Economic and Environmental Evaluation of a Brick Delivery System Based on Multi-Trip Vehicle Loader Routing Problem for Small Construction Sites



Abstract
:1. Introduction
2. Materials and Methods
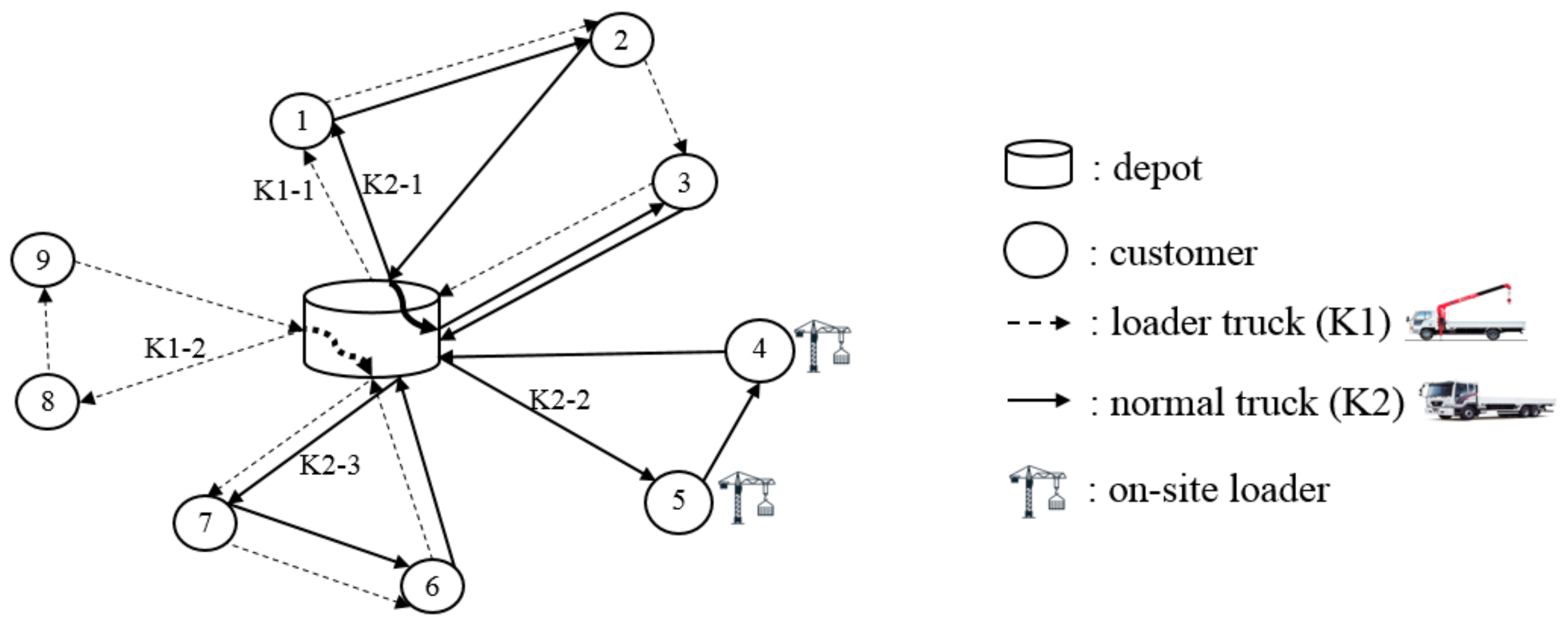
2.1. Problem Statement
2.2. Mathematical Modeling
- : 1 if an arc (i, j) is used by a nth vehicle of a type k, 0 otherwise, and five types of continuous decision variables,
- : beginning and ending times of an unloading operation by a nth vehicle of a type k, at a node i,
- : departing time from a depot to node j and returning time from node i to a depot of a nth vehicle of a type k,
- : amounts of products delivered to node i by a nth vehicle of a type k.
- , which represents the number of vehicles of a type k, one type of binary decision variables:
- : 1 if an ending path (i, 0) of a route is followed by another route which starts through a path (0, j) by a nth vehicle of a type k, 0 otherwise, and one type of continuous decision variables:
- : cumulative amounts of products delivered by a nth vehicle of a type k up to node i in a single trip from and to the depot.
