Accuracy Improvement of Real-Time Location Tracking for Construction Workers

1
Department of Architectural Engineering, Gyeongnam National University of Science and Technology, 33, Dongjin-ro, Jinju-si 52725, Korea
2
Department of Architectural Engineering, University of Seoul, Seoul 130-743, Korea
*
Author to whom correspondence should be addressed.
Sustainability 2018, 10(5), 1488; https://doi.org/10.3390/su10051488
Submission received: 4 April 2018
/
Revised: 2 May 2018
/
Accepted: 7 May 2018
/
Published: 9 May 2018
(This article belongs to the Section Sustainable Engineering and Science)
Abstract
:Extensive research has been conducted on the real-time locating system (RTLS) for tracking construction components, including workers, equipment, and materials, in order to improve construction performance (e.g., productivity improvement or accident prevention). In order to prevent safety accidents and make more sustainable construction job sites, the higher accuracy of RTLS is required. To improve the accuracy of RTLS in construction projects, this paper presents a RTLS using radio frequency identification (RFID). For this goal, this paper develops a location tracking error mitigation algorithm and presents the concept of using assistant tags. The applicability and effectiveness of the developed RTLS are tested under eight different construction environments and the test results confirm the system’s strong potential for improving the accuracy of real-time location tracking in construction projects, thus enhancing construction performance.
1. Introduction
Accident prevention is directly linked not only to safety, but also sustainability. From the perspective of sustainability, occupational health and safety (OHS) is critical for sustainable development [1]. Based on the three-pronged model of sustainability suggested by McKeown [2], the role of OHS in promoting sustainability can be discussed in three dimensions: people, planet, and profit. Among these dimensions, people should be directed towards promoting respect for diversity and human rights; health and safety protection; and empowerment and caring [3].
With regard to safety improvement and sustainability, diverse technologies have been applied in the construction industry for reducing accident occurrence. Among various technologies, real-time locating systems (RTLSs) have been widely used in the construction industry. A RTLS for construction components such as labor, equipment, and materials offers numerous opportunities to improve construction performance. These include accident prevention [4,5,6,7,8], productivity measurement and improvement [9,10], progress monitoring [11,12], and material management [13,14,15].
Among these approaches, accident prevention approaches using RTLS have tried to reduce human error (e.g., near-miss accident, lack of hazard recognition, inexperienced labor) [16,17]. One representative approach is that a safety management system tracks laborers’ location and alerts them when they move near to hazardous areas. Therefore, accident prevention approaches based on RTLS require high accuracy of location tracking, because low accuracy of location tracking can result in system error and fail to prevent an accident.
When a RTLS is used in order to prevent an accident, an accurate RTLS for laborers’ locations is one of the most important components. However, several factors (e.g., multi-path, shadow area, signal loss) can cause location estimation errors and decrease the accuracy of location tracking. Apart from the general problems of location tracking, the characteristics of construction sites make location tracking difficult. As mentioned above, a construction site usually consists of indoor (building construction work) and outdoor (earthwork phase and outdoor civil construction) activity areas. Therefore, the location tracking technology selected should be able to be used in both areas. Although the accuracy of localization is considerably influenced by signal availability, maintaining enough signal availability is very difficult at construction sites [8].
The accuracy of a location-sensing system depends highly on the environment, which can be classified as a line of sight (LOS) or non-line of sight (NLOS) environment. LOS environments have few obstacles; thus, communications between tags and readers are usually undisturbed. However, LOS environments in a construction site can cause localization errors, because there are diverse materials. Moreover, the dynamic changes in a construction site can cause a shift from LOS environments to non-line of sight NLOS environments. NLOS environments can decrease the accuracy of a location-sensing system. This change, which is one of the most remarkable characteristics of location-sensing on construction sites, should be considered in order to improve the accuracy of a location-sensing system. Therefore, localization errors should be solved under both LOS and NLOS conditions.
To address these difficulties in location tracking, this paper develops an accurate and effective real-time locating system (RTLS) for construction sites. In particular, the workers’ location on construction sites is focused on, because construction activities are highly labor intensive. This paper is organized as follows. We first conduct a literature review on location-tracking technologies in construction and discuss the main reasons for the occurrence of localization error. Next, we introduce location tracking error mitigation algorithms and suggest the use of assistant tags in order to overcome NLOS conditions to improve tracking accuracy in construction projects. Based on these ideas, we develop an RFID-based RTLS and test its applicability and effectiveness. Finally, we draw some conclusions based on the test results.
2. Literature Review
This chapter introduces a location-sensing selection procedure based on comparative overview. Literature and current approaches to ways in which the accuracy of a given location-sensing technology can be improved are reviewed.
2.1. Location-Sensing Technologies
One of the most widely used location-sensing technologies is the global positioning system (GPS), which locates a target object by using a network of 24 satellites [18]. GPS is quite effective in locating and tracking objects in outdoor environments [19], but has an inherent weakness in locating indoor objects. This has limited the effectiveness of GPS in building construction projects, where many activities are conducted indoors. Therefore, there is a need for a method that can be applied to indoor and outdoor conditions.
There are diverse locating methods that can determine the location of objects in both indoor and outdoor conditions. These methods consist of location measurement methods (e.g., triangulation, scene analysis, and proximity), distance measurement methods (e.g., angle of arrival (AOA), received signal strength indication (RSSI), time of arrival (TOA), and time difference of arrival (TDOA)), and technologies (e.g., Infrared, IEEE 802.11, Ultrasonic, ultra wide band (UWB), and RFID). These methods have problems, such as multi-path, obstacle (shadow area), and signal loss [20,21].
IEEE 802.11b products are easy to set up for general indoor conditions, as well as construction sites. Nevertheless, they do not guarantee high-accuracy location sensing. Ultrasonic has a relatively higher accuracy than other technologies. Despite its higher accuracy, an ultrasonic-based system requires a great deal of infrastructure and cost in order to be highly accurate [22]. Another problem is that it is difficult to install this system on construction sites. It cannot penetrate obstacles such as walls or installed forms, which are usually the main components of ongoing construction projects [23].
Although UWB presents the highest accuracy, it is difficult to apply to outdoor construction activities because the signal transmission distance is approximately 20 m [24]. This short signal transmission distance means that a number of readers are required in order to cover a whole construction site, and it is not cost-effective.
RFID has been widely used for checking and estimating accessibility in urban spaces [25,26]. These methods are operated by capturing the signal from a user. The captured signal is considered as a user’s access to a specific reader (which is a reference location already known). This approach is operated based on the one-on-one matching between a tag and a reader [27]. Thus, it can estimate a tag’s location by means of range from a reader. This method can be expanded from location identification to positioning by using multiple readers, like GPS. Theoretically, at least three readers are required to identify a target’s location (positioning). In this approach (using more than three readers), RFID is still relatively cost-effective and has high capability for information transfer.
Despite its strengths, it is heavily influenced by environments, which cause multi-paths, obstacles (i.e., shadow areas), or signal loss [20,21]. This is because the accuracy of location sensing largely relies on the strength of the tracking signal [8], which can vary depending on the tracking environment. RFID is a small electronic device that consists of a small chip and an antenna. An RFID-based RTLS can store and retrieve location data by utilizing a number of tags (which are attached to target objects) and readers (i.e., tracking equipment). To locate a target object, a reader receives data emitted from a tag attached to the target object. After transmitting and receiving the location data, an RFID-based RTLS can calculate the coordinates of a target tag. Many researchers have proposed the use of RFID for location tracking because of its good tracking performance and cost-effectiveness [13,19,28]. For example, Ni et al. [19] developed an RFID-based indoor location-sensing system that can improve the overall accuracy of location sensing by applying reference tags. Song et al. [13] developed a mathematical model that estimates the signal strength within a construction site. Similarly, Skibniewski and Jang [28] suggested a framework for automated real-time location tracking of construction materials based on RFID signals combined with ultrasonic waves. By providing supplementary tracking tools (e.g., a signal strength fingerprint map), these approaches are effective in tracking indoor objects when site conditions are well pre-determined. When installing the location-sensing systems (i.e., determining the suitable location of the readers), a signal strength fingerprint map has strong potential to improve the overall accuracy of RTLS. However, the tracking environments in a construction site can vary significantly as the project progresses. Therefore, this paper suggests an enhanced RTLS that can improve the accuracy of location tracking in construction projects.
2.2. Movement Chacrateristics
Tracked objects have their own characteristics (e.g., direction, range, and velocity). Thus, if we understand the characteristics of the target, then it can be involved in an RTLS [29]. There are a few researchers dealing with movement characteristics of a target for location-sensing [29,30]. One main example is the research of Son et al. [29]. They suggested an enhanced asset-locating system for vehicle pooling in a port terminal. This system focused on the range and speed of a transfer crane. A transfer crane has three parameters: path, range and velocity (x-, y-, and z-axes). Moreover, each axis has a range that can be movable.
Unlike vehicles in a port terminal, construction workers do not have a specific direction. A worker can move in all directions. One similar characteristic between a construction worker and a vehicle in a port terminal is having a velocity range. If information about the velocity range of a worker is incorporated into the location-sensing engine, a log—which is defined as data that records a target’s location by specific time interval—located on outside of a target’s range means that a measured log can be considered an error. Based on the consideration of this characteristic of tracking a worker’s movement characteristics, this paper selects the velocity of workers as a primary factor to mitigate estimation errors.
