Beförderungsfälle von den Vorschriften des Personenbeförderungsgesetzes | FrStllgV |
| Vehicle Admission Ordinance | Verordnung über die Zulassung von Fahrzeugen zum Straßenverkehr | FZV |
| REGULATION (EU) 2016/679 OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data (EU General Data Protection Regulation) | Datenschutz-Grundverordnung | GDPR |
| Basic Law for the Federal Republic of Germany (German constitution) | Grundgesetz | GG |
| Passenger Transportation Act | Personenbeförderungsgesetz | PBefG |
| Compulsory Insurance Law | Pflichtversicherungsgesetz | PflVG |
| Product Liability Act | Produkthaftungsgesetz | ProdHaftG |
| Criminal Code | Strafgesetzbuch | StGB |
| Road Traffic Act | Straßenverkehrsgesetz | StVG |
| Road Traffic Regulations | Straßenverkehrsordnung | StVO |
| Road Traffic Licensing Regulation | Straßenverkehrs-Zulassungs-Ordnung | StVZO |
| Agreement concerning the adoption of uniform technical prescriptions for wheeled vehicles, equipment and parts which can be fitted and/or be used on wheeled vehicles and the conditions for reciprocal recognition of approvals granted on the basis of these prescriptions (1958 Agreement) | - | UN(ECE) Regulations |
| Vienna Convention on Road Traffic | Wiener Übereinkommen über den Straßenverkehr | - |
| Insurance Contract Act | Versicherungsvertragsgesetz | VVG |
Appendix A.3. Poland
Appendix A.4. Sweden
| Title (English) | Title (Swedish) | Abbreviation |
| Instrument of Government (Swedish constitution) | Regeringsformen | RF |
| Personal Data Act | Personuppgiftslag 1998:204 | PUL |
| DIRECTIVE 2007/46/EC OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 5 September 2007 establishing a framework for the approval of motor vehicles and their trailers, and of systems, components and separate technical units intended for such vehicles | - | Directive 2007/46/EC |
| The Swedish Road Traffic Ordinance | Trafikförordning (1998:1276) | TF |
| Vehicle Act* | Fordonslag (2002:574) | FordL |
| Vehicle Ordinance* | Fordonsförordning (2009:211) | FordF |
| Ordinance on autonomous vehicle trials | Förordning (2017:309) om försöksverksamhet med självkörande fordon | SjälvKörF |
| REGULATION (EU) 2016/679 OF THE EUROPEAN PARLIAMENT AND OF THE COUNCIL of 27 April 2016 on the protection of natural persons with regard to the processing of personal data and on the free movement of such data (General Data Protection Regulation) | Dataskyddsförordningen | GDPR |
| The Public Transportation Act | Lag (2010:1065) om kollektivtrafik | KolltrL |
| Product liability law | Produktansvarslag (1992:18) | PAL |
| Product safety law | Produktsäkerhetslag (2004:451) | PSL |
| Penal code | Brottsbalk (1962:700) | BrB |
| Motor Traffic Damage Act | Trafikskadelag (1975:1410) | TSL |
| Road Traffic Registration Regulation | Lag (2001:558) om vägtrafikregister | VägtrRegL |
| UNECE—UN Vehicle Regulations—1958 Agreement | - | UNECE rules |
| Vienna Convention on Road traffic | ||
| Insurance Contract Act | Försäkringsavtalslag (2005:104) | FörsAvtL |
| Road Traffic Offences Act | Trafikbrottslagen (1951:649) | TrBrL |
| Driving License Act | Körkortslagen (1998:488) | KörkL |
| Driving License Ordinance | Körkortsförordning (1998:980) | KörkF |
| Road Traffic Definitions Act* | Lag (2001:559) om vägtrafikdefinitioner | VägDefL |
| Road Traffic Definitions Ordinance* | Förordningen (2001:651) om vägtrafikdefinitioner | VägDefF |
| Road Signs Ordinance | Vägmärkesförordning (2007:90) | VägMärkF |
| Roads Act | Väglag (1971:948) | VL |
| European Parliament and Council Directive 2006/26/EC of 20 December 2006, the Third Directive on Driving Licenses | - | Directive 2006/26/EC |
| Camera Surveillance Act | Kameraövervakningslag (2013:460) | KamÖvL |
| (Ordinance on electronic announcement of certain road traffic regulations) | (1971:948) | |
| (Act with special rules concerning street cleaning and signage) | (1998:814) | |
| (the Planning and Building Act) | (2010:900) |
References
- Google. Google Self-Driving Car Testing Report on Disengagements of Autonomous Mode; Technical Report, 2015; Google: Mountain View, CA, USA, December 2015. [Google Scholar]
- Decker, B.L. National Transportation Safety Board (NTSB) Preliminary Report Highway: HWY18MH010. Technical Report; May 2018. Available online: https://www.ntsb.gov/investigations/AccidentReports/Reports/HWY18MH010-prelim.pdf. (accessed on 24 July 2018).