3. Results
3.1. Data for Case Studies
3.1.1. Vehicle Types and Cost Estimates
3.1.2. Distances and Demands
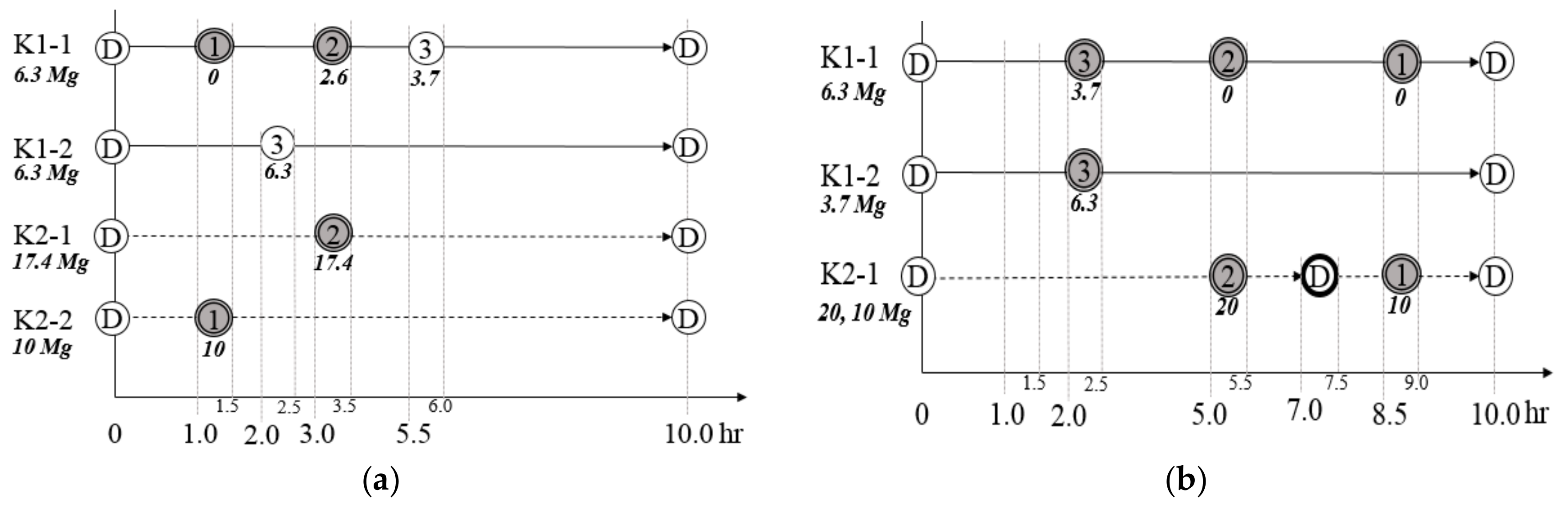
3.2. Results of Routes and Schedules
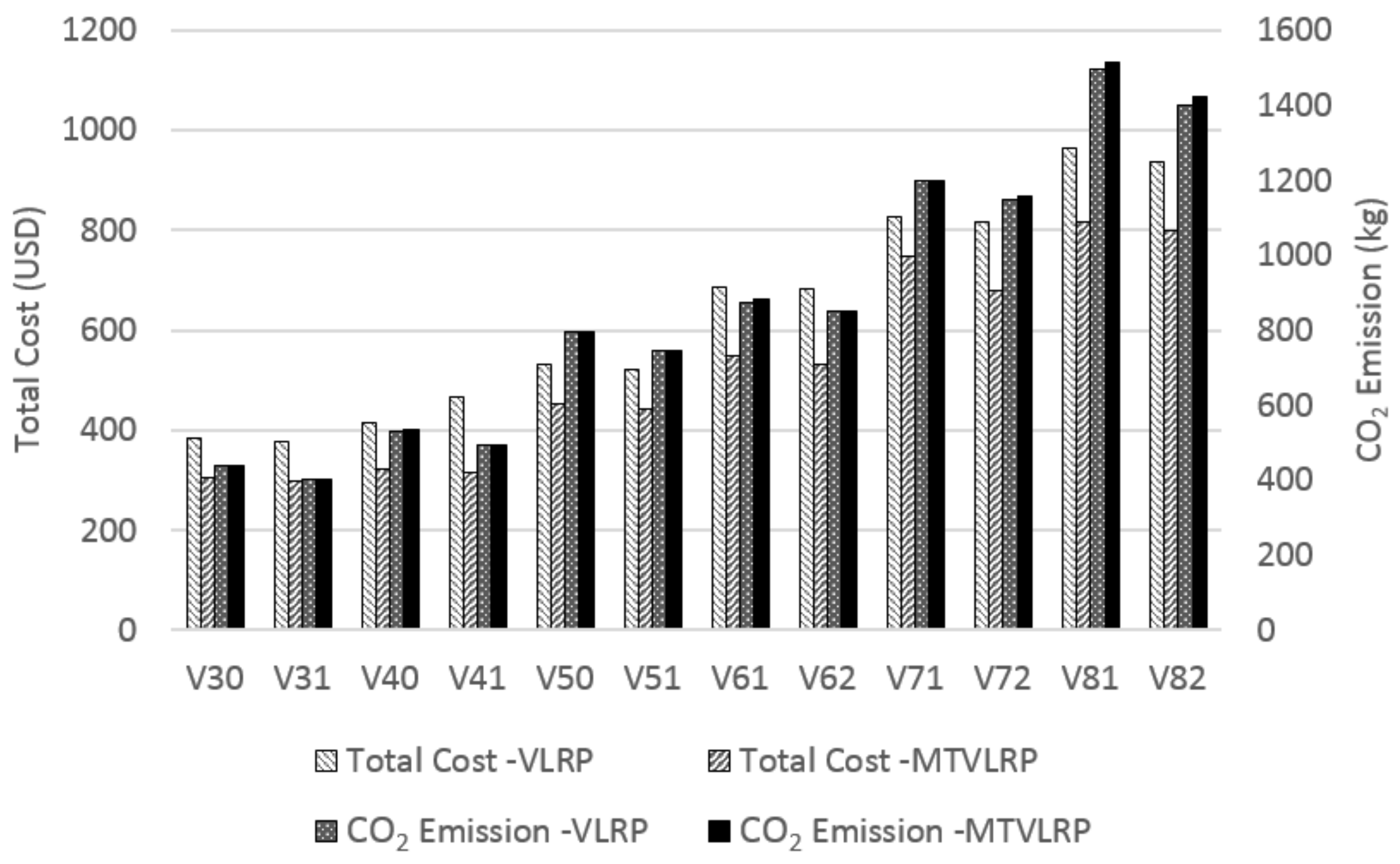
3.3. Economic and Environmental Analysis
4. Discussion
5. Conclusions
Author Contributions
Conflicts of Interest
References
- Chao, I.M. A tabu search method for the truck and trailer routing problem. Comput. Oper. Res. 2002, 29, 33–51. [Google Scholar] [CrossRef]
- Derigs, U.; Pullmann, M.; Vogel, U. Truck and trailer routing-problems, heuristics and computational experience. Comput. Oper. Res. 2013, 40, 536–546. [Google Scholar] [CrossRef]
- Drexl, M. Synchronization in Vehicle Routing—A Survey of VRPs with Multiple Synchronization Constraints. Transp. Sci. 2012, 46, 297–316. [Google Scholar] [CrossRef]
- Chen, L.; Langevin, A.; Lu, Z. Integrated scheduling of crane handling and truck transportation in a maritime container terminal. Eur. J. Oper. Res. 2013, 225, 142–152. [Google Scholar] [CrossRef]
- An, H.; Byon, Y.J. Vehicle loader routing problem. In Proceedings of the 2016 Institute of Industrial and Systems Engineers Annual Conference & Expo, Anaheim, CA, USA, 22–25 May 2016. [Google Scholar]
- Jabali, O.; Leus, R.; Van Woensel, T.; Kok, T. Self-imposed time windows in vehicle routing problems. OR Spectr. 2015, 37, 331–352. [Google Scholar] [CrossRef]
- Dantzig, G.B.; Ramser, J.H. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Desrochers, M.; Desrosiers, J.; Solomon, M. A new optimization algorithm for the vehicle routing problem with time windows. Oper. Res. 1992, 40, 342–354. [Google Scholar] [CrossRef]