2.3. Location-Tracking Error Caused by Multi-Path and NLOS
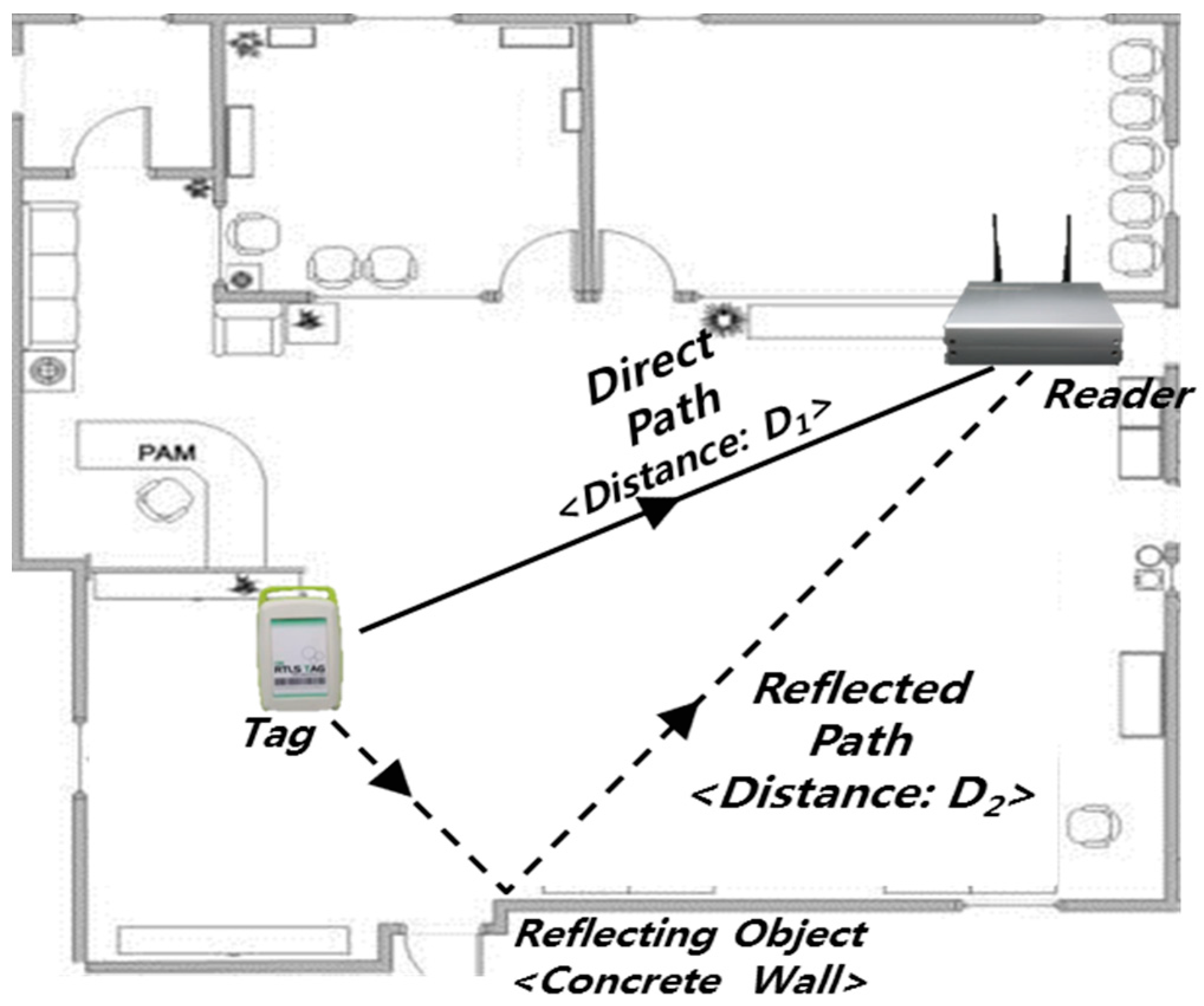
There are two main reasons for location-tracking error. One is multi-path of signals and the other is NLOS. First, in an RFID-based RTLS, a tag repeatedly emits radio frequency signals and a reader receives these signals. The location of the tag is estimated based on the signal flight time from the tag to the reader. A tag transmits omnidirectional signals, and can make both direct and reflected paths. Accordingly, the flight times of signals emitted from a tag at a certain moment can vary depending on the type of signal path. For example, as shown in Figure 1, the distance of the direct path (D1) is shorter than that of the reflected path (D2). In this case, a reader receives two different signals, and the difference can cause an error. If the reader receives a signal conveyed through the reflected path, the reader estimates the location of the tag based on the distance of the reflected path (D2), which is longer than the actual distance (D1). In detail, the velocity of a signal emitted from a tag is constant. Thus, if there are two different paths (see direct path and reflected path in Figure 1), the reader regards them as having been emitted from a different location, because the reader calculates the distance between a tag and a reader using only signal travel time. Thus, when a reflected signal arrives at the reader, the reader estimates the distance as D2 without any consideration of reflection (straight line). Thus, if the tracking signal through the direct path is not successfully delivered, a reflected path can cause an estimation error as great as the distance difference between the direct and reflected paths (D2-D1).
NLOS environments can heavily decrease the accuracy of location sensing. Uses of the reference tags and the assistant tags are two primary examples that can increase the accuracy of location sensing without the additional installation of readers. The concept of reference tags is introduced in LANDMARC [19]. It serves as a reference point in the system. Its use does not require a large number of expensive RFID readers; rather, its use requires extra RFID tags, which are cheaper than RFID readers. It can also make location-sensing results more accurate and reliable. In spite of reference tags having advantages, the installation of additional tags can interrupt construction activities. In terms of constructability, an assistant tag (active tag attached to other workers) can be an alternative. Although the concept of the assistant tag is very similar to that of the reference tag, the primary difference is the installation place. In this paper, assistant tags are attached to workers’ safety helmets, and tags follow workers’ movements. When a tag is in an NLOS environment, another tag that can be detected in an LOS environment can communicate with the first tag (in the NLOS environment) and readers. This approach has been attempted to convert an NLOS environment into a LOS environment [8,31]. By utilizing the concept of assistant tags, interruptions for construction activities can be minimized and additional effort for installing reference tags or readers is not required. However, there are two remaining problem that can be described as determination of environment condition and selection of proper RFID readers. If two problems remain, there may be less benefit to applying assistant tags. Thus, current problems for application of assistant tag concept will be addressed in this paper.
3. Methodology
3.1. Algorithm Development to Overcome Multi-Path
Generally, moving objects have their own movement characteristics in terms of direction, range and velocity. Effective use of these characteristics of a target object can afford valuable information for filtering out location-estimation errors, and thereby improve tracking accuracy [27,30]. Consequently, some notable research has applied the movement characteristics of a target object for location sensing [29,30,31,32]. For example, Son et al. [29] introduced an enhanced asset locating system for vehicle pooling in a port terminal by using the information on the range and speed of a transfer crane.
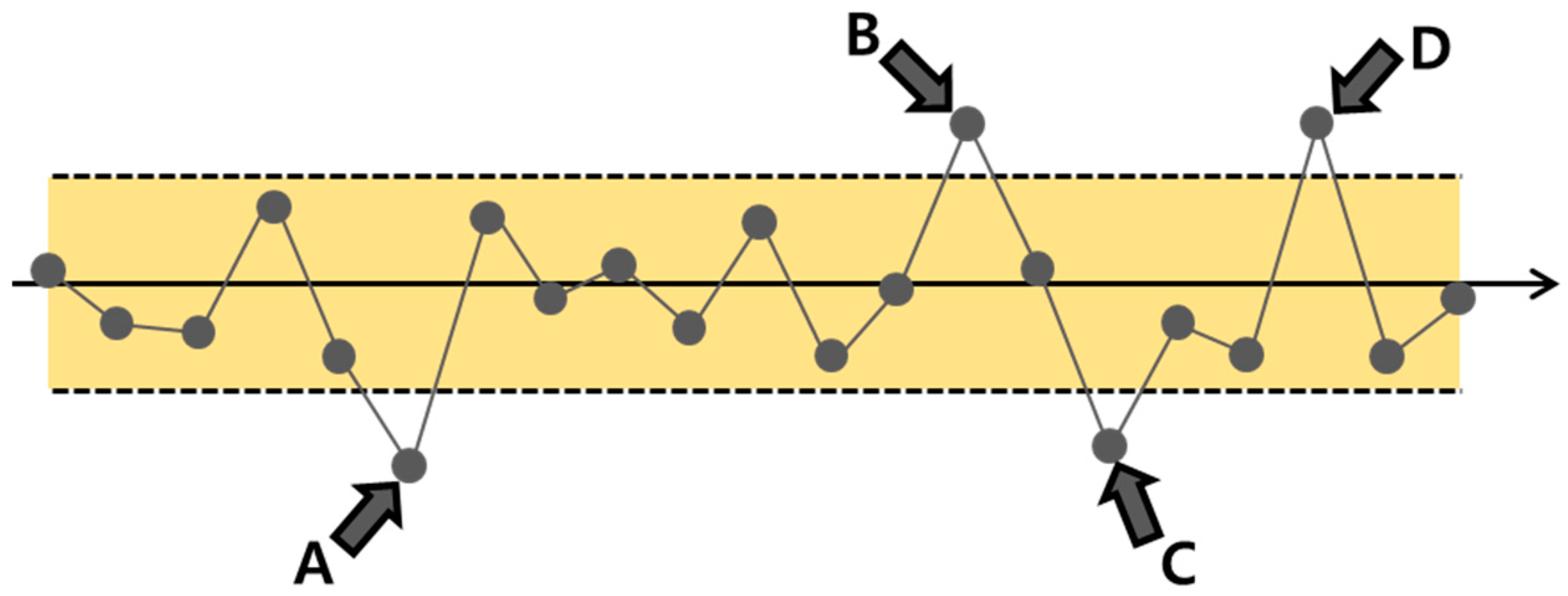
Since construction equipment and workers also have their own movement characteristics (e.g., operating range, velocity, and path), the movement characteristics of a target object in construction projects are expected to improve the accuracy of real-time location tracking. Use of possible movement range information is the simplest way to detect location estimation errors. If the arrow line is a worker’s actual path and the area between the two dotted lines is a possible range where the worker could move (see Figure 2), application of the information of possible movement range can easily detect four points (A, B, C, and D) as location estimation errors, since they are located outside the possible range.