- Smolnicki, P. Connected & Automated Urban Mobility, Zombie Cars and Kitchen Knives: Will Autonomous Automobiles, Self-Driving Car-Sharing and Ride-Hailing, and Driverless Shuttles Harm Cities? In Proceedings of the 53rd ISOCARP/OAPA Congress Automated Mobility, Portland, OR, USA, 24–27 October 2017; 2017; pp. 1–17. [Google Scholar]
- United Nations Department of Economic and Social Affairs (UNDESA). World Urbanization Prospects, the 2011 Revision; Technical Report; UNDESA: New York, NY, USA, 2014.
- Eurostat. Population Structure and Ageing; Technical Report, 2018; Eurostat: Luxembourg, 2018. [Google Scholar]
- EU Commission. A European Strategy for Low-Emission Mobility; Technical Report 2016; EU Commission: Brussels, Belgium, 2016.
- European Environmental Agency. Total Greenhouse Gas Emission Trends and Projections; Technical Report, 2017; European Environmental Agency: Copenhagen, Denmark, 2017. [Google Scholar]
- European Union. EU Transport in Figures, 2017; Publications Office of the European Union: Luxembourg, 2017. [Google Scholar]
- European Commision. Directorate-General for Research and Innovation. In Electrification of the Transport System—Studies and Reports; European Commision: Brussels, Belgium, 2017. [Google Scholar]
- Hörl, S.; Ciari, F.; Axhausen, K.W. Recent perspectives on the impact of autonomous vehicles. Arbeitsberichte Verkehrs-und Raumplanung 2016, 1216. [Google Scholar] [CrossRef]
- U.S. Department of Transportation; National Highway Traffic Safety Administration. National Motor Vehicle Crash Causation Survey: Report to Congress; National Highway Traffic Safety Administration: Washington, DC, USA, 2008.
- Smolnicki, P.M.; Sołtys, J. Driverless mobility: The impact on metropolitan spatial structures. Procedia Eng. 2016, 161, 2184–2190. [Google Scholar] [CrossRef]
- Collarte, N. The Woonerf Concept, Rethinking a Residential Street in Somerville. Master’s Thesis, Tufts University, Boston, MA, USA, December 2012. [Google Scholar]
- Bloomberg Aspen Initiative on Cities and Autonomous Vehicles. Technical Report. Available online: https://avsincities.bloomberg.org/ (accessed on 10 May 2018).