- Renaud, J.; Laporte, G.; Boctor, F.F. A tabu search heuristic for the multi-depot vehicle routing problem. Comput. Oper. Res. 1996, 23, 229–235. [Google Scholar] [CrossRef]
- Wassan, N.A.; Nagy, G. Vehicle routing problem with deliveries and pickups: Modelling issues and meta-heuristics solution approaches. Int. J. Trans. 2014, 2, 95–110. [Google Scholar] [CrossRef]
- Koç, C.; Bektaş, T.; Jabali, O.; Laporte, G. Thirty years of heterogeneous vehicle routing. Eur. J. Oper. Res. 2016, 249, 1–21. [Google Scholar] [CrossRef]
- Brandao, J. A Decision Support System and Algorithms for the Vehicle Routing and Scheduling Problem. Ph.D. Thesis, Lancaster University, Lancaster, UK, 1994, unpublished. [Google Scholar]
- Salhi, S. The Integration of Routing into the Location-Allocation and Vehicle Composition Problems. Ph.D. Thesis, University of Lancaster, Lancaster, UK, 1987, unpublished. [Google Scholar]
- Brandao, J.; Mercer, A. A tabu search algorithm for the multi-trip vehicle routing and scheduling problem. Eur. J. Oper. Res. 1997, 100, 180–191. [Google Scholar] [CrossRef]
- Koc, C.; Karaoglan, I. A branch and cut algorithm for the vehicle routing problem with multiple use of vehicles. In Proceedings of the 41st International Conference on Computers & Industrial Engineering, Los Angeles, CA, USA, 23–25 October 2011; pp. 554–559. [Google Scholar]
- Mingozzi, A.; Roberti, R.; Toth, P. An exact algorithm for the multitrip vehicle routing problem. INFORMS J. Comput. 2013, 25, 193–207. [Google Scholar] [CrossRef]
- Hernandez, F.; Feillet, D.; Giroudeau, R.; Naud, O. A new exact algorithm to solve the multi-trip vehicle routing problem with time windows and limited duration. Q. J. Oper. Res. 2014, 12, 235–259. [Google Scholar] [CrossRef]