As such, the possible movement range information is helpful to improve the accuracy of a location-sensing system. However, this kind of information is not very effective for detecting localization errors within the range. Furthermore, it is tedious and time-consuming to define and update the information of all possible movement ranges, particularly in a construction project where possible movement range can vary significantly as the project progresses.
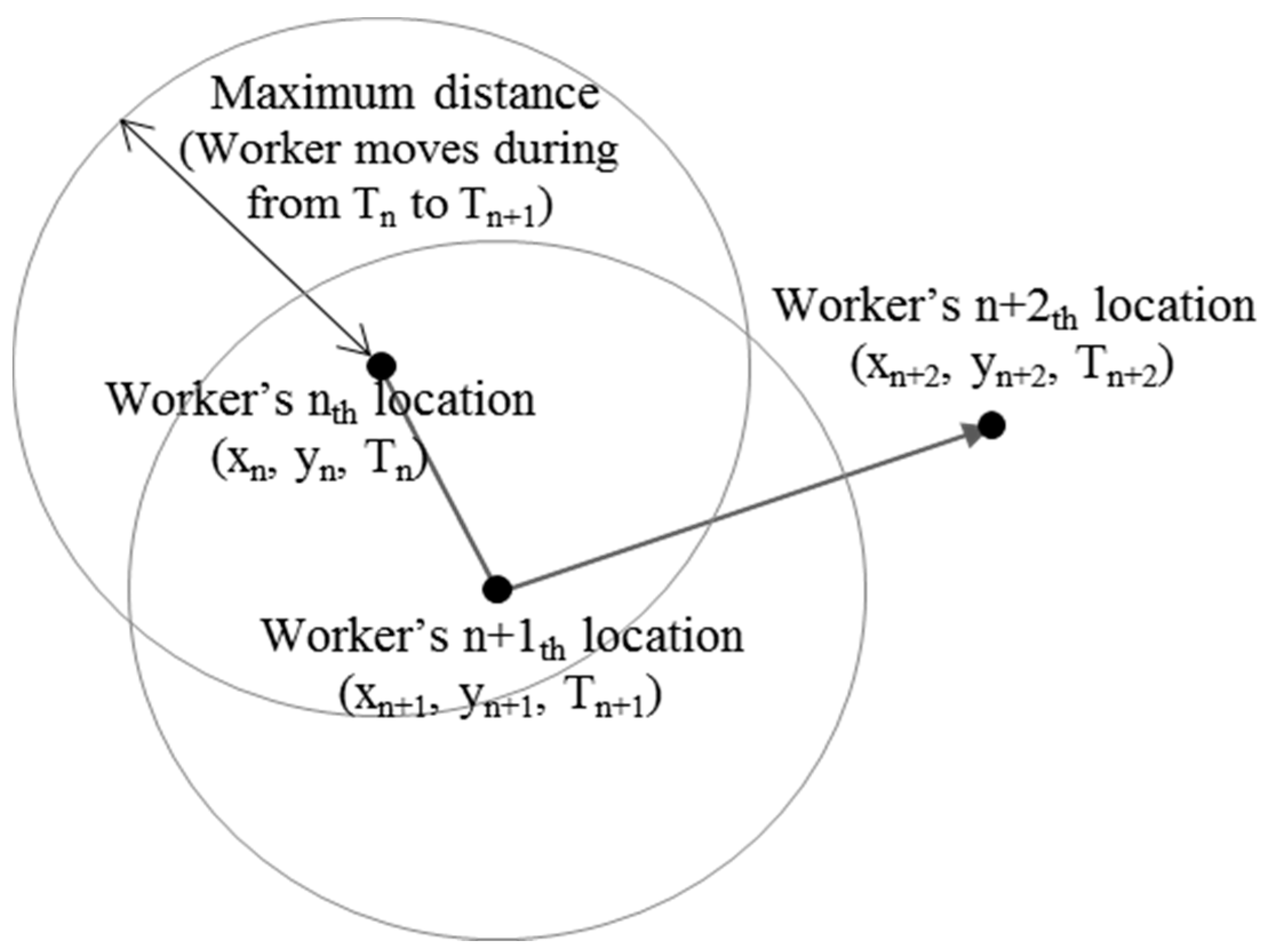
Acknowledging these challenges, this paper proposes the concept of reducing location estimation errors by calculating distances between two consecutive logs (i.e., signals). As mentioned above, a target object moving in a construction site has its own movement speed range. Several studies have suggested [33,34] that many people tend to walk at about 1.4 m/s when they walk on general pedestrian walkways. Considering construction sites usually provide harsh conditions, such as poorly paved surfaces, wet and oily surfaces, and slope ways, construction workers may walk slower than general pedestrians. With this in mind, an experiment was conducted on a construction site. The participants were asked to allow recording (using video record) of their walking during their tasks. In this experiment, a total number of 1124 steps (strides) were analyzed. Among these 1124 steps, only 27 steps were over 70 cm/s. Thus, in this study, 70 cm/s is used as the threshold of a possible movement range. Figure 3 illustrates the concept of how to determine an error. A worker cannot move more than the maximum distance calculated based on the worker’s maximum velocity and time (time difference between two consecutive logs). In Figure 3, n + 1th location log is within the range and can be determined as a proper log. However, n + 2th location log is located on outside of the range. The n + 2th location log means that a worker moves beyond his/her maximum speed, so that this log can be determined as an error.
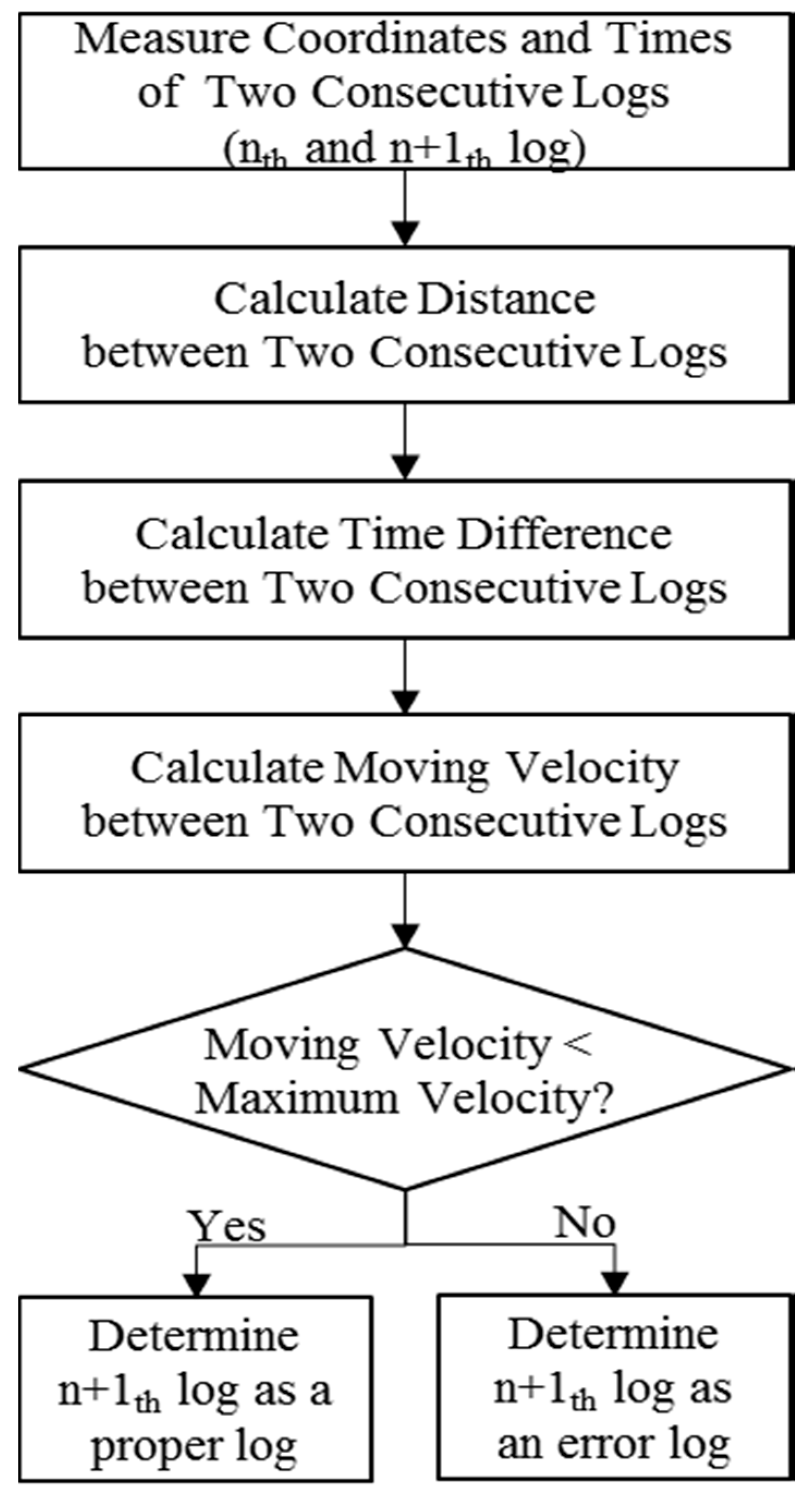
Figure 4 presents the procedure for how the suggested RTLS calculates every log. At first, the distance and time difference between two consecutive logs (nth and n + 1th log) are calculated. Based on this information, the moving velocity between logn (defined by xn, yn, zn, tn) and logn+1 (defined by xn+1, yn+1, zn+1, tn+1) is obtained using Equation (1).