- Vayá, M.G.; Andersson, G. Centralized and decentralized approaches to smart charging of plug-in Vehicles. In Proceedings of the 2012 IEEE Power and Energy Society General Meeting, San Diego, CA, USA, 22–26 July 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Sachan, S.; Kishor, N. Optimal location for centralized charging of electric vehicle in distribution network. In Proceedings of the 18th Mediterranean Electrotechnical Conference (MELECON), Lemesos, Cyprus, 18–20 April 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Sandén, B.; Wallgren, P. Systems Perspectives on Electromobility; Chalmers University of Technology: Goteborg, Sweden, 2014. [Google Scholar]
- Lencwe, M.; Chowdhury, S.D.; Olwal, T. Performance studies of lead acid batteries for transport vehicles. In Proceedings of the 2017 IEEE PES PowerAfrica, Accra, Ghana, 27–30 June 2017; pp. 528–532. [Google Scholar]
- Nitta, N.; Wu, F.; Lee, J.T.; Yushin, G. Li-ion battery materials: Present and future. Mater. Today 2015, 18, 252–264. [Google Scholar] [CrossRef]
- Badwal, S.P.; Giddey, S.S.; Munnings, C.; Bhatt, A.I.; Hollenkamp, A.F. Emerging electrochemical energy conversion and storage technologies. Front. Chem. 2014, 2, 79. [Google Scholar] [CrossRef] [PubMed]
- Zheng, G.; Lee, S.W.; Liang, Z.; Lee, H.W.; Yan, K.; Yao, H.; Wang, H.; Li, W.; Chu, S.; Cui, Y. Interconnected hollow carbon nanospheres for stable lithium metal anodes. Nat. Nanotechnol. 2014, 9, 618. [Google Scholar] [CrossRef] [PubMed]
- Kaskhedikar, N.A.; Maier, J. Lithium storage in carbon nanostructures. Adv. Mater. 2009, 21, 2664–2680. [Google Scholar] [CrossRef]
- Suresh, S.; Wu, Z.P.; Bartolucci, S.F.; Basu, S.; Mukherjee, R.; Gupta, T.; Hundekar, P.; Shi, Y.; Lu, T.M.; Koratkar, N. Protecting silicon film anodes in lithium-ion batteries using an atomically thin graphene drape. ACS Nano 2017, 11, 5051–5061. [Google Scholar] [CrossRef] [PubMed]
- National Research Council. The Role of the Chemical Sciences in Finding Alternatives to Critical Resources: A Workshop Summary; National Academies Press: Washington, DC, USA, 2012. [Google Scholar]
- Eskandarian, A. Handbook of Intelligent Vehicles; Springer: Berlin/Heidelberg, Germany, 2012; Volume 2. [Google Scholar]
- Bojarski, M.; Del Testa, D.; Dworakowski, D.; Firner, B.; Flepp, B.; Goyal, P.; Jackel, L.D.; Monfort, M.; Muller, U.; Zhang, J.; et al. End to end learning for self-driving cars. arXiv, 2016; arXiv:1604.07316. [Google Scholar]
- Kwakernaak, H.; Sivan, R. Linear Optimal Control Systems; Wiley-Interscience: New York, NY, USA, 1972; Volume 1. [Google Scholar]
- Naidu, D.S. Optimal Control Systems; CRC Press: Boca Raton, FL, USA, 2002. [Google Scholar]
- Vishnukumar, H.J.; Butting, B.; Müller, C.; Sax, E. Machine learning and deep neural network—Artificial intelligence core for lab and real-world test and validation for ADAS and autonomous vehicles: AI for efficient and quality test and validation. In Proceedings of the IEEE Intelligent Systems Conference (IntelliSys), London, UK, 7–8 September 2017; pp. 714–721. [Google Scholar]
- Nilsson, N.J. Principles of Artificial Intelligence; Morgan Kaufmann: Berlington, MA, USA, 1980. [Google Scholar]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Collins, J. Global Positioning System: Theory and Practice; Springer: Berling, Germany, 1997. [Google Scholar]
- Decker, B.L. World Geodetic System 1984; Technical Report, DTIC Document; Defense Mapping Agency Aerospace Center: St Louis, MO, USA, April 1986. [Google Scholar]
- Seeber, G. Satellite Geodesy: Foundations, Methods, and Applications; Walter de Gruyter: Berlin, Germany, 2003. [Google Scholar]
- Ansari, K.; Wang, C.; Wang, L.; Feng, Y. Vehicle-to-vehicle real-time relative positioning using 5.9 GHz DSRC Media. In Proceedings of the IEEE 78th Vehicular Technology Conference (VTC Fall), Las Vegas, ND, USA, 2–5 September 2013; pp. 1–7. [Google Scholar] [CrossRef]