- Zhang, Y.; Qi, M.; Miao, L.; Wu, G. A generalized multi-depot vehicle routing problem with replenishment based on LocalSolver. Int. J. Ind. Eng. Comput. 2015, 6, 81–98. [Google Scholar] [CrossRef]
- Cattaruzza, D.; Absi, N.; Feillet, D. The multi-trip vehicle routing problem with time windows and release dates. Transp. Sci. 2016, 50, 676–693. [Google Scholar] [CrossRef]
- Braekers, K.; Ramaekers, K.; Nieuwenhuyse, I.V. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Hwang, T.; Ouyang, Y. Urban freight truck routing under stochastic congestion and emission considerations. Sustainability 2015, 7, 6610–6625. [Google Scholar] [CrossRef]
- Ji, S.; Sun, Q. Low-carbon planning and design in B & R logistics service: A case study of an E-commerce big data platform in China. Sustainability 2017, 9, 2052. [Google Scholar] [CrossRef]
- Guo, F.; Liu, Q.; Liu, D.; Guo, Z. On production and green transportation coordination in a sustainable global supply chain. Sustainability 2017, 9, 2071. [Google Scholar] [CrossRef]
- Hajibabai, L.; Nourbakhsh, S.M.; Ouyang, Y.; Peng, F. Network routing of snowplow with resource replenishment and plowing priorities formulation, algorithm, and application. Transp. Res. Rec. 2014, 2440, 16–25. [Google Scholar] [CrossRef]
- HAOY. Available online: https://xzhaoyi.en.alibaba.com/?spm=a2700.8304367.topnav.1.a23b70b5a8duFX (accessed on 4 May 2018).
- U.S. Department of Transportation. Light-duty vehicle greenhouse gas emission standards and corporate average fuel economy standards. Fed. Regist. 2010, 75, 25324–25728. [Google Scholar]
- Fact #861 23 February 2015 Idle Fuel Consumption for Selected Gasoline and Diesel Vehicles. Available online: Energy.gov/eere/vehicles/fact-861-february-23-2015-idle-fuel-consumption-selected-gasoline-and-diesel-vehicles (accessed on 20 February 2018).