Then, if the moving velocity between a log (logn) and the next log (logn+1) exceeds the maximum velocity of a target object, the next log is regarded as a localization error and is eliminated in the locating process.
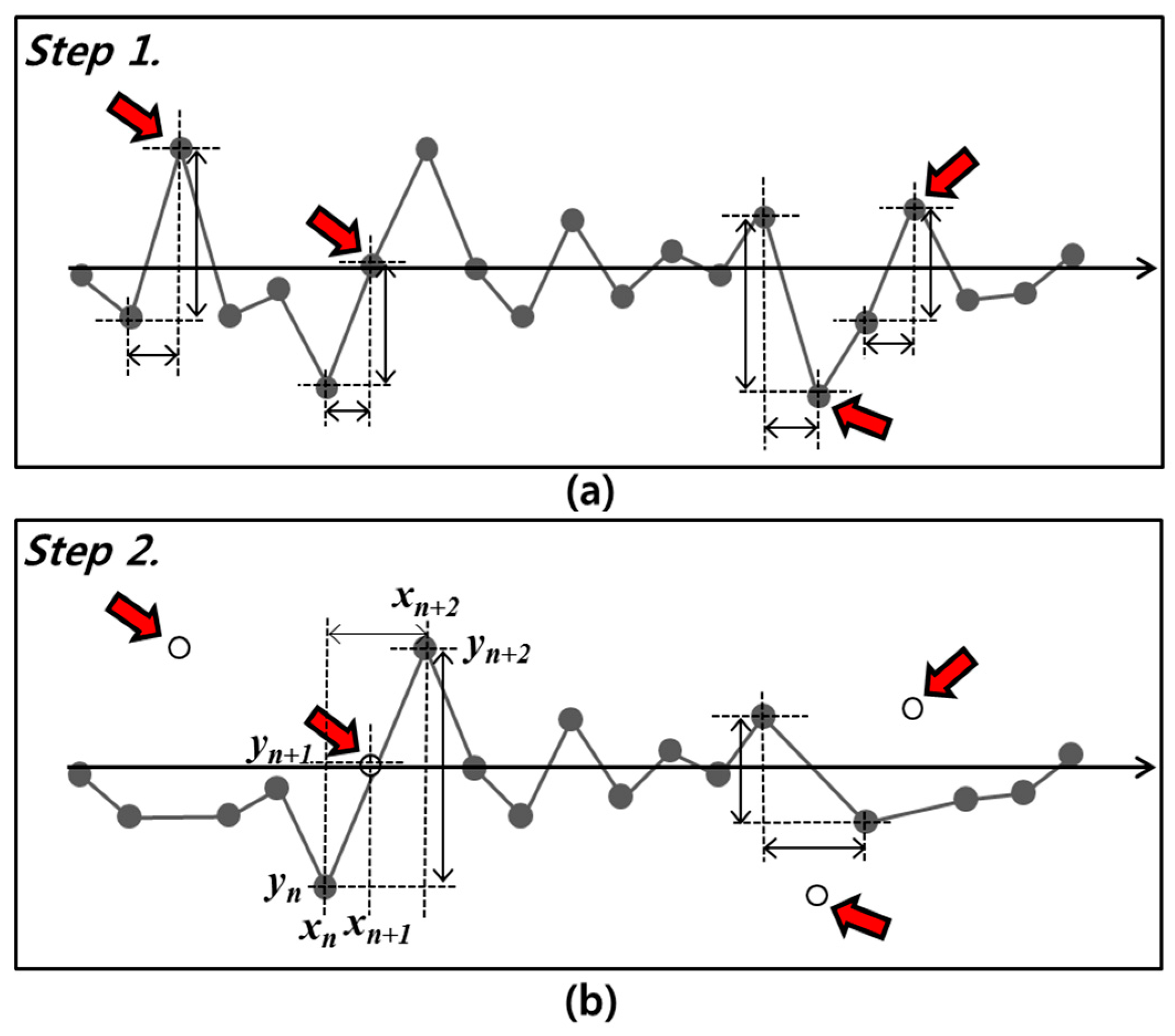
Although an error can be identified by the aforementioned method, there is still a problem that is caused by serial errors. More than two consecutive error logs cannot be dealt with using the suggested method, since the above method is to determine that logn+1 exceeds the maximum velocity when logn is within the maximum velocity. Therefore, error logs are estimated sequentially, and serial errors should be eliminated. As shown in Figure 5, logn+1 is eliminated, because this log is a certain distance away from logn (exceeding the maximum velocity). Then, the locating system calculates the moving velocity between logn and logn+2. By repeating this filtering out process, logs that are measured as moving faster than the maximum velocity are eliminated. The suggested process shown in Figure 5 may provide too few valid logs if many logs are filtered out as errors. However, more than ten thousand signals are transmitted per second, which provides enough logs to locate a moving object, even when many logs are identified as errors.
Time synchronization between tags and readers is important when applying this approach for filtering out location estimation errors. Since the suggested approach determines the location estimation errors based on the moving velocity of a target object, a slight time difference between a tag and a reader may result in significant location-estimation errors. In fact, an RFID-based wireless network is sensitive to this type of error since the network transmits a number of signals for location tracking. To address this issue, several time synchronization protocols that have been suggested for wireless sensor network include reference broadcast synchronization (RBS) [35], timing-sync protocol for sensor network (TPSN) [36], and flooding time synchronization protocol (FTSP) [37]. TPSN was selected as the time synchronization protocol for our study because of its effectiveness in addressing the propagation delay time that can often occur in a construction site.
3.2. Application of Assistant Tags
In order to locate a target object using an RFID tag, at least three readers should receive signals from the tag. Since an RFID tag sends signals omnidirectionally, it is difficult to accurately locate the tag with fewer than three readers. Thus, successful tracking of a moving object requires careful determination of the readers’ installation location so that at least three readers can receive the signals from a tag wherever it is in the tracking environment.
Obstacles between a tag and readers may cause signal attenuation and multi-path, thus preventing successful communication between the tag and the readers. Multi-path is a propagation phenomenon in which two or more paths of radio signals reach a reader due to reflection from walls or floors [36]. Signal attenuation is a gradual loss in radio signal intensity as it propagates through space due to many effects, including free-space loss, diffraction, and absorption [38].
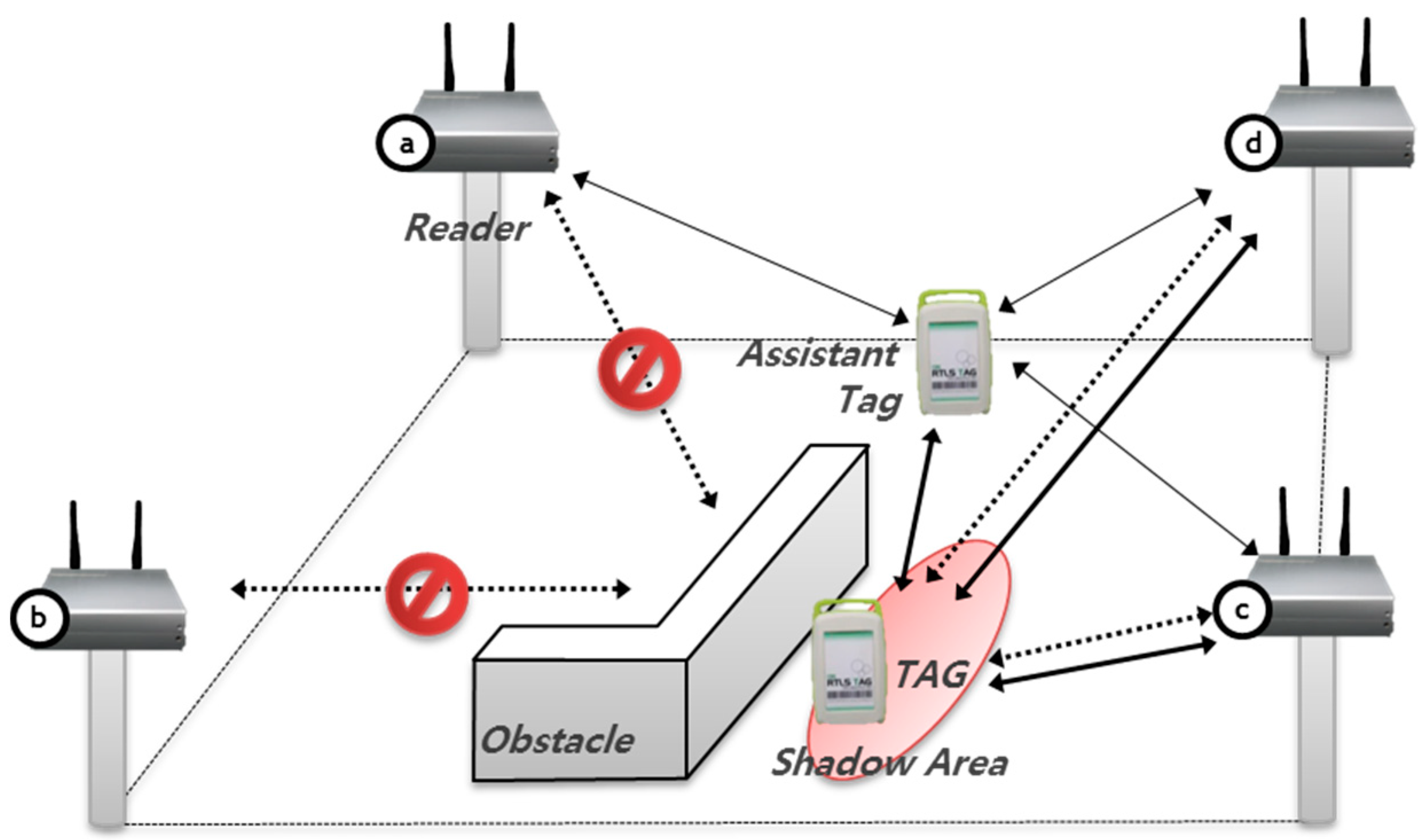
Suppose that four readers are installed in each corner of the room but only two readers (readers C and D) receive signals from the tag, while the other two (readers A and B) do not due to an obstacle (Figure 6). Thus, while more than three readers are installed in this case, it is still difficult to accurately locate the tag, since only two readers receive the signals from the tag.