- Cui, Y.; Ge, S.S. Autonomous vehicle positioning with GPS in urban canyon environments. IEEE Trans. Robot. Autom. 2003, 19, 15–25. [Google Scholar]
- Caron, F.; Duflos, E.; Pomorski, D.; Vanheeghe, P. GPS/IMU data fusion using multisensor Kalman filtering: Introduction of contextual aspects. Inf. Fusion 2006, 7, 221–230. [Google Scholar] [CrossRef]
- Zhang, P.; Gu, J.; Milios, E.E.; Huynh, P. Navigation with IMU/GPS/digital compass with unscented Kalman filter. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Fails, ON, Canada, 29 July–1 August 2005; Volume 3, pp. 1497–1502. [Google Scholar]
- Leonard, J.; Durrant-Whyte, H.; Cox, I.J. Dynamic map building for autonomous mobile robot. In Proceedings of the IEEE International Workshop on Intelligent Robots and Systems, Towards a New Frontier of Applications, Ibaraki, Japan, 3–6 July 1990; IEEE: Piscataway, NJ, USA, 1990; pp. 89–96. [Google Scholar]
- Blanco, J.L.; Fernández-Madrigal, J.A.; Gonzalez, J. Toward a Unified Bayesian Approach to Hybrid Metric—Topological SLAM. IEEE Trans. Robot. 2008, 24, 259–270. [Google Scholar] [CrossRef]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Camebridge, MA, USA, 2005. [Google Scholar]
- Sprickerhof, J.; Nüchter, A.; Lingemann, K.; Hertzberg, J. A heuristic loop closing technique for large-scale 6d slam. Automatika 2011, 52, 199–222. [Google Scholar] [CrossRef]
- Mur-Artal, R.; Montiel, J.M.M.; Tardos, J.D. ORB-SLAM: A versatile and accurate monocular SLAM system. IEEE Trans. Robot. 2015, 31, 1147–1163. [Google Scholar] [CrossRef]
- Szeliski, R. ComputeR Vision: Algorithms and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Pizzoli, M.; Forster, C.; Scaramuzza, D. REMODE: Probabilistic, monocular dense reconstruction in real time. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Hong Kong, China, 31 May–7 June 2014; pp. 2609–2616. [Google Scholar]
- Yamaguti, N.; Oe, S.; Terada, K. A method of distance measurement by using monocular camera. In Proceedings of the 36th SICE Annual Conference, SICE’97, Tokyo, Japan, 29–31 July 1997; International Session Papers. IEEE: Tokyo, Japan, 1997; pp. 1255–1260. [Google Scholar]
- Cyganek, B.; Siebert, J.P. An Introduction to 3D Computer Vision Techniques and Algorithms; John Wiley & Sons: New York, NY, USA, 2011. [Google Scholar]
- Leonard, J.; How, J.; Teller, S.; Berger, M.; Campbell, S.; Fiore, G.; Fletcher, L.; Frazzoli, E.; Huang, A.; Karaman, S.; et al. A perception-driven autonomous urban vehicle. J. Field Robot. 2008, 25, 727–774. [Google Scholar] [CrossRef] [Green Version]
- Winner, H.; Schopper, M. Adaptive cruise control. In Handbook of Driver Assistance Systems: Basic Information, Components and Systems for Active Safety and Comfort; Springer: Berlin, Germany, 2014; pp. 1–44. [Google Scholar]
- Choi, D.J. Automatic Parking System, 2000. U.S. Patent 6,085,124, 4 July 2000. [Google Scholar]
- Bellone Mauro, P.L.; Giulio, R. A kinect-based parking assistance system. Adv. Robot. Res. 2014, 1, 127–140. [Google Scholar] [CrossRef]
- Kolb, A.; Barth, E.; Koch, R.; Larsen, R. Time-of-Flight Sensors in Computer Graphics; Eurographics (STARs): Delft, The Netherlands, 2009; pp. 119–134. [Google Scholar]
- Spedicato, L.; Giannoccaro, N.I.; Reina, G.; Bellone, M. Clustering and PCA for reconstructing two perpendicular planes using ultrasonic sensors. Int. J. Adv. Rob. Syst. 2013, 10, 210. [Google Scholar] [CrossRef]
- Reina, G.; Bellone, M.; Spedicato, L.; Giannoccaro, N.I. 3D traversability awareness for rough terrain mobile robots. Sens. Rev. 2014, 34, 220–232. [Google Scholar] [CrossRef]
- Bellone, M.; Reina, G. Pavement distress detection and avoidance for intelligent vehicles. Int. J. Veh. Auton. Syst. 2016, 13, 152–167. [Google Scholar] [CrossRef]
- The KITTI Vision Benchmark Suite. Technical Report. Available online: http://www.cvlibs.net/datasets/kitti/eval_road.php (accessed on 15th July 2018).