- An, H.; Searcy, S.W. Economic and energy evaluation of a logistics system based on biomass modules. Biomass Bioenergy 2012, 46, 190–202. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indices |
| i, j: node indices |
| k: vehicle type |
| n: vehicle index |
| Set |
| : set of arcs incident from (to) a node i |
| E: set of arcs |
| K: set of vehicle types ( = 1: loader truck, = 2: normal truck) |
| : set of vehicles of a vehicle type () |
| : set of nodes where a loader is needed |
| : set of nodes where a loader is not needed (i.e., an installed loader exists) |
| : set of nodes from which arcs are incident to a depot () |
| : set of nodes to which arcs are incident from a depot () |
| V: set of nodes except a depot () |
| : set of all nodes () |
| Parameters |
| : transportation cost per unit time by a vehicle type k |
| : waiting cost per unit time by a vehicle type k |
| : demand at node i. |
| M: big number |
| : vehicle cost of a vehicle type k during a planning horizon |
| : capacity of a vehicle type k |
| : travel time between nodes i and j by a vehicle type k |
| : average time to load (unload) product at a depot (at customers’ sites) |
| : length of the planning horizon |
| No | Case | Number of Customers | Number of Max Trucks | ||
|---|---|---|---|---|---|
| Total | With Loader | Loader | Normal | ||
| 1 | V30 | 3 | 0 | 2 | 2 |
| 2 | V31 | 3 | 1 | 2 | 2 |
| 3 | V40 | 4 | 0 | 3 | 3 |
| 4 | V41 | 4 | 1 | 3 | 3 |
| 5 | V50 | 5 | 0 | 4 | 4 |
| 6 | V51 | 5 | 1 | 4 | 4 |
| 7 | V61 | 6 | 1 | 4 | 4 |
| 8 | V62 | 6 | 2 | 4 | 4 |
| 9 | V71 | 7 | 1 | 6 | 6 |
| 10 | V72 | 7 | 2 | 6 | 6 |
| 11 | V81 | 8 | 1 | 7 | 7 |
| 12 | V82 | 8 | 2 | 7 | 7 |
| Distance (km) | Depot | V1 | V2 | V3 | V4 | V5 | V6 | V7 | V8 |
|---|---|---|---|---|---|---|---|---|---|
| Depot | 0 | 60 | 120 | 120 | 120 | 180 | 120 | 240 | 240 |
| V1 | 60 | 0 | 90 | 180 | 180 | 180 | 150 | 300 | 270 |
| V2 | 120 | 90 | 0 | 120 | 240 | 240 | 240 | 360 | 360 |
| V3 | 120 | 180 | 120 | 0 | 180 | 240 | 240 | 300 | 360 |
| V4 | 120 | 180 | 240 | 180 | 0 | 180 | 180 | 120 | 300 |
| V5 | 180 | 180 | 240 | 240 | 180 | 0 | 120 | 120 | 120 |
| V6 | 120 | 150 | 240 | 240 | 180 | 120 | 0 | 240 | 120 |
| V7 | 240 | 300 | 360 | 300 | 120 | 120 | 240 | 0 | 240 |
| V8 | 240 | 270 | 360 | 360 | 300 | 120 | 120 | 240 | 0 |
| Demand (Mg) | - | 10 | 20 | 10 | 5 | 15 | 10 | 15 | 10 |
| Case | Total Cost | Vehicle Cost | Operating Cost | ||||||
|---|---|---|---|---|---|---|---|---|---|
| VLRP | MTVLRP | ∆ 1 | VLRP | MTVLRP | ∆ 1 | VLRP | MTVLRP | ∆ 1 | |
| V30 | 385.1 | 305.1 | −20.8% | 300.0 | 220.0 | −26.7% | 85.1 | 85.1 | 0.0% |
| V31 | 376.6 | 296.6 | −21.2% | 300.0 | 220.0 | −26.7% | 76.6 | 76.6 | 0.0% |
| V40 | 413.7 | 323.7 | −21.8% | 310.0 | 220.0 | −29.0% | 103.7 | 103.7 | 0.0% |