To address this problem, Lee et al. [8] suggest the idea of assistant tags, which are fundamentally similar to reference tags, but differ in terms of their installation location. Lee et al. [8] suggest attaching assistant tags to workers’ safety helmets, instead of on floors. Hence, tags are not installed on some pre-fixed places on floors but attached to moving workers, which significantly increases the accuracy and applicability of RTLS. In the example shown in Figure 6, an assistant tag works as a virtual reader. That is, three readers (readers A, C and D) receive the signals from the assistant tag and the moving location of the assistant tag is identified. Then, the assistant tag and the two readers (readers C and D) can communicate with the tag in the shadow area. The location of the tag in the shadow area can thus be identified by using an assistant tag.
However, their method has two main limitations. First, they did not suggest method to determine whether the environment is LOS or NLOS. Thus, a tag that is not in a shadow area continuously communicates with an assistant tag. If there is no environment determination method, the RTLS engine can be influenced by multi-paths from assistant tags and other readers. As a result, the accuracy of the location sensing decreases. Moreover, a reader tries to search for signals from a target tag, which can burden the system. This searching can also excessively consume the batteries of readers and tags.
To address this issue, this study suggests a system that can search blink signals from a tag and counts the number of signals. More than three signals mean that the tag can be located without the help of an assistant tag, and the suggested system determines the location of the target tag based on the three readers. On the other hand, when fewer than three signals are detected, the suggested system searches the nearest assistant tag to the target tag and estimates its location based on the two readers and the nearest assistant tag.
Second, although Lee et al. [8] suggested the assistant tag concept for converting NLOS to LOS environment, they did not how to select a proper assistant tag from among various neighboring tags.
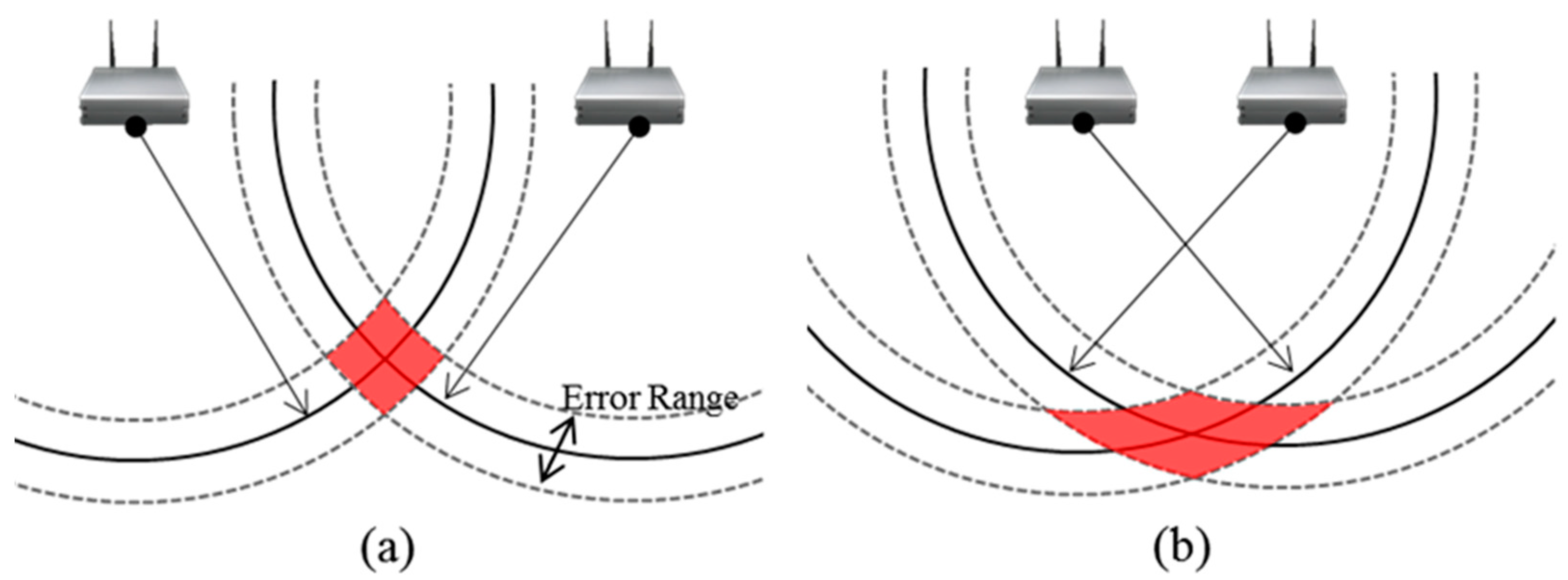
In this paper, to select a specific assistant tag, geometric dilution of precision (GDOP) is used. GDOP has been widely used as an accuracy metric for navigation and tracking systems [39]. GDOP describes error caused by the relative position of GPS satellites. In this study, GPS satellites are converted to the readers. This method is firstly used to select proper readers for accurate positioning. The arrangement of multiple readers according to the relative position of the readers can determine the level of precision in estimating a target location. Figure 7 presents examples of good (low) and poor (high) GDOP. The measurement has error ranges, and the true location of the target will lie anywhere in the red area. In Figure 7b, the error range is the same as in Figure 7a, but the possible position area (red area) has considerably grown due to the arrangement of the two readers. These results mean that the close arrangement of readers can increase the uncertainty of location sensing.
At first, the most recently updated tags among tags with connectivity are extracted. Each selected tag and reader receives a blink message from a target tag, which is used to calculate GDOP rate. After calculating the GDOP rate of each connected assistant tag, an assistant tag with the best GDOP rate (lowest value) is selected and used to estimate a target location. By selecting an appropriate assistant tag, NLOS environments can be converted to LOS environments and the accuracy of location sensing can be also improved.
3.3. Experimental Settings
Tags and readers are two main devices required for locating a target object. A tag attached to a target object sends signals at a regular interval. A tag consists of a microcontroller, a wireless communication module, and a sensor module. In this paper, the MSP430F5xxx series by Texas Instruments, which gives satisfactory performance and low power consumption, was selected as a microcontroller. The radio transceiver is based on IEEE 802.15.4a, which uses the chirp spread spectrum (CSS) on the 2.4 GHz industrial science medical (ISM) band. In addition, the tag uses acceleration sensors to calculate the velocity of a target object, so that a candidate location range can be determined.
A reader consists of a core process module and a wireless communication module. It receives signals transmitted from a target tag and sends them back to the target tag to estimate the tag-reader distance. In this paper, the readers were selected as the Cortex-M3 produced by the ARM corporation, which can receive location logs in 72 MHz. This reader also includes 128 KB flash and 20 KB RAM. There are two types of readers: stationary and portable. In general, the stationary type is preferred when there is a power supply. Otherwise, the portable type is preferred since it works with a battery. The battery life of the reader (portable type) selected in this paper was more than three years.
In order to locate a target object using an RFID tag and readers, a target tag first sends a signal in order to search for adjacent readers. A tag sends a signal omnidirectionally, because it discerns in which direction adjacent readers are placed. Once readers successfully receive the signal, they transmit an acknowledgement (ACK) signal to the tags (or assistant tags) in order to confirm that they successfully received the signal for the tags. Then, the readers calculate the distance to the tags and send the distance list to the RTLS engine that locates a target object based on distance information from at least three readers adjacent to a target tag. For the distance measurement, the symmetric double-sided two-way ranging (SDS-TWR) method—a ranging method that utilizes two delays that naturally occur in the signal transmission process for determining the range between two wireless devices—was selected in the RTLS engine because it can measure the round-trip time without synchronizing the measurement clocks [40], thereby significantly reducing the possibility of tracking errors due to clock synchronization.
Under these experimental settings, the suggested system was tested in terms of its location tracking accuracy and location estimation time, since these are two primary factors in assessing the effectiveness of an RTLS [41].