- Gern, A.; Moebus, R.; Franke, U. Vision-based lane recognition under adverse weather conditions using optical flow. In Proceedings of the IEEE Intelligent Vehicle Symposium, Versailles, France, 17–21 June 2002; Volume 2, pp. 652–657. [Google Scholar]
- Bellone, M.; Reina, G.; Caltagirone, L.; Wahde, M. Learning traversability from point clouds in challenging scenarios. IEEE Trans. Intell. Transp. Syst. 2018, 19, 296–305. [Google Scholar] [CrossRef]
- Kirk, B. Business Opportunities in Automated Vehicles; NRC Research Press: Ottawa, ON, Canada, 2016. [Google Scholar]
- Schreurs, M.A.; Steuwer, S.D. Autonomous driving-political, legal, social, and sustainability dimensions. In Autonomes Fahren; Springer: Berlin, Germany, 2015; pp. 151–173. [Google Scholar]
- European Commission. Roadmap to a Single European Transport Area—Towards a Competitive and Resource Efficient Transport System; Technical Report, 2011; European Commission: Brussels, Belgium, 2011. [Google Scholar]
- Driving, A. Levels of Driving Automation Are Defined in New SAE International Standard J3016: 2014; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Duration | Passengers | Travel Distance | Target Group | |
|---|---|---|---|---|
| Ongoing Pilots in the EU | ||||
| Bad Birnbach, Germany October 2017–2018 | 6 months | 50 per day | 700 m | Inhabitants |
| Berlin, Germany March 2018 | 24 months | N/A | 1900 m | Inhabitants |
| Fribourg, Switzerland, 2017 | August 2017 onwards | N/A | 1300 m | Inhabitants |
| Château de Vincennes, Paris, France 2017–2018 | 12 months | 200 per day | 1880 m | Visitors |
| Helsinki, Finland 2016–2018 | 24 months | 5600 per pilot | 1000 m–3000 m | Inhabitants |
| La Defense, Paris, France July–December 2017 | 6 months | N/A | N/A | Inhabitants |
| Renningen, Germany 2018 | N/A | N/A | 1200 m | Inhabitants |
| Saclay, France February–March 2018 | 2 months | 20 per day | 2500 m | Inhabitants |
| Sion, Switzerland, 2016–2018 | 24 months | 60,000 per pilot | 1500 m | Visitors |
| Stockholm, Sweden January–June 2018 | 6 months | 150 per day | 2000 m | Inhabitants |
| Toulouse, France Dec 2017–May 2018 | 6 months | 100 per day | 1160 m | Inhabitants |
| Wageningen, The Netherlands 2016–2019 | 48 months | N/A | 200 m–4000 m | N/A |
| Completed Pilots in the EU | ||||
| La Rochelle, Rance, December 2014–April 2015 | 4 months | 14,660 per pilot | 1900 m | N/A |
| Tallinn, Estonia, 2017 | 3 months | Around 10,000 | 800 m | Inhabitants and Visitors |
| Lausanne, Switzerland, 2015 | 4.5 months | 7000 per pilot | 1500 m | Inhabitants |
| Oristano, Italy, July 2014–September 2014 | 2 months | 2580 per pilot | 1300 m | N/A |
| San Sebastian, Spain 2016 | 3 months | 2750 per pilot | 1200 m | Inhabitants |
| Sophia Antipolis, France, February 2016–March 2016 | 2 months | 4059 Per pilot | 1000 m | Inhabitants |
| Trikala, Greece, 2015–2016 | 3–5 months | 12,100 per pilot | 2800 m | N/A |
| Vantaa, Finland, May 2015–August 2015 | 4 months | 19,000 per pilot | 900 m | Visitors |
| Leipzig, Germany, 2016 | 1–5 months | 400 per pilot | 1600 m | Inhabitants |
| Lyon, France October 2016–December 2017 | 14 months | N/A | 1350 m | Inhabitants |
| Michelin Research Center, France, 2016 | 6 months | 3000 per pilot | 1000 m | Inhabitants |
| Toulouse, France 2017 | 3 months | 3210 per pilot | 340 m | N/A |
| Rest of the World | ||||