| V41 | 465.1 | 315.1 | −32.3% | 370.0 | 220.0 | −40.5% | 95.1 | 95.1 | 0.0% |
| V50 | 532.7 | 452.7 | −15.0% | 380.0 | 300.0 | −21.1% | 152.7 | 152.7 | 0.0% |
| V51 | 522.5 | 442.5 | −15.3% | 380.0 | 300.0 | −21.1% | 142.5 | 142.5 | 0.0% |
| V61 | 687.0 | 548.9 | −20.1% | 520.0 | 380.0 | −26.9% | 167.0 | 168.9 | 1.1% |
| V62 | 681.1 | 531.1 | −22.0% | 520.0 | 370.0 | −28.8% | 161.1 | 161.1 | 0.0% |
| V71 | 827.6 | 747.6 | −9.7% | 600.0 | 520.0 | −13.3% | 227.6 | 227.6 | 0.0% |
| V72 | 817.4 | 679.3 | −16.9% | 600.0 | 460.0 | −23.3% | 217.4 | 219.3 | 0.9% |
| V81 | 962.8 | 816.3 | −15.2% | 680.0 | 530.0 | −22.1% | 282.8 | 286.3 | 1.2% |
| V82 | 934.8 | 798.6 | −14.6% | 670.0 | 530.0 | −20.9% | 264.8 | 268.6 | 1.5% |
| Case | Total Travel Time (hour) | Total Idle Time (hour) | Total CO2 Emission (kg) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| VLRP | MTVLRP | VLRP | MTVLRP | VLRP | MTVLRP | ∆ 1 | |||||
| Loader | Normal | Loader | Normal | Loader | Normal | Loader | Normal | ||||
| V30 | 10.5 | 6.0 | 10.5 | 6.0 | 2.0 | 1.0 | 2.0 | 1.0 | 438 | 438 | 0.0% |
| V31 | 6.5 | 8.0 | 6.5 | 8.0 | 1.5 | 1.0 | 1.5 | 1.0 | 400 | 400 | 0.0% |
| V40 | 9.5 | 10.0 | 14.5 | 6.0 | 2.0 | 1.5 | 2.5 | 1.0 | 531 | 536 | 0.9% |
| V41 | 10.5 | 8.0 | 10.5 | 8.0 | 2.0 | 1.0 | 2.0 | 1.0 | 494 | 494 | 0.0% |
| V50 | 14.5 | 15.0 | 14.5 | 15.0 | 2.5 | 2.0 | 2.5 | 2.0 | 797 | 797 | 0.0% |
| V51 | 12.5 | 15.0 | 12.5 | 15.0 | 2.0 | 2.0 | 2.0 | 2.0 | 746 | 746 | 0.0% |
| V61 | 17.5 | 15.0 | 15.5 | 17.0 | 3.0 | 2.0 | 2.5 | 2.5 | 871 | 880 | 1.1% |
| V62 | 16.5 | 15.0 | 16.5 | 15.0 | 2.5 | 2.0 | 2.5 | 2.0 | 851 | 851 | 0.0% |
| V71 | 21.5 | 23.0 | 21.5 | 23.0 | 3.5 | 2.5 | 3.5 | 2.5 | 1198 | 1198 | 0.0% |
| V72 | 19.5 | 23.0 | 17.5 | 25.0 | 3.0 | 2.5 | 2.5 | 3.0 | 1147 | 1156 | 0.8% |
| V81 | 29.0 | 27.0 | 25.0 | 31.0 | 4.0 | 3.0 | 3.5 | 3.5 | 1494 | 1513 | 1.3% |
| V82 | 27.5 | 25.0 | 23.0 | 29.5 | 3.5 | 3.0 | 3.0 | 3.5 | 1399 | 1420 | 1.5% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
An, H.; Byon, Y.-J.; Cho, C.-S. Economic and Environmental Evaluation of a Brick Delivery System Based on Multi-Trip Vehicle Loader Routing Problem for Small Construction Sites. Sustainability 2018, 10, 1427. https://doi.org/10.3390/su10051427
An H, Byon Y-J, Cho C-S. Economic and Environmental Evaluation of a Brick Delivery System Based on Multi-Trip Vehicle Loader Routing Problem for Small Construction Sites. Sustainability. 2018; 10(5):1427. https://doi.org/10.3390/su10051427
Chicago/Turabian StyleAn, Heungjo, Young-Ji Byon, and Chung-Suk Cho. 2018. "Economic and Environmental Evaluation of a Brick Delivery System Based on Multi-Trip Vehicle Loader Routing Problem for Small Construction Sites" Sustainability 10, no. 5: 1427. https://doi.org/10.3390/su10051427