4. Results
4.1. Location Tracking Accuracy
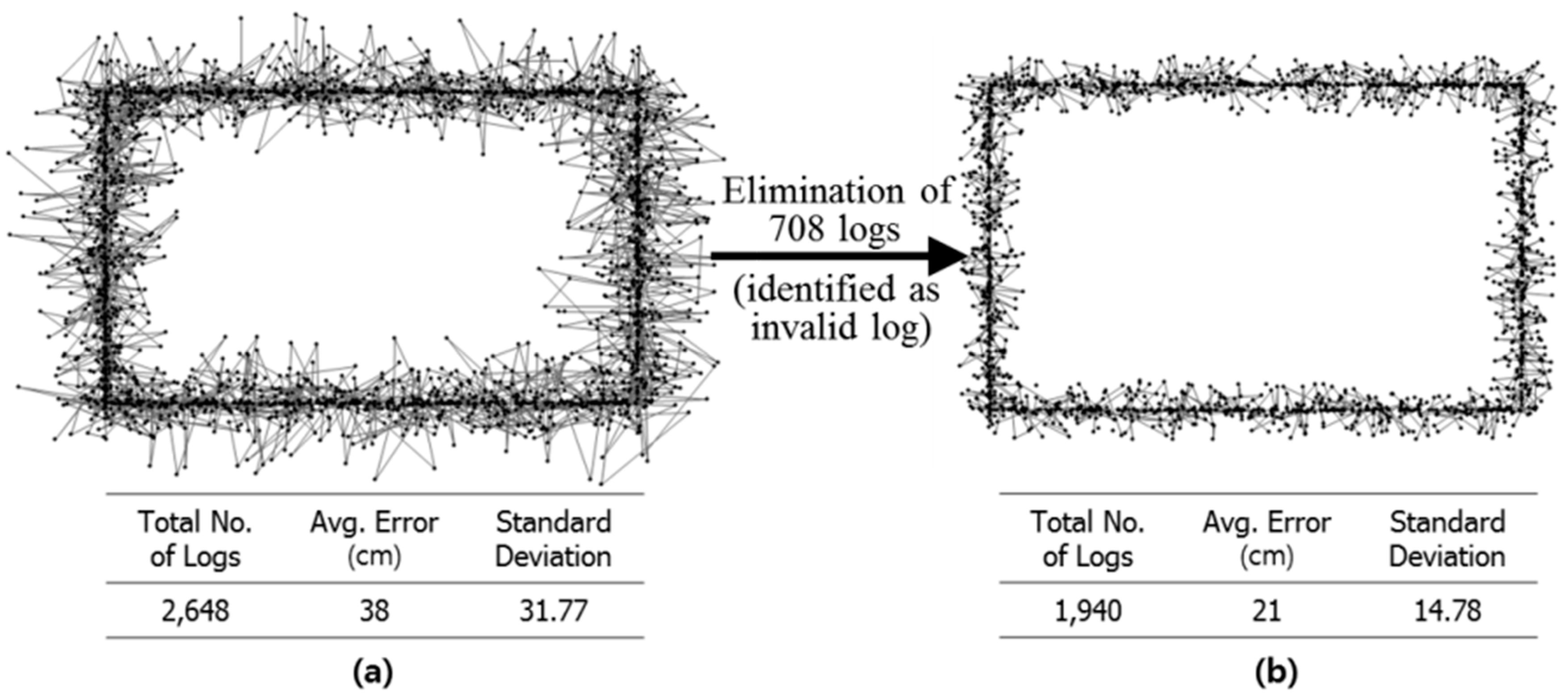
Tests for the accuracy of the suggested system were conducted in two different tracking environments. The first test was performed in a basement parking lot of an ongoing apartment project. The test area had no obstacles except some structural columns. The test analyzed tracking logs of a worker moving around a 7.5 m × 5.5 m rectangle. The moving velocity of the worker was set in the range of 0 cm/s (stop state) to 70 cm/s. Figure 8a shows the tracking logs when the location tracking error mitigation algorithms suggested in this paper were not applied. In this case, 2648 logs were tracked, and the average error was around 38 cm. On the other hand, Figure 8b shows the tracking logs after eliminating the tracking errors identified by the location tracking error mitigation algorithms suggested in this paper. In comparison with the results shown in Figure 8a, the average tracking error was reduced to around 21 cm; a 44% improvement in location tracking accuracy. This improvement was obtained by eliminating the logs that exceeded the maximum distance that a target object can move in a specific time interval. In this test, 708 out of 2648 logs were filtered out as tracking errors by the suggested algorithms. These results demonstrate the strong potential of the suggested location tracking error mitigation algorithms to improve the accuracy of location-tracking in construction projects.
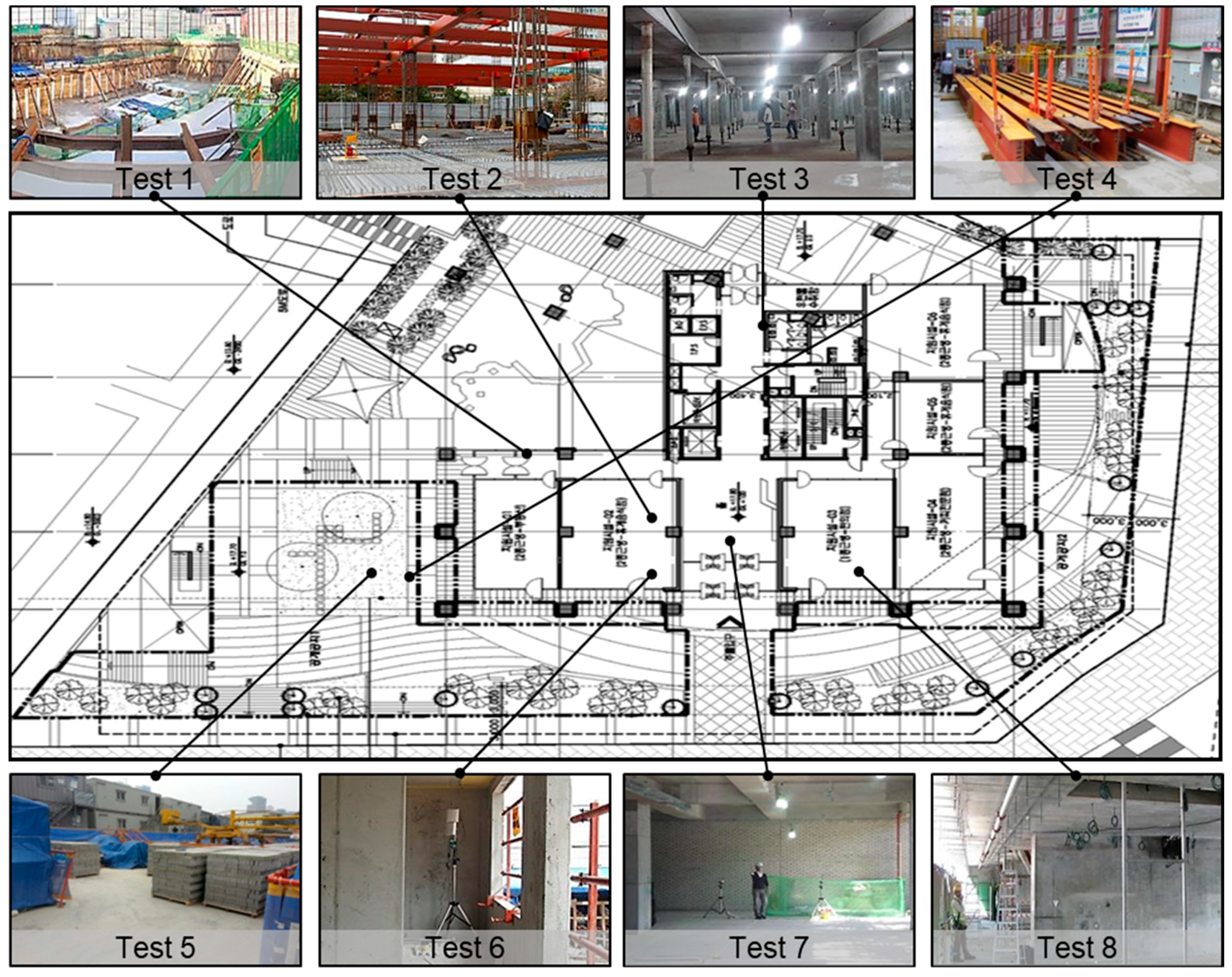
The suggested system was further applied in eight different construction environments in order to test its applicability and effectiveness under various situations, as shown in Figure 9. In each testing environment, four different experiments (A to D) were conducted in order to measure the effect of the location tracking error mitigation algorithms and the application of the assistant tag, as shown in Table 1. The four different experiments are as follows.
- Accuracy experiment A: location tracking applying neither the error mitigation algorithms nor the assistant tags;
- Accuracy experiment B: location tracking applying the error mitigation algorithms only
- Accuracy experiment C: location tracking applying the assistant tags only
- Accuracy experiment D: location tracking applying both the error mitigation algorithms and the assistant tags.
Table 1 shows the tracking results of the four different experiments under eight different construction environments. As expected, the average tracking error (256 cm) was greatest in experiment A. In contrast, experiment D showed the lowest tracking errors (58 cm), resulting in a 77.3% improvement in location accuracy in comparison with experiment A.
In particular, experiment A showed a significant tracking error (791 cm) in stock yard environments where H-beams were piled (i.e., experiment A under test 4). This is because the steel of the H-beams easily causes heavy multi-path and signal attenuation. In this case, applying both the algorithms and the assistant tags (experiment D) can reduce the location tracking error to 96.5 cm, 87.9% of the improvement in tracking accuracy from experiment A. The test results showed that the 65% average improvement in experiment C was slightly higher than that in experiment B (50.3%), which suggests that assistant tags are more effective than the algorithms in tracking environments where there are many obstacles between readers and tags.