| Bad Birnbach, Germany October 2017–2018 | 6 months | 50 per day | 700 m | Inhabitants |
| Berlin, Germany March 2018 | 24 months | N/A | 1900 m | Inhabitants |
| Fribourg, Switzerland, 2017 | August 2017 onwards | N/A | 1300 m | Inhabitants |
| Château de Vincennes, Paris, France 2017–2018 | 12 months | 200 per day | 1880 m | Visitors |
| Helsinki, Finland 2016–2018 | 24 months | 5600 per pilot | 1000 m–3000 m | Inhabitants |
| La Defense, Paris, France July–December 2017 | 6 months | N/A | N/A | Inhabitants |
| Renningen, Germany 2018 | N/A | N/A | 1200 m | Inhabitants |
| Saclay, France February–March 2018 | 2 months | 20 per day | 2500 m | Inhabitants |
| Sion, Switzerland, 2016–2018 | 24 months | 60,000 per pilot | 1500 m | Visitors |
| Stockholm, Sweden January–June 2018 | 6 months | 150 per day | 2000 m | Inhabitants |
| Toulouse, France December 2017–May 2018 | 6 months | 100 per day | 1160 m | Inhabitants |
| Wageningen, The Netherlands 2016–2019 | 48 months | N/A | 200 m–4000 m | N/A |
| Adelaide, Australia (N/A) | Oslo & Gjesdal, Norway (2018, 2019) |
| Calgary, Canada (2018) | San Francisco, U.S. (2020) |
| Copenhagen, Denmark (2018) | Stavanger, Norway (2018) |
| Gainesville, U.S. (2018) | Sydney, Australia (2018) |
| Gothenburg, Sweden (2018) | Christchurch Airport, New Zealand (2018) |
| Hamburg, Germany (2018) | Melbourne, Australia (2018) |
| Knoxville, U.S. (2018) | Ann Arbor, Michigan, U.S. (2018) |
| London, U.K. (N/A) | Shenzhen, China (2018) |
| Gjøvik, Norway (2018) | Kongsberg, Norway (2018–2019) |
| Drammen, Norway 2020 | Vejle, Denmark (2019) |
| Tallinn, Estonia (2019, 2020–2022) | Koppl, Austria (2018–2020) |
| Vienna, Austria (2019) | Helsinki, Finland (2018, 2019, 2020) |
| Gdansk, Poland (2019) |
| EasyMile | Navya | |
|---|---|---|
| Operating temperature | −10 °C and 40 °C | −10 °C and +35 °C |
| Humidity | <95% | <95% |
| Wind (continuous) | <55 km/h | <55 km/h |
| Wind (temporary) | <85 km/h | <85 km/h |
| Rain | <5 mm/h | <5 mm/h |
| Max snow on the road | (light snow) 10 cm | (light snow) 10 cm |
| Minimum friction coefficient | >0.2 | >0.2 |
| Ice on the road | No ice | No ice |
| Fog/steam/smoke | No | No |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ainsalu, J.; Arffman, V.; Bellone, M.; Ellner, M.; Haapamäki, T.; Haavisto, N.; Josefson, E.; Ismailogullari, A.; Lee, B.; Madland, O.; et al. State of the Art of Automated Buses. Sustainability 2018, 10, 3118. https://doi.org/10.3390/su10093118
Ainsalu J, Arffman V, Bellone M, Ellner M, Haapamäki T, Haavisto N, Josefson E, Ismailogullari A, Lee B, Madland O, et al. State of the Art of Automated Buses. Sustainability. 2018; 10(9):3118. https://doi.org/10.3390/su10093118
Chicago/Turabian StyleAinsalu, Jaagup, Ville Arffman, Mauro Bellone, Maximilian Ellner, Taina Haapamäki, Noora Haavisto, Ebba Josefson, Azat Ismailogullari, Bob Lee, Olav Madland, and et al. 2018. "State of the Art of Automated Buses" Sustainability 10, no. 9: 3118. https://doi.org/10.3390/su10093118
APA StyleAinsalu, J., Arffman, V., Bellone, M., Ellner, M., Haapamäki, T., Haavisto, N., Josefson, E., Ismailogullari, A., Lee, B., Madland, O., Madžulis, R., Müür, J., Mäkinen, S., Nousiainen, V., Pilli-Sihvola, E., Rutanen, E., Sahala, S., Schønfeldt, B., Smolnicki, P. M., ... Åman, M. (2018). State of the Art of Automated Buses. Sustainability, 10(9), 3118. https://doi.org/10.3390/su10093118