4.2. Location Tracking Estimation Time
Location tracking estimation time is an important factor in evaluating performance of an RTLS. Even though RTLS is very accurate, if locating a moving object is too slow, the RTLS is meaningless. The two methods suggested herein for improving the accuracy of RTLS (i.e., location tracking error mitigation algorithms and assistant tags) can significantly increase the location tracking estimation time. To address this issue, this paper suggests a floor classification method that does not measure the z-coordinate but uses the information of floor level in order to reduce the location tracking estimation time while maintaining the accuracy of location tracking. That is, two-dimensional coordinates (x- and y-), rather than three-dimensional coordinates (x-, y- and z-), are used for tracking the location of the target object by arbitrarily assigning the information of the floor number to the z-coordinate.
In order to measure the impact of the floor classification method in reducing location tracking estimation time, the test was conducted under the following three different settings.
- Time experiment A: measuring the estimation time when applying neither location tracking error mitigation algorithms nor assistant tags (i.e., the same to the accuracy experiment A in Table 1).
- Time experiment B: measuring the estimation time when applying both location tracking error mitigation algorithms and assistant tags (i.e., the same to the accuracy experiment D in Table 1).
- Time experiment C: measuring the estimation time when applying the floor classification method in addition to the error mitigation algorithms and assistant.
These three experiments were conducted in three different settings: one floor with four readers, three floors with twelve readers (four readers on each floor), and five floors with twenty readers (four readers on each floor). Furthermore, each experiment was conducted to measure the estimation time in tracking a different number of target tags (i.e., 10 to 50 tags), as shown in Table 2.
As expected, the time experiment A required the shortest time for location estimation and the time experiment B required the longest time. This was mainly attributed to the increased level of computational time and effort to apply the location tracking error mitigation algorithms and assistant tags. This result reveals a trade-off between location tracking accuracy and estimation time. That is, application of the error mitigation algorithms and assistant tags can increase the tracking accuracy by 77.3% (see Table 1) at the cost of 115.5 ms extra computational time. Although seemingly negligible, 115.5 ms may be significant, particularly in RTLS.
There is one thing to be noticed. According to the results, there is a clear trade-off between accuracy and computational time by comparing experiment A and B. Greater accuracy required more computational time. This study used up to 50 tags. In these cases (three floors and five floors case), the time differences are approximately 0.2 s (204 ms) and 0.1 s (107 ms) respectively. These differences seem to suggest that the additional computational time may not be crucial. However, as the number of tags increases, the computational time also increases. If the required time increases excessively when the number of tags is more than that of this experiment (i.e., more than 50), the increase of required time cancels the benefit of increased accuracy. For example, an increased time of more than 3 s—in which workers can move up to approximately 2 m—leads to a safety management system potentially being late to respond to a hazardous situation. In comparison with time experiment B, time experiment C required a similar time (391.4 ms) to that of time experiment A, while maintaining the same level of accuracy as experiment B. This result confirmed the effectiveness of the suggested floor classification algorithms in reducing location tracking estimation time, thus expanding the applicability of the suggested system for real-time location tracking purposes.
5. Conclusions
RTLS technology has been widely used for various purposes, including measuring productivity, monitoring equipment and workers, and preventing safety accidents. Among various objectives for using RTLS technologies, preventing safety accidents requires much higher accuracy because the accuracy is directly related to a human’s life.
This paper suggested an RFID-based RTLS capable of enhancing the accuracy of real-time location tracking in construction projects. Specifically, location tracking error mitigation algorithms were introduced in order to filter out erroneous logs due to multi-path, and assistant tags were used to increase the accuracy in tracking an object in a shadow area. In particular, to address the multi-path problem, the construction workers’ maximum moving velocity is applied to develop the suggested algorithm. Additionally, in the application of assistant tags, the suggested method of how to select proper readers is incorporated in the current assistant method.
The developed system was applied to a construction project and tested in terms of its location tracking accuracy and location estimation time. The test results showed that the application of error mitigation algorithms and assistant tags could increase location tracking accuracy by 77.3%, thereby demonstrating the strong potential of the algorithms and assistant tags to enhance location tracking accuracy in construction projects. However, this increased accuracy was gained at the expense of extended location estimation time, which is another important aspect in assessing the performance of an RTLS. In order to minimize the extra computational time for RTLS while maintaining its accuracy, a floor classification method that does not calculate the z-axis coordinate was proposed, thereby decreasing the computational time and effort.
Although the suggested system proved its applicability and effectiveness for real-time location tracking in construction sites, the following limitations need to be addressed in further research. First, the suggested method could be carried out in combination with Kalman filtering considering geometric constraints. Second, the performance of the system needs to be further validated in many different construction environments. In particular, the application of assistant tags may not be operated when a construction worker does his task solely without other workers who can take a role as an assistant tag. However, considering the fact that construction workers usually perform tasks as a group effort, this problem may not be critical. Lastly, the maximum speed of a target object should be tested in various situations in order to improve the effectiveness of the location tracking error mitigation algorithms.
Author Contributions
H.K. and S.H. conceived and designed the experiments; H.K. performed the experiments; H.K. developed the error mitigation algorithm; S.H. developed the assistant tag selection method; H.K. and S.H. wrote the paper.
Acknowledgments
This work was supported by Gyeongnam National University of Science and Technology Grant in 2017.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Amponsah-Tawiah, K. Occupational health and safety and sustainable development in Ghana. Int. J. Bus. Adm. 2013, 4, 74. [Google Scholar] [CrossRef]
- McKeown, R. Education for Sustainable Development Toolkit; Portland State University: Portland, OR, USA, 2002; Available online: http://www.esdtoolkit.org/ (accessed on 27 April 2018).
- Willard, B. The New Sustainability Advantage: Seven Business Case Benefits of a Triple Bottom Line; New Society Publishers: Gabriola, BC, Canada, 2012. [Google Scholar]
- Navon, R.; Kolton, O. Model for Automated Monitoring of Fall Hazards in Building Construction. J. Constr. Eng. Manag. 2006, 132, 733–740. [Google Scholar] [CrossRef]
- Fullerton, C.; Allread, B.; Teizer, J. Pro-Active-Real-Time Personnel Warning System. Available online: https://ascelibrary.org/doi/abs/10.1061/41020(339)4 (accessed on 8 April 2018).
- Wu, W.; Yang, H.; Chew, D.A.S.; Yang, S.; Gibb, A.G.F.; Li, Q. Towards an autonomous real-time tracking system of near-miss accidents on construction sites. Autom. Constr. 2010, 19, 134–141. [Google Scholar] [CrossRef]
- Chae, S.; Yoshida, T. Application of RFID technology to prevention of collision accident with heavy equipment. Autom. Constr. 2010, 19, 368–374. [Google Scholar] [CrossRef]
- Lee, H.; Lee, K.; Park, M.; Baek, Y.; Lee, S. RFID-Based Real-Time Locating System for Construction Safety Management. J. Comput. Civ. Eng. 2012, 26, 366–377. [Google Scholar] [CrossRef]
- Teizer, J.; Castro-Lacouture, D. Combined Ultra-Wideband Positioning and Range Imaging Sensing for Productivity and Safety Monitoring in Building Construction. In Proceedings of the 2007 ASCE International Workshop on Computing in Engineering, Reston, VA, USA, 24–27 July 2007; pp. 681–688. [Google Scholar]
- Teizer, J.; Caldas, C.; Haas, C. Real-Time Three-Dimensional Occupancy Grid Modeling for the Detection and Tracking of Construction Resources. J. Constr. Eng. Manag. 2007, 133, 880–888. [Google Scholar] [CrossRef]
- Chin, S.; Yoon, S.; Choi, C.; Cho, C. RFID+4D CAD for Progress Management of Structural Steel Works in High-Rise Buildings. J. Comput. Civ. Eng. 2008, 22, 74–89. [Google Scholar] [CrossRef]
- Cheng, T.; Teizer, J. Real-Time Data Collection and Visualization Technology in Construction. In Proceedings of the Construction Research Congress, ASCE, Reston, VA, USA, 8–10 May 2010; pp. 339–348. [Google Scholar]
- Song, J.; Haas, C.; Caldas, C. Tracking the Location of Materials on Construction Job Sites. J. Constr. Eng. Manag. 2006, 132, 911–918. [Google Scholar] [CrossRef]
- Torrent, D.; Caldas, C. Methodology for Automating the Identification and Localization of Construction Components on Industrial Projects. J. Comput. Civ. Eng. 2009, 23, 3–13. [Google Scholar] [CrossRef]
- Saidi, K.S.; Teizer, J.; Franaszek, M.; Lytle, A.M. Static and dynamic performance evaluation of a commercially-available ultra wideband tracking system. Autom. Constr. 2011, 20, 519–530. [Google Scholar] [CrossRef]
- Kim, H.; Lee, H.; Park, M.; Chung, B.; Hwang, S. Automated hazardous area identification using laborers’ actual and optimal routes. Autom. Constr. 2016, 65, 21–32. [Google Scholar] [CrossRef]
- Kim, H.; Ahn, C.R.; Yang, K. Identifying Safety Hazards Using Collective Bodily Responses of Workers. J. Constr. Eng. Manag. 2017, 143, 04016090–1-12. [Google Scholar] [CrossRef]
- Garmin Corporation, About GPS. Available online: http://www8.garmin.com/aboutGPS/ (accessed on 4 April 2018).
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. Wirel. Netw. 2004, 10, 701–710. [Google Scholar] [CrossRef]
- Jin, G.Y.; Lu, X.Y.; Park, M.S. An indoor localization mechanism using active RFID tag. In Proceedings of the IEEE International Confernational on Sensor Networks, Ubiquitous, and Trustworthy Computing, Taichung, Taiwan, 5–7 June 2006; pp. 1–4. [Google Scholar]
- Han, J.; Zhao, Y.; Cheng, Y.S.; Wong, T.L.; Wong, C.H. Improving Accuracy for 3D RFID Localization. Int. J. Distrib. Sens. Netw. 2012, 2012, 865184. [Google Scholar] [CrossRef]
- Ijaz, F.; Yang, H.K.; Ahmad, A.W.; Lee, C. Indoor positioning: A review of indoor ultrasonic positioning systems. In Proceedings of the IEEE 15th International Conference on Advanced Communication Technology (ICACT), PyeongChang, Korea, 27–30 January 2013; pp. 1146–1150. [Google Scholar]
- Zhang, D.; Xia, F.; Yang, Z.; Yao, L.; Zhao, W. Localization technologies for indoor human tracking. In Proceedings of the IEEE 5th International Conference on Future Information Technology (FutureTech), Busan, Korea, 21–23 May 2010; pp. 1–6. [Google Scholar]
- Yarovoy, A.G.; Zhuge, X.; Savelyev, T.G.; Ligthart, L.P. Comparison of UWB technologies for human being detection with radar. In Proceedings of the IEEE European Microwave Conference, Munich, Germany, 9–12 October 2007; pp. 1574–1577. [Google Scholar]
- Mora, H.; Gilart-Iglesias, V.; Pérez-del Hoyo, R.; Andújar-Montoya, M.D. A Comprehensive System for Monitoring Urban Accessibility in Smart Cities. Sensors 2017, 17, 1834. [Google Scholar] [CrossRef] [PubMed]
- Mora-Mora, H.; Gilart-Iglesias, V.; Gil, D.; Sirvent-Llamas, A. A computational architecture based on RFID sensors for traceability in smart cities. Sensors 2015, 15, 13591–13626. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gilart-Iglesias, V.; Mora, H.; Pérez-delHoyo, R.; García-Mayor, C. A computational method based on radio frequency technologies for the analysis of accessibility of disabled people in sustainable cities. Sustainability 2015, 7, 14935–14963. [Google Scholar] [CrossRef] [Green Version]
- Skibniewski, M.J.; Jang, W.S. Localization Technique for Automated Tracking of Construction Materials Utilizing Combined RF and Ultrasound Sensor Interfaces. In Proceedings of the ASCE Computing in Civil Engineering, Reston, VA, USA, 24–27 July 2007; pp. 657–664. [Google Scholar]
- Son, S.; Park, Y.; Baek, Y. Design and Implementation of Enhanced Asset Locating System for Vehicle Pooling in a Port Terminal. In Proceedings of the 2013 IEEE 27th International Conference on Advanced Information Networking and Applications (AINA), Barcelona, Spain, 25–28 March 2013; pp. 710–715. [Google Scholar]
- Lei, Z.; Taghaddos, H.; Olearczyk, J.; Al-Hussein, M.; Hermann, U. Automated Method for Checking Crane Paths for Heavy Lifts in Industrial Projects. J. Constr. Eng. Manag. 2013, 139, 04013011. [Google Scholar] [CrossRef]
- Cho, H.; Jung, Y.; Choi, H.; Jang, H.; Son, S.; Baek, Y. Precise location tracking system based on time difference of arrival over LR-WPAN. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, San Francisco, CA, USA, 19 September 2008; pp. 67–72. [Google Scholar]
- Mullen, D. The application of RFID technology in a Port. Port Technol. Int. 2005, 22, 181–182. [Google Scholar]
- Browning, R.C.; Baker, E.A.; Herron, J.A.; Kram, R. Effects of obesity and sex on the energetic cost and preferred speed of walking. J. Appl. Physiol. 2006, 100, 390–398. [Google Scholar] [CrossRef] [PubMed]
- Mohler, B.J.; Thompson, W.B.; Creem-Regehr, S.H.; Pick, H.L., Jr.; Warren, W.H., Jr. Visual flow influences gait transition speed and preferred walking speed. Exp. Brain Res. 2007, 181, 221–228. [Google Scholar] [CrossRef] [PubMed]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef]
- Ganeriwal, S.; Kumar, R.; Srivastava, M.B. Timing-sync protocol for sensor networks. In Proceedings of the ACM 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003; pp. 138–149. [Google Scholar]
- Maróti, M.; Kusy, B.; Simon, G.; Lédeczi, Á. The flooding time synchronization protocol. In Proceedings of the ACM 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 3–5 November 2004; pp. 39–49. [Google Scholar]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1996; Volume 2. [Google Scholar]
- Yu, K.; Sharp, I.; Guo, Y.J. Ground-Based Wireless Positioning; John Wiley & Sons: Hoboken, NJ, USA, 2009; Volume 5. [Google Scholar]
- Rohrig, C.; Muller, M. Indoor location tracking in non-line-of-sight environments using a IEEE 802.15. 4a wireless network. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems IROS, St. Louis, MO, USA, 10–15 October 2009; pp. 552–557. [Google Scholar]
- Park, S.H.; Kim, Y.J.; Lee, H.C.; Lim, M.T. Improved adaptive particle filter using adjusted variance and gradient data. In Proceedings of the IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, Seoul, Korea, 20–22 August 2008; pp. 650–655. [Google Scholar]
Figure 1.
Example of location-tracking error caused by multi-path.

Figure 2.
Elimination of tracking errors using possible range information.

Figure 3.
Concept of error log determination method.

Figure 4.
Error determination method.

Figure 5.
Elimination of tracking errors using maximum distance information: (a) Step 1; and (b) Step 2.
Figure 5.
Elimination of tracking errors using maximum distance information: (a) Step 1; and (b) Step 2.

Figure 6.
Assistant tag for tracking a target object in shadow area.

Figure 7.
Examples of GDOP: (a) good (low) GDOP; (b) poor (high) GDOP.

Figure 8.
Elimination of tracking errors using possible range information: (a) Before eliminating the tracking errors; and (b) After eliminating the tracking errors.
Figure 8.
Elimination of tracking errors using possible range information: (a) Before eliminating the tracking errors; and (b) After eliminating the tracking errors.

Figure 9.
Location tracking accuracy tests.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Location tracking accuracy test results.
| Tests | Tracking Environments | Location Tracking Accuracy | ||||
|---|---|---|---|---|---|---|
| Experiment A | Experiment B | Experiment C | Experiment D | |||
| Test 1 | Earth Work Area (Outdoor) | Tracking Error | 138 cm | 61 cm | 47 cm | 38 cm |
| Improvement | - | 55.8% | 65.9% | 72.5% | ||
| Test 2 | Steel Work Area (Outdoor) | Tracking Error | 158 cm | 120 cm | 96 cm | 70 cm |
| Improvement | - | 24.1% | 39.2% | 55.7% | ||
| Test 3 | Underground Parking Lot | Tracking Error | 116 cm | 73 cm | 76 cm | 51 cm |
| Improvement | - | 37.1% | 34.5% | 56.0% | ||
| Test 4 | Stock Yard (H-Beam piled) | Tracking Error | 791 cm | 321 cm | 148 cm | 96 cm |
| Improvement | - | 59.4% | 81.3% | 87.9% | ||
| Test 5 | Stock Yard (Brick piled) | Tracking Error | 549 cm | 243 cm | 152 cm | 88 cm |
| Improvement | - | 55.7% | 72.3% | 84.0% | ||
| Test 6 | Frame Structure (Indoor) | Tracking Error | 127 cm | 80 cm | 78 cm | 53 cm |
| Improvement | - | 37.0% | 38.6% | 58.3% | ||
| Test 7 | Wall Structure (Indoor) | Tracking Error | 78 cm | 71 cm | 57 cm | 35 cm |
| Improvement | - | 9.0% | 26.9% | 55.1% | ||
| Test 8 | Finishing Work Area | Tracking Error | 86 cm | 46 cm | 61 cm | 33 cm |
| Improvement | - | 46.5% | 29.1% | 61.6% | ||
| Average | Tracking Error | 255 cm | 127 cm | 89 cm | 58 cm | |
| Improvement | - | 50.3% | 65.0% | 77.3% | ||
Table 2.
Location tracking estimation time test results.
| Experimental Settings | Location Tracking Estimation Time (ms) | Time Reduction ((B–C)/B) | ||||
|---|---|---|---|---|---|---|
| Number of Floors | Number of Readers | Number of Tags | Experiment A | Experiment B | Experiment C | |
| 1 | 4 | 10 | 157 | 227 | 173 | 23.8% |
| 20 | 282 | 348 | 309 | 11.2% | ||
| 30 | 418 | 525 | 445 | 15.2% | ||
| 3 | 12 | 10 | 284 | 377 | 307 | 18.6% |
| 30 | 376 | 497 | 424 | 14.7% | ||
| 50 | 483 | 687 | 519 | 24.5% | ||
| 5 | 20 | 10 | 254 | 409 | 298 | 27.1% |
| 30 | 448 | 564 | 420 | 25.5% | ||
| 50 | 756 | 863 | 628 | 27.2% | ||
| Average | 384.2 | 499.7 | 391.4 | 21.7% | ||
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Kim, H.; Han, S. Accuracy Improvement of Real-Time Location Tracking for Construction Workers. Sustainability 2018, 10, 1488. https://doi.org/10.3390/su10051488
AMA Style
Kim H, Han S. Accuracy Improvement of Real-Time Location Tracking for Construction Workers. Sustainability. 2018; 10(5):1488. https://doi.org/10.3390/su10051488
Chicago/Turabian StyleKim, Hyunsoo, and Sangwon Han. 2018. "Accuracy Improvement of Real-Time Location Tracking for Construction Workers" Sustainability 10, no. 5: 1488. https://doi.org/10.3390/su10051488
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.